JP4515133B2 - 搬送装置及びその制御方法並びに真空処理装置 - Google Patents
搬送装置及びその制御方法並びに真空処理装置 Download PDFInfo
- Publication number
- JP4515133B2 JP4515133B2 JP2004109683A JP2004109683A JP4515133B2 JP 4515133 B2 JP4515133 B2 JP 4515133B2 JP 2004109683 A JP2004109683 A JP 2004109683A JP 2004109683 A JP2004109683 A JP 2004109683A JP 4515133 B2 JP4515133 B2 JP 4515133B2
- Authority
- JP
- Japan
- Prior art keywords
- drive
- arm
- arms
- transport
- link mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title claims description 33
- 230000007246 mechanism Effects 0.000 claims description 116
- 230000033001 locomotion Effects 0.000 claims description 25
- 235000012431 wafers Nutrition 0.000 description 33
- 239000000758 substrate Substances 0.000 description 22
- 238000004519 manufacturing process Methods 0.000 description 20
- 230000008569 process Effects 0.000 description 19
- 239000004065 semiconductor Substances 0.000 description 14
- 239000000969 carrier Substances 0.000 description 10
- 230000009471 action Effects 0.000 description 6
- 230000008602 contraction Effects 0.000 description 6
- 238000009434 installation Methods 0.000 description 5
- 238000012423 maintenance Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 239000003638 chemical reducing agent Substances 0.000 description 4
- 230000005291 magnetic effect Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000011553 magnetic fluid Substances 0.000 description 1
- 238000004643 material aging Methods 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
Images













Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/106—Programme-controlled manipulators characterised by positioning means for manipulator elements with articulated links
- B25J9/1065—Programme-controlled manipulators characterised by positioning means for manipulator elements with articulated links with parallelograms
- B25J9/107—Programme-controlled manipulators characterised by positioning means for manipulator elements with articulated links with parallelograms of the froglegs type
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
Description
そして、各回転軸は、アーム回転用モータに設けられた減速機に対してベルトによって連結されている。
請求項2記載の発明は、請求項1記載の発明において、前記第2のリンク機構の第2の駆動アームは、前記第1のリンク機構の第1の駆動アーム及び第2の従動アームより長い水平腕部と、鉛直方向に延びる垂直腕部と、水平方向に延びる折り返し部を設けてコ字状に形成されているものである。
請求項3記載の発明は、請求項1又は2のいずれか1項記載の発明において、前記第1及び第2のリンク機構が、水平方向に動作する平行4節リンク機構から構成され、当該第1及び第2のリンク機構の一対のアームの開き角が180度となる死点位置を通過させる死点位置通過機構を備えているものである。
請求項4記載の発明は、請求項1乃至3のいずれか1項記載の発明において、前記第1〜第3の駆動軸を駆動する駆動手段を有し、当該駆動手段が、前記第1〜第3の駆動軸の回転をそれぞれ制御する駆動制御部を有するものである。
請求項5記載の発明は、請求項1乃至4のいずれか1項記載の発明において、前記第1及び第2のリンク機構を鉛直方向へ移動させる鉛直移動機構を備えているものである。
請求項6記載の発明は、請求項4又は5のいずれか1項記載の発明において、前記駆動手段が、前記第1〜第3の駆動軸の所定の部位にそれぞれ配設された永久磁石と、前記永久磁石と対応して設けられた電磁ステータとを有し、前記電磁ステータに対し所定の情報に基づいて駆動電流を供給するように構成されているものである。
請求項7記載の発明は、請求項4乃至6のいずれか1項記載の発明において、前記駆動手段が、前記第1〜第3の駆動軸の回転角度をそれぞれ検出する角度センサを有し、当該角度センサにおいて得られた結果に基づいて前記第1〜第3の駆動軸の回転を制御するように構成されているものである。
請求項8記載の発明は、請求項1乃至7のいずれか1項記載の搬送装置を制御する方法であって、前記第1及び第2のリンク機構の一対のアームを前記同心回転軸を中心として同方向へ等しい角度だけ回転させることにより、前記第1及び第2の搬送部を前記同心回転軸を中心として旋回させるステップを有するものである。
請求項9記載の発明は、請求項1乃至7のいずれか1項記載の搬送装置を制御する方法であって、前記第1のリンク機構又は第2のリンク機構のうち、一方のリンク機構の一対のアームを前記同心回転軸を中心として互いに逆方向へ等しい角度だけ回転させるとともに、他方のリンク機構の一対のアームを前記同心回転軸を中心として互いに同方向へ等しい角度だけ回転させることにより、前記第1の搬送部又は前記第2の搬送部のいずれか一方を前記同心回転軸を通る直線の方向へ移動させるステップを有するものである。
請求項10記載の発明は、請求項1乃至7のいずれか1項記載の搬送装置を制御する方法であって、前記第1及び第2の搬送部をそれぞれ旋回可能な領域に移動させる際に、前記第1及び第2のリンク機構の一対のアームをそれぞれ前記同心回転軸を中心として逆方向へ等しい角度だけ回転させることにより、前記第1及び第2の搬送部を前記旋回可能な領域に向かう方向へ移動させ、前記第1の搬送部又は第2の搬送部のいずれかが前記旋回可能な領域に到達した時点で、当該旋回可能な領域に到達した搬送部が含まれるリンク機構の一対のアームを前記同心回転軸を中心として同方向へ等しい角度だけ回転させることにより、この搬送部を前記同心回転軸を中心として旋回させるとともに、前記旋回可能な領域に到達していない搬送部が含まれるリンク機構の一対のアームをそれぞれ前記同心回転軸を中心として逆方向へ等しい角度だけ回転させることにより、この搬送部を前記旋回可能な領域に向かう方向へ引き続き移動させるステップを有するものである。
請求項11記載の発明は、請求項1乃至7のいずれか1項記載の搬送装置を有する搬送室と、前記搬送室に連通され、前記搬送装置を用いて処理対象物を受け渡しするように構成された真空処理室とを備えた真空処理装置である。
また、本発明の搬送装置は、旋回半径が小さいので、半導体ウェハや液晶表示パネル等を加工する半導体製造装置等をコンパクト化することができる。
また、本発明によれば、搬送装置の旋回速度を速くした場合に搬送対象物に加わる遠心力が大きくならず、支持部上で搬送対象物の位置がずれることがない。
さらに、本発明によれば、回転用モータの回転駆動力を正しく伝達させるとともに回転軸の回転角度を正確に検出することにより、搬送部における搬送対象物を正しい位置に搬送することができ、しかも、構成部品の数を削減するとともに、保守費用と製作費用を低減させることができる。
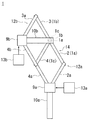
図1は、本発明の第1の実施の形態の搬送装置の基本構成を示す平面図、図2は、同搬送装置の基本構成を示す縦断面図である。
なお、第1〜第3駆動軸1a〜1cは、後述する鉛直移動機構11により鉛直方向に移動させることができるようになっている。
すなわち、本実施の形態の可動アームアセンブリ14では、直線状に延びる第1アーム2の先端部に従動アーム2aが水平面内において回転可能に連結されるとともに、直線状に延びる第3アーム4の先端部に従動アーム4aが水平面内において回転可能に連結され、さらにこれら従動アーム2aと従動アーム4aの先端部が、支軸8aに対し互いに同心状に回転可能に連結されている。
ここで、従動アーム3a、4bは、それぞれの基端部に設けられた回転軸7c、7dを例えば図示しない軸受けを用いて取り付けられる。
さらに、従動アーム3aと従動アーム4bの先端部の連結も、例えば図示しない軸受けが用いられる。
この支持台9bには、搬送物である例えばウェハを載せるための第2のキャリア10bが取り付けられている。
図4に示すように、第1、第2、第3駆動軸1a、1b、1cの下端部には、それぞれ、永久磁石32a、32b、32cと、各駆動軸1a〜1cの回転角度を検出するためのセンサーターゲット33a、33b、33cが取り付けられている。
これら永久磁石32a、32b、32cは、それぞれ単体又は複数個の磁性体から構成されている。
図3及び図4に示すように、本実施の形態では、上述した第1駆動軸1aに第1駆動プーリ21aが固定されるとともに、従動アーム4aの基端部に固定された中空の回転軸17の下端部に第1従動プーリ21bが中空の回転軸17と中心軸を一致させて固定されており、中空の回転軸17は回転軸7dの回りを回転できるように構成されている。さらに、これら第1駆動プーリ21aと第1従動プーリ21bとの間にベルト22aが掛け回されている。
なお、図5(a)(b)においては、説明の都合上、第1リンケージ12aと第2リンケージ12bとを別々に表している。
第1、第3駆動軸1a、1cを互いに逆方向に同じ角度だけ回転すると(図5(a)では、第1駆動軸1a(第1アーム2)をCW(時計回り)方向、第3駆動軸1c(第3アーム4)をCCW(反時計回り)方向)、第1アーム2と第3アーム4の開き角が180度となった時点で、第1リンケージ12aは死点位置状態となる。
なお、伸び位置にある第1リンケージ12aを、死点位置を通過させ縮み位置に戻すときは、上で説明した動作を全て逆方向に行う。
なお、伸び位置にある第2リンケージ12bを、死点位置を通過させ縮み位置に戻すときは、上で説明した動作を全て逆方向に行うことになる。
ここでは、第2のキャリア10b上に未処理ウェハAがあり、第1のキャリア10a上にはウェハがない状態を考える。
この状態では、第1のキャリア10aは、処理済みウェハBの下方側に位置しているので、鉛直移動機構11を動作させ、第1〜第3駆動軸1a〜1cを鉛直上方へ移動させて第1リンケージ12aを含む可動アームアセンブリ14全体を上方へ移動し、第1のキャリア10aによって処理済みウェハBを受け取る。
この状態では、第1及び第2のキャリア10a、10bは上下方向に正対している。また、両ウェハA、Bも上下方向に正対した状態で、第1〜第3駆動軸1a〜1cの同心回転軸近傍に位置している。
この状態で、鉛直移動機構11を動作させ、第1〜第3駆動軸1a〜1cを鉛直下方へ移動させて第2のキャリア10b上の未処理ウェハAを、図示しないプロセス装置へ受け渡す。
この状態では、第1及び第2のキャリア10a、10bは上下方向に正対し、またウェハBは、第1〜第3駆動軸1a〜1cの同心回転軸近傍の位置にある。
すなわち、第2アーム3の先端部に従動アーム4bがその基端部に設けた回転軸7dを中心として水平面内において回転可能に連結されるとともに、第3アーム4の先端部に従動アーム3aがその基端部に設けた回転軸7cを中心として水平面内において回転可能に連結され、さらにこれら従動アーム4bと従動アーム3aの先端部が、支持台9bの支軸8bに対し互いに同心状に回転可能に連結されている。
そして、これら駆動プーリ25、第1従動プーリ21b、ベルト22aにより、上記同様の第1の死点位置通過機構5aが構成されている。
第1、第2駆動軸1a、1bを互いに逆方向に同じ角度だけ回転すると(図13(a)では、第1駆動軸1a(第1アーム2)をCW方向、第2駆動軸1b(第2アーム3)をCCW方向)、第1アーム2と第2アーム3の開き角が180度となった時点で、第1リンケージ12aは死点位置状態となる。
なお、伸び位置にある第1リンケージ12aを、死点位置を通過させ縮み位置に戻すときは、上で説明した動作を全て逆方向に行う。
第2、第3駆動軸1b、1cを互いに逆方向に同じ角度だけ回転すると(図13(b)では、第3駆動軸1c(第3アーム4)をCW方向、第2駆動軸1b(第2アーム3)をCCW方向)、第2アーム3と第3アーム4の開き角が180度となった時点で、第2リンケージ12bは死点位置状態となる。
なお、伸び位置にある第2リンケージ12bを、死点位置を通過させ縮み位置に戻すときは、上で説明した動作を全て逆方向に行うことになる。
図14に示すように、本発明の真空処理装置の一例である半導体製造装置40においては、上述した搬送装置1が設けられる搬送チヤンバ41の周囲に、3つの並列加工処理が可能なプロセスチヤンバ42、43、44と、ウェハを搬入するための搬入チヤンバ45と、ウェハを搬出するための搬出チヤンバ46とが配設されている。
このとき、搬送装置1は、上述した動作を行うことにより、処理済みウェハ50bをプロセスチヤンバ42から受取り、それを別の例えばプロセスチヤンバ43へ搬送する。
例えば、上記実施の形態においては、第1及び第2のリンク機構として、平行4節リンク構造からなるものを用いたが、本発明はこれに限られず、他のリンク機構を採用することも可能である。
ただし、旋回半径の小径化及び部品点数の削減の観点からは、上記平行4節リンク構造からなるものを用いることが好ましい。
Claims (11)
- 所定の同心回転軸を中心としてそれぞれ水平面内で回転可能に設けられた第1の駆動軸、第2の駆動軸及び第3の駆動軸と、
前記第1〜第3の駆動軸にそれぞれ固定され、同一の軸間距離を有する第1の駆動アーム、第2の駆動アーム及び第3の駆動アームと、
前記第1〜第3の駆動アームのうち、前記第1及び第3の駆動アームと、当該第1及び第3の駆動アームの先端部にそれぞれ回転可能に連結された第1及び第2の従動アームとからなる第1のリンク機構と、
前記第1〜第3の駆動アームのうち、前記第2及び第3の駆動アームと、当該第2及び第3の駆動アームの先端部にそれぞれ回転可能に連結された第3及び第4の従動アームとからなる第2のリンク機構とを備え、
前記第1のリンク機構は、前記第1及び第2の従動アームの先端部が、前記第1〜第3の駆動軸の上方において、搬送対象物を搬送するための第1の搬送部を伴って、互いに水平面内で同心状に回転可能に連結されるとともに、
前記第2のリンク機構は、前記第2の駆動アームが、前記第1のリンク機構及び前記第1の搬送部と接触せず、かつ、その先端部が、前記第1のリンク機構及び前記第1の搬送部の上方に位置する形状に形成されるとともに、前記第3及び第4の従動アームの先端部が、前記第1のリンク機構及び前記第1の搬送部の上方において、第2の搬送ユニットを伴って、互いに同心状に水平面内で回転可能に連結されている搬送装置。 - 前記第2のリンク機構の第2の駆動アームは、前記第1のリンク機構の第1の駆動アーム及び第2の従動アームより長い水平腕部と、鉛直方向に延びる垂直腕部と、水平方向に延びる折り返し部を設けてコ字状に形成されている請求項1記載の搬送装置。
- 前記第1及び第2のリンク機構が、水平方向に動作する平行4節リンク機構から構成され、当該第1及び第2のリンク機構の一対のアームの開き角が180度となる死点位置を通過させる死点位置通過機構を備えている請求項1又は2のいずれか1項記載の搬送装置。
- 前記第1〜第3の駆動軸を駆動する駆動手段を有し、当該駆動手段が、前記第1〜第3の駆動軸の回転をそれぞれ制御する駆動制御部を有する請求項1乃至3のいずれか1項記載の搬送装置。
- 前記第1及び第2のリンク機構を鉛直方向へ移動させる鉛直移動機構を備えている請求項1乃至4のいずれか1項記載の搬送装置。
- 前記駆動手段が、前記第1〜第3の駆動軸の所定の部位にそれぞれ配設された永久磁石と、前記永久磁石と対応して設けられた電磁ステータとを有し、前記電磁ステータに対し所定の情報に基づいて駆動電流を供給するように構成されている請求項4又は5のいずれか1項記載の搬送装置。
- 前記駆動手段が、前記第1〜第3の駆動軸の回転角度をそれぞれ検出する角度センサを有し、当該角度センサにおいて得られた結果に基づいて前記第1〜第3の駆動軸の回転を制御するように構成されている請求項4乃至6のいずれか1項記載の搬送装置。
- 請求項1乃至7のいずれか1項記載の搬送装置を制御する方法であって、
前記第1及び第2のリンク機構の一対のアームを前記同心回転軸を中心として同方向へ等しい角度だけ回転させることにより、前記第1及び第2の搬送部を前記同心回転軸を中心として旋回させるステップを有する搬送装置の制御方法。 - 請求項1乃至7のいずれか1項記載の搬送装置を制御する方法であって、
前記第1のリンク機構又は第2のリンク機構のうち、一方のリンク機構の一対のアームを前記同心回転軸を中心として互いに逆方向へ等しい角度だけ回転させるとともに、他方のリンク機構の一対のアームを前記同心回転軸を中心として互いに同方向へ等しい角度だけ回転させることにより、前記第1の搬送部又は前記第2の搬送部のいずれか一方を前記同心回転軸を通る直線の方向へ移動させるステップを有する搬送装置の制御方法。 - 請求項1乃至7のいずれか1項記載の搬送装置を制御する方法であって、
前記第1及び第2の搬送部をそれぞれ旋回可能な領域に移動させる際に、
前記第1及び第2のリンク機構の一対のアームをそれぞれ前記同心回転軸を中心として逆方向へ等しい角度だけ回転させることにより、前記第1及び第2の搬送部を前記旋回可能な領域に向かう方向へ移動させ、
前記第1の搬送部又は第2の搬送部のいずれかが前記旋回可能な領域に到達した時点で、当該旋回可能な領域に到達した搬送部が含まれるリンク機構の一対のアームを前記同心回転軸を中心として同方向へ等しい角度だけ回転させることにより、この搬送部を前記同心回転軸を中心として旋回させるとともに、
前記旋回可能な領域に到達していない搬送部が含まれるリンク機構の一対のアームをそれぞれ前記同心回転軸を中心として逆方向へ等しい角度だけ回転させることにより、この搬送部を前記旋回可能な領域に向かう方向へ引き続き移動させるステップを有する搬送装置の制御方法。 - 請求項1乃至7のいずれか1項記載の搬送装置を有する搬送室と、
前記搬送室に連通され、前記搬送装置を用いて処理対象物を受け渡しするように構成された真空処理室とを備えた真空処理装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004109683A JP4515133B2 (ja) | 2004-04-02 | 2004-04-02 | 搬送装置及びその制御方法並びに真空処理装置 |
| KR1020050026885A KR101143287B1 (ko) | 2004-04-02 | 2005-03-31 | 반송장치 및 그 제어방법 그리고 진공처리장치 |
| TW094110563A TW200536689A (en) | 2004-04-02 | 2005-04-01 | Carrying device, method of controlling the same, and vacuum processing device |
| US11/095,649 US7572093B2 (en) | 2004-04-02 | 2005-04-01 | Transport apparatus, control method for the same, and vacuum processing system |
| CNB200510062636XA CN100463783C (zh) | 2004-04-02 | 2005-04-01 | 移送装置及其控制方法以及真空处理装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004109683A JP4515133B2 (ja) | 2004-04-02 | 2004-04-02 | 搬送装置及びその制御方法並びに真空処理装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005294662A JP2005294662A (ja) | 2005-10-20 |
| JP2005294662A5 JP2005294662A5 (ja) | 2007-04-05 |
| JP4515133B2 true JP4515133B2 (ja) | 2010-07-28 |
Family
ID=35049108
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004109683A Expired - Lifetime JP4515133B2 (ja) | 2004-04-02 | 2004-04-02 | 搬送装置及びその制御方法並びに真空処理装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7572093B2 (ja) |
| JP (1) | JP4515133B2 (ja) |
| KR (1) | KR101143287B1 (ja) |
| CN (1) | CN100463783C (ja) |
| TW (1) | TW200536689A (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9117859B2 (en) * | 2006-08-31 | 2015-08-25 | Brooks Automation, Inc. | Compact processing apparatus |
| US8752449B2 (en) * | 2007-05-08 | 2014-06-17 | Brooks Automation, Inc. | Substrate transport apparatus with multiple movable arms utilizing a mechanical switch mechanism |
| JPWO2008140093A1 (ja) * | 2007-05-15 | 2010-08-05 | 株式会社アルバック | 搬送装置及びこれを用いた真空処理装置 |
| CN101678974A (zh) * | 2007-05-31 | 2010-03-24 | 应用材料股份有限公司 | 延伸scara机械手臂连接的方法及设备 |
| JP4838357B2 (ja) * | 2008-01-31 | 2011-12-14 | キヤノンアネルバ株式会社 | 真空搬送装置 |
| JP5150608B2 (ja) * | 2009-11-20 | 2013-02-20 | 株式会社アルバック | 搬送装置及び真空装置 |
| JP5395271B2 (ja) | 2010-08-17 | 2014-01-22 | キヤノンアネルバ株式会社 | 基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法 |
| ITBO20120015A1 (it) * | 2012-01-16 | 2013-07-17 | Marchesini Group Spa | Apparato per introdurre articoli all'interno di astucci |
| JP6349947B2 (ja) * | 2013-11-19 | 2018-07-04 | 株式会社ジェイテクト | 搬送装置 |
| CN103904008B (zh) * | 2014-03-20 | 2016-08-17 | 上海华力微电子有限公司 | 一种半导体设备的机械臂的动态传感器结构 |
| CN106298583B (zh) * | 2015-05-27 | 2019-12-03 | 中微半导体设备(上海)股份有限公司 | 处理腔、处理腔和真空锁组合以及基片处理系统 |
| CN105598971A (zh) * | 2016-02-03 | 2016-05-25 | 先驱智能机械(深圳)有限公司 | 机械手臂的控制系统 |
| CN105500385A (zh) * | 2016-02-03 | 2016-04-20 | 先驱智能机械(深圳)有限公司 | 机械手臂的控制方法 |
| CN110678576B (zh) * | 2017-06-14 | 2022-03-22 | 株式会社爱发科 | 真空处理装置 |
| CN211208421U (zh) * | 2020-03-05 | 2020-08-07 | 福建北电新材料科技有限公司 | 一种可拆卸蚀刻多片碳化硅蚀刻工装治具 |
| CN112234008B (zh) * | 2020-09-03 | 2023-05-30 | 北京晶亦精微科技股份有限公司 | 用于晶圆的夹取及传输机构、cmp抛光设备 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0615592A (ja) * | 1992-04-23 | 1994-01-25 | Applied Materials Inc | ロボット・アセンブリ |
| JPH08506771A (ja) * | 1993-04-16 | 1996-07-23 | ブルックス オートメーション インコーポレイテッド | 搬送装置 |
| JPH10163296A (ja) * | 1996-11-27 | 1998-06-19 | Rootsue Kk | 基板搬送装置 |
| JPH11198070A (ja) * | 1998-01-12 | 1999-07-27 | Shin Meiwa Ind Co Ltd | 搬送装置 |
| JPH11514303A (ja) * | 1995-10-27 | 1999-12-07 | ブルックス オートメーション インコーポレイテッド | 2つの基板ホルダを備えた基板移送装置 |
| JP2000042952A (ja) * | 1998-07-27 | 2000-02-15 | Hitachi Ltd | 搬送装置及び搬送方法 |
| JP2000208588A (ja) * | 1998-11-13 | 2000-07-28 | Teijin Seiki Co Ltd | ロボットア―ム及びその駆動装置 |
| JP2001118905A (ja) * | 1999-10-20 | 2001-04-27 | Hitachi Ltd | 搬送方法及び搬送装置 |
| JP3204115B2 (ja) * | 1996-01-25 | 2001-09-04 | ダイキン工業株式会社 | ワーク搬送ロボット |
| JP2002059386A (ja) * | 1999-12-02 | 2002-02-26 | Komatsu Ltd | 搬送用ロボット |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3204115A (en) | 1961-07-31 | 1965-08-31 | Rca Corp | Four-terminal solid state superconductive device with control current flowing transverse to controlled output current |
| US6299404B1 (en) * | 1995-10-27 | 2001-10-09 | Brooks Automation Inc. | Substrate transport apparatus with double substrate holders |
| US5954840A (en) * | 1996-06-13 | 1999-09-21 | Genmark Automation | Universally tiltable Z axis drive arm |
| US5789878A (en) * | 1996-07-15 | 1998-08-04 | Applied Materials, Inc. | Dual plane robot |
| HUP0102431A3 (en) * | 1998-04-29 | 2001-12-28 | Fci S Hertogenbosch B V | Device comprising two parallel linkage mechanisms |
| US6464448B1 (en) * | 1998-09-01 | 2002-10-15 | Brooks Automation, Inc. | Substrate transport apparatus |
| US20010033788A1 (en) * | 1998-09-03 | 2001-10-25 | Pietrantonio Antonio F. | Dual multitran robot arm |
| JP4489999B2 (ja) | 2000-10-24 | 2010-06-23 | 株式会社アルバック | 搬送装置及び真空処理装置 |
| US6840732B2 (en) | 2000-10-24 | 2005-01-11 | Ulvac, Inc. | Transport apparatus and vacuum processing system using the same |
| CN2461719Y (zh) * | 2000-12-19 | 2001-11-28 | 沈宗麟 | 多连杆式机械手 |
| JP4173309B2 (ja) * | 2002-01-28 | 2008-10-29 | 東京エレクトロン株式会社 | センタリング装置及び枚葉式検査装置 |
-
2004
- 2004-04-02 JP JP2004109683A patent/JP4515133B2/ja not_active Expired - Lifetime
-
2005
- 2005-03-31 KR KR1020050026885A patent/KR101143287B1/ko active IP Right Grant
- 2005-04-01 TW TW094110563A patent/TW200536689A/zh unknown
- 2005-04-01 CN CNB200510062636XA patent/CN100463783C/zh not_active Expired - Fee Related
- 2005-04-01 US US11/095,649 patent/US7572093B2/en not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0615592A (ja) * | 1992-04-23 | 1994-01-25 | Applied Materials Inc | ロボット・アセンブリ |
| JPH08506771A (ja) * | 1993-04-16 | 1996-07-23 | ブルックス オートメーション インコーポレイテッド | 搬送装置 |
| JPH11514303A (ja) * | 1995-10-27 | 1999-12-07 | ブルックス オートメーション インコーポレイテッド | 2つの基板ホルダを備えた基板移送装置 |
| JP3204115B2 (ja) * | 1996-01-25 | 2001-09-04 | ダイキン工業株式会社 | ワーク搬送ロボット |
| JPH10163296A (ja) * | 1996-11-27 | 1998-06-19 | Rootsue Kk | 基板搬送装置 |
| JPH11198070A (ja) * | 1998-01-12 | 1999-07-27 | Shin Meiwa Ind Co Ltd | 搬送装置 |
| JP2000042952A (ja) * | 1998-07-27 | 2000-02-15 | Hitachi Ltd | 搬送装置及び搬送方法 |
| JP2000208588A (ja) * | 1998-11-13 | 2000-07-28 | Teijin Seiki Co Ltd | ロボットア―ム及びその駆動装置 |
| JP2001118905A (ja) * | 1999-10-20 | 2001-04-27 | Hitachi Ltd | 搬送方法及び搬送装置 |
| JP2002059386A (ja) * | 1999-12-02 | 2002-02-26 | Komatsu Ltd | 搬送用ロボット |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20060045058A (ko) | 2006-05-16 |
| US20050232744A1 (en) | 2005-10-20 |
| CN1676285A (zh) | 2005-10-05 |
| CN100463783C (zh) | 2009-02-25 |
| TWI339611B (ja) | 2011-04-01 |
| JP2005294662A (ja) | 2005-10-20 |
| US7572093B2 (en) | 2009-08-11 |
| KR101143287B1 (ko) | 2012-05-08 |
| TW200536689A (en) | 2005-11-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4732716B2 (ja) | 搬送装置及びその制御方法並びに真空処理装置 | |
| KR101143287B1 (ko) | 반송장치 및 그 제어방법 그리고 진공처리장치 | |
| US10850390B2 (en) | Dual robot including spaced upper arms and interleaved wrists and systems and methods including same | |
| US20210151344A1 (en) | Robot Having Arm with Unequal Link Lengths | |
| JP6051021B2 (ja) | 産業用ロボットおよび産業用ロボットの制御方法 | |
| US6669434B2 (en) | Double arm substrate transport unit | |
| US7383751B2 (en) | Articulated robot | |
| JP5195745B2 (ja) | 基板搬送ロボット | |
| JP5627599B2 (ja) | 搬送アーム、及びこれを備える搬送ロボット | |
| US20120141235A1 (en) | Dual arm robot | |
| JP2008135630A (ja) | 基板搬送装置 | |
| KR20010043252A (ko) | 공축 구동축을 구비한 듀얼 아암 장치 | |
| JPH1133950A (ja) | 2アーム方式の搬送用ロボット装置 | |
| TWI581929B (zh) | Substrate transfer robot and its operation method | |
| JP2012115985A (ja) | 搬送装置及びこれを用いた真空処理装置 | |
| JP7407163B2 (ja) | 搬送システム、搬送方法および搬送装置 | |
| JP4276534B2 (ja) | 搬送ロボット | |
| CN114126807A (zh) | 非对称双末端执行器机器人臂 | |
| JPH0687507A (ja) | 基板搬送装置 | |
| KR20230048603A (ko) | 산업용 로봇 및 제조 시스템 | |
| KR20230048598A (ko) | 산업용 로봇 | |
| JPH1133948A (ja) | 搬送ロボット及びその使用方法 | |
| JP2002222845A (ja) | 基板搬送用ロボット | |
| JPH09254058A (ja) | 物品搬送装置 | |
| JP2021013961A (ja) | 産業用ロボットおよび産業用ロボットの制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20070219 Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070219 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070219 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090824 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100209 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100412 Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20100412 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100511 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100512 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4515133 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130521 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130521 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160521 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |