JP5466004B2 - 磁気的連結可能ロボット装置および関連する方法 - Google Patents
磁気的連結可能ロボット装置および関連する方法 Download PDFInfo
- Publication number
- JP5466004B2 JP5466004B2 JP2009516581A JP2009516581A JP5466004B2 JP 5466004 B2 JP5466004 B2 JP 5466004B2 JP 2009516581 A JP2009516581 A JP 2009516581A JP 2009516581 A JP2009516581 A JP 2009516581A JP 5466004 B2 JP5466004 B2 JP 5466004B2
- Authority
- JP
- Japan
- Prior art keywords
- component
- robotic device
- imaging
- robotic
- operating
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00158—Holding or positioning arrangements using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/313—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/04—Endoscopic instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/72—Micromanipulators
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/73—Manipulators for magnetic surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/062—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/07—Endoradiosondes
- A61B5/073—Intestinal transmitters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/41—Detecting, measuring or recording for evaluating the immune or lymphatic systems
- A61B5/414—Evaluating particular organs or parts of the immune or lymphatic systems
- A61B5/416—Evaluating particular organs or parts of the immune or lymphatic systems the spleen
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M31/00—Devices for introducing or retaining media, e.g. remedies, in cavities of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/14244—Pressure infusion, e.g. using pumps adapted to be carried by the patient, e.g. portable on the body
- A61M5/14276—Pressure infusion, e.g. using pumps adapted to be carried by the patient, e.g. portable on the body specially adapted for implantation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/142—Pressure infusion, e.g. using pumps
- A61M5/145—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons
- A61M5/1452—Pressure infusion, e.g. using pumps using pressurised reservoirs, e.g. pressurised by means of pistons pressurised by means of pistons
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J7/00—Micromanipulators
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/06—Biopsy forceps, e.g. with cup-shaped jaws
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00398—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like using powered actuators, e.g. stepper motors, solenoids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00876—Material properties magnetic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B2017/22082—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for after introduction of a substance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00595—Cauterization
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00994—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combining two or more different kinds of non-mechanical energy or combining one or more non-mechanical energies with ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
- A61B2034/2057—Details of tracking cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
- A61B2090/065—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension for measuring contact or contact pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/04—Constructional details of apparatus
- A61B2560/0462—Apparatus with built-in sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/35—Communication
- A61M2205/3507—Communication with implanted devices, e.g. external control
- A61M2205/3523—Communication with implanted devices, e.g. external control using telemetric means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/35—Communication
- A61M2205/3546—Range
- A61M2205/3569—Range sublocal, e.g. between console and disposable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/14—Infusion devices, e.g. infusing by gravity; Blood infusion; Accessories therefor
- A61M5/168—Means for controlling media flow to the body or for metering media to the body, e.g. drip meters, counters ; Monitoring media flow to the body
- A61M5/16804—Flow controllers
- A61M5/16827—Flow controllers controlling delivery of multiple fluids, e.g. sequencing, mixing or via separate flow-paths
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B33—ADDITIVE MANUFACTURING TECHNOLOGY
- B33Y—ADDITIVE MANUFACTURING, i.e. MANUFACTURING OF THREE-DIMENSIONAL [3-D] OBJECTS BY ADDITIVE DEPOSITION, ADDITIVE AGGLOMERATION OR ADDITIVE LAYERING, e.g. BY 3-D PRINTING, STEREOLITHOGRAPHY OR SELECTIVE LASER SINTERING
- B33Y80/00—Products made by additive manufacturing
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/01—Mobile robot
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/14—Arm movement, spatial
- Y10S901/15—Jointed arm
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/19—Drive system for arm
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Robotics (AREA)
- Radiology & Medical Imaging (AREA)
- Vascular Medicine (AREA)
- Anesthesiology (AREA)
- Hematology (AREA)
- Optics & Photonics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Immunology (AREA)
- Otolaryngology (AREA)
- Manipulator (AREA)
- Endoscopes (AREA)
Description
しかし、知られている腹腔鏡技術は、一部は1)アクセス・ポートを通じて挿入される硬質ツールを使用した結果生じる移動性の制約、および2)限られた視覚フィードバックのせいで範囲および複雑さの点で制限される。つまり、小切開を通して腹壁内に挿入された長い硬質腹腔鏡ツールは、外科医の行動範囲を制限し、したがって、実施される外科手術の複雑度を制限する。同様に、小切開部を通して挿入された典型的に硬質の腹腔鏡からの2D画像は、外科的環境の総合的な理解を狭い範囲に限定する。さらに、現行技術は、腹腔鏡(カメラ)を受け入れるために第3のポートを必要とし、新しい視点毎に、さらなる切開を必要とする。
さらに他の実施形態は、外科手術の方法である。この方法は、ロボット装置を患者の自然な開口部に通して、その自然な開口部に接続されている通路内に挿入することを含む。さらに、この方法は、通路の壁に切開を行うことと、患者体内の空洞内にロボット装置を挿入することと、患者体内の空洞において手術を実行することとを含む。一実施形態では、この装置は、第1の磁性コンポーネントを有し、この方法は、第2の磁性コンポーネントからなる係脱されたハンドルを患者の外面に配置し、それにより、ロボット装置が係脱されたハンドルへ引かれることを含む。他の実施形態は、この方法は、さらに、係脱されたハンドルを使用してロボット装置を位置決めすることを含む。一実施形態では、自然な開口部は、口であり、壁は、胃である。他の実装では、自然な開口部は、肛門であり、壁は、腸壁である。
図1は、一実施形態による、モバイル・ロボット装置10を示す。装置10は、本体12、2つのホイール14、カメラ16、および有線接続コンポーネント18(本明細書で「テザー」とも呼ぶ)を備える。カメラ16により取り込まれた画像は、接続コンポーネント18を介して表示装置または他の外部コンポーネントに送信できる。装置10は、さらに、ホイール14を回転させる原動力を与えるように構成されているモーター(図に示されていない)、モーターに電力を供給するように構成されている電源(図に示されていない)、および接続コンポーネント18を介して装置10に動作可能なように連結されているコントローラ(図に示されていない)を備える。コントローラは、ユーザーによるコントローラのマニピュレーションを介して装置10を制御または動作させることに対応できるように構成される。一実施形態では、電源は、本体の外に配置され、接続コンポーネント18を介して電力がモーターに送られる。それとは別に、電源は、装置10内に、または装置10上に配置される。
それとは別に、他の実施形態によるモバイル・ロボット装置は、さらに、1つまたは複数の操作コンポーネント(本明細書では「マニピュレーター」とも呼ばれる)および/または1つまたは複数のセンサー・コンポーネントを備えることもできる。これらの実施形態では、装置は、撮像コンポーネントを有する場合も、有しない場合もある。つまり、装置は、1つまたは複数の撮像コンポーネント、1つまたは複数の操作コンポーネント、および1つまたは複数のセンサー・コンポーネントの任意の組合せを備えることができる。
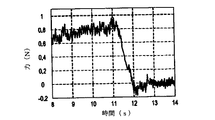
他の実施形態では、本発明のマニピュレーターは、マニピュレーターを操作するのに必要な力を発生する作動機構を備える。例えば、マニピュレーターが生検鉗子または把持器である一実施形態によれば、マニピュレーターは、さらに、鉗子または把持器で生検標本を切断/取得することができる十分な力を発生する作動機構も有する。一実施形態によれば、作動機構は、0.6Nを超える大きさの牽引力を発生する。それとは別に、作動機構は、生検標本を取得するのに十分な量の力を発生する。さらなる代替え実施形態では、作動機構は、クランプ、ホチキス、カッター、焼灼器、バーナーなどの任意の種類のマニピュレーターを操作するのに十分な力を発生する。
他の実施例では、コントローラは、オリジナルの任天堂ゲーム機の方向パッドと似た方向パッドである。このパッドは、+記号に似ており、4つの異なる方向を有する。
一実施形態によれば、モバイル・ロボット装置は、画像表示コンポーネントに連結される。カメラからの信号は、任意の形式(例えば、NTSC、デジタル、PALなど)で画像表示コンポーネントに送信される。一実施形態によれば、この信号は、ビデオ信号または静止画像信号である。一実施形態では、画像表示コンポーネントは、手術者側で表示できるビデオ・ディスプレイである。それとは別に、画像表示コンポーネントは、静止画像ディスプレイである。さらなる代替え実施形態では、画像表示コンポーネントは、ビデオおよび静止画像を表示する。一実施形態では、画像表示コンポーネントは、標準ビデオ・モニターである。当業者であれば、カメラから送られてくる信号を処理し、NTSC信号を表示するように構成されているテレビ、PAL信号を表示するように構成されているテレビ、コンピュータで使用する陰極線管モニター、LCDモニター、およびプラズマ・ディスプレイを含む、多くの異なる種類の表示装置向けの表示信号を発生することができることを理解するであろう。さらに他の実施形態では、画像表示コンポーネントは、本明細書で説明されているロボット装置のどれかとともに使用できるカメラにより取り込まれた画像を表示することができる公知の画像表示コンポーネントである。
一実施形態による、本明細書で説明されているロボット装置は、電源または電力供給装置を有する。一実施形態によれば、電源は、ロボット装置の本体に一体化される。この実施形態では、電源は1つまたは複数の電池とすることができる。電池は、アルカリ電池、リチウム電池、ニッケル・カドミウム電池、または当該技術分野で知られている他の種類の電池とすることができる。
本明細書で開示されているいくつかのロボット装置は、固定ベース・ロボットに関係する。上記のように、「固定ベース・ロボット装置」は、推進輸送コンポーネントを持たないか、またはユーザーにより手動で位置決めされるロボット装置である。このような装置は、本明細書では「静止」ロボット装置とも呼ばれる。一実施形態では、固定ベース・ロボットは、カメラを有し、視覚的フィードバックを送るか、または標的領域の視覚的な概観をもたらすようにユーザーにより手動で位置決めされる。一実施形態による固定ベース・ロボット・カメラ装置は、遠隔制御カメラ・ロボットを用意し、外科手術時に視覚的フィードバックを送ることにより、腹腔鏡および他の外科手技の適用を容易にし、それにより切開および患者リスクを最小限に抑える。
固定ベース・ロボット装置のさまざまな実施形態は、焦点調節可能コンポーネントを有する。例えば、本明細書で説明されている固定ベース・ロボット装置のさまざまな実施形態に組み込むことができる焦点調節可能コンポーネント60の一実施形態は、図4に示されており、また上でも詳しく説明されている。それとは別に、さまざまな焦点調節可能手段または機構が、当該技術分野では知られており、撮像コンポーネントの焦点調節の能動的または受動的作動に適している。例えば、1設計例では、モーターと送りネジを使用する。モーターは、送りネジに取り付けられているターンテーブルを回す。はめ合いナットが撮像装置に取り付けられる。送りネジが回ると、撮像装置は、ロボットの本体に取り付けられているレンズに向かう方向に、また離れる方向に平行移動する。
一実施形態によれば、固定ベース・ロボット装置は、画像表示コンポーネントに連結される。画像表示コンポーネントは、モバイル・ロボット装置に関して上で説明されているような画像表示コンポーネントとすることができる。
本明細書で開示されているいくつかのロボット装置は、磁気的連結可能ロボット装置および関係するシステムに関するものである。上記のように、「磁気的連結可能装置」は、少なくとも一部は患者体外に配置された磁石を介して位置決めされるか、操作されるか、または制御されうるロボット装置である。
一実施形態によれば、磁気的連結可能ロボット装置は、画像表示コンポーネントに連結される。一実施形態では、画像表示コンポーネントは、コントローラの1コンポーネントである。一実施形態では、画像表示コンポーネントは、市販の立体3D画像表示システムである。このようなシステムでは、2つのビデオ・センサーからの画像を使用し、それらの画像を3D効果を生み出すような方法で表示する。例えば、画像表示コンポーネントは、Sharp LL−151−3Dコンピュータ・モニターとすることができる。それとは別に、画像表示コンポーネントは、例えば、リアル・ディー社(Real D)[米国カリフォルニア州ビバリーヒルズ(Beverly Hills)所在]が市販しているCrystalEyes 3(商標)などの、2つのセンサーからの画像を高速度で切り替える、特殊な無線メガネである。それとは別に、画像表示コンポーネントは、モバイル・ロボット装置または固定ベース・ロボット装置に関して上で説明されているような画像表示コンポーネントとすることができる。
本明細書で説明されているロボット装置は、患者の体内で装置が使用されるさまざまな異なる外科手技または手術において使用されうる。つまり、ロボット装置は、外科的作業または手術を実施し、および/またはユーザーに視覚フィードバックを送るために患者体内で使用されうる。
他の実施形態によれば、本明細書で説明されているロボット装置はどれも、自然開口部手術で使用できる。本明細書で使用されているような「自然開口部外科手術」は、身体の標的部分が、外科手術または診査目的で、口、肛門、膣、尿道、耳、または鼻腔などの自然開口部、または他の自然開口部を通してアクセスされる手術である。
一実施形態によれば、この連携手技は、自然開口部手技と組み合わせることができる。つまり、それぞれさまざまな異なる機能を有する複数のロボットを、自然開口部を通して患者体内に挿入することが可能である。この方法では、複数のロボットを無関係に開口部に挿入することができ、これにより、外科手術時に患者体内に外科手術「チーム」を置くことができる。一実施形態では、現行の方法により、破棄された組織(胆嚢など)を取り除き、専用ツール(焼灼など)を挿入するため、食道内に十分な空き領域を形成することができる。
モバイル・ロボット装置の開発において考慮すべき要素の1つは、装置を移動するのに必要なトルクの量であった。
(W sinθ)r=(ma)+lα+τ
W sinθ−f=ma
W cosθ=N
この結果、以下のようになる。
ただし、
Wは、円筒の重量であり、
θは、傾斜面の角度であり、
rは、円筒の半径であり、
mは、円筒の質量であり、
aは、円筒の加速度であり、
lは、円筒の慣性モーメントであり、
αは、円筒の角加速度であり、
τは、モーターのトルクであり、
fは、円筒と傾斜面との間の摩擦力であり、
Nは、法線力である。

2つのホイールの摩擦特性について試験された。
試験された装置は、28.35g(1.0オンス)の重量(「W」)を有するロボットであった。2つのホイールの半径は、7.5mmであり、アルミニウム製であった。
Σf=δ(θ)cos(θ)+τ(θ)sin(l)
となる。
このような解析を実行するときに、ヤコビアンと呼ばれる行列量を定義すると有益であった。ヤコビアンは、関節空間における速度から直交座標空間における速度への写像を指定する。ヤコビアンは、任意のフレームについて求めることができ、また後述の関節トルクを求めるためにも使用されうる。
ヤコビアンを求める際に使用される基本方程式は、
mT=mM+mPG+ME=0.41oz
高周波雑音を除去するために、キャパシタがそれぞれのOPアンプの出力のところに入れられた。この2増幅器回路は、軸毎に全く同じものを用意する。10Kポテンショメーターにより、2.5V基準電圧が供給される。
軸1に対するシステム:
a=427251.2
b=465.3229
c=18.28435
誤差平方和=16.3779
軸2に対するシステム:
a=22.219726*109
b=4.142605*1016
c=56.9335
誤差平方和=2.86986
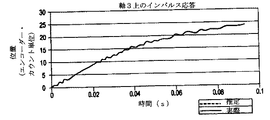
軸3に対するシステム:
a=282220.0
b=414.5029
c=24.2966
誤差平方和=9.7724
すべてのモーターは同一なので、これらは、ロボット上の異なる位置に配置されているとしても、類似のシステム極および零点を有しているべきである。これは、軸1および3に対するシステムについては真であることが示された。しかし、軸2に対するシステムは、他の2つのシステムにあまり適合していなかった。これは、データがよくないせいであると思われた。軸2のモーターに対するインパルスが大きければ大きいほど、より現実的なデータを得るのに役立つと言えた。
Kp、KD、およびK1に対する値の計算は、Ziegler−Nicholsチューニング法とともにRouth Analysisを使用して実行された。Routh Analysisでは、システム伝達関数の特性方程式を使用する。しかし、この場合は、D(s)=Kpだけである。上で定義されたようなG(s)を使用する、利得のみを持つこのシステムの伝達関数は、式
CEの以下の極または根は、以下のとおりである。
軸1に対するシステム:
−467.3563980,
−8.125425989−29.12326516*I,
−8.125425989+29.12326516*I
軸2に対するシステム:
−4142605000e17,
−56.93350000,
−1811514786e−12
軸3に対するシステム:
−417.1080124,
−10.84574379−30.11125593*I,
−10.84574379+30.11125593I
すべての極は、負の実部を持つので、制御されないシステムは、安定しており、Routh Analysisを使用できる。
軸1に対するシステム:
Kp(max)=9.641293894
軸2に対するシステム:
Kp(max)=.4409880606*1018
軸3に対するシステム:
Kp(max)=15.68292936
これらの結果は、すべてMaple Vを使用して得られた。
α1(jω)2+α3=0
をω(システム周波数、rad/s)について解くことにより求められた。
次いで、
ω=2πf
である。
そこで、システム周期(秒)は、
軸1に対するシステム:
T=0.06807959499秒
軸2に対するシステム:
T=0.4087460141*10−8秒
軸3に対するシステム:
T=0.06256709734秒
Kp、K1、およびKDに対するZiegler−Nicholsチューニング法の式を使用することで、上で定義されたコントローラD(s)が設計された。PID制御に対するZiegler−Nicholsチューニング法の式は、
Kp=0.6Kp(max)
軸1に対するシステム:
Kp=5.784776336
KD=0.04922815376
K1=169.9
軸2に対するシステム:
Kp=0.2645928364e16
KD=1351890.840
K1=0.1294656473e25
軸3に対するシステム:
Kp=9.408
KD=0.07357890648
K1=300.7331456
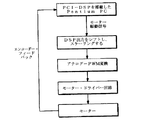
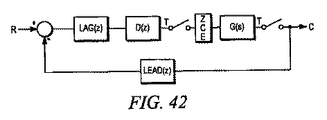
すべてのシステムに対するPID制御のある結果として得られるシステムは、図37に示されているが、ただし、G(s)、Kp、KD、およびK1は、定義済みの定数および関数であり、Cは、エンコーダー・カウント単位で示されるモーター位置であり、Rは、エンコーダー・カウント単位で示される入力位置である。
軸1に対するシステム:
位相マージン=180−162.9633=17.84度
ωc=71.999rad/s
G(jω)=1.0007〜1.0
Φ(added)=60−17.84=42.96度
遅れ補償器による位相損失を補償するために:
Φ(added)=45.0度
軸3に対するシステム:
位相マージン=180−161.90512=18.095度
ωc=71.999rad/s
G(jω)=1.0007〜1.0
Φ(added)=60−18.095=41.905度
遅れ補償器による位相損失を補償するために:
Φ(added)=48.0度
注意すべき点がいくつかある。もう一度、軸2に対するデータの結果、軸1および3のみに対する補償器設計が得られた。また、ωcは所望の周波数に変更できる。G(jω)およびΦ(added)は、その後、選択されたωcにおける位相と大きさに応じて変わる。しかし、位相マージンは、同じままである。
軸1に対する補償器:
軸1に対するシステム:
位相マージン=180−123.88=56.12度@ω=73.199rad/s
軸3に対するシステム:
位相マージン=180−120.238=59.76度@ω=79.599rad/s
これは、位相の所望の60度に合わせて位相マージンを調節する補償器設計が成功したことの証明となっていた。図41Aおよび41Bに示されているのは、補償器の追加後の軸1および3に対するシステムの応答である。これらのプロットは、Maple Vプログラムを使用して作成された。ここでもまた、横軸に時間(秒)をとり、縦軸にエンコーダー・カウント単位のモーター位置をとる。
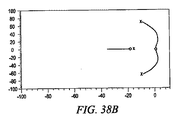
図42において、G(s)のゼロ次ホールドからG(z)が得られる。G(s)からG(z)への変換は、TF(z)=C(z)/R(z)のモデルが作成された場合にのみ実行される。
現在の研究の目標は、モバイル・ロボットを、食道裂孔を通して腹腔内に導入することが可能であることを実証することである。
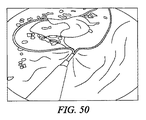
胃腔内に挿入した後、モバイル・ロボットは、EGD制御の下で(内視鏡からの視覚フィードバックを使用して)胃腔内全体にわたって操縦に成功した(図46を参照のこと)。ロボットのサイズは、その運動を妨げることはなく、ホイール設計は、胃腔全体を横断するのに十分な牽引力をもたらすものであった。胃探査の後、小型ロボットを腹腔内に配備し、遠隔制御により操縦し、外科手術チームはロボットを制御して、胃腔内の清掃に成功した。
腹腔を探査するのに成功した後、モバイル・ロボットは、胃腔内に引き込まれた。胃切開部の閉鎖は、内視鏡用クリップおよび1つの内視鏡用ループを使用して正常に行えた。小型ロボットの取り出しは、内視鏡用スネアを使用して難なく実行できた。
方法と材料
本実施例では、図1に示されている装置と似たモバイル・ロボット・カメラ装置が、使用された。装置は、直径20mmであり、オンボードの焦点調達可能ビデオ・カメラ・システムを組み込んでいた。2つのDCモーターは、それぞれのホイールを独立制御しており、これにより、ロボットは前進、後進、および回転の機能を持った。この50グラム装置は、長さ100mmで、らせん状のホイール・プロファイル、および安定化用のテールを備えた。このテールは、移動方向を逆にするときにテールを持ち上げて反転することができるようにする設計であった。これにより、装置は、ホイールの位置を変えることなくカメラを15度傾けることができた。装置は、動力用に繋留された。
図52に示されているように、追加のトロカール挿入および腹腔鏡ツール配置の計画をたて、観察するのを補助するため、外科チームはこの装置を使用した。装置のカメラからの複数の達成可能な画像を用いることで、外科医は、動物の腹壁内にトロカールを安全にかつ適切に計画、配置することができた。
このように実験が成功したことで、生体内カメラ・システムを視覚フィードバックの単独の供給源として使用することによりふつうの腹腔鏡手術を実施することが可能であることが実証された。これは、カメラ・ポートを必要なくし、代わりに、ツール・ポートの1つを通して、この実施例で使用される装置などのモバイル生体内カメラ・ロボットを挿入することにより患者の外傷を低減することが可能である。
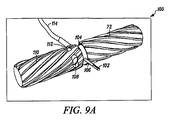
生検時に使用される締め付けおよび牽引力を調べるために、実験的生検が実施された。食道胃十二指腸内視鏡検査(EGD)および大腸内視鏡検査のときに行われる組織標本採取に通常使用される生検鉗子装置は、組織生検時に切断力を測定するように修正された。図55Aに略図が示されているこれらの鉗子560は、近位端上にハンドル/レバー・システムを備える遠位端上の把持器562から成り立っていた。ハンドル564の片側に弾性チューブ566が貼り付けられ、他端は、生検把持器562の支点568に取り付けられた。把持器562を作動させるために、チューブ566内でプラスチック(テフロン(登録商標))で包まれたワイヤー570が使用された。このワイヤー570は、ハンドル・レバー564の自由端に貼り付けられ、また把持器レバー・アーム572の端部に他端のところで貼り付けられた。ハンドル・レバー564を作動させると、ワイヤー570が、チューブ566に関して平行移動し、生検把持器562を作動させた。鉗子の先端には、標本採取時に組織を貫通する小さなスパイク574を備えた。
この調査では、撮像装置は、マイクロン社(Micron)のカラー・デジタルCMOSイメージ・センサーであった。さらに、使用された腹腔鏡は、すべてカール・シュトルツ有限合資会社(Karl Storz GmbH & Co. KG)[ドイツ、ツットリンゲン(Tuttlingen)所在]によって製造されているTricam(商標)SL NTSC制御ユニットおよびキセノン175光源を備える装置である。
変調伝達関数(MTF)は、撮像システムの画質評価を実行するため広く使用されている計量である。MTFは、撮像システムの空間分解能の1尺度である。MTFは、画質の評価のためISO12233解像度チャートとともに使用された。このチャートは、生体内カメラおよび腹腔鏡の両方を使って撮像された。チャートは、150mmの距離のところにあるイメージ・センサーと平行に置かれた。複数の静止画像がキャプチャされ、解析された。変調伝達関数は、
2つのシステムの色精度は、Macbeth ColorChecker(商標)を使用して測定された。ColorChecker(商標)は、一様な照明下に置かれ、複数の静止画像がキャプチャされ、複数の静止画像上で結果が平均された。次いで、Imatest(商標)アプリケーションにより、試験画像がCIELAB色空間に変換された。CIELAB空間は、人間の色知覚に基づく。これは、3次元空間であり、L*は明度、(a*,b*)は色情報を示す。CIELAB空間は、色差の指定を、直線的な方法で行えるようにレイアウトされた。Imatestプログラムは、目標チャート内のカラー・パッチ毎に、それぞれの試験画像色値を知られている色値と比較する。この差の式は、
歪みは、直線を湾曲しているように見せる効果である。半径方向成分と接線方向成分の組合せである、レンズの歪みをモデル化するために、無限級数を使用することができる。しかし、通常は、半径方向の歪みのみを考慮すればよく、1つの項でモデル化できる。これは、
MTF試験では、腹腔鏡は、生体内システムに比べてよい結果を出した。これは、たぶん、生体内システム内の低品質の光学系の制限により引き起こされているが、それというのも、システムのMTFが、システムのそれぞれのコンポーネント(レンズ、撮像装置など)に対するMTFの積となるように定義されているからである。これらの装置の設計では、生体内システムの物理的サイズが小さいことを考慮して、空間に関して光学系の品質を犠牲にしなければならない。腹腔鏡システムは、光学系が生体内に配置されず、代わりに光ファイバーが腹腔鏡先端から高精度の光学計測器まで伸びているため、比較的高品質の光学系を持つことができる。しかし、このことは、腹腔鏡が、生体内ロボット装置よりも優れていることを意味しない。空間分解能の差は、2つのシステムの主観的差を引き起こすほどには大きくない場合がある。ここで説明されている生体内ロボットは、歪み試験において従来の腹腔鏡を凌ぐ。腹腔鏡の歪みが大きいと、手術時の定量的面積測定が困難になる。生体内ロボットは、こうした問題に患わされない。
立体表示ディスプレイにより、奥行きを知覚することができるため、腹腔鏡外科手術ではきわめて有益である。図64Aに示されているロボット・カメラ装置は、上記のマイクロン社(Micron(商標))製イメージ・センサーの2つを含む。この節では、立体撮像性能を定量化するベンチトップ実験室研究の結果を説明する。
y=SRx+IR (11)
それぞれの式の中でy=0と設定し、それぞれの式の中の知られているx座標(−D/2およびD/2)を使用して、ILおよびIRは、
カメラが回転される場合、カメラは対象の様子が比較的よく見える生体内撮像ロボット内にあるので、3つの新しい変数θt(カメラの回転角)、ΔxおよびΔy(回転によるカメラのシフト)が導入される。ここで、回転角は、両方のカメラについて等しいと仮定される。新しい位置は、
y座標は、垂直角度のコサインによりスケーリングされなければならない(26)。
yreal=yobj・cos(tan−1(Sv)) (26)
この数学的解析は、オフラインのMatlabプログラムにより以下の節で実施された。記録された画像を使用して、対象の位置が計算され、空間内でプロットされた。生体内カメラ・ロボットからの立体視の正確さを決定するために、知られている寸法の対象を撮影する。
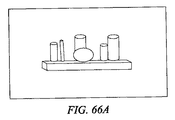
図64Hの実験装置を使用して、複数の画像対をキャプチャし、上記の計算を使用して解析した。左および右の画像対の例が、図66Aおよび66Bに示されている。
ブタ胆嚢摘出術(胆嚢除去)を実施するために、生体内カメラ・ロボットが使用された。外科医は、立体カメラ・ロボットから送られて来るビデオ映像を使用して、手術を実施した。外科医は、立体表示ディスプレイを使用することで、3次元情報を閲覧した。標本画像は、図68Aおよび68Bに示されている。これらの表示画像中で組織をマニピュレートする3つの手術道具が見える。
δx=Jδθ
のように数学的に表すことができる。
Claims (12)
- ロボット装置であって、
(a)患者体内に配置されるように構成された装置本体と、
(b)該装置本体に動作可能なように連結された取付けコンポーネントであって、該取付けコンポーネントは、前記患者の体腔壁を貫通して位置決め可能なピンを含む、前記取付けコンポーネントと、
(c)該装置本体に動作可能なように連結された接続コンポーネントであって、該接続コンポーネントは、テザーを含む、前記接続コンポーネントと、
(d)該テザーに動作可能なように連結された外部電源と、
(e)第1の操作アームであって、
(i)第1の肩関節を介して該装置本体の第1の端部と動作可能なように連結された第1の内部リンクと、
(ii)第1の肘関節を介して前記第1の内部リンクと動作可能なように連結された第1の外部リンクと、
(iii)前記第1の外部リンクと動作可能なように連結された第1の操作コンポーネントとを含む前記第1の操作アームと、
(f)第2の操作アームであって、
(i)第2の肩関節を介して該装置本体の第2の端部と動作可能なように連結された第2の内部リンクと、
(ii)第2の肘関節を介して前記第2の内部リンクと動作可能なように連結された第2の外部リンクと、
(iii)前記第2の外部リンクと動作可能なように連結された第2の操作コンポーネントとを含む前記第2の操作アームと、
(g)前記第1の操作アーム内に配置された少なくとも1つの第1のアクチュエータであって、該少なくとも1つの第1のアクチュエータは、前記テザー及び前記第1の操作アームに動作可能なように連結され、且つ前記第1の操作アームを動作させるように構成されている、前記少なくとも1つの第1のアクチュエータと、
(h)前記第2の操作アーム内に配置された少なくとも1つの第2のアクチュエータであって、該少なくとも1つの第2のアクチュエータは、前記テザー及び前記第2の操作アームに動作可能なように連結され、且つ前記第2の操作アームを動作させるように構成されている、前記少なくとも1つの第2のアクチュエータと、
(i)前記装置本体に動作可能なように連結された少なくとも1つの撮像コンポーネントであって、前記第1及び第2の操作アームの動作中にユーザが前記少なくとも1つの撮像コンポーネントを介して前記第1及び第2の操作アームを見ることができるように、該少なくとも1つの撮像コンポーネントは、前記第1及び第2の操作アーム間に位置付けられる、前記少なくとも1つの撮像コンポーネントとを備えるロボット装置。 - 前記少なくとも1つの撮像コンポーネントは、前記少なくとも1つの撮像コンポーネントが公知の長い硬質の2つの腹腔鏡ツール間の切開を介して位置付けられた場合に公知の腹腔鏡により提供される視野と実質的に同一の視野を提供するように位置付けられる、請求項1に記載のロボット装置。
- 前記第1及び第2の操作アーム及び前記少なくとも1つの撮像コンポーネントは、公知である第1及び第2の長い硬質の腹腔鏡ツール及び公知である腹腔鏡の相対的構成を実質的に近似するように位置決めされ、
前記相対的構成は、前記公知である第1及び第2の長い硬質の腹腔鏡ツール間の切開を貫通して位置付けされた前記公知である腹腔鏡を含む、請求項1に記載のロボット装置。 - 前記第1及び第2の操作アームの各々は、少なくとも4自由度を有して、公知である長い硬質の腹腔鏡ツールを再現する、請求項1に記載のロボット装置。
- 前記テザーと動作可能なように連結された外部コントローラを備え、
前記外部コントローラは、
前記テザーを介して前記少なくとも1つの撮像コンポーネントに動作可能に連結された撮像ディスプレイコンポーネントであって、該撮像ディスプレイコンポーネントは、少なくとも1つの撮像コンポーネントにより取得された画像を表示するように構成される、前記撮像ディスプレイコンポーネントと、
前記テザーを介して前記第1及び第2の操作アームのうちの少なくとも1つに動作可能なように連結された少なくとも1つのジョイスティックであって、該少なくとも1つのジョイスティックは、前記第1及び第2の操作アームのうちの少なくとも1つを制御するように構成される、前記少なくとも1つのジョイスティックとを含む、請求項1に記載のロボット装置。 - 前記第1及び第2の操作アームの各々は、少なくとも3自由度を有する、請求項1に記載のロボット装置。
- 前記第1および第2の操作コンポーネントは、外科用メス、バイオプシー・ツール、焼灼器、鉗子、解剖器、結紮器、ステープラー、および超音波プローブからなる群からそれぞれ選択される、請求項1に記載のロボット装置。
- ロボット装置であって、
(a)患者体内に配置されるように構成された装置本体であって、該装置本体は、前記装置本体の第1の端部に配置されるか又は隣接して配置される第1の肩関節と、前記装置本体の第2の端部に配置されるか又は隣接して配置される第2の肩関節とを含む、前記装置本体と、
(b)該装置本体に動作可能なように連結されたピンであって、該ピンは、前記患者の体腔壁を貫通して位置決め可能である、前記ピンと、
(c)該装置本体に動作可能なように連結されたテザーと、
(d)該テザーに動作可能なように連結された外部電源と、
(d)第1の操作アームであって、
(i)前記第1の肩関節と動作可能なように連結された第1の内部リンクと、
(ii)第1の肘関節を介して前記第1の内部リンクと動作可能なように連結された第1の外部リンクと、
(ii)前記第1の外部リンクと動作可能なように連結された第1の操作コンポーネントとを含む前記第1の操作アームと、
(f)第2の操作アームであって、
(i)前記第2の肩関節を介して動作可能なように連結された第2の内部リンクと、
(ii)第2の肘関節を介して前記第2の内部リンクと動作可能なように連結された第2の外部リンクと、
(iii)前記第2の外部リンクと動作可能なように連結された第2の操作コンポーネントとを含む前記第2の操作アームと、
(g)前記第1の操作アーム内に配置された少なくとも1つの第1のアクチュエータであって、該少なくとも1つの第1のアクチュエータは、前記テザー及び前記第1の操作アームに動作可能なように連結され、且つ前記第1の操作アームを動作させるように構成されている、前記少なくとも1つの第1のアクチュエータと、
(h)前記第2の操作アーム内に配置された少なくとも1つの第2のアクチュエータであって、該少なくとも1つの第2のアクチュエータは、前記テザー及び前記第2の操作アームに動作可能なように連結され、且つ前記第2の操作アームを動作させるように構成されている、前記少なくとも1つの第2のアクチュエータと、
(i)前記装置本体に動作可能なように連結された少なくとも1つの撮像コンポーネントであって、前記第1及び第2の操作アームおよび前記少なくとも1つの撮像コンポーネントが、公知である第1及び第2の長い硬質の腹腔鏡ツール及び公知である腹腔鏡の相対的構成を実質的に近似するように位置決めされるように、該少なくとも1つの撮像コンポーネントは、前記第1及び第2の操作アーム間に位置付けられる、前記少なくとも1つの撮像コンポーネントとを備えるロボット装置。 - 前記第1及び第2の操作アームの各々は、少なくとも3自由度を有する、請求項8に記載のロボット装置。
- 前記第1及び第2の操作アームの各々は、少なくとも4自由度を有する、請求項8に記載のロボット装置。
- 前記テザーと動作可能なように連結された外部コントローラを備え、
前記外部コントローラは、
前記テザーを介して前記少なくとも1つの撮像コンポーネントに動作可能に接続された撮像ディスプレイコンポーネントであって、該撮像ディスプレイコンポーネントは、少なくとも1つの撮像コンポーネントにより取得された画像を表示するように構成されている、前記撮像ディスプレイコンポーネントと、
前記テザーを介して前記第1及び第2の操作アームのうちの少なくとも1つに動作可能なように連結された少なくとも1つのジョイスティックであって、該少なくとも1つのジョイスティックは、前記第1及び第2の操作アームのうちの少なくとも1つを制御するように構成されている、前記少なくとも1つのジョイスティックとを含む、請求項8に記載のロボット装置。 - 前記第1および第2の操作コンポーネントは、外科用メス、バイオプシー・ツール、焼灼器、鉗子、解剖器、結紮器、ステープラー、および超音波プローブからなる群からそれぞれ選択される、請求項8に記載のロボット装置。
Applications Claiming Priority (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US81574106P | 2006-06-22 | 2006-06-22 | |
| US60/815,741 | 2006-06-22 | ||
| US84560806P | 2006-09-19 | 2006-09-19 | |
| US60/845,608 | 2006-09-19 | ||
| US86803006P | 2006-11-30 | 2006-11-30 | |
| US60/868,030 | 2006-11-30 | ||
| US88479207P | 2007-01-12 | 2007-01-12 | |
| US60/884,792 | 2007-01-12 | ||
| US88818207P | 2007-02-05 | 2007-02-05 | |
| US60/888,182 | 2007-02-05 | ||
| PCT/US2007/014567 WO2007149559A2 (en) | 2006-06-22 | 2007-06-21 | Magnetically coupleable robotic devices and related methods |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014010758A Division JP5864628B2 (ja) | 2006-06-22 | 2014-01-23 | 磁気的連結可能ロボット装置および関連する方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009540934A JP2009540934A (ja) | 2009-11-26 |
| JP2009540934A5 JP2009540934A5 (ja) | 2010-08-12 |
| JP5466004B2 true JP5466004B2 (ja) | 2014-04-09 |
Family
ID=44970850
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009516581A Expired - Fee Related JP5466004B2 (ja) | 2006-06-22 | 2007-06-21 | 磁気的連結可能ロボット装置および関連する方法 |
| JP2014010758A Expired - Fee Related JP5864628B2 (ja) | 2006-06-22 | 2014-01-23 | 磁気的連結可能ロボット装置および関連する方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014010758A Expired - Fee Related JP5864628B2 (ja) | 2006-06-22 | 2014-01-23 | 磁気的連結可能ロボット装置および関連する方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (4) | US8968332B2 (ja) |
| EP (2) | EP2034922B1 (ja) |
| JP (2) | JP5466004B2 (ja) |
| CA (4) | CA3068216C (ja) |
| WO (1) | WO2007149559A2 (ja) |
Families Citing this family (318)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7960935B2 (en) * | 2003-07-08 | 2011-06-14 | The Board Of Regents Of The University Of Nebraska | Robotic devices with agent delivery components and related methods |
| US7042184B2 (en) * | 2003-07-08 | 2006-05-09 | Board Of Regents Of The University Of Nebraska | Microrobot for surgical applications |
| US7126303B2 (en) * | 2003-07-08 | 2006-10-24 | Board Of Regents Of The University Of Nebraska | Robot for surgical applications |
| US20080058989A1 (en) * | 2006-04-13 | 2008-03-06 | Board Of Regents Of The University Of Nebraska | Surgical camera robot |
| US20090012530A1 (en) * | 2003-07-15 | 2009-01-08 | Fowler Dennis L | Insertable Device and System For Minimal Access Procedure |
| US7066879B2 (en) | 2003-07-15 | 2006-06-27 | The Trustees Of Columbia University In The City Of New York | Insertable device and system for minimal access procedure |
| US20070244520A1 (en) * | 2004-04-19 | 2007-10-18 | Searete Llc | Lumen-traveling biological interface device and method of use |
| US8024036B2 (en) | 2007-03-19 | 2011-09-20 | The Invention Science Fund I, Llc | Lumen-traveling biological interface device and method of use |
| US8092549B2 (en) | 2004-09-24 | 2012-01-10 | The Invention Science Fund I, Llc | Ciliated stent-like-system |
| US8337482B2 (en) * | 2004-04-19 | 2012-12-25 | The Invention Science Fund I, Llc | System for perfusion management |
| US8512219B2 (en) | 2004-04-19 | 2013-08-20 | The Invention Science Fund I, Llc | Bioelectromagnetic interface system |
| US9011329B2 (en) | 2004-04-19 | 2015-04-21 | Searete Llc | Lumenally-active device |
| US8353896B2 (en) * | 2004-04-19 | 2013-01-15 | The Invention Science Fund I, Llc | Controllable release nasal system |
| US8361013B2 (en) | 2004-04-19 | 2013-01-29 | The Invention Science Fund I, Llc | Telescoping perfusion management system |
| US9492240B2 (en) | 2009-06-16 | 2016-11-15 | Intuitive Surgical Operations, Inc. | Virtual measurement tool for minimally invasive surgery |
| US8971597B2 (en) * | 2005-05-16 | 2015-03-03 | Intuitive Surgical Operations, Inc. | Efficient vision and kinematic data fusion for robotic surgical instruments and other applications |
| US7697827B2 (en) | 2005-10-17 | 2010-04-13 | Konicek Jeffrey C | User-friendlier interfaces for a camera |
| SG132553A1 (en) * | 2005-11-28 | 2007-06-28 | Pang Ah San | A device for laparoscopic or thoracoscopic surgery |
| US8180436B2 (en) * | 2006-04-12 | 2012-05-15 | The Invention Science Fund I, Llc | Systems for autofluorescent imaging and target ablation |
| US20120035437A1 (en) | 2006-04-12 | 2012-02-09 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Navigation of a lumen traveling device toward a target |
| US8163003B2 (en) * | 2006-06-16 | 2012-04-24 | The Invention Science Fund I, Llc | Active blood vessel sleeve methods and systems |
| US9579088B2 (en) * | 2007-02-20 | 2017-02-28 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical visualization and device manipulation |
| EP2034922B1 (en) * | 2006-06-22 | 2017-03-15 | Board of Regents of the University of Nebraska | Magnetically coupleable robotic devices |
| US8974440B2 (en) * | 2007-08-15 | 2015-03-10 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US8679096B2 (en) * | 2007-06-21 | 2014-03-25 | Board Of Regents Of The University Of Nebraska | Multifunctional operational component for robotic devices |
| US8512241B2 (en) | 2006-09-06 | 2013-08-20 | Innurvation, Inc. | Methods and systems for acoustic data transmission |
| US7922064B2 (en) | 2007-05-16 | 2011-04-12 | The Invention Science Fund, I, LLC | Surgical fastening device with cutter |
| US20080287987A1 (en) * | 2007-05-16 | 2008-11-20 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Dispensing system for tissue sealants |
| US7810691B2 (en) * | 2007-05-16 | 2010-10-12 | The Invention Science Fund I, Llc | Gentle touch surgical stapler |
| US8485411B2 (en) * | 2007-05-16 | 2013-07-16 | The Invention Science Fund I, Llc | Gentle touch surgical stapler |
| US7798385B2 (en) * | 2007-05-16 | 2010-09-21 | The Invention Science Fund I, Llc | Surgical stapling instrument with chemical sealant |
| US7823761B2 (en) * | 2007-05-16 | 2010-11-02 | The Invention Science Fund I, Llc | Maneuverable surgical stapler |
| US7832611B2 (en) | 2007-05-16 | 2010-11-16 | The Invention Science Fund I, Llc | Steerable surgical stapler |
| US8343171B2 (en) | 2007-07-12 | 2013-01-01 | Board Of Regents Of The University Of Nebraska | Methods and systems of actuation in robotic devices |
| US20090043246A1 (en) * | 2007-08-07 | 2009-02-12 | Dominguez Guillermo Manuel | Magnetic Surgical Device to Manipulate Tissue in Laparoscopic Surgeries Performed with a Single Trocar or Via Natural Orifices |
| WO2009023839A1 (en) * | 2007-08-15 | 2009-02-19 | Board Of Regents Of The University Of Nebraska | Medical inflation, attachment, and delivery devices and related methods |
| US20090069804A1 (en) * | 2007-09-12 | 2009-03-12 | Jensen Jeffrey L | Apparatus for efficient power delivery |
| JP2009072368A (ja) * | 2007-09-20 | 2009-04-09 | Olympus Medical Systems Corp | 医療装置 |
| US7866524B2 (en) * | 2007-09-24 | 2011-01-11 | Tyco Healthcare Group Lp | Stapler powered auxiliary device for injecting material between stapler jaws |
| US20090112243A1 (en) * | 2007-10-25 | 2009-04-30 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Surgical cutter with dispensing system for tissue sealants |
| US20090112256A1 (en) * | 2007-10-30 | 2009-04-30 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Suturing device with tissue sealant dispenser |
| JP5028219B2 (ja) * | 2007-10-30 | 2012-09-19 | オリンパスメディカルシステムズ株式会社 | マニピュレータ装置および医療機器システム |
| CA3216287A1 (en) | 2007-11-26 | 2009-06-04 | Attractive Surgical, Llc | Magnaretractor system and method |
| EP2214575A2 (en) * | 2007-11-29 | 2010-08-11 | SurgiQuest, Incorporated | Surgical instruments with improved dexterity for use in minimally invasive surgical procedures |
| US20090143816A1 (en) * | 2007-11-30 | 2009-06-04 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Grasper with surgical sealant dispenser |
| WO2009105615A2 (en) | 2008-02-22 | 2009-08-27 | Access Business Group International Llc | Magnetic positioning for inductive coupling |
| JP2010012222A (ja) * | 2008-06-06 | 2010-01-21 | Olympus Medical Systems Corp | 医療装置 |
| US8267853B2 (en) * | 2008-06-23 | 2012-09-18 | Southwest Research Institute | System and method for overlaying ultrasound imagery on a laparoscopic camera display |
| WO2010005571A2 (en) * | 2008-07-09 | 2010-01-14 | Innurvation, Inc. | Displaying image data from a scanner capsule |
| ITFI20080201A1 (it) * | 2008-10-20 | 2010-04-21 | Scuola Superiore Di Studi Universit Ari E Di Perfe | Sistema robotico endoluminale |
| US7856727B2 (en) * | 2008-10-21 | 2010-12-28 | Agatec | Independent position sensor and a system to determine the position of a tool on a works machine using position sensors |
| WO2010047463A1 (en) * | 2008-10-24 | 2010-04-29 | Meerecompany | Laparoscope and setting method thereof |
| EP2355699A4 (en) * | 2008-11-11 | 2012-08-01 | Univ Texas | MEDICAL DEVICES, DEVICES, SYSTEMS AND METHOD |
| US8698898B2 (en) * | 2008-12-11 | 2014-04-15 | Lucasfilm Entertainment Company Ltd. | Controlling robotic motion of camera |
| US8830224B2 (en) | 2008-12-31 | 2014-09-09 | Intuitive Surgical Operations, Inc. | Efficient 3-D telestration for local robotic proctoring |
| EP2381873A2 (en) | 2009-01-16 | 2011-11-02 | The Board Of Regents Of The University Of Texas System | Medical devices and methods |
| US20110306840A1 (en) * | 2009-01-30 | 2011-12-15 | The Trustees Of Columbia University In The City Of New York | Controllable magnetic source to fixture intracorporeal apparatus. |
| US9155592B2 (en) * | 2009-06-16 | 2015-10-13 | Intuitive Surgical Operations, Inc. | Virtual measurement tool for minimally invasive surgery |
| DE102009025013B4 (de) * | 2009-06-16 | 2019-08-29 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Automatisiertes Instrumentenwechselsystem für die minimal-invasive Chirurgie |
| EP2286756B1 (en) * | 2009-08-21 | 2013-04-03 | Novineon Healthcare Technology Partners Gmbh | Surgical manipulator means |
| US20110087224A1 (en) * | 2009-10-09 | 2011-04-14 | Cadeddu Jeffrey A | Magnetic surgical sled with variable arm |
| US10172669B2 (en) | 2009-10-09 | 2019-01-08 | Ethicon Llc | Surgical instrument comprising an energy trigger lockout |
| US8623011B2 (en) | 2009-10-09 | 2014-01-07 | Ethicon Endo-Surgery, Inc. | Magnetic surgical sled with locking arm |
| US8870759B2 (en) * | 2009-12-04 | 2014-10-28 | Covidien Lp | Suspension system for minimally invasive surgery |
| US8747309B2 (en) | 2010-11-09 | 2014-06-10 | Covidien Lp | Suspension system for minimally invasive surgery |
| WO2011075693A1 (en) * | 2009-12-17 | 2011-06-23 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US20110166455A1 (en) * | 2010-01-07 | 2011-07-07 | Cully Edward H | Catheter |
| US9173714B2 (en) * | 2010-03-18 | 2015-11-03 | Covidien Lp | Magnetically secured surgical station with force modulation |
| US8647259B2 (en) | 2010-03-26 | 2014-02-11 | Innurvation, Inc. | Ultrasound scanning capsule endoscope (USCE) |
| US8746252B2 (en) * | 2010-05-14 | 2014-06-10 | Intuitive Surgical Operations, Inc. | Surgical system sterile drape |
| GB2480498A (en) | 2010-05-21 | 2011-11-23 | Ethicon Endo Surgery Inc | Medical device comprising RF circuitry |
| US9516207B2 (en) * | 2010-06-24 | 2016-12-06 | Marc S. Lemchen | Exam-cam robotic systems and methods |
| KR101742534B1 (ko) * | 2010-07-14 | 2017-05-31 | (주)미래컴퍼니 | 멀티 방향 리트랙터 |
| EP2600758A1 (en) | 2010-08-06 | 2013-06-12 | Board of Regents of the University of Nebraska | Methods and systems for handling or delivering materials for natural orifice surgery |
| IT1402326B1 (it) * | 2010-09-16 | 2013-08-30 | Scuola Superiore Di Studi Universitari E Di Perfez | Dispositivo endoscopico |
| US20120078785A1 (en) * | 2010-09-24 | 2012-03-29 | Bank Of America Corporation | Estimated balance |
| WO2012046166A1 (en) * | 2010-10-06 | 2012-04-12 | Koninklijke Philips Electronics N.V. | Electronic pill for delivery of powder medication |
| US10959769B2 (en) | 2010-11-05 | 2021-03-30 | Ethicon Llc | Surgical instrument with slip ring assembly to power ultrasonic transducer |
| US9782214B2 (en) * | 2010-11-05 | 2017-10-10 | Ethicon Llc | Surgical instrument with sensor and powered control |
| US8496077B2 (en) * | 2011-04-28 | 2013-07-30 | California Institute Of Technology | Robotic two-wheeled vehicle |
| ITFI20110114A1 (it) * | 2011-05-31 | 2012-12-01 | Scuola Superiore Di Studi Universit Arie Di Perfe | Piattaforma robotica per chirurgia mininvasiva |
| WO2013048595A1 (en) | 2011-06-10 | 2013-04-04 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to surgical end effectors |
| CA3082073C (en) | 2011-07-11 | 2023-07-25 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| JP5980483B2 (ja) * | 2011-07-22 | 2016-08-31 | オリンパス株式会社 | 医療器具 |
| TW201313415A (zh) * | 2011-09-19 | 2013-04-01 | Hon Hai Prec Ind Co Ltd | 機械手臂的座標校正系統及方法 |
| EP2882330B1 (en) * | 2011-10-03 | 2020-05-13 | Board of Regents of the University of Nebraska | Robotic surgical devices and systems |
| WO2013062978A2 (en) | 2011-10-24 | 2013-05-02 | Ethicon Endo-Surgery, Inc. | Medical instrument |
| US8686839B2 (en) * | 2011-11-01 | 2014-04-01 | Texas Instruments Incorporated | Closed-loop haptic or other tactile feedback system for mobile devices, touch screen devices, and other devices |
| JP6377530B2 (ja) | 2012-01-10 | 2018-08-22 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | 外科的挿入装置 |
| US9539112B2 (en) | 2012-03-28 | 2017-01-10 | Robert L. Thornberry | Computer-guided system for orienting a prosthetic acetabular cup in the acetabulum during total hip replacement surgery |
| US8891924B2 (en) | 2012-04-26 | 2014-11-18 | Bio-Medical Engineering (HK) Limited | Magnetic-anchored robotic system |
| US10179033B2 (en) | 2012-04-26 | 2019-01-15 | Bio-Medical Engineering (HK) Limited | Magnetic-anchored robotic system |
| CA2871149C (en) | 2012-05-01 | 2020-08-25 | Board Of Regents Of The University Of Nebraska | Single site robotic device and related systems and methods |
| US9737364B2 (en) | 2012-05-14 | 2017-08-22 | Vanderbilt University | Local magnetic actuation of surgical devices |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| US11253327B2 (en) * | 2012-06-21 | 2022-02-22 | Globus Medical, Inc. | Systems and methods for automatically changing an end-effector on a surgical robot |
| EP4234185A3 (en) | 2012-06-22 | 2023-09-20 | Board of Regents of the University of Nebraska | Local control robotic surgical devices |
| ITFI20120133A1 (it) * | 2012-06-25 | 2013-12-26 | Scuola Superiore Di Studi Universit Ari E Di Perfe | Dispositivo di acquisizione video a punti di vista multipli per chirurgia mini-invasiva |
| US9770305B2 (en) | 2012-08-08 | 2017-09-26 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| JP2015526171A (ja) | 2012-08-08 | 2015-09-10 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | ロボット手術用デバイス、システム及び関連の方法 |
| US10110785B2 (en) * | 2012-08-10 | 2018-10-23 | Karl Storz Imaging, Inc. | Deployable imaging system equipped with solid state imager |
| US9826904B2 (en) | 2012-09-14 | 2017-11-28 | Vanderbilt University | System and method for detecting tissue surface properties |
| WO2014043697A2 (en) | 2012-09-17 | 2014-03-20 | Omniguide, Inc. | Devices and methods for laser surgery |
| US10372115B2 (en) * | 2012-10-26 | 2019-08-06 | Board Of Regents, The University Of Texas System | Modular and reconfigurable manufacturing systems |
| ES2400283B2 (es) * | 2012-11-30 | 2013-12-09 | Universidad De Málaga | Dispositivo endoscópico magnético |
| KR101293282B1 (ko) | 2013-01-11 | 2013-08-09 | 아주대학교산학협력단 | 수술용 견인장치 |
| WO2014113697A1 (en) | 2013-01-17 | 2014-07-24 | Vanderbilt University | Real-time pose and magnetic force detection for wireless magnetic capsule |
| US8764769B1 (en) | 2013-03-12 | 2014-07-01 | Levita Magnetics International Corp. | Grasper with magnetically-controlled positioning |
| US9743987B2 (en) | 2013-03-14 | 2017-08-29 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to robotic surgical devices, end effectors, and controllers |
| WO2014152418A1 (en) | 2013-03-14 | 2014-09-25 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to force control surgical systems |
| US10667883B2 (en) | 2013-03-15 | 2020-06-02 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| ITFI20130055A1 (it) | 2013-03-18 | 2014-09-19 | Scuola Superiore Di Studi Universit Ari E Di Perfe | Dispositivo robotico miniaturizzato applicabile ad un endoscopio flessibile per la dissezione chirurgica di neoplasie superficiali del tratto gastro-intestinale |
| US9810528B2 (en) | 2013-06-28 | 2017-11-07 | Koninklijke Philips N.V. | Optical shape sensing with a plurality of optical fibers |
| CA2918531A1 (en) | 2013-07-17 | 2015-01-22 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
| WO2015034741A1 (en) * | 2013-09-03 | 2015-03-12 | The General Hospital Corporation | Stabilization system for robotic technology |
| JP6410023B2 (ja) * | 2013-09-06 | 2018-10-24 | パナソニックIpマネジメント株式会社 | マスタスレーブロボットの制御装置及び制御方法、ロボット、マスタスレーブロボットの制御プログラム、並びに、マスタスレーブロボットの制御用集積電子回路 |
| US10297169B2 (en) * | 2014-01-05 | 2019-05-21 | Health Research, Inc. | Intubation simulator and method |
| EP3096673A4 (en) | 2014-01-21 | 2017-10-25 | Levita Magnetics International Corp. | Laparoscopic graspers and systems therefor |
| US9468454B2 (en) * | 2014-01-28 | 2016-10-18 | Ethicon Endo-Surgery, Inc. | Motor control and feedback in powered surgical devices |
| US20170007353A1 (en) * | 2014-02-07 | 2017-01-12 | Brainlab Ag | Detachable tracking reference array |
| EP4295801A3 (en) * | 2014-05-05 | 2024-03-20 | Vicarious Surgical Inc. | Virtual reality surgical device |
| US10758111B2 (en) | 2014-09-09 | 2020-09-01 | Vanderbilt University | Hydro-jet endoscopic capsule and methods for gastric cancer screening in low resource settings |
| CA2961213A1 (en) | 2014-09-12 | 2016-03-17 | Board Of Regents Of The University Of Nebraska | Quick-release end effectors and related systems and methods |
| US11504192B2 (en) | 2014-10-30 | 2022-11-22 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| CA2967593C (en) | 2014-11-11 | 2024-02-27 | Board Of Regents Of The University Of Nebraska | Robotic device with compact joint design and related systems and methods |
| US10159524B2 (en) | 2014-12-22 | 2018-12-25 | Ethicon Llc | High power battery powered RF amplifier topology |
| US9895148B2 (en) * | 2015-03-06 | 2018-02-20 | Ethicon Endo-Surgery, Llc | Monitoring speed control and precision incrementing of motor for powered surgical instruments |
| KR102203928B1 (ko) * | 2015-03-17 | 2021-01-18 | 한국전자통신연구원 | 초광대역 임펄스 레이다 신호를 이용한 마이크로 로봇 위치 인식 방법 및 그에 따른 인식 장치 |
| US10314638B2 (en) | 2015-04-07 | 2019-06-11 | Ethicon Llc | Articulating radio frequency (RF) tissue seal with articulating state sensing |
| ES2897754T3 (es) | 2015-04-13 | 2022-03-02 | Levita Magnetics Int Corp | Dispositivos retractores |
| EP3282954B1 (en) | 2015-04-13 | 2021-07-28 | Levita Magnetics International Corp. | Grasper with magnetically-controlled positioning |
| US9913583B2 (en) * | 2015-07-01 | 2018-03-13 | Rememdia LC | Health monitoring system using outwardly manifested micro-physiological markers |
| CA2994823A1 (en) | 2015-08-03 | 2017-02-09 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
| US10321963B2 (en) * | 2015-08-04 | 2019-06-18 | Vanderbilt University | Apparatus and method for moving an elongate rod |
| JP6768061B2 (ja) * | 2015-09-25 | 2020-10-14 | コヴィディエン リミテッド パートナーシップ | ロボット外科手術アセンブリ及びその電気機械式器具 |
| US10959771B2 (en) | 2015-10-16 | 2021-03-30 | Ethicon Llc | Suction and irrigation sealing grasper |
| US10265058B2 (en) * | 2015-10-19 | 2019-04-23 | DNP Biomed, LLC | Systems, devices, components and methods for displacing and repositioning the esophagus away from the heart during atrial ablation surgical procedures |
| US9668720B2 (en) * | 2015-10-19 | 2017-06-06 | DNP Biomed, LLC | Systems, devices, components and methods for displacing and repositioning the esophagus away from the heart during atrial ablation surgical procedures |
| US10959806B2 (en) | 2015-12-30 | 2021-03-30 | Ethicon Llc | Energized medical device with reusable handle |
| LT3219283T (lt) * | 2016-03-09 | 2021-03-10 | Memic Innovative Surgery Ltd. | Modulinis chirurginis įtaisas, apimantis mechanines rankas |
| US10856934B2 (en) | 2016-04-29 | 2020-12-08 | Ethicon Llc | Electrosurgical instrument with electrically conductive gap setting and tissue engaging members |
| US10987156B2 (en) | 2016-04-29 | 2021-04-27 | Ethicon Llc | Electrosurgical instrument with electrically conductive gap setting member and electrically insulative tissue engaging members |
| DE102016005785B4 (de) * | 2016-05-13 | 2022-08-11 | Drägerwerk AG & Co. KGaA | Tragarmsystem mit zumindest einer arretierbaren gelenkigen Verbindung und Verfahren zum Betrieb eines solchen Tragarmsystems |
| WO2017201310A1 (en) | 2016-05-18 | 2017-11-23 | Virtual Incision Corporation | Robotic surgicla devices, systems and related methods |
| CN110248614B (zh) | 2016-08-25 | 2023-04-18 | 内布拉斯加大学董事会 | 快速释放工具耦接器以及相关系统和方法 |
| JP7090615B2 (ja) | 2016-08-30 | 2022-06-24 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | ロボットデバイス |
| US10751117B2 (en) | 2016-09-23 | 2020-08-25 | Ethicon Llc | Electrosurgical instrument with fluid diverter |
| CA3044674A1 (en) | 2016-11-22 | 2018-05-31 | Board Of Regents Of The University Of Nebraska | Improved gross positioning device and related systems and methods |
| WO2018102430A1 (en) | 2016-11-29 | 2018-06-07 | Virtual Incision Corporation | User controller with user presence detection and related systems and methods |
| US10722319B2 (en) | 2016-12-14 | 2020-07-28 | Virtual Incision Corporation | Releasable attachment device for coupling to medical devices and related systems and methods |
| EP3579736B1 (en) | 2017-02-09 | 2024-09-04 | Vicarious Surgical Inc. | Virtual reality surgical tools system |
| US11033325B2 (en) | 2017-02-16 | 2021-06-15 | Cilag Gmbh International | Electrosurgical instrument with telescoping suction port and debris cleaner |
| US10799284B2 (en) | 2017-03-15 | 2020-10-13 | Ethicon Llc | Electrosurgical instrument with textured jaws |
| US11020137B2 (en) | 2017-03-20 | 2021-06-01 | Levita Magnetics International Corp. | Directable traction systems and methods |
| US11497546B2 (en) | 2017-03-31 | 2022-11-15 | Cilag Gmbh International | Area ratios of patterned coatings on RF electrodes to reduce sticking |
| US10349986B2 (en) | 2017-04-20 | 2019-07-16 | Warsaw Orthopedic, Inc. | Spinal implant system and method |
| US11033341B2 (en) | 2017-05-10 | 2021-06-15 | Mako Surgical Corp. | Robotic spine surgery system and methods |
| EP4344658A3 (en) * | 2017-05-10 | 2024-07-03 | MAKO Surgical Corp. | Robotic spine surgery system |
| US10809134B2 (en) | 2017-05-24 | 2020-10-20 | Cisco Technology, Inc. | Thermal modeling for cables transmitting data and power |
| US11054457B2 (en) * | 2017-05-24 | 2021-07-06 | Cisco Technology, Inc. | Safety monitoring for cables transmitting data and power |
| CN107221736B (zh) * | 2017-05-27 | 2023-05-12 | 西安工业大学 | 卫星精准定位仪器用机械式阻尼安装定位挂架 |
| US10603117B2 (en) | 2017-06-28 | 2020-03-31 | Ethicon Llc | Articulation state detection mechanisms |
| US10585429B2 (en) * | 2017-08-01 | 2020-03-10 | Dynamic Research, Inc. | Robotic steering controller for optimal free response evaluation |
| US11382662B2 (en) | 2017-08-04 | 2022-07-12 | The Brigham And Women's Hospital, Inc. | Trocars and veress-type needles with illuminated guidance and safety features |
| JP7208993B2 (ja) | 2017-08-04 | 2023-01-19 | ブリガム アンド ウィメンズ ホスピタル,インク. | 照明された案内と安全な特徴とを有するベレス型の針 |
| CA3075692A1 (en) | 2017-09-14 | 2019-03-21 | Vicarious Surgical Inc. | Virtual reality surgical camera system |
| CA3076625A1 (en) * | 2017-09-27 | 2019-04-04 | Virtual Incision Corporation | Robotic surgical devices with tracking camera technology and related systems and methods |
| US11484358B2 (en) | 2017-09-29 | 2022-11-01 | Cilag Gmbh International | Flexible electrosurgical instrument |
| US11490951B2 (en) | 2017-09-29 | 2022-11-08 | Cilag Gmbh International | Saline contact with electrodes |
| US11033323B2 (en) | 2017-09-29 | 2021-06-15 | Cilag Gmbh International | Systems and methods for managing fluid and suction in electrosurgical systems |
| US11122965B2 (en) | 2017-10-09 | 2021-09-21 | Vanderbilt University | Robotic capsule system with magnetic actuation and localization |
| US11564756B2 (en) | 2017-10-30 | 2023-01-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11291510B2 (en) | 2017-10-30 | 2022-04-05 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11510741B2 (en) | 2017-10-30 | 2022-11-29 | Cilag Gmbh International | Method for producing a surgical instrument comprising a smart electrical system |
| US11311342B2 (en) | 2017-10-30 | 2022-04-26 | Cilag Gmbh International | Method for communicating with surgical instrument systems |
| US11317919B2 (en) | 2017-10-30 | 2022-05-03 | Cilag Gmbh International | Clip applier comprising a clip crimping system |
| US10952708B2 (en) | 2017-10-30 | 2021-03-23 | Ethicon Llc | Surgical instrument with rotary drive selectively actuating multiple end effector functions |
| US11413042B2 (en) | 2017-10-30 | 2022-08-16 | Cilag Gmbh International | Clip applier comprising a reciprocating clip advancing member |
| US11129634B2 (en) | 2017-10-30 | 2021-09-28 | Cilag Gmbh International | Surgical instrument with rotary drive selectively actuating multiple end effector functions |
| US11229436B2 (en) | 2017-10-30 | 2022-01-25 | Cilag Gmbh International | Surgical system comprising a surgical tool and a surgical hub |
| WO2019089293A1 (en) * | 2017-10-30 | 2019-05-09 | Ethicon Llc | Surgical instrument systems comprising battery arrangements |
| US11759224B2 (en) | 2017-10-30 | 2023-09-19 | Cilag Gmbh International | Surgical instrument systems comprising handle arrangements |
| US10932804B2 (en) | 2017-10-30 | 2021-03-02 | Ethicon Llc | Surgical instrument with sensor and/or control systems |
| EP3476325A1 (en) * | 2017-10-30 | 2019-05-01 | Ethicon LLC | Surgical suturing instrument configured to manipulate tissue using mechanical and electrical power |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US12062442B2 (en) | 2017-12-28 | 2024-08-13 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11100631B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Use of laser light and red-green-blue coloration to determine properties of back scattered light |
| US11659023B2 (en) | 2017-12-28 | 2023-05-23 | Cilag Gmbh International | Method of hub communication |
| US11234756B2 (en) | 2017-12-28 | 2022-02-01 | Cilag Gmbh International | Powered surgical tool with predefined adjustable control algorithm for controlling end effector parameter |
| US11903601B2 (en) | 2017-12-28 | 2024-02-20 | Cilag Gmbh International | Surgical instrument comprising a plurality of drive systems |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11304699B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11423007B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Adjustment of device control programs based on stratified contextual data in addition to the data |
| US11832840B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical instrument having a flexible circuit |
| US11410259B2 (en) | 2017-12-28 | 2022-08-09 | Cilag Gmbh International | Adaptive control program updates for surgical devices |
| US11160605B2 (en) | 2017-12-28 | 2021-11-02 | Cilag Gmbh International | Surgical evacuation sensing and motor control |
| US11324557B2 (en) | 2017-12-28 | 2022-05-10 | Cilag Gmbh International | Surgical instrument with a sensing array |
| US11266468B2 (en) | 2017-12-28 | 2022-03-08 | Cilag Gmbh International | Cooperative utilization of data derived from secondary sources by intelligent surgical hubs |
| US11291495B2 (en) | 2017-12-28 | 2022-04-05 | Cilag Gmbh International | Interruption of energy due to inadvertent capacitive coupling |
| US11069012B2 (en) | 2017-12-28 | 2021-07-20 | Cilag Gmbh International | Interactive surgical systems with condition handling of devices and data capabilities |
| US11672605B2 (en) | 2017-12-28 | 2023-06-13 | Cilag Gmbh International | Sterile field interactive control displays |
| US11308075B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical network, instrument, and cloud responses based on validation of received dataset and authentication of its source and integrity |
| US20190201139A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Communication arrangements for robot-assisted surgical platforms |
| US11304745B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Surgical evacuation sensing and display |
| US11844579B2 (en) | 2017-12-28 | 2023-12-19 | Cilag Gmbh International | Adjustments based on airborne particle properties |
| US11179175B2 (en) | 2017-12-28 | 2021-11-23 | Cilag Gmbh International | Controlling an ultrasonic surgical instrument according to tissue location |
| US11419630B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Surgical system distributed processing |
| US11937769B2 (en) | 2017-12-28 | 2024-03-26 | Cilag Gmbh International | Method of hub communication, processing, storage and display |
| US11969216B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Surgical network recommendations from real time analysis of procedure variables against a baseline highlighting differences from the optimal solution |
| US10695081B2 (en) | 2017-12-28 | 2020-06-30 | Ethicon Llc | Controlling a surgical instrument according to sensed closure parameters |
| US11464535B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Detection of end effector emersion in liquid |
| US11998193B2 (en) | 2017-12-28 | 2024-06-04 | Cilag Gmbh International | Method for usage of the shroud as an aspect of sensing or controlling a powered surgical device, and a control algorithm to adjust its default operation |
| US11771487B2 (en) | 2017-12-28 | 2023-10-03 | Cilag Gmbh International | Mechanisms for controlling different electromechanical systems of an electrosurgical instrument |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US10892899B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Self describing data packets generated at an issuing instrument |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11571234B2 (en) | 2017-12-28 | 2023-02-07 | Cilag Gmbh International | Temperature control of ultrasonic end effector and control system therefor |
| US11317937B2 (en) | 2018-03-08 | 2022-05-03 | Cilag Gmbh International | Determining the state of an ultrasonic end effector |
| US11045591B2 (en) | 2017-12-28 | 2021-06-29 | Cilag Gmbh International | Dual in-series large and small droplet filters |
| US10892995B2 (en) | 2017-12-28 | 2021-01-12 | Ethicon Llc | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11633237B2 (en) | 2017-12-28 | 2023-04-25 | Cilag Gmbh International | Usage and technique analysis of surgeon / staff performance against a baseline to optimize device utilization and performance for both current and future procedures |
| US11419667B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Ultrasonic energy device which varies pressure applied by clamp arm to provide threshold control pressure at a cut progression location |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11273001B2 (en) | 2017-12-28 | 2022-03-15 | Cilag Gmbh International | Surgical hub and modular device response adjustment based on situational awareness |
| US11424027B2 (en) | 2017-12-28 | 2022-08-23 | Cilag Gmbh International | Method for operating surgical instrument systems |
| US11278281B2 (en) | 2017-12-28 | 2022-03-22 | Cilag Gmbh International | Interactive surgical system |
| US11284936B2 (en) | 2017-12-28 | 2022-03-29 | Cilag Gmbh International | Surgical instrument having a flexible electrode |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11576677B2 (en) | 2017-12-28 | 2023-02-14 | Cilag Gmbh International | Method of hub communication, processing, display, and cloud analytics |
| US11179208B2 (en) | 2017-12-28 | 2021-11-23 | Cilag Gmbh International | Cloud-based medical analytics for security and authentication trends and reactive measures |
| US10944728B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Interactive surgical systems with encrypted communication capabilities |
| US11540855B2 (en) | 2017-12-28 | 2023-01-03 | Cilag Gmbh International | Controlling activation of an ultrasonic surgical instrument according to the presence of tissue |
| US11446052B2 (en) | 2017-12-28 | 2022-09-20 | Cilag Gmbh International | Variation of radio frequency and ultrasonic power level in cooperation with varying clamp arm pressure to achieve predefined heat flux or power applied to tissue |
| US11678881B2 (en) | 2017-12-28 | 2023-06-20 | Cilag Gmbh International | Spatial awareness of surgical hubs in operating rooms |
| US11529187B2 (en) | 2017-12-28 | 2022-12-20 | Cilag Gmbh International | Surgical evacuation sensor arrangements |
| US11202570B2 (en) | 2017-12-28 | 2021-12-21 | Cilag Gmbh International | Communication hub and storage device for storing parameters and status of a surgical device to be shared with cloud based analytics systems |
| US11304720B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Activation of energy devices |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US20190206569A1 (en) | 2017-12-28 | 2019-07-04 | Ethicon Llc | Method of cloud based data analytics for use with the hub |
| US11602393B2 (en) | 2017-12-28 | 2023-03-14 | Cilag Gmbh International | Surgical evacuation sensing and generator control |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US12035890B2 (en) | 2017-12-28 | 2024-07-16 | Cilag Gmbh International | Method of sensing particulate from smoke evacuated from a patient, adjusting the pump speed based on the sensed information, and communicating the functional parameters of the system to the hub |
| US11051876B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Surgical evacuation flow paths |
| US11696760B2 (en) | 2017-12-28 | 2023-07-11 | Cilag Gmbh International | Safety systems for smart powered surgical stapling |
| US10849697B2 (en) | 2017-12-28 | 2020-12-01 | Ethicon Llc | Cloud interface for coupled surgical devices |
| US11257589B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Real-time analysis of comprehensive cost of all instrumentation used in surgery utilizing data fluidity to track instruments through stocking and in-house processes |
| US11969142B2 (en) | 2017-12-28 | 2024-04-30 | Cilag Gmbh International | Method of compressing tissue within a stapling device and simultaneously displaying the location of the tissue within the jaws |
| US10755813B2 (en) | 2017-12-28 | 2020-08-25 | Ethicon Llc | Communication of smoke evacuation system parameters to hub or cloud in smoke evacuation module for interactive surgical platform |
| US11056244B2 (en) | 2017-12-28 | 2021-07-06 | Cilag Gmbh International | Automated data scaling, alignment, and organizing based on predefined parameters within surgical networks |
| US10943454B2 (en) | 2017-12-28 | 2021-03-09 | Ethicon Llc | Detection and escalation of security responses of surgical instruments to increasing severity threats |
| US11253315B2 (en) | 2017-12-28 | 2022-02-22 | Cilag Gmbh International | Increasing radio frequency to create pad-less monopolar loop |
| US11666331B2 (en) | 2017-12-28 | 2023-06-06 | Cilag Gmbh International | Systems for detecting proximity of surgical end effector to cancerous tissue |
| US11213359B2 (en) | 2017-12-28 | 2022-01-04 | Cilag Gmbh International | Controllers for robot-assisted surgical platforms |
| US10932872B2 (en) | 2017-12-28 | 2021-03-02 | Ethicon Llc | Cloud-based medical analytics for linking of local usage trends with the resource acquisition behaviors of larger data set |
| US11589888B2 (en) | 2017-12-28 | 2023-02-28 | Cilag Gmbh International | Method for controlling smart energy devices |
| US11304763B2 (en) | 2017-12-28 | 2022-04-19 | Cilag Gmbh International | Image capturing of the areas outside the abdomen to improve placement and control of a surgical device in use |
| US11147607B2 (en) | 2017-12-28 | 2021-10-19 | Cilag Gmbh International | Bipolar combination device that automatically adjusts pressure based on energy modality |
| US11376002B2 (en) | 2017-12-28 | 2022-07-05 | Cilag Gmbh International | Surgical instrument cartridge sensor assemblies |
| US11096693B2 (en) | 2017-12-28 | 2021-08-24 | Cilag Gmbh International | Adjustment of staple height of at least one row of staples based on the sensed tissue thickness or force in closing |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11076921B2 (en) | 2017-12-28 | 2021-08-03 | Cilag Gmbh International | Adaptive control program updates for surgical hubs |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11364075B2 (en) | 2017-12-28 | 2022-06-21 | Cilag Gmbh International | Radio frequency energy device for delivering combined electrical signals |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US11464559B2 (en) | 2017-12-28 | 2022-10-11 | Cilag Gmbh International | Estimating state of ultrasonic end effector and control system therefor |
| US10966791B2 (en) | 2017-12-28 | 2021-04-06 | Ethicon Llc | Cloud-based medical analytics for medical facility segmented individualization of instrument function |
| US11432885B2 (en) | 2017-12-28 | 2022-09-06 | Cilag Gmbh International | Sensing arrangements for robot-assisted surgical platforms |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US10987178B2 (en) | 2017-12-28 | 2021-04-27 | Ethicon Llc | Surgical hub control arrangements |
| US11311306B2 (en) | 2017-12-28 | 2022-04-26 | Cilag Gmbh International | Surgical systems for detecting end effector tissue distribution irregularities |
| US11559308B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method for smart energy device infrastructure |
| US11559307B2 (en) | 2017-12-28 | 2023-01-24 | Cilag Gmbh International | Method of robotic hub communication, detection, and control |
| US11786245B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Surgical systems with prioritized data transmission capabilities |
| WO2019136360A1 (en) | 2018-01-05 | 2019-07-11 | Board Of Regents Of The University Of Nebraska | Single-arm robotic device with compact joint design and related systems and methods |
| US11701162B2 (en) | 2018-03-08 | 2023-07-18 | Cilag Gmbh International | Smart blade application for reusable and disposable devices |
| US11259830B2 (en) | 2018-03-08 | 2022-03-01 | Cilag Gmbh International | Methods for controlling temperature in ultrasonic device |
| US11389188B2 (en) | 2018-03-08 | 2022-07-19 | Cilag Gmbh International | Start temperature of blade |
| US10973520B2 (en) | 2018-03-28 | 2021-04-13 | Ethicon Llc | Surgical staple cartridge with firing member driven camming assembly that has an onboard tissue cutting feature |
| US11406382B2 (en) | 2018-03-28 | 2022-08-09 | Cilag Gmbh International | Staple cartridge comprising a lockout key configured to lift a firing member |
| US11278280B2 (en) | 2018-03-28 | 2022-03-22 | Cilag Gmbh International | Surgical instrument comprising a jaw closure lockout |
| US11219453B2 (en) | 2018-03-28 | 2022-01-11 | Cilag Gmbh International | Surgical stapling devices with cartridge compatible closure and firing lockout arrangements |
| US11207067B2 (en) | 2018-03-28 | 2021-12-28 | Cilag Gmbh International | Surgical stapling device with separate rotary driven closure and firing systems and firing member that engages both jaws while firing |
| US11259806B2 (en) | 2018-03-28 | 2022-03-01 | Cilag Gmbh International | Surgical stapling devices with features for blocking advancement of a camming assembly of an incompatible cartridge installed therein |
| US11471156B2 (en) | 2018-03-28 | 2022-10-18 | Cilag Gmbh International | Surgical stapling devices with improved rotary driven closure systems |
| US11096688B2 (en) | 2018-03-28 | 2021-08-24 | Cilag Gmbh International | Rotary driven firing members with different anvil and channel engagement features |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| KR102129168B1 (ko) * | 2018-05-31 | 2020-07-01 | 전자부품연구원 | 직접 감쇄 모델을 이용한 내시경 영상 스테레오 정합 방법 및 장치 |
| US20210345862A1 (en) * | 2018-08-27 | 2021-11-11 | Drive Medical, Inc. | Devices and systems for body cavities and methods of use |
| KR20220038806A (ko) | 2018-09-25 | 2022-03-29 | 미라키 이노베이션 씽크 탱크 엘엘씨 | 의료용 스캐폴드 체내 로봇 이미징, 감지 및 배치 장치 및 사용 방법 |
| EP3628259A1 (en) * | 2018-09-28 | 2020-04-01 | Artedrone | Medical device and method for performing a surgical operation in a body |
| US10959751B2 (en) * | 2018-11-07 | 2021-03-30 | Warren Z McCarthy | Piezoelectric thrombus removal |
| US20220023096A1 (en) | 2018-12-05 | 2022-01-27 | Medical Instrument Development Laboratories, Inc. | Vitrectomy probe including tissue manipulation features and method of manufacturing a vitrectomy probe |
| CN114302665A (zh) | 2019-01-07 | 2022-04-08 | 虚拟切割有限公司 | 机器人辅助手术系统以及相关装置和方法 |
| US11369377B2 (en) | 2019-02-19 | 2022-06-28 | Cilag Gmbh International | Surgical stapling assembly with cartridge based retainer configured to unlock a firing lockout |
| US11751872B2 (en) | 2019-02-19 | 2023-09-12 | Cilag Gmbh International | Insertable deactivator element for surgical stapler lockouts |
| US11357503B2 (en) | 2019-02-19 | 2022-06-14 | Cilag Gmbh International | Staple cartridge retainers with frangible retention features and methods of using same |
| US11317915B2 (en) | 2019-02-19 | 2022-05-03 | Cilag Gmbh International | Universal cartridge based key feature that unlocks multiple lockout arrangements in different surgical staplers |
| US11291445B2 (en) | 2019-02-19 | 2022-04-05 | Cilag Gmbh International | Surgical staple cartridges with integral authentication keys |
| US12090629B2 (en) * | 2019-04-16 | 2024-09-17 | University Of Louisville Research Foundation, Inc. | Adaptive robotic nursing assistant |
| USD964564S1 (en) | 2019-06-25 | 2022-09-20 | Cilag Gmbh International | Surgical staple cartridge retainer with a closure system authentication key |
| USD952144S1 (en) | 2019-06-25 | 2022-05-17 | Cilag Gmbh International | Surgical staple cartridge retainer with firing system authentication key |
| USD950728S1 (en) | 2019-06-25 | 2022-05-03 | Cilag Gmbh International | Surgical staple cartridge |
| CN110450191B (zh) * | 2019-08-22 | 2020-10-09 | 哈尔滨工业大学 | 一种自生长软体机器人顶端携带摄像机装置 |
| US11433959B2 (en) | 2019-08-28 | 2022-09-06 | California Institute Of Technology | Four-wheeled articulated steering vehicle system |
| US11958183B2 (en) | 2019-09-19 | 2024-04-16 | The Research Foundation For The State University Of New York | Negotiation-based human-robot collaboration via augmented reality |
| AU2020353685A1 (en) * | 2019-09-26 | 2022-04-14 | Miraki Innovation Think Tank, Llc | Miniaturized intra-body controllable medical device |
| US10906180B1 (en) * | 2020-01-30 | 2021-02-02 | 123IV, Inc. | Monitoring and maintaining an intravenous assembly without medical staff involvement for safe distancing enforcement |
| JP2023520017A (ja) | 2020-04-01 | 2023-05-15 | サ-コス コーポレイション | 非生物学的な可動の空中ターゲットの早期検出のためのシステムおよび方法 |
| WO2021198717A1 (en) | 2020-04-01 | 2021-10-07 | Artedrone | A medical device, a method for controlling a device, and a system comprising a device |
| KR102433707B1 (ko) * | 2020-09-02 | 2022-08-22 | 윤삼열 | 수술용 보조로봇 |
| CN117460550A (zh) * | 2021-06-10 | 2024-01-26 | 贝克顿·迪金森公司 | 药物输送系统、贴片泵和药物输送装置 |
| US11278303B1 (en) | 2021-07-29 | 2022-03-22 | Vita Solutions LLC | Minimally invasive surgical devices, systems, and methods |
| KR20240038911A (ko) * | 2021-08-06 | 2024-03-26 | 주식회사 리브스메드 | 수술용 로봇 암 |
| US11957342B2 (en) | 2021-11-01 | 2024-04-16 | Cilag Gmbh International | Devices, systems, and methods for detecting tissue and foreign objects during a surgical operation |
| WO2023141259A1 (en) * | 2022-01-20 | 2023-07-27 | CO6, Inc. | A wheeled robot and related methods |
Family Cites Families (406)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US444555A (en) * | 1891-01-13 | Mechanism for operating stuff-gates | ||
| US3870264A (en) * | 1973-03-26 | 1975-03-11 | William I Robinson | Stand |
| DE2339827B2 (de) | 1973-08-06 | 1977-02-24 | A6 In 3-02 | Zahnaerztliches geraet |
| US4258716A (en) | 1978-02-06 | 1981-03-31 | The University Of Melbourne | Microsurgical instruments |
| JPS5519124A (en) | 1978-07-27 | 1980-02-09 | Olympus Optical Co | Camera system for medical treatment |
| US4246661A (en) | 1979-03-15 | 1981-01-27 | The Boeing Company | Digitally-controlled artificial hand |
| JPS58132490A (ja) * | 1982-01-29 | 1983-08-06 | 株式会社日立製作所 | 角度伝達機構 |
| US5307447A (en) * | 1982-10-29 | 1994-04-26 | Kabushiki Kaisha Toshiba | Control system of multi-joint arm robot apparatus |
| GB2130889B (en) | 1982-11-26 | 1986-06-18 | Wolf Gmbh Richard | Rectoscope |
| JPS6076986A (ja) | 1983-09-30 | 1985-05-01 | 株式会社東芝 | ロボツト |
| DE3536747A1 (de) | 1984-10-15 | 1986-04-24 | Tokico Ltd., Kawasaki, Kanagawa | Gelenkmechanismus |
| DE3525806A1 (de) | 1985-07-19 | 1987-01-29 | Kuka Schweissanlagen & Roboter | Getriebekopf fuer manipulatoren |
| JPS6268293A (ja) | 1985-09-20 | 1987-03-28 | 株式会社明電舎 | マニピユレ−タ肩機構 |
| DE3545068A1 (de) | 1985-12-19 | 1987-06-25 | Kuka Schweissanlagen & Roboter | Getriebekopf fuer manipulatoren |
| DE3612498A1 (de) | 1986-04-14 | 1987-10-29 | Norske Stats Oljeselskap | Selbstfahrendes fahrzeug fuer rohrleitungen |
| JP2591968B2 (ja) | 1987-12-28 | 1997-03-19 | 株式会社日立製作所 | 産業用ロボットの手首 |
| US5019968A (en) * | 1988-03-29 | 1991-05-28 | Yulan Wang | Three-dimensional vector processor |
| US5187796A (en) * | 1988-03-29 | 1993-02-16 | Computer Motion, Inc. | Three-dimensional vector co-processor having I, J, and K register files and I, J, and K execution units |
| US5108140A (en) | 1988-04-18 | 1992-04-28 | Odetics, Inc. | Reconfigurable end effector |
| US4896015A (en) * | 1988-07-29 | 1990-01-23 | Refractive Laser Research & Development Program, Ltd. | Laser delivery system |
| US4897014A (en) | 1988-09-06 | 1990-01-30 | Harbor Branch Oceanographic Institution, Inc. | Device for interchange of tools |
| US5271384A (en) | 1989-09-01 | 1993-12-21 | Mcewen James A | Powered surgical retractor |
| US5201325A (en) * | 1989-09-01 | 1993-04-13 | Andronic Devices Ltd. | Advanced surgical retractor |
| US5562448A (en) | 1990-04-10 | 1996-10-08 | Mushabac; David R. | Method for facilitating dental diagnosis and treatment |
| JP2914388B2 (ja) * | 1990-04-17 | 1999-06-28 | 株式会社ユアサコーポレーション | 高分子固体電解質 |
| IT1241622B (it) * | 1990-10-04 | 1994-01-25 | Comau Spa | Polso di robot |
| IT1241621B (it) | 1990-10-04 | 1994-01-25 | Comau Spa | Robot articolato |
| US5176649A (en) * | 1991-01-28 | 1993-01-05 | Akio Wakabayashi | Insertion device for use with curved, rigid endoscopic instruments and the like |
| US5217003A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| US5172639A (en) | 1991-03-26 | 1992-12-22 | Gas Research Institute | Cornering pipe traveler |
| US5370134A (en) | 1991-05-29 | 1994-12-06 | Orgin Medsystems, Inc. | Method and apparatus for body structure manipulation and dissection |
| EP0637223B1 (en) | 1991-05-29 | 1998-07-22 | Origin Medsystems, Inc. | Retraction apparatus for endoscopic surgery |
| US5632761A (en) | 1991-05-29 | 1997-05-27 | Origin Medsystems, Inc. | Inflatable devices for separating layers of tissue, and methods of using |
| US5417210A (en) | 1992-05-27 | 1995-05-23 | International Business Machines Corporation | System and method for augmentation of endoscopic surgery |
| US5284096A (en) * | 1991-08-06 | 1994-02-08 | Osaka Gas Company, Limited | Vehicle for use in pipes |
| US5674030A (en) | 1991-08-27 | 1997-10-07 | Sika Equipment Ag. | Device and method for repairing building branch lines in inacessible sewer mains |
| JP2526537B2 (ja) * | 1991-08-30 | 1996-08-21 | 日本電装株式会社 | 配管内エネルギ―供給システム |
| JPH05115425A (ja) | 1991-10-25 | 1993-05-14 | Olympus Optical Co Ltd | 内視鏡 |
| US5631973A (en) | 1994-05-05 | 1997-05-20 | Sri International | Method for telemanipulation with telepresence |
| DE69332914T2 (de) | 1992-01-21 | 2004-02-26 | Sri International, Menlo Park | Chirurgisches System |
| US6731988B1 (en) | 1992-01-21 | 2004-05-04 | Sri International | System and method for remote endoscopic surgery |
| US5624380A (en) | 1992-03-12 | 1997-04-29 | Olympus Optical Co., Ltd. | Multi-degree of freedom manipulator |
| US5263382A (en) | 1992-04-13 | 1993-11-23 | Hughes Aircraft Company | Six Degrees of freedom motion device |
| US5297443A (en) * | 1992-07-07 | 1994-03-29 | Wentz John D | Flexible positioning appendage |
| CA2074318A1 (en) * | 1992-07-22 | 1994-01-23 | Morteza Shirkhanzadeh | Prosthetic implant with self-generated current for early fixation in skeletal bone |
| US5524180A (en) | 1992-08-10 | 1996-06-04 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5762458A (en) | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US5754741A (en) | 1992-08-10 | 1998-05-19 | Computer Motion, Inc. | Automated endoscope for optimal positioning |
| US7074179B2 (en) | 1992-08-10 | 2006-07-11 | Intuitive Surgical Inc | Method and apparatus for performing minimally invasive cardiac procedures |
| US5657429A (en) | 1992-08-10 | 1997-08-12 | Computer Motion, Inc. | Automated endoscope system optimal positioning |
| US5515478A (en) | 1992-08-10 | 1996-05-07 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5588442A (en) | 1992-08-12 | 1996-12-31 | Scimed Life Systems, Inc. | Shaft movement control apparatus and method |
| US5297536A (en) | 1992-08-25 | 1994-03-29 | Wilk Peter J | Method for use in intra-abdominal surgery |
| US5458131A (en) | 1992-08-25 | 1995-10-17 | Wilk; Peter J. | Method for use in intra-abdominal surgery |
| US5769640A (en) | 1992-12-02 | 1998-06-23 | Cybernet Systems Corporation | Method and system for simulating medical procedures including virtual reality and control method and system for use therein |
| US5353807A (en) | 1992-12-07 | 1994-10-11 | Demarco Thomas J | Magnetically guidable intubation device |
| CA2112271A1 (en) * | 1992-12-28 | 1994-06-29 | Kiichi Suyama | Intrapipe work robot apparatus and method of measuring position of intrapipe work robot |
| CA2151259C (en) | 1993-01-07 | 2008-04-01 | Gwyn F. Mcneely | Gastrostomy catheter system |
| US6346074B1 (en) | 1993-02-22 | 2002-02-12 | Heartport, Inc. | Devices for less invasive intracardiac interventions |
| US5738821A (en) * | 1993-03-23 | 1998-04-14 | Lockheed Martin Energy Research Corporation | Nozzle for electric dispersion reactor |
| US6832996B2 (en) * | 1995-06-07 | 2004-12-21 | Arthrocare Corporation | Electrosurgical systems and methods for treating tissue |
| US5363935A (en) * | 1993-05-14 | 1994-11-15 | Carnegie Mellon University | Reconfigurable mobile vehicle with magnetic tracks |
| US5791231A (en) * | 1993-05-17 | 1998-08-11 | Endorobotics Corporation | Surgical robotic system and hydraulic actuator therefor |
| US5441494A (en) | 1993-07-29 | 1995-08-15 | Ethicon, Inc. | Manipulable hand for laparoscopy |
| US5382885A (en) * | 1993-08-09 | 1995-01-17 | The University Of British Columbia | Motion scaling tele-operating system with force feedback suitable for microsurgery |
| US5728599A (en) * | 1993-10-28 | 1998-03-17 | Lsi Logic Corporation | Printable superconductive leadframes for semiconductor device assembly |
| JP3476878B2 (ja) | 1993-11-15 | 2003-12-10 | オリンパス株式会社 | 手術用マニピュレータ |
| US5876325A (en) | 1993-11-02 | 1999-03-02 | Olympus Optical Co., Ltd. | Surgical manipulation system |
| US5458598A (en) | 1993-12-02 | 1995-10-17 | Cabot Technology Corporation | Cutting and coagulating forceps |
| WO1995016396A1 (en) | 1993-12-15 | 1995-06-22 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5436542A (en) | 1994-01-28 | 1995-07-25 | Surgix, Inc. | Telescopic camera mount with remotely controlled positioning |
| US5471515A (en) | 1994-01-28 | 1995-11-28 | California Institute Of Technology | Active pixel sensor with intra-pixel charge transfer |
| JP3226710B2 (ja) | 1994-05-10 | 2001-11-05 | 株式会社東芝 | 検査用画像処理装置及び方式 |
| US5620417A (en) * | 1994-07-07 | 1997-04-15 | Cardiovascular Imaging Systems Incorporated | Rapid exchange delivery catheter |
| US5623582A (en) | 1994-07-14 | 1997-04-22 | Immersion Human Interface Corporation | Computer interface or control input device for laparoscopic surgical instrument and other elongated mechanical objects |
| US7053752B2 (en) | 1996-08-06 | 2006-05-30 | Intuitive Surgical | General purpose distributed operating room control system |
| US6463361B1 (en) | 1994-09-22 | 2002-10-08 | Computer Motion, Inc. | Speech interface for an automated endoscopic system |
| US6646541B1 (en) | 1996-06-24 | 2003-11-11 | Computer Motion, Inc. | General purpose distributed operating room control system |
| US5797538A (en) | 1994-10-05 | 1998-08-25 | United States Surgical Corporation | Articulating apparatus for applying surgical fasteners to body tissue |
| US5653705A (en) | 1994-10-07 | 1997-08-05 | General Surgical Innovations, Inc. | Laparoscopic access port for surgical instruments or the hand |
| US6071274A (en) | 1996-12-19 | 2000-06-06 | Ep Technologies, Inc. | Loop structures for supporting multiple electrode elements |
| US5672168A (en) | 1994-10-07 | 1997-09-30 | De La Torre; Roger A. | Laparoscopic access port for surgical instruments or the hand |
| US5645520A (en) | 1994-10-12 | 1997-07-08 | Computer Motion, Inc. | Shape memory alloy actuated rod for endoscopic instruments |
| US5814062A (en) | 1994-12-22 | 1998-09-29 | Target Therapeutics, Inc. | Implant delivery assembly with expandable coupling/decoupling mechanism |
| JP3610110B2 (ja) | 1995-02-23 | 2005-01-12 | オリンパス株式会社 | 医療用マニピュレータ |
| GB2301187B (en) * | 1995-05-22 | 1999-04-21 | British Gas Plc | Method of and apparatus for locating an anomaly in a duct |
| US5724989A (en) * | 1995-06-20 | 1998-03-10 | The Microspring Company, Inc. | Radiopaque medical devices |
| US5657584A (en) | 1995-07-24 | 1997-08-19 | Rensselaer Polytechnic Institute | Concentric joint mechanism |
| US6714841B1 (en) * | 1995-09-15 | 2004-03-30 | Computer Motion, Inc. | Head cursor control interface for an automated endoscope system for optimal positioning |
| US5825982A (en) | 1995-09-15 | 1998-10-20 | Wright; James | Head cursor control interface for an automated endoscope system for optimal positioning |
| US6283951B1 (en) * | 1996-10-11 | 2001-09-04 | Transvascular, Inc. | Systems and methods for delivering drugs to selected locations within the body |
| US5624398A (en) | 1996-02-08 | 1997-04-29 | Symbiosis Corporation | Endoscopic robotic surgical tools and methods |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6699177B1 (en) * | 1996-02-20 | 2004-03-02 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US5971976A (en) | 1996-02-20 | 1999-10-26 | Computer Motion, Inc. | Motion minimization and compensation system for use in surgical procedures |
| US6063095A (en) | 1996-02-20 | 2000-05-16 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US6436107B1 (en) | 1996-02-20 | 2002-08-20 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US5895417A (en) | 1996-03-06 | 1999-04-20 | Cardiac Pathways Corporation | Deflectable loop design for a linear lesion ablation apparatus |
| US6652480B1 (en) | 1997-03-06 | 2003-11-25 | Medtronic Ave., Inc. | Methods for reducing distal embolization |
| US5792135A (en) * | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5797900A (en) | 1996-05-20 | 1998-08-25 | Intuitive Surgical, Inc. | Wrist mechanism for surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5807377A (en) | 1996-05-20 | 1998-09-15 | Intuitive Surgical, Inc. | Force-reflecting surgical instrument and positioning mechanism for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US6544276B1 (en) * | 1996-05-20 | 2003-04-08 | Medtronic Ave. Inc. | Exchange method for emboli containment |
| US6911916B1 (en) | 1996-06-24 | 2005-06-28 | The Cleveland Clinic Foundation | Method and apparatus for accessing medical data over a network |
| US6496099B2 (en) | 1996-06-24 | 2002-12-17 | Computer Motion, Inc. | General purpose distributed operating room control system |
| US6642836B1 (en) | 1996-08-06 | 2003-11-04 | Computer Motion, Inc. | General purpose distributed operating room control system |
| US6364888B1 (en) | 1996-09-09 | 2002-04-02 | Intuitive Surgical, Inc. | Alignment of master and slave in a minimally invasive surgical apparatus |
| US6520951B1 (en) * | 1996-09-13 | 2003-02-18 | Scimed Life Systems, Inc. | Rapid exchange catheter with detachable hood |
| IT1285533B1 (it) | 1996-10-22 | 1998-06-08 | Scuola Superiore Di Studi Universitari E Di Perfezionamento Sant Anna | Robot endoscopico |
| US6293282B1 (en) | 1996-11-05 | 2001-09-25 | Jerome Lemelson | System and method for treating select tissue in living being |
| US6058323A (en) | 1996-11-05 | 2000-05-02 | Lemelson; Jerome | System and method for treating select tissue in a living being |
| US6286514B1 (en) | 1996-11-05 | 2001-09-11 | Jerome Lemelson | System and method for treating select tissue in a living being |
| US5845646A (en) | 1996-11-05 | 1998-12-08 | Lemelson; Jerome | System and method for treating select tissue in a living being |
| US6132441A (en) | 1996-11-22 | 2000-10-17 | Computer Motion, Inc. | Rigidly-linked articulating wrist with decoupled motion transmission |
| US5993467A (en) | 1996-11-27 | 1999-11-30 | Yoon; Inbae | Suturing instrument with rotatably mounted spreadable needle holder |
| US6331181B1 (en) * | 1998-12-08 | 2001-12-18 | Intuitive Surgical, Inc. | Surgical robotic tools, data architecture, and use |
| US6132368A (en) * | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US6332880B1 (en) | 1996-12-19 | 2001-12-25 | Ep Technologies, Inc. | Loop structures for supporting multiple electrode elements |
| US5910129A (en) | 1996-12-19 | 1999-06-08 | Ep Technologies, Inc. | Catheter distal assembly with pull wires |
| US6182171B1 (en) * | 1997-06-06 | 2001-01-30 | Nissan Motor Co., Ltd. | Information communication system and method applicable to in-vehicle networking architecture |
| US6066090A (en) | 1997-06-19 | 2000-05-23 | Yoon; Inbae | Branched endoscope system |
| ATE253111T1 (de) | 1997-08-20 | 2003-11-15 | Univ California | Für den capsaicin rezeptor kodierende nukleinsäuresequenzen und dem capsaicin rezeptor ähnliche polypeptide und ihre verwendung |
| US6714839B2 (en) * | 1998-12-08 | 2004-03-30 | Intuitive Surgical, Inc. | Master having redundant degrees of freedom |
| US6139563A (en) | 1997-09-25 | 2000-10-31 | Allegiance Corporation | Surgical device with malleable shaft |
| JP3342021B2 (ja) | 1997-10-17 | 2002-11-05 | サーコン コーポレーション | 組織を貫通する医療機器システム |
| US6240312B1 (en) | 1997-10-23 | 2001-05-29 | Robert R. Alfano | Remote-controllable, micro-scale device for use in in vivo medical diagnosis and/or treatment |
| FR2771280B1 (fr) | 1997-11-26 | 2001-01-26 | Albert P Alby | Dispositif de liaison vertebrale resilient |
| US7090683B2 (en) | 1998-02-24 | 2006-08-15 | Hansen Medical, Inc. | Flexible instrument |
| US7371210B2 (en) * | 1998-02-24 | 2008-05-13 | Hansen Medical, Inc. | Flexible instrument |
| US6810281B2 (en) | 2000-12-21 | 2004-10-26 | Endovia Medical, Inc. | Medical mapping system |
| US6692485B1 (en) * | 1998-02-24 | 2004-02-17 | Endovia Medical, Inc. | Articulated apparatus for telemanipulator system |
| US20020087148A1 (en) | 1998-02-24 | 2002-07-04 | Brock David L. | Flexible instrument |
| IL139402A0 (en) | 1998-05-15 | 2001-11-25 | Geso Ges Fur Sensorik Geotechn | Method and device for monitoring temperature distributions on the basis of distributed fiber-optic sensing and use of same |
| US6309403B1 (en) | 1998-06-01 | 2001-10-30 | Board Of Trustees Operating Michigan State University | Dexterous articulated linkage for surgical applications |
| USD441078S1 (en) * | 1998-06-02 | 2001-04-24 | Hunter A. McKay | Disposable medical instrument for performing retropubic urethropexy |
| US6030365A (en) | 1998-06-10 | 2000-02-29 | Laufer; Michael D. | Minimally invasive sterile surgical access device and method |
| US6352503B1 (en) * | 1998-07-17 | 2002-03-05 | Olympus Optical Co., Ltd. | Endoscopic surgery apparatus |
| EP1109497B1 (en) | 1998-08-04 | 2009-05-06 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| US6659939B2 (en) | 1998-11-20 | 2003-12-09 | Intuitive Surgical, Inc. | Cooperative minimally invasive telesurgical system |
| US6951535B2 (en) | 2002-01-16 | 2005-10-04 | Intuitive Surgical, Inc. | Tele-medicine system that transmits an entire state of a subsystem |
| US6459926B1 (en) | 1998-11-20 | 2002-10-01 | Intuitive Surgical, Inc. | Repositioning and reorientation of master/slave relationship in minimally invasive telesurgery |
| US6554790B1 (en) | 1998-11-20 | 2003-04-29 | Intuitive Surgical, Inc. | Cardiopulmonary bypass device and method |
| US6852107B2 (en) * | 2002-01-16 | 2005-02-08 | Computer Motion, Inc. | Minimally invasive surgical training using robotics and tele-collaboration |
| US6398726B1 (en) | 1998-11-20 | 2002-06-04 | Intuitive Surgical, Inc. | Stabilizer for robotic beating-heart surgery |
| US6468265B1 (en) | 1998-11-20 | 2002-10-22 | Intuitive Surgical, Inc. | Performing cardiac surgery without cardioplegia |
| US6162171A (en) | 1998-12-07 | 2000-12-19 | Wan Sing Ng | Robotic endoscope and an autonomous pipe robot for performing endoscopic procedures |
| USD441862S1 (en) | 1998-12-08 | 2001-05-08 | Intuitive Surgical, Inc. | Portion of an interface for a medical instrument |
| US7125403B2 (en) | 1998-12-08 | 2006-10-24 | Intuitive Surgical | In vivo accessories for minimally invasive robotic surgery |
| US6799065B1 (en) | 1998-12-08 | 2004-09-28 | Intuitive Surgical, Inc. | Image shifting apparatus and method for a telerobotic system |
| US6309397B1 (en) | 1999-12-02 | 2001-10-30 | Sri International | Accessories for minimally invasive robotic surgery and methods |
| US6493608B1 (en) | 1999-04-07 | 2002-12-10 | Intuitive Surgical, Inc. | Aspects of a control system of a minimally invasive surgical apparatus |
| US6720988B1 (en) | 1998-12-08 | 2004-04-13 | Intuitive Surgical, Inc. | Stereo imaging system and method for use in telerobotic systems |
| US6522906B1 (en) | 1998-12-08 | 2003-02-18 | Intuitive Surgical, Inc. | Devices and methods for presenting and regulating auxiliary information on an image display of a telesurgical system to assist an operator in performing a surgical procedure |
| US6770081B1 (en) | 2000-01-07 | 2004-08-03 | Intuitive Surgical, Inc. | In vivo accessories for minimally invasive robotic surgery and methods |
| USD444555S1 (en) | 1998-12-08 | 2001-07-03 | Intuitive Surgical, Inc. | Interface for a medical instrument |
| US6620173B2 (en) | 1998-12-08 | 2003-09-16 | Intuitive Surgical, Inc. | Method for introducing an end effector to a surgical site in minimally invasive surgery |
| USD441076S1 (en) * | 1998-12-08 | 2001-04-24 | Intuitive Surgical, Inc. | Adaptor for a medical instrument |
| USD438617S1 (en) * | 1998-12-08 | 2001-03-06 | Intuitive Surgical, Inc. | Portion of an adaptor for a medical instrument |
| US6451027B1 (en) | 1998-12-16 | 2002-09-17 | Intuitive Surgical, Inc. | Devices and methods for moving an image capture device in telesurgical systems |
| US6394998B1 (en) | 1999-01-22 | 2002-05-28 | Intuitive Surgical, Inc. | Surgical tools for use in minimally invasive telesurgical applications |
| US8636648B2 (en) | 1999-03-01 | 2014-01-28 | West View Research, Llc | Endoscopic smart probe |
| US6159146A (en) | 1999-03-12 | 2000-12-12 | El Gazayerli; Mohamed Mounir | Method and apparatus for minimally-invasive fundoplication |
| US6464655B1 (en) * | 1999-03-17 | 2002-10-15 | Environmental Robots, Inc. | Electrically-controllable multi-fingered resilient heart compression devices |
| US6565554B1 (en) | 1999-04-07 | 2003-05-20 | Intuitive Surgical, Inc. | Friction compensation in a minimally invasive surgical apparatus |
| US6594552B1 (en) | 1999-04-07 | 2003-07-15 | Intuitive Surgical, Inc. | Grip strength with tactile feedback for robotic surgery |
| US6424885B1 (en) | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US6820653B1 (en) | 1999-04-12 | 2004-11-23 | Carnegie Mellon University | Pipe inspection and repair system |
| US6292678B1 (en) | 1999-05-13 | 2001-09-18 | Stereotaxis, Inc. | Method of magnetically navigating medical devices with magnetic fields and gradients, and medical devices adapted therefor |
| US7637905B2 (en) | 2003-01-15 | 2009-12-29 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| US6788018B1 (en) | 1999-08-03 | 2004-09-07 | Intuitive Surgical, Inc. | Ceiling and floor mounted surgical robot set-up arms |
| US6524164B1 (en) * | 1999-09-14 | 2003-02-25 | Applied Materials, Inc. | Polishing pad with transparent window having reduced window leakage for a chemical mechanical polishing apparatus |
| US6454775B1 (en) | 1999-12-06 | 2002-09-24 | Bacchus Vascular Inc. | Systems and methods for clot disruption and retrieval |
| US6661571B1 (en) | 1999-09-21 | 2003-12-09 | Olympus Optical Co., Ltd. | Surgical microscopic system |
| US7217240B2 (en) | 1999-10-01 | 2007-05-15 | Intuitive Surgical, Inc. | Heart stabilizer |
| US6936001B1 (en) | 1999-10-01 | 2005-08-30 | Computer Motion, Inc. | Heart stabilizer |
| US6817972B2 (en) | 1999-10-01 | 2004-11-16 | Computer Motion, Inc. | Heart stabilizer |
| JP3454235B2 (ja) * | 1999-10-06 | 2003-10-06 | 株式会社日立製作所 | 生体磁場計測装置 |
| US6206903B1 (en) * | 1999-10-08 | 2001-03-27 | Intuitive Surgical, Inc. | Surgical tool with mechanical advantage |
| US6312435B1 (en) | 1999-10-08 | 2001-11-06 | Intuitive Surgical, Inc. | Surgical instrument with extended reach for use in minimally invasive surgery |
| US6491691B1 (en) | 1999-10-08 | 2002-12-10 | Intuitive Surgical, Inc. | Minimally invasive surgical hook apparatus and method for using same |
| JP3326472B2 (ja) | 1999-11-10 | 2002-09-24 | 独立行政法人 航空宇宙技術研究所 | 多関節ロボット |
| US6702805B1 (en) | 1999-11-12 | 2004-03-09 | Microdexterity Systems, Inc. | Manipulator |
| US6548982B1 (en) | 1999-11-19 | 2003-04-15 | Regents Of The University Of Minnesota | Miniature robotic vehicles and methods of controlling same |
| US6591239B1 (en) | 1999-12-09 | 2003-07-08 | Steris Inc. | Voice controlled surgical suite |
| US6817975B1 (en) | 2000-01-14 | 2004-11-16 | Intuitive Surgical, Inc. | Endoscope |
| WO2001054568A1 (en) | 2000-01-27 | 2001-08-02 | Sterilis, Inc. | Cavity enlarger method and apparatus |
| US7039453B2 (en) | 2000-02-08 | 2006-05-02 | Tarun Mullick | Miniature ingestible capsule |
| US6428539B1 (en) | 2000-03-09 | 2002-08-06 | Origin Medsystems, Inc. | Apparatus and method for minimally invasive surgery using rotational cutting tool |
| AU2001249308A1 (en) | 2000-03-24 | 2001-10-15 | Johns Hopkins University | Peritoneal cavity device and method |
| US6468203B2 (en) | 2000-04-03 | 2002-10-22 | Neoguide Systems, Inc. | Steerable endoscope and improved method of insertion |
| US6610007B2 (en) | 2000-04-03 | 2003-08-26 | Neoguide Systems, Inc. | Steerable segmented endoscope and method of insertion |
| US6837846B2 (en) | 2000-04-03 | 2005-01-04 | Neo Guide Systems, Inc. | Endoscope having a guide tube |
| US6974411B2 (en) | 2000-04-03 | 2005-12-13 | Neoguide Systems, Inc. | Endoscope with single step guiding apparatus |
| US6984203B2 (en) * | 2000-04-03 | 2006-01-10 | Neoguide Systems, Inc. | Endoscope with adjacently positioned guiding apparatus |
| US6508413B2 (en) * | 2000-04-06 | 2003-01-21 | Siemens Westinghouse Power Corporation | Remote spray coating of nuclear cross-under piping |
| US6450104B1 (en) | 2000-04-28 | 2002-09-17 | North Carolina State University | Modular observation crawler and sensing instrument and method for operating same |
| DE10025285A1 (de) | 2000-05-22 | 2001-12-06 | Siemens Ag | Vollautomatische, robotergestützte Kameraführung unter Verwendung von Positionssensoren für laparoskopische Eingriffe |
| US6645196B1 (en) | 2000-06-16 | 2003-11-11 | Intuitive Surgical, Inc. | Guided tool change |
| FR2812067B1 (fr) | 2000-07-18 | 2003-05-16 | Commissariat Energie Atomique | Robot mobile apte a travailler dans des tuyaux ou d'autres passages etroits |
| US6746443B1 (en) | 2000-07-27 | 2004-06-08 | Intuitive Surgical Inc. | Roll-pitch-roll surgical tool |
| US6902560B1 (en) | 2000-07-27 | 2005-06-07 | Intuitive Surgical, Inc. | Roll-pitch-roll surgical tool |
| US6726699B1 (en) | 2000-08-15 | 2004-04-27 | Computer Motion, Inc. | Instrument guide |
| US6860877B1 (en) | 2000-09-29 | 2005-03-01 | Computer Motion, Inc. | Heart stabilizer support arm |
| US6475215B1 (en) | 2000-10-12 | 2002-11-05 | Naim Erturk Tanrisever | Quantum energy surgical device and method |
| JP3996057B2 (ja) | 2000-11-27 | 2007-10-24 | タイコ ヘルスケア グループ リミテッド パートナーシップ | 組織取出し器具 |
| EP2441394B1 (en) | 2000-11-28 | 2017-04-05 | Intuitive Surgical Operations, Inc. | Irrigator for an endoscopic instrument |
| JP3914155B2 (ja) | 2000-12-06 | 2007-05-16 | 本田技研工業株式会社 | 多指ハンド装置 |
| JP4655175B2 (ja) | 2000-12-19 | 2011-03-23 | ソニー株式会社 | マニピュレータシステム、マスタマニピュレータ、スレーブマニピュレータ及びそれらの制御方法、並びに記録媒体 |
| US6840938B1 (en) * | 2000-12-29 | 2005-01-11 | Intuitive Surgical, Inc. | Bipolar cauterizing instrument |
| US6934589B2 (en) | 2000-12-29 | 2005-08-23 | Medtronic, Inc. | System and method for placing endocardial leads |
| US7519421B2 (en) | 2001-01-16 | 2009-04-14 | Kenergy, Inc. | Vagal nerve stimulation using vascular implanted devices for treatment of atrial fibrillation |
| KR100380181B1 (ko) * | 2001-02-10 | 2003-04-11 | 한국과학기술연구원 | 대장 검사용 마이크로 로봇 |
| US6871563B2 (en) | 2001-02-26 | 2005-03-29 | Howie Choset | Orientation preserving angular swivel joint |
| WO2002070943A2 (en) * | 2001-03-07 | 2002-09-12 | Carnegie Mellon University | Gas main robotic inspection system |
| US6512345B2 (en) * | 2001-03-30 | 2003-01-28 | The Regents Of The University Of Michigan | Apparatus for obstacle traversion |
| US6870343B2 (en) * | 2001-03-30 | 2005-03-22 | The University Of Michigan | Integrated, proportionally controlled, and naturally compliant universal joint actuator with controllable stiffness |
| US6774597B1 (en) | 2001-03-30 | 2004-08-10 | The Regents Of The University Of Michigan | Apparatus for obstacle traversion |
| WO2002082979A2 (en) | 2001-04-18 | 2002-10-24 | Bbms Ltd. | Navigating and maneuvering of an in vivo vechicle by extracorporeal devices |
| US6783524B2 (en) | 2001-04-19 | 2004-08-31 | Intuitive Surgical, Inc. | Robotic surgical tool with ultrasound cauterizing and cutting instrument |
| US6994708B2 (en) | 2001-04-19 | 2006-02-07 | Intuitive Surgical | Robotic tool with monopolar electro-surgical scissors |
| US6687571B1 (en) * | 2001-04-24 | 2004-02-03 | Sandia Corporation | Cooperating mobile robots |
| KR100413058B1 (ko) | 2001-04-24 | 2003-12-31 | 한국과학기술연구원 | 모터 구동방식의 대장검사용 마이크로 로봇 |
| KR100426613B1 (ko) | 2001-05-19 | 2004-04-08 | 한국과학기술연구원 | 마이크로 로봇 구동시스템 |
| KR100402920B1 (ko) | 2001-05-19 | 2003-10-22 | 한국과학기술연구원 | 마이크로 로봇 |
| US7607440B2 (en) | 2001-06-07 | 2009-10-27 | Intuitive Surgical, Inc. | Methods and apparatus for surgical planning |
| US6440085B1 (en) | 2001-06-12 | 2002-08-27 | Jacek Krzyzanowski | Method of assembling a non-metallic biopsy forceps jaw and a non-metallic biopsy forceps jaw |
| US9226699B2 (en) | 2002-04-19 | 2016-01-05 | Sanofi-Aventis Deutschland Gmbh | Body fluid sampling module with a continuous compression tissue interface surface |
| US6817974B2 (en) | 2001-06-29 | 2004-11-16 | Intuitive Surgical, Inc. | Surgical tool having positively positionable tendon-actuated multi-disk wrist joint |
| JP4347043B2 (ja) * | 2001-06-29 | 2009-10-21 | イントゥイティブ・サージカル・インコーポレーテッド | プラットフォーム関節手首 |
| US20040243147A1 (en) | 2001-07-03 | 2004-12-02 | Lipow Kenneth I. | Surgical robot and robotic controller |
| US20050083460A1 (en) | 2001-07-16 | 2005-04-21 | Nippon Sheet Glass Co., Ltd. | Semi-transmitting mirror-possessing substrate, and semi-transmitting type liquid crystal display apparatus |
| JP4744026B2 (ja) | 2001-07-30 | 2011-08-10 | オリンパス株式会社 | カプセル内視鏡およびカプセル内視鏡システム |
| US6676684B1 (en) * | 2001-09-04 | 2004-01-13 | Intuitive Surgical, Inc. | Roll-pitch-roll-yaw surgical tool |
| US6728599B2 (en) | 2001-09-07 | 2004-04-27 | Computer Motion, Inc. | Modularity system for computer assisted surgery |
| US6764441B2 (en) * | 2001-09-17 | 2004-07-20 | Case Western Reserve University | Peristaltically self-propelled endoscopic device |
| US6587750B2 (en) | 2001-09-25 | 2003-07-01 | Intuitive Surgical, Inc. | Removable infinite roll master grip handle and touch sensor for robotic surgery |
| AU2002332031A1 (en) | 2001-10-02 | 2003-04-14 | Arthrocare Corporation | Apparatus and methods for electrosurgical removal and digestion of tissue |
| US6835173B2 (en) * | 2001-10-05 | 2004-12-28 | Scimed Life Systems, Inc. | Robotic endoscope |
| US7182025B2 (en) | 2001-10-17 | 2007-02-27 | William Marsh Rice University | Autonomous robotic crawler for in-pipe inspection |
| AU2002356817A1 (en) | 2001-10-17 | 2003-04-28 | William Marsh Rice University | Autonomous robotic crawler for in-pipe inspection |
| US6730021B2 (en) | 2001-11-07 | 2004-05-04 | Computer Motion, Inc. | Tissue spreader with force measurement, force indication or force limitation |
| KR100417163B1 (ko) * | 2001-11-12 | 2004-02-05 | 한국과학기술연구원 | 마이크로 캡슐형 로봇 |
| US7294146B2 (en) | 2001-12-03 | 2007-11-13 | Xtent, Inc. | Apparatus and methods for delivery of variable length stents |
| US6839612B2 (en) * | 2001-12-07 | 2005-01-04 | Institute Surgical, Inc. | Microwrist system for surgical procedures |
| US6793653B2 (en) | 2001-12-08 | 2004-09-21 | Computer Motion, Inc. | Multifunctional handle for a medical robotic system |
| US20030114731A1 (en) | 2001-12-14 | 2003-06-19 | Cadeddu Jeffrey A. | Magnetic positioning system for trocarless laparoscopic instruments |
| AT410986B (de) * | 2001-12-19 | 2003-09-25 | Silhouette Int Schmied Ag | Brillengestell |
| US6780191B2 (en) | 2001-12-28 | 2004-08-24 | Yacmur Llc | Cannula system |
| US6676660B2 (en) | 2002-01-23 | 2004-01-13 | Ethicon Endo-Surgery, Inc. | Feedback light apparatus and method for use with an electrosurgical instrument |
| US7967816B2 (en) | 2002-01-25 | 2011-06-28 | Medtronic, Inc. | Fluid-assisted electrosurgical instrument with shapeable electrode |
| US7637919B2 (en) | 2002-01-30 | 2009-12-29 | Olympus Corporation | Anastomosis system for performing anastomosis in body |
| WO2003068055A2 (en) | 2002-02-11 | 2003-08-21 | Arthrocare Corporation | Electrosurgical apparatus and methods for laparoscopy |
| DE50304179D1 (de) | 2002-03-05 | 2006-08-24 | Wagner Wilhelm Wiwa | Vorrichtung und Verfahren zur Innenbeschichtung eines Rohres |
| US7206627B2 (en) * | 2002-03-06 | 2007-04-17 | Z-Kat, Inc. | System and method for intra-operative haptic planning of a medical procedure |
| US8010180B2 (en) | 2002-03-06 | 2011-08-30 | Mako Surgical Corp. | Haptic guidance system and method |
| US7831292B2 (en) | 2002-03-06 | 2010-11-09 | Mako Surgical Corp. | Guidance system and method for surgical procedures with improved feedback |
| US20030179308A1 (en) | 2002-03-19 | 2003-09-25 | Lucia Zamorano | Augmented tracking using video, computed data and/or sensing technologies |
| JP3869291B2 (ja) * | 2002-03-25 | 2007-01-17 | オリンパス株式会社 | カプセル型医療装置 |
| JP3917885B2 (ja) | 2002-04-08 | 2007-05-23 | オリンパス株式会社 | カプセル内視鏡システム |
| US6860346B2 (en) * | 2002-04-19 | 2005-03-01 | Regents Of The University Of Minnesota | Adjustable diameter wheel assembly, and methods and vehicles using same |
| US7891935B2 (en) * | 2002-05-09 | 2011-02-22 | Brooks Automation, Inc. | Dual arm robot |
| US20030230372A1 (en) | 2002-06-13 | 2003-12-18 | Kurt Schmidt | Method for placing objects on the inner wall of a placed sewer pipe and device for carrying out said method |
| US6801325B2 (en) | 2002-06-25 | 2004-10-05 | Intuitive Surgical, Inc. | Method and devices for inspecting and calibrating of stereoscopic endoscopes |
| US7241740B2 (en) | 2002-08-13 | 2007-07-10 | Wyeth | Peptides as solubilizing excipients for transforming growth factor beta proteins |
| WO2004016224A2 (en) | 2002-08-19 | 2004-02-26 | Pharmacia Corporation | Antisense modulation of vegf co-regulated chemokine-1 expression |
| US6776165B2 (en) * | 2002-09-12 | 2004-08-17 | The Regents Of The University Of California | Magnetic navigation system for diagnosis, biopsy and drug delivery vehicles |
| US7645510B2 (en) | 2002-09-13 | 2010-01-12 | Jds Uniphase Corporation | Provision of frames or borders around opaque flakes for covert security applications |
| US6880877B2 (en) * | 2002-09-24 | 2005-04-19 | Yazaki Corporation | Bracket coupling structure |
| JP4133188B2 (ja) | 2002-10-07 | 2008-08-13 | 株式会社ハーモニック・ドライブ・システムズ | ロボットハンドの指ユニット |
| US7794494B2 (en) | 2002-10-11 | 2010-09-14 | Boston Scientific Scimed, Inc. | Implantable medical devices |
| JP3700848B2 (ja) | 2002-10-23 | 2005-09-28 | Necエンジニアリング株式会社 | 微小光源位置測定装置 |
| US6936003B2 (en) * | 2002-10-29 | 2005-08-30 | Given Imaging Ltd | In-vivo extendable element device and system, and method of use |
| JP4148763B2 (ja) | 2002-11-29 | 2008-09-10 | 学校法人慈恵大学 | 内視鏡手術ロボット |
| JP3686947B2 (ja) | 2002-12-09 | 2005-08-24 | 国立大学法人 東京大学 | 能動鉗子用高剛性鉗子先端部構体およびそれを具える能動鉗子 |
| JP4481247B2 (ja) | 2003-02-11 | 2010-06-16 | オリンパス株式会社 | オーバーチューブおよびオーバーチューブの製造方法 |
| US7083615B2 (en) | 2003-02-24 | 2006-08-01 | Intuitive Surgical Inc | Surgical tool having electrocautery energy supply conductor with inhibited current leakage |
| US7105000B2 (en) | 2003-03-25 | 2006-09-12 | Ethicon Endo-Surgery, Inc. | Surgical jaw assembly with increased mechanical advantage |
| JP3752494B2 (ja) | 2003-03-31 | 2006-03-08 | 株式会社東芝 | マスタスレーブマニピュレータ、その制御装置及び制御方法 |
| JP4329394B2 (ja) | 2003-04-30 | 2009-09-09 | 株式会社島津製作所 | 小型撮影装置 |
| DE10323216B3 (de) * | 2003-05-22 | 2004-12-23 | Siemens Ag | Endoskopieeinrichtung |
| US7121781B2 (en) | 2003-06-11 | 2006-10-17 | Intuitive Surgical | Surgical instrument with a universal wrist |
| JP4532188B2 (ja) | 2003-06-30 | 2010-08-25 | カール−ツアイス−スチフツング | 負荷回転モーメントを補償する手段を有する、殊に医療用光学器具のための保持装置 |
| GB0315479D0 (en) | 2003-07-02 | 2003-08-06 | Paz Adrian | Virtual ports devices |
| US7960935B2 (en) | 2003-07-08 | 2011-06-14 | The Board Of Regents Of The University Of Nebraska | Robotic devices with agent delivery components and related methods |
| US20080058989A1 (en) * | 2006-04-13 | 2008-03-06 | Board Of Regents Of The University Of Nebraska | Surgical camera robot |
| US7126303B2 (en) | 2003-07-08 | 2006-10-24 | Board Of Regents Of The University Of Nebraska | Robot for surgical applications |
| US7042184B2 (en) | 2003-07-08 | 2006-05-09 | Board Of Regents Of The University Of Nebraska | Microrobot for surgical applications |
| US20100081875A1 (en) | 2003-07-15 | 2010-04-01 | EndoRobotics Inc. | Surgical Device For Minimal Access Surgery |
| WO2009058350A1 (en) | 2007-11-02 | 2009-05-07 | The Trustees Of Columbia University In The City Of New York | Insertable surgical imaging device |
| US7066879B2 (en) | 2003-07-15 | 2006-06-27 | The Trustees Of Columbia University In The City Of New York | Insertable device and system for minimal access procedure |
| US20050021069A1 (en) | 2003-07-24 | 2005-01-27 | Gerald Feuer | Inflatable apparatus for accessing body cavity and methods of making |
| JP2005074031A (ja) * | 2003-09-01 | 2005-03-24 | Pentax Corp | カプセル内視鏡 |
| JP4128505B2 (ja) * | 2003-09-05 | 2008-07-30 | オリンパス株式会社 | カプセル型内視鏡 |
| JP4128504B2 (ja) * | 2003-09-05 | 2008-07-30 | オリンパス株式会社 | カプセル型内視鏡 |
| US7993384B2 (en) * | 2003-09-12 | 2011-08-09 | Abbott Cardiovascular Systems Inc. | Delivery system for medical devices |
| DE10343494B4 (de) | 2003-09-19 | 2006-06-14 | Siemens Ag | Magnetisch navigierbare Einrichtung für den Einsatz auf dem Gebiet der medizinischen Endoskopie |
| US7594815B2 (en) * | 2003-09-24 | 2009-09-29 | Toly Christopher C | Laparoscopic and endoscopic trainer including a digital camera |
| US7789825B2 (en) | 2003-09-29 | 2010-09-07 | Ethicon Endo-Surgery, Inc. | Handle for endoscopic device |
| US20050096502A1 (en) * | 2003-10-29 | 2005-05-05 | Khalili Theodore M. | Robotic surgical device |
| US7147650B2 (en) | 2003-10-30 | 2006-12-12 | Woojin Lee | Surgical instrument |
| WO2005046461A1 (en) | 2003-11-07 | 2005-05-26 | Carnegie Mellon University | Robot for minimally invasive interventions |
| US7429259B2 (en) | 2003-12-02 | 2008-09-30 | Cadeddu Jeffrey A | Surgical anchor and system |
| US7625338B2 (en) * | 2003-12-31 | 2009-12-01 | Given Imaging, Ltd. | In-vivo sensing device with alterable fields of view |
| US7566300B2 (en) | 2004-04-15 | 2009-07-28 | Wilson-Cook Medical, Inc. | Endoscopic surgical access devices and methods of articulating an external accessory channel |
| US8512219B2 (en) * | 2004-04-19 | 2013-08-20 | The Invention Science Fund I, Llc | Bioelectromagnetic interface system |
| US7857767B2 (en) | 2004-04-19 | 2010-12-28 | Invention Science Fund I, Llc | Lumen-traveling device |
| US7998060B2 (en) | 2004-04-19 | 2011-08-16 | The Invention Science Fund I, Llc | Lumen-traveling delivery device |
| US20070244520A1 (en) | 2004-04-19 | 2007-10-18 | Searete Llc | Lumen-traveling biological interface device and method of use |
| US7030683B2 (en) * | 2004-05-10 | 2006-04-18 | Sandisk Corporation | Four phase charge pump operable without phase overlap with improved efficiency |
| US7241290B2 (en) | 2004-06-16 | 2007-07-10 | Kinetic Surgical, Llc | Surgical tool kit |
| US8353897B2 (en) | 2004-06-16 | 2013-01-15 | Carefusion 2200, Inc. | Surgical tool kit |
| WO2006012128A2 (en) | 2004-06-24 | 2006-02-02 | Houston Stereotactic Concepts | Semi-robotic suturing device |
| US7892230B2 (en) | 2004-06-24 | 2011-02-22 | Arthrocare Corporation | Electrosurgical device having planar vertical electrode and related methods |
| US20050288555A1 (en) * | 2004-06-28 | 2005-12-29 | Binmoeller Kenneth E | Methods and devices for illuminating, vievwing and monitoring a body cavity |
| WO2006005075A2 (en) * | 2004-06-30 | 2006-01-12 | Amir Belson | Apparatus and methods for capsule endoscopy of the esophagus |
| JP4823496B2 (ja) * | 2004-08-23 | 2011-11-24 | オリンパス株式会社 | 観察システム |
| US20060046226A1 (en) | 2004-08-27 | 2006-03-02 | Bergler Hans J | Dental imaging system and method of use |
| JP2008518731A (ja) | 2004-11-08 | 2008-06-05 | ザ ジョンズ ホプキンス ユニバーシティー | 生検鉗子 |
| US8128680B2 (en) | 2005-01-10 | 2012-03-06 | Taheri Laduca Llc | Apparatus and method for deploying an implantable device within the body |
| US20060152591A1 (en) | 2005-01-13 | 2006-07-13 | Sheng-Feng Lin | Automatic focus mechanism of an image capturing device |
| US7763015B2 (en) | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| US7785251B2 (en) | 2005-04-22 | 2010-08-31 | Wilk Patent, Llc | Port extraction method for trans-organ surgery |
| US20060241570A1 (en) | 2005-04-22 | 2006-10-26 | Wilk Patent, Llc | Intra-abdominal medical method |
| US20110020779A1 (en) | 2005-04-25 | 2011-01-27 | University Of Washington | Skill evaluation using spherical motion mechanism |
| US7762960B2 (en) | 2005-05-13 | 2010-07-27 | Boston Scientific Scimed, Inc. | Biopsy forceps assemblies |
| US7708687B2 (en) | 2005-05-27 | 2010-05-04 | Bern M Jonathan | Endoscope propulsion system and method |
| JP2006337841A (ja) * | 2005-06-03 | 2006-12-14 | Oki Electric Ind Co Ltd | 位相差特定方法、位相シフトマスクの製造方法、位相シフトマスク、それを用いた露光方法およびそれを用いた半導体装置の製造方法 |
| WO2007011654A1 (en) | 2005-07-14 | 2007-01-25 | Enhanced Medical System Llc | Robot for minimally invasive interventions |
| US20070106113A1 (en) | 2005-11-07 | 2007-05-10 | Biagio Ravo | Combination endoscopic operative delivery system |
| US7761137B2 (en) | 2005-12-16 | 2010-07-20 | Suros Surgical Systems, Inc. | Biopsy site marker deployment device |
| US7762825B2 (en) | 2005-12-20 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Electro-mechanical interfaces to mount robotic surgical arms |
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| US7785333B2 (en) | 2006-02-21 | 2010-08-31 | Olympus Medical Systems Corp. | Overtube and operative procedure via bodily orifice |
| EP1815950A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Robotic surgical system for performing minimally invasive medical procedures |
| EP1815949A1 (en) | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Medical robotic system with manipulator arm of the cylindrical coordinate type |
| US20060253109A1 (en) | 2006-02-08 | 2006-11-09 | David Chu | Surgical robotic helping hand system |
| US9186046B2 (en) | 2007-08-14 | 2015-11-17 | Koninklijke Philips Electronics N.V. | Robotic instrument systems and methods utilizing optical fiber sensor |
| WO2007111571A1 (en) | 2006-03-27 | 2007-10-04 | Nanyang Technological University | Surgical robotic system for flexible endoscopy |
| US8585733B2 (en) | 2006-04-19 | 2013-11-19 | Vibrynt, Inc | Devices, tools and methods for performing minimally invasive abdominal surgical procedures |
| US7862573B2 (en) | 2006-04-21 | 2011-01-04 | Darois Roger E | Method and apparatus for surgical fastening |
| CA2650474A1 (en) | 2006-04-24 | 2007-11-08 | Synecor, Llc | Natural orifice surgical system |
| US7731727B2 (en) | 2006-04-26 | 2010-06-08 | Lsi Solutions, Inc. | Medical instrument to place a pursestring suture, open a hole and pass a guidewire |
| US7691103B2 (en) | 2006-04-29 | 2010-04-06 | Board Of Regents, The University Of Texas System | Devices for use in transluminal and endoluminal surgery |
| CA2654344C (en) | 2006-06-19 | 2015-11-03 | Robarts Research Institute | Apparatus for guiding a medical tool |
| US8974440B2 (en) * | 2007-08-15 | 2015-03-10 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US9579088B2 (en) | 2007-02-20 | 2017-02-28 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical visualization and device manipulation |
| US8679096B2 (en) | 2007-06-21 | 2014-03-25 | Board Of Regents Of The University Of Nebraska | Multifunctional operational component for robotic devices |
| EP2034922B1 (en) | 2006-06-22 | 2017-03-15 | Board of Regents of the University of Nebraska | Magnetically coupleable robotic devices |
| WO2008008457A2 (en) * | 2006-07-13 | 2008-01-17 | Bovie Medical | Surgical sealing and cutting apparatus |
| US8551114B2 (en) * | 2006-11-06 | 2013-10-08 | Human Robotics S.A. De C.V. | Robotic surgical device |
| JP5520048B2 (ja) | 2006-11-13 | 2014-06-11 | レイセオン カンパニー | 蛇行型ロボット式無限軌道車 |
| US7935130B2 (en) | 2006-11-16 | 2011-05-03 | Intuitive Surgical Operations, Inc. | Two-piece end-effectors for robotic surgical tools |
| JP2010514509A (ja) | 2006-12-27 | 2010-05-06 | ボストン サイエンティフィック リミテッド | Rfアブレーションプローブアレイ前進機器 |
| US7655004B2 (en) | 2007-02-15 | 2010-02-02 | Ethicon Endo-Surgery, Inc. | Electroporation ablation apparatus, system, and method |
| JP5327687B2 (ja) | 2007-03-01 | 2013-10-30 | 国立大学法人東京工業大学 | 力覚提示機能を有する操縦システム |
| US8591399B2 (en) | 2007-04-25 | 2013-11-26 | Karl Storz Endovision, Inc. | Surgical method utilizing transluminal endoscope and instruments |
| US9596980B2 (en) | 2007-04-25 | 2017-03-21 | Karl Storz Endovision, Inc. | Endoscope system with pivotable arms |
| US8444631B2 (en) | 2007-06-14 | 2013-05-21 | Macdonald Dettwiler & Associates Inc | Surgical manipulator |
| DE102007031957A1 (de) | 2007-07-10 | 2009-01-22 | Pierburg Gmbh | Kombiniertes Rückschlag- und Steuerventil |
| US8343171B2 (en) * | 2007-07-12 | 2013-01-01 | Board Of Regents Of The University Of Nebraska | Methods and systems of actuation in robotic devices |
| WO2009023839A1 (en) | 2007-08-15 | 2009-02-19 | Board Of Regents Of The University Of Nebraska | Medical inflation, attachment, and delivery devices and related methods |
| JP5364255B2 (ja) | 2007-10-31 | 2013-12-11 | テルモ株式会社 | 医療用マニピュレータ |
| US8758342B2 (en) | 2007-11-28 | 2014-06-24 | Covidien Ag | Cordless power-assisted medical cauterization and cutting device |
| US20100262162A1 (en) | 2007-12-28 | 2010-10-14 | Terumo Kabushiki Kaisha | Medical manipulator and medical robot system |
| US20090305210A1 (en) | 2008-03-11 | 2009-12-10 | Khurshid Guru | System For Robotic Surgery Training |
| US8020741B2 (en) | 2008-03-18 | 2011-09-20 | Barosense, Inc. | Endoscopic stapling devices and methods |
| US8328802B2 (en) | 2008-03-19 | 2012-12-11 | Covidien Ag | Cordless medical cauterization and cutting device |
| US8641663B2 (en) | 2008-03-27 | 2014-02-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system input device |
| US8727966B2 (en) | 2008-03-31 | 2014-05-20 | Intuitive Surgical Operations, Inc. | Endoscope with rotationally deployed arms |
| US9895813B2 (en) | 2008-03-31 | 2018-02-20 | Intuitive Surgical Operations, Inc. | Force and torque sensing in a surgical robot setup arm |
| WO2009144729A1 (en) | 2008-05-28 | 2009-12-03 | Technion Research & Development Foundation Ltd. | Laparoscopic camera array |
| US20100010294A1 (en) | 2008-07-10 | 2010-01-14 | Ethicon Endo-Surgery, Inc. | Temporarily positionable medical devices |
| US8771270B2 (en) | 2008-07-16 | 2014-07-08 | Intuitive Surgical Operations, Inc. | Bipolar cautery instrument |
| EP2337488B1 (en) * | 2008-07-18 | 2016-05-25 | Boston Scientific Scimed, Inc. | Endoscope with guide |
| US8500728B2 (en) | 2008-08-18 | 2013-08-06 | Encision, Inc. | Enhanced control systems including flexible shielding and support systems for electrosurgical applications |
| US20100069710A1 (en) | 2008-09-02 | 2010-03-18 | Ken Yamatani | treatment method |
| US8834353B2 (en) | 2008-09-02 | 2014-09-16 | Olympus Medical Systems Corp. | Medical manipulator, treatment system, and treatment method |
| AU2009291688A1 (en) | 2008-09-12 | 2010-03-18 | Ethicon Endo-Surgery, Inc. | Ultrasonic device for fingertip control |
| JP5115425B2 (ja) | 2008-09-24 | 2013-01-09 | 豊田合成株式会社 | Iii族窒化物半導体発光素子 |
| CA2776320C (en) | 2008-10-07 | 2017-08-29 | The Trustees Of Columbia University In The City Of New York | Systems, devices, and method for providing insertable robotic sensory and manipulation platforms for single port surgery |
| ITFI20080201A1 (it) | 2008-10-20 | 2010-04-21 | Scuola Superiore Di Studi Universit Ari E Di Perfe | Sistema robotico endoluminale |
| KR101075363B1 (ko) | 2008-10-31 | 2011-10-19 | 정창욱 | 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 |
| US8858547B2 (en) | 2009-03-05 | 2014-10-14 | Intuitive Surgical Operations, Inc. | Cut and seal instrument |
| EP2286756B1 (en) | 2009-08-21 | 2013-04-03 | Novineon Healthcare Technology Partners Gmbh | Surgical manipulator means |
| JP2011045500A (ja) | 2009-08-26 | 2011-03-10 | Terumo Corp | 医療用マニピュレータ |
| US8465476B2 (en) | 2009-09-23 | 2013-06-18 | Intuitive Surgical Operations, Inc. | Cannula mounting fixture |
| US8551115B2 (en) | 2009-09-23 | 2013-10-08 | Intuitive Surgical Operations, Inc. | Curved cannula instrument |
| US8888687B2 (en) | 2009-10-28 | 2014-11-18 | Boston Scientific Scimed, Inc. | Method and apparatus related to a flexible assembly at a distal end portion of a medical device |
| US8870759B2 (en) | 2009-12-04 | 2014-10-28 | Covidien Lp | Suspension system for minimally invasive surgery |
| WO2011075693A1 (en) | 2009-12-17 | 2011-06-23 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| WO2011118646A1 (ja) | 2010-03-24 | 2011-09-29 | 株式会社安川電機 | ロボットハンド及びロボット装置 |
| US20110238080A1 (en) | 2010-03-25 | 2011-09-29 | Date Ranjit | Robotic Surgical Instrument System |
| US9498298B2 (en) | 2010-04-23 | 2016-11-22 | Kenneth I. Lipow | Ring form surgical effector |
| IT1399603B1 (it) | 2010-04-26 | 2013-04-26 | Scuola Superiore Di Studi Universitari E Di Perfez | Apparato robotico per interventi di chirurgia minimamente invasiva |
| JP5311294B2 (ja) | 2010-04-28 | 2013-10-09 | 株式会社安川電機 | ロボットの接触位置検出装置 |
| JP5851499B2 (ja) | 2010-06-25 | 2016-02-03 | マツィエイ ジェイ. チェトゥラキス, | 側方に離間した仮想挿入点を伴う単一ポート腹腔鏡下アクセス |
| EP2600758A1 (en) * | 2010-08-06 | 2013-06-12 | Board of Regents of the University of Nebraska | Methods and systems for handling or delivering materials for natural orifice surgery |
| DE102010040405B4 (de) | 2010-09-08 | 2017-07-27 | Siemens Healthcare Gmbh | Instrumentensystem für einen Endoskopieroboter |
| WO2013048595A1 (en) | 2011-06-10 | 2013-04-04 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to surgical end effectors |
| CA3082073C (en) | 2011-07-11 | 2023-07-25 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| JP6377530B2 (ja) | 2012-01-10 | 2018-08-22 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | 外科的挿入装置 |
| CA2871149C (en) | 2012-05-01 | 2020-08-25 | Board Of Regents Of The University Of Nebraska | Single site robotic device and related systems and methods |
| EP4234185A3 (en) | 2012-06-22 | 2023-09-20 | Board of Regents of the University of Nebraska | Local control robotic surgical devices |
| JP2015526171A (ja) | 2012-08-08 | 2015-09-10 | ボード オブ リージェンツ オブ ザ ユニバーシティ オブ ネブラスカ | ロボット手術用デバイス、システム及び関連の方法 |
| US10667883B2 (en) | 2013-03-15 | 2020-06-02 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| CA2918531A1 (en) | 2013-07-17 | 2015-01-22 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
-
2007
- 2007-06-21 EP EP07796365.0A patent/EP2034922B1/en active Active
- 2007-06-21 CA CA3068216A patent/CA3068216C/en active Active
- 2007-06-21 US US11/766,683 patent/US8968332B2/en active Active
- 2007-06-21 EP EP11180984.4A patent/EP2397101B1/en not_active Not-in-force
- 2007-06-21 US US11/766,720 patent/US8834488B2/en active Active
- 2007-06-21 WO PCT/US2007/014567 patent/WO2007149559A2/en active Application Filing
- 2007-06-21 CA CA2655964A patent/CA2655964C/en not_active Expired - Fee Related
- 2007-06-21 CA CA2861159A patent/CA2861159C/en not_active Expired - Fee Related
- 2007-06-21 CA CA2991346A patent/CA2991346C/en not_active Expired - Fee Related
- 2007-06-21 JP JP2009516581A patent/JP5466004B2/ja not_active Expired - Fee Related
- 2007-11-29 US US11/947,097 patent/US7772796B2/en not_active Expired - Fee Related
-
2014
- 2014-01-23 JP JP2014010758A patent/JP5864628B2/ja not_active Expired - Fee Related
-
2015
- 2015-02-09 US US14/617,232 patent/US10307199B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CA3068216A1 (en) | 2007-12-27 |
| US20080004634A1 (en) | 2008-01-03 |
| US20150223896A1 (en) | 2015-08-13 |
| US7772796B2 (en) | 2010-08-10 |
| EP2034922B1 (en) | 2017-03-15 |
| US8834488B2 (en) | 2014-09-16 |
| CA2655964C (en) | 2014-10-28 |
| US10307199B2 (en) | 2019-06-04 |
| JP2009540934A (ja) | 2009-11-26 |
| EP2397101B1 (en) | 2018-06-13 |
| CA2655964A1 (en) | 2007-12-27 |
| JP2014176622A (ja) | 2014-09-25 |
| CA2861159A1 (en) | 2007-12-27 |
| US20090069821A1 (en) | 2009-03-12 |
| EP2397101A2 (en) | 2011-12-21 |
| CA3068216C (en) | 2023-03-07 |
| US8968332B2 (en) | 2015-03-03 |
| WO2007149559A3 (en) | 2008-06-19 |
| CA2991346C (en) | 2020-03-10 |
| US20080058835A1 (en) | 2008-03-06 |
| CA2861159C (en) | 2018-02-27 |
| WO2007149559A2 (en) | 2007-12-27 |
| CA2991346A1 (en) | 2007-12-27 |
| EP2397101A3 (en) | 2014-03-19 |
| JP5864628B2 (ja) | 2016-02-17 |
| EP2034922A2 (en) | 2009-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5864628B2 (ja) | 磁気的連結可能ロボット装置および関連する方法 | |
| US9403281B2 (en) | Robotic devices with arms and related methods | |
| JP5827219B2 (ja) | 柔軟な内視鏡検査のためのロボットシステム | |
| Platt et al. | Vision and task assistance using modular wireless in vivo surgical robots | |
| US10993734B2 (en) | Control unit for a medical device | |
| Tognarelli et al. | An endoluminal robotic platform for Minimally Invasive Surgery | |
| JP2020509798A (ja) | 手術器具用コントローラ | |
| Rentschler et al. | Recent in vivo surgical robot and mechanism developments | |
| Traeger et al. | Design of a spine-inspired kinematic for the guidance of flexible instruments in minimally invasive surgery | |
| Zhang et al. | Cooperative robotic assistant for laparoscopic surgery: CoBRASurge | |
| Lehman et al. | Dexterous miniature in vivo robot for NOTES | |
| Lee et al. | Robotic endoscopy system (easyEndo) with a robotic arm mountable on a conventional endoscope | |
| CN112040879A (zh) | 用于一医疗器材的控制单元 | |
| Dumpert | Towards supervised autonomous task completion using an in vivo surgical robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100618 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100618 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120508 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120808 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120815 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20120829 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20120905 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130319 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130618 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130625 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130918 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131224 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140123 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5466004 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |