JP4582168B2 - 回転機の制御装置、及び回転機の制御システム - Google Patents
回転機の制御装置、及び回転機の制御システム Download PDFInfo
- Publication number
- JP4582168B2 JP4582168B2 JP2008072917A JP2008072917A JP4582168B2 JP 4582168 B2 JP4582168 B2 JP 4582168B2 JP 2008072917 A JP2008072917 A JP 2008072917A JP 2008072917 A JP2008072917 A JP 2008072917A JP 4582168 B2 JP4582168 B2 JP 4582168B2
- Authority
- JP
- Japan
- Prior art keywords
- norm
- rotating machine
- operation signal
- phase
- voltage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/02—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles characterised by the form of the current used in the control circuit
- B60L15/025—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles characterised by the form of the current used in the control circuit using field orientation; Vector control; Direct Torque Control [DTC]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Description
以下、本発明にかかる回転機の制御装置をハイブリッド車の制御装置に適用した第1の実施形態について、図面を参照しつつ説明する。
<電流フィードバック制御部20の処理>
モータジェネレータ10の各相を流れる電流iu,iv,iwは、2相変換部40において、回転2相座標系の実電流であるd軸上の実電流idとq軸上の実電流iqとに変換される。一方、指令電流設定部22は、要求トルクTdに基づき、回転2相座標系の電流の指令値であるd軸上の指令電流idc及びq軸上の指令電流iqcを設定する。ここでは、例えば最大トルク制御を実現するように指令電流idc,iqcを設定すればよい。フィードバック制御部24は、d軸上の実電流idを指令電流idcにフィードバック制御するための操作量としてのd軸上の電圧を算出する。一方、フィードバック制御部25は、q軸上の実電流iqを指令電流iqcにフィードバック制御するための操作量としてのq軸上の電圧を算出する。詳しくは、フィードバック制御部24,25では、比例積分制御を用いて上記算出を行う。
<トルクフィードバック制御部30の処理>
トルク推定器42では、回転2相座標系の実電流id,iqに基づき、モータジェネレータ10のトルクの推定値である推定トルクTeを算出する。一方、偏差算出部32では、推定トルクTeに対する要求トルクTdの差を算出する。位相設定部34は、偏差算出部32の出力の比例積分演算に基づき、インバータIVの出力電圧の回転2相座標系での位相δを設定する。ここでは、要求トルクTdに対して推定トルクTeが不足する場合に位相δを進角させて且つ、要求トルクTdに対して推定トルクTeが過剰となる場合に、位相δを遅角させるようにする。
<電流フィードバック制御部20の処理とトルクフィードバック制御部30の処理との切り替え処理>
本実施形態では、切替制御部46によって、電流フィードバック制御部20による制御を行うか、トルクフィードバック制御部30による制御を行うかを切り替える。図3に、切替制御部46の行う処理の手順を示す。この処理は、例えば所定周期で繰り返し実行される。
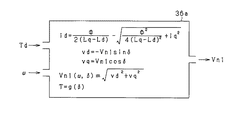
<トルクフィードバック制御部30の設計>
先の図2に示したように、トルクフィードバック制御部30では、要求トルクTdび電気角速度ωに基づき、ノルムVnを設定した。これにより、要求トルクTdが与えられた場合に、比較的自由にノルムVnを設定することができる。このため、例えばノルムVnを極力小さくすることで、電圧利用率を抑制することができる。そしてこの場合には、操作信号生成部38の生成する操作信号波形として、よりパルス数の多い波形を選択することなどができ、ひいてはインバータIVの出力電圧を正弦波形状の電圧により近づけることができる。このため、インバータIVの出力電圧の高調波歪を低減することができ、ひいては高調波電流を抑制することが可能となる。

以下、第2の実施形態について、先の第1の実施形態との相違点を中心に図面を参照しつつ説明する。
以下、第3の実施形態について、先の第1の実施形態との相違点を中心に図面を参照しつつ説明する。
以下、第4の実施形態について、先の第3の実施形態との相違点を中心に図面を参照しつつ説明する。
以下、第5の実施形態について、先の第1の実施形態との相違点を中心に図面を参照しつつ説明する。
なお、上記各実施形態は、以下のように変更して実施してもよい。
Claims (19)
- 直流電源の正極及び負極のそれぞれを回転機の端子に電気的に接続するスイッチング素子を備える電力変換回路を操作することで前記回転機の実際のトルクを要求トルクに制御する回転機の制御装置において、
前記回転機に対する要求トルク及び前記回転機の回転速度に応じて回転2相座標系における前記電力変換回路の出力電圧ベクトルのノルムを一義的に定めるノルム算出手段を備えて前記ノルムを設定するノルム設定手段と、
前記要求トルクと実際のトルクとの差に基づき、回転2相座標系における前記電力変換回路の出力電圧の位相を設定する位相設定手段と、
前記設定されるノルム及び位相に基づき前記スイッチング素子の操作信号を前記電力変換回路に出力する操作信号出力手段とを備えることを特徴とする回転機の制御装置。 - 前記操作信号は、電気角の1周期において、前記直流電源の正極及び負極のそれぞれに前記回転機が電気的に接続される各期間を同一とするものであることを特徴とする請求項1記載の回転機の制御装置。
- 前記操作信号は、電気角の1周期の中央に対して対称性を有する信号であることを特徴とする請求項1又は2記載の回転機の制御装置。
- 前記直流電源の電圧を取得する取得手段を更に備え、
前記操作信号出力手段は、前記直流電源の電圧に対する前記ノルムの相対的な大きさに基づき前記操作信号を設定することを特徴とする請求項1〜3のいずれか1項に記載の回転機の制御装置。 - 前記操作信号出力手段は、前記相対的な大きさのそれぞれに応じた電気角の1周期分の操作信号波形を記憶する記憶手段を備え、該記憶手段の記憶する操作信号波形のうちの該当するものを用いて前記操作信号を前記電力変換回路に出力することを特徴とする請求項4記載の回転機の制御装置。
- 前記位相設定手段は、前記要求トルクに対して前記実際のトルクが不足する場合、前記位相を進角させ、前記要求トルクに対して前記実際のトルクが過剰となる場合、前記位相を遅角させるものであり、
前記ノルム設定手段は、前記回転機のトルクを前記ノルム及び位相によって表現したモデル式の位相による偏微分が正となるとの条件を満たすように前記ノルムを設定するものであることを特徴とする請求項1〜5のいずれか1項に記載の回転機の制御装置。 - 前記ノルム設定手段は、d軸電流をゼロ以下とするように前記ノルムを設定するものであることを特徴とする請求項1〜6のいずれか1項に記載の回転機の制御装置。
- 前記ノルム設定手段は、q軸電流の符号が前記要求トルクの符号に一致するように前記ノルムを設定することを特徴とする請求項1〜7のいずれか1項に記載の回転機の制御装置。
- 前記ノルム設定手段は、最小の電流で最大のトルクを生成するように前記ノルムを設定することを特徴とする請求項1〜8のいずれか1項に記載の回転機の制御装置。
- 前記ノルム設定手段は、前記電力変換回路の出力電圧のうちの前記回転機の誘起電圧によって相殺される電圧成分を除いた部分に応じて生じる電流によって最大のトルクを生成するように前記ノルムを設定することを特徴とする請求項1〜8のいずれか1項に記載の回転機の制御装置。
- 前記ノルム設定手段は、d軸電流をゼロとするように前記ノルムを設定するものであることを特徴とする請求項1〜8のいずれか1項に記載の回転機の制御装置。
- 前記ノルム設定手段は、要求トルクを入力として且つ前記ノルムを回転速度で除算した値である速度規格化ノルムを出力とする写像を利用して前記ノルムを設定することを特徴とする請求項8〜11のいずれか1項に記載の回転機の制御装置。
- 前記操作信号出力手段は、前記電力変換回路の電圧利用率が所定以上となる場合に前記操作信号を出力するものであることを特徴とする請求項1〜12のいずれか1項に記載の回転機の制御装置。
- 前記回転機を実際に流れる電流を前記要求トルクに応じた電流の指令値にフィードバック制御する電流フィードバック制御手段を更に備え、
前記電圧利用率が低い領域では、前記電流フィードバック制御によって前記電力変換回路を操作することを特徴とする請求項13記載の回転機の制御装置。 - 前記電流フィードバック制御手段は、前記フィードバック制御のための操作量として前記回転機の電圧の指令値を算出する手段を備え、
前記ノルム設定手段は、前記操作信号出力手段による前記電力変換回路の操作への切り替えに際し、前記電流フィードバック制御手段の算出する電圧の指令値に基づき前記ノルムの初期値を設定することを特徴とする請求項14記載の回転機の制御装置。 - 前記ノルム設定手段は、前記ノルムの初期値とは独立に前記回転機の回転速度及び前記要求トルクに基づき前記ノルムを算出するノルム算出手段と、当該ノルム設定手段の設定するノルムを前記初期値から前記ノルム算出手段の算出するノルムへと徐々に変化させる変化手段とを備えることを特徴とする請求項15記載の回転機の制御装置。
- 前記電流フィードバック制御手段は、前記フィードバック制御のための操作量として前記回転機の電圧の指令値を算出する手段を備え、
前記操作信号出力手段による前記電力変換回路の操作から前記電流フィードバック制御手段による前記電力変換回路の操作へと切り替えるに際し、前記電流フィードバック制御手段による前記回転機に対する電圧の指令値の初期値を、前記ノルム設定手段の設定するノルム及び前記位相設定手段の設定する位相に基づき設定することを特徴とする請求項14〜16のいずれか1項に記載の回転機の制御装置。 - 前記操作信号出力手段によって操作信号が前記電力変換回路に出力されている状況下、前記回転機の回転速度の変化量が第1の規定量以下であって且つ前記要求トルクの変化量が第2の規定量以下であるにもかかわらず、前記回転機を流れる電流が閾値以上となる場合、前記電力変換回路の出力電圧ベクトルのノルムを制限する制限手段を更に備えることを特徴とする請求項1〜17のいずれか1項に記載の回転機の制御装置。
- 請求項1〜18のいずれか1項に記載の回転機の制御装置と、
前記電力変換回路とを備えることを特徴とする回転機の制御システム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008072917A JP4582168B2 (ja) | 2008-03-21 | 2008-03-21 | 回転機の制御装置、及び回転機の制御システム |
| CN2009101387773A CN101540581B (zh) | 2008-03-21 | 2009-03-20 | 用于改善旋转机械控制的装置 |
| CN2012102342593A CN102751932A (zh) | 2008-03-21 | 2009-03-20 | 用于改善旋转机械控制的装置 |
| US12/408,009 US8018185B2 (en) | 2008-03-21 | 2009-03-20 | Apparatus for carrying out improved control of rotary machine |
| US13/137,366 US8288980B2 (en) | 2008-03-21 | 2011-08-09 | Apparatus for carrying out improved control of rotary machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008072917A JP4582168B2 (ja) | 2008-03-21 | 2008-03-21 | 回転機の制御装置、及び回転機の制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009232531A JP2009232531A (ja) | 2009-10-08 |
| JP4582168B2 true JP4582168B2 (ja) | 2010-11-17 |
Family
ID=41088196
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008072917A Active JP4582168B2 (ja) | 2008-03-21 | 2008-03-21 | 回転機の制御装置、及び回転機の制御システム |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US8018185B2 (ja) |
| JP (1) | JP4582168B2 (ja) |
| CN (2) | CN101540581B (ja) |
Families Citing this family (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4582168B2 (ja) | 2008-03-21 | 2010-11-17 | 株式会社デンソー | 回転機の制御装置、及び回転機の制御システム |
| JP4710963B2 (ja) * | 2008-11-28 | 2011-06-29 | 株式会社デンソー | 回転機の制御装置及び制御システム |
| JP5515384B2 (ja) * | 2009-04-15 | 2014-06-11 | アイシン精機株式会社 | 交流モータの制御装置および制御方法 |
| JP2011041343A (ja) * | 2009-08-06 | 2011-02-24 | Toshiba Corp | モータ駆動装置及びモータ駆動方法 |
| DE102010001774A1 (de) * | 2010-02-10 | 2011-08-11 | Robert Bosch GmbH, 70469 | Verfahren zur Reduzierung des Anlaufstromes einer mit Blockkommutierung betriebenen mehrphasigen Maschine |
| JP2011200105A (ja) * | 2010-02-26 | 2011-10-06 | Denso Corp | 回転機の制御装置 |
| WO2012011155A1 (ja) * | 2010-07-23 | 2012-01-26 | 三菱電機株式会社 | 交流回転機の制御装置および制御方法 |
| EP2600518B1 (en) * | 2010-07-27 | 2019-10-09 | Mitsubishi Electric Corporation | Control apparatus for ac rotating machine |
| FR2963510B1 (fr) * | 2010-08-02 | 2012-10-05 | Alstom Transport Sa | Chaine de traction pour un vehicule de transport, notamment ferroviaire, et procede de commande d'une telle chaine |
| JP5549537B2 (ja) * | 2010-10-26 | 2014-07-16 | 株式会社デンソー | 回転機の制御装置 |
| JP5353867B2 (ja) * | 2010-12-02 | 2013-11-27 | 株式会社デンソー | 回転機の制御装置 |
| JP5316551B2 (ja) | 2011-01-07 | 2013-10-16 | 株式会社デンソー | 回転機の制御装置 |
| JP5696572B2 (ja) * | 2011-04-12 | 2015-04-08 | 株式会社デンソー | 回転機の制御装置 |
| US9203335B2 (en) * | 2011-04-21 | 2015-12-01 | Nissan Motor Co., Ltd. | Control device for electric motor and control method for electric motor |
| JP5808199B2 (ja) * | 2011-08-30 | 2015-11-10 | 三菱重工業株式会社 | モータ制御装置及びモータ駆動システム |
| US8860342B2 (en) | 2011-09-15 | 2014-10-14 | Curtiss-Wright Electro-Mechanical Corporation | System and method for controlling a permanent magnet motor |
| CN104245408B (zh) * | 2012-04-18 | 2017-04-12 | 日产自动车株式会社 | 电动车辆的控制装置以及电动车辆的控制方法 |
| JP5565432B2 (ja) * | 2012-04-20 | 2014-08-06 | 株式会社デンソー | 回転機の制御装置 |
| US8773056B2 (en) * | 2012-06-11 | 2014-07-08 | Caterpillar Inc. | FPDA closed loop electric drives controls |
| GB2503040B (en) * | 2012-06-15 | 2020-05-06 | Danfoss Drives As | Variable torque angle for electric motor |
| GB2503039B (en) * | 2012-06-15 | 2020-05-27 | Danfoss Drives As | Method for controlling a synchronous reluctance electric motor |
| US9893657B2 (en) | 2012-09-07 | 2018-02-13 | Ford Global Technologies, Llc | Electric motor mode control |
| US9929688B2 (en) | 2012-09-07 | 2018-03-27 | Ford Global Technologies, Llc | Electric machine torque capability determination |
| US9735720B2 (en) | 2012-09-07 | 2017-08-15 | Ford Global Technologies, Llc | Electric motor torque control |
| US9369078B2 (en) * | 2013-03-11 | 2016-06-14 | Steering Solutions Ip Holding Corporation | Method of current reference generation for a motor |
| US9461574B2 (en) | 2013-03-12 | 2016-10-04 | Steering Solutions Ip Holding Corporation | Motor control system for determining a reference d-axis current and a q-axis current |
| US9531311B2 (en) | 2013-03-13 | 2016-12-27 | Steering Solutions Ip Holding Corporation | Generation of a current reference to control a brushless motor |
| JP6243142B2 (ja) | 2013-05-21 | 2017-12-06 | Ntn株式会社 | 電気自動車の制御装置 |
| JP5962591B2 (ja) * | 2013-06-03 | 2016-08-03 | 株式会社デンソー | モータ駆動装置 |
| US9344026B2 (en) * | 2013-07-23 | 2016-05-17 | Atieva, Inc. | Induction motor flux and torque control |
| JP6211353B2 (ja) * | 2013-09-03 | 2017-10-11 | Ntn株式会社 | 電気自動車の制御装置 |
| KR101500397B1 (ko) | 2013-12-24 | 2015-03-19 | 현대자동차 주식회사 | 전기 차량의 제어 방법 |
| JP6241330B2 (ja) * | 2014-03-11 | 2017-12-06 | 日産自動車株式会社 | モータ制御装置 |
| US9481262B2 (en) * | 2014-04-02 | 2016-11-01 | GM Global Technology Operations LLC | Electric vehicle and method |
| JP6015712B2 (ja) | 2014-05-19 | 2016-10-26 | 株式会社デンソー | 回転機の制御装置 |
| JP6418252B2 (ja) * | 2014-12-25 | 2018-11-07 | アイシン・エィ・ダブリュ株式会社 | 回転電機制御装置 |
| JP6361569B2 (ja) * | 2015-05-07 | 2018-07-25 | 株式会社デンソー | 回転電機の制御装置 |
| JP6428491B2 (ja) * | 2015-06-01 | 2018-11-28 | 株式会社デンソー | 回転電機の制御装置 |
| CN105892539A (zh) * | 2015-08-22 | 2016-08-24 | 滁州职业技术学院 | 一种二线制电动调压器 |
| JP6565531B2 (ja) * | 2015-09-18 | 2019-08-28 | シンフォニアテクノロジー株式会社 | インバータ制御装置 |
| JP6493164B2 (ja) | 2015-11-06 | 2019-04-03 | 株式会社デンソー | 回転電機駆動システム |
| JP6478114B2 (ja) * | 2015-11-06 | 2019-03-06 | 株式会社デンソー | 回転電機駆動システム |
| JP2017093097A (ja) | 2015-11-06 | 2017-05-25 | 株式会社デンソー | 回転電機 |
| JP6572124B2 (ja) * | 2015-12-22 | 2019-09-04 | オークマ株式会社 | モータ制御装置 |
| CN105553367B (zh) * | 2016-02-03 | 2018-02-13 | 深圳创维空调科技有限公司 | 一种基于空调的pg电机调速方法、调速系统及空调 |
| JP6372497B2 (ja) * | 2016-02-18 | 2018-08-15 | 株式会社デンソー | インバータ制御装置 |
| US9985483B2 (en) | 2016-05-24 | 2018-05-29 | Abb Schweiz Ag | Electro-dynamic machine, system and method |
| CN108023511B (zh) * | 2016-10-28 | 2020-10-02 | 沈阳高精数控智能技术股份有限公司 | 砂带磨床恒力磨削控制系统中砂带轮收放卷的控制方法 |
| CN106849806B (zh) * | 2017-04-13 | 2023-05-23 | 常州寻心电子科技有限公司 | 一种电动车控制器及控制方法 |
| FR3078214B1 (fr) * | 2018-02-22 | 2020-03-20 | Valeo Equipements Electriques Moteur | Procede d'assistance au calage d'un moteur thermique par une machine electrique tournante |
| US10526008B1 (en) | 2018-07-31 | 2020-01-07 | Steering Solutions Ip Holding Corporation | Machine current limiting for permanent magnet synchronous machines |
| JP7112593B2 (ja) * | 2019-04-12 | 2022-08-03 | 株式会社日立産機システム | 電力変換装置、及び、その制御方法 |
| US11095240B2 (en) * | 2019-07-18 | 2021-08-17 | GM Global Technology Operations LLC | Electric motor in propulsion system with auxiliary power generation |
| CN110752795B (zh) * | 2019-11-01 | 2021-05-07 | 中国第一汽车股份有限公司 | 一种永磁同步电机降额控制方法、装置及永磁同步电机 |
| GB202000939D0 (en) * | 2020-01-22 | 2020-03-04 | Mclaren Automotive Ltd | Motor control unit |
| CN111506966B (zh) * | 2020-04-20 | 2024-03-22 | 成都飞机工业(集团)有限责任公司 | 工艺协调模型的判别方法、装置、电子设备和存储介质 |
| CN112270273A (zh) * | 2020-10-30 | 2021-01-26 | 湘潭大学 | 基于gcn和wpt-md的风力发电机故障部位识别方法 |
| TWI810804B (zh) * | 2022-01-28 | 2023-08-01 | 致揚科技股份有限公司 | 具有校正補償的磁浮系統以及用於磁浮系統的校正補償方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03106217A (ja) * | 1989-09-20 | 1991-05-02 | Hitachi Ltd | 絶縁ゲートトランジスタの駆動回路,過電流検出回路及び半導体装置 |
| JPH0914148A (ja) * | 1995-06-27 | 1997-01-14 | Ebara Densan:Kk | ポンプの運転制御システム |
| JPH0947100A (ja) * | 1995-07-31 | 1997-02-14 | Fuji Electric Co Ltd | 永久磁石形同期電動機の制御装置 |
| JPH10243699A (ja) * | 1997-02-27 | 1998-09-11 | Fuji Electric Co Ltd | 同期電動機の制御装置 |
| JPH1118496A (ja) * | 1997-06-18 | 1999-01-22 | Hitachi Ltd | 電気車の制御装置および制御方法 |
| JPH11285288A (ja) * | 1998-03-26 | 1999-10-15 | Toyota Motor Corp | モータ制御装置およびモータ制御方法 |
| JPH11299297A (ja) * | 1998-04-15 | 1999-10-29 | Fuji Electric Co Ltd | 永久磁石同期電動機の制御装置 |
| JP2000050689A (ja) * | 1998-07-24 | 2000-02-18 | Toyota Motor Corp | 交流電動機の駆動制御装置 |
| JP2000245196A (ja) * | 1999-02-19 | 2000-09-08 | Sanyo Electric Co Ltd | 電動圧縮機用インバータ制御装置 |
| JP2006262590A (ja) * | 2005-03-16 | 2006-09-28 | Honda Motor Co Ltd | ブラシレスdcモータの制御装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1720242A1 (en) * | 2003-11-26 | 2006-11-08 | Nsk Ltd., | Device for controlling motor-driven power steering device |
| JP4606033B2 (ja) * | 2004-01-30 | 2011-01-05 | 三菱電機株式会社 | 同期モータの回転子位置検出調整方法 |
| JP4116595B2 (ja) * | 2004-06-30 | 2008-07-09 | ファナック株式会社 | モータ制御装置 |
| JP4706324B2 (ja) * | 2005-05-10 | 2011-06-22 | トヨタ自動車株式会社 | モータ駆動システムの制御装置 |
| JP4754378B2 (ja) * | 2006-03-22 | 2011-08-24 | 本田技研工業株式会社 | 電動機の制御装置 |
| JP4697017B2 (ja) * | 2006-04-14 | 2011-06-08 | 株式会社デンソー | 多相回転電機の制御装置 |
| JP4754417B2 (ja) * | 2006-06-26 | 2011-08-24 | 本田技研工業株式会社 | 永久磁石型回転電機の制御装置 |
| JP4745158B2 (ja) * | 2006-07-24 | 2011-08-10 | 本田技研工業株式会社 | 電動機の制御装置 |
| JP4582168B2 (ja) | 2008-03-21 | 2010-11-17 | 株式会社デンソー | 回転機の制御装置、及び回転機の制御システム |
-
2008
- 2008-03-21 JP JP2008072917A patent/JP4582168B2/ja active Active
-
2009
- 2009-03-20 CN CN2009101387773A patent/CN101540581B/zh active Active
- 2009-03-20 CN CN2012102342593A patent/CN102751932A/zh active Pending
- 2009-03-20 US US12/408,009 patent/US8018185B2/en active Active
-
2011
- 2011-08-09 US US13/137,366 patent/US8288980B2/en active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03106217A (ja) * | 1989-09-20 | 1991-05-02 | Hitachi Ltd | 絶縁ゲートトランジスタの駆動回路,過電流検出回路及び半導体装置 |
| JPH0914148A (ja) * | 1995-06-27 | 1997-01-14 | Ebara Densan:Kk | ポンプの運転制御システム |
| JPH0947100A (ja) * | 1995-07-31 | 1997-02-14 | Fuji Electric Co Ltd | 永久磁石形同期電動機の制御装置 |
| JPH10243699A (ja) * | 1997-02-27 | 1998-09-11 | Fuji Electric Co Ltd | 同期電動機の制御装置 |
| JPH1118496A (ja) * | 1997-06-18 | 1999-01-22 | Hitachi Ltd | 電気車の制御装置および制御方法 |
| JPH11285288A (ja) * | 1998-03-26 | 1999-10-15 | Toyota Motor Corp | モータ制御装置およびモータ制御方法 |
| JPH11299297A (ja) * | 1998-04-15 | 1999-10-29 | Fuji Electric Co Ltd | 永久磁石同期電動機の制御装置 |
| JP2000050689A (ja) * | 1998-07-24 | 2000-02-18 | Toyota Motor Corp | 交流電動機の駆動制御装置 |
| JP2000245196A (ja) * | 1999-02-19 | 2000-09-08 | Sanyo Electric Co Ltd | 電動圧縮機用インバータ制御装置 |
| JP2006262590A (ja) * | 2005-03-16 | 2006-09-28 | Honda Motor Co Ltd | ブラシレスdcモータの制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110298403A1 (en) | 2011-12-08 |
| CN102751932A (zh) | 2012-10-24 |
| CN101540581A (zh) | 2009-09-23 |
| JP2009232531A (ja) | 2009-10-08 |
| US8288980B2 (en) | 2012-10-16 |
| CN101540581B (zh) | 2012-08-15 |
| US20090237021A1 (en) | 2009-09-24 |
| US8018185B2 (en) | 2011-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4582168B2 (ja) | 回転機の制御装置、及び回転機の制御システム | |
| JP4458174B2 (ja) | 回転機の制御装置、及び回転機の制御システム | |
| JP5297953B2 (ja) | 電動車両の電動機駆動システム | |
| US8427087B2 (en) | Control device for AC motor | |
| US8232753B2 (en) | Control device for electric motor drive apparatus | |
| JP4635703B2 (ja) | モータ駆動システムの制御装置 | |
| JP4329855B2 (ja) | 交流モータの制御装置および交流モータの制御方法 | |
| JP2010161907A (ja) | モータ駆動制御システムの制御装置 | |
| JP2010011600A (ja) | 回転機の制御装置、及び回転機の制御システム | |
| JP2006320039A (ja) | モータ駆動システムの制御装置 | |
| JP2007282297A (ja) | 多相回転電機の制御装置 | |
| JP2006311770A (ja) | モータ駆動システムの制御装置 | |
| US20140225540A1 (en) | Control apparatus for ac motor | |
| JP4775168B2 (ja) | 3相回転機の制御装置 | |
| US20140176029A1 (en) | Vehicle and control device for vehicle | |
| JP5955761B2 (ja) | 車両の制御装置 | |
| JP5391698B2 (ja) | 回転機の制御装置及び制御システム | |
| JP5233427B2 (ja) | 回転機の制御装置、及び回転機の制御システム | |
| JP5181551B2 (ja) | 多相回転機の制御装置 | |
| JP2011067010A (ja) | 車両のモータ駆動装置 | |
| JP5510444B2 (ja) | 回転機の制御装置 | |
| JP5233685B2 (ja) | 回転機の制御装置及び制御システム | |
| JP2014050123A (ja) | ロータ位置推定装置、電動機制御システムおよびロータ位置推定方法 | |
| JP5326444B2 (ja) | 回転機の制御装置 | |
| JP2012065549A (ja) | 回転機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090727 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100803 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100816 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4582168 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130910 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |