JP4177784B2 - 測量システム - Google Patents
測量システム Download PDFInfo
- Publication number
- JP4177784B2 JP4177784B2 JP2004144899A JP2004144899A JP4177784B2 JP 4177784 B2 JP4177784 B2 JP 4177784B2 JP 2004144899 A JP2004144899 A JP 2004144899A JP 2004144899 A JP2004144899 A JP 2004144899A JP 4177784 B2 JP4177784 B2 JP 4177784B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- guide light
- target
- guide
- surveying instrument
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C15/00—Surveying instruments or accessories not provided for in groups G01C1/00 - G01C13/00
- G01C15/002—Active optical surveying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C5/00—Measuring height; Measuring distances transverse to line of sight; Levelling between separated points; Surveyors' levels
Description
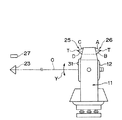
52 測量機本体
54 望遠鏡
56 方向検出器(視準準備手段)
58 視準光
60 ターゲット
64 ガイド光
66 ガイド光送光器
70 無線機(視準準備手段)
100 制御演算部(視準準備手段)
101 駆動部(視準準備手段)
200 光源(発光部)
204 偏光板(発光部)
214 偏光板
206、212 1/4波長板(偏光変換部)
CP、CP’ 円偏光
LP、LP’ 直線偏光
Claims (4)
- 視準のためのターゲットと、該ターゲットに望遠鏡の視準軸を自動的に一致させる自動視準装置を備えた測量機とからなる測量システムであって、
前記ターゲットは、ガイド光を出射するガイド光送光器を備え、
前記測量機は、前記ガイド光を受光して前記ガイド光送光器の方向を検出する方向検出器と、前記自動視準装置を始動させる前に、前記方向検出器からの出力信号に基づいて前記望遠鏡を前記ターゲットの方向に向ける視準準備手段とを備え、
前記ガイド光送光器は円偏光のガイド光を出射し、
前記方向検出器は、前記円偏光のガイド光を直線偏光とする偏光変換部と、前記ガイド光送光器から前記方向検出器に直接入射したガイド光が前記偏光変換部によって直線偏光とされたガイド光の偏光面と一致する偏光面を与える偏光板とを備えることを特徴とする測量システム。 - 前記ガイド光送光器は、直線偏光を発する発光部と、該発光部から発する直線偏光を円偏光のガイド光とする偏光変換部とを備えたことを特徴とする請求項1に記載の測量システム。
- 前記発光部は、光源と、該光源から発する光を直線偏光とする偏光板からなり、前記円偏光のガイド光を直線偏光とする偏光変換部及び直線偏光を円偏光のガイド光とする偏光変換部は、ともに1/4波長板からなることを特徴とする請求項2に記載の測量システム。
- 前記ガイド光送光器が円偏光半導体レーザを備えることを特徴とする請求項1に記載の測量システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004144899A JP4177784B2 (ja) | 2004-05-14 | 2004-05-14 | 測量システム |
| DE102005019058.8A DE102005019058B4 (de) | 2004-05-14 | 2005-04-23 | Vermessungssystem |
| SE0500941A SE527489C2 (sv) | 2004-05-14 | 2005-04-27 | Lantmäterisystem |
| US11/128,182 US7345748B2 (en) | 2004-05-14 | 2005-05-13 | Survey system capable of remotely controlling a surveying instrument |
| CNB2005100726175A CN100535592C (zh) | 2004-05-14 | 2005-05-16 | 测量系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004144899A JP4177784B2 (ja) | 2004-05-14 | 2004-05-14 | 測量システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005326284A JP2005326284A (ja) | 2005-11-24 |
| JP2005326284A5 JP2005326284A5 (ja) | 2006-02-02 |
| JP4177784B2 true JP4177784B2 (ja) | 2008-11-05 |
Family
ID=35267561
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004144899A Active JP4177784B2 (ja) | 2004-05-14 | 2004-05-14 | 測量システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7345748B2 (ja) |
| JP (1) | JP4177784B2 (ja) |
| CN (1) | CN100535592C (ja) |
| DE (1) | DE102005019058B4 (ja) |
| SE (1) | SE527489C2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3971521A1 (en) | 2020-09-18 | 2022-03-23 | Topcon Corporation | Target direction determining device, control system, and method and program for aiming surveying device at a target |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4648025B2 (ja) * | 2005-02-09 | 2011-03-09 | 株式会社 ソキア・トプコン | 測量システム |
| JP2006242755A (ja) * | 2005-03-03 | 2006-09-14 | Sokkia Co Ltd | 測量システム |
| JP5020585B2 (ja) * | 2006-09-27 | 2012-09-05 | 株式会社トプコン | 測定システム |
| US7663736B2 (en) * | 2007-04-10 | 2010-02-16 | Sanyo Electric Co., Ltd. | Laser radar driving apparatus |
| JP5263804B2 (ja) * | 2007-04-20 | 2013-08-14 | 株式会社トプコン | 多点測定方法及び測量装置 |
| US8006394B2 (en) * | 2007-09-05 | 2011-08-30 | Musco Corporation | Apparatus, method and system of precise identification of multiple points distributed throughout an area |
| DE102007055439A1 (de) * | 2007-11-21 | 2009-05-28 | Hilti Aktiengesellschaft | Rotationslaser mit Fernsteuerung |
| JP5124321B2 (ja) * | 2008-03-21 | 2013-01-23 | 株式会社トプコン | 測定システム |
| US9482755B2 (en) | 2008-11-17 | 2016-11-01 | Faro Technologies, Inc. | Measurement system having air temperature compensation between a target and a laser tracker |
| DE102009029234A1 (de) | 2009-09-07 | 2011-03-10 | Robert Bosch Gmbh | Laserprojektor zur Fahrwerksvermessung |
| US8405485B2 (en) * | 2009-10-21 | 2013-03-26 | Musco Corporation | Apparatus, method, and system for identification of multiple points located throughout an area |
| US9772394B2 (en) | 2010-04-21 | 2017-09-26 | Faro Technologies, Inc. | Method and apparatus for following an operator and locking onto a retroreflector with a laser tracker |
| US8537371B2 (en) | 2010-04-21 | 2013-09-17 | Faro Technologies, Inc. | Method and apparatus for using gestures to control a laser tracker |
| US8619265B2 (en) | 2011-03-14 | 2013-12-31 | Faro Technologies, Inc. | Automatic measurement of dimensional data with a laser tracker |
| US9377885B2 (en) | 2010-04-21 | 2016-06-28 | Faro Technologies, Inc. | Method and apparatus for locking onto a retroreflector with a laser tracker |
| US8422034B2 (en) | 2010-04-21 | 2013-04-16 | Faro Technologies, Inc. | Method and apparatus for using gestures to control a laser tracker |
| US8724119B2 (en) | 2010-04-21 | 2014-05-13 | Faro Technologies, Inc. | Method for using a handheld appliance to select, lock onto, and track a retroreflector with a laser tracker |
| US9400170B2 (en) | 2010-04-21 | 2016-07-26 | Faro Technologies, Inc. | Automatic measurement of dimensional data within an acceptance region by a laser tracker |
| GB2518769A (en) | 2011-03-03 | 2015-04-01 | Faro Tech Inc | Target apparatus and method |
| JP5753409B2 (ja) | 2011-03-07 | 2015-07-22 | 株式会社トプコン | パノラマ画像作成方法及び3次元レーザスキャナ |
| JP5725922B2 (ja) | 2011-03-25 | 2015-05-27 | 株式会社トプコン | 測量システム及びこの測量システムに用いる測量用ポール及びこの測量システムに用いる携帯型無線送受信装置 |
| US9164173B2 (en) | 2011-04-15 | 2015-10-20 | Faro Technologies, Inc. | Laser tracker that uses a fiber-optic coupler and an achromatic launch to align and collimate two wavelengths of light |
| US9686532B2 (en) | 2011-04-15 | 2017-06-20 | Faro Technologies, Inc. | System and method of acquiring three-dimensional coordinates using multiple coordinate measurement devices |
| JP2014516409A (ja) | 2011-04-15 | 2014-07-10 | ファロ テクノロジーズ インコーポレーテッド | レーザトラッカの改良位置検出器 |
| US9482529B2 (en) | 2011-04-15 | 2016-11-01 | Faro Technologies, Inc. | Three-dimensional coordinate scanner and method of operation |
| GB2515922A (en) | 2012-01-27 | 2015-01-07 | Faro Tech Inc | Inspection method with barcode identification |
| US9188430B2 (en) | 2013-03-14 | 2015-11-17 | Faro Technologies, Inc. | Compensation of a structured light scanner that is tracked in six degrees-of-freedom |
| US9041914B2 (en) | 2013-03-15 | 2015-05-26 | Faro Technologies, Inc. | Three-dimensional coordinate scanner and method of operation |
| US9395174B2 (en) | 2014-06-27 | 2016-07-19 | Faro Technologies, Inc. | Determining retroreflector orientation by optimizing spatial fit |
| US20160063005A1 (en) * | 2014-08-27 | 2016-03-03 | Toyota Jidosha Kabushiki Kaisha | Communication of cloud-based content to a driver |
| EP3182158B1 (en) * | 2015-12-18 | 2021-11-24 | STMicroelectronics (Research & Development) Limited | Ranging apparatus |
| JP7314447B2 (ja) * | 2019-10-25 | 2023-07-26 | 株式会社トプコン | スキャナシステム及びスキャン方法 |
| CN112612036B (zh) * | 2020-12-01 | 2023-05-05 | 珠海一微半导体股份有限公司 | 一种边界标记方法及移动机器人 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH640050A5 (de) * | 1978-07-20 | 1983-12-15 | Kern & Co Ag | Verfahren und vorrichtung zur messung der relativlage zwischen einem ersten und mindestens einem zweiten punkt. |
| US5098185A (en) * | 1988-06-15 | 1992-03-24 | Japan Industrial Land Development Co., Ltd. | Automatic tracking type measuring apparatus |
| SE500856C2 (sv) * | 1989-04-06 | 1994-09-19 | Geotronics Ab | Arrangemang att användas vid inmätnings- och/eller utsättningsarbete |
| JP2579013Y2 (ja) * | 1992-01-24 | 1998-08-20 | 株式会社ソキア | トラックライト装置 |
| US5612781A (en) | 1993-09-09 | 1997-03-18 | Kabushiki Kaisha Topcon | Object reflector detection system |
| JP3075384B2 (ja) * | 1993-09-16 | 2000-08-14 | 株式会社トプコン | 測量装置 |
| JP3483303B2 (ja) * | 1994-06-21 | 2004-01-06 | 株式会社トプコン | 回転レーザ装置 |
| JP3741477B2 (ja) * | 1996-03-18 | 2006-02-01 | 株式会社トプコン | 測量システム |
| JP4320099B2 (ja) * | 1999-03-26 | 2009-08-26 | 株式会社トプコン | 測量装置 |
| JP4210792B2 (ja) * | 1999-06-15 | 2009-01-21 | 株式会社トプコン | 位置検出装置 |
| JP2003273471A (ja) | 2002-03-18 | 2003-09-26 | Kansai Tlo Kk | 半導体レーザ |
-
2004
- 2004-05-14 JP JP2004144899A patent/JP4177784B2/ja active Active
-
2005
- 2005-04-23 DE DE102005019058.8A patent/DE102005019058B4/de not_active Expired - Fee Related
- 2005-04-27 SE SE0500941A patent/SE527489C2/sv not_active IP Right Cessation
- 2005-05-13 US US11/128,182 patent/US7345748B2/en active Active
- 2005-05-16 CN CNB2005100726175A patent/CN100535592C/zh not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3971521A1 (en) | 2020-09-18 | 2022-03-23 | Topcon Corporation | Target direction determining device, control system, and method and program for aiming surveying device at a target |
| US11933611B2 (en) | 2020-09-18 | 2024-03-19 | Topcon Corporation | Target direction determining device, control system, and method and program for aiming surveying device at a target |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005326284A (ja) | 2005-11-24 |
| CN100535592C (zh) | 2009-09-02 |
| US20050254044A1 (en) | 2005-11-17 |
| SE0500941L (sv) | 2005-11-15 |
| SE527489C2 (sv) | 2006-03-21 |
| US7345748B2 (en) | 2008-03-18 |
| DE102005019058B4 (de) | 2020-08-06 |
| CN1721818A (zh) | 2006-01-18 |
| DE102005019058A1 (de) | 2005-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4177784B2 (ja) | 測量システム | |
| JP4177765B2 (ja) | 測量システム | |
| JP4648025B2 (ja) | 測量システム | |
| JPH09250927A (ja) | 測量システム | |
| JP4531965B2 (ja) | 振れ検出装置、振れ検出装置付き回転レーザ装置及び振れ検出補正装置付き位置測定設定システム | |
| EP2840356B1 (en) | Surveying instrument and surveying operation system | |
| US11004250B2 (en) | Point cloud data display system | |
| EP1061335B1 (en) | Position detecting apparatus | |
| WO1997016703A1 (fr) | Systeme laser rotatif | |
| US11789151B2 (en) | Target unit | |
| EP3812700B1 (en) | Surveying instrument | |
| JP2013152224A (ja) | 光学システム | |
| EP3772633A1 (en) | Surveying instrument | |
| JP6749192B2 (ja) | スキャナ装置および測量装置 | |
| JP7314447B2 (ja) | スキャナシステム及びスキャン方法 | |
| JP7289252B2 (ja) | スキャナシステムおよびスキャン方法 | |
| US20210270640A1 (en) | Angle detection system and angle detection method | |
| JPH07117414B2 (ja) | 自動視準式光波距離計 | |
| JP2024050347A (ja) | ツイストリングポリゴンミラー、送光器、および測量システム | |
| JP2020020672A (ja) | 測量システム、計測モジュール、および測量方法 | |
| JP2003269962A (ja) | 測量機のデータ通信機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051208 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051208 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080318 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080411 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080812 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080822 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110829 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4177784 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110829 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110829 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120829 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120829 Year of fee payment: 4 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120829 Year of fee payment: 4 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120829 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120829 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130829 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130829 Year of fee payment: 5 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130829 Year of fee payment: 5 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130829 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |