JP3550068B2 - ハイブリッド車両の制御装置 - Google Patents
ハイブリッド車両の制御装置 Download PDFInfo
- Publication number
- JP3550068B2 JP3550068B2 JP2000014406A JP2000014406A JP3550068B2 JP 3550068 B2 JP3550068 B2 JP 3550068B2 JP 2000014406 A JP2000014406 A JP 2000014406A JP 2000014406 A JP2000014406 A JP 2000014406A JP 3550068 B2 JP3550068 B2 JP 3550068B2
- Authority
- JP
- Japan
- Prior art keywords
- engine
- control
- hydraulic pump
- shift
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
- B60K6/543—Transmission for changing ratio the transmission being a continuously variable transmission
Description
【0001】
【発明の属する技術分野】
本発明は、エンジン出力を無段変速機を介して車輪に伝達して走行駆動を行うとともに、エンジンと並列に配設された駆動モータによっても走行駆動が可能であり、所定の運転状態においてエンジンを一時的に停止して駆動モータにより車輪を駆動して走行駆動を行うように構成されたハイブリッド車両に関する。
【0002】
【従来の技術】
エンジン駆動と電気モータ駆動とを兼用して走行を行わせるようになったハイブリッド車両は、エンジンの燃費改善、排気ガス清浄化等を目的として実用化が進められている。このようなハイブリッド車両としては、例えば、特開平11−132321号公報に開示されたものがある。この車両は、エンジンと、このエンジンの出力軸にトルクコンバータを介して繋がれたベルト式無段変速機と、この無段変速機の出力側の動力伝達系に繋がれた第2のモータジェネレータとを備えている。この車両においては、通常走行はエンジン駆動力を無段変速機により変速して車輪に伝達して行い、車両を一時停止させる時にはエンジンも一時停止させ、この後、車両を発進させるときには第2のモータジェネレータにより車輪を駆動するようになっている。なお、このようにして車両を再発進させるときに第1のモータジェネレータによりエンジンを再始動させ、車両発進後はエンジン駆動による走行に切り換えられるように構成されている。
【0003】
このように車両を一時停止させるときにエンジンを停止させると、エンジンによる油圧ポンプ駆動も停止して無段変速機の制御油圧が失われる。このため、電動モータにより駆動される第2の油圧ポンプを設け、エンジン停止時にはこの電動モータにより第2の油圧ポンプを駆動して所定油圧を発生させ、この所定油圧を無段変速機の出力プーリシリンダ室に供給して変速比を最大(LOW)にして動力伝達が可能な状態で次の発進に備えるように構成されている。このように、上記ハイブリッド車両においては、車両を一時停止させるときにエンジンを停止させて燃費を改善し、且つ発進時には第2モータジェネレータの駆動を行わせて燃費改善を図るようにしている。
【0004】
一方、最近では、燃費改善をより一層高めることを目的として、車両が比較的高速で走行中にエンジンを停止して電気モータ駆動による走行を行わせることが考えられている。但し、この場合に、上述したような従来のハイブリッド車両の制御をそのまま用いると、走行中にエンジンを停止させて電気モータによる走行駆動を行わせる場合に変速比を最大(LOW)とする制御が行われることになり、この後、走行中に電気モータ駆動からエンジン駆動に戻したときにそのときの車速に対して変速比が最大(LOW)であるためにエンジン回転が不必要に上昇して、燃費、走行性能(ドライバビリティ)が損なわれるという問題がある。このため、本出願人は、エンジンを停止して走行するときには電動モータにより第2油圧ポンプを駆動して得られた油圧を用いて無段変速機の変速比をそのときの運転状態に応じた値となるように変速制御を行うことを考えている。
【0005】
【発明が解決しようとする課題】
ところで、上記のようにエンジンを一時停止させているときに第2油圧ポンプを駆動する電気モータはバッテリ容量等の関係からできる限り消費電力を小さくすることが要求され、第2油圧ポンプの吐出容量をできる限り小さくし、且つ変速制御油圧もできる限り低くしている。しかしながら、このように小型化した第2油圧ポンプを用いて変速制御を行う場合には達成可能な変速速度が限られ、例えば、走行中に急ブレーキ作動がなされて急減速して停止するような場合に、これに追従する変速制御ができなくなる、すなわち、変速制御が遅れるという問題がある。
【0006】
具体的には、例えば、変速比が最小(TOP)に近い状態で比較的高速で走行しているときにブレーキ作動がなされて急減速されて車両が停止されたような場合には、このように車両が急停止されるまでの短い時間で変速比を最大(LOW)に変化させる変速制御が要求される。ところが上記のように第2油圧ポンプを小型化することにより達成可能な変速速度は小さくなっているため、変速制御が遅れて車両停止時には変速比がまだ最大(LOW)まで戻りきらない中間変速比のままとなるという状態が発生する。
【0007】
ここで、車両停止時には燃費向上などを目的としてエンジンを停止させる制御が一般的であるため、車両停止時にはエンジンが停止されており、このままでは変速比は中間変速比のままであり、次にエンジンを始動させて車両を発進させるときに中間変速比からの発進制御となり、十分な発進駆動力が得られないという問題がある。また、十分な駆動力を得るために変速比を最大(LOW)に戻してから発進制御を行ったのでは、発進が遅れて走行性能が損なわれるという問題が生じる。
【0008】
本発明はこのような問題に鑑みたもので、エンジンを停止して走行中に急減速などにより急激な変速要求が生じた場合でも、このような変速要求に対応することができ、且つエンジン停止中に電気モータにより駆動される油圧ポンプを小型化、軽量化することが可能であるような構成のハイブリッド車両制御装置を提供することを目的とする。
【0009】
【課題を解決するための手段】
このような目的達成のため、本発明においては、所定の運転状態において一時的に停止制御可能なエンジン(例えば、実施形態におけるエンジンE)と、エンジンの出力軸に繋がれてその出力回転を無段階に変速する無段変速機(例えば、実施形態における金属Vベルト式無段変速機構20)と、無段変速機の出力を駆動輪に伝達する駆動力伝達系(例えば、実施形態におけるアイドラシャフト31、ファイナルドライアブギヤ32、ファイナルドリブンギヤ33、ディファレンシャル機構34、アクスルシャフト35等)と、エンジンと並列に配設されて駆動輪を駆動可能な電気駆動モータ(例えば、実施形態における第2モータジェネレータ50)とを備えてハイブリッド車両が構成され、その制御装置が、エンジンによって駆動される第1油圧ポンプ(例えば、実施形態における第1油圧ポンプ3)と、ポンプ駆動用電気モータ(例えば、実施形態におけるポンプ駆動用電気モータ55)によって駆動される第2油圧ポンプ(例えば、実施形態における第2油圧ポンプ56)とを有する。この制御装置は、所定の運転状態においてエンジンが停止されて走行中においては、ポンプ駆動用電気モータによって第2油圧ポンプを駆動して第2油圧ポンプから得られた油圧を用いて無段変速機の変速比をそのときの運転状態に応じた値となるように変速制御を行い、さらに、第2ポンプから得られた油圧による変速制御では対応できない大きな変速要求が生じたときにはエンジンを始動して第1油圧ポンプを駆動し、この第1油圧ポンプから得られた油圧を変速制御に用いる。
【0010】
なお、上記制御装置に、運転状態に応じて要求される要求変速速度と第2油圧ポンプから供給される油圧により得られる最大変速速度とを比較する判別手段を設け、この判別手段により要求変速速度が最大変速速度より大きいと判断されたときにエンジンを始動して第1油圧ポンプを駆動させるように構成しても良い。例えば、図10に示すエンジン停止許可解除判断処理制御参照。
【0011】
このような本発明に係る制御装置を用いれば、エンジンを一時停止して走行中に急ブレーキ作動等により急速な変速要求が生じたときには、エンジンが再始動されて第1油圧ポンプからの油圧も変速制御に用いられるため、第2油圧ポンプを小型化しても急速な変速要求に対応可能である。これにより、第2油圧ポンプを小型・軽量化できるだけでなく、第2油圧ポンプを駆動する電気モータも小型化できるとともにその消費電力を抑えることができる。
【0012】
【発明の実施の形態】
以下、図面を参照して本発明の好ましい実施形態について説明する。本発明に係るハイブリッド車両の動力伝達装置構成を図1に示している。この装置は、通常の走行駆動用として用いられ、一時的に停止制御が可能なエンジンEを備える。なお、このエンジンEの吸気管5から吸気負圧を取り入れて負圧を溜めておくバキュームタンク6が設けられており、バキュームタンク6の負圧をブレーキブースタ8に供給してブレーキペダル8の操作力を倍力してブレーキ作動を行わせるようになっている。
【0013】
エンジンEの出力軸Es上には第1モータジェネレータ1が設けられ、第1モータジェネレータ1によりエンジンEのスタート駆動、発進時のエンジン駆動アシストなどを行わせ、且つ減速時に発電機として用いてエネルギー回生を行う。エンジンEの出力軸Esはダンパ機構2を介して前後進切換機構10に繋がる。なお、このエンジン出力軸Es上には第1油圧ポンプ3が設けられ、この第1油圧ポンプ3はエンジンEにより駆動される。
【0014】
前後進切換機構10は、ダンパ機構2を介してエンジン出力軸Esに繋がるサンギヤ11と、サンギヤ11の周囲にこれと噛合して配設されたピニオンギヤを回転自在に支持するとともにサンギヤ11と同軸上に回転自在に配設されたキャリア12と、ピニオンギヤと噛合してサンギヤ11と同軸上に回転自在に配設されるとともに変速機入力軸21と連結されたリングギヤ13とを有したシングルピニオンタイプの遊星歯車から構成され、キャリア12とサンギヤ11(もしくはエンジン出力軸Es)とを係脱する前進クラッチ14と、キャリア12を固定保持可能な後進ブレーキ15とを有する。このため、前進クラッチ14を係合させると遊星歯車全体がエンジン出力軸Esと同一回転され、変速機入力軸21が前進側に回転駆動される。一方、後進ブレーキ15を係合させるとエンジン出力軸Esに対してリングギヤ13が反対方向に回転され、変速機入力軸21が後進側に回転駆動される。なお、前進クラッチ14と後進ブレーキ15をともに解放すると、エンジン出力軸Esと変速機入力軸21とが切り離れされる。
【0015】
変速機入力軸21を有して金属Vベルト式無段変速機構20が構成され、上記のようにして回転駆動される変速機入力軸21の回転は無段変速機構20によって無段階に変速されて変速機出力軸27に伝達される。無段変速機構20は、ドライブ側油圧シリンダ23によりプーリ幅可変調整可能なドライブプーリ22と、ドリブン側油圧シリンダ26によりプーリ幅可変調整可能なドリブンプーリ25と、両プーリ22,25間に掛けられた金属Vベルト24とから構成され、ドライブプーリ22が変速機入力軸21に連結され、ドリブンプーリ25が変速機出力軸27に連結されている。このため、ドライブおよびドリブン側油圧シリンダ23,26に供給する油圧制御を行うことにより、変速機入力軸21の回転を無段階に変速して変速機出力軸27に伝達することができる。
【0016】
変速機出力軸27には発進クラッチ30が連結されている。発進クラッチ30は油圧作動タイプのクラッチからなり、作動油圧制御により発進クラッチ30の係合制御を行う。発進クラッチ30を介して変速機入力軸27と繋がるアイドラシャフト31が回転自在に配設されており、アイドラシャフト31に結合配設されたファイナルドライブギヤ32がディファレンシャル機構34を内蔵したファイナルドリブンギヤ33と噛合している。なお、ディファレンシャル機構34は左右のアクスルシャフト34を介して左右の車輪36に繋がる(但し、図においては右側のみを示している)。
【0017】
一方、アイドラシャフト31上にはモータ側ドリブンギヤ38が結合配設されており、第2モータジェネレータ50の回転シャフト上に結合配設されたモータ側ドライブギヤ37と噛合している。このため、第2モータジェネレータ50によりアイドラシャフト31から左右の車輪36を駆動することができ、逆に、これを発電機として利用し、車輪36の駆動力を受けて回転されることによりエネルギー回生を行うことができる。
【0018】
第1および第2モータジェネレータ3,50は、パワードライブユニット52を介してバッテリ51に繋がっている。これにより、バッテリ51からの電力供給を行ってこれらモータジェネレータ3,50を駆動したり、これらモータジェネレータ3,50が回転駆動されたときに発電機として作用させて得られた電力によりバッテリを充電する(すなわち、エネルギー回生を行う)ことができるようになっている。
【0019】
また、パワードライブユニット52にはポンプ駆動用電気モータ55も繋がっており、ポンプ駆動用電気モータ55の回転駆動シャフトには第2油圧ポンプ56が連結されている。このため、バッテリ51からの電力によりポンプ駆動用電気モータ55を駆動して第2油圧ポンプ56を駆動することができる。
【0020】
以上のように構成された動力伝達装置において、エンジンEの出力もしくは第1モータジェネレータ1の出力は前後進切換機構10を介して無段変速機構20に伝達され、ここで変速された後、発進クラッチ30において伝達制御を行われ、さらに、ディファレンシャル機構34等を介して左右の車輪36に伝達される。このようにしてエンジンEもしくは第1モータジェネレータ1により車両の走行駆動が行われる。なお、減速走行時等におけるように車輪36により第1モータジェネレータ1が回転駆動されるときには、これが発電機として作用してエネルギー回生を行う。一方、第2モータジェネレータ50の出力は、アイドラシャフト31からディファレンシャル機構34等を介して左右の車輪36に伝達される。この場合にも、車輪36により第2モータジェネレータ50が回転駆動されるときには、これが発電機として作用してエネルギー回生を行う。
【0021】
以上の構成から分かるように、走行駆動制御に際しては、前進クラッチ14および後進ブレーキ15の係合制御、ドライブ側およびドリブン側油圧シリンダ23,26によりドライブおよびドリブンプーリ22,25のプーリ幅調整による変速制御、発進クラッチ30の係合制御が必要である。これらの制御等のため、変速機入力軸21(ドライブプーリ22)の回転を検出する第1回転センサ41、変速機出力軸27(ドリブンプーリ25)の回転を検出する第2回転センサ42およびファイナルドリブンギヤ33の回転(すなわち車速)を検出する第3回転センサ43が設けられている。
【0022】
これらの制御は、第1油圧ポンプ3もしくは第2油圧ポンプ56から供給される油圧を用いて行われる。この制御を行う油圧制御装置の構成を、図2〜図4の油圧回路図および図5の油圧回路模式図を参照して以下に説明する。なお、これらの図において○囲みアルファベットA〜Iで示す油路が互いに繋がる。
【0023】
この油圧制御装置は、変速機ハウジング等により形成されるオイルタンク60内の作動油を吐出供給する第1油圧ポンプ3および第2油圧ポンプ56を有する。前述のように第1油圧ポンプ3はエンジンEにより駆動され、第2油圧ポンプ56はポンプ駆動用電気モータ55により駆動される。なお、ポンプ駆動用電気モータ55により駆動される第2油圧ポンプ56の吐出油路には、リリーフバルブ57とワンウェイバルブ58とが設けられている。両油圧ポンプ3,56の吐出油は高圧レギュレータバルブ61により調圧されて高圧制御油圧が作られ、これがシフトバルブ65および低圧レギュレータバルブ64に供給される。また、低圧レギュレータバルブ64により調圧されて作られた低圧制御油圧もシフトバルブ65に供給される。
【0024】
高圧レギュレータバルブ61は高圧コントロールバルブ62からの背圧に応じて高圧制御油圧を作り出し、高圧コントロールバルブ62および低圧レギュレータバルブ64は高低圧コントロールバルブ63からの制御油圧により作動制御される。高低圧コントロールバルブ63はリニアソレノイド63aにより制御電流に応じて任意の制御油圧を作り出すものであり、このことから分かるように、高低圧コントロールバルブ63のリニアソレノイド63aに対する信号電流制御により高圧制御油圧および低圧制御油圧が設定される。
【0025】
シフトバルブ65は上記のようにして供給された高圧制御油圧および低圧制御油圧をドライブおよびドリブン側油圧シリンダ23,26に振り分け供給してドライブおよびドリブンプーリ22,25のプーリ幅調整を行って変速制御を行う。このシフトバルブ65の作動はリニアソレノイド66aにより作動されるシフトコントロールバルブ66からのシフトコントロール制御油により制御される。すなわち、リニアソレノイド66aに対する信号電流制御を行うことにより、シフトバルブ65の作動を制御して変速制御を行うことができる。
【0026】
高圧コントロールバルブ61により作られた高圧制御油圧は油路101からクラッチリデューシングバルブ72に供給されてライン圧が作られ、このライン圧が油路102に供給される。なお、高圧レギュレータバルブ61、高圧コントロールバルブ62およびクラッチリデューシングバルブ72から排出される余剰油は潤滑バルブ71により調圧されて潤滑部LUBEに供給される。油路102のライン圧は油路103から高低圧コントロールバルブ63およびシフトコントロールバルブ66に供給され、さらに、油路104から後述する発進クラッチコントロールバルブ75に供給される。
【0027】
油路102のライン圧は油路105を介して高圧コントロールソレノイドバルブ82に供給されるとともに油路105aを介して高圧コントロールバルブ62に供給されている。このため、高圧コントロールソレノイドバルブ82により高圧コントロールバルブ62に対するライン圧の供給切換制御を行って、高圧制御油圧を二段階に切換設定可能となっている。
【0028】
油路102のライン圧はさらに、油路106から前後進クラッチコントロールバルブ73を通って油路107に供給され、さらにマニュアルバルブ74を介して前進クラッチ14および後進ブレーキ15に選択供給されるようになっている。前後進クラッチコントロールバルブ73は右端に油路108aからライン圧を受けたときに図示のようにスプールが左動されて油路106と油路107とを連通させ、ライン圧が無くなったときにスプールが右動されて油路106に対して油路107を遮断させるとともに油路107をドレンに連通させる。なお、油路108aへのライン圧の作用は、油路102から油路108を介して繋がる前後進クラッチコントロールソレノイドバルブ81により制御される。
【0029】
マニュアルバルブ74は、運転席のシフトレバー操作に応じて切換作動され、P,Nレンジにおいては油路107を閉塞するとともに前進クラッチ14および後進ブレーキ15をともにドレンに連通させて、前進クラッチ14および後進ブレーキ15を解放させる。Rレンジにおいては油路107と後進ブレーキ15を連通させてライン圧を後進ブレーキ15に供給させ、これを係合させる。また、前進側のレンジ、すなわち、D,S,Lレンジにおいては油路107と前進クラッチ14を連通させてライン圧を前進クラッチに供給させ、これを係合させる。但し、前後進クラッチコントロールバルブ73の右端に油路108aからライン圧を受けて油路106と油路107とが連通した状態の場合には上記のように前進クラッチ14もしくは後進ブレーキ15の係合作動が可能であるが、油路108aへのライン圧が作用しないときには油路107は前後進クラッチコントロールバルブ73によりドレンに連通し、前進クラッチ14および後進ブレーキ15はマニュアルバルブ74の作動位置の如何に拘わらず解放される。
【0030】
前述のように油路104を介してライン圧が供給される発進クラッチコントロールバルブ75はリニアソレノイド75aにより作動が制御され、発進クラッチ制御油圧をシフトインヒビターバルブ77を介して発進クラッチ30に供給し、発進クラッチ30の係合制御が行われる。なお、シフトインヒビターバルブ77の右端部は油路110を介してシフトコントロールバルブ66に繋がる。例えば、装置の異常が発生したときや、駆動電力供給がなくなったときに、シフトコントロールバルブ66のリニアソレノイド66aの通電電流が零となり油路110に供給されるシフト制御油圧が最大とされる。
【0031】
この最大制御油圧が油路110を介してシフトインヒビターバルブ77に供給されると、そのスプールが左動されて発進クラッチコントロールバルブ75からの制御油圧供給が遮断され、これに代えてピトー制御バルブ78からピトー圧が発進クラッチ30に供給される。すなわち、この場合にはピトー圧により発進クラッチ30の係合制御が行われる。なお、この最大制御油圧はシフトバルブ65にも供給され、そのスプールを右動させて低圧制御油圧をドリブン側油圧シリンダ26に供給させるとともに高圧制御油圧をドライブ側油圧シリンダ23に供給させ、変速比をTOPにする。
【0032】
次に、以上のように構成されたハイブリッド車両の動力伝達装置における各制御について説明する。この動力伝達装置においては、基本的には、エンジンEの駆動力を前後進切換機構10および無段変速機構20を介して変速するとともに、発進クラッチ30からファイナルドライブおよびドリブンギヤ32,33、ディファレンシャル機構34、アクスルシャフト35等を介して車輪に伝達して走行駆動を行わせる。但し、発進時には第1モータジェネレータ1により駆動アシストを行うとともに減速時には第1モータジェネレータ1を発電機として作用させてエネルギー回生(バッテリ51の充電)を行う。
【0033】
さらに、車両が停止している時や、車両が比較的高速で走行している状態においては、エンジンEを一時的に停止させる制御が行われ、燃費向上を図るようになっている。ここで、車両走行中にエンジンを一時停止させるときには、第2モータジェネレータ50を駆動させて車輪36を駆動させて走行を継続する制御が行われる。このとき、前進クラッチ14および後進ブレーキ15をともに解放させて前後進切換機構10よりエンジン側における引きずりトルクの発生を防止する。一方、発進クラッチ30については無段変速機構20を無負荷回転駆動させるに必要なだけのトルク伝達を行わせる弱い係合状態となし、このように無負荷回転駆動する無段変速機構20におけるドライブおよびドリブン側油圧シリンダ23,26に対する油圧供給制御を行って無段変速機構20の変速比をそのときの運転状態に対応する値に設定する制御を行う。
【0034】
以上のような走行駆動制御内容の詳細について、以下に図6〜図18を参照して説明する。まず、図6にはエンジンの運転を継続するか、一時停止するかを判断するエンジン運転処理制御フローS10を示している。この制御においては、ステップS11においてイグニッションスイッチがオンか否かを判断し、これがオフのときにはエンジンを停止させる(ステップS22)。イグニッションスイッチがオンのときにはステップS12,S13に進み、ドライバーが要求する要求駆動力FRQを演算するとともに、そのときに第2モータジェネレータ50が出力可能な最大駆動力である最大モータ駆動力FEVを演算する。
【0035】
要求駆動力FRQの演算に際しては、まず、走行レバーが走行レンジにあるか否かを判断し、走行レンジ以外であれば要求駆動力FRQ=0に設定する。一方、走行レンジにあるときには、車速Vとアクセル開度AP(%)に応じて要求駆動力FRQを求める。このため、図7に示すように、車速Vとアクセル開度AP(%)に応じて要求駆動力FRQが予め求められて設定されており、そのときにおける実際の車速Vとアクセル開度AP(アクセルペダル踏み込み量)に対応する要求駆動力FRQを図7から読みとって設定する。なお、図7から分かるように、要求駆動力FRQは、車速Vが大きくなるほど小さく、アクセル開度APが大きくなるほど大きい。この図において、アクセル開度AP=100%とはアクセル全開(WOT)の状態を意味し、アクセル開度AP=0%とはアクセル全閉の状態を意味する。
【0036】
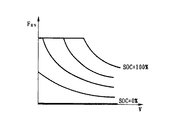
また、最大モータ駆動力FEVは、バッテリ51の残容量SOCと車速Vから求められる。このため、図8に示すように、車速Vとバッテリ残容量SOCに応じて最大モータ駆動力FEVが予め求められて設定されており、そのときにおける実際の車速Vとバッテリ残容量SOCに対応する最大モータ駆動力FEVを図8から読みとって設定する。なお、図8から分かるように、最大モータ駆動力FEVは車速Vが大きくなるほど小さく、バッテリ残容量SOCが大きいほど大きい。
【0037】
次に、ステップS14においてこのようにして演算された要求駆動力FRQと最大モータ駆動力FEVとを比較し、FEV<FRQのときにはエンジン運転制御を選択し、エンジン運転時処理制御を行う(ステップS18,S19)。すなわち、要求駆動力FRQが最大モータ駆動力FEVより大きいときには第2モータジェネレータ50によっては十分な駆動が行えないため、エンジンEによる駆動を行わせる。
【0038】
逆に、FEV≧FRQのときには第2モータジェネレータ50による駆動走行が可能であるため、ステップS15においてエンジンを一時停止することが可能か否かを判断する。さらに、ステップS16においてエンジン一時停止を許可している状態からこれを解除すべきか否か、すなわち、エンジンを再始動すべきか否かを判断する。エンジン一時停止が許可されない場合もしくはエンジン一時停止許可が解除された場合には、ステップS17からステップS18,S19に進み、上述のようにエンジン運転時処理制御を行う。一方、エンジン一時停止が可能である場合には、ステップS20,S21に進み、エンジンを停止させるとともにエンジン停止時処理を行う。
【0039】
以上の制御フローにおいて、ステップS19におけるエンジン運転時処理制御は、従来から行われている制御であり、例えば前進レンジでは、前進クラッチ14を係合させるとともに発進クラッチ30の係合制御を行って車両を発進させ、発進後は運転状態に応じて無段変速機構20による変速制御を行って、車両を走行させる制御がなされる。この制御は、従来から一般的に行われている制御であるため、ここではその内容説明は省略する。
【0040】
以下において、エンジンを一時停止させる制御について説明するが、まず、上記エンジン運転処理フローS10におけるエンジン停止許可判断制御S15について、図9を参照して説明する。この制御フローでは、まず、バッテリ残容量SOCが所定値以上か否かが判断され、バッテリ残容量SOCが所定値未満すなわち残容量が少ないときにはステップS35に進みエンジン停止制御を行わせない。エンジンを停止した場合、再始動のための電力と、エンジン停止中に補機類を駆動するための電力が最低限必要であり、上記所定値はこのような電力の余裕があるか否かを判断するための値である。この値は想定するエンジン停止時間に応じて変化するが、例えば、約100Wh程度に設定される。一方、残容量が所定以上であるときには、ステップS32に進み、ブレーキ負圧(すなわち、図1に示すバキュームタンク6内の負圧)が所定値以下か否かを判断する。
【0041】
ステップS32において、ブレーキ負圧が所定値を越えると判断されたとき(すなわち、ブレーキ負圧が不足すると判断されたとき)にはブレーキブースタ7により十分な倍力作用が得られず安全な制動が行えないおそれがあるため、ステップS35に進み、エンジン停止制御を行わせずにエンジン運転を継続してブレーキ負圧を蓄積させる。なお、この所定値は、バキュームタンク6の容量に応じて変化するが、例えば、250mmHg程度に設定される。ブレーキ負圧が所定値以下であり、ブレーキブースタ7により十分な倍力作用が得られる場合にはステップS33に進み、エンジンの暖機運転が完了したか否かを判断する。
【0042】
そして、暖機運転が未了のときにはまずエンジンの暖機を完了させることを優先し、ステップS35に進んでエンジン停止制御を行わせず、エンジン運転を継続させる。一方、暖機運転が完了のときにはステップS34に進みエンジン停止を許可する。このように、バッテリ残容量が十分あり、ブレーキ負圧も十分蓄えられており、暖機運転が完了している場合にのみエンジン停止を許可する。
【0043】
次に、上記エンジン運転処理フローS10におけるエンジン停止許可解除判断処理制御S16について、図10を参照して説明する。この制御フローでは、まず、ステップS90においてエンジン停止許可が出されているか否かを判断し、停止許可がでていない場合にはこれを解除する処理は不要であり、今回のフローをそのまま終了する。エンジン停止許可が出されている場合にはステップS91,S92に進んで、車速Vを検出するとともに加速度dV/dtを算出する。そして、このように算出された加速度dV/dtが負の値か否か、すなわち、車両が減速状態であるか否かが判断され(ステップS93)、これが正もしくは零のとき(加速もしくは定速走行状態のとき)には変速比の急激な変化は起こり得ないため、エンジン停止許可が出されていてもこれを解除する処理は不要であり、今回のフローをこのまま終了する。
【0044】
一方、加速度dV/dtが負の値、すなわち、減速状態であると判断されたときには、ステップS94に進み車速Vが所定車速V0より大きいか否かが判断される。この所定車速V0は、この所定車速V0で走行したときに第2回転センサ42によるドリブンプーリ25の回転検出が可能な最小の速度であり、具体的には約5km/hである。車速Vが所定車速V0以下になるとドリブンプーリ25の回転が小さすぎて速やかな変速制御が不可能となるので、V≦V0の場合にはこのまま今回のフローを終了する。
【0045】
一方、V>V0の場合には、ステップS95において、要求減速時間Tvを演算する。この要求減速時間Tvは現在の減速度(負の加速度)のままで車速Vを所定車速V0まで減速させるのに要求される時間であり、Tv=(V0−V)/(dV/dt)により演算される。
【0046】
次に、ステップS96に進み、ポンプ駆動用電気モータ55により駆動される第2油圧ポンプ56から得られる油圧を用いて達成可能な最大変速速度で、現在の変速比RAから所定変速比ROまで変速を行わせるために必要な最大減速時間Trを検索する。ここで所定変速比ROは車両停止状態から発進するときに十分な駆動力を発揮できる最低の(LOW側の)変速比であり、無段変速機構20の最大変速比(LOW)の約90%以上の変速比が設定される。すなわち、LOW変速比に近い変速比が所定変速比ROとして設定される。このことから分かるように、現在の変速比RAから十分な発進駆動力が発揮できる変速比ROまで、第2油圧ポンプ56からの油圧により達成可能な最短変速時間が最大減速時間Trである。この最大減速時間Trは、図11に示すように、変速機油温toと現在の変速比RAとに対応して実験的に予め求められて設定されており、このグラフから検索して求められる。
【0047】
次に、上記のように求められた要求減速時間Tvと最大減速時間Trとを比較し(ステップS97)、Tv≧Trのときにはそのままエンジン停止許可制御を維持し、Tv<Trのときにはエンジン停止許可を解除する、すなわち、エンジンを再始動させる(ステップS98)。このことから分かるように、要求減速時間Tvは、特許請求の範囲に定義する「運転状態に応じて要求される要求変速速度」に対応する値であり、最大減速時間は、「第2油圧ポンプから供給される油圧により得られる最大変速速度」に対応する値である。
【0048】
この制御について、図12を参照して具体的に説明する。まず、図12(A)には、現在の変速比RAで走行中に、第2油圧ポンプ56からの油圧により達成可能な最大変速速度でLOW側に変速した場合の変速比の時間変化を示しており、縦軸が変速比RATIOを示し横軸が時間tを示す。この図から分かるように、このときの変速時間が最大減速時間Trである。図12(B)および(C)には、ブレーキ作動等がなされて減速されるときにおける、減速度dV/dtと、この減速度で所定車速V0まで減速するために要求される要求減速時間Tvとの関係を示している。
【0049】
図12(B)は減速度dV/dtが比較的小さい場合を示し、図12(C)は減速度dV/dtが大きい場合を示す。図12(B)の減速の場合には、比較的緩やかな減速であるため最大減速時間Trより要求減速時間Tvが長く、変速比が所定変速比ROまで変速された時点においてはまだ車両は走行中である。この場合には、車両が走行中で変速制御が可能な間に変速比が所定変速比ROまで変速するため、エンジン停止許可状態のまま停車させても次の発進に必要な所定変速比ROが得られており、エンジン停止許可を保持させる。
【0050】
一方、図12(C)の減速の場合には、最大減速時間Trより要求減速時間Tvが短く、変速比が所定変速比ROまで変速された時点において既に車両は停止している。この場合には、車両が停止して変速制御が不可能となった時点でも変速比はまで所定変速比ROまで変速されていないため、エンジン停止許可を解除する制御を行う。これにより、変速比RAの状態で減速が開始されたときにエンジンが再始動され、第1油圧ポンプ3が駆動されて、その吐出油圧を用いて急速な変速制御がなされ、車両が停止する前に次の発進に必要な所定変速比ROが得られる。このことから分かるように、エンジンにより駆動される第1油圧ポンプ3の容量を十分大きなものにしておけば、ポンプ駆動用電気モータ55により駆動される第2油圧ポンプ56を小型コンパクトなものとしても、問題のない変速制御が可能である。
【0051】
上記のようにしてエンジン停止が許可されたときに行われるエンジン停止時処理制御(ステップS20)の内容について図13を参照して説明する。この制御においては、まず、インヒビタソレノイドバルブすなわちクラッチコントロールソレノイドバルブ81(図3参照)を駆動させる(ステップS41)。クラッチコントロールソレノイドバルブ81はノーマルクローズタイプのソレノイドバルブであり、これを駆動することにより油路108,108aをドレンに連通させて前後進クラッチコントロールバルブ73の右端への作動油圧を零にする。この結果、前述したように、油路107がドレンに連通し、マニュアルバルブ74を介して行われていた前進クラッチ14もしくは後進ブレーキ15へのライン圧が遮断され、前進クラッチ14および後進ブレーキ15がともに解放された状態となる。
【0052】
これにより、エンジン出力軸Esと変速機入力軸21とが前後進切換機構10において切り離され、変速機入力軸21よりエンジン側に変速機側の回転が伝達されることがなくなり、エンジン側における引きずりトルクの発生が阻止される。すなわち、エンジンEを一時停止して第2モータジェネレータ50により車輪36を駆動して走行するときに、その回転は前後進切換機構10において切り離されてエンジン側に伝達されないため、エンジンEと前後進切換機構10の間の回転部材による引きずりトルクが発生せず、第2モータジェネレータ50の駆動力が効率よく車輪36に伝達される。このため、バッテリ51の駆動電力を無駄にすることがなく、且つ減速時等に車輪36からの駆動により第2モータジェネレータ50が駆動されるときに効率のよいエネルギー回生を行うことができる。
【0053】
次に、エンジンを一時停止している間における目標変速比RTを演算する(ステップS42)。目標変速比比RTは、図14に示すように、車速Vとアクセル開度(アクセルペダル踏み込み量)APに応じて決められ、車速Vが大きくなるほど小さくなり、アクセル開度が大きくなるほど大きくなる値に設定される。具体的には、ドライバーがアクセルペダルを徐々に踏み込むことにより要求駆動力が高まってエンジンが再始動される場合には、エンジンを再始動する直前の目標変速比が、エンジンを再始動して発進クラッチ30を締結したときにエンジンEの回転が略2000rpmとなるように設定される。一方、アクセルペダルの踏み込み量が比較的小さく、要求駆動力も大きくない場合には、エンジンを再始動して発進クラッチ30を締結したときにエンジンEの回転が略1200〜1500rpmとなるように設定される。
【0054】
このようにしてステップS42において目標変速比が演算されると、この目標変速比に基づいて第2油圧ポンプ(電動オイルポンプ)56を駆動する必要があるか否かを判断する(ステップS43)。この判断制御内容を図15に示しており、ここではまずタイマーが終了しているか否かを判断する(ステップS51)。なお、初期状態ではタイマーが終了状態となっている。タイマーが終了している場合には、ステップS52に進み、実変速比RA(=NDR/NDN)を計算する。但し、NDRは第1回転センサ41により検出されるドライブプーリ22の回転数であり、NDNは第2回転センサ42により検出されるドリブンプーリ25の回転数である。
【0055】
次に、ステップS53に進み、変速比偏差RE(=RT−RA)を計算する。変速比偏差REの絶対値が所定値よりも大きい、すなわち変速比偏差REが大きい場合は変速制御が必要であるため、ポンプ駆動用電気モータ55により第2油圧ポンプ56を駆動する。このときステップS55においてタイマーがセットされ、一旦第2油圧ポンプ56が駆動されるとタイマーにより設定された時間の間これを継続して駆動する。このように、タイマーを用いることによりポンプ駆動用電気モータ55のオン・オフの頻度を少なくし、オン・オフ制御を行うスイッチ素子(リレー)の耐久性を向上させている。一方、変速比偏差REの絶対値が所定値よりも小さいときには変速の必要がなく、第2油圧ポンプ56の駆動は停止される(ステップS57)。
【0056】
以上のようにステップS43において電動オイルポンプすなわち第2油圧ポンプ56の駆動判断がなされ、これを駆動するときにはステップS44からステップS45に進み、発進クラッチ処理制御を行う。この制御内容を図16に示しており、この制御においてはまず変速機油温toを検出する(ステップS61)。次に、発進クラッチ係合トルクTcを演算し、この係合トルクTcを得るために発進クラッチ30に供給する油圧を設定する指令信号を出力して、発進クラッチコントロールバルブ75の作動を制御する。なお、発進クラッチ係合トルクTcは、変速機油温toと車速Vとに応じて、図17に示すように設定される。エンジンを停止した状態で走行しているときには、このときの走行状態(運転状態)に応じた変速比が得られるように無段変速機構20を無負荷回転させる必要がある。発進クラッチ係合トルクTcはこのように無段変速機構20を無負荷回転させるために必要な駆動力を伝達させるため要求されるトルク値であり、油温toが低いほど大きく、車速Vが大きいほど大きくなるトルクTcが図17に示すように設定される。
【0057】
次に、ステップS45からステップS46に進み、プーリ変速処理すなわち無段変速機構20における変速処理制御を行う。この制御内容を図18に示しており、この制御においてはまず、変速比偏差REが正か負かを判断する(ステップS71)。変速比偏差REが負で実変速比RAが目標変速比RTより大きい場合には、変速比を小さく(OD(オーバードライブ)側に)する必要があり、逆に、変速比偏差REが正で実変速比RAが目標変速比RTより小さい場合には、変速比を大きく(LOW側に)する必要がある。
【0058】
このため、変速比偏差REが負の場合にはステップS72に進み、変速比偏差REと、負の値でありその絶対値が比較的小さい第1の所定値とを比較する。変速比偏差REが第1の所定値より大きい場合(零に近い)には変速の必要がないと判断して前回の変速指令値をホールドする(ステップS76)。変速比偏差REが第1の所定値より小さい場合(絶対値がより大きな負の値である場合)にはステップS73に進み、負の値でありその絶対値が比較的大きな第2の所定値と変速比偏差REとを比較する。変速比偏差REが第2の所定値より大きい場合(零に近い)には緩やかなOD側への変速が必要と判断し、変速指令値としてOD側緩変速指令値を設定する(ステップS75)。一方、変速比偏差REが第2の所定値より小さい場合(絶対値がより大きな負の値である場合)には急速なOD側への変速が必要と判断し、変速指令値としてOD側急変速指令値を設定する(ステップS74)。
【0059】
一方、ステップS71において変速比偏差が正の値であると判断された場合には、ステップS77に進み、変速比偏差REと、正の値でありその絶対値が比較的小さい第3の所定値とを比較する。変速比偏差REが第3の所定値より小さい場合(零に近い)には変速の必要がないと判断して前回の変速指令値をホールドする(ステップS79)。変速比偏差REが第3の所定値より大きい場合にはステップS78に進み、正の値でありその絶対値が比較的大きな第4の所定値と変速比偏差REとを比較する。変速比偏差REが第4の所定値より小さい場合には緩やかなLOW側への変速が必要と判断し、変速指令値としてLOW側緩変速指令値を設定する(ステップS80)。一方、変速比偏差REが第4の所定値より大きい場合には急速なLOW側への変速が必要と判断し、変速指令値としてLOW側急変速指令値を設定する(ステップS81)。
【0060】
このようにして設定された変速指令値に基づいてシフトコントロールバルブ66の作動が制御され、シフトバルブ65によるドライブおよびドリブン側油圧シリンダ23,26への高圧および低圧制御油圧の供給制御がなされて変速指令値に対応する変速制御が行われる。
【0061】
以上、エンジン一時停止を行うときの各種制御内容を説明したが、この制御は特に、エンジン一時停止時に、前後進切換機構10における前進クラッチ14および後進ブレーキ15を解放してエンジン側との連結を切り離すことと、ポンプ駆動用電気モータ55による第2油圧ポンプ56の駆動を変速比偏差が大きくなったときに限定することと、変速比偏差が大きくなったときには発進クラッチ30を弱係合させて無段変速機構20を無負荷回転駆動させるとともにそのときの運転状態に対応する目標変速比が得られるような変速制御を行うこととを特徴とする。
【0062】
これにより、エンジンを一時停止させて第2モータジェネレータ50による走行駆動を行うときに、前後進切換機構10よりエンジン側における回転引きずりトルクの発生がなくなり、第2モータジェネレータ50の駆動効率や、これが車輪から駆動されて発電機として作用するときのエネルギー再生効率が向上する。また、第2モータジェネレータ50による駆動中においては無段変速機構の変速制御は不要であるが、この間も運転状態に対応した変速比が得られるように変速制御を行うため、エンジンを再始動したときにエンジン回転が吹きあがることなくスムーズにエンジン駆動制御に移行させることができる。また、このような無段変速機構20の変速制御に際して、無段変速機構20は無負荷運転状態で変速制御を行うだけであるため変速用油圧は低圧でよく、変速制御エネルギーが小さくて良いという利点がある。同様に、発進クラッチ30は無段変速機構20を無負荷回転させるに必要な小さなトルクを伝達させるだけの弱係合を行わせるだけでよく、発進クラッチ30の係合制御エネルギーも小さくて良い。
【0063】
なお、以上においては、金属Vベルト式無段変速機構を用いた動力伝達装置を例にして説明したが、無段変速機構はこのようなタイプのものに限られるものではない。また、エンジン一時停止に際して、前後進切換機構によりエンジン側と無段変速機構側とを切り離すように構成している(すなわち、特許請求の範囲の係脱制御手段を前後進切換機構の前進クラッチおよび後進ブレーキにより構成している)が、無段変速機構の入力軸上に別のクラッチを配設して、このクラッチにより特許請求の範囲の係脱制御手段を構成し、エンジン一時停止時にこのクラッチを解放させるように構成しても良い。
【0064】
【発明の効果】
以上説明したように、本発明によれば、所定の運転状態においてエンジンが停止されて走行中においては、ポンプ駆動用電気モータによって第2油圧ポンプを駆動して第2油圧ポンプから得られた油圧を用いて無段変速機の変速比をそのときの運転状態に応じた値となるように変速制御を行い、さらに、第2ポンプから得られた油圧による変速制御では対応できない大きな変速要求が生じたときにはエンジンを始動して第1油圧ポンプを駆動し、この第1油圧ポンプから得られた油圧を変速制御に用いるように制御装置が構成されているため、エンジンを一時停止して走行中に急ブレーキ作動等により急速な変速要求が生じたときには、エンジンが再始動されて第1油圧ポンプからの油圧も変速制御に用いられ、第2油圧ポンプを小型化しても急速な変速要求に対応可能である。これにより、第2油圧ポンプを小型・軽量化できるだけでなく、第2油圧ポンプを駆動する電気モータも小型化できるとともにその消費電力を抑えることができる。
【0065】
なお、運転状態に応じて要求される要求変速速度と第2油圧ポンプから供給される油圧により得られる最大変速速度とを比較する判別手段を設け、この判別手段により要求変速速度が最大変速速度より大きいと判断されたときにエンジンを始動して第1油圧ポンプを駆動させるように構成しても良い。
【図面の簡単な説明】
【図1】本発明に係るハイブリッド車両の動力伝達装置構成を示す概略図である。
【図2】上記動力伝達装置における作動制御を行う装置構成を示す油圧回路図である。
【図3】上記動力伝達装置における作動制御を行う装置構成を示す油圧回路図である。
【図4】上記動力伝達装置における作動制御を行う装置構成を示す油圧回路図である。
【図5】上記動力伝達装置における作動制御を行う装置構成を示す油圧回路模式図である。
【図6】上記動力伝達装置における走行駆動制御内容を示すフローチャートである。
【図7】上記走行駆動制御に用いられる要求駆動力FRQと車速Vおよびアクセル開度APの関係を示すグラフである。
【図8】上記走行駆動制御における最大モータ駆動力FEVと車速Vおよびバッテリ残容量SOCの関係を示すグラフである。
【図9】図6の制御におけるエンジン停止許可判断制御の内容を示すフローチャートである。
【図10】図6の制御におけるエンジン停止許可解除判断処理制御の内容を示すフローチャートである。
【図11】上記エンジン停止許可解除判断処理制御における現在の変速比RAと変速機油温toと、最大減速時間Trとの関係を示すグラフである。
【図12】減速走行により変速比をRAからROまで変速させるときにおける要求減速時間Tvと最大減速時間Trとの関係を示すグラフである。
【図13】図6の制御におけるエンジン停止時処理制御の内容を示すフローチャートである。
【図14】図13の制御において演算される目標変速比RTと車速Vおよびアクセル開度APとの関係を示すグラフである。
【図15】図13の制御における電動オイルポンプ駆動判断制御の内容を示すフローチャートである。
【図16】図13の制御における発進クラッチ処理制御の内容を示すフローチャートである。
【図17】図16の制御において演算される発進クラッチトルクTcと車速Vおよび変速機油温toとの関係を示すグラフである。
【図18】図13の制御におけるプーリ変速処理制御の内容を示すフローチャートである。
【符号の説明】
E エンジン
3 第1油圧ポンプ
20 金属Vベルト式無段変速機構
31 アイドラシャフト(駆動力伝達系)
32 ファイナルドライアブギヤ(駆動力伝達系)
33 ファイナルドリブンギヤ(駆動力伝達系)
34 ディファレンシャル機構(駆動力伝達系)
35 アクスルシャフト(駆動力伝達系)
50 第2モータジェネレータ(電気駆動モータ)
55 ポンプ駆動用電気モータ
56 第2油圧ポンプ
【発明の属する技術分野】
本発明は、エンジン出力を無段変速機を介して車輪に伝達して走行駆動を行うとともに、エンジンと並列に配設された駆動モータによっても走行駆動が可能であり、所定の運転状態においてエンジンを一時的に停止して駆動モータにより車輪を駆動して走行駆動を行うように構成されたハイブリッド車両に関する。
【0002】
【従来の技術】
エンジン駆動と電気モータ駆動とを兼用して走行を行わせるようになったハイブリッド車両は、エンジンの燃費改善、排気ガス清浄化等を目的として実用化が進められている。このようなハイブリッド車両としては、例えば、特開平11−132321号公報に開示されたものがある。この車両は、エンジンと、このエンジンの出力軸にトルクコンバータを介して繋がれたベルト式無段変速機と、この無段変速機の出力側の動力伝達系に繋がれた第2のモータジェネレータとを備えている。この車両においては、通常走行はエンジン駆動力を無段変速機により変速して車輪に伝達して行い、車両を一時停止させる時にはエンジンも一時停止させ、この後、車両を発進させるときには第2のモータジェネレータにより車輪を駆動するようになっている。なお、このようにして車両を再発進させるときに第1のモータジェネレータによりエンジンを再始動させ、車両発進後はエンジン駆動による走行に切り換えられるように構成されている。
【0003】
このように車両を一時停止させるときにエンジンを停止させると、エンジンによる油圧ポンプ駆動も停止して無段変速機の制御油圧が失われる。このため、電動モータにより駆動される第2の油圧ポンプを設け、エンジン停止時にはこの電動モータにより第2の油圧ポンプを駆動して所定油圧を発生させ、この所定油圧を無段変速機の出力プーリシリンダ室に供給して変速比を最大(LOW)にして動力伝達が可能な状態で次の発進に備えるように構成されている。このように、上記ハイブリッド車両においては、車両を一時停止させるときにエンジンを停止させて燃費を改善し、且つ発進時には第2モータジェネレータの駆動を行わせて燃費改善を図るようにしている。
【0004】
一方、最近では、燃費改善をより一層高めることを目的として、車両が比較的高速で走行中にエンジンを停止して電気モータ駆動による走行を行わせることが考えられている。但し、この場合に、上述したような従来のハイブリッド車両の制御をそのまま用いると、走行中にエンジンを停止させて電気モータによる走行駆動を行わせる場合に変速比を最大(LOW)とする制御が行われることになり、この後、走行中に電気モータ駆動からエンジン駆動に戻したときにそのときの車速に対して変速比が最大(LOW)であるためにエンジン回転が不必要に上昇して、燃費、走行性能(ドライバビリティ)が損なわれるという問題がある。このため、本出願人は、エンジンを停止して走行するときには電動モータにより第2油圧ポンプを駆動して得られた油圧を用いて無段変速機の変速比をそのときの運転状態に応じた値となるように変速制御を行うことを考えている。
【0005】
【発明が解決しようとする課題】
ところで、上記のようにエンジンを一時停止させているときに第2油圧ポンプを駆動する電気モータはバッテリ容量等の関係からできる限り消費電力を小さくすることが要求され、第2油圧ポンプの吐出容量をできる限り小さくし、且つ変速制御油圧もできる限り低くしている。しかしながら、このように小型化した第2油圧ポンプを用いて変速制御を行う場合には達成可能な変速速度が限られ、例えば、走行中に急ブレーキ作動がなされて急減速して停止するような場合に、これに追従する変速制御ができなくなる、すなわち、変速制御が遅れるという問題がある。
【0006】
具体的には、例えば、変速比が最小(TOP)に近い状態で比較的高速で走行しているときにブレーキ作動がなされて急減速されて車両が停止されたような場合には、このように車両が急停止されるまでの短い時間で変速比を最大(LOW)に変化させる変速制御が要求される。ところが上記のように第2油圧ポンプを小型化することにより達成可能な変速速度は小さくなっているため、変速制御が遅れて車両停止時には変速比がまだ最大(LOW)まで戻りきらない中間変速比のままとなるという状態が発生する。
【0007】
ここで、車両停止時には燃費向上などを目的としてエンジンを停止させる制御が一般的であるため、車両停止時にはエンジンが停止されており、このままでは変速比は中間変速比のままであり、次にエンジンを始動させて車両を発進させるときに中間変速比からの発進制御となり、十分な発進駆動力が得られないという問題がある。また、十分な駆動力を得るために変速比を最大(LOW)に戻してから発進制御を行ったのでは、発進が遅れて走行性能が損なわれるという問題が生じる。
【0008】
本発明はこのような問題に鑑みたもので、エンジンを停止して走行中に急減速などにより急激な変速要求が生じた場合でも、このような変速要求に対応することができ、且つエンジン停止中に電気モータにより駆動される油圧ポンプを小型化、軽量化することが可能であるような構成のハイブリッド車両制御装置を提供することを目的とする。
【0009】
【課題を解決するための手段】
このような目的達成のため、本発明においては、所定の運転状態において一時的に停止制御可能なエンジン(例えば、実施形態におけるエンジンE)と、エンジンの出力軸に繋がれてその出力回転を無段階に変速する無段変速機(例えば、実施形態における金属Vベルト式無段変速機構20)と、無段変速機の出力を駆動輪に伝達する駆動力伝達系(例えば、実施形態におけるアイドラシャフト31、ファイナルドライアブギヤ32、ファイナルドリブンギヤ33、ディファレンシャル機構34、アクスルシャフト35等)と、エンジンと並列に配設されて駆動輪を駆動可能な電気駆動モータ(例えば、実施形態における第2モータジェネレータ50)とを備えてハイブリッド車両が構成され、その制御装置が、エンジンによって駆動される第1油圧ポンプ(例えば、実施形態における第1油圧ポンプ3)と、ポンプ駆動用電気モータ(例えば、実施形態におけるポンプ駆動用電気モータ55)によって駆動される第2油圧ポンプ(例えば、実施形態における第2油圧ポンプ56)とを有する。この制御装置は、所定の運転状態においてエンジンが停止されて走行中においては、ポンプ駆動用電気モータによって第2油圧ポンプを駆動して第2油圧ポンプから得られた油圧を用いて無段変速機の変速比をそのときの運転状態に応じた値となるように変速制御を行い、さらに、第2ポンプから得られた油圧による変速制御では対応できない大きな変速要求が生じたときにはエンジンを始動して第1油圧ポンプを駆動し、この第1油圧ポンプから得られた油圧を変速制御に用いる。
【0010】
なお、上記制御装置に、運転状態に応じて要求される要求変速速度と第2油圧ポンプから供給される油圧により得られる最大変速速度とを比較する判別手段を設け、この判別手段により要求変速速度が最大変速速度より大きいと判断されたときにエンジンを始動して第1油圧ポンプを駆動させるように構成しても良い。例えば、図10に示すエンジン停止許可解除判断処理制御参照。
【0011】
このような本発明に係る制御装置を用いれば、エンジンを一時停止して走行中に急ブレーキ作動等により急速な変速要求が生じたときには、エンジンが再始動されて第1油圧ポンプからの油圧も変速制御に用いられるため、第2油圧ポンプを小型化しても急速な変速要求に対応可能である。これにより、第2油圧ポンプを小型・軽量化できるだけでなく、第2油圧ポンプを駆動する電気モータも小型化できるとともにその消費電力を抑えることができる。
【0012】
【発明の実施の形態】
以下、図面を参照して本発明の好ましい実施形態について説明する。本発明に係るハイブリッド車両の動力伝達装置構成を図1に示している。この装置は、通常の走行駆動用として用いられ、一時的に停止制御が可能なエンジンEを備える。なお、このエンジンEの吸気管5から吸気負圧を取り入れて負圧を溜めておくバキュームタンク6が設けられており、バキュームタンク6の負圧をブレーキブースタ8に供給してブレーキペダル8の操作力を倍力してブレーキ作動を行わせるようになっている。
【0013】
エンジンEの出力軸Es上には第1モータジェネレータ1が設けられ、第1モータジェネレータ1によりエンジンEのスタート駆動、発進時のエンジン駆動アシストなどを行わせ、且つ減速時に発電機として用いてエネルギー回生を行う。エンジンEの出力軸Esはダンパ機構2を介して前後進切換機構10に繋がる。なお、このエンジン出力軸Es上には第1油圧ポンプ3が設けられ、この第1油圧ポンプ3はエンジンEにより駆動される。
【0014】
前後進切換機構10は、ダンパ機構2を介してエンジン出力軸Esに繋がるサンギヤ11と、サンギヤ11の周囲にこれと噛合して配設されたピニオンギヤを回転自在に支持するとともにサンギヤ11と同軸上に回転自在に配設されたキャリア12と、ピニオンギヤと噛合してサンギヤ11と同軸上に回転自在に配設されるとともに変速機入力軸21と連結されたリングギヤ13とを有したシングルピニオンタイプの遊星歯車から構成され、キャリア12とサンギヤ11(もしくはエンジン出力軸Es)とを係脱する前進クラッチ14と、キャリア12を固定保持可能な後進ブレーキ15とを有する。このため、前進クラッチ14を係合させると遊星歯車全体がエンジン出力軸Esと同一回転され、変速機入力軸21が前進側に回転駆動される。一方、後進ブレーキ15を係合させるとエンジン出力軸Esに対してリングギヤ13が反対方向に回転され、変速機入力軸21が後進側に回転駆動される。なお、前進クラッチ14と後進ブレーキ15をともに解放すると、エンジン出力軸Esと変速機入力軸21とが切り離れされる。
【0015】
変速機入力軸21を有して金属Vベルト式無段変速機構20が構成され、上記のようにして回転駆動される変速機入力軸21の回転は無段変速機構20によって無段階に変速されて変速機出力軸27に伝達される。無段変速機構20は、ドライブ側油圧シリンダ23によりプーリ幅可変調整可能なドライブプーリ22と、ドリブン側油圧シリンダ26によりプーリ幅可変調整可能なドリブンプーリ25と、両プーリ22,25間に掛けられた金属Vベルト24とから構成され、ドライブプーリ22が変速機入力軸21に連結され、ドリブンプーリ25が変速機出力軸27に連結されている。このため、ドライブおよびドリブン側油圧シリンダ23,26に供給する油圧制御を行うことにより、変速機入力軸21の回転を無段階に変速して変速機出力軸27に伝達することができる。
【0016】
変速機出力軸27には発進クラッチ30が連結されている。発進クラッチ30は油圧作動タイプのクラッチからなり、作動油圧制御により発進クラッチ30の係合制御を行う。発進クラッチ30を介して変速機入力軸27と繋がるアイドラシャフト31が回転自在に配設されており、アイドラシャフト31に結合配設されたファイナルドライブギヤ32がディファレンシャル機構34を内蔵したファイナルドリブンギヤ33と噛合している。なお、ディファレンシャル機構34は左右のアクスルシャフト34を介して左右の車輪36に繋がる(但し、図においては右側のみを示している)。
【0017】
一方、アイドラシャフト31上にはモータ側ドリブンギヤ38が結合配設されており、第2モータジェネレータ50の回転シャフト上に結合配設されたモータ側ドライブギヤ37と噛合している。このため、第2モータジェネレータ50によりアイドラシャフト31から左右の車輪36を駆動することができ、逆に、これを発電機として利用し、車輪36の駆動力を受けて回転されることによりエネルギー回生を行うことができる。
【0018】
第1および第2モータジェネレータ3,50は、パワードライブユニット52を介してバッテリ51に繋がっている。これにより、バッテリ51からの電力供給を行ってこれらモータジェネレータ3,50を駆動したり、これらモータジェネレータ3,50が回転駆動されたときに発電機として作用させて得られた電力によりバッテリを充電する(すなわち、エネルギー回生を行う)ことができるようになっている。
【0019】
また、パワードライブユニット52にはポンプ駆動用電気モータ55も繋がっており、ポンプ駆動用電気モータ55の回転駆動シャフトには第2油圧ポンプ56が連結されている。このため、バッテリ51からの電力によりポンプ駆動用電気モータ55を駆動して第2油圧ポンプ56を駆動することができる。
【0020】
以上のように構成された動力伝達装置において、エンジンEの出力もしくは第1モータジェネレータ1の出力は前後進切換機構10を介して無段変速機構20に伝達され、ここで変速された後、発進クラッチ30において伝達制御を行われ、さらに、ディファレンシャル機構34等を介して左右の車輪36に伝達される。このようにしてエンジンEもしくは第1モータジェネレータ1により車両の走行駆動が行われる。なお、減速走行時等におけるように車輪36により第1モータジェネレータ1が回転駆動されるときには、これが発電機として作用してエネルギー回生を行う。一方、第2モータジェネレータ50の出力は、アイドラシャフト31からディファレンシャル機構34等を介して左右の車輪36に伝達される。この場合にも、車輪36により第2モータジェネレータ50が回転駆動されるときには、これが発電機として作用してエネルギー回生を行う。
【0021】
以上の構成から分かるように、走行駆動制御に際しては、前進クラッチ14および後進ブレーキ15の係合制御、ドライブ側およびドリブン側油圧シリンダ23,26によりドライブおよびドリブンプーリ22,25のプーリ幅調整による変速制御、発進クラッチ30の係合制御が必要である。これらの制御等のため、変速機入力軸21(ドライブプーリ22)の回転を検出する第1回転センサ41、変速機出力軸27(ドリブンプーリ25)の回転を検出する第2回転センサ42およびファイナルドリブンギヤ33の回転(すなわち車速)を検出する第3回転センサ43が設けられている。
【0022】
これらの制御は、第1油圧ポンプ3もしくは第2油圧ポンプ56から供給される油圧を用いて行われる。この制御を行う油圧制御装置の構成を、図2〜図4の油圧回路図および図5の油圧回路模式図を参照して以下に説明する。なお、これらの図において○囲みアルファベットA〜Iで示す油路が互いに繋がる。
【0023】
この油圧制御装置は、変速機ハウジング等により形成されるオイルタンク60内の作動油を吐出供給する第1油圧ポンプ3および第2油圧ポンプ56を有する。前述のように第1油圧ポンプ3はエンジンEにより駆動され、第2油圧ポンプ56はポンプ駆動用電気モータ55により駆動される。なお、ポンプ駆動用電気モータ55により駆動される第2油圧ポンプ56の吐出油路には、リリーフバルブ57とワンウェイバルブ58とが設けられている。両油圧ポンプ3,56の吐出油は高圧レギュレータバルブ61により調圧されて高圧制御油圧が作られ、これがシフトバルブ65および低圧レギュレータバルブ64に供給される。また、低圧レギュレータバルブ64により調圧されて作られた低圧制御油圧もシフトバルブ65に供給される。
【0024】
高圧レギュレータバルブ61は高圧コントロールバルブ62からの背圧に応じて高圧制御油圧を作り出し、高圧コントロールバルブ62および低圧レギュレータバルブ64は高低圧コントロールバルブ63からの制御油圧により作動制御される。高低圧コントロールバルブ63はリニアソレノイド63aにより制御電流に応じて任意の制御油圧を作り出すものであり、このことから分かるように、高低圧コントロールバルブ63のリニアソレノイド63aに対する信号電流制御により高圧制御油圧および低圧制御油圧が設定される。
【0025】
シフトバルブ65は上記のようにして供給された高圧制御油圧および低圧制御油圧をドライブおよびドリブン側油圧シリンダ23,26に振り分け供給してドライブおよびドリブンプーリ22,25のプーリ幅調整を行って変速制御を行う。このシフトバルブ65の作動はリニアソレノイド66aにより作動されるシフトコントロールバルブ66からのシフトコントロール制御油により制御される。すなわち、リニアソレノイド66aに対する信号電流制御を行うことにより、シフトバルブ65の作動を制御して変速制御を行うことができる。
【0026】
高圧コントロールバルブ61により作られた高圧制御油圧は油路101からクラッチリデューシングバルブ72に供給されてライン圧が作られ、このライン圧が油路102に供給される。なお、高圧レギュレータバルブ61、高圧コントロールバルブ62およびクラッチリデューシングバルブ72から排出される余剰油は潤滑バルブ71により調圧されて潤滑部LUBEに供給される。油路102のライン圧は油路103から高低圧コントロールバルブ63およびシフトコントロールバルブ66に供給され、さらに、油路104から後述する発進クラッチコントロールバルブ75に供給される。
【0027】
油路102のライン圧は油路105を介して高圧コントロールソレノイドバルブ82に供給されるとともに油路105aを介して高圧コントロールバルブ62に供給されている。このため、高圧コントロールソレノイドバルブ82により高圧コントロールバルブ62に対するライン圧の供給切換制御を行って、高圧制御油圧を二段階に切換設定可能となっている。
【0028】
油路102のライン圧はさらに、油路106から前後進クラッチコントロールバルブ73を通って油路107に供給され、さらにマニュアルバルブ74を介して前進クラッチ14および後進ブレーキ15に選択供給されるようになっている。前後進クラッチコントロールバルブ73は右端に油路108aからライン圧を受けたときに図示のようにスプールが左動されて油路106と油路107とを連通させ、ライン圧が無くなったときにスプールが右動されて油路106に対して油路107を遮断させるとともに油路107をドレンに連通させる。なお、油路108aへのライン圧の作用は、油路102から油路108を介して繋がる前後進クラッチコントロールソレノイドバルブ81により制御される。
【0029】
マニュアルバルブ74は、運転席のシフトレバー操作に応じて切換作動され、P,Nレンジにおいては油路107を閉塞するとともに前進クラッチ14および後進ブレーキ15をともにドレンに連通させて、前進クラッチ14および後進ブレーキ15を解放させる。Rレンジにおいては油路107と後進ブレーキ15を連通させてライン圧を後進ブレーキ15に供給させ、これを係合させる。また、前進側のレンジ、すなわち、D,S,Lレンジにおいては油路107と前進クラッチ14を連通させてライン圧を前進クラッチに供給させ、これを係合させる。但し、前後進クラッチコントロールバルブ73の右端に油路108aからライン圧を受けて油路106と油路107とが連通した状態の場合には上記のように前進クラッチ14もしくは後進ブレーキ15の係合作動が可能であるが、油路108aへのライン圧が作用しないときには油路107は前後進クラッチコントロールバルブ73によりドレンに連通し、前進クラッチ14および後進ブレーキ15はマニュアルバルブ74の作動位置の如何に拘わらず解放される。
【0030】
前述のように油路104を介してライン圧が供給される発進クラッチコントロールバルブ75はリニアソレノイド75aにより作動が制御され、発進クラッチ制御油圧をシフトインヒビターバルブ77を介して発進クラッチ30に供給し、発進クラッチ30の係合制御が行われる。なお、シフトインヒビターバルブ77の右端部は油路110を介してシフトコントロールバルブ66に繋がる。例えば、装置の異常が発生したときや、駆動電力供給がなくなったときに、シフトコントロールバルブ66のリニアソレノイド66aの通電電流が零となり油路110に供給されるシフト制御油圧が最大とされる。
【0031】
この最大制御油圧が油路110を介してシフトインヒビターバルブ77に供給されると、そのスプールが左動されて発進クラッチコントロールバルブ75からの制御油圧供給が遮断され、これに代えてピトー制御バルブ78からピトー圧が発進クラッチ30に供給される。すなわち、この場合にはピトー圧により発進クラッチ30の係合制御が行われる。なお、この最大制御油圧はシフトバルブ65にも供給され、そのスプールを右動させて低圧制御油圧をドリブン側油圧シリンダ26に供給させるとともに高圧制御油圧をドライブ側油圧シリンダ23に供給させ、変速比をTOPにする。
【0032】
次に、以上のように構成されたハイブリッド車両の動力伝達装置における各制御について説明する。この動力伝達装置においては、基本的には、エンジンEの駆動力を前後進切換機構10および無段変速機構20を介して変速するとともに、発進クラッチ30からファイナルドライブおよびドリブンギヤ32,33、ディファレンシャル機構34、アクスルシャフト35等を介して車輪に伝達して走行駆動を行わせる。但し、発進時には第1モータジェネレータ1により駆動アシストを行うとともに減速時には第1モータジェネレータ1を発電機として作用させてエネルギー回生(バッテリ51の充電)を行う。
【0033】
さらに、車両が停止している時や、車両が比較的高速で走行している状態においては、エンジンEを一時的に停止させる制御が行われ、燃費向上を図るようになっている。ここで、車両走行中にエンジンを一時停止させるときには、第2モータジェネレータ50を駆動させて車輪36を駆動させて走行を継続する制御が行われる。このとき、前進クラッチ14および後進ブレーキ15をともに解放させて前後進切換機構10よりエンジン側における引きずりトルクの発生を防止する。一方、発進クラッチ30については無段変速機構20を無負荷回転駆動させるに必要なだけのトルク伝達を行わせる弱い係合状態となし、このように無負荷回転駆動する無段変速機構20におけるドライブおよびドリブン側油圧シリンダ23,26に対する油圧供給制御を行って無段変速機構20の変速比をそのときの運転状態に対応する値に設定する制御を行う。
【0034】
以上のような走行駆動制御内容の詳細について、以下に図6〜図18を参照して説明する。まず、図6にはエンジンの運転を継続するか、一時停止するかを判断するエンジン運転処理制御フローS10を示している。この制御においては、ステップS11においてイグニッションスイッチがオンか否かを判断し、これがオフのときにはエンジンを停止させる(ステップS22)。イグニッションスイッチがオンのときにはステップS12,S13に進み、ドライバーが要求する要求駆動力FRQを演算するとともに、そのときに第2モータジェネレータ50が出力可能な最大駆動力である最大モータ駆動力FEVを演算する。
【0035】
要求駆動力FRQの演算に際しては、まず、走行レバーが走行レンジにあるか否かを判断し、走行レンジ以外であれば要求駆動力FRQ=0に設定する。一方、走行レンジにあるときには、車速Vとアクセル開度AP(%)に応じて要求駆動力FRQを求める。このため、図7に示すように、車速Vとアクセル開度AP(%)に応じて要求駆動力FRQが予め求められて設定されており、そのときにおける実際の車速Vとアクセル開度AP(アクセルペダル踏み込み量)に対応する要求駆動力FRQを図7から読みとって設定する。なお、図7から分かるように、要求駆動力FRQは、車速Vが大きくなるほど小さく、アクセル開度APが大きくなるほど大きい。この図において、アクセル開度AP=100%とはアクセル全開(WOT)の状態を意味し、アクセル開度AP=0%とはアクセル全閉の状態を意味する。
【0036】
また、最大モータ駆動力FEVは、バッテリ51の残容量SOCと車速Vから求められる。このため、図8に示すように、車速Vとバッテリ残容量SOCに応じて最大モータ駆動力FEVが予め求められて設定されており、そのときにおける実際の車速Vとバッテリ残容量SOCに対応する最大モータ駆動力FEVを図8から読みとって設定する。なお、図8から分かるように、最大モータ駆動力FEVは車速Vが大きくなるほど小さく、バッテリ残容量SOCが大きいほど大きい。
【0037】
次に、ステップS14においてこのようにして演算された要求駆動力FRQと最大モータ駆動力FEVとを比較し、FEV<FRQのときにはエンジン運転制御を選択し、エンジン運転時処理制御を行う(ステップS18,S19)。すなわち、要求駆動力FRQが最大モータ駆動力FEVより大きいときには第2モータジェネレータ50によっては十分な駆動が行えないため、エンジンEによる駆動を行わせる。
【0038】
逆に、FEV≧FRQのときには第2モータジェネレータ50による駆動走行が可能であるため、ステップS15においてエンジンを一時停止することが可能か否かを判断する。さらに、ステップS16においてエンジン一時停止を許可している状態からこれを解除すべきか否か、すなわち、エンジンを再始動すべきか否かを判断する。エンジン一時停止が許可されない場合もしくはエンジン一時停止許可が解除された場合には、ステップS17からステップS18,S19に進み、上述のようにエンジン運転時処理制御を行う。一方、エンジン一時停止が可能である場合には、ステップS20,S21に進み、エンジンを停止させるとともにエンジン停止時処理を行う。
【0039】
以上の制御フローにおいて、ステップS19におけるエンジン運転時処理制御は、従来から行われている制御であり、例えば前進レンジでは、前進クラッチ14を係合させるとともに発進クラッチ30の係合制御を行って車両を発進させ、発進後は運転状態に応じて無段変速機構20による変速制御を行って、車両を走行させる制御がなされる。この制御は、従来から一般的に行われている制御であるため、ここではその内容説明は省略する。
【0040】
以下において、エンジンを一時停止させる制御について説明するが、まず、上記エンジン運転処理フローS10におけるエンジン停止許可判断制御S15について、図9を参照して説明する。この制御フローでは、まず、バッテリ残容量SOCが所定値以上か否かが判断され、バッテリ残容量SOCが所定値未満すなわち残容量が少ないときにはステップS35に進みエンジン停止制御を行わせない。エンジンを停止した場合、再始動のための電力と、エンジン停止中に補機類を駆動するための電力が最低限必要であり、上記所定値はこのような電力の余裕があるか否かを判断するための値である。この値は想定するエンジン停止時間に応じて変化するが、例えば、約100Wh程度に設定される。一方、残容量が所定以上であるときには、ステップS32に進み、ブレーキ負圧(すなわち、図1に示すバキュームタンク6内の負圧)が所定値以下か否かを判断する。
【0041】
ステップS32において、ブレーキ負圧が所定値を越えると判断されたとき(すなわち、ブレーキ負圧が不足すると判断されたとき)にはブレーキブースタ7により十分な倍力作用が得られず安全な制動が行えないおそれがあるため、ステップS35に進み、エンジン停止制御を行わせずにエンジン運転を継続してブレーキ負圧を蓄積させる。なお、この所定値は、バキュームタンク6の容量に応じて変化するが、例えば、250mmHg程度に設定される。ブレーキ負圧が所定値以下であり、ブレーキブースタ7により十分な倍力作用が得られる場合にはステップS33に進み、エンジンの暖機運転が完了したか否かを判断する。
【0042】
そして、暖機運転が未了のときにはまずエンジンの暖機を完了させることを優先し、ステップS35に進んでエンジン停止制御を行わせず、エンジン運転を継続させる。一方、暖機運転が完了のときにはステップS34に進みエンジン停止を許可する。このように、バッテリ残容量が十分あり、ブレーキ負圧も十分蓄えられており、暖機運転が完了している場合にのみエンジン停止を許可する。
【0043】
次に、上記エンジン運転処理フローS10におけるエンジン停止許可解除判断処理制御S16について、図10を参照して説明する。この制御フローでは、まず、ステップS90においてエンジン停止許可が出されているか否かを判断し、停止許可がでていない場合にはこれを解除する処理は不要であり、今回のフローをそのまま終了する。エンジン停止許可が出されている場合にはステップS91,S92に進んで、車速Vを検出するとともに加速度dV/dtを算出する。そして、このように算出された加速度dV/dtが負の値か否か、すなわち、車両が減速状態であるか否かが判断され(ステップS93)、これが正もしくは零のとき(加速もしくは定速走行状態のとき)には変速比の急激な変化は起こり得ないため、エンジン停止許可が出されていてもこれを解除する処理は不要であり、今回のフローをこのまま終了する。
【0044】
一方、加速度dV/dtが負の値、すなわち、減速状態であると判断されたときには、ステップS94に進み車速Vが所定車速V0より大きいか否かが判断される。この所定車速V0は、この所定車速V0で走行したときに第2回転センサ42によるドリブンプーリ25の回転検出が可能な最小の速度であり、具体的には約5km/hである。車速Vが所定車速V0以下になるとドリブンプーリ25の回転が小さすぎて速やかな変速制御が不可能となるので、V≦V0の場合にはこのまま今回のフローを終了する。
【0045】
一方、V>V0の場合には、ステップS95において、要求減速時間Tvを演算する。この要求減速時間Tvは現在の減速度(負の加速度)のままで車速Vを所定車速V0まで減速させるのに要求される時間であり、Tv=(V0−V)/(dV/dt)により演算される。
【0046】
次に、ステップS96に進み、ポンプ駆動用電気モータ55により駆動される第2油圧ポンプ56から得られる油圧を用いて達成可能な最大変速速度で、現在の変速比RAから所定変速比ROまで変速を行わせるために必要な最大減速時間Trを検索する。ここで所定変速比ROは車両停止状態から発進するときに十分な駆動力を発揮できる最低の(LOW側の)変速比であり、無段変速機構20の最大変速比(LOW)の約90%以上の変速比が設定される。すなわち、LOW変速比に近い変速比が所定変速比ROとして設定される。このことから分かるように、現在の変速比RAから十分な発進駆動力が発揮できる変速比ROまで、第2油圧ポンプ56からの油圧により達成可能な最短変速時間が最大減速時間Trである。この最大減速時間Trは、図11に示すように、変速機油温toと現在の変速比RAとに対応して実験的に予め求められて設定されており、このグラフから検索して求められる。
【0047】
次に、上記のように求められた要求減速時間Tvと最大減速時間Trとを比較し(ステップS97)、Tv≧Trのときにはそのままエンジン停止許可制御を維持し、Tv<Trのときにはエンジン停止許可を解除する、すなわち、エンジンを再始動させる(ステップS98)。このことから分かるように、要求減速時間Tvは、特許請求の範囲に定義する「運転状態に応じて要求される要求変速速度」に対応する値であり、最大減速時間は、「第2油圧ポンプから供給される油圧により得られる最大変速速度」に対応する値である。
【0048】
この制御について、図12を参照して具体的に説明する。まず、図12(A)には、現在の変速比RAで走行中に、第2油圧ポンプ56からの油圧により達成可能な最大変速速度でLOW側に変速した場合の変速比の時間変化を示しており、縦軸が変速比RATIOを示し横軸が時間tを示す。この図から分かるように、このときの変速時間が最大減速時間Trである。図12(B)および(C)には、ブレーキ作動等がなされて減速されるときにおける、減速度dV/dtと、この減速度で所定車速V0まで減速するために要求される要求減速時間Tvとの関係を示している。
【0049】
図12(B)は減速度dV/dtが比較的小さい場合を示し、図12(C)は減速度dV/dtが大きい場合を示す。図12(B)の減速の場合には、比較的緩やかな減速であるため最大減速時間Trより要求減速時間Tvが長く、変速比が所定変速比ROまで変速された時点においてはまだ車両は走行中である。この場合には、車両が走行中で変速制御が可能な間に変速比が所定変速比ROまで変速するため、エンジン停止許可状態のまま停車させても次の発進に必要な所定変速比ROが得られており、エンジン停止許可を保持させる。
【0050】
一方、図12(C)の減速の場合には、最大減速時間Trより要求減速時間Tvが短く、変速比が所定変速比ROまで変速された時点において既に車両は停止している。この場合には、車両が停止して変速制御が不可能となった時点でも変速比はまで所定変速比ROまで変速されていないため、エンジン停止許可を解除する制御を行う。これにより、変速比RAの状態で減速が開始されたときにエンジンが再始動され、第1油圧ポンプ3が駆動されて、その吐出油圧を用いて急速な変速制御がなされ、車両が停止する前に次の発進に必要な所定変速比ROが得られる。このことから分かるように、エンジンにより駆動される第1油圧ポンプ3の容量を十分大きなものにしておけば、ポンプ駆動用電気モータ55により駆動される第2油圧ポンプ56を小型コンパクトなものとしても、問題のない変速制御が可能である。
【0051】
上記のようにしてエンジン停止が許可されたときに行われるエンジン停止時処理制御(ステップS20)の内容について図13を参照して説明する。この制御においては、まず、インヒビタソレノイドバルブすなわちクラッチコントロールソレノイドバルブ81(図3参照)を駆動させる(ステップS41)。クラッチコントロールソレノイドバルブ81はノーマルクローズタイプのソレノイドバルブであり、これを駆動することにより油路108,108aをドレンに連通させて前後進クラッチコントロールバルブ73の右端への作動油圧を零にする。この結果、前述したように、油路107がドレンに連通し、マニュアルバルブ74を介して行われていた前進クラッチ14もしくは後進ブレーキ15へのライン圧が遮断され、前進クラッチ14および後進ブレーキ15がともに解放された状態となる。
【0052】
これにより、エンジン出力軸Esと変速機入力軸21とが前後進切換機構10において切り離され、変速機入力軸21よりエンジン側に変速機側の回転が伝達されることがなくなり、エンジン側における引きずりトルクの発生が阻止される。すなわち、エンジンEを一時停止して第2モータジェネレータ50により車輪36を駆動して走行するときに、その回転は前後進切換機構10において切り離されてエンジン側に伝達されないため、エンジンEと前後進切換機構10の間の回転部材による引きずりトルクが発生せず、第2モータジェネレータ50の駆動力が効率よく車輪36に伝達される。このため、バッテリ51の駆動電力を無駄にすることがなく、且つ減速時等に車輪36からの駆動により第2モータジェネレータ50が駆動されるときに効率のよいエネルギー回生を行うことができる。
【0053】
次に、エンジンを一時停止している間における目標変速比RTを演算する(ステップS42)。目標変速比比RTは、図14に示すように、車速Vとアクセル開度(アクセルペダル踏み込み量)APに応じて決められ、車速Vが大きくなるほど小さくなり、アクセル開度が大きくなるほど大きくなる値に設定される。具体的には、ドライバーがアクセルペダルを徐々に踏み込むことにより要求駆動力が高まってエンジンが再始動される場合には、エンジンを再始動する直前の目標変速比が、エンジンを再始動して発進クラッチ30を締結したときにエンジンEの回転が略2000rpmとなるように設定される。一方、アクセルペダルの踏み込み量が比較的小さく、要求駆動力も大きくない場合には、エンジンを再始動して発進クラッチ30を締結したときにエンジンEの回転が略1200〜1500rpmとなるように設定される。
【0054】
このようにしてステップS42において目標変速比が演算されると、この目標変速比に基づいて第2油圧ポンプ(電動オイルポンプ)56を駆動する必要があるか否かを判断する(ステップS43)。この判断制御内容を図15に示しており、ここではまずタイマーが終了しているか否かを判断する(ステップS51)。なお、初期状態ではタイマーが終了状態となっている。タイマーが終了している場合には、ステップS52に進み、実変速比RA(=NDR/NDN)を計算する。但し、NDRは第1回転センサ41により検出されるドライブプーリ22の回転数であり、NDNは第2回転センサ42により検出されるドリブンプーリ25の回転数である。
【0055】
次に、ステップS53に進み、変速比偏差RE(=RT−RA)を計算する。変速比偏差REの絶対値が所定値よりも大きい、すなわち変速比偏差REが大きい場合は変速制御が必要であるため、ポンプ駆動用電気モータ55により第2油圧ポンプ56を駆動する。このときステップS55においてタイマーがセットされ、一旦第2油圧ポンプ56が駆動されるとタイマーにより設定された時間の間これを継続して駆動する。このように、タイマーを用いることによりポンプ駆動用電気モータ55のオン・オフの頻度を少なくし、オン・オフ制御を行うスイッチ素子(リレー)の耐久性を向上させている。一方、変速比偏差REの絶対値が所定値よりも小さいときには変速の必要がなく、第2油圧ポンプ56の駆動は停止される(ステップS57)。
【0056】
以上のようにステップS43において電動オイルポンプすなわち第2油圧ポンプ56の駆動判断がなされ、これを駆動するときにはステップS44からステップS45に進み、発進クラッチ処理制御を行う。この制御内容を図16に示しており、この制御においてはまず変速機油温toを検出する(ステップS61)。次に、発進クラッチ係合トルクTcを演算し、この係合トルクTcを得るために発進クラッチ30に供給する油圧を設定する指令信号を出力して、発進クラッチコントロールバルブ75の作動を制御する。なお、発進クラッチ係合トルクTcは、変速機油温toと車速Vとに応じて、図17に示すように設定される。エンジンを停止した状態で走行しているときには、このときの走行状態(運転状態)に応じた変速比が得られるように無段変速機構20を無負荷回転させる必要がある。発進クラッチ係合トルクTcはこのように無段変速機構20を無負荷回転させるために必要な駆動力を伝達させるため要求されるトルク値であり、油温toが低いほど大きく、車速Vが大きいほど大きくなるトルクTcが図17に示すように設定される。
【0057】
次に、ステップS45からステップS46に進み、プーリ変速処理すなわち無段変速機構20における変速処理制御を行う。この制御内容を図18に示しており、この制御においてはまず、変速比偏差REが正か負かを判断する(ステップS71)。変速比偏差REが負で実変速比RAが目標変速比RTより大きい場合には、変速比を小さく(OD(オーバードライブ)側に)する必要があり、逆に、変速比偏差REが正で実変速比RAが目標変速比RTより小さい場合には、変速比を大きく(LOW側に)する必要がある。
【0058】
このため、変速比偏差REが負の場合にはステップS72に進み、変速比偏差REと、負の値でありその絶対値が比較的小さい第1の所定値とを比較する。変速比偏差REが第1の所定値より大きい場合(零に近い)には変速の必要がないと判断して前回の変速指令値をホールドする(ステップS76)。変速比偏差REが第1の所定値より小さい場合(絶対値がより大きな負の値である場合)にはステップS73に進み、負の値でありその絶対値が比較的大きな第2の所定値と変速比偏差REとを比較する。変速比偏差REが第2の所定値より大きい場合(零に近い)には緩やかなOD側への変速が必要と判断し、変速指令値としてOD側緩変速指令値を設定する(ステップS75)。一方、変速比偏差REが第2の所定値より小さい場合(絶対値がより大きな負の値である場合)には急速なOD側への変速が必要と判断し、変速指令値としてOD側急変速指令値を設定する(ステップS74)。
【0059】
一方、ステップS71において変速比偏差が正の値であると判断された場合には、ステップS77に進み、変速比偏差REと、正の値でありその絶対値が比較的小さい第3の所定値とを比較する。変速比偏差REが第3の所定値より小さい場合(零に近い)には変速の必要がないと判断して前回の変速指令値をホールドする(ステップS79)。変速比偏差REが第3の所定値より大きい場合にはステップS78に進み、正の値でありその絶対値が比較的大きな第4の所定値と変速比偏差REとを比較する。変速比偏差REが第4の所定値より小さい場合には緩やかなLOW側への変速が必要と判断し、変速指令値としてLOW側緩変速指令値を設定する(ステップS80)。一方、変速比偏差REが第4の所定値より大きい場合には急速なLOW側への変速が必要と判断し、変速指令値としてLOW側急変速指令値を設定する(ステップS81)。
【0060】
このようにして設定された変速指令値に基づいてシフトコントロールバルブ66の作動が制御され、シフトバルブ65によるドライブおよびドリブン側油圧シリンダ23,26への高圧および低圧制御油圧の供給制御がなされて変速指令値に対応する変速制御が行われる。
【0061】
以上、エンジン一時停止を行うときの各種制御内容を説明したが、この制御は特に、エンジン一時停止時に、前後進切換機構10における前進クラッチ14および後進ブレーキ15を解放してエンジン側との連結を切り離すことと、ポンプ駆動用電気モータ55による第2油圧ポンプ56の駆動を変速比偏差が大きくなったときに限定することと、変速比偏差が大きくなったときには発進クラッチ30を弱係合させて無段変速機構20を無負荷回転駆動させるとともにそのときの運転状態に対応する目標変速比が得られるような変速制御を行うこととを特徴とする。
【0062】
これにより、エンジンを一時停止させて第2モータジェネレータ50による走行駆動を行うときに、前後進切換機構10よりエンジン側における回転引きずりトルクの発生がなくなり、第2モータジェネレータ50の駆動効率や、これが車輪から駆動されて発電機として作用するときのエネルギー再生効率が向上する。また、第2モータジェネレータ50による駆動中においては無段変速機構の変速制御は不要であるが、この間も運転状態に対応した変速比が得られるように変速制御を行うため、エンジンを再始動したときにエンジン回転が吹きあがることなくスムーズにエンジン駆動制御に移行させることができる。また、このような無段変速機構20の変速制御に際して、無段変速機構20は無負荷運転状態で変速制御を行うだけであるため変速用油圧は低圧でよく、変速制御エネルギーが小さくて良いという利点がある。同様に、発進クラッチ30は無段変速機構20を無負荷回転させるに必要な小さなトルクを伝達させるだけの弱係合を行わせるだけでよく、発進クラッチ30の係合制御エネルギーも小さくて良い。
【0063】
なお、以上においては、金属Vベルト式無段変速機構を用いた動力伝達装置を例にして説明したが、無段変速機構はこのようなタイプのものに限られるものではない。また、エンジン一時停止に際して、前後進切換機構によりエンジン側と無段変速機構側とを切り離すように構成している(すなわち、特許請求の範囲の係脱制御手段を前後進切換機構の前進クラッチおよび後進ブレーキにより構成している)が、無段変速機構の入力軸上に別のクラッチを配設して、このクラッチにより特許請求の範囲の係脱制御手段を構成し、エンジン一時停止時にこのクラッチを解放させるように構成しても良い。
【0064】
【発明の効果】
以上説明したように、本発明によれば、所定の運転状態においてエンジンが停止されて走行中においては、ポンプ駆動用電気モータによって第2油圧ポンプを駆動して第2油圧ポンプから得られた油圧を用いて無段変速機の変速比をそのときの運転状態に応じた値となるように変速制御を行い、さらに、第2ポンプから得られた油圧による変速制御では対応できない大きな変速要求が生じたときにはエンジンを始動して第1油圧ポンプを駆動し、この第1油圧ポンプから得られた油圧を変速制御に用いるように制御装置が構成されているため、エンジンを一時停止して走行中に急ブレーキ作動等により急速な変速要求が生じたときには、エンジンが再始動されて第1油圧ポンプからの油圧も変速制御に用いられ、第2油圧ポンプを小型化しても急速な変速要求に対応可能である。これにより、第2油圧ポンプを小型・軽量化できるだけでなく、第2油圧ポンプを駆動する電気モータも小型化できるとともにその消費電力を抑えることができる。
【0065】
なお、運転状態に応じて要求される要求変速速度と第2油圧ポンプから供給される油圧により得られる最大変速速度とを比較する判別手段を設け、この判別手段により要求変速速度が最大変速速度より大きいと判断されたときにエンジンを始動して第1油圧ポンプを駆動させるように構成しても良い。
【図面の簡単な説明】
【図1】本発明に係るハイブリッド車両の動力伝達装置構成を示す概略図である。
【図2】上記動力伝達装置における作動制御を行う装置構成を示す油圧回路図である。
【図3】上記動力伝達装置における作動制御を行う装置構成を示す油圧回路図である。
【図4】上記動力伝達装置における作動制御を行う装置構成を示す油圧回路図である。
【図5】上記動力伝達装置における作動制御を行う装置構成を示す油圧回路模式図である。
【図6】上記動力伝達装置における走行駆動制御内容を示すフローチャートである。
【図7】上記走行駆動制御に用いられる要求駆動力FRQと車速Vおよびアクセル開度APの関係を示すグラフである。
【図8】上記走行駆動制御における最大モータ駆動力FEVと車速Vおよびバッテリ残容量SOCの関係を示すグラフである。
【図9】図6の制御におけるエンジン停止許可判断制御の内容を示すフローチャートである。
【図10】図6の制御におけるエンジン停止許可解除判断処理制御の内容を示すフローチャートである。
【図11】上記エンジン停止許可解除判断処理制御における現在の変速比RAと変速機油温toと、最大減速時間Trとの関係を示すグラフである。
【図12】減速走行により変速比をRAからROまで変速させるときにおける要求減速時間Tvと最大減速時間Trとの関係を示すグラフである。
【図13】図6の制御におけるエンジン停止時処理制御の内容を示すフローチャートである。
【図14】図13の制御において演算される目標変速比RTと車速Vおよびアクセル開度APとの関係を示すグラフである。
【図15】図13の制御における電動オイルポンプ駆動判断制御の内容を示すフローチャートである。
【図16】図13の制御における発進クラッチ処理制御の内容を示すフローチャートである。
【図17】図16の制御において演算される発進クラッチトルクTcと車速Vおよび変速機油温toとの関係を示すグラフである。
【図18】図13の制御におけるプーリ変速処理制御の内容を示すフローチャートである。
【符号の説明】
E エンジン
3 第1油圧ポンプ
20 金属Vベルト式無段変速機構
31 アイドラシャフト(駆動力伝達系)
32 ファイナルドライアブギヤ(駆動力伝達系)
33 ファイナルドリブンギヤ(駆動力伝達系)
34 ディファレンシャル機構(駆動力伝達系)
35 アクスルシャフト(駆動力伝達系)
50 第2モータジェネレータ(電気駆動モータ)
55 ポンプ駆動用電気モータ
56 第2油圧ポンプ
Claims (2)
- 所定の運転状態において一時的に停止制御可能なエンジンと、前記エンジンの出力軸に繋がれてその出力回転を無段階に変速する無段変速機と、前記無段変速機の出力を駆動輪に伝達する駆動力伝達系と、前記エンジンと並列に配設されて前記駆動輪を駆動可能な電気駆動モータとを備えたハイブリッド車両の制御装置であって、
前記エンジンによって駆動される第1油圧ポンプと、
ポンプ駆動用電気モータによって駆動される第2油圧ポンプとを有し、
前記所定の運転状態において前記エンジンが停止されて走行中においては、
前記ポンプ駆動用電気モータによって前記第2油圧ポンプを駆動して前記第2油圧ポンプから得られた油圧を用いて前記無段変速機の変速比をそのときの運転状態に応じた値となるように変速制御を行うとともに、
前記第2ポンプから得られた油圧による変速制御では対応できない大きな変速要求が生じたときには前記エンジンを始動して前記第1油圧ポンプを駆動し、前記第1油圧ポンプから得られた油圧を変速制御に用いることを特徴とするハイブリッド車両の制御装置。 - 運転状態に応じて要求される要求変速速度と、前記第2油圧ポンプから供給される油圧により得られる最大変速速度とを比較する判別手段を備え、前記判別手段により前記要求変速速度が前記最大変速速度より大きいと判断されたときに前記エンジンを始動して前記第1油圧ポンプを駆動させることを特徴とする請求項1に記載のハイブリッド車両の制御装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000014406A JP3550068B2 (ja) | 2000-01-24 | 2000-01-24 | ハイブリッド車両の制御装置 |
| EP01100392A EP1116620B1 (en) | 2000-01-17 | 2001-01-05 | Hybrid vehicle control device |
| EP01100391A EP1116619B1 (en) | 2000-01-17 | 2001-01-05 | Hybrid vehicle including a control device |
| DE60136987T DE60136987D1 (de) | 2000-01-17 | 2001-01-05 | Hybridfahrzeug mit einer Steuerungsvorrichtung |
| DE60121067T DE60121067T2 (de) | 2000-01-17 | 2001-01-05 | Steuerungsvorrichtung eines Hybridfahrzeugs |
| US09/754,252 US6638022B2 (en) | 2000-01-17 | 2001-01-05 | Hybrid vehicle control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000014406A JP3550068B2 (ja) | 2000-01-24 | 2000-01-24 | ハイブリッド車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2001208177A JP2001208177A (ja) | 2001-08-03 |
| JP3550068B2 true JP3550068B2 (ja) | 2004-08-04 |
Family
ID=18541864
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000014406A Expired - Fee Related JP3550068B2 (ja) | 2000-01-17 | 2000-01-24 | ハイブリッド車両の制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3550068B2 (ja) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3826703B2 (ja) * | 2000-10-27 | 2006-09-27 | トヨタ自動車株式会社 | 車両用油圧ポンプの駆動制御装置 |
| JP3574121B2 (ja) | 2002-08-07 | 2004-10-06 | 本田技研工業株式会社 | ハイブリッド車両のエンジン停止始動制御装置 |
| US6730000B1 (en) * | 2002-12-09 | 2004-05-04 | Daimlerchrysler Corporation | Interactive process during engine idle stop mode |
| EP1493604B1 (en) | 2003-07-04 | 2013-09-18 | Honda Motor Co., Ltd. | Control apparatus for hybrid vehicle |
| JP3701660B2 (ja) | 2003-07-04 | 2005-10-05 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP3746775B2 (ja) | 2003-07-04 | 2006-02-15 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| JP4249147B2 (ja) | 2005-02-18 | 2009-04-02 | 本田技研工業株式会社 | ハイブリッド車両の電動オイルポンプ制御装置 |
| JP4259491B2 (ja) * | 2005-06-01 | 2009-04-30 | トヨタ自動車株式会社 | 動力出力装置およびこれを搭載する車両並びに動力出力装置の制御方法 |
| JP4530999B2 (ja) * | 2006-02-23 | 2010-08-25 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| KR100774664B1 (ko) | 2006-10-13 | 2007-11-08 | 현대자동차주식회사 | 하이브리드 차량의 파워트레인 |
| JP2008002687A (ja) * | 2007-09-25 | 2008-01-10 | Fujitsu Ten Ltd | 無段変速機制御装置 |
| JP5163438B2 (ja) * | 2008-11-14 | 2013-03-13 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP2011208689A (ja) * | 2010-03-29 | 2011-10-20 | Toyota Motor Corp | 変速機の制御装置 |
| JP5896730B2 (ja) * | 2011-12-27 | 2016-03-30 | 富士重工業株式会社 | ハイブリッド車両の制御装置 |
| JP5842990B2 (ja) * | 2012-02-29 | 2016-01-13 | トヨタ自動車株式会社 | 車両の制御装置 |
| CN104736406B (zh) * | 2012-11-01 | 2017-05-03 | 日产自动车株式会社 | 混合动力车辆的模式切换控制装置 |
| JP6386701B2 (ja) * | 2013-05-30 | 2018-09-05 | 株式会社Subaru | 車両用制御装置 |
| JP5980435B2 (ja) * | 2013-09-13 | 2016-08-31 | ジヤトコ株式会社 | ハイブリッド車の制御装置 |
| JP6569095B2 (ja) * | 2014-01-30 | 2019-09-04 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6063896B2 (ja) * | 2014-04-23 | 2017-01-18 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
| MX2019002487A (es) * | 2016-09-02 | 2019-07-01 | Stackpole Int Engineered Products Ltd | Sistema de bomba de entrada dual. |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4134268C2 (de) * | 1990-10-29 | 2001-05-17 | Volkswagen Ag | Antriebsanordnung für ein Kraftfahrzeug |
| JPH0638303A (ja) * | 1992-07-15 | 1994-02-10 | Aqueous Res:Kk | ハイブリッド型車両 |
| JP3221118B2 (ja) * | 1992-11-27 | 2001-10-22 | 株式会社エクォス・リサーチ | ハイブリット車輌における動力伝達装置 |
| JP3146709B2 (ja) * | 1992-12-14 | 2001-03-19 | 株式会社エクォス・リサーチ | 車輌における動力伝達装置 |
| JP3493887B2 (ja) * | 1996-04-23 | 2004-02-03 | トヨタ自動車株式会社 | ハイブリッド車両の油圧制御装置 |
| JP3629890B2 (ja) * | 1997-05-22 | 2005-03-16 | 日産自動車株式会社 | ハイブリッドシステム車両の発進装置 |
| JPH11107798A (ja) * | 1997-10-08 | 1999-04-20 | Aisin Aw Co Ltd | ハイブリッド駆動装置 |
| JP3624656B2 (ja) * | 1997-10-29 | 2005-03-02 | 日産自動車株式会社 | エンジン自動停止車両の油圧制御装置 |
| JP3642166B2 (ja) * | 1997-11-28 | 2005-04-27 | 日産自動車株式会社 | エンジン自動停止及び始動車両の油圧制御装置 |
| JPH11189073A (ja) * | 1997-12-25 | 1999-07-13 | Nissan Motor Co Ltd | ハイブリット車両の流体圧制御装置 |
| JPH11270668A (ja) * | 1998-03-20 | 1999-10-05 | Nissan Motor Co Ltd | ハイブリッド車両の駆動制御装置 |
| JP2000145946A (ja) * | 1998-11-09 | 2000-05-26 | Toyota Motor Corp | 車両の駆動系制御装置 |
| JP2000154753A (ja) * | 1998-11-19 | 2000-06-06 | Nissan Motor Co Ltd | エンジンの始動制御装置 |
| JP2000190749A (ja) * | 1998-12-28 | 2000-07-11 | Toyota Motor Corp | 車両用駆動装置 |
| JP4470234B2 (ja) * | 1999-05-10 | 2010-06-02 | トヨタ自動車株式会社 | 駆動制御装置 |
| JP3550067B2 (ja) * | 2000-01-17 | 2004-08-04 | 本田技研工業株式会社 | ハイブリッド車両の制御装置 |
-
2000
- 2000-01-24 JP JP2000014406A patent/JP3550068B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2001208177A (ja) | 2001-08-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3550067B2 (ja) | ハイブリッド車両の制御装置 | |
| JP3550068B2 (ja) | ハイブリッド車両の制御装置 | |
| EP1116619B1 (en) | Hybrid vehicle including a control device | |
| JP3912235B2 (ja) | 車両の油圧制御装置 | |
| JP3629890B2 (ja) | ハイブリッドシステム車両の発進装置 | |
| JP3835202B2 (ja) | 車両用駆動制御装置 | |
| JP3657902B2 (ja) | 車両用動力伝達装置 | |
| US6702716B2 (en) | Power transmission | |
| CN107406069B (zh) | 车辆用起步控制装置及起步控制方法 | |
| EP1336773A2 (en) | Vehicle control apparatus | |
| JP3584680B2 (ja) | 内燃機関と電動機の複合型車両駆動装置 | |
| JP2001027316A (ja) | 車両用動力伝達装置の停止制御装置 | |
| JP4207376B2 (ja) | 車両の油圧制御装置 | |
| US6709364B2 (en) | Vehicular power-transmission control system | |
| JP3343679B2 (ja) | 車両用動力伝達装置の制御装置 | |
| JP2002130449A (ja) | 車両の油圧制御装置 | |
| JP3564967B2 (ja) | ハイブリッドシステム車両の発進装置 | |
| JP3988789B2 (ja) | ハイブリット駆動装置における発進制御装置 | |
| US6702715B2 (en) | Power transmission | |
| JP3876503B2 (ja) | ハイブリット駆動装置における発進制御装置 | |
| JP4686898B2 (ja) | 車両用動力伝達装置 | |
| JP3849510B2 (ja) | 車両のエンジン制御装置 | |
| JP3705221B2 (ja) | 車両の制御装置 | |
| JP2002130144A (ja) | 車両の油圧制御装置 | |
| JPH0914297A (ja) | 車両用クラッチの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040420 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040422 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080430 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090430 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |