JP4635259B2 - クローラロボット - Google Patents
クローラロボット Download PDFInfo
- Publication number
- JP4635259B2 JP4635259B2 JP2006064991A JP2006064991A JP4635259B2 JP 4635259 B2 JP4635259 B2 JP 4635259B2 JP 2006064991 A JP2006064991 A JP 2006064991A JP 2006064991 A JP2006064991 A JP 2006064991A JP 4635259 B2 JP4635259 B2 JP 4635259B2
- Authority
- JP
- Japan
- Prior art keywords
- crawler
- triangular
- robot
- crawler device
- link
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/06—Endless track vehicles with tracks without ground wheels
- B62D55/065—Multi-track vehicles, i.e. more than two tracks
- B62D55/0655—Articulated endless track vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/06—Endless track vehicles with tracks without ground wheels
- B62D55/075—Tracked vehicles for ascending or descending stairs, steep slopes or vertical surfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/18—Tracks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D55/00—Endless track vehicles
- B62D55/08—Endless track units; Parts thereof
- B62D55/30—Track-tensioning means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D59/00—Trailers with driven ground wheels or the like
- B62D59/04—Trailers with driven ground wheels or the like driven from propulsion unit on trailer
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
Description
ローラ装置におけるローラ間の3辺の中間において、クローラを内部から突出させるクローラガイドを進退自在に設けたことを特徴とする。
A.クローラロボット単体としての用途:
・ 夜間のデパート、オフィスビル、美術館、博物館などの巡回警備
・ ホームセキュリティー等の侵入監視用ロボット
・ ショールーム内、アミューズメントパーク内のナビゲーション
・ 弱視者や老齢者の歩行補助
・ センサ種類などと適宜変更し、教育用プラットフォームとしての利用
B.複数クローラロボット間の無線を利用した情報連携による用途:
・ デパート、地下街、地下鉄ホーム等の公共エリアにおける災害、テロ発生時の情報収集
・ 大規模ファームにおけるフィールドデータ収集
・ 金属探知センサ等を適宜追加して、地雷源探査、除去
・ 津波、地震災害後の人命捜索
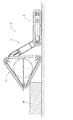
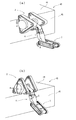
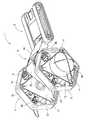
2 三角クローラ装置
3 従動クローラ装置
4 1節リンク
11 中心支軸
12 内側三角フレーム
13 外側三角フレーム
14 ローラ
15 弾性クローラ
16 第1三角クローラ
17 第2三角クローラ
18 第1センサケース
19 第2センサケース
20 ガード
21 支軸
22 案内溝
23 第1アーム
24 第2アーム
25 支持アーム
26 支持アーム
27 第1標準クローラ
28 第2標準クローラ
29 前側軸
30 ローラ
31 後側軸
32 ローラ
Claims (12)
- 三角形状をなすフレームの各頂点に配置されたローラに巻き掛けた第1及び第2の三角クローラを両側に設け、両フレームの中心を支軸により連結して三角クローラ装置を構成し、
2個のローラの間にクローラを巻き掛けた第1及び第2の標準クローラにより従動クローラ装置を構成し、
前記三角クローラ装置の支軸と前記従動クローラ装置とをリンクの両端に回動自在に連結し、前記三角クローラ装置の外周縁内に前記リンク及び前記従動クローラ装置が収納されるように構成したことを特徴とするクローラロボット。 - 前記リンクは第1リンクと第2リンクとを回動自在に連結した1節リンクであることを特徴とする請求項1記載のクローラロボット装置。
- 前記三角クローラ装置と前記従動クローラ装置間に重量差を設け、前記リンクの回動によりクローラロボット全体の重心移動を行うことを特徴とする請求項1記載のクローラロボット装置。
- 前記三角クローラ装置と前記従動クローラ装置とが共に接地状態で走行可能に構成したことを特徴とする請求項1記載のクローラロボット装置。
- 三角クローラ装置によって従動クローラ装置を持ち上げて走行可能に構成したことを特徴とする請求項1記載のクローラロボット。
- 前記従動クローラ装置によって前記三角クローラ装置を持ち上げて走行可能に構成したことを特徴とする請求項1記載のクローラロボット。
- 前記従動クローラ装置によって前記三角クローラ装置を持ち上げて段部に載置し、該段部に載置した前記三角クローラ装置によって前記従動クローラ装置を該段部に持ち上げる作動を行う構成としたことを特徴とする請求項1記載のクローラロボット。
- 前記三角形状をなすフレームを前記支軸周りに回転させ、前記三角クローラの接地面前方を接地面より浮かすことにより、段差を乗り越える作動を行う構成としたことを特徴とする請求項1記載のクローラロボット。
- 前記従動クローラ装置で後方より圧力を加えることにより、前記三角クローラ接地面のグリップを向上させ、高い段差を乗り越える作動を行う構成としたことを特徴とする請求項9記載のクローラロボット。
- 前記三角クローラ装置における前記ローラ間の3辺の中間において、前記クローラを内部から突出させるクローラガイドを進退自在に設けたことを特徴とする請求項1記載のクローラロボット。
- 前記クローラガイドを突出させたとき、前記三角クローラ装置のフレームを、支軸を中心に回転して走行可能に構成したことを特徴とする請求項10記載のクローラロボット。
- 前記従動クローラ装置に他のクローラロボットと連結する連結手段を備え、複数のクローラロボットを数珠繋ぎに連結可能としたことを特徴とする請求項1記載のクローラロボット。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006064991A JP4635259B2 (ja) | 2006-03-10 | 2006-03-10 | クローラロボット |
| AT07250985T ATE489279T1 (de) | 2006-03-10 | 2007-03-09 | Raupenroboter |
| DE602007010684T DE602007010684D1 (de) | 2006-03-10 | 2007-03-09 | Raupenroboter |
| US11/715,927 US7793743B2 (en) | 2006-03-10 | 2007-03-09 | Crawler robot |
| EP07250985A EP1832501B1 (en) | 2006-03-10 | 2007-03-09 | Crawler robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006064991A JP4635259B2 (ja) | 2006-03-10 | 2006-03-10 | クローラロボット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007237991A JP2007237991A (ja) | 2007-09-20 |
| JP4635259B2 true JP4635259B2 (ja) | 2011-02-23 |
Family
ID=38137498
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006064991A Expired - Lifetime JP4635259B2 (ja) | 2006-03-10 | 2006-03-10 | クローラロボット |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7793743B2 (ja) |
| EP (1) | EP1832501B1 (ja) |
| JP (1) | JP4635259B2 (ja) |
| AT (1) | ATE489279T1 (ja) |
| DE (1) | DE602007010684D1 (ja) |
Families Citing this family (65)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2112963B1 (en) * | 2006-10-06 | 2018-05-30 | iRobot Defense Holdings, Inc. | Robotic vehicle with tracks and flippers |
| US7654348B2 (en) | 2006-10-06 | 2010-02-02 | Irobot Corporation | Maneuvering robotic vehicles having a positionable sensor head |
| US7891446B2 (en) * | 2006-10-06 | 2011-02-22 | Irobot Corporation | Robotic vehicle deck adjustment |
| CN101626946B (zh) | 2006-11-13 | 2013-06-05 | 雷神萨科斯公司 | 用于轻型机器人车辆的悬架系统和该车辆的支承方法 |
| DE602007007807D1 (de) | 2006-11-13 | 2010-08-26 | Raytheon Sarcos Llc | Vielseitig verwendbares endlosband für leichte mobile roboter |
| CN102141181B (zh) * | 2006-11-13 | 2014-10-08 | 雷神萨科斯公司 | 蛇形机器人履带车 |
| EP2476604B1 (en) * | 2006-11-13 | 2013-08-21 | Raytheon Company | Tracked robotic crawler having a moveable arm |
| JP4237249B2 (ja) * | 2007-01-25 | 2009-03-11 | トピー工業株式会社 | クローラ装置とその自動姿勢制御 |
| WO2008137953A1 (en) | 2007-05-07 | 2008-11-13 | Raytheon Sarcos, Llc | Method for manufacturing a complex structure |
| US7874386B2 (en) * | 2007-05-11 | 2011-01-25 | Pinhas Ben-Tzvi | Hybrid mobile robot |
| GB2489146B (en) * | 2007-07-02 | 2012-11-21 | Hobbs Ind Ltd | A wall tie |
| CN101784435B (zh) | 2007-07-10 | 2013-08-28 | 雷神萨科斯公司 | 模块化机器人履带车 |
| JP5384031B2 (ja) * | 2008-05-26 | 2014-01-08 | 大和ハウス工業株式会社 | 段差越えクローラー式走行車装置 |
| US7926598B2 (en) | 2008-12-09 | 2011-04-19 | Irobot Corporation | Mobile robotic vehicle |
| US8392036B2 (en) | 2009-01-08 | 2013-03-05 | Raytheon Company | Point and go navigation system and method |
| US8317555B2 (en) | 2009-06-11 | 2012-11-27 | Raytheon Company | Amphibious robotic crawler |
| US8935014B2 (en) | 2009-06-11 | 2015-01-13 | Sarcos, Lc | Method and system for deploying a surveillance network |
| CN102802881B (zh) * | 2010-01-14 | 2015-12-16 | 工程服务公司 | 移动机器人 |
| CN102198655B (zh) * | 2010-03-22 | 2013-04-03 | 常州机械电子工程研究所 | 一种搜救机器人 |
| CN101973320B (zh) * | 2010-09-21 | 2012-06-13 | 上海大学 | 仿真蠕动行走装置 |
| US20120183383A1 (en) * | 2010-09-26 | 2012-07-19 | Rustam Stolkin | Mechanism and method of operation for polymorphic tracked vehicles such that the vehicle's weight can be spread between multiple supporting wheels |
| WO2012044663A1 (en) * | 2010-09-30 | 2012-04-05 | Schlee Keith L | Multi-unit mobile robot |
| US10315715B2 (en) * | 2010-11-08 | 2019-06-11 | James Beard | Mobile, climbing endless track robotic system to perform remote inspections on structures |
| US9522595B2 (en) | 2011-01-27 | 2016-12-20 | Irobot Defense Holdings, Inc. | Small unmanned ground vehicle |
| US9346499B2 (en) | 2011-01-27 | 2016-05-24 | Irobot Corporation | Resilient wheel assemblies |
| RU2472662C1 (ru) * | 2011-06-22 | 2013-01-20 | Геннадий Феофанович Мамарин | Гусеничный движитель транспортного средства для преодоления эскарпа, контрэскарпа и лестничных маршей |
| CN102390444A (zh) * | 2011-10-24 | 2012-03-28 | 上海电力学院 | 自适应地面应急救援辅助机器人 |
| CN102514640B (zh) * | 2011-12-07 | 2013-11-06 | 宁波大学 | 一种可变形的救援机器人 |
| TW201339034A (zh) * | 2012-03-30 | 2013-10-01 | Rui-Ren Zhou | 移動載具之爬階機構 |
| US9248875B2 (en) * | 2012-04-17 | 2016-02-02 | Robo-team Ltd. | Driving flipper with robotic arm |
| US8393422B1 (en) | 2012-05-25 | 2013-03-12 | Raytheon Company | Serpentine robotic crawler |
| US20140031977A1 (en) | 2012-07-27 | 2014-01-30 | Engineering Services Inc. | Modular mobile robot |
| US8434576B1 (en) | 2012-08-21 | 2013-05-07 | Andrew Ferguson | Mobile reconnaissance apparatus with articulating traction control |
| US9031698B2 (en) | 2012-10-31 | 2015-05-12 | Sarcos Lc | Serpentine robotic crawler |
| CN103110487B (zh) * | 2013-03-18 | 2015-08-26 | 王永军 | 一种梯陆两栖无障碍智能机器人轮椅 |
| DE102013006692B4 (de) * | 2013-04-16 | 2020-10-01 | Iav Gmbh Ingenieurgesellschaft Auto Und Verkehr | Universelles autonomes Fahrgestell zum Transport von Funktions- und Lastträgervorrichtungen |
| CN103318288A (zh) * | 2013-06-03 | 2013-09-25 | 上海大学 | 一种同步带传动式全履带机器人 |
| ITTO20130544A1 (it) | 2013-07-01 | 2015-01-02 | Oto Melara Spa | Telaio per un veicolo terrestre senza equipaggio a bordo o ugv. |
| US9409292B2 (en) | 2013-09-13 | 2016-08-09 | Sarcos Lc | Serpentine robotic crawler for performing dexterous operations |
| CN103863424B (zh) * | 2014-02-26 | 2017-11-28 | 南昌大学 | 能适应复杂非结构化地形的巡检机器人 |
| US9566711B2 (en) | 2014-03-04 | 2017-02-14 | Sarcos Lc | Coordinated robotic control |
| JP6463621B2 (ja) * | 2014-11-20 | 2019-02-06 | 株式会社 日立産業制御ソリューションズ | 走行装置 |
| US9809264B1 (en) * | 2015-07-20 | 2017-11-07 | The United States Of America, As Represented By The Secretary Of The Navy | Track kit for two wheeled balancing ground vehicle |
| US10071303B2 (en) | 2015-08-26 | 2018-09-11 | Malibu Innovations, LLC | Mobilized cooler device with fork hanger assembly |
| US10807659B2 (en) | 2016-05-27 | 2020-10-20 | Joseph L. Pikulski | Motorized platforms |
| CN105539614B (zh) * | 2015-12-18 | 2017-07-21 | 哈尔滨科能熔敷科技有限公司 | 利用数学建模多点同步测厚的水冷壁爬壁机器人 |
| JP6503402B2 (ja) * | 2016-08-02 | 2019-04-17 | 必飛有限公司B−Free Limited | 履帯式移動装置 |
| WO2018027219A1 (en) * | 2016-08-05 | 2018-02-08 | Irobot Defense Holdings, Inc. | Unmanned ground vehicle with compact manipulator stowing |
| US10471589B2 (en) | 2016-09-20 | 2019-11-12 | Foster-Miller, Inc. | Remotely controlled packable robot |
| US10414039B2 (en) | 2016-09-20 | 2019-09-17 | Foster-Miller, Inc. | Remotely controlled packable robot |
| WO2018154424A1 (en) | 2017-02-21 | 2018-08-30 | Induna Robotics (Pty) Ltd | Robotic limb arrangement and associated robot |
| US10889340B2 (en) | 2017-07-07 | 2021-01-12 | Foster-Miller, Inc. | Remotely controlled packable robot with folding tracks |
| CN108633455B (zh) * | 2018-03-23 | 2022-01-28 | 华南农业大学 | 一种三角履带式切段式甘蔗联合收割机 |
| CN109050693B (zh) * | 2018-07-11 | 2024-02-02 | 济南大学 | 一种具有跟随功能的上台阶装置及其实现方法 |
| US11331818B2 (en) | 2018-10-11 | 2022-05-17 | Foster-Miller, Inc. | Remotely controlled packable robot |
| CN109131613A (zh) * | 2018-10-12 | 2019-01-04 | 安徽工程大学 | 一种全地形运输机器人及其控制方法 |
| CN109850023A (zh) * | 2019-03-05 | 2019-06-07 | 内蒙古第一机械集团股份有限公司 | 一种行星式三角履带行走与驱动装置 |
| CN109955927A (zh) * | 2019-04-24 | 2019-07-02 | 重庆科技学院 | 一种自适应复杂3d金属曲面的智能移动机器人的行走系统 |
| CN110978919B (zh) * | 2019-12-18 | 2023-07-14 | 威海多鱼海洋科技有限公司 | 一种履带式海生物捕捞机器人 |
| CN111345949B (zh) * | 2020-01-07 | 2020-12-22 | 重庆大学 | 一种自动爬楼梯装置、控制方法及轮椅 |
| JP7437622B2 (ja) * | 2020-03-13 | 2024-02-26 | 株式会社リコー | 走行装置 |
| CN111872915A (zh) * | 2020-07-14 | 2020-11-03 | 重庆大学 | 基于摆动式履带轮的越障勘探机器人 |
| US12311550B2 (en) | 2020-12-31 | 2025-05-27 | Sarcos Corp. | Smart control system for a robotic device |
| TR2021019459A2 (tr) * | 2021-12-09 | 2023-06-21 | Havelsan Hava Elektronik Sanayi Ve Ticaret Anonim Sirketi | Mağara ve meskun mahal i̇nsansiz kara araci |
| WO2024251314A1 (en) * | 2023-06-06 | 2024-12-12 | České vysoké učení technické v Praze | Robotic vehicle chassis with independently controllable triangular tracks and tactile perception of terrain shape and compliance |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2751027A (en) * | 1952-05-19 | 1956-06-19 | Robert B Mclaughlin | Endless track supported invalid chair |
| GB844768A (en) | 1955-10-10 | 1960-08-17 | Johann Wilhelm Ludowici | Improvements in or relating to endless track units for vehicles |
| US3414072A (en) * | 1965-09-16 | 1968-12-03 | Lockheed Aircraft Corp | Vehicle capable of articulating about roll, pitch, and yaw axes |
| US3417832A (en) * | 1966-10-24 | 1968-12-24 | William B Jaspert | Wheeled vehicle selectively convertible to endless track vehicle |
| CH542069A (de) * | 1970-09-24 | 1973-09-30 | Sig Schweiz Industrieges | Fahrzeug mit Fahrgastsitzen |
| US3730287A (en) * | 1971-05-17 | 1973-05-01 | Nasa | Vehicle for use in planetary exploration |
| JPS58191673A (ja) | 1982-05-04 | 1983-11-08 | Mitsubishi Heavy Ind Ltd | 走行装置 |
| JPS58224870A (ja) * | 1982-06-24 | 1983-12-27 | Toshiba Corp | 走行装置 |
| JPS5918072A (ja) * | 1982-07-20 | 1984-01-30 | Toshiba Corp | 走行体 |
| JPS5997178U (ja) * | 1982-12-21 | 1984-07-02 | 株式会社小松製作所 | 履帯式走行装置 |
| CA1245510A (en) * | 1984-03-05 | 1988-11-29 | Arktos Developments Ltd. | All terrain vehicle and method of operating same |
| JPS6167678A (ja) * | 1984-09-10 | 1986-04-07 | Mitsubishi Electric Corp | 移動装置 |
| JPS61160366A (ja) | 1984-12-30 | 1986-07-21 | Shinwa Seisakusho:Kk | 運搬車の荷台調節装置 |
| JPS61222879A (ja) | 1985-03-29 | 1986-10-03 | Kobe Steel Ltd | 移動装置 |
| FR2583701B1 (fr) * | 1985-06-21 | 1990-03-23 | Commissariat Energie Atomique | Vehicule a chenilles a geometrie variable |
| JPS6379282U (ja) | 1986-11-12 | 1988-05-25 | ||
| JPH01132475A (ja) * | 1987-11-14 | 1989-05-24 | Aisin Aw Co Ltd | 二重ベルトプーリー機構 |
| JPH0333484U (ja) * | 1989-08-09 | 1991-04-02 | ||
| WO1992002398A1 (en) * | 1990-08-08 | 1992-02-20 | Kabushiki Kaisha Komatsu Seisakusho | Disaster relief robot and its operation controller |
| IL98207A (en) * | 1991-05-22 | 1994-08-26 | Israel Aircraft Ind Ltd | Wheelchair with apparatus for assisting travel on a surface not suitable for wheeled travel |
| JP2580542B2 (ja) | 1994-11-14 | 1997-02-12 | 防衛庁技術研究本部長 | おにぎり機構を有するフレキシブルクローラ |
| US5650579A (en) | 1995-12-05 | 1997-07-22 | General Electric Company | Miniature air gap inspection crawler |
| JPH09226637A (ja) | 1996-02-28 | 1997-09-02 | Suzuki Motor Corp | クローラ装置及びこれを用いた走行車両 |
| JP3692602B2 (ja) | 1996-03-08 | 2005-09-07 | スズキ株式会社 | 走行車両 |
| JPH10236345A (ja) * | 1997-02-26 | 1998-09-08 | Showa Aircraft Ind Co Ltd | 特殊走行車 |
| US6571893B2 (en) * | 1997-12-22 | 2003-06-03 | Yozmot Gfanot Initiative Center | Light vehicle for sporting and off-road biking |
| US6523629B1 (en) * | 1999-06-07 | 2003-02-25 | Sandia Corporation | Tandem mobile robot system |
| JP4142496B2 (ja) * | 2002-07-29 | 2008-09-03 | 耕一 岡本 | 階段を昇降する車 |
| US7017687B1 (en) * | 2002-11-21 | 2006-03-28 | Sarcos Investments Lc | Reconfigurable articulated leg and wheel |
| JP4264504B2 (ja) | 2003-01-22 | 2009-05-20 | 消防庁長官 | 形状変化機構を有する多面体移動装置 |
| US6837318B1 (en) * | 2003-03-28 | 2005-01-04 | Hanna Craig | Rescue and exploration apparatus |
| DE20314213U1 (de) | 2003-09-12 | 2003-11-20 | Ebisch, Siegfried, 08236 Ellefeld | Schreitender Roboter |
| JP4021907B2 (ja) | 2004-04-27 | 2007-12-12 | 直 石嶺 | 走行装置 |
| JP4721461B2 (ja) | 2004-04-30 | 2011-07-13 | コリア インスティテュート オブ サイエンス アンド テクノロジー | 走行用リンク型ダブルトラック装置 |
-
2006
- 2006-03-10 JP JP2006064991A patent/JP4635259B2/ja not_active Expired - Lifetime
-
2007
- 2007-03-09 AT AT07250985T patent/ATE489279T1/de not_active IP Right Cessation
- 2007-03-09 EP EP07250985A patent/EP1832501B1/en not_active Not-in-force
- 2007-03-09 DE DE602007010684T patent/DE602007010684D1/de active Active
- 2007-03-09 US US11/715,927 patent/US7793743B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007237991A (ja) | 2007-09-20 |
| EP1832501B1 (en) | 2010-11-24 |
| US7793743B2 (en) | 2010-09-14 |
| DE602007010684D1 (de) | 2011-01-05 |
| EP1832501A2 (en) | 2007-09-12 |
| EP1832501A3 (en) | 2007-11-28 |
| ATE489279T1 (de) | 2010-12-15 |
| US20070209844A1 (en) | 2007-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4635259B2 (ja) | クローラロボット | |
| JP4607442B2 (ja) | クローラ型走行ロボット | |
| JP4719866B2 (ja) | 移動装置 | |
| JP4181040B2 (ja) | 車両の可適応牽引システム | |
| JP5179138B2 (ja) | 多脚型走行装置 | |
| US20130081885A1 (en) | Transformability(TM): personal mobility with shape-changing wheels | |
| CN106184434B (zh) | 轮履变换移动底盘及具有其的消防探测机器人 | |
| JP5467423B2 (ja) | 段差乗越車輪及び車輪型ロボット | |
| KR101094740B1 (ko) | 이동로봇 | |
| CN212497797U (zh) | 一种多功能越障救援车 | |
| CN111923058A (zh) | 一种多功能越障救援车 | |
| JPH08133141A (ja) | おにぎり機構を有するフレキシブルクローラ | |
| JPH0966855A (ja) | クローラ式走行車 | |
| CN102490803B (zh) | 一种轮式联动越障行走机构 | |
| JPH0632263A (ja) | 足付き移動車両 | |
| KR20170135696A (ko) | 단차 장애물 극복 주행을 위한 이동체용 트랙 시스템 | |
| CN103318279B (zh) | 轮履带移动装置 | |
| JP6358731B2 (ja) | 車輪型移動体及び車椅子 | |
| TWM492845U (zh) | 一種停車輔助裝置 | |
| CN110271622A (zh) | 轮足式结构及轮足式机器人 | |
| JPS6323954B2 (ja) | ||
| JP3141156B2 (ja) | 移動車両用タイヤ | |
| KR20160003497A (ko) | 플리퍼를 구비한 로봇의 이동 플랫폼 | |
| JP2604112B2 (ja) | 全方向移動用車両 | |
| KR100811860B1 (ko) | 장애물 지대 극복 로봇 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080327 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100527 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100622 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100811 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101102 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101104 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4635259 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131203 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |