JP3932806B2 - 自動車の走行制御装置 - Google Patents
自動車の走行制御装置 Download PDFInfo
- Publication number
- JP3932806B2 JP3932806B2 JP2000523076A JP2000523076A JP3932806B2 JP 3932806 B2 JP3932806 B2 JP 3932806B2 JP 2000523076 A JP2000523076 A JP 2000523076A JP 2000523076 A JP2000523076 A JP 2000523076A JP 3932806 B2 JP3932806 B2 JP 3932806B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- speed
- preceding vehicle
- target
- yaw rate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005540 biological transmission Effects 0.000 claims description 13
- 230000001133 acceleration Effects 0.000 description 36
- 238000000034 method Methods 0.000 description 5
- 238000005259 measurement Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000000881 depressing effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0008—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator including means for detecting potential obstacles in vehicle path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
- B60K31/0066—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator responsive to vehicle path curvature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
- B60W30/045—Improving turning performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18145—Cornering
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D29/00—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto
- F02D29/02—Controlling engines, such controlling being peculiar to the devices driven thereby, the devices being other than parts or accessories essential to engine operation, e.g. controlling of engines by signals external thereto peculiar to engines driving vehicles; peculiar to engines driving variable pitch propellers
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/20—Road profile, i.e. the change in elevation or curvature of a plurality of continuous road segments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/30—Road curve radius
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/805—Azimuth angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
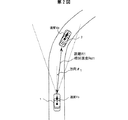
22,ブレーキコントローラ23のアクチュエータコントローラへ指令値を送り、減速させ、自車が地点P1を走行するときの速度をV1とする。同様に、先行車が加速している場合、図3(a)に示すように、先行車が地点P2を時刻t2に速度V2で走行している時に、自車は地点Q2を走行中である。時刻t2における自車速度と先行車速度V2との差から、目標車速・加速度演算部17で目標車速と目標加速度を演算する。これら目標車速と目標加速度に基づいて、車両制御部18は、スロットルコントローラ21,変速機コントローラ22に指令値を送り、自車が地点P2に到達した時点で、先行車が地点P2を通過した速度V2となるよう、加速する。
100で車速制御走行モードであると判断した後、ステップ120で自車速とヨーレイトを計測する。図4に示した例と同様に、ステップ110でレーダ装置10が先行車を捕捉中であるかを判定し、レーダ装置10が先行車を捕捉していない場合は、目標とする車速を維持する走行制御をステップ111で実行する。先行車をレーダが捕捉している場合、ステップ102で車間距離・相対速度・方向を計測する。次に、自車のヨーレイトがしきい値以上であるかをステップ121で判定する。ヨーレイトがしきい値以上、すなわち自車が旋回中であると判断された場合、自車速と相対速度から先行車車速をステップ104で求め、ステップ105において、自車がステップ102で計測した時点の先行車位置に到達したときに自車速度が検出した先行車速度以下となるよう、目標加速度と目標速度をステップ105で算出する。次にステップ122においては、ステップ105で求めた目標速度がヨーレイトから定まる上限速度以下であるかを判定し、上限速度以上である場合は、上限速度以下となるように目標車速と目標加速度をステップ123で再設定する。これら目標車速と目標加速度の値に基づいて、ステップ106では各アクチュエータコントローラへ目標値を実現するための指令値を出力する。
106で出力する。
11 車速センサ
12 ヨーレイトセンサ
13 スイッチ
20 主制御装置
16 記憶部
24 スロットル
26 変速機
27 ブレーキアクチュエータ
Claims (5)
- 先行車との車間距離と相対速度を検出する手段と、
自車の車速を検出する手段と、
前記自車速度と前記相対速度から前記先行車の速度を演算する手段と、
前記先行車が前記自車の正面方向からある角度偏向した地点を通過する前記先行車の速度を記憶し、前記自車がその地点を通過するときに、記憶した前記先行車の速度以下となるように、スロットル,トランスミッション,ブレーキの少なくとも1つを用いて自車速度を制御する手段と、を備えた自動車の走行制御装置。 - 請求項1に記載の自動車の走行制御装置であって、
前記制御手段は、前記先行車の方向が変化した場合に前記自車速度を制御する自動車の走行制御装置。 - 請求項1に記載の自動車の走行制御装置であって、
前記制御手段は、前記先行車との車間距離が所定の値以上に前記自車速度を制御する自動車の走行制御装置。 - 請求項1に記載の自動車の走行制御装置であって、
自車の車速とヨーレイトを検出する手段と、
前記自車のヨーレイトがある値以上の場合に、ある地点を通過する前記先行車の速度を記憶し、前記自車がその地点を通過するときに、前記自車のヨーレイトの大きさに基づいて決められる速度と記憶した前記先行車の速度以下となるようにスロットル,トランスミッション,ブレーキの少なくとも1つを用いて自車速度を制御する手段と、を備えた自動車の走行制御装置。 - 請求項1に記載の自動車の走行制御装置であって、
自車の車速とヨーレイトを検出する手段と、
前記先行車を見失い、かつ、前記自車のヨーレイトがある値以上の場合には、前記先行車を見失った時点の前記先行車の速度と前記自車のヨーレイトの大きさに基づいて決められる速度以下になるように、スロットル,トランスミッション,ブレーキの少なくとも1つを用いて自車速度を制御する手段と、を備えた自動車の走行制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP1997/004375 WO1999028144A1 (fr) | 1997-12-01 | 1997-12-01 | Regulateur de conduite pour automobile |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007010941A Division JP4277907B2 (ja) | 2007-01-22 | 2007-01-22 | 自動車の走行制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP3932806B2 true JP3932806B2 (ja) | 2007-06-20 |
Family
ID=14181560
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000523076A Expired - Fee Related JP3932806B2 (ja) | 1997-12-01 | 1997-12-01 | 自動車の走行制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US6363311B1 (ja) |
| EP (2) | EP1034963B1 (ja) |
| JP (1) | JP3932806B2 (ja) |
| DE (2) | DE69735957T2 (ja) |
| WO (1) | WO1999028144A1 (ja) |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6212465B1 (en) * | 1999-12-22 | 2001-04-03 | Visteon Global Technologies Inc. | Method and system for controlling vehicle speed based on vehicle yaw rate and yaw acceleration |
| DE10018557A1 (de) * | 2000-04-14 | 2001-10-18 | Bosch Gmbh Robert | Verfahren zur Regelung der Geschwindigkeit eines Fahrzeugs |
| DE10018556A1 (de) * | 2000-04-14 | 2001-10-18 | Bosch Gmbh Robert | Verfahren zur Regelung der Geschwindigkeit eines Fahrzeugs |
| DE10030258A1 (de) * | 2000-06-20 | 2002-01-03 | Daimler Chrysler Ag | Verfahren zur Abstandsregelung eines Fahrzeugs zu einem vorausfahrenden Fremdfahrzeug und Abstandsregelsystem |
| JP3646660B2 (ja) * | 2001-03-26 | 2005-05-11 | 日産自動車株式会社 | 車両用追従走行制御装置 |
| DE10118265A1 (de) * | 2001-04-12 | 2002-10-17 | Bosch Gmbh Robert | Verfahren zur Erkennung eines Spurwechsels eines Fahrzeugs |
| JP2003072416A (ja) * | 2001-08-31 | 2003-03-12 | Denso Corp | 車両用走行制御装置 |
| DE10159658A1 (de) * | 2001-12-05 | 2003-06-26 | Daimler Chrysler Ag | System zur automatischen Folgeführung eines Kraftfahrzeugs |
| US6679702B1 (en) * | 2001-12-18 | 2004-01-20 | Paul S. Rau | Vehicle-based headway distance training system |
| FR2834110B1 (fr) | 2001-12-20 | 2004-01-30 | Valeo Vision | Dispositif d'aide a la conduite pour vehicule automobile optimise par synergie avec un eclairage adaptatif |
| US7260465B2 (en) * | 2002-04-30 | 2007-08-21 | Ford Global Technology, Llc | Ramp identification in adaptive cruise control |
| US6753804B2 (en) | 2002-05-21 | 2004-06-22 | Visteon Global Technologies, Inc. | Target vehicle identification based on the theoretical relationship between the azimuth angle and relative velocity |
| DE10251037A1 (de) * | 2002-11-02 | 2004-05-19 | Robert Bosch Gmbh | Vorrichtung zur adaptiven Abstands- und Geschwindigkeitsregelung mit Rückbegrenzung |
| US7386385B2 (en) * | 2002-11-21 | 2008-06-10 | Lucas Automotive Gmbh | System for recognising the lane-change manoeuver of a motor vehicle |
| DE10254420A1 (de) * | 2002-11-21 | 2004-06-03 | Lucas Automotive Gmbh | System zur Beeinflussung der Geschwindigkeit eines Kraftfahrzeuges |
| DE10254394A1 (de) * | 2002-11-21 | 2004-06-03 | Lucas Automotive Gmbh | System zur Beeinflussung der Geschwindigkeit eines Kraftfahrzeuges |
| US7162361B2 (en) * | 2002-11-21 | 2007-01-09 | Lucas Automotive Gmbh | System for influencing the speed of a motor vehicle |
| DE10254402B4 (de) * | 2002-11-21 | 2011-02-17 | Lucas Automotive Gmbh | System zur Beeinflussung der Geschwindigkeit eines Kraftfahrzeuges |
| DE10254423A1 (de) * | 2002-11-21 | 2004-06-03 | Lucas Automotive Gmbh | System zur Beeinflussung der Geschwindigkeit eines Kraftfahrzeuges |
| US7831367B2 (en) * | 2002-11-21 | 2010-11-09 | Lucas Automotive Gmbh | System for influencing the speed of a motor vehicle |
| DE10254403A1 (de) * | 2002-11-21 | 2004-06-03 | Lucas Automotive Gmbh | System zur Beeinflussung der Geschwindigkeit eines Kraftfahrzeuges |
| DE10254424A1 (de) * | 2002-11-21 | 2004-06-03 | Lucas Automotive Gmbh | System zur Beeinflussung der Geschwindigkeit eines Kraftfahrzeuges |
| DE10254421A1 (de) * | 2002-11-21 | 2004-06-03 | Lucas Automotive Gmbh | System zur Beeinflussung der Geschwindigkeit eines Kraftfahrzeuges |
| US7831368B2 (en) * | 2002-11-21 | 2010-11-09 | Lucas Automotive Gmbh | System for influencing the speed of a motor vehicle |
| US6691018B1 (en) * | 2002-11-21 | 2004-02-10 | Visteon Global Technologies, Inc. | Method and system for identifying a lane change |
| KR100513523B1 (ko) * | 2003-05-29 | 2005-09-07 | 현대자동차주식회사 | 차간 거리 제어장치 |
| DE10326431A1 (de) * | 2003-06-10 | 2005-01-13 | Daimlerchrysler Ag | Vorrichtung und Verfahren zur Bestimmung der Position von Objekten im Umfeld eines Fahrzeuges |
| JP2005147292A (ja) * | 2003-11-17 | 2005-06-09 | Toyota Motor Corp | 変速機の変速制御装置及び変速機の変速制御方法 |
| JP4639997B2 (ja) * | 2005-02-18 | 2011-02-23 | トヨタ自動車株式会社 | 車両の減速制御装置 |
| JP3925540B2 (ja) * | 2005-03-23 | 2007-06-06 | トヨタ自動車株式会社 | 車両用走行制御装置 |
| JP4792248B2 (ja) * | 2005-06-30 | 2011-10-12 | 日立オートモティブシステムズ株式会社 | 走行制御装置,走行制御システム及びその走行制御に用いる情報を格納したナビゲーション用情報記録媒体 |
| JP4434101B2 (ja) * | 2005-08-03 | 2010-03-17 | トヨタ自動車株式会社 | 車両用駆動力制御装置 |
| EP1919751A1 (de) * | 2005-08-29 | 2008-05-14 | VDO Automotive AG | Verfahren und vorrichtung zur steuerung einer elektronischen bremse eines fahrzeugs |
| DE102005048522B4 (de) * | 2005-10-07 | 2016-08-04 | Volkswagen Ag | Verfahren und Vorrichtung zum Ansteuern eines Automatikgetriebes |
| SE528567C2 (sv) * | 2005-12-13 | 2006-12-19 | Scania Cv Abp | Datagenereringssystem |
| JP4856525B2 (ja) * | 2006-11-27 | 2012-01-18 | 富士重工業株式会社 | 先行車両離脱判定装置 |
| JP4967806B2 (ja) * | 2007-05-22 | 2012-07-04 | 株式会社日立製作所 | 経路曲率に応じた車両の速度制御装置 |
| JP2010003013A (ja) * | 2008-06-18 | 2010-01-07 | Aisin Aw Co Ltd | 運転支援装置、運転支援方法および運転支援プログラム |
| US8311720B2 (en) * | 2009-01-09 | 2012-11-13 | Robert Bosch Gmbh | Lost target function for adaptive cruise control |
| JP5311286B2 (ja) * | 2009-03-31 | 2013-10-09 | 株式会社エクォス・リサーチ | 車両制御装置、車両、及び車両制御プログラム |
| JP5234429B2 (ja) * | 2009-03-31 | 2013-07-10 | 株式会社エクォス・リサーチ | 車両制御装置、車両、及び車両制御プログラム |
| WO2010143291A1 (ja) * | 2009-06-11 | 2010-12-16 | トヨタ自動車株式会社 | 車両走行位置判定方法及び車両走行位置判定装置 |
| JP5363906B2 (ja) * | 2009-08-05 | 2013-12-11 | 株式会社アドヴィックス | 車両の速度制御装置 |
| EP2658763B1 (en) * | 2010-12-29 | 2019-03-27 | Volvo Lastvagnar AB | X adaptative cruise control |
| KR101245100B1 (ko) * | 2011-06-20 | 2013-03-25 | 주식회사 만도 | 스마트 크루즈 컨트롤 시스템 및 그 제어방법 |
| JP6363517B2 (ja) * | 2015-01-21 | 2018-07-25 | 株式会社デンソー | 車両の走行制御装置 |
| JP6252548B2 (ja) * | 2015-05-22 | 2017-12-27 | トヨタ自動車株式会社 | 車速制限装置及び車速制御装置 |
| US10183684B2 (en) * | 2016-03-31 | 2019-01-22 | General Electric Company | Multiple vehicle control system |
| WO2018106575A1 (en) * | 2016-12-05 | 2018-06-14 | Cummins Inc. | Multi-vehicle load delivery management systems and methods |
| JP6843665B2 (ja) | 2017-03-24 | 2021-03-17 | 日立Astemo株式会社 | 自動運転制御装置 |
| GB2560980B (en) * | 2017-03-31 | 2019-04-17 | Ford Global Tech Llc | A method and system for a motor vehicle |
| CN107253480B (zh) * | 2017-06-23 | 2019-10-25 | 北京新能源汽车股份有限公司 | 车辆控制方法及系统 |
| JP6687165B2 (ja) | 2017-08-24 | 2020-04-22 | 日産自動車株式会社 | 運転支援車両の走行制御方法及び走行制御装置 |
| US11097600B2 (en) * | 2017-08-25 | 2021-08-24 | Thermo King Corporation | Method and system for adaptive power engine control |
| FR3093305B1 (fr) * | 2019-02-28 | 2021-01-29 | Psa Automobiles Sa | Régulation de la vitesse d’un véhicule lors d’un dépassement en virage |
| DE102021203786A1 (de) * | 2021-04-16 | 2022-10-20 | Volkswagen Aktiengesellschaft | Verfahren zum Betreiben eines Fahrerassistenzsystems und Fahrzeug mit einem Fahrerassistenzsystem |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5843009A (ja) | 1981-09-07 | 1983-03-12 | Toyota Motor Corp | 自動車速制御装置 |
| JPS6130428A (ja) | 1984-07-20 | 1986-02-12 | Nissan Motor Co Ltd | 車両走行制御装置 |
| JPS61162776A (ja) * | 1985-01-14 | 1986-07-23 | Nissan Motor Co Ltd | 車両用レ−ダ装置 |
| JP2648309B2 (ja) | 1987-10-28 | 1997-08-27 | 富士通テン株式会社 | 自動車の車間制御装置 |
| JPH036473A (ja) | 1989-06-02 | 1991-01-11 | Mitsubishi Electric Corp | 半導体装置の静電破壊試験装置 |
| JP2803756B2 (ja) | 1989-09-29 | 1998-09-24 | マツダ株式会社 | 移動車の走行制御装置 |
| JPH0620649A (ja) | 1992-07-03 | 1994-01-28 | Toto Ltd | 金属蒸気放電灯の透光性バルブ及びその製造方法 |
| JP3070277B2 (ja) | 1992-08-04 | 2000-07-31 | 日産自動車株式会社 | 先行車両検出装置 |
| JPH06150200A (ja) | 1992-11-06 | 1994-05-31 | Toyota Motor Corp | 車両用走行制御装置 |
| JP3125496B2 (ja) * | 1993-01-12 | 2001-01-15 | トヨタ自動車株式会社 | 車両用走行制御装置 |
| JPH06320986A (ja) | 1993-05-19 | 1994-11-22 | Mazda Motor Corp | 自動車速度制御装置 |
| US5572449A (en) * | 1994-05-19 | 1996-11-05 | Vi&T Group, Inc. | Automatic vehicle following system |
| SE516317C2 (sv) * | 1994-06-07 | 2001-12-17 | Saabtech Electronics Ab | Förfarande för att bestämma körfältet för ett framförvarande fordon |
| JPH08192661A (ja) | 1995-01-20 | 1996-07-30 | Mitsubishi Motors Corp | 車両の走行制御装置 |
| JPH08240658A (ja) | 1995-03-06 | 1996-09-17 | Fujitsu Ten Ltd | レーダ装置 |
| JP3457441B2 (ja) * | 1995-10-31 | 2003-10-20 | 本田技研工業株式会社 | 自動走行車の制御方法 |
| JP3331882B2 (ja) * | 1995-12-27 | 2002-10-07 | 株式会社デンソー | 車両用障害物検出装置の中心軸偏向量算出装置,中心軸偏向量補正装置,および車間制御装置 |
| DE19722947C1 (de) * | 1997-05-31 | 1999-02-25 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Bestimmung eines zukünftigen Kursbereichs eines Fahrzeugs |
| DE19728591A1 (de) * | 1997-07-04 | 1999-01-21 | Audi Ag | Verfahren zur Bestimmung des Fahrverhaltens eines vorausfahrenden Fahrzeuges |
| DE19736966C2 (de) * | 1997-08-25 | 1999-08-05 | Mannesmann Vdo Ag | Verfahren und Anordnung zur Bestimmung eines Regelobjektes |
| DE19736964B4 (de) * | 1997-08-25 | 2011-01-20 | Continental Automotive Gmbh | Verfahren zur Bestimmung eines Regelobjektes |
| US5959569A (en) * | 1997-10-09 | 1999-09-28 | Eaton Vorad Technologies, L.L.C. | Method and apparatus for in path target determination for an automotive vehicle using a gyroscopic device |
-
1997
- 1997-12-01 DE DE69735957T patent/DE69735957T2/de not_active Expired - Fee Related
- 1997-12-01 EP EP97913481A patent/EP1034963B1/en not_active Expired - Lifetime
- 1997-12-01 US US09/555,480 patent/US6363311B1/en not_active Expired - Fee Related
- 1997-12-01 DE DE69739064T patent/DE69739064D1/de not_active Expired - Fee Related
- 1997-12-01 EP EP06003790A patent/EP1674322B1/en not_active Expired - Lifetime
- 1997-12-01 WO PCT/JP1997/004375 patent/WO1999028144A1/ja active IP Right Grant
- 1997-12-01 JP JP2000523076A patent/JP3932806B2/ja not_active Expired - Fee Related
-
2001
- 2001-10-09 US US09/971,639 patent/US6473685B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP1674322B1 (en) | 2008-10-22 |
| EP1034963B1 (en) | 2006-05-24 |
| EP1674322A1 (en) | 2006-06-28 |
| US6473685B2 (en) | 2002-10-29 |
| EP1034963A4 (en) | 2002-10-23 |
| WO1999028144A1 (fr) | 1999-06-10 |
| US6363311B1 (en) | 2002-03-26 |
| DE69735957T2 (de) | 2006-11-23 |
| US20020032514A1 (en) | 2002-03-14 |
| EP1034963A1 (en) | 2000-09-13 |
| DE69735957D1 (de) | 2006-06-29 |
| DE69739064D1 (de) | 2008-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3932806B2 (ja) | 自動車の走行制御装置 | |
| US11809194B2 (en) | Target abnormality determination device | |
| JP6376059B2 (ja) | 自動運転車両の制御装置 | |
| JP6237685B2 (ja) | 車両制御装置 | |
| JP7172257B2 (ja) | 自動運転システム | |
| JP4277907B2 (ja) | 自動車の走行制御装置 | |
| JP4781707B2 (ja) | 車両の運転支援装置 | |
| EP1818231B1 (en) | Vehicle control system | |
| CN107107751B (zh) | 目标车速生成装置及行驶控制装置 | |
| EP2712780B1 (en) | Method and apparatus for performing driving assistance | |
| US10759425B2 (en) | Autonomous driving system | |
| JP5899664B2 (ja) | 車両用加速抑制装置及び車両用加速抑制方法 | |
| JP6680403B2 (ja) | 運転支援車両の目標車速生成方法及び目標車速生成装置 | |
| US20090143951A1 (en) | Forward Collision Avoidance Assistance System | |
| JP5023869B2 (ja) | 車両用運転操作支援装置、および車両用運転操作支援方法 | |
| US9914453B2 (en) | Method for predicting the travel path of a motor vehicle and prediction apparatus | |
| JP4134885B2 (ja) | カーブ推定装置およびこれを用いた走行制御装置 | |
| JPH11321379A (ja) | 車両走行制御装置 | |
| JP2019209701A (ja) | 車両制御装置および車両制御方法 | |
| JP6558261B2 (ja) | 自動運転装置 | |
| US12012104B2 (en) | Driving control method and driving control device | |
| JP4576922B2 (ja) | 車両用走行制御装置 | |
| JP2013049425A (ja) | 車両用加速抑制装置及び車両用加速抑制方法 | |
| JPH05107355A (ja) | 車両用走行制御装置 | |
| JP2005035416A (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040426 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20060418 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061121 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070122 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070312 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110330 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110330 Year of fee payment: 4 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110330 Year of fee payment: 4 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110330 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120330 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130330 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130330 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140330 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |