JP4580167B2 - 乗用型作業車 - Google Patents
乗用型作業車 Download PDFInfo
- Publication number
- JP4580167B2 JP4580167B2 JP2003430604A JP2003430604A JP4580167B2 JP 4580167 B2 JP4580167 B2 JP 4580167B2 JP 2003430604 A JP2003430604 A JP 2003430604A JP 2003430604 A JP2003430604 A JP 2003430604A JP 4580167 B2 JP4580167 B2 JP 4580167B2
- Authority
- JP
- Japan
- Prior art keywords
- operated
- transmission
- continuously variable
- lever
- variable transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Landscapes
- Transplanting Machines (AREA)
- Arrangement And Mounting Of Devices That Control Transmission Of Motive Force (AREA)
Description
前述のように、走行用のブレーキが制動側に操作されて機体が停止した場合、走行用の無段変速装置が高速側に残されていると、エンジンが停止してしまうので、特許文献1の構造では、ブレーキペダルが踏み位置に操作されると、走行用のブレーキが制動側に操作されるのに加えて、走行用の無段変速装置が中立停止位置に操作されるように構成することにより、エンジンの停止を回避している。
この場合、操縦者が機体から降りて機体の外側から操縦する形態において、特許文献1の構造によると、機体の外側の操縦者が例えばブレーキペダルを踏み位置に操作して機体を停止させると、走行用の無段変速装置が中立停止位置に操作されるので、機体の外側の操縦者がブレーキペダルを戻し操作して、機体を再び発進させようとしても、走行用の無段変速装置が中立停止位置に操作されており機体は発進しない。
本発明は乗用型作業車において、操縦者が機体から降りて機体の外側から操縦する形態の場合、機体の停止及び発進が容易に行えるように構成することを目的としている。
(構成)
本発明の第1特徴は、乗用型作業車において次のように構成することにある。
エンジンの動力を主クラッチから走行用の静油圧式無段変速装置に伝達するように構成し、前記主クラッチを伝動及び遮断状態に操作自在な操作ペダルと操作レバーとを備える。
前記静油圧式無段変速装置を中立停止位置、前進の高速側及び後進の高速側に無段階に変速自在に構成して、前記静油圧式無段変速装置を操作するもので人為的に操作される変速操作具を備える。
前記操作ペダルを踏み位置に操作すると、前記主クラッチが遮断状態に操作され、前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に操作されるように、かつ、前記操作ペダルを戻し操作すると、前記主クラッチが伝動状態に復帰され、前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に維持され、さらに前記主クラッチを遮断状態に操作することなく前記変速操作具による前記静油圧式無段変速装置の前記所定の低速位置からの前進の高速側及び後進の高速側への操作が許容されるように、前記操作ペダルと前記変速操作具とを、相手側の相対移動を許容する長孔を介して連係する。
前記操作レバーを操作すると、前記主クラッチが遮断状態に操作され、前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に操作されるように、かつ、前記操作レバーを戻し操作すると、前記主クラッチが伝動状態に復帰され、前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に維持され、さらに前記主クラッチを遮断状態に操作することなく前記変速操作具による前記静油圧式無段変速装置の前記所定の低速位置からの前進の高速側及び後進の高速側への操作が許容されるように、前記操作レバーと前記変速操作具とを、相手側の相対移動を許容する前記長孔を介して連係する。
前記操作ペダルを運転部において操作可能に、かつ、前記操作レバーを機体から降りてその機体の前方から操作可能に配置構成してある。
本発明の第1特徴によると、操縦者が機体から降りて機体の外側から操縦する形態において、機体の外側の操縦者が主クラッチを遮断状態に操作し、静油圧式無段変速装置を中立停止位置の付近の所定の低速位置に操作することができるのであり、これにより機体が停止する。この後、機体の外側の操縦者が主クラッチを伝動状態に操作する際に、静油圧式無段変速装置が所定の低速位置に操作されているので、機体は低速で発進することになる。
このように本発明の第1特徴によると、機体の外側の操縦者が主クラッチを伝動状態に操作する際に、特許文献1の構造のように静油圧式無段変速装置を中立停止位置から低速位置に操作しなくても、機体を低速で発進させることができる。
静油圧式無段変速装置を備えた場合、静油圧式無段変速装置を操作するもので、人為的に操作される変速操作具(変速レバーや変速ペダル等)を備えることが多い。
本発明の第1特徴によれば、主クラッチが遮断状態に操作され、静油圧式無段変速装置が中立停止位置の付近の所定の低速位置に操作されるのに加えて、静油圧式無段変速装置の所定の低速位置に対応する操作位置に変速操作具が操作されるので、操縦者は変速操作具の移動を目視することによって、静油圧式無段変速装置が所定の低速位置に操作されたことを認識することができる。
静油圧式無段変速装置は一般に、中立停止位置から最高速位置まで無段階に連続的に操作することができるので、静油圧式無段変速装置において、中立停止位置の付近の所定の低速位置を現出することが容易に確実に行われる。
本発明の第1特徴によると、乗用型作業車において、操縦者が機体から降りて機体の外側から操縦する形態の場合、機体の外側の操縦者が主クラッチを遮断状態に操作し静油圧式無段変速装置を中立停止位置の付近の所定の低速位置に操作してから、再び主クラッチを伝動状態に操作する際に、静油圧式無段変速装置を中立停止位置から低速位置に操作しなくても機体を低速で発進させることができるようになり、機体の停止及び発進が容易に行えるようになって、乗用型作業車の操作性を向上させることができた。
本発明の第1特徴によると、操縦者が変速操作具の移動を目視することによって、静油圧式無段変速装置が所定の低速位置に操作されたことを認識することができるので、静油圧式無段変速装置の状態の操縦者の誤解を少なくすることができて、操縦者の誤解による誤操作を少なくすることができた。
本発明の第1特徴によると、中立停止位置の付近の所定の低速位置を現出することが容易に確実に行われるので、乗用型作業車の操作性を向上させることができた。
(構成)
本発明の第2特徴は、本発明の第1特徴の乗用型作業車において次のように構成することにある。
走行用のブレーキを備える。前記主クラッチが遮断状態に操作され、前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に操作されると、前記走行用のブレーキが制動側に操作されるように構成する。
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
本発明の第2特徴によれば、主クラッチが遮断状態に操作され、静油圧式無段変速装置が中立停止位置の付近の所定の低速位置に操作されるのに加えて、走行用のブレーキが制動側に操作されるので、機体の停止が確実に行われる。
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第2特徴によれば、機体の停止が確実に行われるようになって、乗用型作業車の操作性を向上させることができた。
(構成)
本発明の第3特徴は、本発明の第1又は第2特徴の乗用型作業車において次のように構成することにある。
前記操作ペダルをボンネットの横側部のステップに備え、前記操作ペダルに前記操作レバーを備えて、前記ステップに機体前後方向の横軸芯周りで保持部材を左右揺動自在に支持し、
前記主クラッチが遮断状態に操作され前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に操作される状態を、前記保持部材の左右揺動操作により保持及び保持解除自在に構成する。
本発明の第3特徴によると、本発明の第1又は第2特徴と同様に前項[I][II]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
本発明の第3特徴によると、操縦者が機体から降りて機体の外側から操縦する形態において、主クラッチが遮断状態に操作され静油圧式無段変速装置が中立停止位置の付近の所定の低速位置に操作される状態を、機体の外側の操縦者が保持部材により保持してやることにより、機体の外側の操縦者が手を離しても機体の停止を維持することができる。
本発明の第3特徴によると、本発明の第1又は第2特徴と同様に前項[I][II]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第3特徴によると、機体の外側の操縦者が手を離しても、機体の停止を維持することができるようになって、乗用型作業車の操作性を向上させることができた。この場合、機体に乗車した操縦者も同様に、主クラッチが遮断状態に操作され静油圧式無段変速装置が中立停止位置の付近の所定の低速位置に操作される状態を、保持部材により保持することができる。
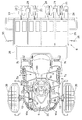
図1に示すように、前輪1及び後輪2で支持された機体に運転部3が備えられており、機体の後部にリンク機構4及び油圧シリンダ5を介して苗植付装置6が昇降駆動自在に支持されて、乗用型田植機が構成されている。
次に、運転部3の付近の構造について説明する。
図1,2,3に示すように、フロア7の後方の上方に運転座席8が備えられ、エンジン101を覆うボンネット9がフロア7の前方に備えられており、ボンネット9の右及び左の横側部に、フロア7につながる右及び左のステップ10が備えられている。ボンネット9は後述するハンドルポスト57([3]及び図6参照)に固定された上部9c、フロア7に着脱自在に取り付けられた後部9b、及び上下に開閉自在及び着脱自在に上部9cに取り付けられた前部9aを備えて構成されている。
次に、昇降レバー12について説明する。
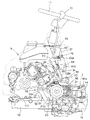
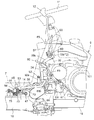
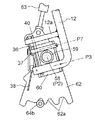
図7及び図8に示すように、ミッションケース16の上部にパワーステアリング機構34が固定され、板材を箱状に折り曲げて構成されたハンドルポスト57がパワーステアリング機構34の上部に固定されており、ハンドルポスト57の上部に操縦ハンドル11が支持されて、操縦ハンドル11がボンネット9の上部に位置している。これにより、操縦ハンドル11によりパワーステアリング機構34を介して前輪1を操向操作する。機体左右方向に向く支持軸58がハンドルポスト57に貫通して固定され、支持軸58がハンドルポスト57から右及び左横方に突出している。図11及び図12に示すように、円筒軸59が支持軸58の横軸芯P2周りに相対回転自在に外嵌されており、板材をコ字状に折り曲げて構成された支持ブラケット60が円筒軸59に固定されている。昇降レバー12が支持ブラケット60の軸芯P3周りに揺動自在に支持されている。
次に、昇降レバー12と制御弁66との連係について説明する。
図7,8,10,11に示すように、油圧シリンダ5(図1参照)に作動油を給排操作する制御弁66がミッションケース16の右の横側部に固定されており、制御弁66のスプール66aが前方に突出している。図11に示す状態は制御弁66のスプール66aが中立位置に位置している状態で、油圧シリンダ5が停止しており、制御弁66のスプール66aが押し込まれると(制御弁66(スプール66a)の上昇位置)(図11の紙面左方)、油圧シリンダ5に作動油が供給され、油圧シリンダ5が収縮作動して、苗植付装置6が上昇駆動される。制御弁66のスプール66aが突出すると(制御弁66(スプール66a)の下降位置)(図11の紙面右方)、油圧シリンダ5から作動油が排出され、油圧シリンダ5が伸長作動して、苗植付装置6が下降駆動されるのであり、制御弁66に内装されたバネ(図示せず)により、制御弁66のスプール66aが突出側(制御弁66(スプール66a)の下降位置)に付勢されている。
次に、昇降レバー12を中立位置、上昇位置及び下降位置に操作した場合について説明する。
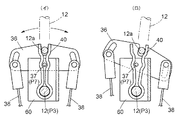
図10及び図11に示す状態は昇降レバー12を中立位置に操作している状態であり、制御弁66(スプール66a)が中立位置に操作されて、油圧シリンダ5が停止し、植付及び施肥クラッチ76,77が遮断状態に操作されて、苗植付装置6が停止し、繰り出し部27が停止している。連係ロッド69の端部69aが第1操作板67の長孔67aの中程に位置し、第2操作板68の長孔68aの下端に位置している。
次に、昇降レバー12を植付位置に操作した場合について説明する。
前項[5]に記載のように、昇降レバー12を下降位置に操作して苗植付装置6が田面まで下降駆動された状態で、昇降レバー12を植付位置に操作すると、図10及び図11に示すように、連係ロッド69の端部69aが第1操作板67の長孔67aの上端に達して、第1操作板67が横軸芯P5周りに紙面反時計方向に操作される。
次に、主変速レバー13について説明する。
図6,8,15に示すように、操作板82が支持軸58の横軸芯P2周りに回転自在に支持され、操作板82に固定された支持ブラケット82aの軸芯P8周りに、主変速レバー13が揺動自在に支持されており、主変速レバー13がレバーガイド85から上方に延出されている。
次に、主変速レバー13を後進変速経路88の始端部88aに操作すると、植付及び施肥クラッチ76,77が遮断状態に操作される構造について説明する。
図10に示すように、苗植付装置6の所定位相に関係なく直ちに植付クラッチ76を遮断状態に操作する操作軸48が備えられており、操作軸48がミッションケース16から上方に突出して、操作軸48に操作アーム48aが固定されている。図8及び図10に示すように、操作軸92の端部に固定された操作アーム92aと、操作軸48の操作アーム48aとに亘って連係ロッド98が接続されている。
次に、操作ペダル14と主クラッチ52及びブレーキ54との連係構造について説明する。
図7,9,22(イ),23に示すように、フロア7の下側において機体左右方向に沿ってフレーム部材44がミッションケース16に固定されており、フレーム部材44は上面部分44a(フレーム部材44の第1部分に相当)、及び前面部分44b(フレーム部材44の第2部分に相当)を備えて、断面逆L字状に形成されている。板材を正面視で幅広の逆U字状(図23参照)に折り曲げて支持部材45が形成されており、フレーム部材44の上面部分44aに支持部材45が固定され、フロア7が支持部材45に支持されている。制御弁66から油圧シリンダ5(図1参照)に作動油を供給する油圧ホース46、及び油圧シリンダ5からの作動油を制御弁66に戻す油圧ホース49が備えられており、油圧ホース46,49がフレーム部材44と支持部材45との間に挿入されている(支持部材45の両端の仕切り部の間に油圧ホース46,49が挿入された状態に相当)。
次に、操作ペダル14の基部付近について説明する。
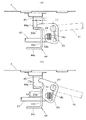
図22(イ)(ロ)に示すように、接当部材53に第1接当部分53a及び第2接当部分53bが形成されており、第1接当部分53aの長さL1(面積)よりも、第2接当部分53bの長さL2(面積)が長いもの(大きなもの)に形成されている。これにより、図22(イ)に示すように、操作ペダル14が戻し位置に位置している状態において、接当部材53の第1接当部分53aがフレーム部材44の上面部分44aに接当して、操作ペダル14が戻し位置で位置決めされる。図22(ロ)に示すように、操作ペダル14が踏み位置に位置している状態において、接当部材53の第2接当部分53bがフレーム部材44の前面部分44bに接当して、操作ペダル14が踏み位置で位置決めされる。
次に、操作ペダル14を踏み位置に操作すると、主変速レバー13及び静油圧式無段変速装置31の操作アーム31cが中立停止位置の付近の所定の低速位置に操作される構造について説明する。
図18に示すように、操作ペダル14の操作アーム14aに長孔14cが形成され、図6,9,15に示すように、操作部材93に連係ロッド96が接続されており、連係ロッド96の端部のピン96aが操作ペダル14の長孔14cに挿入されている。
次に操作ペダル14を戻し位置に操作しても、図21に示すように、板バネ89の端部89aが操作板82の凹部82bに係合する係合作用によって(図15参照)、主変速レバー13及び静油圧式無段変速装置31の操作アーム31cが中立停止位置の付近の所定の低速位置に残される。
この場合、ロックレバー18を操作レバー17の係合部材17aから離れる側に付勢するバネ97が備えられており、単に操作ペダル14が踏み位置に操作されただけでは、ロックレバー18が操作レバー17の係合部材17aの前部に係合することはなく、操作ペダル14を戻し位置に支障なく操作することができる。
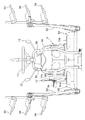
前述の[発明を実施するための最良の形態]に対して、異なる型式(エンジン101が少し小型になり機体の全長が少し短くなる型式)の乗用型田植機では、図4に示す同じフロア7と右及び左のステップ10を使用しており、図5(ロ)に示すように、フロア7の連結孔7cと右及び左のステップ10の連結孔10cとをボルト(図示せず)によって連結し、フロア7と右及び左のステップ10を機体に取り付けて、図2に示すフロアマット100は使用しない。
この場合、ダンパー部材63をハンドルポスト106に取り付けた後、誤ってダンパー部材63をレバーガイド85の切欠き部85aに挿入しても、ダンパー部材63を係合板62に接続孔62cに接続することはできない。
ダンパー部材63をハンドルポスト106に取り付けてレバーガイド85の切欠き部85bに位置させた後、誤ってダンパー部材63を係合板62の接続孔62bに接続したとしても、前項[8]に記載のように、操作軸64の操作アーム64a及びローラー64bが係合板62の凹部62aから下方に離れ、ダンパー部材63の付勢力によって昇降レバー12が上昇位置に操作された際、係合板62が操作軸64のローラー64bから図11及び図12の紙面右方に離れてしまう。以上の構造により、ダンパー部材63の取付間違いが少なくなる。
9 ボンネット
10 ステップ
13 変速操作具
14 操作ペダル
17 操作レバー
18 保持部材
31 静油圧式無段変速装置
52 主クラッチ
54 走行用のブレーキ
101 エンジン
P11 横軸芯
Claims (3)
- エンジンの動力を主クラッチから走行用の静油圧式無段変速装置に伝達するように構成し、前記主クラッチを伝動及び遮断状態に操作自在な操作ペダルと操作レバーとを備え、
前記静油圧式無段変速装置を中立停止位置、前進の高速側及び後進の高速側に無段階に変速自在に構成して、前記静油圧式無段変速装置を操作するもので人為的に操作される変速操作具を備え、
前記操作ペダルを踏み位置に操作すると、前記主クラッチが遮断状態に操作され、前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に操作されるように、かつ、前記操作ペダルを戻し操作すると、前記主クラッチが伝動状態に復帰され、前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に維持され、さらに前記主クラッチを遮断状態に操作することなく前記変速操作具による前記静油圧式無段変速装置の前記所定の低速位置からの前進の高速側及び後進の高速側への操作が許容されるように、前記操作ペダルと前記変速操作具とを、相手側の相対移動を許容する長孔を介して連係すると共に、
前記操作レバーを操作すると、前記主クラッチが遮断状態に操作され、前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に操作されるように、かつ、前記操作レバーを戻し操作すると、前記主クラッチが伝動状態に復帰され、前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に維持され、さらに前記主クラッチを遮断状態に操作することなく前記変速操作具による前記静油圧式無段変速装置の前記所定の低速位置からの前進の高速側及び後進の高速側への操作が許容されるように、前記操作レバーと前記変速操作具とを、相手側の相対移動を許容する前記長孔を介して連係し、
前記操作ペダルを運転部において操作可能に、かつ、前記操作レバーを機体から降りてその機体の前方から操作可能に配置構成してある乗用型作業車。 - 走行用のブレーキを備えて、
前記主クラッチが遮断状態に操作され、前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に操作されると、前記走行用のブレーキが制動側に操作されるように構成してある請求項1に記載の乗用型作業車。 - 前記操作ペダルをボンネットの横側部のステップに備え、前記操作ペダルに前記操作レバーを備えて、前記ステップに機体前後方向の横軸芯周りで保持部材を左右揺動自在に支持し、
前記主クラッチが遮断状態に操作され前記静油圧式無段変速装置及び変速操作具が中立停止位置の付近の所定の低速位置に操作される状態を、前記保持部材の左右揺動操作により保持及び保持解除自在に構成してある請求項1又は2に記載の乗用型作業車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003430604A JP4580167B2 (ja) | 2003-12-25 | 2003-12-25 | 乗用型作業車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003430604A JP4580167B2 (ja) | 2003-12-25 | 2003-12-25 | 乗用型作業車 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005186782A JP2005186782A (ja) | 2005-07-14 |
| JP2005186782A5 JP2005186782A5 (ja) | 2006-06-15 |
| JP4580167B2 true JP4580167B2 (ja) | 2010-11-10 |
Family
ID=34788923
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003430604A Expired - Fee Related JP4580167B2 (ja) | 2003-12-25 | 2003-12-25 | 乗用型作業車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4580167B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4935191B2 (ja) * | 2006-05-30 | 2012-05-23 | 井関農機株式会社 | 乗用型苗移植機 |
| JP4935950B2 (ja) * | 2011-08-01 | 2012-05-23 | 井関農機株式会社 | 乗用型苗移植機 |
| JP5806142B2 (ja) * | 2012-02-17 | 2015-11-10 | ヤンマー株式会社 | 作業機 |
| JP2020103212A (ja) * | 2018-12-28 | 2020-07-09 | 株式会社クボタ | 水田作業機 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02103830U (ja) * | 1989-02-06 | 1990-08-17 | ||
| JP2000172356A (ja) * | 1998-12-10 | 2000-06-23 | Yanmar Agricult Equip Co Ltd | 管理作業車 |
| JP2001148907A (ja) * | 1999-11-29 | 2001-06-05 | Kubota Corp | 水田作業機 |
| JP2002225594A (ja) * | 2001-02-01 | 2002-08-14 | Kubota Corp | 乗用型水田作業機 |
| JP2003276468A (ja) * | 2002-03-22 | 2003-09-30 | Iseki & Co Ltd | 走行車体 |
| JP2003333906A (ja) * | 2002-05-20 | 2003-11-25 | Iseki & Co Ltd | 乗用型苗植機 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6015493B2 (ja) * | 1977-04-26 | 1985-04-19 | 三菱農機株式会社 | 移動農機における走行変速装置 |
| JPH0678048B2 (ja) * | 1987-10-19 | 1994-10-05 | 株式会社クボタ | 農作業車 |
| JP3152239B2 (ja) * | 1989-12-22 | 2001-04-03 | 井関農機株式会社 | 移動農機 |
| JP3327585B2 (ja) * | 1992-08-27 | 2002-09-24 | 株式会社クボタ | 乗用型水田走行作業機 |
-
2003
- 2003-12-25 JP JP2003430604A patent/JP4580167B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02103830U (ja) * | 1989-02-06 | 1990-08-17 | ||
| JP2000172356A (ja) * | 1998-12-10 | 2000-06-23 | Yanmar Agricult Equip Co Ltd | 管理作業車 |
| JP2001148907A (ja) * | 1999-11-29 | 2001-06-05 | Kubota Corp | 水田作業機 |
| JP2002225594A (ja) * | 2001-02-01 | 2002-08-14 | Kubota Corp | 乗用型水田作業機 |
| JP2003276468A (ja) * | 2002-03-22 | 2003-09-30 | Iseki & Co Ltd | 走行車体 |
| JP2003333906A (ja) * | 2002-05-20 | 2003-11-25 | Iseki & Co Ltd | 乗用型苗植機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005186782A (ja) | 2005-07-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4580167B2 (ja) | 乗用型作業車 | |
| JP2009178122A (ja) | 乗用型田植機 | |
| JP2005186782A5 (ja) | ||
| JP5192844B2 (ja) | 農作業機 | |
| JP2005185179A (ja) | 乗用型田植機 | |
| JP3722081B2 (ja) | 作業車両 | |
| JP4563014B2 (ja) | 農作業機 | |
| JP4315630B2 (ja) | 乗用田植機の走行速度保持機構 | |
| JP2003220933A (ja) | ブレーキ及びクラッチ操作機構 | |
| JP4141374B2 (ja) | 乗用型田植機 | |
| JP7630465B2 (ja) | 水田作業機 | |
| JP2003276468A (ja) | 走行車体 | |
| JP3503633B2 (ja) | 乗用作業機 | |
| JP3847129B2 (ja) | 作業車の操作構造 | |
| JP4454141B2 (ja) | 作業車 | |
| JP2010132037A (ja) | 作業車の走行操作装置 | |
| JP3627748B2 (ja) | 乗用型田植機 | |
| JP5907520B2 (ja) | 乗用型田植機における車外操作具の連係機構 | |
| JP4154824B2 (ja) | 苗植機 | |
| JP2024002178A (ja) | 水田作業機 | |
| JP2004248560A (ja) | 乗用型田植機の予備苗のせ台構造 | |
| JP2004329018A (ja) | 乗用型田植機 | |
| JP2003079205A (ja) | 乗用型作業機 | |
| JP2003267257A (ja) | 作業機 | |
| JP2006177391A (ja) | 操作装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060323 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060421 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080605 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080801 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090820 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091016 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100729 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100827 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130903 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130903 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140903 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |