JP4492351B2 - デュアル噴射型内燃機関 - Google Patents
デュアル噴射型内燃機関 Download PDFInfo
- Publication number
- JP4492351B2 JP4492351B2 JP2005000187A JP2005000187A JP4492351B2 JP 4492351 B2 JP4492351 B2 JP 4492351B2 JP 2005000187 A JP2005000187 A JP 2005000187A JP 2005000187 A JP2005000187 A JP 2005000187A JP 4492351 B2 JP4492351 B2 JP 4492351B2
- Authority
- JP
- Japan
- Prior art keywords
- injection
- cylinder
- learning
- fuel
- period
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D35/00—Controlling engines, dependent on conditions exterior or interior to engines, not otherwise provided for
- F02D35/02—Controlling engines, dependent on conditions exterior or interior to engines, not otherwise provided for on interior conditions
- F02D35/027—Controlling engines, dependent on conditions exterior or interior to engines, not otherwise provided for on interior conditions using knock sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/30—Controlling fuel injection
- F02D41/3094—Controlling fuel injection the fuel injection being effected by at least two different injectors, e.g. one in the intake manifold and one in the cylinder
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/30—Controlling fuel injection
- F02D41/38—Controlling fuel injection of the high pressure type
- F02D41/40—Controlling fuel injection of the high pressure type with means for controlling injection timing or duration
- F02D41/401—Controlling injection timing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L23/00—Devices or apparatus for measuring or indicating or recording rapid changes, such as oscillations, in the pressure of steam, gas, or liquid; Indicators for determining work or energy of steam, internal-combustion, or other fluid-pressure engines from the condition of the working fluid
- G01L23/22—Devices or apparatus for measuring or indicating or recording rapid changes, such as oscillations, in the pressure of steam, gas, or liquid; Indicators for determining work or energy of steam, internal-combustion, or other fluid-pressure engines from the condition of the working fluid for detecting or indicating knocks in internal-combustion engines; Units comprising pressure-sensitive members combined with ignitors for firing internal-combustion engines
- G01L23/221—Devices or apparatus for measuring or indicating or recording rapid changes, such as oscillations, in the pressure of steam, gas, or liquid; Indicators for determining work or energy of steam, internal-combustion, or other fluid-pressure engines from the condition of the working fluid for detecting or indicating knocks in internal-combustion engines; Units comprising pressure-sensitive members combined with ignitors for firing internal-combustion engines for detecting or indicating knocks in internal combustion engines
- G01L23/225—Devices or apparatus for measuring or indicating or recording rapid changes, such as oscillations, in the pressure of steam, gas, or liquid; Indicators for determining work or energy of steam, internal-combustion, or other fluid-pressure engines from the condition of the working fluid for detecting or indicating knocks in internal-combustion engines; Units comprising pressure-sensitive members combined with ignitors for firing internal-combustion engines for detecting or indicating knocks in internal combustion engines circuit arrangements therefor
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
Description
(1)基本構成
まず、本発明に係るデュアル噴射型内燃機関の概略構成が示されている図1を参照するに、エンジン1は複数(本実施形態では4つ)の気筒1aを備え、各気筒1aはそれぞれ対応する吸気枝管2を介して共通のサージタンク3に接続されている。サージタンク3は吸気ダクト4を介してエアクリーナ5に接続され、吸気ダクト4内にはエアフローメータ4aが配置されると共に、電動モータ6によって駆動されるスロットル弁7が配置されている。このスロットル弁7はアクセルペダル10とは独立して電子制御ユニット30の出力信号に基づいてその開度が制御される。一方、各気筒1aは共通の排気マニホルド8に連結され、この排気マニホルド8は三元触媒コンバータ9に連結されている。
次に、電子制御ユニット30によって実行される基本の燃料噴射制御について説明する。電子制御ユニット30のROM32には、図2に示されるような、エンジン1の回転数及び負荷と基本燃料噴射量との関係を予め定めた三次元マップが記憶される。このマップ内の全領域、すなわちエンジンの全運転領域は、第1領域R1、第2領域R2及び第3領域R3の3つの領域に区分される。
本実施形態に係るデュアル噴射型内燃機関では、ノックセンサ23の出力信号に基づき、ノック判定が行われ、その判定結果に応じて点火時期等を調整するノック制御が行われる。以下これについて説明する。
かかるノッキング抑制制御の第一の形態は、吸気通路噴射用インジェクタ12に対する筒内噴射用インジェクタ11の燃料噴射量割合を、エンジン運転状態により定まる基本噴射量割合より増大させることからなる。すなわち、筒内噴射用インジェクタ11による筒内噴射には、燃料の気化潜熱により筒内の吸入空気温度を低下させる作用、噴射燃料の貫徹力により筒内混合気の乱れを促進し、圧縮時の筒内の混合気温度を低下させる作用、及び燃焼速度を増大させる作用がある。これらの作用は、ノッキング発生の抑制に効果があるので、筒内噴射量割合を基本噴射量割合よりも増大する当該第一の形態はノッキング抑制に好適である。
さて、以上のノッキング抑制制御によりバックグラウンド学習中のノッキングは抑制されるが、かかるノッキング抑制制御を実行すると筒内噴射の燃料噴射量が基本値から変更され、これに伴って以下のような問題が生じることがある。
次に、本実施形態に係るバックグラウンド学習処理を図7〜図11に基づいて説明する。まず最初に図7のメイン処理について説明する。この処理は、電子制御ユニット30によって、エンジンの点火時期と同期して(すなわち180°クランク角毎に)実行される。
11 筒内噴射用インジェクタ
12 吸気通路噴射用インジェクタ
13 燃料分配管
15 高圧燃料ポンプ
15a スピル電磁弁
23 ノックセンサ
30 電子制御ユニット
40 燃料圧センサ
Vm 中央値
BGNLB B領域におけるバックグラウンドノイズレベル
MB B領域における加算値
THB B領域におけるノック判定閾値
K ノックセンサ出力信号
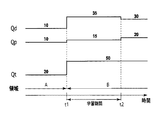
T 筒内噴射の噴射期間
S 筒内噴射の噴射開始時期
E 筒内噴射の噴射終了時期
Tg2,Tg4 ゲート期間
Claims (4)
- 筒内噴射用インジェクタと吸気通路噴射用インジェクタとを備えるデュアル噴射型内燃機関において、
ノックセンサと、
該ノックセンサの出力信号に基づきバックグラウンドノイズレベルを学習する学習手段と、
該バックグラウンドノイズレベルの学習開始後の学習期間中に、前記筒内噴射用インジェクタ又は前記吸気通路噴射用インジェクタにおける燃料噴射を制御することにより、ノッキング抑制制御を実行するノッキング抑制制御手段と、
前記学習期間以降において、前記バックグラウンドノイズレベルの学習結果に基づいて設定されたノック判定用閾値と、前記ノックセンサの出力信号とに基づいて実行されるノック判定の結果に応じて点火時期を調整するためのノック制御手段とを備えたことを特徴とする、デュアル噴射型内燃機関。 - 前記ノッキング抑制制御は、前記吸気通路噴射用インジェクタに対する前記筒内噴射用インジェクタの燃料噴射量割合をエンジン運転状態により定まる基本燃料噴射量割合より増大させることからなることを特徴とする、請求項1記載のデュアル噴射型内燃機関。
- 前記ノッキング抑制制御は、前記吸気通路噴射用インジェクタによる燃料噴射の噴射期間の少なくとも一部を吸気弁の開弁期間と重複させる同期噴射を実行することからなることを特徴とする、請求項1又は2記載のデュアル噴射型内燃機関。
- 前記ノッキング抑制制御は、前記筒内噴射用インジェクタにおける吸気行程噴射に対する圧縮行程噴射の燃料噴射量割合を、エンジン運転状態により定まる基本燃料噴射量割合より増大させることからなることを特徴とする、請求項1乃至3いずれかに記載のデュアル噴射型内燃機関。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005000187A JP4492351B2 (ja) | 2005-01-04 | 2005-01-04 | デュアル噴射型内燃機関 |
| EP09009238A EP2110534B1 (en) | 2005-01-04 | 2005-12-16 | Dual injection type internal combustion engine |
| PCT/JP2005/023556 WO2006073062A1 (en) | 2005-01-04 | 2005-12-16 | Dual injection type internal combustion engine |
| EP05819562A EP1834072B1 (en) | 2005-01-04 | 2005-12-16 | Dual injection type internal combustion engine |
| DE602005020506T DE602005020506D1 (de) | 2005-01-04 | 2005-12-16 | Verbrennungsmotor mit doppeleinspritzung |
| CN2005800459312A CN101151446B (zh) | 2005-01-04 | 2005-12-16 | 双喷射型内燃机 |
| US11/304,539 US7377255B2 (en) | 2005-01-04 | 2005-12-16 | Dual injection type internal combustion engine |
| US12/149,078 US7844389B2 (en) | 2005-01-04 | 2008-04-25 | Dual injection type internal combustion engine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005000187A JP4492351B2 (ja) | 2005-01-04 | 2005-01-04 | デュアル噴射型内燃機関 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009222960A Division JP4640526B2 (ja) | 2009-09-28 | 2009-09-28 | デュアル噴射型内燃機関 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006188973A JP2006188973A (ja) | 2006-07-20 |
| JP2006188973A5 JP2006188973A5 (ja) | 2008-01-31 |
| JP4492351B2 true JP4492351B2 (ja) | 2010-06-30 |
Family
ID=36013382
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005000187A Expired - Fee Related JP4492351B2 (ja) | 2005-01-04 | 2005-01-04 | デュアル噴射型内燃機関 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US7377255B2 (ja) |
| EP (2) | EP2110534B1 (ja) |
| JP (1) | JP4492351B2 (ja) |
| CN (1) | CN101151446B (ja) |
| DE (1) | DE602005020506D1 (ja) |
| WO (1) | WO2006073062A1 (ja) |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4353216B2 (ja) * | 2006-08-04 | 2009-10-28 | トヨタ自動車株式会社 | 筒内噴射式火花点火内燃機関 |
| JP5018026B2 (ja) * | 2006-11-09 | 2012-09-05 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| WO2008067406A2 (en) * | 2006-11-28 | 2008-06-05 | Transocean Sedco Forex Ventures Limited | Through-hull mooring system |
| JP2008202493A (ja) | 2007-02-20 | 2008-09-04 | Yamaha Motor Co Ltd | 燃料噴射制御装置、エンジンおよび鞍乗型車両 |
| DE102007019641A1 (de) * | 2007-04-26 | 2008-10-30 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Steuerung einer Brennkraftmaschine |
| JP4349451B2 (ja) * | 2007-08-23 | 2009-10-21 | 株式会社デンソー | 燃料噴射制御装置およびそれを用いた燃料噴射システム |
| US20090078027A1 (en) * | 2007-09-25 | 2009-03-26 | Lycoming Engines, A Division Of Avco Corporation | Aircraft engine cylinder assembly knock detection and suppression system |
| US7904231B2 (en) * | 2008-07-22 | 2011-03-08 | GM Global Technology Operations LLC | Method for controlling combustion noise in a compression-ignition engine |
| US8291888B2 (en) * | 2008-07-24 | 2012-10-23 | Honda Motor Co., Ltd. | Speed dependent knock control |
| US20100038236A1 (en) * | 2008-08-18 | 2010-02-18 | Alex Rivera | Hydrogen-from-water on-demand supplemental vehicle fuel electrolyzer system |
| FR2936017B1 (fr) * | 2008-09-18 | 2015-09-04 | Inst Francais Du Petrole | Procede de controle de la combustion d'un melange carbure pour un moteur a combustion interne a allumage commande, notamment pour un moteur suralimente |
| JP5333172B2 (ja) * | 2009-11-24 | 2013-11-06 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
| JP5508834B2 (ja) * | 2009-12-22 | 2014-06-04 | 日産自動車株式会社 | 内燃機関のノック判定装置 |
| DE102010061810A1 (de) | 2010-11-23 | 2012-05-24 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Kraftstoffsystems einer Brennkraftmaschine |
| WO2012131943A1 (ja) * | 2011-03-30 | 2012-10-04 | トヨタ自動車株式会社 | 内燃機関の燃料噴射制御装置 |
| WO2013061425A1 (ja) | 2011-10-26 | 2013-05-02 | トヨタ自動車 株式会社 | 内燃機関の燃料噴射制御装置 |
| WO2013061426A1 (ja) | 2011-10-26 | 2013-05-02 | トヨタ自動車 株式会社 | 内燃機関の燃料噴射制御装置 |
| DE102012207733B4 (de) | 2012-05-09 | 2024-05-02 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Erkennung eines Klopfens eines Verbrennungsmotors |
| JP6123175B2 (ja) * | 2012-06-29 | 2017-05-10 | マツダ株式会社 | 直噴エンジンの燃料噴射装置 |
| US9556784B2 (en) * | 2013-03-14 | 2017-01-31 | Ford Global Technologies, Llc | Method and system for vacuum control |
| US9255541B2 (en) | 2013-04-01 | 2016-02-09 | Ford Global Technologies, Llc | Method and system for engine control |
| US9297329B2 (en) * | 2013-04-01 | 2016-03-29 | Ford Global Technologies, Llc | Method and system for engine control |
| JP6098477B2 (ja) * | 2013-11-07 | 2017-03-22 | トヨタ自動車株式会社 | 火花点火式内燃機関の制御システム |
| JP6090594B2 (ja) * | 2014-06-24 | 2017-03-08 | トヨタ自動車株式会社 | 内燃機関の燃料噴射システム |
| CN106224107A (zh) * | 2016-08-23 | 2016-12-14 | 海博瑞德(北京)汽车技术有限公司 | 32位多点喷射发动机控制单元 |
| CN106930845B (zh) * | 2017-04-12 | 2019-08-27 | 潍柴西港新能源动力有限公司 | 一种燃气发动机爆震标定方法 |
| IT201700050454A1 (it) * | 2017-05-10 | 2018-11-10 | Magneti Marelli Spa | Metodo per il controllo di un dispositivo attuatore per un motore a combustione interna |
| JP6555323B2 (ja) * | 2017-11-10 | 2019-08-07 | マツダ株式会社 | 圧縮着火式エンジンの制御装置 |
| US10995683B2 (en) * | 2018-04-30 | 2021-05-04 | Woodward, Inc. | Acoustic knock detection in dual-fuel engines |
| US10746153B2 (en) | 2018-05-21 | 2020-08-18 | Ford Global Technologies, Llc | Method and system for adjusting engine knock background noise of a variable displacement engine |
| US10975828B2 (en) | 2018-05-21 | 2021-04-13 | Ford Global Technologies, Llc | Method and system for adjusting engine knock background noise levels |
| US11204011B2 (en) | 2018-05-21 | 2021-12-21 | Ford Global Technologies, Llc | Method and system for variable displacement engine knock control |
| US11255288B2 (en) * | 2018-05-23 | 2022-02-22 | Ford Global Technologies, Llc | Method and system for determining engine knock background noise levels |
| US10830163B2 (en) * | 2018-09-05 | 2020-11-10 | Ford Global Technologies, Llc | Method and system for learning contributions to an engine knock background noise level |
| US11073093B2 (en) * | 2018-11-19 | 2021-07-27 | Ford Global Technologies, Llc | Method and system for learning contributions of engine knock background noise for a variable displacement engine |
| DE102019000239A1 (de) | 2019-01-14 | 2020-07-16 | Daimler Ag | Verfahren zum Betreiben einer Verbrennungskraftmaschine, insbesondere eines Kraftfahrzeugs |
| CN111980817A (zh) * | 2019-05-21 | 2020-11-24 | 上海汽车集团股份有限公司 | 一种发动机控制方法及装置 |
| FR3102212B1 (fr) * | 2019-10-16 | 2022-03-18 | Psa Automobiles Sa | Moteur à combustion interne à essence à allumage par compression |
| JP2023133802A (ja) * | 2022-03-14 | 2023-09-27 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06272607A (ja) * | 1993-03-17 | 1994-09-27 | Matsushita Electric Ind Co Ltd | ノッキング検出装置 |
| JP2000145532A (ja) * | 1998-11-13 | 2000-05-26 | Daihatsu Motor Co Ltd | 内燃機関のノック判定用学習値の学習方法 |
| JP2002130027A (ja) * | 2001-09-17 | 2002-05-09 | Toyota Motor Corp | 可変バルブタイミング装置付き内燃機関の制御装置 |
| JP2004003429A (ja) * | 2002-03-28 | 2004-01-08 | Denso Corp | 内燃機関のノッキング抑制制御装置 |
| JP2004270583A (ja) * | 2003-03-10 | 2004-09-30 | Toyota Motor Corp | 内燃機関の燃料噴射装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02191819A (ja) | 1988-04-07 | 1990-07-27 | Mazda Motor Corp | ロータリピストンエンジンの燃料供給装置 |
| JPH0653728A (ja) | 1992-07-31 | 1994-02-25 | Sony Corp | 送信及び/又は受信アンテナ |
| JP3668497B2 (ja) * | 1992-09-30 | 2005-07-06 | 株式会社日立製作所 | 内燃機関のノッキング検出方法及び点火時期制御方法 |
| JP3317166B2 (ja) | 1996-11-26 | 2002-08-26 | トヨタ自動車株式会社 | 内燃機関のノッキング判定装置 |
| GB2343220A (en) * | 1998-10-26 | 2000-05-03 | Ford Motor Co | Internal combustion engine knock detection |
| JP2002227697A (ja) * | 2001-01-31 | 2002-08-14 | Mitsubishi Motors Corp | 内燃機関の燃料噴射装置 |
| JP2003013785A (ja) | 2001-06-28 | 2003-01-15 | Nissan Motor Co Ltd | 直噴火花点火式内燃機関の制御装置 |
| JP3893909B2 (ja) | 2001-06-28 | 2007-03-14 | 日産自動車株式会社 | 直噴火花点火式内燃機関の制御装置 |
| JP4211296B2 (ja) * | 2002-06-12 | 2009-01-21 | 日産自動車株式会社 | 内燃機関のノック制御装置 |
| JP3900088B2 (ja) * | 2003-02-20 | 2007-04-04 | トヨタ自動車株式会社 | 内燃機関のノック判定期間の設定方法、燃料噴射時期の設定方法、及び内燃機関の制御装置 |
| JP2004278461A (ja) | 2003-03-18 | 2004-10-07 | Toyota Motor Corp | 内燃機関のノッキング制御装置 |
| JP2004308618A (ja) | 2003-04-10 | 2004-11-04 | Toyota Motor Corp | 圧縮比変更機構を備えた内燃機関および内燃機関の制御方法 |
| JP4052230B2 (ja) | 2003-11-12 | 2008-02-27 | トヨタ自動車株式会社 | 内燃機関のノッキング判定装置 |
| JP4036198B2 (ja) | 2004-03-03 | 2008-01-23 | トヨタ自動車株式会社 | 内燃機関の燃料噴射制御装置 |
| JP2006037912A (ja) * | 2004-07-29 | 2006-02-09 | Toyota Motor Corp | 内燃機関のノッキング判定装置 |
-
2005
- 2005-01-04 JP JP2005000187A patent/JP4492351B2/ja not_active Expired - Fee Related
- 2005-12-16 DE DE602005020506T patent/DE602005020506D1/de active Active
- 2005-12-16 WO PCT/JP2005/023556 patent/WO2006073062A1/en active Application Filing
- 2005-12-16 US US11/304,539 patent/US7377255B2/en not_active Expired - Fee Related
- 2005-12-16 EP EP09009238A patent/EP2110534B1/en not_active Expired - Fee Related
- 2005-12-16 CN CN2005800459312A patent/CN101151446B/zh not_active Expired - Fee Related
- 2005-12-16 EP EP05819562A patent/EP1834072B1/en not_active Expired - Fee Related
-
2008
- 2008-04-25 US US12/149,078 patent/US7844389B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06272607A (ja) * | 1993-03-17 | 1994-09-27 | Matsushita Electric Ind Co Ltd | ノッキング検出装置 |
| JP2000145532A (ja) * | 1998-11-13 | 2000-05-26 | Daihatsu Motor Co Ltd | 内燃機関のノック判定用学習値の学習方法 |
| JP2002130027A (ja) * | 2001-09-17 | 2002-05-09 | Toyota Motor Corp | 可変バルブタイミング装置付き内燃機関の制御装置 |
| JP2004003429A (ja) * | 2002-03-28 | 2004-01-08 | Denso Corp | 内燃機関のノッキング抑制制御装置 |
| JP2004270583A (ja) * | 2003-03-10 | 2004-09-30 | Toyota Motor Corp | 内燃機関の燃料噴射装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101151446A (zh) | 2008-03-26 |
| WO2006073062A1 (en) | 2006-07-13 |
| EP2110534B1 (en) | 2011-08-31 |
| JP2006188973A (ja) | 2006-07-20 |
| US7844389B2 (en) | 2010-11-30 |
| EP1834072A1 (en) | 2007-09-19 |
| CN101151446B (zh) | 2010-09-08 |
| US7377255B2 (en) | 2008-05-27 |
| US20060144365A1 (en) | 2006-07-06 |
| US20080208439A1 (en) | 2008-08-28 |
| EP1834072B1 (en) | 2010-04-07 |
| DE602005020506D1 (de) | 2010-05-20 |
| EP2110534A1 (en) | 2009-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4492351B2 (ja) | デュアル噴射型内燃機関 | |
| US6978762B2 (en) | Control system for internal combustion engine | |
| US7207315B2 (en) | Device and method for controlling internal combustion engine | |
| JP2006258007A (ja) | 内燃機関の制御装置 | |
| KR20070086034A (ko) | 내연 기관용 제어 장치 | |
| JP2006057626A (ja) | 内燃機関の制御装置 | |
| JP4466337B2 (ja) | 内燃機関の制御装置 | |
| JP4277883B2 (ja) | 筒内噴射式火花点火内燃機関 | |
| JP2006194098A (ja) | 内燃機関の燃料噴射制御装置 | |
| JP5786880B2 (ja) | 内燃機関の制御装置 | |
| JP2006037912A (ja) | 内燃機関のノッキング判定装置 | |
| JP4513613B2 (ja) | 内燃機関の異常判定装置 | |
| JP4640526B2 (ja) | デュアル噴射型内燃機関 | |
| JP2007032326A (ja) | 内燃機関の制御装置 | |
| JP4506595B2 (ja) | 内燃機関の制御装置 | |
| JP4742633B2 (ja) | 内燃機関の制御装置 | |
| JP4581887B2 (ja) | 内燃機関の制御装置 | |
| JP6167637B2 (ja) | 内燃機関の制御装置 | |
| JP5282636B2 (ja) | 内燃機関の制御装置 | |
| JP4200963B2 (ja) | 内燃機関の制御装置 | |
| JP2006132400A (ja) | 内燃機関の燃料噴射制御方法 | |
| JP2006144629A (ja) | 内燃機関の制御装置 | |
| JP2013209935A (ja) | 内燃機関の燃料噴射制御装置 | |
| JP2006226151A (ja) | 内燃機関の燃料噴射制御装置 | |
| JP2005325717A (ja) | 内燃機関の燃料噴射制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20061003 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20061010 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071206 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090728 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090928 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20091117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100217 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20100224 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100316 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100329 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130416 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |