JP6740944B2 - ハイブリッド車両の制御装置 - Google Patents
ハイブリッド車両の制御装置 Download PDFInfo
- Publication number
- JP6740944B2 JP6740944B2 JP2017064617A JP2017064617A JP6740944B2 JP 6740944 B2 JP6740944 B2 JP 6740944B2 JP 2017064617 A JP2017064617 A JP 2017064617A JP 2017064617 A JP2017064617 A JP 2017064617A JP 6740944 B2 JP6740944 B2 JP 6740944B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- engine
- rotation speed
- voltage
- power line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000010586 diagram Methods 0.000 claims description 10
- 239000003990 capacitor Substances 0.000 description 9
- 238000000034 method Methods 0.000 description 9
- 238000004891 communication Methods 0.000 description 8
- 238000012545 processing Methods 0.000 description 7
- 230000007423 decrease Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 239000000446 fuel Substances 0.000 description 3
- 238000009499 grossing Methods 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 238000012805 post-processing Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 229910052739 hydrogen Inorganic materials 0.000 description 1
- 239000001257 hydrogen Substances 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
Images




Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Ac Motors In General (AREA)
Description
エンジンと、第1モータと、前記第1モータと前記エンジンと駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図において前記第1モータ,前記エンジン,前記駆動軸の順に並ぶように接続されたプラネタリギヤと、前記駆動軸に接続された第2モータと、前記第1モータを駆動する第1インバータと、前記第2モータを駆動する第2インバータと、蓄電装置と、前記第1,第2インバータが接続された第1電力ラインと前記蓄電装置が接続された第2電力ラインとに接続され前記第1電力ラインと前記第2電力ラインとの間で電圧の変更を伴って電力のやりとりを行なう昇降圧コンバータと、を備えるハイブリッド車両に搭載され、前記エンジンと前記第1,第2インバータと前記昇降圧コンバータとを制御する、ハイブリッド車両の制御装置であって、
前記第1インバータをシャットダウンした状態で走行する所定走行時において、逆起電圧定数を用いて算出された前記第1モータの逆起電圧が前記第1電力ラインの電圧以上となったときには、前記第1インバータのシャットダウンを解除し、
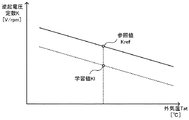
システムを起動する場合において、ソーク時間が所定時間以上であるときには、前記第1モータの回転数が学習許可回転数となるように前記エンジンを制御し、その後、前記第1モータの回転数が前記学習許可回転数以上となったときには、前記逆起電圧定数を学習し、
前記学習により得られた前記逆起電圧定数の学習値と参照値とを用いて前記逆起電圧定数を補正する、
ことを要旨とする。
Claims (1)
- エンジンと、第1モータと、前記第1モータと前記エンジンと駆動輪に連結された駆動軸との3軸に3つの回転要素が共線図において前記第1モータ,前記エンジン,前記駆動軸の順に並ぶように接続されたプラネタリギヤと、前記駆動軸に接続された第2モータと、前記第1モータを駆動する第1インバータと、前記第2モータを駆動する第2インバータと、蓄電装置と、前記第1,第2インバータが接続された第1電力ラインと前記蓄電装置が接続された第2電力ラインとに接続され前記第1電力ラインと前記第2電力ラインとの間で電圧の変更を伴って電力のやりとりを行なう昇降圧コンバータと、を備えるハイブリッド車両に搭載され、前記エンジンと前記第1,第2インバータと前記昇降圧コンバータとを制御する、ハイブリッド車両の制御装置であって、
前記第1インバータをシャットダウンした状態で走行する所定走行時において、逆起電圧定数を用いて算出された前記第1モータの逆起電圧が前記第1電力ラインの電圧以上となったときには、前記第1インバータのシャットダウンを解除し、
システムを起動する場合において、ソーク時間が所定時間以上であるときには、前記第1モータの回転数が学習許可回転数となるように前記エンジンを制御し、その後、前記第1モータの回転数が前記学習許可回転数以上となったときには、前記逆起電圧定数を学習し、前記学習により得られた前記逆起電圧定数の学習値と参照値とを用いて前記逆起電圧定数を補正する、
ハイブリッド車両の制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017064617A JP6740944B2 (ja) | 2017-03-29 | 2017-03-29 | ハイブリッド車両の制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017064617A JP6740944B2 (ja) | 2017-03-29 | 2017-03-29 | ハイブリッド車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018167614A JP2018167614A (ja) | 2018-11-01 |
| JP6740944B2 true JP6740944B2 (ja) | 2020-08-19 |
Family
ID=64019852
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017064617A Expired - Fee Related JP6740944B2 (ja) | 2017-03-29 | 2017-03-29 | ハイブリッド車両の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6740944B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7345972B2 (ja) * | 2019-07-31 | 2023-09-19 | ダイハツ工業株式会社 | モータ制御装置 |
| CN117294199B (zh) * | 2023-11-27 | 2024-02-13 | 四川奥库科技有限公司 | 电机反电动势常数在线辨识方法 |
-
2017
- 2017-03-29 JP JP2017064617A patent/JP6740944B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018167614A (ja) | 2018-11-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6392653B2 (ja) | ハイブリッド自動車 | |
| JP6183339B2 (ja) | ハイブリッド自動車 | |
| JP6888512B2 (ja) | ハイブリッド自動車 | |
| CN105936209A (zh) | 混合动力车辆 | |
| US9682693B2 (en) | Hybrid vehicle | |
| JP4123269B2 (ja) | 動力出力装置およびこれを搭載する車両並びに動力出力装置の制御方法 | |
| JP6575544B2 (ja) | ハイブリッド自動車 | |
| JP2021084537A (ja) | ハイブリッド車両 | |
| JP6772947B2 (ja) | ハイブリッド自動車 | |
| JP6652081B2 (ja) | ハイブリッド自動車 | |
| JP6760194B2 (ja) | ハイブリッド車両 | |
| JP6740944B2 (ja) | ハイブリッド車両の制御装置 | |
| CN108569273B (zh) | 混合动力车辆及其控制方法 | |
| JP2013123941A (ja) | ハイブリッド自動車 | |
| JP2011162130A (ja) | ハイブリッド車およびその制御方法 | |
| JP2015199411A (ja) | ハイブリッド車 | |
| JP2008007018A (ja) | 動力出力装置およびこれを搭載する車両並びに動力出力装置の制御方法 | |
| JP6769366B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2013212774A (ja) | ハイブリッド車両 | |
| JP6812895B2 (ja) | ハイブリッド車両 | |
| JP6888511B2 (ja) | ハイブリッド自動車 | |
| JP6607217B2 (ja) | ハイブリッド自動車 | |
| JP6741903B2 (ja) | ハイブリッド車両の制御装置 | |
| JP2014183718A (ja) | 駆動装置およびこれを搭載する車両 | |
| JP6973289B2 (ja) | ハイブリッド自動車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190724 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200605 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200623 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200706 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6740944 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |