JP4080435B2 - 障害物検知装置及び検知方法 - Google Patents
障害物検知装置及び検知方法 Download PDFInfo
- Publication number
- JP4080435B2 JP4080435B2 JP2004039132A JP2004039132A JP4080435B2 JP 4080435 B2 JP4080435 B2 JP 4080435B2 JP 2004039132 A JP2004039132 A JP 2004039132A JP 2004039132 A JP2004039132 A JP 2004039132A JP 4080435 B2 JP4080435 B2 JP 4080435B2
- Authority
- JP
- Japan
- Prior art keywords
- distance
- background information
- reflection
- reflection intensity
- range
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000001514 detection method Methods 0.000 title claims description 106
- 238000012545 processing Methods 0.000 claims description 31
- 238000004092 self-diagnosis Methods 0.000 claims description 15
- 238000000034 method Methods 0.000 claims description 9
- 230000008569 process Effects 0.000 claims description 7
- 230000001678 irradiating effect Effects 0.000 claims description 5
- 230000002159 abnormal effect Effects 0.000 claims description 4
- 230000005856 abnormality Effects 0.000 description 16
- 230000005540 biological transmission Effects 0.000 description 8
- 238000010586 diagram Methods 0.000 description 6
- 230000004888 barrier function Effects 0.000 description 4
- 238000005259 measurement Methods 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000002265 prevention Effects 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000010183 spectrum analysis Methods 0.000 description 1
Images







Landscapes
- Geophysics And Detection Of Objects (AREA)
- Train Traffic Observation, Control, And Security (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
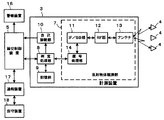
6;踏切遮断機、7;反射物体観測部、8;判定処理部、9;記憶部、
10;自己診断部、11;IF/BB部、12;RF部、13;アンテナ、
14;信号処理部、16;警報装置、17;通報装置、18;保守装置。
Claims (5)
- 計測装置と、検知対象領域の所定位置に反射基準点として配置された1又は複数の基準反射体とを有し、
前記計測装置は、反射物体観測手段と判定処理手段及び自己診断手段を有し、
前記反射物体観測手段は、検知対象領域に電磁波を照射して前記基準反射体と反射物体からの反射波を受信し、受信した反射波から前記基準反射体と反射物体までの距離と反射強度を観測し、
前記判定処理手段は、初期設定モードで、前記反射物体観測手段から検知対象領域に電磁波を照射し、前記基準反射物体までの距離と反射強度を観測し、観測した反射強度に対する所定の範囲と前記基準反射体までの距離の変動許容範囲を障害物判定の背景情報として記憶し、
検知実行モードでは、前記反射物体観測手段で観測した反射波の反射位置までの距離と反射強度のなかから検出対象領域内の全ての反射位置までの距離と反射強度と背景情報とを比較し、各反射位置までの距離と反射強度に背景情報と差が生じた反射位置までの距離が背景情報に含まれる前記基準反射体までの距離の変動許容範囲外であるかどうかを判定し、反射位置までの距離が前記基準反射体までの距離の変動許容範囲外のとき背景情報と差が生じた反射強度が背景情報に含まれる前記基準反射体の反射強度の範囲以上であるかを判定する処理を継続して行い、背景情報と差が生じた反射位置までの距離が前記基準反射体までの距離の変動許容範囲外で、背景情報と差が生じた反射強度が背景情報に含まれる前記基準反射体の反射強度の範囲以上になる検出回数を計数し、所定時間経過したときに検出回数が所定回数を超えている場合、検出対象領域に障害物が存在すると判定し、
前記自己診断手段は、前記判定処理手段で背景情報と差が生じた反射位置までの距離が背景情報に含まれる前記基準反射体までの距離の変動許容範囲内であり、かつ、背景情報と差が生じた反射強度が背景情報に含まれる前記基準反射体の反射強度の範囲外であるとき、反射強度の範囲外になる検出回数を計数し、所定時間経過したときに、検出回数が所定回数を超えているとき装置異常と判定することを特徴とする障害物検知装置。 - 前記反射物体観測手段は、ミリ波帯又はマイクロ波帯の電磁波を照射する請求項1記載の障害物検知装置。
- 前記検知対象領域は踏切道である請求項1又は2記載の障害物検知装置。
- 初期設定モードで、検知対象領域に電磁波を照射し、基準反射物体までの距離と反射強度を観測し、観測した反射強度に対する所定の範囲と前記基準反射体までの距離の変動許容範囲を障害物判定の背景情報として記憶し、
検知実行モードでは、検知対象領域に電磁波を照射して観測した反射波の反射位置までの距離と反射強度のなかから検出対象領域内の全ての反射位置までの距離と反射強度と背景情報とを比較し、各反射位置までの距離と反射強度に背景情報と差が生じた反射位置までの距離が背景情報に含まれる前記基準反射体までの距離の変動許容範囲外であるかどうかを判定し、反射位置までの距離が前記基準反射体までの距離の変動許容範囲外のとき背景情報と差が生じた反射強度が背景情報に含まれる前記基準反射体の反射強度の範囲以上であるかを判定する処理を継続して行い、背景情報と差が生じた反射位置までの距離が前記基準反射体までの距離の変動許容範囲外で、背景情報と差が生じた反射強度が背景情報に含まれる前記基準反射体の反射強度の範囲以上になる検出回数を計数し、所定時間経過したときに検出回数が所定回数を超えている場合、検出対象領域に障害物が存在すると判定し、
前記背景情報と差が生じた反射位置までの距離が背景情報に含まれる前記基準反射体までの距離の変動許容範囲内であり、かつ、背景情報と差が生じた反射強度が背景情報に含まれる前記基準反射体の反射強度の範囲外であるとき、反射強度の範囲外になる検出回数を計数し、所定時間経過したときに、検出回数が所定回数を超えているとき装置異常と判定することを特徴とする障害物検知方法。 - 前記検知領域に照射する電磁波は、ミリ波帯又はマイクロ波帯の電磁波である請求項4記載の障害物検知方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004039132A JP4080435B2 (ja) | 2004-02-17 | 2004-02-17 | 障害物検知装置及び検知方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004039132A JP4080435B2 (ja) | 2004-02-17 | 2004-02-17 | 障害物検知装置及び検知方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005233615A JP2005233615A (ja) | 2005-09-02 |
| JP2005233615A5 JP2005233615A5 (ja) | 2005-12-15 |
| JP4080435B2 true JP4080435B2 (ja) | 2008-04-23 |
Family
ID=35016754
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004039132A Expired - Lifetime JP4080435B2 (ja) | 2004-02-17 | 2004-02-17 | 障害物検知装置及び検知方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4080435B2 (ja) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4339146B2 (ja) * | 2004-02-18 | 2009-10-07 | 日本信号株式会社 | 踏切障害物検知装置 |
| JP2008179269A (ja) * | 2007-01-25 | 2008-08-07 | Mitsubishi Electric Corp | 踏切障害物検知装置 |
| JP5224723B2 (ja) * | 2007-05-18 | 2013-07-03 | 三菱電機特機システム株式会社 | マイクロ波検出システムおよびマイクロ波検出方法 |
| JP5134453B2 (ja) * | 2008-06-25 | 2013-01-30 | 日本信号株式会社 | 踏切障害物検知装置 |
| JP5302620B2 (ja) * | 2008-10-17 | 2013-10-02 | 日本信号株式会社 | 踏切障害物検知装置 |
| JP5498682B2 (ja) * | 2008-10-17 | 2014-05-21 | 日本信号株式会社 | 踏切障害物検知装置 |
| JP5436256B2 (ja) * | 2010-02-15 | 2014-03-05 | 株式会社レッツ・コーポレーション | 監視システム |
| JP5872151B2 (ja) * | 2010-11-09 | 2016-03-01 | 日本信号株式会社 | 踏切障害物検知装置 |
| JP5872152B2 (ja) * | 2010-11-09 | 2016-03-01 | 日本信号株式会社 | 踏切障害物検知装置 |
| US9297887B2 (en) | 2012-02-29 | 2016-03-29 | Panasonic Corporation | Device for detecting intruding objects, and method for detecting intruding objects |
| JP6102460B2 (ja) * | 2013-04-23 | 2017-03-29 | 富士通株式会社 | 検出システム、検出装置、検出プログラムおよび検出方法 |
| JP6772524B2 (ja) * | 2016-04-21 | 2020-10-21 | 住友電気工業株式会社 | 電波センサおよび検知方法 |
| JP6774139B2 (ja) * | 2016-08-24 | 2020-10-21 | 大同信号株式会社 | 踏切障害物検知装置 |
| JP6722128B2 (ja) * | 2017-03-01 | 2020-07-15 | 株式会社日立製作所 | 存在検知システムおよび存在検知装置 |
| DE102018207716A1 (de) * | 2018-05-17 | 2019-11-21 | Robert Bosch Gmbh | Radarsensorsystem und Verfahren zum Herstellen eines Radarsensorsystems |
| JP7349783B2 (ja) * | 2018-12-21 | 2023-09-25 | 大同信号株式会社 | 踏切障害物検知装置 |
| DE102019111679A1 (de) * | 2019-05-06 | 2020-11-12 | S.M.S Smart Microwave Sensors Gmbh | Verfahren zum Erfassung von Verkehrsteilnehmern |
| CN113552589A (zh) * | 2020-04-01 | 2021-10-26 | 杭州萤石软件有限公司 | 障碍检测方法、机器人和存储介质 |
| WO2023112635A1 (ja) * | 2021-12-17 | 2023-06-22 | 住友電気工業株式会社 | インフラ電波センサ |
| CN114739451A (zh) * | 2022-03-22 | 2022-07-12 | 国网山东省电力公司超高压公司 | 毫米波雷达监测下的输电导线安全预警方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4007707B2 (ja) * | 1998-12-18 | 2007-11-14 | 東日本旅客鉄道株式会社 | 鉄道用障害物検出装置 |
| JP2001325690A (ja) * | 2000-05-18 | 2001-11-22 | Nippon Signal Co Ltd:The | 障害物検知装置 |
| JP3651769B2 (ja) * | 2000-06-14 | 2005-05-25 | 株式会社東芝 | 航空機検知システム |
| JP3371900B2 (ja) * | 2000-12-01 | 2003-01-27 | オムロン株式会社 | 侵入物体検出方法および侵入物体検出システム |
| JP3443645B2 (ja) * | 2001-03-06 | 2003-09-08 | 国土交通省国土技術政策総合研究所長 | ミリ波センサのデータ確信度判定方式 |
| JP2003011824A (ja) * | 2001-06-29 | 2003-01-15 | East Japan Railway Co | 踏切障害物検知装置 |
-
2004
- 2004-02-17 JP JP2004039132A patent/JP4080435B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005233615A (ja) | 2005-09-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4080435B2 (ja) | 障害物検知装置及び検知方法 | |
| US5471214A (en) | Collision avoidance and warning system | |
| US8596587B2 (en) | Systems and methods for redundant vehicle detection at highway-rail grade crossings | |
| US6680689B1 (en) | Method for determining object classification from side-looking sensor data | |
| US9019115B2 (en) | Warning horn control system, radar system, and method | |
| JP2007126025A (ja) | 物体検出ユニット、物体検出装置、横断路の移動物体検知装置及びプログラム | |
| US20200118430A1 (en) | System, method and computer program product for radar based car accident prevention | |
| JP4731517B2 (ja) | 踏切障害物検知装置 | |
| JP3909370B2 (ja) | 防犯センサ | |
| JP4117581B2 (ja) | 踏切の障害物検知装置 | |
| JP4387827B2 (ja) | 踏切障害物検知装置 | |
| KR101238702B1 (ko) | 디텍터를 이용한 철도건널목 지장물 검지장치 및 동 장치를 이용한 검지방법 | |
| US20140118170A1 (en) | Vehicle detector | |
| WO2003029045A2 (en) | Multi-technology object detection system and method | |
| JP4169677B2 (ja) | 障害物検知装置 | |
| JP4339146B2 (ja) | 踏切障害物検知装置 | |
| JP3324537B2 (ja) | 車両監視装置 | |
| JP5057831B2 (ja) | 障害物検知装置 | |
| JP3854558B2 (ja) | 踏切障害物検知装置及び踏切障害物検知方法 | |
| JP2008179269A (ja) | 踏切障害物検知装置 | |
| JPH05274035A (ja) | 障害物検出装置 | |
| JP2012101620A (ja) | 踏切障害物検知装置 | |
| JP4738374B2 (ja) | 踏切障害物検知装置 | |
| JP3775191B2 (ja) | 歩行者存在報知装置及び車載用歩行者検出装置 | |
| RU2330774C2 (ru) | Устройство для предупреждения аварийных ситуаций на железнодорожных переездах |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051026 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20051026 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20070705 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070710 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070820 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080206 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110215 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4080435 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120215 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120215 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130215 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140215 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |