JP5781541B2 - 露光方法 - Google Patents
露光方法 Download PDFInfo
- Publication number
- JP5781541B2 JP5781541B2 JP2012546449A JP2012546449A JP5781541B2 JP 5781541 B2 JP5781541 B2 JP 5781541B2 JP 2012546449 A JP2012546449 A JP 2012546449A JP 2012546449 A JP2012546449 A JP 2012546449A JP 5781541 B2 JP5781541 B2 JP 5781541B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- target
- sensors
- electrode
- wafer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 74
- 239000010410 layer Substances 0.000 claims description 121
- 238000005259 measurement Methods 0.000 claims description 103
- 238000001459 lithography Methods 0.000 claims description 71
- 238000012545 processing Methods 0.000 claims description 53
- 238000012937 correction Methods 0.000 claims description 43
- 239000010409 thin film Substances 0.000 claims description 40
- 239000010408 film Substances 0.000 claims description 24
- 230000008859 change Effects 0.000 claims description 23
- 230000002093 peripheral effect Effects 0.000 claims description 13
- 239000011241 protective layer Substances 0.000 claims description 9
- 239000003990 capacitor Substances 0.000 claims description 8
- 229910052724 xenon Inorganic materials 0.000 claims 5
- FHNFHKCVQCLJFQ-UHFFFAOYSA-N xenon atom Chemical compound [Xe] FHNFHKCVQCLJFQ-UHFFFAOYSA-N 0.000 claims 5
- 241000287463 Phalacrocorax Species 0.000 claims 1
- 235000012431 wafers Nutrition 0.000 description 176
- 239000000758 substrate Substances 0.000 description 60
- 238000010586 diagram Methods 0.000 description 41
- 239000004020 conductor Substances 0.000 description 34
- 239000000523 sample Substances 0.000 description 23
- 230000005684 electric field Effects 0.000 description 21
- 238000013461 design Methods 0.000 description 17
- 230000006870 function Effects 0.000 description 16
- 230000003071 parasitic effect Effects 0.000 description 16
- 239000000463 material Substances 0.000 description 15
- 238000004519 manufacturing process Methods 0.000 description 14
- 239000000853 adhesive Substances 0.000 description 12
- 230000001070 adhesive effect Effects 0.000 description 12
- 230000000694 effects Effects 0.000 description 12
- 230000001360 synchronised effect Effects 0.000 description 12
- 239000002245 particle Substances 0.000 description 11
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 10
- 230000008569 process Effects 0.000 description 10
- 229910052710 silicon Inorganic materials 0.000 description 10
- 239000010703 silicon Substances 0.000 description 10
- RZVAJINKPMORJF-UHFFFAOYSA-N Acetaminophen Chemical compound CC(=O)NC1=CC=C(O)C=C1 RZVAJINKPMORJF-UHFFFAOYSA-N 0.000 description 9
- 239000005297 pyrex Substances 0.000 description 9
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 8
- 229910052802 copper Inorganic materials 0.000 description 8
- 239000010949 copper Substances 0.000 description 8
- 230000035945 sensitivity Effects 0.000 description 8
- 230000008901 benefit Effects 0.000 description 6
- 238000007781 pre-processing Methods 0.000 description 6
- 230000001681 protective effect Effects 0.000 description 6
- 238000012546 transfer Methods 0.000 description 6
- 238000004422 calculation algorithm Methods 0.000 description 5
- 230000010363 phase shift Effects 0.000 description 5
- 229920003223 poly(pyromellitimide-1,4-diphenyl ether) Polymers 0.000 description 5
- 230000002829 reductive effect Effects 0.000 description 5
- 238000005452 bending Methods 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 239000011810 insulating material Substances 0.000 description 4
- 239000012528 membrane Substances 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 229920001721 polyimide Polymers 0.000 description 4
- 125000006850 spacer group Chemical group 0.000 description 4
- 239000006096 absorbing agent Substances 0.000 description 3
- 239000011248 coating agent Substances 0.000 description 3
- 238000000576 coating method Methods 0.000 description 3
- 238000000609 electron-beam lithography Methods 0.000 description 3
- 238000005530 etching Methods 0.000 description 3
- 239000011159 matrix material Substances 0.000 description 3
- 238000007639 printing Methods 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 230000035939 shock Effects 0.000 description 3
- 239000000356 contaminant Substances 0.000 description 2
- 238000010894 electron beam technology Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000017525 heat dissipation Effects 0.000 description 2
- 239000012212 insulator Substances 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 238000000691 measurement method Methods 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 238000001465 metallisation Methods 0.000 description 2
- 238000000059 patterning Methods 0.000 description 2
- 238000004026 adhesive bonding Methods 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000003989 dielectric material Substances 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000005562 fading Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 238000011065 in-situ storage Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 229920001169 thermoplastic Polymers 0.000 description 1
Images






























































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/02—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness
- G01B7/023—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring length, width or thickness for measuring distance between sensor and object
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D3/00—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups
- G01D3/028—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups mitigating undesired influences, e.g. temperature, pressure
- G01D3/036—Indicating or recording apparatus with provision for the special purposes referred to in the subgroups mitigating undesired influences, e.g. temperature, pressure on measuring arrangements themselves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/24—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying capacitance
- G01D5/241—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying capacitance by relative movement of capacitor electrodes
- G01D5/2417—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying capacitance by relative movement of capacitor electrodes by varying separation
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7003—Alignment type or strategy, e.g. leveling, global alignment
- G03F9/7023—Aligning or positioning in direction perpendicular to substrate surface
- G03F9/7026—Focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7049—Technique, e.g. interferometric
- G03F9/7053—Non-optical, e.g. mechanical, capacitive, using an electron beam, acoustic or thermal waves
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Electron Beam Exposure (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Measurement Of Resistance Or Impedance (AREA)
- Investigating Or Analyzing Materials By The Use Of Electric Means (AREA)
Description
【図1A】 静電容量センサの断面図である。
【図1B】 図1Aの静電容量センサの端面図である。
【図2】 平行プレート電極構成の単純化した概略図である。
【図3】 静電容量センサプローブと、接地された導電性ターゲットとの図である。
【図4】 差動測定構成の2つの静電容量センサプローブと、接地された導電性ターゲットとの図である。
【図5】 薄膜構造を備えた静電容量センサの断面図である。
【図6A】 薄膜センサの実施形態の断面図である。
【図6B】 薄膜センサの実施形態の断面図である。
【図6C】 薄膜センサの実施形態の断面図である。
【図6D】 薄膜センサの実施形態の断面図である。
【図6E】 図6Aと図6Bのセンサの上面図である。
【図6F】 図6Dのセンサの上面図である。
【図7A】 正方形の感知電極を備えた薄膜センサの上面図である。
【図7B】 図7Aのセンサの断面図である。
【図8A】 円形の感知電極を備えた薄膜センサの上面図である。
【図8B】 図8Aのセンサの断面図である。
【図9A】 統合された差動薄膜センサの実施形態の断面図である。
【図9B】 統合された差動薄膜センサの実施形態の断面図である。
【図9C】 統合された差動薄膜センサの実施形態の断面図である。
【図9D】 統合された差動薄膜センサの上面図である。
【図10A】 薄膜静電容量センサの断面図である。
【図10B】 薄膜静電容量センサの断面図である。
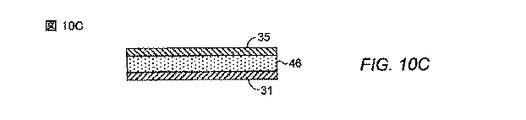
【図10C】 薄膜静電容量センサの断面図である。
【図10D】 薄膜静電容量センサの断面図である。
【図11】 接続線と接触パッドとを備えたセンサの上面図である。
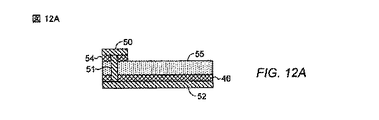
【図12A】 接触パッド構造の断面図である。
【図12B】 接触パッド構造の断面図である。
【図13A】 共通の基板上に形成されている、センサと、接続線と、接触パッドとの図である。
【図13B】 共通の基板上に形成されている、センサと、接続線と、接触パッドとの図である。
【図13C】 共通の基板上に形成されている、センサと、接続線と、接触パッドとの図である。
【図13D】 共通の基板上に形成されている、センサと、接続線と、接触パッドとの図である。
【図14】 リソグラフィマシンにマウントされたセンサの側面図である。
【図15A】 フレックスプリントコネクタの図である。
【図15B】 フレックスプリントコネクタの図である。
【図16A】 荷電粒子リソグラフィマシンの投影レンズのスタックの断面図である。
【図16B】 荷電粒子リソグラフィマシンの投影レンズのスタックの断面図である。
【図17A】 統合されたフレックスプリントコネクタと、複数のセンサとを有するフレキシブルプリント回路構造の図である。
【図17B】 統合されたフレックスプリントコネクタと、複数のセンサとを有するフレキシブルプリント回路構造の図である。
【図17C】 統合されたフレックスプリントコネクタと、複数のセンサとを有するフレキシブルプリント回路構造の図である。
【図17D】 統合されたフレックスプリントコネクタと、複数のセンサとを有するフレキシブルプリント回路構造の図である。
【図18】 リソグラフィマシン上のセンサの別の接続構成である。
【図19A】 統合されたフレキシブルプリント回路構造をリソグラフィマシン上にマウントする構成の図である。
【図19B】 統合されたフレキシブルプリント回路構造をリソグラフィマシン上にマウントする構成の図である。
【図20A】 マウントプレート上の静電容量センサの構成の図である。
【図20B】 マウントプレート上の静電容量センサの構成の図である。
【図20C】 対角線上に配置された静電容量センサの図である。
【図20D】 対角線上に配置された静電容量センサの図である。
【図21A】 複数の静電容量センサが上部に形成されている、薄膜構造の図である。
【図21B】 複数の静電容量センサが上部に形成されている、薄膜構造の図である。
【図21C】 統合されたフレックスプリントコネクタと、複数のセンサとを備えたフレキシブルプリント回路構造の図である。
【図21D】 統合されたフレックスプリントコネクタの断面図である。
【図22】 センサシステムと信号処理システムとの概略図である。
【図23A】 電流源を備えた高インピーダンス増幅器回路の単純化した回路図である。
【図23B】 電流源を備えた差動センサ構成の単純化した回路図である。
【図24A】 電圧源を備えたホイートストンブリッジ構成の単純化した回路図である。
【図24B】 電圧源を備えた差動センサ構成の単純化した回路図である。
【図25】 差動センサ回路構成の単純化した回路図である。
【図26】 同期検波器回路の単純化した回路図である。
【図27】 センサシステムにおける静電容量を示す概略図である。
【図28A】 センサを信号処理回路に接続するケーブルを備えた構成の単純化した回路図である。
【図28B】 センサを信号処理回路に接続するケーブルを備えた構成の単純化した回路図である。
【図29】 同期回路の別の実施形態の単純化した回路図である。
【図30】 差動ペアのセンサからの信号を処理する構成の単純化した回路図である。
【図31】 リソグラフィマシンに対するウェーハの位置を定める制御システムの概略図である。
【図32A】 図31の制御システムに使用するセンサ構成の図である。
【図32B】 図31の制御システムに使用するセンサ構成の図である。
【図32C】 投影レンズとウェーハの表面との間の距離と、ウェーハの表面にわたる傾斜値とを決定する測定方法を示す図である。
【発明を実施するための形態】
静電容量センサは、2枚の導電性表面間に作られた均一の電界を使用する。短い距離では、印加された電圧は、表面間の距離に比例する。単一プレートのセンサ(single-plate sensor)は、1つのセンサプレートと導電性ターゲットの表面との間の距離を測定する。

図3は、接地された導電性のターゲット9までの分離距離を測定する1つの静電容量センサプローブ1を示している。AC電流を供給されると、経路15に沿って、センサからセンサ−ターゲットの静電容量(sensor-target capacitance)16を通ってターゲットへ、更に、ターゲットからターゲット−接地のインピーダンス(target-ground impedance)17を通って接地へ、電流が流れる。距離の測定に影響を及ぼす変化又は外的影響からの妨害(disturbance)は、電圧19として、図に示されている。センサがセンサ−ターゲットの静電容量16をどれくらい正確に測定できるかによって、センサからターゲットまでの距離の測定の正確さが決まる。ターゲット−接地のインピーダンス17の静電容量は、センサ−ターゲットの静電容量16を大幅に超えることが多く、ターゲットが適切に接地されていない場合は、100倍を超えることがある。この大きな静電容量は小さなインピーダンス17をもたらすので、センサへの作用は小さい。しかしながら、インピーダンス17の変化は、距離の測定に影響を及ぼし、この作用をできるだけ小さくするのが望ましい。
図5は、薄膜構造を備えた静電容量センサの断面図を示している。導電性感知電極31と、導電性側部ガード電極32が、絶縁膜34上に形成される又は取り付けられている。導電性背部ガード電極35が、絶縁膜34の背側に配置されている。感知電極とガード電極との間のギャップ39は、狭く、一般に10分の数マイクロメータであり、エアギャップであるか、又は絶縁材料で埋められ得る。
図22は、センサシステム300を示している。センサシステム300は、1つ以上のセンサプローブ30と、信号処理システム301と、センサプローブから信号処理システムに信号を伝達する接続システム302とを具備している。信号処理システム301は、センサプローブを駆動する電流又は電圧源回路と、生のセンサ信号を増幅する増幅器/緩衝器回路と、センサガード電極にバイアスをかけてケーブル導体を接続する回路と、プローブから受信した信号を処理して、処理された信号を測定データとして出力する信号処理回路と、システムを較正する回路とを含み得る。接続システム302は、センサを信号処理システムに接続するケーブルを含み得る。
以下に、本出願時の特許請求の範囲に記載された発明を付記する。
[1] ターゲット(9)を露光するために、1本以上のビームを前記ターゲット(9)の表面上に集束させる投影レンズ(104)と、前記ターゲットまでの距離を測定するために、前記投影レンズに対して固定された関係で、マウントされている複数センサ(30)のセットと、を具備するシステムにおいて、前記ターゲット(9)の表面を露光する方法であって、
前記ターゲットを可動テーブル(134)にクランプで留めるステップと、
前記複数センサのうちの1つ以上が前記ターゲットの上に位置を定められる複数の位置に、前記ターゲットを動かすステップと、
前記ターゲットの上に位置を定められている前記複数センサのうちの1つ以上から、信号を受信するステップと、
前記複数センサから受信した信号に基づいて、1つ以上の傾斜修正値(Rx,Ry)を計算するステップと、
前記1つ以上の傾斜修正値に基づいて、露光する前に前記可動テーブルの傾斜を調整するステップと、
前記ターゲットを露光するステップと、
前記複数センサから受信した信号に基づいて、露光中に前記可動テーブルの垂直位置を調整するステップと、
を含む、方法。
[2] 前記複数センサから受信した信号から、露光される前記ターゲットのエリアの表面にわたる高さの変化の高さマップを導き出すステップ、を更に含み、
前記露光中に前記可動テーブルの垂直位置を調整するステップは、前記高さマップに基づく、前記[1]の方法。
[3] 前記露光中に前記可動テーブルの垂直位置を調整するステップは、前記複数センサからの測定値間の補間に基づく、前記[1]の方法。
[4] 前記1つ以上の傾斜修正値(Rx,Ry)に基づいて、前記ターゲットを露光する度に1回、前記可動テーブルの傾斜を調整する、前記[1]乃至[3]の何れか1項の方法。
[5] 前記ターゲットの異なるエリアに対して、複数の組の傾斜修正値(Rx,Ry)を計算し、
前記複数の組の傾斜修正値(Rx,Ry)に基づいて、前記ターゲットを露光する度に2回以上、前記可動テーブルの傾斜を調整する、前記[1]乃至[4]の何れか1項の方法。
[6] 前記1つ以上の傾斜修正値(Rx,Ry)を計算するステップは、幾つかの所定の位置において、前記ターゲットの局部的な勾配を決定することを含む、前記[1]乃至[5]の何れか1項の方法。
[7] 前記所定の位置は、前記ターゲットの外周の近くの等距離間隔の位置を含む、前記[6]の方法。
[8] 前記1つ以上の傾斜修正値は、x方向における修正と、y方向における傾斜の修正とを含み、
前記x方向と前記y方向は、
互いに直角に交わり、
前記ターゲットを露光するために使用される前記1本以上のビームに対して、ほぼ直角に交わる、前記[1]乃至[7]の何れか1項の方法。
[9] ターゲット(9)を露光するリソグラフィシステムであって、
前記リソグラフィシステムは、
前記ターゲットを露光するために、1本以上のビームを前記ターゲット上に投影する、投影レンズ構成(104)と、
可動テーブルにクランプで留められた前記ターゲットを支える、前記可動テーブル(134)と、
各センサが感知位置において前記ターゲットの表面と前記センサとの間の距離を測定する、複数センサ(30)と、
複数センサから信号を受信して、前記複数センサから受信した前記信号に基づいて、1つ以上の傾斜修正値(Rx,Ry)を計算する、処理ユニットと、
を具備しており、
前記可動テーブルは、前記1つ以上の傾斜修正値に基づいて、前記可動テーブルの傾斜を調整する傾斜機械を更に備えており、
前記リソグラフィシステムは、
前記ターゲットを露光する前に、傾斜を調整し、
前記ターゲットの露光中に、投影レンズとウェーハの表面との間の距離の変化に適応させる、
ように更に構成されている、リソグラフィシステム。
[10] 前記投影レンズとウェーハの表面との間の距離の変化に適応させることは、前もって決定された高さマップに基づく、前記[9]のリソグラフィシステム。
[11] 前記投影レンズとウェーハの表面との間の距離の変化に適応させることは、測定値間の補間に基づく、前記[9]のリソグラフィシステム。
[12] 薄膜構造を更に具備する、リソグラフィシステムであって、
前記薄膜構造は、センサ(30)を備えており、
前記センサ(30)は、
第1の絶縁層(34)と、
前記第1の絶縁層の第1の表面上に形成された感知電極(31)を備える第1の導電膜と、
背部ガード電極(35)を備える第2の導電膜と、
を有しており、
前記背部ガード電極は、1つの平面で形成されていて、前記平面に外周部分を備えており、
前記背部ガード電極は、前記第1の絶縁層(34)の第2の表面と、保護層(38)又は第2の絶縁層(43)の第1の表面との上に配置され、
前記背部ガード電極の前記外周部分は、前記感知電極を越えて延在し、側部ガード電極を形成し、
前記側部ガード電極は、前記感知電極を実質的に又は完全に囲んでいる、前記[9]乃至[11]の何れか1項のリソグラフィシステム。
[13] ターゲット(9)までの距離を測定する複数センサ(30)のセットを具備するシステムにおいて、前記ターゲット(9)の表面のトポロジを測定する方法であって、
前記ターゲット上の測定点が前記複数センサの第1のサブセットと一致する第1の位置に、前記ターゲットを動かすステップと、
前記複数センサの前記第1のサブセットのうちの各センサと、前記ターゲットとの間の距離を測定し、第1の測定に基づく1つ以上の値を記憶するステップと、
前記ターゲット上の前記測定点が投影レンズ(104)の下の点及び前記複数センサの第2のサブセットと一致する第2の位置に、前記ターゲットを動かすステップと、
前記複数センサの前記第2のサブセットのうちの各センサと、前記ターゲットとの間の距離を測定し、第2の測定に基づく1つ以上の値を記憶するステップと、
前記第1の測定の記憶された値と、前記第2の測定の記憶された値とに基づいて、前記投影レンズの下の点における前記ターゲットまでの距離の値を計算するステップと、
を含む、方法。
[14] 前記投影レンズ(104)の下の点における前記ターゲット(9)までの距離の値は、前記第1の測定の記憶された値に基づいて、前記第2の測定の記憶された値を補間することによって決定される、前記[13]の方法。
[15] 前記第1の測定に基づいて、前記ターゲット(9)上の前記測定点における前記ターゲット(9)のトポロジを決定するステップ、を更に含む、前記[13]又は[14]の方法。
[16] 前記第1の測定に基づいて、前記ターゲット(9)の前記測定点における前記ターゲット(9)の前記湾曲量を決定するステップ、を更に含む、前記[13]乃至[15]の何れか1項の方法。
[17] 前記投影レンズ(104)の下の点における前記ターゲット(9)までの距離の値は、前記ターゲットの前記測定点における前記ターゲットの前記湾曲量に基づいて、前記第2の測定の記憶された値を補間することによって決定される、前記[16]の方法。
[18] 前記第1の測定の記憶された値と、前記第2の測定の記憶された値とに基づいて、前記ターゲット(9)の傾斜を測定するステップ、を更に含む、前記[13]乃至[17]の何れか1項の方法。
[19] 前記傾斜を決定するために使用される記憶された値は、三角形に配置された少なくとも3つのセンサ(30)の測定値から導き出す、前記[18]の方法。
[20] 前記複数センサ(30)のセットは、複数センサのアレイを含む、前記[13]乃至[19]の何れか1項の方法。
[21] ターゲット(9)を露光するリソグラフィシステムであって、
前記ターゲットを露光するために、1本以上のビームを前記ターゲット上に投影する、投影レンズ構成(104)と、
前記ターゲットを支える可動台であって、少なくとも第1の方向に動くことができる、前記可動台(134)と、
複数センサ(30)であって、
各センサは、感知位置において前記ターゲットと前記センサとの間の距離を測定し、
前記第1の方向に平行し且つ前記第1の方向と反対の方向において、前記投影レンズ構成から間隔を置いて、前記投影レンズ構成と整列する感知位置を有する、少なくとも1つの第1のセンサと、
1つ以上のセンサからなる第1のサブセットであって、前記第1のサブセットのうちの各センサが、前記第1の方向に対して直角に交わる方向において、前記第1のセンサと整列する、前記第1のサブセットと、
1つ以上のセンサからなる第2のサブセットであって、前記第2のサブセットのうちの各センサが、前記第1の方向に対して直角に交わる方向において、前記投影レンズ構成から間隔を置いて、前記投影レンズ構成と整列する、前記第2のサブセットと、
備えている、前記複数センサ(30)と、
前記投影レンズ構成と前記ターゲットとの間の距離に応じて、前記複数センサの第1のサブセットからの測定値と、前記複数センサの第2のサブセットからの測定値とに基づく値を計算する計算ユニットと、
を具備する、リソグラフィシステム。
[22] 薄膜構造を更に具備する、リソグラフィシステムであって、
前記薄膜構造は、センサ(30)を備えており、
前記センサ(30)は、
第1の絶縁層(34)と、
前記第1の絶縁層の第1の表面上に形成された感知電極(31)を備える第1の導電膜と、
背部ガード電極(35)を備える第2の導電膜と、
を有しており、
前記背部ガード電極は、1つの平面で形成されていて、前記平面に外周部分を備えており、
前記背部ガード電極は、前記第1の絶縁層(34)の第2の表面と、保護層(38)又は第2の絶縁層(43)の第1の表面との上に配置され、
前記背部ガード電極の前記外周部分は、前記感知電極を越えて延在し、側部ガード電極を形成し、
前記側部ガード電極は、前記感知電極を実質的に又は完全に囲んでいる、前記[21のリソグラフィシステム。
Claims (13)
- ターゲット(9)を支える可動テーブル(134)と、
前記ターゲット(9)を露光するために、1本以上のビームを前記ターゲット(9)の表面上に集束させる投影レンズ(104)と、
感知位置において前記ターゲットまでの距離を測定するために、前記投影レンズに対して固定された関係でマウントされている少なくとも2つのセンサを備えるセンサ(30)のセットと、
を具備するリソグラフィシステムにおいて、前記ターゲット(9)の表面を露光する方法であって、
前記ターゲットまでの距離を測定するために、前記ターゲットの上に感知位置における前記少なくとも2つのセンサの位置を定めるように、前記可動テーブルと共に前記ターゲットを機械的な走査方向に動かすステップと、
前記ターゲットの上に位置を定められている前記少なくとも2つのセンサから、信号を受信するステップと、
前記少なくとも2つのセンサから受信した信号に基づいて、露光されるエリアの表面にわたる高さの変化の高さマップを導き出すステップと、
前記高さマップにおいて提供されている、露光されるエリアの表面にわたる高さの変化から、1つ以上の傾斜修正値を計算するステップと、
前記ターゲットを露光するステップと、
前記導き出された高さマップにおいて提供されている、露光されるエリアの表面にわたる高さの変化に基づいて、露光中に前記可動テーブルの垂直位置を調整し、前記計算された1つ以上の傾斜修正値に基づいて、前記露光中に前記可動テーブルの傾斜を調整するステップと、
を含む、方法。 - 前記露光中に前記可動テーブルの垂直位置を調整するステップは、前記少なくとも2つのセンサからの測定値間の補間に基づく、請求項1の方法。
- 前記1つ以上の傾斜修正値に基づいて、前記ターゲットを露光する度に1回、前記可動テーブルの傾斜を調整する、請求項1又は2の何れか1項の方法。
- 前記ターゲットの異なるエリアに対して、複数の組の傾斜修正値を計算し、
前記複数の組の傾斜修正値に基づいて、前記ターゲットを露光する度に2回以上、前記可動テーブルの傾斜を調整する、請求項1乃至3の何れか1項の方法。 - 前記1つ以上の傾斜修正値を計算するステップは、幾つかの所定の位置において、前記ターゲットの局部的な勾配を決定することを含む、請求項1乃至4の何れか1項の方法。
- 前記所定の位置は、前記ターゲットの外周の近くの等距離間隔の位置を含む、請求項5の方法。
- 前記1つ以上の傾斜修正値は、x方向における修正と、y方向における傾斜の修正とを含み、
前記x方向と前記y方向は、
互いに直角に交わり、
前記ターゲットを露光するために使用される前記1本以上のビームに対して、ほぼ直角に交わる、請求項1乃至6の何れか1項の方法。 - 前記センサのセットは、前記少なくとも2つのセンサに加えて、更なるセンサを具備しており、
前記少なくとも2つのセンサと、前記更なるセンサは、三角形状に配置され、
前記高さマップを導き出すステップは、前記少なくとも2つのセンサと前記更なるセンサとから受信した信号に基づく、請求項1乃至7の何れか1項に記載の方法。 - ターゲット(9)を露光するリソグラフィシステムであって、
前記リソグラフィシステムは、
前記ターゲットを露光するために、1本以上のビームを前記ターゲット上に投影する投影レンズを備える、投影レンズ構成(104)と、
少なくとも2つのセンサ(30)を備えるセンサのセットであって、各センサが感知位置において前記ターゲットの表面と前記センサとの間の距離を測定し、前記少なくとも2つのセンサが、前記投影レンズに対して固定された関係でマウントされている、センサのセットと、
前記ターゲットを支える可動テーブル(134)であって、前記少なくとも2つのセンサが前記ターゲットまでの距離を測定することを可能にするために、前記ターゲットの上に感知位置における前記少なくとも2つのセンサの位置を定めるように、前記ターゲットを機械的な走査方向に動かすように構成されている、可動テーブル(134)と、
センサから信号を受信して、前記センサから受信した信号に基づいて、露光されるエリアの表面にわたる高さの変化の高さマップを導き出し、前記高さマップにおいて提供されている、露光されるエリアの表面にわたる高さの変化から、1つ以上の傾斜修正値を計算する、処理ユニットと、
を具備しており、
前記可動テーブルは、前記1つ以上の傾斜修正値に基づいて、前記可動テーブルの傾斜を調整する傾斜機械を更に備えており、
前記リソグラフィシステムは、
前記導き出された高さマップにおいて提供されている、露光されるエリアの表面にわたる高さの変化に基づいて、前記ターゲットの露光中に前記可動テーブルの垂直位置を調整し、
前記計算された1つ以上の傾斜修正値に基づいて、前記露光中に前記可動テーブルの傾斜を調整する、
ように更に構成されている、リソグラフィシステム。 - 前記露光中に前記可動テーブルの傾斜を調整することは、前記少なくとも2つのセンサからの測定値間の補間に基づく、請求項9のリソグラフィシステム。
- 前記少なくとも2つのセンサを備える薄膜構造を更に具備する、リソグラフィシステムであって、
各センサ(30)は、
第1の絶縁層(34)と、
前記第1の絶縁層の第1の表面上に形成された感知電極(31)を備える第1の導電膜と、
背部ガード電極(35)を備える第2の導電膜と、
を有しており、
前記背部ガード電極は、1つの平面で形成されていて、前記平面に外周部分を備えており、
前記背部ガード電極は、前記第1の絶縁層(34)の第2の表面と、保護層(38)又は第2の絶縁層(43)の第1の表面との上に配置され、
前記背部ガード電極の前記外周部分は、前記感知電極を越えて延在し、側部ガード電極を形成し、
前記側部ガード電極は、前記感知電極を実質的に又は完全に囲んでいる、請求項9又は10のリソグラフィシステム。 - ターゲットを露光するために、1本以上のビームを前記ターゲットの表面上に集束させる投影レンズと、前記ターゲットまでの距離を測定するために、前記投影レンズに対して固定された関係でマウントされているセンサのセットと、を具備するシステムにおいて、前記ターゲットの表面を露光する方法であって、
前記ターゲットを可動テーブルにクランプで留めるステップと、
前記センサのうちの1つ以上が前記ターゲットの上に位置を定められる複数の位置に、前記ターゲットを動かすステップと、
前記ターゲットの上に位置を定められている前記センサのうちの1つ以上から、信号を受信するステップと、
前記センサから受信した信号に基づいて、露光されるエリアの表面にわたる高さの変化の高さマップを導き出すステップと、
前記高さマップから1つ以上の傾斜修正値を計算するステップと、
前記ターゲットを露光するステップと、
前記導き出された高さマップと前記1つ以上の傾斜修正値に基づいて、前記露光中に前記可動テーブルの垂直位置と傾斜を調整するステップと、
を含む、方法。 - ターゲットを露光するリソグラフィシステムであって、
前記リソグラフィシステムは、
前記ターゲットを露光するために、1本以上のビームを前記ターゲット上に投影する、投影レンズ構成と、
可動テーブルにクランプで留められた前記ターゲットを支える、前記可動テーブルと、
各センサが感知位置において前記ターゲットの表面と前記センサとの間の距離を測定する、複数のセンサと、
前記センサから信号を受信して、前記センサから受信した信号に基づいて露光されるエリアの表面にわたる高さの変化の高さマップを導き出し、前記高さマップから1つ以上の傾斜修正値を計算する、処理ユニットと、
を具備しており、
前記可動テーブルは、前記1つ以上の傾斜修正値に基づいて、前記可動テーブルの傾斜を調整する傾斜機械を更に備えており、
前記リソグラフィシステムは、
前記導き出された高さマップと前記1つ以上の傾斜修正値に基づいて、前記ターゲットの露光中に前記可動テーブルの垂直位置と傾斜を調整する、
ように更に構成されている、リソグラフィシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US29141109P | 2009-12-31 | 2009-12-31 | |
| US61/291,411 | 2009-12-31 | ||
| PCT/EP2010/070891 WO2011080311A1 (en) | 2009-12-31 | 2010-12-29 | Exposure method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013516753A JP2013516753A (ja) | 2013-05-13 |
| JP2013516753A5 JP2013516753A5 (ja) | 2014-02-20 |
| JP5781541B2 true JP5781541B2 (ja) | 2015-09-24 |
Family
ID=43640437
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012546447A Active JP5599899B2 (ja) | 2009-12-31 | 2010-12-29 | 差動ペアを備えた静電容量感知システム |
| JP2012546446A Active JP5784630B2 (ja) | 2009-12-31 | 2010-12-29 | 静電容量感知システム |
| JP2012546448A Expired - Fee Related JP5559359B2 (ja) | 2009-12-31 | 2010-12-29 | 統合されたセンサシステム |
| JP2012546449A Active JP5781541B2 (ja) | 2009-12-31 | 2010-12-29 | 露光方法 |
| JP2014243368A Active JP5917665B2 (ja) | 2009-12-31 | 2014-12-01 | 静電容量感知システム |
Family Applications Before (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012546447A Active JP5599899B2 (ja) | 2009-12-31 | 2010-12-29 | 差動ペアを備えた静電容量感知システム |
| JP2012546446A Active JP5784630B2 (ja) | 2009-12-31 | 2010-12-29 | 静電容量感知システム |
| JP2012546448A Expired - Fee Related JP5559359B2 (ja) | 2009-12-31 | 2010-12-29 | 統合されたセンサシステム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014243368A Active JP5917665B2 (ja) | 2009-12-31 | 2014-12-01 | 静電容量感知システム |
Country Status (8)
| Country | Link |
|---|---|
| US (5) | US8513959B2 (ja) |
| EP (4) | EP2519858A1 (ja) |
| JP (5) | JP5599899B2 (ja) |
| KR (5) | KR101676831B1 (ja) |
| CN (6) | CN102782585A (ja) |
| RU (4) | RU2573447C2 (ja) |
| TW (5) | TW201142242A (ja) |
| WO (4) | WO2011080311A1 (ja) |
Families Citing this family (93)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8151995B2 (en) * | 2008-02-04 | 2012-04-10 | Texas Instruments Incorporated | Methods and apparatus to prevent mold compound feeder jams in systems to package integrated circuits |
| US8513959B2 (en) * | 2009-12-31 | 2013-08-20 | Mapper Lithography Ip B.V. | Integrated sensor system |
| US8688393B2 (en) * | 2010-07-29 | 2014-04-01 | Medtronic, Inc. | Techniques for approximating a difference between two capacitances |
| GB201016556D0 (en) * | 2010-10-01 | 2010-11-17 | Senergy Technology Ltd | Methods for providing for correcting data and associated apparatus |
| JP5353991B2 (ja) * | 2010-11-30 | 2013-11-27 | 株式会社日本自動車部品総合研究所 | 静電容量式乗員検知装置 |
| KR20120080923A (ko) * | 2011-01-10 | 2012-07-18 | 삼성전자주식회사 | 반도체 패키지 및 이의 제조 방법 |
| JP2014513869A (ja) * | 2011-04-22 | 2014-06-05 | マッパー・リソグラフィー・アイピー・ビー.ブイ. | ウェーハのようなターゲットを処理するためのリソグラフィシステム、及びウェーハのようなターゲットを処理するためのリソグラフィシステムを動作させる方法 |
| KR102236200B1 (ko) * | 2011-06-30 | 2021-04-06 | 에이에스엠엘 네델란즈 비.브이. | 용량성 측정 시스템을 위한 능동 실드 |
| US8933712B2 (en) | 2012-01-31 | 2015-01-13 | Medtronic, Inc. | Servo techniques for approximation of differential capacitance of a sensor |
| JP5909822B2 (ja) * | 2012-02-27 | 2016-04-27 | アルプス・グリーンデバイス株式会社 | 電流センサ及びその作製方法 |
| US8961228B2 (en) * | 2012-02-29 | 2015-02-24 | Tyco Electronics Corporation | Electrical connector having shielded differential pairs |
| WO2013132064A2 (en) | 2012-03-08 | 2013-09-12 | Mapper Lithography Ip B.V. | Charged particle lithography system with alignment sensor and beam measurement sensor |
| WO2013132081A2 (en) | 2012-03-08 | 2013-09-12 | Mapper Lithography Ip B.V. | Lithography system and method for processing a target, such as a wafer |
| DE102012205122B4 (de) * | 2012-03-29 | 2024-06-20 | Robert Bosch Gmbh | Kapazitives Ortungsgerät |
| JP5934546B2 (ja) * | 2012-03-29 | 2016-06-15 | 株式会社Screenホールディングス | 描画装置および描画方法 |
| JP5981270B2 (ja) * | 2012-08-28 | 2016-08-31 | 日置電機株式会社 | 電圧測定用センサおよび電圧測定装置 |
| JP5981271B2 (ja) * | 2012-08-28 | 2016-08-31 | 日置電機株式会社 | 電圧測定用センサおよび電圧測定装置 |
| US9692875B2 (en) * | 2012-08-31 | 2017-06-27 | Analog Devices, Inc. | Grip detection and capacitive gesture system for mobile devices |
| TWI464371B (zh) * | 2012-10-22 | 2014-12-11 | Pixart Imaging Inc | 微機電裝置與製作方法 |
| CN109187656B (zh) * | 2013-03-15 | 2021-11-16 | 伊利昂科技有限公司 | 测量物质的电学性能的装置和方法 |
| TW201504631A (zh) * | 2013-07-23 | 2015-02-01 | Mpi Corp | 光電元件檢測用之高頻探針卡 |
| KR102124913B1 (ko) * | 2013-09-07 | 2020-06-22 | 에이에스엠엘 네델란즈 비.브이. | 타겟 프로세싱 유닛 |
| US9739816B2 (en) * | 2013-11-27 | 2017-08-22 | Analog Devices, Inc. | Capacitive sensor with differential shield |
| US9952266B2 (en) | 2014-02-14 | 2018-04-24 | Witricity Corporation | Object detection for wireless energy transfer systems |
| JP6452140B2 (ja) * | 2014-02-19 | 2019-01-16 | 本田技研工業株式会社 | 距離センサ及び計測方法 |
| KR102224824B1 (ko) * | 2014-05-30 | 2021-03-08 | 삼성전자 주식회사 | Ito 전극패턴을 포함하는 전자장치 및 그 전자장치의 제조방법 |
| US10139869B2 (en) | 2014-07-23 | 2018-11-27 | Analog Devices, Inc. | Capacitive sensors for grip sensing and finger tracking |
| US9811218B2 (en) | 2014-08-16 | 2017-11-07 | Synaptics Incorporated | Location based object classification |
| WO2016073144A1 (en) | 2014-11-03 | 2016-05-12 | Illinois Tool Works Inc. | Transmissive front-face heater for vehicle sensor system |
| UA114724C2 (uk) * | 2014-12-23 | 2017-07-25 | Микола Іванович Єпіфанов | Автономний модульний пристрій для підвищення безпеки транспортного засобу і кластерний пристрій для його реалізації |
| US10132651B2 (en) * | 2015-03-23 | 2018-11-20 | Iee International Electronics & Engineering S.A. | Capacitive sensing system with hardware diagnostics concept for detection of sensor interruption |
| KR101679204B1 (ko) * | 2015-04-22 | 2016-11-25 | 에이디반도체(주) | 감지신호 전달 장치 및 이를 이용한 정전용량 센서 장치 |
| CN105185283B (zh) * | 2015-10-23 | 2017-12-08 | 京东方科技集团股份有限公司 | 检测装置、基板架、检测基板架上基板位置的方法 |
| DE102016202456B4 (de) | 2016-02-17 | 2017-10-26 | Olympus Winter & Ibe Gmbh | Chirurgievorrichtung mit Funktionsvorrichtung |
| JP6650325B2 (ja) * | 2016-04-01 | 2020-02-19 | アルプスアルパイン株式会社 | 入力装置 |
| US9852833B1 (en) * | 2016-06-28 | 2017-12-26 | Alcatel-Lucent Usa Inc. | Magnetization alignment in a thin-film device |
| US9725302B1 (en) * | 2016-08-25 | 2017-08-08 | Applied Materials, Inc. | Wafer processing equipment having exposable sensing layers |
| JP6775800B2 (ja) * | 2016-10-25 | 2020-10-28 | 島根県 | 静電容量型センサ |
| CN108007327A (zh) * | 2016-10-31 | 2018-05-08 | 深圳指瑞威科技有限公司 | 电容式距离传感器 |
| FR3060733B1 (fr) * | 2016-12-16 | 2019-01-25 | Fogale Nanotech | Dispositif et procede de detection de l'approche et/ou de contact, et de l'appui d'un objet, relativement a une surface de detection |
| FR3062205B1 (fr) * | 2017-01-23 | 2020-01-31 | Fogale Nanotech | Dispositif capacitif de detection d'un objet electriquement flottant |
| EP3379204B1 (en) * | 2017-03-22 | 2021-02-17 | Knowles Electronics, LLC | Arrangement to calibrate a capacitive sensor interface |
| TWI613578B (zh) * | 2017-04-10 | 2018-02-01 | 友達光電股份有限公司 | 觸控電極陣列和觸控顯示裝置 |
| CN110536851B (zh) * | 2017-04-21 | 2021-01-22 | 惠普发展公司,有限责任合伙企业 | 传感器校准 |
| CN107204325B (zh) * | 2017-05-25 | 2023-06-02 | 成都线易科技有限责任公司 | 电容器阵列及制造方法 |
| JP6718622B2 (ja) | 2017-05-26 | 2020-07-08 | 株式会社京岡 | 隙間センサおよび隙間測定方法 |
| JP7094513B2 (ja) * | 2017-06-19 | 2022-07-04 | ユニパルス株式会社 | 厚み測定装置 |
| KR101879285B1 (ko) * | 2017-08-01 | 2018-07-17 | 송청담 | 고감도 정전 센서 회로 |
| GB2566053A (en) * | 2017-08-31 | 2019-03-06 | Weston Aerospace Ltd | Sensor and method of manufacturing same |
| JP7058409B2 (ja) * | 2017-09-06 | 2022-04-22 | 島根県 | 設置自由度の高い静電容量型センサ |
| JP7048043B2 (ja) * | 2017-12-26 | 2022-04-05 | 島根県 | 非接触測定システム |
| KR102394081B1 (ko) * | 2018-02-27 | 2022-05-04 | 삼성전자주식회사 | 감지 회로를 이용한 벤딩 정보에 기반하여 동작 모드를 변경하기 위한 방법, 전자 장치 및 저장 매체 |
| CN110221594B (zh) * | 2018-03-01 | 2024-07-12 | 苏州宝时得电动工具有限公司 | 电容传感器及自动行走设备 |
| RU2688734C1 (ru) * | 2018-04-06 | 2019-05-22 | Общество с ограниченной ответственностью "СБ "Марит" (ООО "СБ "Марит") | Емкостное средство обнаружения |
| CN112136022A (zh) * | 2018-05-16 | 2020-12-25 | 山特维克材料技术公司 | 具有传感器布置结构的金属管结构 |
| CN108562216B (zh) * | 2018-05-30 | 2020-07-10 | 华中科技大学 | 一种基于变压器初级远距离传输的电容位移传感装置 |
| CN108413856B (zh) * | 2018-05-30 | 2020-07-10 | 华中科技大学 | 一种基于双变压器远距离隔离传输的电容位移传感装置 |
| EP3594639B1 (de) * | 2018-07-13 | 2022-09-28 | Tecan Trading Ag | Vorrichtung und verfahren zur kapazitiven füllstandsmessung in flüssigkeitsbehältern |
| EP3608624B1 (de) * | 2018-08-06 | 2022-06-29 | Hexagon Technology Center GmbH | Kapazitiver distanzsensor |
| US11342210B2 (en) | 2018-09-04 | 2022-05-24 | Applied Materials, Inc. | Method and apparatus for measuring wafer movement and placement using vibration data |
| US10794681B2 (en) * | 2018-09-04 | 2020-10-06 | Applied Materials, Inc. | Long range capacitive gap measurement in a wafer form sensor system |
| US10847393B2 (en) * | 2018-09-04 | 2020-11-24 | Applied Materials, Inc. | Method and apparatus for measuring process kit centering |
| US11521872B2 (en) * | 2018-09-04 | 2022-12-06 | Applied Materials, Inc. | Method and apparatus for measuring erosion and calibrating position for a moving process kit |
| US11404296B2 (en) * | 2018-09-04 | 2022-08-02 | Applied Materials, Inc. | Method and apparatus for measuring placement of a substrate on a heater pedestal |
| CN113039633B (zh) * | 2018-11-15 | 2022-08-16 | 科磊股份有限公司 | 具有用于晶片检查的柔性电子器件的多传感器铺砖式相机 |
| US10724964B1 (en) | 2019-04-10 | 2020-07-28 | Kla-Tencor Corporation | Multi-sensor tiled camera with flexible electronics for wafer inspection |
| DK3654532T3 (da) * | 2018-11-16 | 2022-06-07 | Bently Nevada Llc | Proksimitetsregistreringssystem med komponentkompatibilitetstestning |
| CN109581511B (zh) * | 2018-11-23 | 2020-06-16 | 辽宁大学 | 一种基于感应原理的非接触式煤岩带电监测传感器标定系统及方法 |
| CN113167564B (zh) * | 2018-12-11 | 2023-06-27 | 日商乐华股份有限公司 | 静电电容传感器 |
| US10809048B2 (en) * | 2019-01-08 | 2020-10-20 | Formfactor Beaverton, Inc. | Probe systems and methods for calibrating capacitive height sensing measurements |
| US10837803B2 (en) * | 2019-04-12 | 2020-11-17 | Kla Corporation | Inspection system with grounded capacitive sample proximity sensor |
| CN110044253A (zh) * | 2019-05-27 | 2019-07-23 | 中国工程物理研究院电子工程研究所 | 一种微马达及内嵌式角度测量装置 |
| RU2722167C1 (ru) * | 2019-08-11 | 2020-05-27 | Сергей Викторович Тюрин | Способ бесконтактного измерения смещения токоведущего проводника от геометрического центра кабельной жилы |
| US20220301793A1 (en) * | 2019-08-13 | 2022-09-22 | Saint-Gobain Glass France | Composite panel with a sensor assembly on both sides |
| RU2717904C1 (ru) * | 2019-09-13 | 2020-03-26 | Общество С Ограниченной Ответственностью "Конструкторское Бюро "Дорс" (Ооо "Кб "Дорс") | Способ измерения при помощи дифференциального датчика |
| CN110631465B (zh) * | 2019-09-16 | 2021-04-16 | 太原理工大学 | 基于电容原理差动式测量的积灰结渣在线监测装置及方法 |
| CN110779965B (zh) * | 2019-10-22 | 2022-08-02 | 电子科技大学 | 一种大面积表面损伤柔性探测装置 |
| CN112744779B (zh) * | 2019-10-30 | 2024-02-23 | 台湾积体电路制造股份有限公司 | 微机电系统及其制造方法 |
| US11274037B2 (en) * | 2019-10-30 | 2022-03-15 | Taiwan Semiconductor Manufacturing Co., Ltd. | Dual micro-electro mechanical system and manufacturing method thereof |
| RU197920U1 (ru) * | 2020-01-28 | 2020-06-05 | Акционерное общество "ПК Альматек" | Печатная плата устройства для предъявления электрических импульсов при транслингвальной нейростимуляции |
| US20230136092A1 (en) * | 2020-04-24 | 2023-05-04 | Agco Corporation | Agricultural machines comprising capacitive sensors, and related methods and apparatus |
| US11646707B2 (en) * | 2020-05-21 | 2023-05-09 | Novatek Microelectronics Corp. | Analog front end with pulse width modulation current compensation |
| US11574530B2 (en) | 2020-06-04 | 2023-02-07 | Ecolink Intelligent Technology, Inc. | Electronic sensor with flexible sensing device |
| CN112325980B (zh) * | 2020-10-30 | 2024-03-01 | 中国航空工业集团公司西安航空计算技术研究所 | 自平衡交流电桥电容式油量传感器采集装置及方法 |
| US11275312B1 (en) * | 2020-11-30 | 2022-03-15 | Waymo Llc | Systems and methods for verifying photomask cleanliness |
| US20240058531A1 (en) * | 2020-12-16 | 2024-02-22 | Sanofi | Electrode System, Electronic System, Drug Delivery Device, and a Method of Manufacturing an Electronic System |
| CN115267345A (zh) * | 2021-04-29 | 2022-11-01 | 财团法人工业技术研究院 | 具校正功能的微机电感测装置 |
| TWI790857B (zh) * | 2021-12-15 | 2023-01-21 | 財團法人工業技術研究院 | 差動式電容裝置與差動式電容校準方法 |
| CN114526144B (zh) * | 2022-02-25 | 2023-03-21 | 潍柴动力股份有限公司 | 一种NOx传感器安装位置识别方法、装置、车辆及介质 |
| EP4258320A1 (en) * | 2022-04-08 | 2023-10-11 | ASML Netherlands B.V. | Sensor substrate, apparatus, and method |
| EP4310885A1 (en) | 2022-07-21 | 2024-01-24 | ASML Netherlands B.V. | Electron-optical apparatus and method of obtaining topographical information about a sample surface |
| TWI822621B (zh) * | 2023-03-30 | 2023-11-11 | 力晶積成電子製造股份有限公司 | 檢測裝置 |
| TWI850116B (zh) * | 2023-09-21 | 2024-07-21 | 晶豪科技股份有限公司 | 電容量測電路 |
Family Cites Families (75)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3522528A (en) * | 1968-02-27 | 1970-08-04 | Trw Inc | Noncontacting capacitance distance gauge having a servosystem and a position sensor |
| SU932208A1 (ru) * | 1978-07-17 | 1982-05-30 | Ордена Трудового Красного Знамени Предприятие П/Я А-1742 | Устройство дл измерени рассто ний до провод щей поверхности |
| GB2131176B (en) | 1982-10-07 | 1986-02-19 | Rolls Royce | Method of manufacturing a capacitance distance measuring probe |
| US4539835A (en) | 1983-10-28 | 1985-09-10 | Control Data Corporation | Calibration apparatus for capacitance height gauges |
| US4538069A (en) * | 1983-10-28 | 1985-08-27 | Control Data Corporation | Capacitance height gage applied in reticle position detection system for electron beam lithography apparatus |
| JPS615317A (ja) * | 1984-06-18 | 1986-01-11 | Omron Tateisi Electronics Co | 自動焦点合わせ装置 |
| SU1195182A1 (ru) * | 1984-07-26 | 1985-11-30 | Институт Электродинамики Ан Усср | Емкостный измеритель перемещений |
| US4766368A (en) * | 1986-09-30 | 1988-08-23 | Cox Harold A | Capacitive sensor |
| JP2518301B2 (ja) * | 1987-09-11 | 1996-07-24 | 株式会社ニコン | 間隔測定装置 |
| AT393040B (de) | 1988-03-03 | 1991-07-25 | Setec Messgeraete Gmbh | Kapazitiver naeherungsgeber |
| JPH01285801A (ja) * | 1988-05-12 | 1989-11-16 | Koko Res Kk | 近接距離センサー及び形状判別装置 |
| JP2807827B2 (ja) * | 1989-07-03 | 1998-10-08 | 直之 大纒 | 静電容量型距離計 |
| US5337353A (en) * | 1992-04-01 | 1994-08-09 | At&T Bell Laboratories | Capacitive proximity sensors |
| JP2516666Y2 (ja) * | 1992-10-23 | 1996-11-06 | 株式会社ミツトヨ | 静電容量式変位測定装置 |
| JPH0682506U (ja) * | 1993-04-28 | 1994-11-25 | 兼子興産株式会社 | 非接触厚さ計 |
| US5539323A (en) * | 1993-05-07 | 1996-07-23 | Brooks Automation, Inc. | Sensor for articles such as wafers on end effector |
| JP3520881B2 (ja) * | 1995-07-03 | 2004-04-19 | 株式会社ニコン | 露光装置 |
| JP3328710B2 (ja) | 1995-08-23 | 2002-09-30 | オムロン株式会社 | 半導体静電容量型センサ |
| WO1997029391A1 (en) | 1996-02-09 | 1997-08-14 | Scandmec Ab | Device for sensing presence of an electrically conducting object |
| JPH09280806A (ja) * | 1996-04-09 | 1997-10-31 | Nissan Motor Co Ltd | 静電容量式変位計 |
| US5844486A (en) * | 1997-01-02 | 1998-12-01 | Advanced Safety Concepts, Inc. | Integral capacitive sensor array |
| US6075375A (en) * | 1997-06-11 | 2000-06-13 | Applied Materials, Inc. | Apparatus for wafer detection |
| JP3356043B2 (ja) * | 1997-12-26 | 2002-12-09 | 三菱電機株式会社 | レーザ加工装置用距離検出器 |
| US5990473A (en) * | 1998-02-04 | 1999-11-23 | Sandia Corporation | Apparatus and method for sensing motion in a microelectro-mechanical system |
| DE19812626A1 (de) | 1998-03-23 | 1999-09-30 | Bayerische Motoren Werke Ag | Verfahren zur kapazitiven Objekterkennung bei Fahrzeugen |
| JP3246726B2 (ja) * | 1998-11-13 | 2002-01-15 | 株式会社ミツトヨ | 静電容量式変位検出器及び測定装置 |
| US6249130B1 (en) * | 1998-12-21 | 2001-06-19 | Agrichem, Inc. | Shielded flat-plate proximity/dielectric properties sensor |
| AU3604900A (en) * | 1999-02-24 | 2000-09-14 | Advanced Safety Concepts, Inc. | Capacitive sensors for vehicular environments |
| JP2001091205A (ja) * | 1999-07-22 | 2001-04-06 | Sumitomo Metal Ind Ltd | 物体搭載装置 |
| JP4872989B2 (ja) * | 1999-07-22 | 2012-02-08 | 東京エレクトロン株式会社 | 静電容量型センサ部品、物体搭載体、半導体製造装置および液晶表示素子製造装置 |
| GB0000619D0 (en) * | 2000-01-13 | 2000-03-01 | British Aerospace | Accelerometer |
| US6633050B1 (en) * | 2000-08-15 | 2003-10-14 | Asml Holding Nv. | Virtual gauging system for use in lithographic processing |
| US7561270B2 (en) * | 2000-08-24 | 2009-07-14 | Asml Netherlands B.V. | Lithographic apparatus, device manufacturing method and device manufactured thereby |
| EP1231515B1 (en) * | 2001-02-08 | 2008-11-05 | ASML Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| US6859260B2 (en) | 2001-04-25 | 2005-02-22 | Asml Holding N.V. | Method and system for improving focus accuracy in a lithography system |
| JP3980387B2 (ja) * | 2002-03-20 | 2007-09-26 | 富士通株式会社 | 容量検出型センサ及びその製造方法 |
| US20040207395A1 (en) * | 2002-04-08 | 2004-10-21 | Moshe Sarfaty | Eddy current-capacitance sensor for conducting film characterization |
| US7109493B2 (en) | 2002-06-15 | 2006-09-19 | Anthony Derek Eastham | Particle beam generator |
| US7148704B2 (en) * | 2002-10-31 | 2006-12-12 | Harald Philipp | Charge transfer capacitive position sensor |
| FI115109B (fi) * | 2003-01-22 | 2005-02-28 | Nokia Corp | Tunnistusjärjestely ja tunnistusjärjestelyn käsittävä matkaviestin |
| JP4067053B2 (ja) * | 2003-03-13 | 2008-03-26 | キヤノン株式会社 | 静電容量センサ式計測装置 |
| JP4054693B2 (ja) * | 2003-02-27 | 2008-02-27 | 株式会社ミツトヨ | 静電容量式変位測定器 |
| US7114399B2 (en) * | 2003-03-19 | 2006-10-03 | Ade Corporation | Shaped non-contact capacitive displacement sensors for measuring shaped targets |
| JP4029770B2 (ja) * | 2003-05-15 | 2008-01-09 | オムロン株式会社 | 厚み検出センサ |
| JP4042973B2 (ja) * | 2003-11-07 | 2008-02-06 | 株式会社日本自動車部品総合研究所 | 非接触式車両用接近体検出装置 |
| JP2005156492A (ja) * | 2003-11-28 | 2005-06-16 | Agilent Technol Inc | 可動機構、測定装置、静電容量式距離測定装置、および、位置決め装置 |
| JP2005175173A (ja) | 2003-12-10 | 2005-06-30 | Nikon Corp | 露光方法及び装置、並びにデバイス製造方法 |
| US20050134865A1 (en) * | 2003-12-17 | 2005-06-23 | Asml Netherlands B.V. | Method for determining a map, device manufacturing method, and lithographic apparatus |
| JP2005183744A (ja) * | 2003-12-22 | 2005-07-07 | Nikon Corp | 露光装置及びデバイス製造方法 |
| DE602005019689D1 (de) | 2004-01-20 | 2010-04-15 | Zeiss Carl Smt Ag | Belichtungsvorrichtung und messeinrichtung für eine projektionslinse |
| US20070229791A1 (en) * | 2004-03-16 | 2007-10-04 | Nikon Corporation | Step Measuring Device and Apparatus, and Exposure Method and Apparatus |
| US6989679B2 (en) | 2004-06-03 | 2006-01-24 | General Electric Company | Non-contact capacitive sensor and cable with dual layer active shield |
| JP4356570B2 (ja) * | 2004-09-16 | 2009-11-04 | 沖電気工業株式会社 | 静電容量型距離センサ |
| KR20070083492A (ko) * | 2004-12-02 | 2007-08-24 | 가부시키가이샤 니콘 | 노광 장치, 노광 방법 및 디바이스 제조 방법 |
| KR20060082223A (ko) * | 2005-01-11 | 2006-07-18 | 삼성전자주식회사 | 화상인식 반도체 모듈 |
| US7342641B2 (en) * | 2005-02-22 | 2008-03-11 | Nikon Corporation | Autofocus methods and devices for lithography |
| US7395717B2 (en) * | 2006-02-10 | 2008-07-08 | Milliken & Company | Flexible capacitive sensor |
| US7208960B1 (en) * | 2006-02-10 | 2007-04-24 | Milliken & Company | Printed capacitive sensor |
| GB2450261A (en) * | 2006-02-21 | 2008-12-17 | Cyberoptics Semiconductor Inc | Capacitive distance sensing in semiconductor processing tools |
| CN101360992B (zh) * | 2006-02-27 | 2013-02-20 | 爱德华兹生命科学公司 | 使用挠性电路技术形成参考电极通道的方法和装置 |
| WO2007104540A2 (de) * | 2006-03-13 | 2007-09-20 | Ident Technology Ag | Kapazitive sensoreinrichtung |
| JP4828316B2 (ja) * | 2006-06-13 | 2011-11-30 | 三菱電機株式会社 | レーザ加工機用のギャップ検出装置及びレーザ加工システム並びにレーザ加工機用のギャップ検出方法 |
| RU2338997C2 (ru) * | 2006-07-13 | 2008-11-20 | Федеральное государственное унитарное предприятие "Центральный научно-исследовательский институт "Электроприбор" | Способ измерения зазора между электродами и подвижной массой микромеханического устройства и устройство для его реализации |
| RU2318183C1 (ru) * | 2006-08-09 | 2008-02-27 | Общество С Ограниченной Ответственностью "Диамех 2000" | Устройство для измерения воздушного зазора |
| US20080079920A1 (en) * | 2006-09-29 | 2008-04-03 | Heiko Hommen | Wafer exposure device and method |
| JP2008111758A (ja) * | 2006-10-31 | 2008-05-15 | Yamatake Corp | 容量式電磁流量計 |
| JP4609731B2 (ja) * | 2006-10-31 | 2011-01-12 | 株式会社デンソー | 静電容量式乗員検知センサ |
| NL1036009A1 (nl) * | 2007-10-05 | 2009-04-07 | Asml Netherlands Bv | An Immersion Lithography Apparatus. |
| JP2009109208A (ja) * | 2007-10-26 | 2009-05-21 | Ono Sokki Co Ltd | 測定装置および測定方法 |
| NL1036069A1 (nl) * | 2007-10-30 | 2009-05-07 | Asml Netherlands Bv | An Immersion Lithography Apparatus. |
| NL1036547A1 (nl) * | 2008-02-20 | 2009-08-24 | Asml Holding Nv | Gas gauge compatible with vacuum environments. |
| NL1036516A1 (nl) * | 2008-03-05 | 2009-09-08 | Asml Netherlands Bv | Lithographic apparatus and method. |
| NL1036709A1 (nl) * | 2008-04-24 | 2009-10-27 | Asml Netherlands Bv | Lithographic apparatus and a method of operating the apparatus. |
| US8872771B2 (en) * | 2009-07-07 | 2014-10-28 | Apple Inc. | Touch sensing device having conductive nodes |
| US8513959B2 (en) * | 2009-12-31 | 2013-08-20 | Mapper Lithography Ip B.V. | Integrated sensor system |
-
2010
- 2010-12-23 US US12/977,404 patent/US8513959B2/en active Active
- 2010-12-23 US US12/977,288 patent/US8638109B2/en active Active
- 2010-12-23 US US12/977,346 patent/US20110261344A1/en not_active Abandoned
- 2010-12-23 US US12/977,240 patent/US8570055B2/en active Active
- 2010-12-29 JP JP2012546447A patent/JP5599899B2/ja active Active
- 2010-12-29 WO PCT/EP2010/070891 patent/WO2011080311A1/en active Application Filing
- 2010-12-29 KR KR1020127020000A patent/KR101676831B1/ko active IP Right Grant
- 2010-12-29 JP JP2012546446A patent/JP5784630B2/ja active Active
- 2010-12-29 JP JP2012546448A patent/JP5559359B2/ja not_active Expired - Fee Related
- 2010-12-29 WO PCT/EP2010/070889 patent/WO2011080309A1/en active Application Filing
- 2010-12-29 CN CN2010800650601A patent/CN102782585A/zh active Pending
- 2010-12-29 CN CN201080065050.8A patent/CN102782444B/zh active Active
- 2010-12-29 CN CN201511036369.9A patent/CN108151773A/zh not_active Withdrawn
- 2010-12-29 WO PCT/EP2010/070890 patent/WO2011080310A1/en active Application Filing
- 2010-12-29 WO PCT/EP2010/070888 patent/WO2011080308A1/en active Application Filing
- 2010-12-29 KR KR1020127020224A patent/KR20120102148A/ko not_active Application Discontinuation
- 2010-12-29 CN CN2010800650584A patent/CN102782584A/zh active Pending
- 2010-12-29 RU RU2012132637/28A patent/RU2573447C2/ru active
- 2010-12-29 KR KR1020127020227A patent/KR101436947B1/ko active IP Right Grant
- 2010-12-29 EP EP10803098A patent/EP2519858A1/en not_active Withdrawn
- 2010-12-29 JP JP2012546449A patent/JP5781541B2/ja active Active
- 2010-12-29 KR KR1020147032749A patent/KR101577717B1/ko active IP Right Grant
- 2010-12-29 RU RU2012132638/28A patent/RU2559993C2/ru active
- 2010-12-29 KR KR1020127019998A patent/KR101454727B1/ko active IP Right Grant
- 2010-12-29 RU RU2012132634/28A patent/RU2012132634A/ru not_active Application Discontinuation
- 2010-12-29 RU RU2012132633/28A patent/RU2532575C2/ru active
- 2010-12-29 CN CN201610064253.4A patent/CN105716630B/zh active Active
- 2010-12-29 CN CN201080063434.6A patent/CN102753931B/zh active Active
- 2010-12-29 EP EP10798361.1A patent/EP2519801B1/en active Active
- 2010-12-29 EP EP10807329.7A patent/EP2519859B1/en active Active
- 2010-12-29 EP EP10798144.1A patent/EP2519800B1/en active Active
- 2010-12-30 TW TW099146840A patent/TW201142242A/zh unknown
- 2010-12-30 TW TW099146838A patent/TWI453549B/zh not_active IP Right Cessation
- 2010-12-30 TW TW099146839A patent/TWI512265B/zh active
- 2010-12-30 TW TW099146837A patent/TWI460398B/zh active
- 2010-12-30 TW TW103134728A patent/TW201508243A/zh unknown
-
2013
- 2013-10-28 US US14/064,255 patent/US8841920B2/en active Active
-
2014
- 2014-12-01 JP JP2014243368A patent/JP5917665B2/ja active Active
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5917665B2 (ja) | 静電容量感知システム | |
| NL2004055C2 (en) | Method for measuring target surface topology and lithography system. | |
| NL2004051C2 (en) | Capacitive sensor. | |
| NL2004054C2 (en) | Lithography system with capacitive sensing system. | |
| NL2004052C2 (en) | Capacitive sensing system. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131226 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131226 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140911 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141007 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150616 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150715 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5781541 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D02 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |