JP5657120B2 - 制御装置一体型回転電機及びその組立分解方法 - Google Patents
制御装置一体型回転電機及びその組立分解方法 Download PDFInfo
- Publication number
- JP5657120B2 JP5657120B2 JP2013527767A JP2013527767A JP5657120B2 JP 5657120 B2 JP5657120 B2 JP 5657120B2 JP 2013527767 A JP2013527767 A JP 2013527767A JP 2013527767 A JP2013527767 A JP 2013527767A JP 5657120 B2 JP5657120 B2 JP 5657120B2
- Authority
- JP
- Japan
- Prior art keywords
- assembly
- brush
- control unit
- rotor
- unit assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/04—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for rectification
- H02K11/049—Rectifiers associated with stationary parts, e.g. stator cores
- H02K11/05—Rectifiers associated with casings, enclosures or brackets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K15/00—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines
- H02K15/0006—Disassembling, repairing or modifying dynamo-electric machines
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K15/00—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines
- H02K15/02—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines of stator or rotor bodies
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K15/00—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines
- H02K15/14—Casings; Enclosures; Supports
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K19/00—Synchronous motors or generators
- H02K19/16—Synchronous generators
- H02K19/36—Structural association of synchronous generators with auxiliary electric devices influencing the characteristic of the generator or controlling the generator, e.g. with impedances or switches
- H02K19/365—Structural association of synchronous generators with auxiliary electric devices influencing the characteristic of the generator or controlling the generator, e.g. with impedances or switches with a voltage regulator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/06—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with position sensing devices
- H02K29/12—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with position sensing devices using detecting coils using the machine windings as detecting coil
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/52—Fastening salient pole windings or connections thereto
- H02K3/521—Fastening salient pole windings or connections thereto applicable to stators only
- H02K3/522—Fastening salient pole windings or connections thereto applicable to stators only for generally annular cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/10—Casings or enclosures characterised by the shape, form or construction thereof with arrangements for protection from ingress, e.g. water or fingers
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/14—Means for supporting or protecting brushes or brush holders
- H02K5/141—Means for supporting or protecting brushes or brush holders for cooperation with slip-rings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/22—Auxiliary parts of casings not covered by groups H02K5/06-H02K5/20, e.g. shaped to form connection boxes or terminal boxes
- H02K5/225—Terminal boxes or connection arrangements
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49002—Electrical device making
- Y10T29/49009—Dynamoelectric machine
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Manufacturing & Machinery (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Motor Or Generator Frames (AREA)
- Manufacture Of Motors, Generators (AREA)
- Motor Or Generator Current Collectors (AREA)
Description
この特許文献1には、回転子へ通電するブラシとこのブラシを保持するブラシホルダ、制御回路で制御されることにより回転子の通電制御を行う回転子通電制御部、及び制御回路で制御されることにより固定子の通電制御を行うパワー回路部を回転電機本体に一体的に搭載された制御装置一体型回転電機が開示されている。
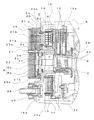
以下この発明の実施の形態1を図1〜図9及び図18により説明する。図1は制御装置一体型回転電機の全体構造を例示する断面図、図2は固定子の通電制御を行うパワー回路部と回転子の通電制御を行う回転子通電制御部とがヒートシンクに搭載されたパワー部組立体を、中継基板が搭載される前の状態で例示する上面図、図3は固定子の通電制御を行うパワー回路部と回転子の通電制御を行う回転子通電制御部とがヒートシンクに搭載されたパワー部組立体を、中継基板が搭載された後の状態で例示する上面図、図4は固定子側(フロント側)から見たリヤブラケット内の配線部材、ブラシホルダの位置を例示した図、図5は図1の制御装置一体型回転電機をリヤ側から見た図、図6は制御部組立体Aとパワー部組立体Bとブラシ部組立体Cと固定子3とが組み立てられる前の状態を示すリヤ側半製品組立体Dの組み立て説明図、図7はリヤ側半製品組立体Dとフロント側半製品組立体Eとが組み立てられる前の状態を示すリヤ側半製品組立体Dとフロント側半製品組立体Eとの組み立て説明図、図8制御装置一体型回転電機1の組立工程を示す図、図9は制御装置一体型回転電機1の分解工程を示す図、図18は制御装置一体型回転電機内の概略電気回路を例示する図である。
リヤ側半製品組立体Dは、リヤブラケット5に、制御部組立体Aとパワー部組立体Bとブラシ部組立体Cと固定子3とを組み付けることにより構成されている。
中継基板17は、パワー回路13のパワー回路信号端子13aおよび回転子通電制御部14の回転子通電制御部信号端子14aをFコネクタ20に接続する電気回路を搭載した基板である。
制御基板19上の制御回路からの制御信号が、Mコネクタ21a、Fコネクタ20、および中継基板17を介して、パワー回路信号端子13aへ供給されることにより、パワー回路13は、制御基板19上の制御回路からの制御信号に基づいて三相固定子巻線3aの通電制御を行う。
制御基板19上の制御回路からの制御信号が、Mコネクタ21a、Fコネクタ20、および中継基板17を介して、回転子通電制御部信号端子14aへ供給されることにより、回転子通電制御部14は、制御基板19上の制御回路からの制御信号に基づいて回転子巻線(界磁巻線)2aの通電制御を行う。
ブラシ押圧バネ12bは、フロント側半製品組立体Eの回転軸9のリヤ側(反負荷側)の先端部におけるスリップリング11に、ブラシ12を弾性的に押圧するための圧縮バネである。
パワー部ケース16内は樹脂16aで封止され電子モジュール18が構成される。
センサーステータ6aの信号線はモールドケース21に図示しないインサート成形されているターミナルと溶接または半田付けされて制御基板19と接続される。
モールドケース21には、中継基板17に設けられえたFコネクタ20を接続するためのMコネクタ21aが一体成形されており、Mコネクタ21aのターミナル21bはモールドケース21にアウトサートまたはインサート成形されている。
Fコネクタ20にはパッキン20aが設けられ、Fコネクタ20は防水構造となっている。モールドケース21にセンサーステータ6a、磁極位置検出センサー側カバー23、及び制御基板19を装着後、モールドケース21内には樹脂21cが充填される。
工程a1では、制御部組立体Aの磁極位置検出センサー6のセンサーステータ6aを、リヤブラケット5のボス部5aに嵌合した後、ボルトやネジ等の締付子Asによって、制御部組立体Aの制御部ケース(モールドケース)21をリヤブラケット5に締め付ける。(図6および図7を参照)
センサーステータ6aを、リヤブラケット5のボス部5aに嵌合した後、締付子Asによって、制御部ケース(モールドケース)21をリヤブラケット5に締め付けることによって、センサーステータ6aは正確な位置に固定されることになる。
また、センサーステータ6aを、リヤブラケット5のボス部5aに嵌合した後、締付子Asによって、制御部ケース(モールドケース)21をリヤブラケット5に締め付けることによって、磁極位置検出センサー側カバー23の円筒部23aのブラシ拘束ピン貫通孔24と、制御部ケース(モールドケース)21のブラシ拘束ピン貫通孔24と、リヤブラケット5のボス部5aのブラシ拘束ピン貫通孔24とが一連のブラシ拘束ピン挿通孔24となる。
工程a2では、工程a1でリヤブラケット5に組み付けられた制御部組立体AのMコネクタ部(制御部組立体側A側の雄型コネクタ)21aに、パワー部組立体BのFコネクタ(パワー部組立体B側の雌型コネクタ)20を差込接続した後、ボルトやネジ等の締付子Bs(図4を参照)によって、パワー部組立体Bをリヤブラケット5に締め付ける。(図6および図7を参照)。
工程a1でリヤブラケット5に組み付けられた制御部組立体AのMコネクタ部(制御部組立体側A側の雄型コネクタ)21aに、パワー部組立体BのFコネクタ(パワー部組立体B側の雌型コネクタ)20を差込接続した後、ボルトやネジ等の締付子Bs(図4を参照)によって、パワー部組立体Bをリヤブラケット5に締め付けることによって、制御部組立体AのMコネクタ部(制御部組立体側A側の雄型コネクタ)21aと、パワー部組立体BのFコネクタ(パワー部組立体B側の雌型コネクタ)20とが確実に接続されると共に、パワー部組立体BのFコネクタ(パワー部組立体B側の雌型コネクタ)20の外周と、制御部組立体AのMコネクタ部(制御部組立体側A側の雄型コネクタ)21aのFコネクタ20の外周に対応する内周との間の防水がパッキン20aにより行われる。
工程a3では、ブラシ部組立体Cは、ボルトやネジ等の締付子Cs(図4を参照)によって、ブラシ部組立体Cを、工程a1および工程a2で制御部組立体Aおよびパワー部組立体Bが組み付けられたリヤブラケット5に締め付ける。(図6および図7を参照)
工程a3で、工程a1および工程a2で制御部組立体Aおよびパワー部組立体Bが組み付けられたリヤブラケット5に、ブラシ部組立体Cを組み付けることにより、ブラシ部組立体Cのブラシ拘束ピン貫通孔24は、磁極位置検出センサー側カバー23の円筒部23aのブラシ拘束ピン貫通孔24と、制御部ケース(モールドケース)21のブラシ拘束ピン貫通孔24と、リヤブラケット5のボス部5aのブラシ拘束ピン貫通孔24と一連のブラシ拘束ピン挿通孔24となる。
前述の工程a1〜工程a4により、リヤ側半製品組立体(反負荷側半製品組立体)Dが出来上がる。
工程da1では、締付子Asを緩めて取り外し、次いで、制御部組立体Aを、リヤブラケット5から取り外す。制御部組立体Aを、リヤブラケット5から取り外すと、磁極位置検出センサー6のセンサーステータ6aも制御部組立体Aと共に取り外されるので、リヤブラケット5のボス部5aのリヤ側開口部に、回転軸9のリヤ側先端部に取り付けられているセンサーロータ6bが露出する。
工程da3では、フロント側半製品組立体Eのリヤ側半製品組立体Dからの取り外しに伴って、フロント側半製品組立体Eの回転軸9上のスリップリング11およびリヤ側軸受8も一緒にリヤ側半製品組立体Dから取り外される。この場合、ブラシ12はブラシ押圧バネ12bによって回転軸9の方向に付勢されていると共にブラシ拘束ピン24pも一連のブラシ拘束ピン挿通孔24から抜き取られている(工程a6)ので、センサーロータ6bが回転軸9のリヤ側先端部から取り外されることなく回転軸9上に取り付けられたままである場合にはリヤ側軸受8とセンサーロータ6bとの間のリング状の溝にブラシ12に嵌り込み、フロント側半製品組立体Eのリヤ側半製品組立体Dからの取り外しが困難になるが、工程da2でセンサーロータ6bが回転軸9のリヤ側先端部から取り外されているので、ブラシ12はどこにも嵌り込むことがなく、従ってフロント側半製品組立体Eは、リヤ側半製品組立体Dから容易にスムースに取り外すことができる。
これに対し、本実施の形態1では、制御部組立体Aを先にリヤブラケット5に取付けて、その後にパワー部組立体Bをリヤブラケット5に取付けるので、パワー部組立体BのFコネクタ20は、先に取付けられている制御部組立体AのMコネクタ21aを基準として取付けられ、その後に、パワー部組立体Bを、ボルト等の位置的に融通のきく締付子Bsで、リヤブラケット5に取付けるので、パワー部組立部BのFコネクタ20と制御部組立体AMコネクタ21aとの間でコネクタの偏心取付けを無くすことができ、防水性が良くなる。また、センサーステータ6aとリヤブラケット5の嵌め合いクリアランスを小さくできるので検出角度精度が向上する。
また、パワー回路部13Inv及び回転子通電制御部(界磁回路)14は、リヤブラケット5に取り付けられているので、静電気による破損を防げる。
以下本発明の実施の形態2を図10によって説明する。図10は制御装置一体型回転電機の要部を例示する断面図である。ただし、実施の形態1の構成要素と類似要素には同一符号を付し、基本的な構成は実施の形態1と同様であるので説明を省く。
以下本発明の実施の形態3を図11によって説明する。図11は制御装置一体型回転電機の要部を例示する断面図である。ただし、実施の形態1の構成要素と類似要素には同一符号を付し、基本的な構成は実施の形態1と同様であるので説明を省く。
防水栓27、Oリング28、パッキン29により、磁極位置検出センサー6の防水が確実にでき、防水性が向上できる。また防水栓27は着脱可能であり、修理などで分解しても組立可能である。
また、パッキン29はゴム製でブラシ拘束ピンが空けた孔をゴムの反力で塞がる構造としたので、パッキンの形状を簡易にでき、コスト低減できる。
以下本発明の実施の形態4を図12により説明する。図12は要部を拡大して例示する断面図である。
制御部ケース(モールドケース)21に配置された磁極位置検出センサー側カバー23の円筒部23aに設けられた貫通孔24に、ゴム製の防水栓27が設けられ、防水栓27の中心には有底の止まり穴27aが設けられている。
以下本発明の実施の形態5を図13により説明する。図13は制御装置一体型回転電機の要部を例示する断面図である。ただし、実施の形態1の構成要素と類似要素には同一符号を付し、基本的な構成は実施の形態1と同様であるので説明を省く。
以下本発明の実施の形態6を図14により説明する。図14の(a)は制御装置一体型回転電機の全体構造を例示する断面図、(b)は(a)のF部を拡大して例示する断面図、(c)は(b)においてリヤ側から見た図である。ただし、実施の形態1の構成要素と類似要素には同符号を付す。基本的な構成は実施の形態1と同様であるので説明を省く。
十字状のスリット31aの中心部にブラシ拘束ピンを貫通すると十字状のスリット31aの中央部に孔が開き、ブラシ拘束ピンを抜くと、開いていた孔が防水蓋31自体の反力で塞がる。
なお、前述の実施の形態5におけるパッキン29も、本実施の形態6の防水蓋31と同等の形状にしてもよい。
本発明の実施の形態7を図15及び図16によって説明する。図15は制御装置一体型回転電機の要部を例示する断面図、図16は図15における磁極位置検出センサーのリヤ側から見た図である。ただし、実施の形態1の構成要素と類似要素には同一符号を付し、基本的な構成は実施の形態1と同様であるので説明を省く。
磁極位置検出センサーの角度検出精度を向上させるためにセンサーの径を大きくすることができ、かつ生産性を向上できる。
以下本発明の実施の形態8を図17によって説明する。図17は制御装置一体型回転電機における磁極位置検出センサーのリヤ側から見た図である。
A 制御部組立体、 As 締付子、 B パワー部組立体、
Bs 締付子、 C ブラシ部組立体、 Cs 締付子、
D リヤ側半製品組立体(反負荷側半製品組立体)、 DEs 締付子、
E フロント側半製品組立体(負荷側半製品組立体)、
1 制御装置一体型回転電機、
2 回転子、 2a 界磁巻線(回転子巻線)、2f 冷却用ファン、
3 固定子、 3a 三相固定子巻線(電機子巻線)、
4 フロントブラケット(負荷側ブラケット)、
5 リヤブラケット(反負荷側ブラケット)、 5a ボス部、
5b リヤブラケットエンドプレート部、 5c コネクタ貫通孔、
6 磁極位置検出センサー、 6a センサーステータ、
6b センサーロータ、 6c 切欠け、
7 フロント側軸受(負荷側軸受)、
8 リヤ側軸受(反負荷側軸受)、
9 回転軸、 10 プーリ、 11 スリップリング、
12 ブラシ、 12a ブラシホルダ、 12b ブラシ押圧バネ
13 パワー回路、 13a パワー回路信号端子、
13Inv パワー回路部、 14 回転子通電制御部(界磁回路)、
14a 回転子通電制御部信号端子、 15 ヒートシンク、
16 パワー部ケース、 16a 樹脂(樹脂モールド)、
【0072】
17 中継基板、 18 電子モジュール、 19 制御基板、
20 Fコネクタ(パワー部組立体B側の雌型コネクタ)、
20a パッキン、 21 制御部ケース(モールドケース)、
21a Mコネクタ部(制御部組立体側A側の雄型コネクタ)、
21b ターミナル(制御部組立体側ターミナル)、
21c 樹脂(モールド)、
22 配線部材、 22a インサート部品、 22b インサート部品、
23 磁極位置検出センサー側カバー、 23a 円筒部、
24 貫通孔(一連のブラシ拘束ピン挿通孔)、
24a 一連のブラシ拘束ピン挿通孔のリヤ側開口(反負荷側開口)、
24p ブラシ拘束ピン、 26 ブラシ脱落防止部、 27 防水栓、
27a 止まり穴、 28 Oリング、 28a 溝、
29 パッキン、 30リヤカバー(反負荷側カバー)、 31 防水蓋、
31a 十字状スリット、 100 回転電機本体。
20 Fコネクタ(パワー部組立体B側の雌型コネクタ)、
20a パッキン、 21 制御部ケース(モールドケース)、
21a Mコネクタ部(制御部組立体側A側の雄型コネクタ)、
21b ターミナル(制御部組立体側ターミナル)、
21c 樹脂(モールド)、
22 配線部材、 22a インサート部品、 22b インサート部品、
23 磁極位置検出センサー側カバー、 23a 円筒部、
24 一連のブラシ拘束ピン捜通孔、
24a 一連のブラシ拘束ピン捜通孔のリヤ側開口(反負荷側開口)、
24p ブラシ拘束ピン、 26 ブラシ脱落防止部、 27 防水栓、
27a 止まり穴、 28 Oリング、 28a 溝、
29 パッキン、 30リヤカバー(反負荷側カバー)、 31 防水蓋、
31a 十字状スリット、 100 回転電機本体。
Claims (15)
- リヤブラケットとフロントブラケットとにより保持され固定子と同心状に位置する回転子、この回転子へ通電するブラシとこのブラシを保持するブラシホルダとの組立体であるブラシ部組立体、制御されることにより回転子の通電制御を行う回転子通電制御部及び制御されることにより固定子の通電制御を行うパワー回路部の少なくとも一方がパワー部ケースに取り付けられて構成されたパワー部組立体、及び前記回転子通電制御部及び前記パワー回路部へ制御信号を出力して前記回転子通電制御部及び前記パワー回路部の前記制御を行う制御回路を搭載した制御基板が制御部ケースに取り付けられて構成された制御部組立体を備え、
前記制御部組立体が最もリヤ側に、前記ブラシ部組立体が最もフロント側に、前記パワー部組立体が前記制御部組立体と前記ブラシ部組立体との間に、それぞれ位置して、前記制御部組立体と前記ブラシ部組立体と前記パワー部組立体とが前記リヤブラケットに組み込まれて、前記リヤブラケットと前記制御部組立体と前記パワー部組立体と前記ブラシ部組立体とが一体化されたリヤ側半製品組立体が構成され、
前記回転子と前記フロントブラケットとからなるフロント側半製品組立体と前記リヤ側半製品組立体とを組み付けて構成された制御装置一体型回転電機であって、
前記制御部組立体のリヤ側端面から前記ブラシに至る一連のブラシ拘束ピン挿通孔が設けられ、前記一連のブラシ拘束ピン挿通孔を塞ぐ防水栓が、前記一連のブラシ拘束ピン挿通孔のリヤ側端から挿入されている
ことを特徴とする制御装置一体型回転電機。 - 請求項1に記載の制御装置一体型回転電機において、前記防水栓の中心部に、前記防水栓のリヤ側端面に開口する有底の止まり穴が設けられていることを特徴とする制御装置一体型回転電機。
- リヤブラケットとフロントブラケットとにより保持され固定子と同心状に位置する回転子、この回転子へ通電するブラシとこのブラシを保持するブラシホルダとの組立体であるブラシ部組立体、制御されることにより回転子の通電制御を行う回転子通電制御部及び制御されることにより固定子の通電制御を行うパワー回路部の少なくとも一方がパワー部ケースに取り付けられて構成されたパワー部組立体、及び前記回転子通電制御部及び前記パワー回路部へ制御信号を出力して前記回転子通電制御部及び前記パワー回路部の前記制御を行う制御回路を搭載した制御基板が制御部ケースに取り付けられて構成された制御部組立体を備え、
前記制御部組立体が最もリヤ側に、前記ブラシ部組立体が最もフロント側に、前記パワー部組立体が前記制御部組立体と前記ブラシ部組立体との間に、それぞれ位置して、前記制御部組立体と前記ブラシ部組立体と前記パワー部組立体とが前記リヤブラケットに組み込まれて、前記リヤブラケットと前記制御部組立体と前記パワー部組立体と前記ブラシ部組立体とが一体化されたリヤ側半製品組立体が構成され、
前記回転子と前記フロントブラケットとからなるフロント側半製品組立体と前記リヤ側半製品組立体とを組み付けて構成された制御装置一体型回転電機であって、
前記制御部組立体のリヤ側端面から前記ブラシに至る一連のブラシ拘束ピン挿通孔が設けられ、
ブラシ拘束ピンを貫通すると孔が開き、当該貫通したブラシ拘束ピンを抜くと前記開いた孔が塞がる防水蓋が、前記一連のブラシ拘束ピン挿通孔のリヤ側端に取り付けられている
ことを特徴とする制御装置一体型回転電機。 - リヤブラケットとフロントブラケットとにより保持され固定子と同心状に位置する回転子、この回転子へ通電するブラシとこのブラシを保持するブラシホルダとの組立体であるブラシ部組立体、制御されることにより回転子の通電制御を行う回転子通電制御部及び制御されることにより固定子の通電制御を行うパワー回路部の少なくとも一方がパワー部ケースに取り付けられて構成されたパワー部組立体、及び前記回転子通電制御部及び前記パワー回路部へ制御信号を出力して前記回転子通電制御部及び前記パワー回路部の前記制御を行う制御回路を搭載した制御基板が制御部ケースに取り付けられて構成された制御部組立体を備え、
前記制御部組立体が最もリヤ側に、前記ブラシ部組立体が最もフロント側に、前記パワー部組立体が前記制御部組立体と前記ブラシ部組立体との間に、それぞれ位置して、前記制御部組立体と前記ブラシ部組立体と前記パワー部組立体とが前記リヤブラケットに組み込まれて、前記リヤブラケットと前記制御部組立体と前記パワー部組立体と前記ブラシ部組立体とが一体化されたリヤ側半製品組立体が構成され、
前記回転子と前記フロントブラケットとからなるフロント側半製品組立体と前記リヤ側半製品組立体とを組み付けて構成された制御装置一体型回転電機であって、
前記制御部組立体のリヤ側端面から前記ブラシに至る一連のブラシ拘束ピン挿通孔が設けられ、
前記制御部組立体の前記制御基板が樹脂でモールドされ、
前記制御部ケースの後部にシール付リヤカバーが貼り付けられ、
前記シール付リヤカバーは、前記モールドのリヤ側面の全面を覆うと共に前記一連のブラシ拘束ピン挿通孔のリヤ側開口を覆い、前記制御装置一体型回転電機の分解時に剥がされ、前記制御装置一体型回転電機の組立て時に前記制御部ケースの後部に貼り付けられる
ことを特徴とする制御装置一体型回転電機。 - 請求項1から4の何れか一に記載の制御装置一体型回転電機において、前記リヤブラケットに前記パワー部組立体が囲繞するボス部が設けられ、前記ボス部に、前記一連のブラシ拘束ピン挿通孔の一部である貫通孔が設けられていることを特徴とする制御装置一体型回転電機。
- 請求項5に記載の制御装置一体型回転電機において、前記回転子の回転軸のフロント側端部が、前記フロントブラケットに取り付けられたフロント側軸受で支承され、前記回転軸のリヤ側端部が、前記ボス部の内周に取り付けられたリヤ側軸受で支承されていることを特徴とする制御装置一体型回転電機。
- 請求項6に記載の制御装置一体型回転電機において、磁極位置検出センサーのセンサーロータが、前記回転軸の前記リヤ側軸受よりリヤ側の端部に取り付けられていることを特徴とする制御装置一体型回転電機。
- 請求項7に記載の制御装置一体型回転電機において、前記センサーロータと前記リヤ側軸受との間にブラシ脱落防止部が設けられていることを特徴とする制御装置一体型回転電機。
- 請求項7または請求項8に記載の制御装置一体型回転電機において、前記磁極位置検出センサーのセンサーステータが、前記制御部ケースに取り付けられていることを特徴とする制御装置一体型回転電機。
- 請求項9に記載の制御装置一体型回転電機において、前記センサーステータの外周面に、前記一連のブラシ拘束ピン挿通孔の一部を形成する切欠けまたは貫通孔が設けられていることを特徴とする制御装置一体型回転電機。
- 請求項10に記載の制御装置一体型回転電機において、前記切欠けまたは貫通孔が、前記センサーロータを中心とした対称位置に複数個設けられていることを特徴とする制御装置一体型回転電機。
- 請求項1から11の何れか一に記載の制御回路一体型回転電機において、前記リヤブラケットに、前記ブラシホルダが前記パワー部組立体より後付けされていることを特徴とする制御装置一体型回転電機。
- 請求項1、請求項3、及び請求項4の何れか一に記載の制御装置一体型回転電機の組立方法であって、
前記リヤ側半製品組立体における前記一連のブラシ拘束ピン挿通孔にブラシ拘束ピンを前記制御部組立体のリヤ側端面から挿入して前記ブラシが前記ブラシホルダから前記回転子の回転軸側へ飛び出さないように前記ブラシを前記ブラシ拘束ピンのフロント側端部で拘束した状態で、前記フロント側半製品組立体に前記リヤ側半製品組立体を組み付けた後に、前記一連のブラシ拘束ピン挿通孔から前記ブラシ拘束ピンを抜き取ることを特徴とする制御装置一体型回転電機の組立方法。 - 請求項13に記載の制御装置一体型回転電機の組立方法において、前記リヤブラケットに、前記パワー部組立体が前記制御部組立体より後付けされることを特徴とする制御装置一体型回転電機の組立方法。
- 請求項7に記載の制御装置一体型回転電機の分解方法であって、
前記制御装置一体型回転電機から前記制御部組立体を取り外した後に、前記回転軸のリヤ側端部から前記センサーロータを取り外し、
次いで、前記フロント側半製品組立体が、前記制御部組立体が取り外された前記リヤ側半製品組立体から取り外すことを特徴とする制御装置一体型回転電機の分解方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2011/068043 WO2013021444A1 (ja) | 2011-08-08 | 2011-08-08 | 制御装置一体型回転電機及びその組立分解方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP5657120B2 true JP5657120B2 (ja) | 2015-01-21 |
| JPWO2013021444A1 JPWO2013021444A1 (ja) | 2015-03-05 |
Family
ID=47667997
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013527767A Active JP5657120B2 (ja) | 2011-08-08 | 2011-08-08 | 制御装置一体型回転電機及びその組立分解方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9667124B2 (ja) |
| EP (1) | EP2744083B1 (ja) |
| JP (1) | JP5657120B2 (ja) |
| CN (1) | CN103797690B (ja) |
| WO (1) | WO2013021444A1 (ja) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5456912B2 (ja) * | 2010-12-13 | 2014-04-02 | 三菱電機株式会社 | 制御装置一体型回転電機 |
| CN103650302B (zh) * | 2011-11-09 | 2016-09-28 | 三菱电机株式会社 | 旋转电机 |
| JP5721794B2 (ja) * | 2013-08-26 | 2015-05-20 | 三菱電機株式会社 | 制御装置一体型回転電機 |
| JP2015065713A (ja) * | 2013-09-24 | 2015-04-09 | 三菱電機株式会社 | 回転電機 |
| JP6390089B2 (ja) * | 2013-11-01 | 2018-09-19 | 日産自動車株式会社 | インバータ一体型モータ |
| US9871333B2 (en) * | 2014-06-18 | 2018-01-16 | Mitsbushi Electric Corporation | AC generator slip ring device |
| CN104716786B (zh) * | 2015-04-08 | 2017-03-15 | 新动力电机(荆州)有限公司 | 大电流永磁同步电机多驱动控制集成装置 |
| US10786894B2 (en) * | 2015-10-14 | 2020-09-29 | Black & Decker Inc. | Brushless motor system for power tools |
| FR3047851A1 (fr) * | 2016-02-15 | 2017-08-18 | Valeo Equip Electr Moteur | Ensemble electronique d'une machine electrique tournante |
| WO2017156516A1 (en) * | 2016-03-11 | 2017-09-14 | Itt Manufacturing Enterprises Llc | Motor assembly for driving a pump or rotary device, having power plane with multi-layer power and control printed circuit board assembly |
| CN107453541A (zh) * | 2016-06-01 | 2017-12-08 | 德昌电机(深圳)有限公司 | 电机及具有该电机的风扇 |
| FR3052610B1 (fr) | 2016-06-14 | 2021-12-03 | Valeo Equip Electr Moteur | Machine electrique tournante a electronique de puissance amelioree |
| TWI658680B (zh) * | 2017-11-30 | 2019-05-01 | 財團法人工業技術研究院 | 驅控器與電動機相連結之一體式電力連結裝置 |
| WO2020086095A1 (en) * | 2018-10-26 | 2020-04-30 | Borgwarner Inc. | Rotating machine and method of using the same |
| DE102018218529A1 (de) * | 2018-10-30 | 2020-04-30 | Zf Friedrichshafen Ag | Gehäusedeckel für eine elektrische Maschine, elektrische Maschine und Montageverfahren |
| DE102018218527A1 (de) * | 2018-10-30 | 2020-04-30 | Zf Friedrichshafen Ag | Gehäusedeckel für eine elektrische Maschine und Verfahren zum Herstellen eines Gehäusedeckels |
| DE102019102318A1 (de) * | 2019-01-30 | 2020-07-30 | Nidec Gpm Gmbh | Pumpe aufweisend einen Elektromotor mit Steckeranbindung in Form eines Zwischenringes |
| JP7460330B2 (ja) * | 2019-04-25 | 2024-04-02 | ファナック株式会社 | 電動機、および電動機の製造方法 |
| JP7326892B2 (ja) * | 2019-06-06 | 2023-08-16 | スズキ株式会社 | 回転機、ブラシユニット及びブラシユニットの取付方法 |
| US11770045B2 (en) * | 2020-01-06 | 2023-09-26 | Kiryl Nikolaevich CHYKEYUK | Rotary connector module for device forming quasi three-dimentional image |
| US11451156B2 (en) | 2020-01-21 | 2022-09-20 | Itt Manufacturing Enterprises Llc | Overvoltage clamp for a matrix converter |
| JP7019780B1 (ja) | 2020-10-27 | 2022-02-15 | 三菱電機株式会社 | 回転電機 |
| JP7068433B1 (ja) | 2020-12-16 | 2022-05-16 | 三菱電機株式会社 | 制御装置一体型回転電機 |
| EP4037150A3 (en) | 2021-02-02 | 2022-09-14 | Black & Decker, Inc. | Compact brushless motor including in-line terminals |
| CN113922600B (zh) * | 2021-10-08 | 2023-09-26 | 沧州华海风电设备科技技术开发有限公司 | 一种在线校环集尘集电系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0486075U (ja) * | 1990-11-28 | 1992-07-27 | ||
| JP2010239727A (ja) * | 2009-03-31 | 2010-10-21 | Hitachi Automotive Systems Ltd | 車両用交流発電機及び車両用発電電動装置 |
| JP2010279137A (ja) * | 2009-05-28 | 2010-12-09 | Mitsubishi Electric Corp | 回転電機 |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3219860A (en) * | 1961-09-21 | 1965-11-23 | Gen Motors Corp | Brush rigging for dynamoelectric machines |
| JPS626830Y2 (ja) * | 1980-06-10 | 1987-02-17 | ||
| JPH0448134Y2 (ja) * | 1987-05-29 | 1992-11-12 | ||
| JPS63310349A (ja) * | 1987-06-10 | 1988-12-19 | Hitachi Ltd | 車両用交流発電機 |
| JPH027767U (ja) * | 1988-06-21 | 1990-01-18 | ||
| JPH027767A (ja) * | 1988-06-27 | 1990-01-11 | Seiko Epson Corp | 画像入力装置 |
| JPH0755034B2 (ja) * | 1990-09-27 | 1995-06-07 | 三菱電機株式会社 | 車両用交流発電機のブラシ保持器 |
| EP0778663B1 (en) * | 1993-12-07 | 2000-04-12 | Denso Corporation | Alternating current generator for motor vehicles |
| JPH07322552A (ja) * | 1994-05-25 | 1995-12-08 | Mabuchi Motor Co Ltd | 小型モータ |
| US6215211B1 (en) * | 1999-05-10 | 2001-04-10 | Visteon Global Technologies, Inc. | Alternator bearing sleeve, brush holder, and cap system |
| JP3983445B2 (ja) * | 2000-03-15 | 2007-09-26 | 三菱電機株式会社 | 交流発電機 |
| JP4427896B2 (ja) * | 2000-03-17 | 2010-03-10 | 株式会社デンソー | 車両用交流発電機 |
| JP3855762B2 (ja) * | 2001-03-29 | 2006-12-13 | 株式会社デンソー | 車両用交流発電機 |
| JP3661655B2 (ja) * | 2002-02-27 | 2005-06-15 | 株式会社デンソー | 回転電機のブラシ組体の組付けに用いるブラシサポート治具及びそれを用いたブラシ組体の組付け方法 |
| KR100571636B1 (ko) * | 2002-03-04 | 2006-04-17 | 미츠비시덴키 가부시키가이샤 | 차량용 교류 전기기계 |
| JP3783667B2 (ja) * | 2002-08-06 | 2006-06-07 | 三菱電機株式会社 | 回転電機およびその回転位置センサーの位置決め方法および位置決め装置 |
| US7570488B2 (en) * | 2004-09-21 | 2009-08-04 | Mitsubishi Denki Kabushiki Kaisha | Alternator rectifier |
| JP4275614B2 (ja) * | 2004-12-10 | 2009-06-10 | 三菱電機株式会社 | 車両用回転電機 |
| JP4391407B2 (ja) * | 2004-12-20 | 2009-12-24 | 三菱電機株式会社 | 制御装置一体型回転電機 |
| JP4926409B2 (ja) * | 2005-03-17 | 2012-05-09 | 三菱電機株式会社 | 交流発電機 |
| JP4278643B2 (ja) * | 2005-08-30 | 2009-06-17 | 三菱電機株式会社 | 車両用回転電機 |
| EP3041117B1 (en) * | 2005-12-16 | 2018-01-31 | Mitsubishi Electric Corporation | Electric motor generator |
| JP2007209078A (ja) * | 2006-01-31 | 2007-08-16 | Mitsubishi Electric Corp | 車両用交流発電機 |
| JP4402057B2 (ja) * | 2006-02-21 | 2010-01-20 | 三菱電機株式会社 | 制御装置一体型回転電機 |
| WO2008142778A1 (ja) * | 2007-05-22 | 2008-11-27 | Mitsubishi Electric Corporation | 車両用交流発電機 |
| JP4493700B2 (ja) * | 2008-05-19 | 2010-06-30 | 三菱電機株式会社 | 制御装置一体型回転電機 |
| JP4628460B2 (ja) * | 2008-10-22 | 2011-02-09 | 三菱電機株式会社 | 回転電機、及びその製造方法 |
| JP2010136499A (ja) * | 2008-12-03 | 2010-06-17 | Mitsubishi Electric Corp | 制御装置一体型回転電機 |
| JP4754009B2 (ja) * | 2009-06-04 | 2011-08-24 | 三菱電機株式会社 | 車両用回転電機 |
-
2011
- 2011-08-08 US US14/122,734 patent/US9667124B2/en active Active
- 2011-08-08 JP JP2013527767A patent/JP5657120B2/ja active Active
- 2011-08-08 EP EP11870717.3A patent/EP2744083B1/en active Active
- 2011-08-08 WO PCT/JP2011/068043 patent/WO2013021444A1/ja active Application Filing
- 2011-08-08 CN CN201180072726.0A patent/CN103797690B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0486075U (ja) * | 1990-11-28 | 1992-07-27 | ||
| JP2010239727A (ja) * | 2009-03-31 | 2010-10-21 | Hitachi Automotive Systems Ltd | 車両用交流発電機及び車両用発電電動装置 |
| JP2010279137A (ja) * | 2009-05-28 | 2010-12-09 | Mitsubishi Electric Corp | 回転電機 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9667124B2 (en) | 2017-05-30 |
| EP2744083A4 (en) | 2016-07-20 |
| CN103797690A (zh) | 2014-05-14 |
| EP2744083A1 (en) | 2014-06-18 |
| JPWO2013021444A1 (ja) | 2015-03-05 |
| US20140091682A1 (en) | 2014-04-03 |
| EP2744083B1 (en) | 2019-10-30 |
| CN103797690B (zh) | 2017-03-29 |
| WO2013021444A1 (ja) | 2013-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5657120B2 (ja) | 制御装置一体型回転電機及びその組立分解方法 | |
| JP4895704B2 (ja) | 電動パワーステアリング用モータ及びレゾルバ装置 | |
| JP4502912B2 (ja) | 回転電機およびその製造方法 | |
| JP3816353B2 (ja) | 電動パワーステアリング装置用モータ | |
| JP5927836B2 (ja) | 駆動装置 | |
| US7909130B2 (en) | Electric power steering apparatus | |
| US10630141B2 (en) | Driving apparatus | |
| JP6702212B2 (ja) | 駆動装置 | |
| JPWO2006109714A1 (ja) | モータ装置 | |
| CN106458249A (zh) | 一体型电动助力转向装置及其制造方法 | |
| JP2005229721A (ja) | 電動パワーステアリング装置用モータ | |
| US20170305457A1 (en) | Control unit and electric power steering device employing control unit | |
| JP2011239542A (ja) | 車両用制御装置一体型回転電機 | |
| WO2016046898A1 (ja) | 車両用電子制御装置及びモータ駆動装置 | |
| JP2009118614A (ja) | ブラシレスモータ | |
| JP2014110712A (ja) | 制御装置一体型回転電機 | |
| JP5523044B2 (ja) | 駆動制御装置、およびモータユニット | |
| US20190296602A1 (en) | Drive device | |
| CN102655357A (zh) | 马达和用于电动转向装置的马达 | |
| JP5449498B1 (ja) | 回転電機 | |
| JP3881351B2 (ja) | 電動パワーステアリング装置用モータ | |
| US10326340B2 (en) | Driving apparatus | |
| JP5868531B1 (ja) | 車両用回転電機 | |
| JP2010041871A (ja) | ブラシレスモータ | |
| KR102485482B1 (ko) | 차량용 시동 발전기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141028 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141125 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5657120 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |