JP4340903B2 - 操舵制御装置 - Google Patents
操舵制御装置 Download PDFInfo
- Publication number
- JP4340903B2 JP4340903B2 JP2004566296A JP2004566296A JP4340903B2 JP 4340903 B2 JP4340903 B2 JP 4340903B2 JP 2004566296 A JP2004566296 A JP 2004566296A JP 2004566296 A JP2004566296 A JP 2004566296A JP 4340903 B2 JP4340903 B2 JP 4340903B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- control device
- rotation
- angle
- steering control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 54
- 230000008878 coupling Effects 0.000 claims abstract description 14
- 238000010168 coupling process Methods 0.000 claims abstract description 14
- 238000005859 coupling reaction Methods 0.000 claims abstract description 14
- 239000003638 chemical reducing agent Substances 0.000 claims description 19
- 238000001514 detection method Methods 0.000 claims description 11
- 238000006243 chemical reaction Methods 0.000 claims description 8
- 230000033001 locomotion Effects 0.000 abstract description 11
- 230000009467 reduction Effects 0.000 abstract description 8
- 230000001105 regulatory effect Effects 0.000 abstract description 5
- 230000000694 effects Effects 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical group [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000013021 overheating Methods 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000008844 regulatory mechanism Effects 0.000 description 1
- 229920003051 synthetic elastomer Polymers 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
- 239000005061 synthetic rubber Substances 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
- B62D5/005—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback
- B62D5/006—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback power actuated
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
- F16H2001/326—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear comprising a carrier with linear guiding means guiding at least one orbital gear
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Description
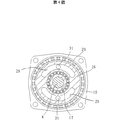
B オルダム継手
1 ステアリング軸
3 入力軸
4 出力軸
4a テーパ面
4b スプライン
6 減速機
11 角度・トルクセンサ
13 ハブ
15 ハウジング
18 偏芯ディスク
19 外歯歯車
21 内歯歯車
23 中継部材
26 回転ディスク
29 凹溝
30 舌片部
31 凸部
41 皿ばね
51 ハウジング
61 ポテンショメータ
71 弾性部材
Claims (13)
- ステアリングホイールに連結される操舵軸と、転舵輪を転舵させる転舵機構とを機械的に分離し、ステアリングホイールの操舵角を検出して、前記転舵機構によって操舵角に応じた転舵角で前記転舵輪を回動させるようにした操舵制御装置であって、
前記ステアリングホイールの回転に応じてハウジング内を公転する外歯歯車で構成されるハイポサイクロイド機構と、前記外歯歯車の自転運動を回転ディスクの自転運動として取り出すためのオルダム継手機構と、前記回転ディスクに形成された溝と前記ハウジングから突出する突起との係合による回転規制機構とを備えることを特徴とする操舵制御装置。 - 前記ハイポサイクロイド機構は、前記ステアリングホイールに連結する回転軸に装着された偏芯ディスクの外周に軸受を介して回転自在に設けられた前記外歯歯車と、前記ハウジング内に形成された内歯歯車とで構成され、該内歯歯車と前記外歯歯車との噛合によって構成される請求項1に記載の操舵制御装置。
- 前記オルダム継手機構は、前記外歯歯車と、前記回転ディスクとともに、該回転ディスクと前記外歯歯車との間に介挿された中継部材とから構成されるようにした請求項1又は2に記載の操舵制御装置。
- 前記回転規制機構には、前記回転ディスクに形成された溝と、前記ハウジングから突出する突起との間に弾性部材が配されるようにした請求項1乃至3の何れかに記載の操舵制御装置。
- 前記回転ディスクに、該回転ディスクの回転角を検出するためのポテンショメータを設けた請求項1乃至4の何れかに記載の操舵制御装置。
- 前記ステアリングホイールに連結する操舵軸には、モータの減速機が配され、かつ、
前記ハウジングから突出する突起は、前記減速機が収容されたハウジングから前記操舵軸に沿って前記回転ディスクの方向に延びる突起である請求項1乃至4の何れかに記載の操舵制御装置。 - 前記ステアリングホイールに連結する操舵軸に、モータの減速機が配されるとともに、
該減速機に隣接してトーションバーによって連結された2軸間の相対角度を検出する角度センサと、該角度センサからの検出結果に基づいてトルクを検出するトルクセンサとを備えた角度・トルクセンサが配されていて、該角度・トルクセンサと、前記モータと、前記減速機とによって反力付与機構を構成するようにした請求項1乃至4及び請求項6の何れかに記載の操舵制御装置。 - 前記操舵制御装置は、前記減速機の出力軸に着脱自在に配される請求項6又は7に記載の操舵制御装置。
- 前記減速機の出力軸端に、円錐テーパ面を形成するとともに、軸方向に沿ってスプラインを形成し、該スプラインおよび前記円錐テーパ面に沿って操舵制御装置を嵌挿させ、ネジによって固定するようにした請求項6乃至8の何れかに記載の操舵制御装置。
- 前記ステアリングホイールと前記減速機と間に配され、トーションバーによって連結された2軸の相対角度を検出する角度センサと、該角度センサからの検出結果に基づいてトルクを検出するトルクセンサとを備えた請求項6乃至9の何れかに記載の操舵制御装置。
- 前記回転ディスクに、該回転ディスクの回転角を検出するためのポテンショメータを設けた請求項6乃至10の何れかに記載の操舵制御装置。
- 前記ポテンショメータは、前記減速機と前記ハイポサイクロイド機構との間に配設されている請求項11に記載の操舵制御装置。
- 前記ポテンショメータによる検出結果に基づいて、前記回転規制機構がロック状態であると判定された場合、前記モータの通電を連続定格電流以下に制限するようにした請求項11又は12に記載の操舵制御装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003003829 | 2003-01-10 | ||
| JP2003003829 | 2003-01-10 | ||
| PCT/JP2003/016576 WO2004062983A1 (ja) | 2003-01-10 | 2003-12-24 | 操舵制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2004062983A1 JPWO2004062983A1 (ja) | 2006-05-18 |
| JP4340903B2 true JP4340903B2 (ja) | 2009-10-07 |
Family
ID=32708921
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004566296A Expired - Fee Related JP4340903B2 (ja) | 2003-01-10 | 2003-12-24 | 操舵制御装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7410028B2 (ja) |
| EP (1) | EP1584541B1 (ja) |
| JP (1) | JP4340903B2 (ja) |
| AT (1) | ATE385939T1 (ja) |
| AU (1) | AU2003292753A1 (ja) |
| DE (1) | DE60319145T2 (ja) |
| WO (1) | WO2004062983A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020184857A1 (ko) * | 2019-03-08 | 2020-09-17 | 주식회사 만도 | 스티어 바이 와이어식 조향장치 |
| KR20230012335A (ko) * | 2021-07-15 | 2023-01-26 | (주)동보 | 하이포사이클로이드 기어 구조 및 이를 포함한 감속기 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7775129B2 (en) * | 2006-04-10 | 2010-08-17 | Panasonic Corporation | Rotation angle sensor |
| EP2058210B1 (en) * | 2007-11-06 | 2012-08-29 | Honda Motor Co., Ltd. | Electric power steering device |
| JP5123738B2 (ja) * | 2008-05-22 | 2013-01-23 | 本田技研工業株式会社 | 電動パワーステアリング装置 |
| KR100986433B1 (ko) * | 2008-05-30 | 2010-10-08 | 현대자동차주식회사 | 전동식 파워스티어링 시스템 |
| ES2386398T3 (es) * | 2009-02-09 | 2012-08-20 | Thyssenkrupp Presta Aktiengesellschaft | Engranaje para dispositivo de dirección para vehículos |
| US8235324B1 (en) * | 2009-03-03 | 2012-08-07 | Orbital Research Inc. | Rotorcraft with electrically driven blade control |
| US9102355B2 (en) * | 2009-06-29 | 2015-08-11 | Volvo Lastvagnar Ab | Method and a system for assisting a driver of a vehicle during operation |
| JP5739713B2 (ja) * | 2010-06-25 | 2015-06-24 | 加茂精工株式会社 | ローラ式変速装置 |
| JP5615094B2 (ja) * | 2010-08-25 | 2014-10-29 | Ntn株式会社 | ステアバイワイヤ式操舵装置 |
| JP5871164B2 (ja) * | 2012-03-02 | 2016-03-01 | 株式会社ジェイテクト | 車両用操舵装置 |
| DE102014109289B4 (de) * | 2014-07-02 | 2020-01-30 | Pierburg Gmbh | Ventilvorrichtung zur Abgasrückführung in einem Verbrennungsmotor |
| WO2016172285A1 (en) * | 2015-04-24 | 2016-10-27 | Sri International | Drives with partial cycloid teeth profile |
| DE102015120207A1 (de) * | 2015-11-23 | 2017-05-24 | Robert Bosch Automotive Steering Gmbh | Lenkeinrichtung für ein kraftfahrzeug |
| US10471990B2 (en) * | 2017-06-20 | 2019-11-12 | GM Global Technology Operations LLC | Steering column feel emulator mechanical stops |
| US10427705B2 (en) * | 2017-06-30 | 2019-10-01 | GM Global Technology Operations LLC | Steering wheel with fixed eccentric center hub |
| GB201806096D0 (en) * | 2018-04-13 | 2018-05-30 | Trw Ltd | Torsion bar assembly and method of assembling same |
| CN108516013A (zh) * | 2018-06-12 | 2018-09-11 | 太原科技大学 | 一种轨道式四轮驱动电动汽车独立转向装置 |
| KR102098051B1 (ko) * | 2018-09-14 | 2020-04-07 | 주식회사 만도 | 전동식 동력 보조 조향장치의 감속기 |
| US11584426B2 (en) * | 2019-04-24 | 2023-02-21 | Steering Solutions Ip Holding Corporation | Rotational centering device for steering column |
| EP4196696A4 (en) * | 2020-09-07 | 2024-08-07 | Ali Mahmoodi | PERICYCLIC GEARBOX |
| CN112124217A (zh) * | 2020-10-27 | 2020-12-25 | 嘉兴市乐裕机电设备有限公司 | 一种带有显示屏的方向盘 |
| JP7485621B2 (ja) * | 2021-01-26 | 2024-05-16 | 日立Astemo株式会社 | 操舵装置 |
| IT202200007169A1 (it) * | 2022-04-11 | 2023-10-11 | Tkb S R L | Dispositivo riduttore irreversibile del numero di giri di un albero motore |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2826032B2 (ja) * | 1993-02-08 | 1998-11-18 | 本田技研工業株式会社 | 車両用舵角比可変装置 |
| DE19625503C1 (de) | 1996-06-26 | 1997-10-09 | Daimler Benz Ag | Lenkvorrichtung, insbesondere für ein Kraftfahrzeug |
| JPH10194152A (ja) * | 1997-01-16 | 1998-07-28 | Koyo Seiko Co Ltd | 自動車の舵取装置 |
| US6155377A (en) * | 1997-08-01 | 2000-12-05 | Honda Giken Kogyo Kabushiki Kaisha | Variable gear ratio steering system |
| JP2000016316A (ja) | 1998-06-30 | 2000-01-18 | Koyo Seiko Co Ltd | 車両用操舵装置 |
| JP3788106B2 (ja) | 1999-06-02 | 2006-06-21 | 三菱電機株式会社 | 電動式ステアリング装置 |
| JP2001114123A (ja) | 1999-10-20 | 2001-04-24 | Koyo Seiko Co Ltd | 車両用操舵装置 |
| JP2001130426A (ja) | 1999-11-09 | 2001-05-15 | Nsk Ltd | 車両用舵取装置 |
| JP3891747B2 (ja) * | 1999-12-07 | 2007-03-14 | 株式会社ジェイテクト | 電動式舵取装置 |
| JP2001171543A (ja) | 1999-12-20 | 2001-06-26 | Nissan Motor Co Ltd | 電動操舵装置 |
| JP3517833B2 (ja) * | 2000-04-05 | 2004-04-12 | 本田技研工業株式会社 | 可変舵角比操舵装置及び電動パワーステアリング装置を有する車両 |
| US6554095B2 (en) * | 2001-04-06 | 2003-04-29 | Visteon Global Technologies, Inc. | Torque-based steering system for steer by wire vehicles |
| JP2003276630A (ja) * | 2002-03-26 | 2003-10-02 | Koyo Seiko Co Ltd | 車両の操舵装置 |
-
2003
- 2003-12-24 AT AT03768164T patent/ATE385939T1/de not_active IP Right Cessation
- 2003-12-24 US US10/542,062 patent/US7410028B2/en active Active
- 2003-12-24 DE DE60319145T patent/DE60319145T2/de not_active Expired - Lifetime
- 2003-12-24 EP EP03768164A patent/EP1584541B1/en not_active Expired - Lifetime
- 2003-12-24 JP JP2004566296A patent/JP4340903B2/ja not_active Expired - Fee Related
- 2003-12-24 AU AU2003292753A patent/AU2003292753A1/en not_active Abandoned
- 2003-12-24 WO PCT/JP2003/016576 patent/WO2004062983A1/ja active IP Right Grant
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020184857A1 (ko) * | 2019-03-08 | 2020-09-17 | 주식회사 만도 | 스티어 바이 와이어식 조향장치 |
| KR20230012335A (ko) * | 2021-07-15 | 2023-01-26 | (주)동보 | 하이포사이클로이드 기어 구조 및 이를 포함한 감속기 |
| KR102532010B1 (ko) * | 2021-07-15 | 2023-05-15 | (주)동보 | 하이포사이클로이드 기어 구조 및 이를 포함한 감속기 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2004062983A1 (ja) | 2006-05-18 |
| US20060081409A1 (en) | 2006-04-20 |
| US7410028B2 (en) | 2008-08-12 |
| WO2004062983A1 (ja) | 2004-07-29 |
| DE60319145D1 (de) | 2008-03-27 |
| EP1584541B1 (en) | 2008-02-13 |
| AU2003292753A1 (en) | 2004-08-10 |
| EP1584541A1 (en) | 2005-10-12 |
| EP1584541A4 (en) | 2006-11-15 |
| ATE385939T1 (de) | 2008-03-15 |
| DE60319145T2 (de) | 2009-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4340903B2 (ja) | 操舵制御装置 | |
| JP3869803B2 (ja) | かじ取り装置 | |
| JP5100740B2 (ja) | 車両用ステアリング装置 | |
| US4890683A (en) | Power steering apparatus | |
| JP2972722B2 (ja) | 電気ステアリングシステム | |
| US11332182B2 (en) | Vehicle steering apparatus | |
| JP2008174213A (ja) | 舵角可変式ステアリング装置 | |
| CN103318253A (zh) | 车辆用转向操作装置 | |
| JP6199762B2 (ja) | パワーステアリング装置 | |
| JP6396201B2 (ja) | 電動パワーステアリング装置 | |
| JP2004034874A (ja) | 電動式パワーステアリング装置 | |
| JP4166242B2 (ja) | 電動パワーステアリング装置の減速装置及び電動パワーステアリング装置 | |
| KR101148664B1 (ko) | 유격 조절 감속기 및 이를 장착한 전동식 파워 스티어링장치 | |
| JP2002145083A (ja) | 動力舵取り装置および継手ユニット | |
| JP6277070B2 (ja) | 電動パワーステアリング装置 | |
| JP2005047340A (ja) | ステアリング装置 | |
| JP2017161009A (ja) | ギヤ装置およびステアリング装置 | |
| JP2000309279A (ja) | ラックピニオン式電動パワーステアリング装置 | |
| JP2005178461A (ja) | 車両用操舵装置 | |
| JP2008195108A (ja) | 電動パワーステアリング装置 | |
| JP5163885B2 (ja) | 伝達比可変操舵装置 | |
| JP2007050844A (ja) | 電動パワーステアリング装置 | |
| JP2001066201A (ja) | トルクセンサ及びこれを用いた電動式舵取装置 | |
| JP2005280589A (ja) | 電動パワーステアリング装置 | |
| JP2000159126A (ja) | 電動パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090310 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090511 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090610 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090623 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120717 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4340903 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120717 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130717 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |