JP5544042B2 - ジェスチャを使用してレーザトラッカを制御する方法及び装置 - Google Patents
ジェスチャを使用してレーザトラッカを制御する方法及び装置 Download PDFInfo
- Publication number
- JP5544042B2 JP5544042B2 JP2013506293A JP2013506293A JP5544042B2 JP 5544042 B2 JP5544042 B2 JP 5544042B2 JP 2013506293 A JP2013506293 A JP 2013506293A JP 2013506293 A JP2013506293 A JP 2013506293A JP 5544042 B2 JP5544042 B2 JP 5544042B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- laser tracker
- retroreflector
- axis
- tracker
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 130
- 238000001514 detection method Methods 0.000 claims description 14
- 238000004891 communication Methods 0.000 claims description 13
- 230000008859 change Effects 0.000 claims description 11
- 238000012545 processing Methods 0.000 claims description 10
- 238000003384 imaging method Methods 0.000 claims description 8
- 230000003213 activating effect Effects 0.000 claims description 7
- 230000004044 response Effects 0.000 claims description 5
- 230000004913 activation Effects 0.000 claims description 3
- 230000001678 irradiating effect Effects 0.000 claims description 3
- 238000005259 measurement Methods 0.000 description 55
- 230000033001 locomotion Effects 0.000 description 45
- 230000002123 temporal effect Effects 0.000 description 25
- 230000003287 optical effect Effects 0.000 description 21
- 239000000523 sample Substances 0.000 description 15
- 230000006870 function Effects 0.000 description 12
- 238000004458 analytical method Methods 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 6
- 238000013459 approach Methods 0.000 description 4
- 230000000712 assembly Effects 0.000 description 4
- 238000000429 assembly Methods 0.000 description 4
- 230000006399 behavior Effects 0.000 description 4
- 238000004422 calculation algorithm Methods 0.000 description 4
- 230000000994 depressogenic effect Effects 0.000 description 4
- 238000005192 partition Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000009286 beneficial effect Effects 0.000 description 3
- 230000000903 blocking effect Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 238000012790 confirmation Methods 0.000 description 3
- 238000010276 construction Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 238000012360 testing method Methods 0.000 description 3
- 102100025232 Calcium/calmodulin-dependent protein kinase type II subunit beta Human genes 0.000 description 2
- 241000350052 Daniellia ogea Species 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 239000003086 colorant Substances 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000005019 pattern of movement Effects 0.000 description 2
- 238000007781 pre-processing Methods 0.000 description 2
- 238000013214 routine measurement Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000012152 algorithmic method Methods 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 239000003292 glue Substances 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000009738 saturating Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images





































Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/10—Photometry, e.g. photographic exposure meter by comparison with reference light or electric value provisionally void
- G01J1/20—Photometry, e.g. photographic exposure meter by comparison with reference light or electric value provisionally void intensity of the measured or reference value being varied to equalise their effects at the detectors, e.g. by varying incidence angle
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
- G01B11/005—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates coordinate measuring machines
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/14—Measuring arrangements characterised by the use of optical techniques for measuring distance or clearance between spaced objects or spaced apertures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/66—Tracking systems using electromagnetic waves other than radio waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/86—Combinations of lidar systems with systems other than lidar, radar or sonar, e.g. with direction finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/003—Transmission of data between radar, sonar or lidar systems and remote stations
- G01S7/006—Transmission of data between radar, sonar or lidar systems and remote stations using shared front-end circuitry, e.g. antennas
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/69—Control of means for changing angle of the field of view, e.g. optical zoom objectives or electronic zooming
Description
レーザトラッカの動作の一般的な2つのモードは、追跡モード及びプロファイリングモードである。追跡モードでは、トラッカからのレーザビームは、オペレータが逆反射体を方々に動かすと、その逆反射体に追従する。プロファイリングモードでは、トラッカからのレーザビームは、コンピュータ命令又はマニュアル動作を通してのいずれかで、オペレータによって与えられた方向に進む。
レーザトラッカのオペレータは2つの基礎的な機能を実行する。オペレータは測定の間にSMRを位置決めし、且つ制御コンピュータを通して命令をトラッカに送る。しかし、一人のオペレータがこれらの測定機能の両方を実行することは容易ではない。なぜなら、コンピュータは通常、測定位置から遠く離れているからである。この制約を回避するために様々な方法が試みられてきているが、完全に満足するものはない。
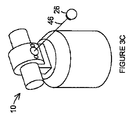
図3A〜3E、図4A〜4C及び図5A〜5Dは検知手法を示し、それによってオペレータは、例示的なレーザトラッカ10によって命令と解釈されて実行されるジェスチャパターンを通信し得る。図3A〜3Eは検知手段を示し、それによってオペレータは、例示的なレーザトラッカ10がその追跡および測定システムを使用して解釈するジェスチャパターンを通信する。図3Aは、逆反射体ターゲット26によって遮られるレーザビーム46を発するレーザトラッカ10を示す。ターゲット46が左右に動くと、トラッカからのレーザビームはその動きに追従する。同時に、トラッカ10の角度エンコーダが、左右方向及び上下方向でのターゲットの角度位置を測定する。角度エンコーダの読みは2次元の角度マップを形成し、これがトラッカによって時間の関数として記録され、動きのパターンを捜すために分析されることができる。
(付記)
[22]
レーザトラッカ(10)の動作を制御するためのユーザからレーザトラッカ(10)への命令を光学的に伝達する方法であって、
複数の命令の各々と複数の時間的パターンの各々との間の対応のルールを提供するステップと、
前記ユーザによって前記複数の命令の中から第1の命令を選択するステップと、
第1の光(46)を前記レーザトラッカ(10)から前記逆反射体(26)に投射するステップと、
前記第1の光(46)の一部である第2の光を前記逆反射体(26)から反射するステップと、
前記第2の光の一部であり第3の光量を有する第3の光を検知することによって第1の検知されたデータを得るステップと、
前記ユーザによって第1の時間と第2の時間の間に、前記第1の命令に対応する第1の時間的パターンを生成するステップであって、前記第1の時間的パターンが、前記第3の光量の減少と、それに引き続く前記第3の光量の増加とを少なくとも含み、前記第1の時間的パターンが、少なくとも部分的に、前記ユーザがある一つ又はそれ以上の期間に前記第1の光(46)が前記逆反射体(26)に到達することをブロックするように前記ユーザの手の一つ又は物体を動かすことによって生成されている、ステップと、
前記第1の命令を、少なくとも部分的に、前記第1の検知されたデータを前記対応のルールに従って処理することに基づいて決定するステップと、
前記第1の命令を前記レーザトラッカ(10)で実行させるステップと、
を包含する、方法。
[23]
前記第1の検知されたデータを得るステップがさらに、
前記第3の光を前記レーザトラッカ(10)に配置された感光性アレイ上に結像させるステップと、
前記感光性アレイ上の前記第3の光をデジタル形態に変換することによって前記第1の検知されたデータを得るステップと、
を含む、上記[22]に記載の方法。
[24]
前記第1の検知されたデータを得るステップがさらに、
少なくとも一つの信号を生成するために、前記第3の光を前記レーザトラッカ(10)に配置された位置検出器で捕捉するステップと、
前記第1の検知されたデータを得るために、前記少なくとも一つの信号をデジタル形態に変換するステップと、
を含む、上記[22]に記載の方法。
[25]
前記第1の検知されたデータを得るステップがさらに、
信号を生成するために前記第3の光を前記レーザトラッカ(10)に配置された距離計で捕捉するステップと、
前記第1の検知されたデータを得るために、前記信号をデジタル形態に変換するステップと、
を含む、上記[22]に記載の方法。
[26]
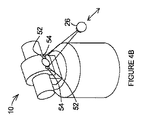
前記第1の光(46)を前記レーザトラッカ(10)から前記逆反射体(26)に投射するステップがさらに、前記第1の光(46)を投射するために、前記レーザトラッカ(10)に配置されたLED(54)を発光させるステップを含む、請求項22に記載の方法。
[27]
前記第1の命令を決定するステップがさらに、
逆反射体(26,126)、第4の光を照射するターゲット光源(122)、及び前記第4の光の発光を制御するユーザ制御装置(124)を含むターゲット(120)を提供するステップと、
前記ユーザ制御装置(124)を起動するステップと、
前記ユーザ制御装置(124)の起動に応答して前記第4の光の一部を検知することで、第2の検知されたデータを得るステップと、
前記第1の命令を少なくとも部分的に前記第2の検知されたデータに基づいて決定するステップと、
をさらに含む、上記[22]に記載の方法。
[31]
レーザトラッカ(10)からの光のビーム(46)を逆反射体(26)に向けて前記逆反射体(26)上にロックするユーザからレーザトラッカ(10)への命令を光学的に伝達する方法であって、
第1の光を前記レーザトラッカ(10)に設けられた光源から前記逆反射体に投射するステップと、
前記第1の光の一部である第2の光を前記逆反射体から反射するステップと、
前記第2の光の一部であり第3の光量を有する第3の光を検知することによって第1の検知されたデータを得るステップであって、前記第1の検知されたデータが、前記第3の光を前記レーザトラッカ(10)に配置された感光性アレイ上に結像させ、前記感光性アレイ上の前記第3の光をデジタル形態に変換することによって得られる、ステップと、
前記ユーザによって第1の時間と第2の時間の間に所定の時間的パターンを生成するステップであって、前記所定の時間的パターンが前記第3の光量の減少と、それに引き続く前記第3の光量の増加とを少なくとも含み、前記所定の時間的パターンが、前記レーザトラッカ(10)からの前記光のビーム(46)を前記逆反射体(26)に向けて前記逆反射体(26)にロックする前記命令に対応する、ステップと、
前記レーザトラッカ(10)によって、前記第1の検知されたデータが前記所定の時間的パターンに対応していることを決定するステップと、
を包含し、
前記決定された所定の時間的パターンに応答して、当該方法はさらに、
前記レーザトラッカ(10)からの前記光のビーム(46)を前記逆反射体(26)に向けさせ、前記逆反射体(26)上に前記レーザトラッカ(10)からの前記光のビームをロックさせるステップと、
を包含する、方法。
[34]
レーザ測定システムであって、
第1の軸(20)及び第2の軸(18)回りに回転可能な構造体(15)と、第1の光ビーム(46)を前記構造体(15)から発する第1の光源と、距離計と、前記第1の軸回りの回転の第1の角度を測定する第1の角度エンコーダと、前記第2の軸回りの回転の第2の角度を測定する第2の角度エンコーダと、プロセッサ(80)と、カメラシステム(52)と、有するレーザトラッカ(10)と、
第2の光源(142)と、前記第2の光源(142)からの第2の光の発射を制御するオペレータ制御の装置(144)と、を含む通信装置(140)と、
前記通信装置(140)とは別個になっている逆反射体ターゲット(26)と、
を備えており、
前記カメラシステム(52)が、前記第2の光源(142)から発せられた光を受領して前記光をデジタル画像に変換するように動作可能であり、
前記プロセッサ(80)が、前記レーザトラッカ(10)の動作を、少なくとも部分的に、第1の時間と第2の時間の間の前記第2の光源(142)の光量の変化に基づいて制御するように動作可能である、
レーザ測定システム。
Claims (41)
- レーザトラッカ(10)の動作を制御するためのユーザからレーザトラッカ(10)への命令を光学的に伝達する方法であって、
複数の命令の各々と複数の空間的パターンの各々との間の対応のルールを提供するステップと、
前記ユーザによって前記複数の命令の中から第1の命令を選択するステップと、
前記ユーザによって第1の時間と第2の時間の間に逆反射体(26)を前記複数の空間的パターンのうち第1の命令に対応している前記第1の空間的パターンで動かすステップと、
第1の光(46)を前記レーザトラッカ(10)から前記逆反射体(26)に投射するステップと、
前記第1の光(46)の一部である第2の光を前記逆反射体(26)から反射するステップと、
前記第2の光の一部である第3の光を検知することによって第1の検知されたデータを得るステップであって、前記第1の検知されたデータが前記第1の時間と前記第2の時間の間に前記レーザトラッカ(10)によって得られる、ステップと、
前記第1の命令を、少なくとも部分的に、前記第1の検知されたデータを前記対応のルールに従って処理することに基づいて決定するステップと、
前記第1の命令を前記レーザトラッカ(10)で実行させるステップと、
を包含する、方法。 - 前記第1の検知されたデータを得るステップがさらに、
前記第3の光を前記レーザトラッカ(10)に配置された感光性アレイ上に結像させるステップと、
前記感光性アレイ上の前記第3の光をデジタル形態に変換することによって前記第1の検知されたデータを得るステップと、
を含む、請求項1に記載の方法。 - 前記第1の検知されたデータを得るステップがさらに、
少なくとも一つの信号を生成するために、前記第3の光を前記レーザトラッカ(10)に配置された位置検出器で捕捉するステップと、
前記第1の検知されたデータを得るために、前記少なくとも一つの信号をデジタル形態に変換するステップと、
を含む、請求項1に記載の方法。 - 前記第1の検知されたデータを得るステップがさらに、前記レーザトラッカ(10)から前記逆反射体(26)までの距離を決定するために、前記第3の光を前記レーザトラッカ(10)に配置された距離計で測定するステップをさらに含み、前記第1の検知されたデータが前記測定された距離である、請求項1に記載の方法。
- 前記第3の光を距離計で測定するステップがさらに、前記レーザトラッカ(10)から前記逆反射体(26)までの絶対距離を絶対距離計で測定するステップをさらに含む、請求項4に記載の方法。
- 前記レーザトラッカ(10)からの前記第1の光(46)を前記逆反射体(26)に投射するステップがさらに、前記第1の光(46)を投射するために、前記レーザトラッカ(10)に配置されたLED(54)を発光させるステップを含む、請求項2に記載の方法。
- 前記第1の光を前記レーザトラッカ(10)から前記逆反射体(26)に投射するステップがさらに、
前記レーザトラッカ(10)に、第1の軸(20)及び第2の軸(18)回りに回転可能な構造体(15)と、距離計と、前記第1の軸(20)回りの回転の第1の角度を測定する第1の角度エンコーダと、前記第2の軸(18)回りの回転の第2の角度を測定する第2の角度エンコーダと、位置検出器と、を設けるステップと、
前記第1の光(46)を前記第2の軸(18)に垂直な線に沿って発するステップと、
を含み、
前記第1の光(46)がおおよそ前記第1の軸(20)と前記第2の軸(18)との交点(22)を通って投射される、請求項1に記載の方法。 - 前記第1の光(46)を前記レーザトラッカ(10)から前記逆反射体(26)に投射するステップがさらに、前記第1の光(46)の方向を前記第3の光の前記位置検出器上での位置に応答して操向するステップをさらに含む、請求項7に記載の方法。
- 前記第1の検知されたデータを得るステップがさらに、前記第1の回転の角度又は前記第2の回転の角度を測定して前記第1の検知されたデータを得るステップを含む、請求項8に記載の方法。
- 前記第1の検知されたデータを得るステップがさらに、前記第1の検知されたデータを得るために、前記レーザトラッカ(10)から前記逆反射体(26)までの距離を前記距離計で測定するステップを含む、請求項8に記載の方法。
- 前記第1の命令を決定するステップがさらに、
逆反射体(26,126)、第4の光を照射するターゲット光源(122)、及び前記第4の光の発光を制御するユーザ制御装置(124)を含むターゲット(120)を提供するステップと、
前記ユーザ制御装置(124)を起動するステップと、
前記ユーザ制御装置(124)の起動に応答して前記第4の光の一部を検知することで、第2の検知されたデータを得るステップと、
前記第1の命令を少なくとも部分的に前記第2の検知されたデータに基づいて決定するステップと、
をさらに含む、請求項1に記載の方法。 - レーザトラッカ(10)の動作を制御するためのユーザからレーザトラッカ(10)への命令を光学的に伝達する方法であって、
複数の命令の各々と3次元座標である複数の位置の各々との間の対応のルールを提供するステップと、
前記ユーザによって前記複数の命令の中から第1の命令を選択するステップと、
前記ユーザによって逆反射体(26)を前記複数の位置のうち前記第1の命令に対応している第1の位置に動かすステップと、
第1の光(46)を前記レーザトラッカ(10)から前記逆反射体(26)に投射するステップと、
前記第1の光(46)の一部である第2の光を前記逆反射体(26)から反射するステップと、
前記第2の光の一部である第3の光を検知することによって第1の検知されたデータを得るステップと、
前記第1の命令を、少なくとも部分的に、前記第1の検知されたデータを前記対応のルールに従って処理することに基づいて決定するステップと、
前記第1の命令を前記レーザトラッカ(10)で実行させるステップと、
を包含する、方法。 - 前記ユーザによって逆反射体(26)を第1の位置に動かすステップがさらに、前記ユーザによって前記逆反射体(26)を複数のマークされた領域を有する命令タブレット(300)へと動かすステップを含み、前記複数のマークされた領域の各々が、前記複数の命令のうちの一つの一部又は全てに関連した前記複数の位置の一つに対応している、請求項12に記載の方法。
- 前記第1の命令を決定するステップがさらに、前記逆反射体(26)を含むターゲットを前記命令タブレット(300)に少なくとも3つの基準点(312,314,316)で接触させるステップをさらに含む、請求項13に記載の方法。
- 前記第1の命令を決定するステップがさらに、
第1の軸(20)及び第2の軸(18)回りに回転可能な構造体(15)と、前記第1の軸(20)回りの前記構造体(15)の回転の第1の角度を測定する第1の角度エンコーダと、前記第2の軸(18)回りの前記構造体(15)の回転の第2の角度を測定する第2の角度エンコーダと、を設けるステップと、
前記第1の軸(20)回りの前記構造体(15)の回転の前記第1の角度を前記第1の角度エンコーダで測定するステップと、
前記第2の軸(18)回りの前記構造体(15)の回転の前記第2の角度を前記第2の角度エンコーダで測定するステップと、
前記第1の軸(20)回りの前記構造体(15)の回転の測定された前記第1の角度及び前記第2の軸(18)回りの前記構造体(15)の回転の測定された前記第2の角度に少なくとも部分的に基づいて前記第1の命令を決定するステップと、
を含む、請求項12に記載の方法。 - 前記第1の検知されたデータを得るステップがさらに、
前記第3の光を前記レーザトラッカ(10)に配置された第1の感光性アレイ上に結像させるステップと、
前記第1の感光性アレイ上の前記第3の光を第1のデジタル情報に変換することによって前記第1の検知されたデータを得るステップと、
を含み、
前記第1の検知されたデータが少なくとも部分的に前記第1のデジタル情報に基づいている、請求項15に記載の方法。 - 前記レーザトラッカ(10)からの前記第1の光(46)を前記逆反射体(26)に投射するステップがさらに、前記第1の光(46)を投射するために、前記レーザトラッカ(10)に配置されたLED(54)を発光させるステップを含む、請求項16に記載の方法。
- 前記第1の命令を決定するステップがさらに、
前記第2の光の一部である第4の光を検知するステップと、
前記第4の光を前記レーザトラッカ(10)に配置された第2の感光性アレイ上に結像させるステップと、
前記第4の光を第2のデジタル情報に変換することによって第2の検知されたデータを得るステップであって、前記第2の検知されたデータが少なくとも部分的に前記第2のデジタル情報に基づいている、ステップと、
前記第1の軸(20)回りの前記構造体(15)の回転の測定された前記第1の角度、前記第2の軸(18)回りの前記構造体(15)の回転の測定された前記第2の角度、前記第1の検知されたデータ、及び前記第2の検知されたデータに少なくとも部分的に基づいて、前記第1の命令を決定するステップと、
を含む、請求項16に記載の方法。 - 前記第1の命令を決定するステップがさらに、
前記構造体(15)を、前記第1の軸(20)回りの回転の第3の角度まで回転するステップと、
前記第1の軸(20)回りの前記構造体(15)の回転の前記第3の角度を前記第1の角度エンコーダで測定するステップと、
前記レーザトラッカ(10)からの第5の光を前記逆反射体(26)に投射するステップと、
前記第5の光の一部である第6の光を前記逆反射体(26)から反射するステップと、
前記第6の光の一部である第7の光を前記第1の感光性アレイ上に結像させるステップと、
前記第1の感光性アレイ上の前記第7の光を第3のデジタル情報に変換することによって第3の検知されたデータを得るステップであって、前記第3の検知されたデータが少なくとも部分的に前記第3のデジタル情報に基づいている、ステップと、
前記第1の軸(20)回りの前記構造体(15)の回転の測定された前記第1の角度、前記第1の軸(20)回りの前記構造体(15)の回転の測定された前記第3の角度、前記第1の検知されたデータ、及び前記第3の検知されたデータに少なくとも部分的に基づいて、前記第1の命令を決定するステップと、
を含む、請求項16に記載の方法。 - 前記第1の命令を決定するステップがさらに、
前記レーザトラッカ(10)に距離計及び位置検出器を設けるステップと、
少なくとも一つの信号を作るために、前記第3の光を前記位置検出器で捕捉するステップと、
前記少なくとも一つの信号を第4のデジタル情報に変換して前記第1の検知されたデータを得るステップであって、前記第1の検知されたデータが少なくとも部分的に前記第4のデジタル情報に基づいている、ステップと、
前記第1の光(46)の方向を前記第1の検知されたデータに基づいて操向するステップと、
前記第2の光の一部である第4の光を距離計で測定することによって第4の検知されたデータを得るステップと、
前記第1の軸(20)回りの前記構造体(15)の回転の測定された前記第1の角度、前記第2の軸(18)回りの前記構造体(15)の回転の測定された前記第2の角度、前記第1の検知されたデータ、及び前記第4の検知されたデータに少なくとも部分的に基づいて、前記第1の命令を決定するステップと、
を含む、請求項15に記載の方法。 - 前記第1の命令を決定するステップがさらに、
前記逆反射体(26,126)、第8の光を照射するターゲット光源(122)、及び前記第8の光の発光を制御するユーザ制御装置(124)を含むターゲット(120)を提供するステップと、
前記ユーザ制御装置(124)を起動するステップと、
前記ユーザ制御装置(124)の起動に応答して前記第8の光の一部を検知することで、第5の検知されたデータを得るステップと、
前記第1の命令を少なくとも部分的に前記第5の検知されたデータに基づいて決定するステップと、
を含む、請求項12に記載の方法。 - 6自由度レーザトラッカの動作を制御するための命令をユーザから前記6自由度レーザトラッカへ光学的に伝達する方法であって、
第1の軸及び第2の軸回りに回転可能な構造体と、
第1の光ビームを前記構造体から発する第1の光源と、
前記第1の光ビームのうち、反射されて前記構造体へ戻る第1の部分を受領する第1の受光器と、
距離計と、
前記第1の軸回りの前記構造体の第1の回転角度を測定する第1の角度エンコーダと、
前記第2の軸回りの前記構造体の第2の回転角度を測定する第2の角度エンコーダと、
前記構造体を前記第1の軸回りに前記第1の回転角度で回転させる第1のモータと、
前記構造体を前記第2の軸回りに前記第2の回転角度で回転させる第2のモータと、
プロセッサと、
を備える前記6自由度レーザトラッカを提供するステップと、
逆反射体を備える6自由度ターゲットを提供するステップと、
前記第1のモータおよび前記第2のモータを用いて前記第1の光ビームを前記逆反射体に向けるステップと、
前記第1の光ビームの前記第1の部分を受領するステップと、
前記第1の回転角度および前記第2の回転角度を測定するステップと、
前記第1の光ビームのうちの前記受領した第1の部分に少なくとも部分的に基づいて、前記6自由度レーザトラッカから前記ターゲットまでの第1の距離を、前記距離計を用いて前記プロセッサによって特定するステップと、
前記第1の距離、前記測定した第1の回転角度、および前記測定した第2の回転角度に少なくとも部分的に基づいて、前記ターゲットについての第1セットの並進座標を前記プロセッサによって特定するステップと、
複数の命令の各々と前記6自由度ターゲットの複数のポーズパターンの各々との間の対応のルールを提供するステップであって、複数のポーズパターンのそれぞれが、前記6自由度ターゲットの第1のポーズから前記6自由度ターゲットの第2のポーズへの少なくとも一つの方向座標の変化を含み、前記6自由度ターゲットの各ポーズが3つの並進座標及び3つの方向座標からなる6つの座標を有する、ステップと、
前記複数の命令の中から、第1のポーズパターンに対応する第1の命令を前記ユーザが選択するステップと、
前記6自由度ターゲットの前記第1のポーズについての第1セットの方向座標を、前記6自由度レーザトラッカで第1の時間に測定するステップと、
前記第1の時間と第2の時間の間に、前記ユーザが、前記6自由度ターゲットの前記第1のポーズから前記6自由度ターゲットの前記第2のポーズへ前記第1のポーズパターンに従って変更するステップと、
前記6自由度ターゲットの前記第2のポーズについての第2セットの方向座標を、前記6自由度レーザトラッカで前記第2の時間に測定するステップと、
前記第2セットの方向座標と前記第1セットの方向座標との間の差に少なくとも部分的に基づいて、前記対応のルールに従って前記第1の命令を特定するステップと、
前記第1の命令を前記6自由度レーザトラッカで実行するステップと、
を包含する方法。 - 請求項22に記載の方法において、
前記6自由度レーザトラッカを提供する前記ステップはさらに、前記第1の軸回りに前記第1の回転角度で回転して第1の画像信号を生成する第1のカメラを設けることを含み、
前記第1セットの方向座標を測定する前記ステップはさらに、前記第1の画像信号に少なくとも部分的に基づいて実施される、方法。 - 請求項23に記載の方法において、
前記6自由度レーザトラッカを提供する前記ステップはさらに、前記第1の軸回りに前記第1の回転角度で回転して第2の画像信号を生成する第2のカメラを設けることを含み、
前記第1セットの方向座標を測定する前記ステップはさらに、前記第2の画像信号に少なくとも部分的に基づいて実施される、方法。 - 請求項23に記載の方法において、
前記6自由度ターゲットを提供する前記ステップはさらに、前記6自由度ターゲットに取り付けられた第2の光源と、前記6自由度ターゲットに取り付けられた制御ボタンとを設けることを含み、
前記第1セットの方向座標を測定する前記ステップはさらに、前記第2の光源に少なくとも部分的に基づいて実施される、方法。 - 請求項23に記載の方法において、
前記6自由度レーザトラッカを設ける前記ステップはさらに、前記第1の軸回りに前記第1の回転角度で回転する第3の光源を提供することを含み、
前記第1セットの方向座標を測定する前記ステップはさらに、前記第3の光源に少なくとも部分的に基づいて実施される、方法。 - 6自由度レーザトラッカの動作を制御するための命令をユーザから前記6自由度レーザトラッカへ光学的に伝達する方法であって、
第1の軸及び第2の軸回りに回転可能な構造体と、
第1の光ビームを前記構造体から発する第1の光源と、
前記第1の光ビームのうち、反射されて前記構造体へ戻る第1の部分を受領する第1の受光器と、
距離計と、
前記第1の軸回りの前記構造体の第1の回転角度を測定する第1の角度エンコーダと、
前記第2の軸回りの前記構造体の第2の回転角度を測定する第2の角度エンコーダと、
前記構造体を前記第1の軸回りに前記第1の回転角度で回転させる第1のモータと、
前記構造体を前記第2の軸回りに前記第2の回転角度で回転させる第2のモータと、
プロセッサと、
前記第1の軸回りに前記第1の回転角度で回転して第1の画像信号を生成する第1のカメラと、
を備える前記6自由度レーザトラッカを提供するステップと、
逆反射体を備える6自由度ターゲットを提供するステップと、
複数の命令の各々と前記6自由度ターゲットの複数のポーズパターンの各々との間の対応のルールを設けるステップであって、複数のポーズパターンの各々が、前記6自由度ターゲットの第1のポーズから前記6自由度ターゲットの第2のポーズへの少なくとも一つの方向座標の変化を含み、前記6自由度ターゲットの各ポーズが3つの並進座標及び3つの方向座標からなる6つの座標を有する、ステップと、
前記複数の命令の中から、第1のポーズパターンに対応する第1の命令を前記ユーザが選択するステップと、
前記6自由度ターゲットの前記第1のポーズについての第1セットの方向座標を、前記6自由度レーザトラッカで第1の時間に測定するステップと、
前記第1の時間と第2の時間の間に、前記ユーザが、前記6自由度ターゲットの前記第1のポーズから前記6自由度ターゲットの前記第2のポーズへ前記第1のポーズパターンに従って変更するステップと、
前記6自由度ターゲットの前記第2のポーズについての第2セットの方向座標を、前記6自由度レーザトラッカで前記第2の時間に測定するステップと、
前記第2セットの方向座標と前記第1セットの方向座標との間の差に少なくとも部分的に基づいて、前記対応のルールに従って前記第1の命令を特定するステップと、
前記第1の命令を前記6自由度レーザトラッカで実行するステップと、
を包含し、
さらに、前記第1の命令は、
前記第1の画像信号に少なくとも部分的に基づいて、前記第1のモータおよび前記第2のモータを用いて前記第1の光ビームを前記逆反射体に向けるステップと、
前記第1の光ビームの前記第1の部分を受領するステップと、
前記第1の回転角度および前記第2の回転角度を測定するステップと、
前記第1の光ビームのうちの前記受領した第1の部分に少なくとも部分的に基づいて、前記6自由度レーザトラッカから前記ターゲットまでの第1の距離を、前記距離計を用いて前記プロセッサで特定するステップと、
前記第1の距離、前記測定した第1の回転角度、および前記測定した第2の回転角度に少なくとも部分的に基づいて、前記ターゲットについての第1セットの並進座標を前記プロセッサで特定するステップと、
前記第1の光ビームが前記6自由度ターゲットを追跡するようにするステップと、を含む、
方法。 - レーザトラッカからの光ビームを逆反射体に向けて前記逆反射体上にロックする命令をユーザから前記レーザトラッカへ光学的に伝達する方法であって、
前記レーザトラッカに配置された光源からの第1の光を前記逆反射体に投射するステップと、
第1の時間と第2の時間の間に、前記ユーザが、前記命令に対応する所定の空間的パターンで前記逆反射体を動かすステップと、
前記第1の光の一部である第2の光を前記逆反射体から反射するステップと、
前記第2の光の一部である第3の光を検知することによって第1の検知データを得るステップであって、前記第1の検知データが、前記第3の光を前記レーザトラッカに配置された感光性アレイ上に結像させ、前記感光性アレイ上の前記第3の光をデジタル形態に変換することによって得られる、ステップと、
前記第1の検知データが前記所定の空間的パターンに対応していることを前記レーザトラッカで特定するステップと、
前記レーザトラッカからの前記光ビームを前記逆反射体に向けるステップと、
前記逆反射体上に前記レーザトラッカからの前記光ビームをロックするステップと、
を包含する方法。 - レーザトラッカの動作を制御するための命令をユーザから前記レーザトラッカへ光学的に伝達する方法であって、
第1の軸及び第2の軸回りに回転可能な構造体と、
前記構造体を前記第1の軸回りに回転させる第1のモータと、
前記構造体を前記第2の軸回りに回転させる第2のモータと、
前記第1の軸回りの前記構造体の第1の回転角度を測定する第1の角度エンコーダと、
前記第2の軸回りの前記構造体の第2の回転角度を測定する第2の角度エンコーダと、
前記構造体によって方向づけられる第1の光ビームを発する第1の光源と、
前記第1の光ビームの一部を第2の光として反射する逆反射体ターゲットと、
前記第2の光の一部を受領して、前記第2の光の速さに少なくとも部分的に基づいて前記レーザトラッカから前記逆反射体までの距離を測定する距離計と、
前記逆反射体上の前記第1の光の位置を測定する位置検出器と、
前記第1のモータによって前記第1の軸回りに回転可能なカメラシステムと、
前記第1のエンコーダ、前記第2のエンコーダ、前記第1のモータ、前記第2のモータ、前記距離計、前記位置検出器、および前記カメラと通信するプロセッサと、
を備える前記レーザトラッカを提供するステップと、
第2の光源と、前記第2の光源からの第3の光の放射を制御するオペレータ制御の装置と、を含む通信装置を提供するステップと、
複数の命令の各々と複数の空間的パターンの各々との間の対応のルールを提供するステップと、
前記複数の命令の中から第1の命令を前記ユーザが選択するステップと、
第1の時間と第2の時間の間の少なくとも一部の期間に前記第2の光源が前記第3の光を放射するように、前記ユーザが前記オペレータ制御の装置を作動させるステップと、
前記第1の時間と前記第2の時間の間に、前記ユーザが、前記複数の空間的パターンのうちの前記第1の命令に対応する第1の空間的パターンで前記通信装置を動かすステップと、
前記第1の時間と前記第2の時間の間に、前記通信装置についての複数の画像を前記カメラで取得するステップと、
前記複数の画像に少なくとも部分的に基づいて、前記第1の空間的パターンを前記プロセッサで特定するステップと、
前記対応のルールと、前記特定された第1の空間的パターンとに少なくとも部分的に基づいて、前記第1の命令を前記プロセッサで特定するステップと、
前記特定された第1の命令に少なくとも部分的に基づいて、前記第1の命令を前記プロセッサで実行するステップと、
を包含する方法。 - 請求項29に記載の方法であってさらに、
前記レーザトラッカから前記逆反射体までの第1の距離を前記距離計で測定するステップと、
前記第1の距離、前記第1の回転角度、および前記第2の回転角度に少なくとも部分的に基づいて、前記逆反射体についての第1の三次元座標を特定するステップと、
を包含する方法。 - 請求項29に記載の方法であって、前記通信装置を提供する前記ステップにおいて、前記通信装置がハンマーに取り付けられている、方法。
- 請求項29に記載の方法であって、前記通信装置を提供する前記ステップにおいて、前記通信装置が前記逆反射体に取り付けられている、方法。
- 請求項29に記載の方法であって、前記通信装置を提供する前記ステップにおいて、前記通信装置が前記逆反射体とは別個になっている、方法。
- 請求項29に記載の方法であって、前記レーザトラッカを提供する前記ステップにおいて、前記カメラは前記第2のモータによって前記第2の軸回りに回転可能である、方法。
- 請求項29に記載の方法であって、前記レーザトラッカを提供する前記ステップにおいて、前記構造体はミラーである、方法。
- 請求項29に記載の方法であって、前記レーザトラッカを提供する前記ステップにおいて、前記構造体は電子装置が取り付けられたペイロードである、方法。
- 請求項29に記載の方法であって、前記レーザトラッカを提供する前記ステップにおいて、前記構造体はレンズが取り付けられたペイロードである、方法。
- 請求項29に記載の方法であって、前記複数の画像を取得する前記ステップにおいて、前記取得は、前記オペレータ制御の装置を作動させる前記ステップによって開始される、方法。
- 請求項29に記載の方法であって、前記オペレータ制御の装置を作動させる前記ステップにおいて、前記第1の時間と前記第2の時間の間に前記第3の光が連続的に放射される、方法。
- 請求項29に記載の方法であって、前記オペレータ制御の装置を作動させる前記ステップにおいて、前記第1の時間と前記第2の時間の間において前記第3の光はパルス状である、方法。
- 請求項30に記載の方法であって、さらに、前記位置検出器によって測定された前記位置に少なくとも部分的に基づいて前記構造体を前記第1のモータおよび前記第2のモータで回転させることによって、前記逆反射体を追跡するステップ、を包含する方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US32629410P | 2010-04-21 | 2010-04-21 | |
| US61/326,294 | 2010-04-21 | ||
| PCT/US2011/033360 WO2011133731A2 (en) | 2010-04-21 | 2011-04-21 | Method and apparatus for using gestures to control a laser tracker |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013055366A Division JP5544032B2 (ja) | 2010-04-21 | 2013-03-18 | ジェスチャを使用してレーザトラッカを制御する方法及びレーザ測定システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013525787A JP2013525787A (ja) | 2013-06-20 |
| JP2013525787A5 JP2013525787A5 (ja) | 2014-05-01 |
| JP5544042B2 true JP5544042B2 (ja) | 2014-07-09 |
Family
ID=44340286
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013506293A Expired - Fee Related JP5544042B2 (ja) | 2010-04-21 | 2011-04-21 | ジェスチャを使用してレーザトラッカを制御する方法及び装置 |
| JP2013055366A Expired - Fee Related JP5544032B2 (ja) | 2010-04-21 | 2013-03-18 | ジェスチャを使用してレーザトラッカを制御する方法及びレーザ測定システム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013055366A Expired - Fee Related JP5544032B2 (ja) | 2010-04-21 | 2013-03-18 | ジェスチャを使用してレーザトラッカを制御する方法及びレーザ測定システム |
Country Status (6)
| Country | Link |
|---|---|
| US (7) | US8422034B2 (ja) |
| JP (2) | JP5544042B2 (ja) |
| CN (1) | CN102906594B (ja) |
| DE (1) | DE112011101407B4 (ja) |
| GB (4) | GB2502197B (ja) |
| WO (1) | WO2011133731A2 (ja) |
Families Citing this family (85)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9482755B2 (en) | 2008-11-17 | 2016-11-01 | Faro Technologies, Inc. | Measurement system having air temperature compensation between a target and a laser tracker |
| US8803055B2 (en) * | 2009-01-09 | 2014-08-12 | Automated Precision Inc. | Volumetric error compensation system with laser tracker and active target |
| US8659749B2 (en) | 2009-08-07 | 2014-02-25 | Faro Technologies, Inc. | Absolute distance meter with optical switch |
| US8619265B2 (en) * | 2011-03-14 | 2013-12-31 | Faro Technologies, Inc. | Automatic measurement of dimensional data with a laser tracker |
| US9772394B2 (en) * | 2010-04-21 | 2017-09-26 | Faro Technologies, Inc. | Method and apparatus for following an operator and locking onto a retroreflector with a laser tracker |
| US8422034B2 (en) | 2010-04-21 | 2013-04-16 | Faro Technologies, Inc. | Method and apparatus for using gestures to control a laser tracker |
| US8724119B2 (en) | 2010-04-21 | 2014-05-13 | Faro Technologies, Inc. | Method for using a handheld appliance to select, lock onto, and track a retroreflector with a laser tracker |
| US9400170B2 (en) | 2010-04-21 | 2016-07-26 | Faro Technologies, Inc. | Automatic measurement of dimensional data within an acceptance region by a laser tracker |
| US9377885B2 (en) * | 2010-04-21 | 2016-06-28 | Faro Technologies, Inc. | Method and apparatus for locking onto a retroreflector with a laser tracker |
| US8537371B2 (en) | 2010-04-21 | 2013-09-17 | Faro Technologies, Inc. | Method and apparatus for using gestures to control a laser tracker |
| GB2503390B (en) | 2011-03-03 | 2014-10-29 | Faro Tech Inc | Target apparatus and method |
| US9875574B2 (en) * | 2013-12-17 | 2018-01-23 | General Electric Company | Method and device for automatically identifying the deepest point on the surface of an anomaly |
| US10586341B2 (en) | 2011-03-04 | 2020-03-10 | General Electric Company | Method and device for measuring features on or near an object |
| US10157495B2 (en) * | 2011-03-04 | 2018-12-18 | General Electric Company | Method and device for displaying a two-dimensional image of a viewed object simultaneously with an image depicting the three-dimensional geometry of the viewed object |
| AU2012230293B2 (en) * | 2011-03-22 | 2015-01-15 | Leica Geosystems Ag | Electro-optical distance measuring device with a gesture-based measurement trigger that functions without contacting the measuring device |
| TWM411744U (en) * | 2011-04-12 | 2011-09-11 | Digilife Technologies Co Ltd | Wireless image-capturing device |
| US9164173B2 (en) | 2011-04-15 | 2015-10-20 | Faro Technologies, Inc. | Laser tracker that uses a fiber-optic coupler and an achromatic launch to align and collimate two wavelengths of light |
| US9686532B2 (en) | 2011-04-15 | 2017-06-20 | Faro Technologies, Inc. | System and method of acquiring three-dimensional coordinates using multiple coordinate measurement devices |
| US9482529B2 (en) | 2011-04-15 | 2016-11-01 | Faro Technologies, Inc. | Three-dimensional coordinate scanner and method of operation |
| JP2014516409A (ja) | 2011-04-15 | 2014-07-10 | ファロ テクノロジーズ インコーポレーテッド | レーザトラッカの改良位置検出器 |
| JP5665677B2 (ja) * | 2011-07-12 | 2015-02-04 | 株式会社東芝 | 追尾装置 |
| US9222771B2 (en) | 2011-10-17 | 2015-12-29 | Kla-Tencor Corp. | Acquisition of information for a construction site |
| US10791257B2 (en) | 2011-11-14 | 2020-09-29 | Gopro, Inc. | Positioning apparatus for photographic and video imaging and recording and system utilizing the same |
| WO2013074612A2 (en) * | 2011-11-14 | 2013-05-23 | Motrr Llc | Positioning apparatus for photographic and video imaging and recording and system utilizing same |
| US9441781B2 (en) | 2011-11-14 | 2016-09-13 | Motrr Llc | Positioning apparatus for photographic and video imaging and recording and system utilizing same |
| EP2602641B1 (de) * | 2011-12-06 | 2014-02-26 | Leica Geosystems AG | Lasertracker mit positionssensitiven Detektoren zur Suche eines Ziels |
| DE102011089824A1 (de) * | 2011-12-23 | 2013-06-27 | Robert Bosch Gmbh | Entfernungsmessvorrichtung |
| DE112013000727T5 (de) * | 2012-01-27 | 2014-11-06 | Faro Technologies, Inc. | Prüfverfahren mit Strichcode-Kennzeichnung |
| JP5797346B2 (ja) * | 2012-01-30 | 2015-10-21 | ファロ テクノロジーズ インコーポレーテッド | 分離可能な球面反射鏡を有する6自由度プローブと共用されるレーザトラッカ |
| EP2639615A1 (de) * | 2012-03-13 | 2013-09-18 | Leica Geosystems AG | Kamerasystem mit einem Zoomobjektiv und einem Linearencoder |
| ITMI20120412A1 (it) * | 2012-03-16 | 2013-09-17 | Ricerca Sul Sist Energetico Rs E S P A | Apparato per il monitoraggio in continuo della distanza da terra di una linea elettrica aerea |
| DE102012008819A1 (de) * | 2012-05-07 | 2013-11-07 | GEOs3D Geodetic and Industrial Surveying GmbH | Vorrichtung und Verfahren zur optischen Vermessung |
| DE102012223457A1 (de) * | 2012-06-12 | 2013-12-12 | Sms Siemag Ag | Verfahren zur Messung des Abstandes einer Messposition von einer Referenzposition |
| US8937725B2 (en) * | 2012-06-14 | 2015-01-20 | Nikon Corporation | Measurement assembly including a metrology system and a pointer that directs the metrology system |
| US20140002338A1 (en) * | 2012-06-28 | 2014-01-02 | Intel Corporation | Techniques for pose estimation and false positive filtering for gesture recognition |
| JP5550124B2 (ja) * | 2012-08-17 | 2014-07-16 | Necシステムテクノロジー株式会社 | 入力装置、機器、入力方法およびプログラム |
| DE102012221760A1 (de) | 2012-11-28 | 2014-05-28 | Hilti Aktiengesellschaft | Zielobjekt für ein Lasermessgerät und Verfahren zum Identifizieren des Zielobjektes |
| DE102012221767A1 (de) * | 2012-11-28 | 2014-05-28 | Hilti Aktiengesellschaft | Vermessungssystem mit aktiven Zielobjekten |
| US9746926B2 (en) | 2012-12-26 | 2017-08-29 | Intel Corporation | Techniques for gesture-based initiation of inter-device wireless connections |
| US9746560B2 (en) | 2013-02-12 | 2017-08-29 | Faro Technologies, Inc. | Combination scanner and tracker device having a focusing mechanism |
| US9036134B2 (en) * | 2013-02-12 | 2015-05-19 | Faro Technologies, Inc. | Multi-mode optical measurement device and method of operation |
| US10134267B2 (en) * | 2013-02-22 | 2018-11-20 | Universal City Studios Llc | System and method for tracking a passive wand and actuating an effect based on a detected wand path |
| US9188430B2 (en) | 2013-03-14 | 2015-11-17 | Faro Technologies, Inc. | Compensation of a structured light scanner that is tracked in six degrees-of-freedom |
| US9041914B2 (en) | 2013-03-15 | 2015-05-26 | Faro Technologies, Inc. | Three-dimensional coordinate scanner and method of operation |
| US10165255B2 (en) * | 2013-03-20 | 2018-12-25 | Trimble Inc. | Indoor navigation via multi-beam laser projection |
| US9234742B2 (en) * | 2013-05-01 | 2016-01-12 | Faro Technologies, Inc. | Method and apparatus for using gestures to control a laser tracker |
| EP2811318B1 (de) * | 2013-06-05 | 2015-07-22 | Sick Ag | Optoelektronischer Sensor |
| US9476695B2 (en) * | 2013-07-03 | 2016-10-25 | Faro Technologies, Inc. | Laser tracker that cooperates with a remote camera bar and coordinate measurement device |
| US10139914B2 (en) * | 2013-09-13 | 2018-11-27 | Nod, Inc. | Methods and apparatus for using the human body as an input device |
| CN103557845B (zh) * | 2013-10-30 | 2016-01-06 | 常州维尔曼光电仪器有限公司 | 节能型绿色激光标线器 |
| US9600928B2 (en) * | 2013-12-17 | 2017-03-21 | General Electric Company | Method and device for automatically identifying a point of interest on the surface of an anomaly |
| US9818039B2 (en) | 2013-12-17 | 2017-11-14 | General Electric Company | Method and device for automatically identifying a point of interest in a depth measurement on a viewed object |
| US9594250B2 (en) | 2013-12-18 | 2017-03-14 | Hexagon Metrology, Inc. | Ultra-portable coordinate measurement machine |
| EP2899566B1 (de) * | 2014-01-24 | 2018-08-22 | Sick Ag | Verfahren zum Konfigurieren eines Laserscanners und Konfigurationsobjekt dafür |
| US9329763B2 (en) | 2014-02-04 | 2016-05-03 | General Electric Company | Method and device for determining geometric property |
| US9903701B2 (en) | 2014-05-14 | 2018-02-27 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a rotary switch |
| US9829305B2 (en) | 2014-05-14 | 2017-11-28 | Faro Technologies, Inc. | Metrology device and method of changing operating system |
| US9746308B2 (en) | 2014-05-14 | 2017-08-29 | Faro Technologies, Inc. | Metrology device and method of performing an inspection |
| US9803969B2 (en) | 2014-05-14 | 2017-10-31 | Faro Technologies, Inc. | Metrology device and method of communicating with portable devices |
| US9921046B2 (en) * | 2014-05-14 | 2018-03-20 | Faro Technologies, Inc. | Metrology device and method of servicing |
| US9395174B2 (en) | 2014-06-27 | 2016-07-19 | Faro Technologies, Inc. | Determining retroreflector orientation by optimizing spatial fit |
| US9291447B2 (en) * | 2014-07-09 | 2016-03-22 | Mitutoyo Corporation | Method for controlling motion of a coordinate measuring machine |
| US9602811B2 (en) | 2014-09-10 | 2017-03-21 | Faro Technologies, Inc. | Method for optically measuring three-dimensional coordinates and controlling a three-dimensional measuring device |
| DE202014010357U1 (de) | 2014-09-10 | 2015-12-11 | Faro Technologies, Inc. | Vorrichtung zum optischen Abtasten und Vermessen einer Umgebung mit einem Handscanner und Steuerung durch Gesten |
| WO2016040271A1 (en) * | 2014-09-10 | 2016-03-17 | Faro Technologies, Inc. | Method for optically measuring three-dimensional coordinates and controlling a three-dimensional measuring device |
| DE102014013678B3 (de) | 2014-09-10 | 2015-12-03 | Faro Technologies, Inc. | Verfahren zum optischen Abtasten und Vermessen einer Umgebung mit einem Handscanner und Steuerung durch Gesten |
| DE102014013677B4 (de) | 2014-09-10 | 2017-06-22 | Faro Technologies, Inc. | Verfahren zum optischen Abtasten und Vermessen einer Umgebung mit einem Handscanner und unterteiltem Display |
| US9693040B2 (en) | 2014-09-10 | 2017-06-27 | Faro Technologies, Inc. | Method for optically measuring three-dimensional coordinates and calibration of a three-dimensional measuring device |
| WO2016073208A1 (en) * | 2014-11-03 | 2016-05-12 | Faro Technologies, Inc. | Method and apparatus for locking onto a retroreflector with a laser tracker |
| CN104457684B (zh) * | 2014-12-31 | 2017-06-06 | 杨浩 | 免固定设站点的全站仪三维变形监测方法 |
| DE102016108587A1 (de) | 2015-05-20 | 2016-11-24 | Faro Technologies, Inc. | Automatische Messung von Dimensionsdaten in einer Akzeptanzregion durch einen Lasertracker |
| CN105606049B (zh) * | 2015-09-11 | 2018-09-21 | 华南农业大学 | 一种相对水面的水田农业机具作业姿态测量方法 |
| DE102015119274B4 (de) * | 2015-11-09 | 2018-07-12 | Björn Habrich | Verfahren und Vorrichtung zur Bestimmung der räumlichen Position eines Gegenstandes mittels interferometrischer Längenmessung |
| CN105607034A (zh) * | 2015-12-23 | 2016-05-25 | 北京凌宇智控科技有限公司 | 一种三维空间检测系统、定位方法及系统 |
| CN106092204A (zh) * | 2016-07-29 | 2016-11-09 | 广东惠利普路桥信息工程有限公司 | 一种红外线扫描的路桥施工数据采集设备 |
| CN107918499B (zh) * | 2016-10-09 | 2022-09-06 | 北京墨土科技有限公司 | 光学定位系统及方法、定位用光学观测设备 |
| US10866320B2 (en) | 2017-01-13 | 2020-12-15 | Faro Technologies, Inc. | Remote control of a laser tracker using a mobile computing device |
| DE102017204306A1 (de) | 2017-03-15 | 2018-09-20 | Zf Friedrichshafen Ag | Anordnung und Verfahren zur Bestimmung eines Steigungssignals in einem Fahrzeug |
| US10591603B2 (en) | 2017-11-15 | 2020-03-17 | Faro Technologies, Inc. | Retroreflector acquisition in a coordinate measuring device |
| US11084171B2 (en) | 2017-11-22 | 2021-08-10 | Fanuc Corporation | Tool posture control apparatus |
| US10697754B2 (en) | 2017-12-07 | 2020-06-30 | Faro Technologies, Inc. | Three-dimensional coordinates of two-dimensional edge lines obtained with a tracker camera |
| CA3093948A1 (en) * | 2019-09-24 | 2021-03-24 | Gerald Stewart Clarke | Apparatus, system, and method for aerial surveying |
| US11563783B2 (en) * | 2020-08-14 | 2023-01-24 | Cisco Technology, Inc. | Distance-based framing for an online conference session |
| CN115388911A (zh) * | 2022-08-24 | 2022-11-25 | Oppo广东移动通信有限公司 | 光学动作捕捉系统的精度测量方法、装置、电子设备 |
| CN117284500B (zh) * | 2023-11-24 | 2024-02-09 | 北京航空航天大学 | 一种基于单目视觉和激光的盘绕式伸展臂位姿调整方法 |
Family Cites Families (153)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4413907A (en) | 1980-11-07 | 1983-11-08 | Robert F. Deike | Remote control surveying |
| SE450975B (sv) | 1981-08-07 | 1987-09-07 | Geotronics Ab | Anordning for operatorskommunikation i ett system for elektronisk distansmetning |
| DE3328335A1 (de) | 1983-08-05 | 1985-02-14 | Messerschmitt-Bölkow-Blohm GmbH, 8012 Ottobrunn | Datenfernueberwachungssystem |
| US4777660A (en) | 1984-11-06 | 1988-10-11 | Optelecom Incorporated | Retroreflective optical communication system |
| US4714339B2 (en) | 1986-02-28 | 2000-05-23 | Us Commerce | Three and five axis laser tracking systems |
| US4790651A (en) | 1987-09-30 | 1988-12-13 | Chesapeake Laser Systems, Inc. | Tracking laser interferometer |
| SE464782B (sv) | 1987-12-22 | 1991-06-10 | Geotronics Ab | Anordning vid ett avstaandsmaetningsinstrument saasom hjaelpmedel vid utsaettning |
| US4983021A (en) | 1988-08-10 | 1991-01-08 | Fergason James L | Modulated retroreflector system |
| SE500856C2 (sv) | 1989-04-06 | 1994-09-19 | Geotronics Ab | Arrangemang att användas vid inmätnings- och/eller utsättningsarbete |
| US5440326A (en) | 1990-03-21 | 1995-08-08 | Gyration, Inc. | Gyroscopic pointer |
| US5138154A (en) | 1990-04-04 | 1992-08-11 | Gyration Inc. | Shaft angle encoder with rotating off-axis interference pattern |
| EP0468677B1 (en) * | 1990-07-18 | 1996-05-15 | Spectra Precision, Inc. | Three dimensional position sensing system and method |
| US5121242A (en) | 1991-02-04 | 1992-06-09 | Martin Marietta Corporation | Retro-reflective optical transceiver |
| DE9205427U1 (ja) | 1992-04-21 | 1992-06-25 | Bodenseewerk Geraetetechnik Gmbh, 7770 Ueberlingen, De | |
| JPH0665818U (ja) * | 1993-02-24 | 1994-09-16 | 株式会社ニコン | 電子レベルシステム |
| US5724264A (en) | 1993-07-16 | 1998-03-03 | Immersion Human Interface Corp. | Method and apparatus for tracking the position and orientation of a stylus and for digitizing a 3-D object |
| US5347306A (en) | 1993-12-17 | 1994-09-13 | Mitsubishi Electric Research Laboratories, Inc. | Animated electronic meeting place |
| SE9402047L (sv) | 1994-06-13 | 1995-12-14 | Contractor Tools Ab | Förfarande och anordning för fjärrstyrning av en eller flera arbetsmaskiner |
| US5594169A (en) | 1994-11-04 | 1997-01-14 | Gyration,Inc. | Optically sensed wire gyroscope apparatus and system, and methods for manufacture and cursor control |
| JP3599805B2 (ja) | 1994-12-09 | 2004-12-08 | 株式会社トプコン | 測量機 |
| US6262801B1 (en) | 1995-05-25 | 2001-07-17 | Kabushiki Kaisha Topcon | Laser reference level setting device |
| SE504941C2 (sv) | 1995-09-14 | 1997-06-02 | Geotronics Ab | Förfarande och anordning för inriktning |
| NO301999B1 (no) | 1995-10-12 | 1998-01-05 | Metronor As | Kombinasjon av laser tracker og kamerabasert koordinatmåling |
| USD378751S (en) | 1995-10-19 | 1997-04-08 | Gyration, Inc. | Graphic display controller |
| US5698784A (en) | 1996-01-24 | 1997-12-16 | Gyration, Inc. | Vibratory rate gyroscope and methods of assembly and operation |
| US5825350A (en) | 1996-03-13 | 1998-10-20 | Gyration, Inc. | Electronic pointing apparatus and method |
| JP3741477B2 (ja) | 1996-03-18 | 2006-02-01 | 株式会社トプコン | 測量システム |
| JP3837609B2 (ja) | 1996-03-19 | 2006-10-25 | 株式会社トプコン | レーザー照射装置 |
| US6681145B1 (en) | 1996-06-06 | 2004-01-20 | The Boeing Company | Method for improving the accuracy of machines |
| WO1998035328A2 (en) | 1997-02-11 | 1998-08-13 | Scientific Generics Limited | Signalling system |
| US5957559A (en) | 1997-04-29 | 1999-09-28 | Virtek Vision Corporation | Laser scanned menu |
| DE19733491B4 (de) | 1997-08-01 | 2009-04-16 | Trimble Jena Gmbh | Verfahren zur Zielsuche für geodätische Geräte |
| US6720949B1 (en) | 1997-08-22 | 2004-04-13 | Timothy R. Pryor | Man machine interfaces and applications |
| US6111563A (en) | 1997-10-27 | 2000-08-29 | Hines; Stephen P. | Cordless retroreflective optical computer mouse |
| US6344846B1 (en) | 1997-10-27 | 2002-02-05 | Stephen P. Hines | Optical retroreflective remote control |
| US6034722A (en) | 1997-11-03 | 2000-03-07 | Trimble Navigation Limited | Remote control and viewing for a total station |
| US6171018B1 (en) | 1997-11-10 | 2001-01-09 | Kabushiki Kaisha Topcon | Automatic control system for construction machinery |
| JP3784154B2 (ja) | 1997-11-14 | 2006-06-07 | 株式会社トプコン | 測量機の通信システム |
| DE69830295T2 (de) | 1997-11-27 | 2005-10-13 | Matsushita Electric Industrial Co., Ltd., Kadoma | Steuerungsverfahren |
| JP3941215B2 (ja) * | 1998-04-16 | 2007-07-04 | 株式会社ニコン | 測量機及びポイント設定方法 |
| US6317954B1 (en) | 1998-05-11 | 2001-11-20 | Vought Aircraft Industries, Inc. | System and method for aligning aircraft coordinate systems |
| US6433866B1 (en) | 1998-05-22 | 2002-08-13 | Trimble Navigation, Ltd | High precision GPS/RTK and laser machine control |
| US6347290B1 (en) | 1998-06-24 | 2002-02-12 | Compaq Information Technologies Group, L.P. | Apparatus and method for detecting and executing positional and gesture commands corresponding to movement of handheld computing device |
| US6573883B1 (en) | 1998-06-24 | 2003-06-03 | Hewlett Packard Development Company, L.P. | Method and apparatus for controlling a computing device with gestures |
| US6681031B2 (en) | 1998-08-10 | 2004-01-20 | Cybernet Systems Corporation | Gesture-controlled interfaces for self-service machines and other applications |
| US6369794B1 (en) | 1998-09-09 | 2002-04-09 | Matsushita Electric Industrial Co., Ltd. | Operation indication outputting device for giving operation indication according to type of user's action |
| JP2000111340A (ja) | 1998-10-08 | 2000-04-18 | Topcon Corp | 測量機の光通信装置 |
| US6222465B1 (en) | 1998-12-09 | 2001-04-24 | Lucent Technologies Inc. | Gesture-based computer interface |
| JP4088906B2 (ja) | 1998-12-16 | 2008-05-21 | 株式会社トプコン | 測量機の受光装置 |
| JP2000234930A (ja) | 1999-02-16 | 2000-08-29 | Topcon Corp | 反射プリズム装置 |
| JP2000266540A (ja) | 1999-03-17 | 2000-09-29 | Topcon Corp | 電子レベル |
| JP4320099B2 (ja) | 1999-03-26 | 2009-08-26 | 株式会社トプコン | 測量装置 |
| US7800758B1 (en) | 1999-07-23 | 2010-09-21 | Faro Laser Trackers, Llc | Laser-based coordinate measuring device and laser-based method for measuring coordinates |
| JP4206568B2 (ja) * | 1999-07-01 | 2009-01-14 | 株式会社ニコン | 自動測量システム |
| US6766036B1 (en) | 1999-07-08 | 2004-07-20 | Timothy R. Pryor | Camera based man machine interfaces |
| WO2001009642A1 (de) * | 1999-07-28 | 2001-02-08 | Leica Geosystems Ag | Verfahren und anordnung zur bestimmung von räumlichen positionen und orientierungen |
| US6567101B1 (en) | 1999-10-13 | 2003-05-20 | Gateway, Inc. | System and method utilizing motion input for manipulating a display of data |
| SE0000850D0 (sv) | 2000-03-13 | 2000-03-13 | Pink Solution Ab | Recognition arrangement |
| GB0022444D0 (en) | 2000-09-13 | 2000-11-01 | Bae Systems Plc | Positioning system and method |
| JP4432246B2 (ja) | 2000-09-29 | 2010-03-17 | ソニー株式会社 | 観客状況判定装置、再生出力制御システム、観客状況判定方法、再生出力制御方法、記録媒体 |
| US6668466B1 (en) | 2000-10-19 | 2003-12-30 | Sandia Corporation | Highly accurate articulated coordinate measuring machine |
| AU2002230814A1 (en) | 2000-11-02 | 2002-05-15 | Essential Reality, Llc | Electronic user worn interface device |
| US7031875B2 (en) | 2001-01-24 | 2006-04-18 | Geo Vector Corporation | Pointing systems for addressing objects |
| KR20020097172A (ko) | 2001-02-08 | 2002-12-31 | 닛폰 고칸 가부시키가이샤 | 3차원 좌표 계측방법, 3차원 좌표 계측장치 및 대형구조물의 건조방법 |
| US7030861B1 (en) | 2001-02-10 | 2006-04-18 | Wayne Carl Westerman | System and method for packing multi-touch gestures onto a hand |
| US6964113B2 (en) | 2001-03-06 | 2005-11-15 | Faro Laser Trackers, Llc | Scale-bar artifact and methods of use |
| EP1241436B1 (fr) | 2001-03-14 | 2014-11-19 | Tesa Sa | Colonne de mesure de dimensions, et procédé permettant d'introduire une commande de changement de mode de mesure dans une telle colonne. |
| CN1531659A (zh) * | 2001-04-10 | 2004-09-22 | �����ɷ� | 遮光器稳定型绝对距离计 |
| US20030014212A1 (en) | 2001-07-12 | 2003-01-16 | Ralston Stuart E. | Augmented vision system using wireless communications |
| JP5037765B2 (ja) | 2001-09-07 | 2012-10-03 | 株式会社トプコン | オペレータ誘導システム |
| US6879933B2 (en) * | 2001-11-16 | 2005-04-12 | Faro Technologies, Inc. | Method and system for assisting a user taking measurements using a coordinate measurement machine |
| EP1466136B1 (en) | 2002-01-16 | 2011-08-03 | Faro Technologies, Inc. | Laser-based coordinate measuring device and laser-based method for measuring coordinates |
| CN100473942C (zh) | 2002-02-14 | 2009-04-01 | Faro科技有限公司 | 带有一体形成的线激光扫描仪的便携式坐标测量机 |
| US6957496B2 (en) | 2002-02-14 | 2005-10-25 | Faro Technologies, Inc. | Method for improving measurement accuracy of a portable coordinate measurement machine |
| AU2003217687A1 (en) | 2002-02-22 | 2003-09-09 | Faro Laser Trackers, Llc | Spherically mounted light source with angle measuring device, tracking system, and method for determining coordinates |
| AU2003239354A1 (en) | 2002-05-06 | 2003-11-11 | Automated Precision, Inc. | Nine dimensional laser tracking system and method |
| US7230689B2 (en) | 2002-08-26 | 2007-06-12 | Lau Kam C | Multi-dimensional measuring system |
| JP2004108939A (ja) | 2002-09-18 | 2004-04-08 | Pentax Precision Co Ltd | 測量機の遠隔操作システム |
| US7765084B2 (en) | 2002-09-20 | 2010-07-27 | Trimble A.B. | Position control arrangement, especially for a surveying instrument, and a surveying instrument |
| SE524329C8 (sv) | 2002-09-20 | 2004-10-20 | Trimble Ab | Ett positionsstyrarrangemang, speciellt för ett geodektiskt instrument, samt ett geodetiskt instrument |
| JP2004144629A (ja) | 2002-10-25 | 2004-05-20 | Pentax Precision Co Ltd | 測量機 |
| JP4255682B2 (ja) | 2002-11-22 | 2009-04-15 | 株式会社トプコン | 反射体自動追尾装置 |
| JP2004170355A (ja) | 2002-11-22 | 2004-06-17 | Topcon Corp | 反射体自動追尾装置 |
| JP4127503B2 (ja) | 2002-11-22 | 2008-07-30 | 株式会社トプコン | 反射体自動追尾装置 |
| SE525290C2 (sv) | 2002-12-20 | 2005-01-25 | Trimble Ab | Geodetiskt system för mätning/utsättning och metod för användning av detsamma |
| US20060146009A1 (en) | 2003-01-22 | 2006-07-06 | Hanno Syrbe | Image control |
| US7233316B2 (en) | 2003-05-01 | 2007-06-19 | Thomson Licensing | Multimedia user interface |
| JP2004340880A (ja) | 2003-05-19 | 2004-12-02 | Soatec Inc | レーザ測定装置 |
| JP2007504459A (ja) * | 2003-09-05 | 2007-03-01 | ファロ テクノロジーズ インコーポレーテッド | 自己補償レーザトラッカ |
| US7583375B2 (en) * | 2003-09-05 | 2009-09-01 | Faro Technologies, Inc. | Self-compensating laser tracker |
| JP4177765B2 (ja) | 2004-01-30 | 2008-11-05 | 株式会社 ソキア・トプコン | 測量システム |
| CN1922511B (zh) | 2004-02-24 | 2010-09-22 | Faro科技有限公司 | 窗口遮盖的后向反射器 |
| KR100631834B1 (ko) | 2004-03-03 | 2006-10-09 | 삼성전기주식회사 | 버튼 조작없이 번호입력이 가능한 휴대폰 및 상기 휴대폰의 번호 입력 방법 |
| US8320708B2 (en) | 2004-04-02 | 2012-11-27 | K-Nfb Reading Technology, Inc. | Tilt adjustment for optical character recognition in portable reading machine |
| JP2005326317A (ja) | 2004-05-14 | 2005-11-24 | Sokkia Co Ltd | 測量システム |
| JP4177784B2 (ja) | 2004-05-14 | 2008-11-05 | 株式会社 ソキア・トプコン | 測量システム |
| US20060009929A1 (en) | 2004-07-06 | 2006-01-12 | Boyette Roger L Jr | In-service insulated tank certification |
| US7761814B2 (en) | 2004-09-13 | 2010-07-20 | Microsoft Corporation | Flick gesture |
| JP4446850B2 (ja) | 2004-09-27 | 2010-04-07 | 株式会社トプコン | 測量装置用ターゲット |
| CN101031817B (zh) | 2004-09-30 | 2011-02-09 | Faro科技有限公司 | 测量移动后向反射器的绝对测距仪 |
| EP1659417A1 (de) | 2004-11-19 | 2006-05-24 | Leica Geosystems AG | Verfahren zur Bestimmung der Ausrichtung eines Ausrichtungsindikators |
| US7388658B2 (en) | 2005-01-12 | 2008-06-17 | Trimble Jena Gmbh | Inclination detection methods and apparatus |
| JP4648025B2 (ja) | 2005-02-09 | 2011-03-09 | 株式会社 ソキア・トプコン | 測量システム |
| JP2006242755A (ja) | 2005-03-03 | 2006-09-14 | Sokkia Co Ltd | 測量システム |
| US7168174B2 (en) | 2005-03-14 | 2007-01-30 | Trimble Navigation Limited | Method and apparatus for machine element control |
| JP5016245B2 (ja) * | 2005-03-29 | 2012-09-05 | ライカ・ゲオジステームス・アクチェンゲゼルシャフト | 物体の六つの自由度を求めるための測定システム |
| JP4427486B2 (ja) | 2005-05-16 | 2010-03-10 | 株式会社東芝 | 機器操作装置 |
| JP4819403B2 (ja) | 2005-06-06 | 2011-11-24 | 株式会社トプコン | 距離測定装置 |
| EP1734336A1 (de) | 2005-06-13 | 2006-12-20 | Leica Geosystems AG | Geodätisches Zielobjekt und Vermessungssystem |
| EP1893942B9 (en) | 2005-06-23 | 2010-07-21 | Faro Technologies Inc. | Apparatus and method for relocating an articulating-arm coordinate measuring machine |
| US7285793B2 (en) | 2005-07-15 | 2007-10-23 | Verisurf Software, Inc. | Coordinate tracking system, apparatus and method of use |
| MX2007015429A (es) | 2005-12-09 | 2008-03-04 | Thomson Licensing | Dispositivo de senalamiento a base de sensor inercial con transceptor removible. |
| EP2821879A1 (en) | 2006-01-06 | 2015-01-07 | Drnc Holdings, Inc. | Method for entering commands and/or characters for a portable communication device equipped with a tilt sensor |
| WO2007079601A1 (de) | 2006-01-13 | 2007-07-19 | Leica Geosystems Ag | Tracking-verfahren und messsystem mit laser-tracker |
| JP5196725B2 (ja) | 2006-02-09 | 2013-05-15 | 株式会社 ソキア・トプコン | 測量機の自動視準装置 |
| JP4904861B2 (ja) | 2006-03-14 | 2012-03-28 | ソニー株式会社 | 体動検出装置、体動検出方法および体動検出プログラム |
| US7976387B2 (en) | 2006-04-11 | 2011-07-12 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Free-standing input device |
| JP2008014653A (ja) | 2006-07-03 | 2008-01-24 | Pentax Industrial Instruments Co Ltd | 測量機 |
| JP5020585B2 (ja) | 2006-09-27 | 2012-09-05 | 株式会社トプコン | 測定システム |
| GB0622451D0 (en) | 2006-11-10 | 2006-12-20 | Intelligent Earth Ltd | Object position and orientation detection device |
| WO2008106999A1 (en) | 2007-03-08 | 2008-09-12 | Trimble Ab | Methods and instruments for estimating target motion |
| US7876457B2 (en) * | 2007-06-13 | 2011-01-25 | Nikon Metrology Nv | Laser metrology system and method |
| WO2009062153A1 (en) | 2007-11-09 | 2009-05-14 | Wms Gaming Inc. | Interaction with 3d space in a gaming system |
| JP2009156772A (ja) | 2007-12-27 | 2009-07-16 | Topcon Corp | 測量システム |
| US8384997B2 (en) | 2008-01-21 | 2013-02-26 | Primesense Ltd | Optical pattern projection |
| WO2009100728A1 (en) | 2008-02-12 | 2009-08-20 | Trimble Ab | Determining coordinates of a target in relation to a survey instruments having a camera |
| US8978440B2 (en) | 2008-02-29 | 2015-03-17 | Trimble Ab | Automated calibration of a surveying instrument |
| EP2247922B1 (en) * | 2008-02-29 | 2015-03-25 | Trimble AB | Determining coordinates of a target in relation to a survey instrument having at least two cameras |
| WO2009151711A2 (en) | 2008-03-21 | 2009-12-17 | Analog Devices, Inc. | Management system for mems inertial sensors |
| CA2732917C (en) | 2008-03-21 | 2017-03-14 | Variation Reduction Solutions, Inc. | External system for robotic accuracy enhancement |
| WO2009120292A2 (en) | 2008-03-24 | 2009-10-01 | Shu Muk Lee | Accelerometer-controlled mobile handheld device |
| JP5060358B2 (ja) * | 2008-03-25 | 2012-10-31 | 株式会社トプコン | 測量システム |
| DE102008020772A1 (de) * | 2008-04-21 | 2009-10-22 | Carl Zeiss 3D Metrology Services Gmbh | Darstellung von Ergebnissen einer Vermessung von Werkstücken |
| JP2012509464A (ja) * | 2008-11-17 | 2012-04-19 | ファロ テクノロジーズ インコーポレーテッド | 六自由度計測装置及び方法 |
| EP2226610A1 (de) | 2009-03-06 | 2010-09-08 | Leica Geosystems AG | Geodätisches Vermessungssystem und Verfahren zum Identifizieren einer Zieleinheit mit einem geodätischen Vermessungsgerät |
| US20100235786A1 (en) | 2009-03-13 | 2010-09-16 | Primesense Ltd. | Enhanced 3d interfacing for remote devices |
| JP2009134761A (ja) * | 2009-03-16 | 2009-06-18 | Hitachi Ltd | 非接触入力インターフェース装置及び情報端末装置 |
| US8082673B2 (en) | 2009-11-06 | 2011-12-27 | Hexagon Metrology Ab | Systems and methods for control and calibration of a CMM |
| US8717417B2 (en) | 2009-04-16 | 2014-05-06 | Primesense Ltd. | Three-dimensional mapping and imaging |
| EP2446300B1 (de) | 2009-06-23 | 2016-10-12 | Leica Geosystems AG | Tracking-verfahren und messsystem mit lasertracker |
| US9582889B2 (en) | 2009-07-30 | 2017-02-28 | Apple Inc. | Depth mapping based on pattern matching and stereoscopic information |
| US7903237B1 (en) | 2009-08-13 | 2011-03-08 | Nen-Tsua Li | Laser rangefinder with a voice control function |
| US8565479B2 (en) | 2009-08-13 | 2013-10-22 | Primesense Ltd. | Extraction of skeletons from 3D maps |
| US8379224B1 (en) * | 2009-09-18 | 2013-02-19 | The Boeing Company | Prismatic alignment artifact |
| US20110069322A1 (en) | 2009-09-21 | 2011-03-24 | Faro Technologies, Inc. | Laser pointing mechanism |
| US8600166B2 (en) * | 2009-11-06 | 2013-12-03 | Sony Corporation | Real time hand tracking, pose classification and interface control |
| US8237934B1 (en) | 2009-11-18 | 2012-08-07 | The Boeing Company | Center marking nest for method of precision locating |
| US8422034B2 (en) | 2010-04-21 | 2013-04-16 | Faro Technologies, Inc. | Method and apparatus for using gestures to control a laser tracker |
| EP2400379A1 (en) * | 2010-06-23 | 2011-12-28 | MFA Informatik AG | Graphical control of a computer by a user |
| US9021344B2 (en) | 2010-08-31 | 2015-04-28 | New River Kinematics, Inc. | Off-line graphical user interface system and method for three-dimensional measurement |
| JP5372897B2 (ja) * | 2010-12-10 | 2013-12-18 | 株式会社 ソキア・トプコン | 測量システム |
| GB2503390B (en) * | 2011-03-03 | 2014-10-29 | Faro Tech Inc | Target apparatus and method |
| AU2012230293B2 (en) | 2011-03-22 | 2015-01-15 | Leica Geosystems Ag | Electro-optical distance measuring device with a gesture-based measurement trigger that functions without contacting the measuring device |
-
2011
- 2011-04-20 US US13/090,889 patent/US8422034B2/en active Active
- 2011-04-21 CN CN201180025727.XA patent/CN102906594B/zh not_active Expired - Fee Related
- 2011-04-21 JP JP2013506293A patent/JP5544042B2/ja not_active Expired - Fee Related
- 2011-04-21 WO PCT/US2011/033360 patent/WO2011133731A2/en active Application Filing
- 2011-04-21 GB GB1307407.5A patent/GB2502197B/en not_active Expired - Fee Related
- 2011-04-21 GB GB1307408.3A patent/GB2498671B/en not_active Expired - Fee Related
- 2011-04-21 GB GB1307402.6A patent/GB2498670B/en not_active Expired - Fee Related
- 2011-04-21 GB GB1220878.1A patent/GB2493481B/en not_active Expired - Fee Related
- 2011-04-21 DE DE112011101407.4T patent/DE112011101407B4/de not_active Expired - Fee Related
-
2012
- 2012-09-13 US US13/613,345 patent/US8437011B2/en active Active
- 2012-09-13 US US13/613,370 patent/US8576380B2/en not_active Expired - Fee Related
- 2012-10-17 US US13/653,535 patent/US8654354B2/en active Active
-
2013
- 2013-03-14 US US13/803,329 patent/US8537375B2/en active Active
- 2013-03-14 US US13/803,479 patent/US8654355B2/en not_active Expired - Fee Related
- 2013-03-18 JP JP2013055366A patent/JP5544032B2/ja not_active Expired - Fee Related
-
2014
- 2014-02-14 US US14/180,900 patent/US8896848B2/en active Active
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5544032B2 (ja) | ジェスチャを使用してレーザトラッカを制御する方法及びレーザ測定システム | |
| US10480929B2 (en) | Method and apparatus for following an operator and locking onto a retroreflector with a laser tracker | |
| US8537371B2 (en) | Method and apparatus for using gestures to control a laser tracker | |
| US9377885B2 (en) | Method and apparatus for locking onto a retroreflector with a laser tracker | |
| US9684055B2 (en) | Method and apparatus for using gestures to control a laser tracker | |
| WO2016073208A1 (en) | Method and apparatus for locking onto a retroreflector with a laser tracker | |
| JP2019507349A (ja) | レーザー・トラッカー・システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140312 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140312 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20140312 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20140401 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140415 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140509 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5544042 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |