JP2019182425A - 自動運転車両の制御方法、自動運転車両の制御装置及びコンピュータ読み取り可能な記憶媒体 - Google Patents
自動運転車両の制御方法、自動運転車両の制御装置及びコンピュータ読み取り可能な記憶媒体 Download PDFInfo
- Publication number
- JP2019182425A JP2019182425A JP2019134761A JP2019134761A JP2019182425A JP 2019182425 A JP2019182425 A JP 2019182425A JP 2019134761 A JP2019134761 A JP 2019134761A JP 2019134761 A JP2019134761 A JP 2019134761A JP 2019182425 A JP2019182425 A JP 2019182425A
- Authority
- JP
- Japan
- Prior art keywords
- trouble
- driving vehicle
- control module
- autonomous driving
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/023—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for transmission of signals between vehicle parts or subsystems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
Abstract
Description
Claims (22)
- 主制御モジュールと、補助制御モジュールと、前記主制御モジュール及び前記補助制御モジュールに接続されるトラブル検出モジュールと、トラブルアラームモジュールとを含む自動運転車両の自動運転システムに用いられる自動運転車両の制御方法であって、
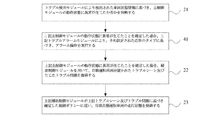
前記トラブル検出モジュールにより検出された車両状態情報に基づき、前記主制御モジュールの動作状態に異常が生じたか否かを判断することと、
前記主制御モジュールの動作状態に異常が生じたことを確定した場合、前記補助制御モジュールを用いて、前記自動運転車両が置かれたトラブルシーン及び生じたトラブル問題を取得することと、
前記補助制御モジュールが前記トラブルシーン及び前記トラブル問題に基づき確定した制御ポリシーに従い、前記自動運転車両の走行状態を制御することと、を含むことを特徴とする自動運転車両の制御方法。 - 前記主制御モジュールの動作状態に異常が生じたことを確定した後、且つ、前記補助制御モジュールを用いて、前記自動運転車両が置かれたトラブルシーン及び生じたトラブル問題を取得する前に、
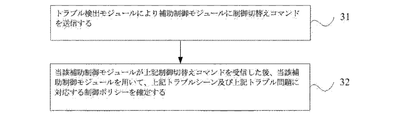
前記トラブル検出モジュールにより前記補助制御モジュールに、前記自動運転車両の動作を制御するシステムを前記主制御モジュールから前記補助制御モジュールに切り替えるように指示するために用いられる制御切替えコマンドを送信することをさらに含み、
対応するように、前記補助制御モジュールを用いて、前記自動運転車両が置かれたトラブルシーン及び生じたトラブル問題を取得した後に、
前記補助制御モジュールが前記制御切替えコマンドを受信した後、前記補助制御モジュールを用いて、前記トラブルシーン及び前記トラブル問題に対応する制御ポリシーを確定することをさらに含むことを特徴とする請求項1に記載の自動運転車両の制御方法。 - 前記自動運転システムには、異なるシーンにおける異なるトラブル問題に対応する制御ポリシーが記憶されており、前記制御ポリシーは前記自動運転車両のトラブルシーン履歴、トラブル問題履歴及び車内にいる者の乗り心地に基づき設定されることを特徴とする請求項1に記載の自動運転車両の制御方法。
- 前記トラブルシーンは、高速道路、市街地及び郊外を含み、
前記トラブル問題は、ブレーキが効かない、操舵のタイミングを誤る、信号無視及び減速制御不能を含むことを特徴とする請求項1〜3のいずれか1項に記載の自動運転車両の制御方法。 - 前記制御ポリシーは、安全制限速度、安全停車、路肩停車、非常制動、自動運転解除のうちの1種以上を含むことを特徴とする請求項4に記載の自動運転車両の制御方法。
- 前記補助制御モジュールが前記トラブルシーン及び前記トラブル問題に基づき確定した制御ポリシーに従い、前記自動運転車両の走行状態を制御することは、
前記自動運転車両が高速道路でブレーキが効かない問題が生じた場合、前記高速道路トラブルシーンにおけるブレーキが効かない問題に対応する第1の制御ポリシーを安全制限速度内における路肩停車に確定することと、
前記第1の制御ポリシーに基づき、前記補助制御モジュールを用いて、前記自動運転車両が安全制限速度内において路肩停車するよう制御することと、を含むことを特徴とする請求項5に記載の自動運転車両の制御方法。 - 前記補助制御モジュールが前記トラブルシーン及び前記トラブル問題に基づき確定した制御ポリシーに従い、前記自動運転車両の走行状態を制御することは、
前記自動運転車両が市街地で信号無視の問題が生じた場合、前記市街地トラブルシーンにおける前記信号無視の問題に対応する第2の制御ポリシーを非常制動に確定することと、
前記第2の制御ポリシーに基づき、前記補助制御モジュールを用いて、前記自動運転車両が非常制動するよう制御することと、を含むことを特徴とする請求項5に記載の自動運転車両の制御方法。 - 前記補助制御モジュールが前記トラブルシーン及び前記トラブル問題に基づき確定した制御ポリシーに従い、前記自動運転車両の走行状態を制御することは、
前記自動運転車両が郊外で操舵のタイミングを誤る問題が生じた場合、前記郊外トラブルシーンにおける前記操舵のタイミングを誤る問題に対応する第3の制御ポリシーを安全制限速度内における非常停車に確定することと、
前記第3の制御ポリシーに基づき、前記補助制御モジュールを用いて、前記自動運転車両が安全制限速度内において非常停車するよう制御することと、を含むことを特徴とする請求項5に記載の自動運転車両の制御方法。 - 前記主制御モジュールの動作状態に異常が生じたことを確定した場合、
前記トラブルアラームモジュールにより、予め設定された応答のタイプに基づきアラーム操作を実行することをさらに含むことを特徴とする請求項1に記載の自動運転車両の制御方法。 - 前記予め設定された応答のタイプは、視覚による注意喚起及び音による注意喚起を含み、
前記自動運転車両の外部にいる者に対して、前記視覚による注意喚起は、非常点滅表示を含み、前記音による注意喚起は、クラクションを含み、
前記自動運転車両の内部にいる者に対して、前記視覚による注意喚起は、前記自動運転車両内のヒューマンコンピュータインタラクション画面にトラブル表示灯を点灯することを含み、前記音による注意喚起は、音のタイプとその持続時間ごとに異なるトラブルタイプに対応する多くのタイプで持続時間が異なる音を含むことを特徴とする請求項9に記載の自動運転車両の制御方法。 - 主制御モジュールと、補助制御モジュールと、前記主制御モジュール及び前記補助制御モジュールに接続されるトラブル検出モジュールと、トラブルアラームモジュールとを含む自動運転車両の自動運転システムに用いられる自動運転車両の制御装置であって、
前記自動運転車両の制御装置は、判断モジュールと、取得モジュールと、制御モジュールとを含み、
前記判断モジュールは、前記トラブル検出モジュールにより検出された車両状態情報に基づき、前記主制御モジュールの動作状態に異常が生じたか否かを判断するために用いられ、
前記取得モジュールは、前記判断モジュールが前記主制御モジュールの動作状態に異常が生じたことを確定した場合、前記補助制御モジュールを用いて、前記自動運転車両が置かれたトラブルシーン及び生じたトラブル問題を取得するために用いられ、
前記制御モジュールは、前記補助制御モジュールが前記トラブルシーン及び前記トラブル問題に基づき確定した制御ポリシーに従い、前記自動運転車両の走行状態を制御するために用いられることを特徴とする自動運転車両の制御装置。 - 送信モジュールをさらに含み、
前記送信モジュールは、前記主制御モジュールの動作状態に異常が生じたことを確定した後、且つ、前記補助制御モジュールを用いて、前記自動運転車両が置かれたトラブルシーン及び生じたトラブル問題を取得する前に、前記トラブル検出モジュールにより前記補助制御モジュールに、前記自動運転車両の動作を制御するシステムを前記主制御モジュールから前記補助制御モジュールに切り替えるように指示するために用いられる制御切替えコマンドを送信するために用いられ、
対応するように、前記取得モジュールは、前記補助制御モジュールを用いて、前記自動運転車両が置かれたトラブルシーン及び生じたトラブル問題を取得し、前記補助制御モジュールが前記制御切替えコマンドを受信した後、前記補助制御モジュールを用いて、前記トラブルシーン及び前記トラブル問題に対応する制御ポリシーを確定するために用いられることを特徴とする請求項11に記載の自動運転車両の制御装置。 - 前記自動運転システムには、異なるシーンにおける異なるトラブル問題に対応する制御ポリシーが記憶されており、前記制御ポリシーは前記自動運転車両のトラブルシーン履歴、トラブル問題履歴及び車内にいる者の乗り心地に基づき設定されることを特徴とする請求項11に記載の自動運転車両の制御装置。
- 前記トラブルシーンは、高速道路、市街地、郊外を含み、
前記トラブル問題は、ブレーキが効かない、操舵のタイミングを誤る、信号無視、減速制御不能を含むことを特徴とする請求項11〜13のいずれか1項に記載の自動運転車両の制御装置。 - 前記制御ポリシーは、安全制限速度、安全停車、路肩停車、非常制動、自動運転解除のうちの1種以上を含むことを特徴とする請求項14に記載の自動運転車両の制御装置。
- 前記制御モジュールは、前記自動運転車両が高速道路でブレーキが効かない問題が生じた場合、前記高速道路トラブルシーンにおけるブレーキが効かない問題に対応する第1の制御ポリシーを安全制限速度内における路肩停車に確定し、前記第1の制御ポリシーに基づき、前記補助制御モジュールを用いて、前記自動運転車両が安全制限速度内において路肩停車するよう制御するために用いられることを特徴とする請求項15に記載の自動運転車両の制御装置。
- 前記制御モジュールは、前記自動運転車両が市街地で信号無視の問題が生じた場合、前記市街地トラブルシーンにおける前記信号無視の問題に対応する第2の制御ポリシーを非常制動に確定し、前記第2の制御ポリシーに基づき、前記補助制御モジュールを用いて、前記自動運転車両が非常制動するよう制御するために用いられることを特徴とする請求項15に記載の自動運転車両の制御装置。
- 前記制御モジュールは、前記自動運転車両が郊外で操舵のタイミングを誤る問題が生じた場合、前記郊外トラブルシーンにおける前記操舵のタイミングを誤る問題に対応する第3の制御ポリシーを安全制限速度内における非常停車に確定し、前記第3の制御ポリシーに基づき、前記補助制御モジュールを用いて、前記自動運転車両が安全制限速度内において非常停車するよう制御するために用いられることを特徴とする請求項15に記載の自動運転車両の制御装置。
- 前記制御モジュールは、前記判断モジュールが前記主制御モジュールの動作状態に異常が生じたことを確定した場合、前記トラブルアラームモジュールにより、予め設定された応答のタイプに基づきアラーム操作を実行するために用いられることを特徴とする請求項11に記載の自動運転車両の制御装置。
- 前記予め設定された応答のタイプは、視覚による注意喚起及び音による注意喚起を含み、
前記自動運転車両の外部にいる者に対して、前記視覚による注意喚起は、非常点滅表示を含み、前記音による注意喚起は、クラクションを含み、
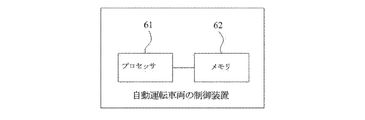
前記自動運転車両の内部にいる者に対して、前記視覚による注意喚起は、前記自動運転車両内のヒューマンコンピュータインタラクション画面にトラブル表示灯を点灯することを含み、前記音による注意喚起は、音のタイプとその持続時間ごとに異なるトラブルタイプに対応する多くのタイプで持続時間が異なる音を含むことを特徴とする請求項19に記載の自動運転車両の制御装置。 - プロセッサと、メモリと、前記メモリに記憶されて前記プロセッサにおいて動作可能なコンピュータプログラムとを含む自動運転車両の制御装置であって、
前記プロセッサが前記コンピュータプログラムを実行する時、請求項1〜10のいずれか1項に記載の自動運転車両の制御方法を実現することを特徴とする自動運転車両の制御装置。 - コンピュータにおいて動作させられる時、前記コンピュータは、請求項1〜10のいずれか1項に記載の自動運転車両の制御方法を実行するコマンドが記憶されていることを特徴とするコンピュータ読み取り可能な記憶媒体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811042108.1 | 2018-09-07 | ||
| CN201811042108.1A CN109367544B (zh) | 2018-09-07 | 2018-09-07 | 自动驾驶车辆控制方法、装置及存储介质 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019182425A true JP2019182425A (ja) | 2019-10-24 |
| JP6870039B2 JP6870039B2 (ja) | 2021-05-12 |
Family
ID=65405355
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019134761A Active JP6870039B2 (ja) | 2018-09-07 | 2019-07-22 | 自動運転車両の制御方法、自動運転車両の制御装置及びコンピュータ読み取り可能な記憶媒体 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6870039B2 (ja) |
| CN (1) | CN109367544B (ja) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110794818A (zh) * | 2019-11-11 | 2020-02-14 | 新石器慧通(北京)科技有限公司 | 一种远程驾驶方法、装置及系统 |
| CN112092824A (zh) * | 2020-08-19 | 2020-12-18 | 浙江吉利汽车研究院有限公司 | 一种自动驾驶控制方法、系统、设备及存储介质 |
| CN112406892A (zh) * | 2020-11-03 | 2021-02-26 | 上海大学 | 一种智能网联汽车感知决策模块功能安全和网络安全内生保障方法 |
| CN113103973A (zh) * | 2021-04-06 | 2021-07-13 | 深圳元戎启行科技有限公司 | 无人驾驶车辆的检测方法、装置、介质及无人驾驶车辆 |
| CN113225433A (zh) * | 2021-03-26 | 2021-08-06 | 北京海纳川汽车部件股份有限公司 | 车辆语音提醒方法、装置、电子设备及存储介质 |
| WO2021192105A1 (ja) * | 2020-03-25 | 2021-09-30 | 日本電気株式会社 | 管制装置、管制システム及び管制方法 |
| CN113696903A (zh) * | 2021-09-28 | 2021-11-26 | 国汽(北京)智能网联汽车研究院有限公司 | 一种车辆控制方法、装置、电子设备及存储介质 |
| CN113757350A (zh) * | 2021-07-30 | 2021-12-07 | 江铃汽车股份有限公司 | 一种智能驾驶车辆挡位控制方法、系统及汽车 |
| CN114044000A (zh) * | 2021-11-05 | 2022-02-15 | 东风汽车集团股份有限公司 | 一种自动驾驶车辆hmi人机交互的安全冗余系统 |
| CN114104002A (zh) * | 2021-12-21 | 2022-03-01 | 华人运通(江苏)技术有限公司 | 自动驾驶系统监控方法、装置、设备和存储介质 |
| CN114326476A (zh) * | 2021-11-30 | 2022-04-12 | 际络科技(上海)有限公司 | 自动驾驶控制器降级控制方法及系统 |
| CN114312707A (zh) * | 2021-12-16 | 2022-04-12 | 东风汽车集团股份有限公司 | 一种基于adas视觉感知的电动真空泵控制方法、系统和介质 |
| EP4019331A1 (en) * | 2020-12-22 | 2022-06-29 | Toyota Jidosha Kabushiki Kaisha | Notification device |
| CN114782926A (zh) * | 2022-06-17 | 2022-07-22 | 清华大学 | 驾驶场景识别方法、装置、设备、存储介质和程序产品 |
| CN114852033A (zh) * | 2022-04-29 | 2022-08-05 | 中汽创智科技有限公司 | 一种制动控制方法、装置、设备及存储介质 |
| CN115556588A (zh) * | 2022-11-14 | 2023-01-03 | 徐州百事利电动车业有限公司 | 一种基于电动车制动的控制系统 |
| CN117104218A (zh) * | 2023-10-24 | 2023-11-24 | 江苏怀广智能交通科技有限公司 | 无人驾驶远程控制协同决策系统 |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109298719B (zh) * | 2018-12-04 | 2021-11-02 | 奇瑞汽车股份有限公司 | 智能汽车的接管方法、装置及存储介质 |
| WO2020210933A1 (zh) * | 2019-04-15 | 2020-10-22 | 深圳市大疆创新科技有限公司 | 一种自动驾驶车辆的报警控制方法、设备及自动驾驶车辆 |
| CN111976727B (zh) * | 2019-05-21 | 2021-12-28 | 华为技术有限公司 | 一种自动驾驶等级调整方法及相关设备 |
| CN110428518B (zh) * | 2019-07-31 | 2022-06-17 | 阿波罗智联(北京)科技有限公司 | 行程中状态的提示方法、装置和存储介质 |
| CN112319496A (zh) * | 2019-08-01 | 2021-02-05 | 北京小马智行科技有限公司 | 自动驾驶车辆的故障处理方法、装置及存储介质 |
| CN110466452B (zh) * | 2019-08-05 | 2020-12-18 | 上海哲奥实业有限公司 | 一种用于车辆操作系统的验证方法、装置及存储介质 |
| CN110568850A (zh) * | 2019-09-12 | 2019-12-13 | 东风汽车有限公司 | 一种无人驾驶汽车内部故障的车辆控制方法及电子设备 |
| CN110562133A (zh) | 2019-09-16 | 2019-12-13 | 北京百度网讯科技有限公司 | 车辆故障处理方法、装置、设备和介质 |
| CN112622927A (zh) * | 2019-10-09 | 2021-04-09 | 宁波吉利汽车研究开发有限公司 | 一种车辆驾驶控制方法、装置、电子设备和存储介质 |
| CN110533947A (zh) * | 2019-10-14 | 2019-12-03 | 北京百度网讯科技有限公司 | 交通工具的控制系统、方法、电子设备和计算机存储介质 |
| CN111028384B (zh) * | 2019-12-12 | 2021-09-28 | 苏州智加科技有限公司 | 自动驾驶车辆的故障智能分类方法和系统 |
| CN111002998A (zh) * | 2019-12-26 | 2020-04-14 | 苏州智加科技有限公司 | 状态提示方法、装置、自动驾驶车辆及存储介质 |
| CN113377573A (zh) * | 2020-03-10 | 2021-09-10 | 北京京东乾石科技有限公司 | 一种自动驾驶车辆的异常处理方法、装置、设备和存储介质 |
| CN111845594B (zh) * | 2020-03-26 | 2022-04-08 | 新奇点智能科技集团有限公司 | 一种汽车故障的处理方法及装置 |
| CN111762179B (zh) * | 2020-05-11 | 2022-07-12 | 广州文远知行科技有限公司 | 车辆控制方法、装置、车辆和计算机可读存储介质 |
| CN111619583A (zh) * | 2020-05-22 | 2020-09-04 | 北京汽车研究总院有限公司 | 用于测试车辆全自动泊车的保护装置、方法及车辆 |
| CN111645725B (zh) * | 2020-06-12 | 2022-07-26 | 中车唐山机车车辆有限公司 | 车辆控制方法、装置及设备 |
| CN111765904B (zh) * | 2020-06-29 | 2023-12-15 | 北京百度网讯科技有限公司 | 自动驾驶车辆的测试方法、装置、电子设备和介质 |
| CN111959521B (zh) * | 2020-08-25 | 2021-11-12 | 厦门理工学院 | 一种无人车控制系统 |
| CN114426026A (zh) * | 2020-10-29 | 2022-05-03 | 观致汽车有限公司 | 安全控制方法、非临时性可读存储介质及车辆 |
| CN112396859B (zh) * | 2020-11-24 | 2022-04-01 | 深圳安途智行科技有限公司 | 基于移动设备的自动驾驶车辆叫停方法及车辆叫停系统 |
| CN112389455B (zh) * | 2021-01-20 | 2021-04-06 | 国汽智控(北京)科技有限公司 | 一种自动驾驶车辆安全运行防护方法及系统 |
| CN114802077B (zh) * | 2021-06-30 | 2023-06-23 | 长城汽车股份有限公司 | 主动应急保护方法、装置、系统、存储介质及车辆 |
| CN113759790A (zh) * | 2021-09-15 | 2021-12-07 | 北京三快在线科技有限公司 | 一种无人驾驶设备的系统优化方法及装置 |
| CN113734201B (zh) * | 2021-09-22 | 2023-05-09 | 中国第一汽车股份有限公司 | 车辆冗余控制方法、装置、电子设备及介质 |
| CN116968754A (zh) * | 2022-04-24 | 2023-10-31 | 中兴通讯股份有限公司 | 自动驾驶方法、控制器和系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003077100A (ja) * | 2001-09-03 | 2003-03-14 | Denso Corp | 異常検出装置、自動運転システム、異常検出方法 |
| JP2008065753A (ja) * | 2006-09-11 | 2008-03-21 | Komatsu Ltd | 車両管制システム |
| JP2011240816A (ja) * | 2010-05-18 | 2011-12-01 | Denso Corp | 自律走行制御装置 |
| JP2018045482A (ja) * | 2016-09-15 | 2018-03-22 | ソニー株式会社 | 撮像装置、信号処理装置、及び、車両制御システム |
| JP2018062237A (ja) * | 2016-10-12 | 2018-04-19 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104290745B (zh) * | 2014-10-28 | 2017-02-01 | 奇瑞汽车股份有限公司 | 车辆用半自动驾驶系统的驾驶方法 |
| DE102015010270B4 (de) * | 2015-08-08 | 2021-10-28 | Audi Ag | Verfahren zum Betrieb von Fahrerassistenzsystemen in einem Kraftfahrzeug und Kraftfahrzeug |
| CN105346483B (zh) * | 2015-11-04 | 2018-07-17 | 常州加美科技有限公司 | 一种无人驾驶车辆的人机交互系统 |
| CN105632216A (zh) * | 2016-01-20 | 2016-06-01 | 李万鸿 | 一种通过网络对道路行驶车辆进行提醒、指示并干涉车辆驾驶的交通信息指挥方法 |
| US10114374B2 (en) * | 2016-11-16 | 2018-10-30 | Baidu Usa Llc | Emergency handling system for an autonomous driving vehicle (ADV) |
| CN108196547B (zh) * | 2018-01-08 | 2020-06-23 | 北京图森未来科技有限公司 | 一种自动驾驶系统 |
-
2018
- 2018-09-07 CN CN201811042108.1A patent/CN109367544B/zh active Active
-
2019
- 2019-07-22 JP JP2019134761A patent/JP6870039B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003077100A (ja) * | 2001-09-03 | 2003-03-14 | Denso Corp | 異常検出装置、自動運転システム、異常検出方法 |
| JP2008065753A (ja) * | 2006-09-11 | 2008-03-21 | Komatsu Ltd | 車両管制システム |
| JP2011240816A (ja) * | 2010-05-18 | 2011-12-01 | Denso Corp | 自律走行制御装置 |
| JP2018045482A (ja) * | 2016-09-15 | 2018-03-22 | ソニー株式会社 | 撮像装置、信号処理装置、及び、車両制御システム |
| JP2018062237A (ja) * | 2016-10-12 | 2018-04-19 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
Cited By (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110794818A (zh) * | 2019-11-11 | 2020-02-14 | 新石器慧通(北京)科技有限公司 | 一种远程驾驶方法、装置及系统 |
| WO2021192105A1 (ja) * | 2020-03-25 | 2021-09-30 | 日本電気株式会社 | 管制装置、管制システム及び管制方法 |
| CN112092824A (zh) * | 2020-08-19 | 2020-12-18 | 浙江吉利汽车研究院有限公司 | 一种自动驾驶控制方法、系统、设备及存储介质 |
| CN112406892A (zh) * | 2020-11-03 | 2021-02-26 | 上海大学 | 一种智能网联汽车感知决策模块功能安全和网络安全内生保障方法 |
| EP4019331A1 (en) * | 2020-12-22 | 2022-06-29 | Toyota Jidosha Kabushiki Kaisha | Notification device |
| CN113225433A (zh) * | 2021-03-26 | 2021-08-06 | 北京海纳川汽车部件股份有限公司 | 车辆语音提醒方法、装置、电子设备及存储介质 |
| CN113103973A (zh) * | 2021-04-06 | 2021-07-13 | 深圳元戎启行科技有限公司 | 无人驾驶车辆的检测方法、装置、介质及无人驾驶车辆 |
| CN113757350A (zh) * | 2021-07-30 | 2021-12-07 | 江铃汽车股份有限公司 | 一种智能驾驶车辆挡位控制方法、系统及汽车 |
| CN113696903A (zh) * | 2021-09-28 | 2021-11-26 | 国汽(北京)智能网联汽车研究院有限公司 | 一种车辆控制方法、装置、电子设备及存储介质 |
| CN114044000A (zh) * | 2021-11-05 | 2022-02-15 | 东风汽车集团股份有限公司 | 一种自动驾驶车辆hmi人机交互的安全冗余系统 |
| CN114044000B (zh) * | 2021-11-05 | 2023-06-23 | 东风汽车集团股份有限公司 | 一种自动驾驶车辆hmi人机交互的安全冗余系统 |
| CN114326476A (zh) * | 2021-11-30 | 2022-04-12 | 际络科技(上海)有限公司 | 自动驾驶控制器降级控制方法及系统 |
| CN114312707B (zh) * | 2021-12-16 | 2022-11-01 | 东风汽车集团股份有限公司 | 一种基于adas视觉感知的电动真空泵控制方法、系统和介质 |
| CN114312707A (zh) * | 2021-12-16 | 2022-04-12 | 东风汽车集团股份有限公司 | 一种基于adas视觉感知的电动真空泵控制方法、系统和介质 |
| CN114104002B (zh) * | 2021-12-21 | 2023-11-21 | 华人运通(江苏)技术有限公司 | 自动驾驶系统监控方法、装置、设备和存储介质 |
| CN114104002A (zh) * | 2021-12-21 | 2022-03-01 | 华人运通(江苏)技术有限公司 | 自动驾驶系统监控方法、装置、设备和存储介质 |
| CN114852033B (zh) * | 2022-04-29 | 2023-02-28 | 中汽创智科技有限公司 | 一种制动控制方法、装置、设备及存储介质 |
| CN114852033A (zh) * | 2022-04-29 | 2022-08-05 | 中汽创智科技有限公司 | 一种制动控制方法、装置、设备及存储介质 |
| CN114782926B (zh) * | 2022-06-17 | 2022-08-26 | 清华大学 | 驾驶场景识别方法、装置、设备、存储介质和程序产品 |
| CN114782926A (zh) * | 2022-06-17 | 2022-07-22 | 清华大学 | 驾驶场景识别方法、装置、设备、存储介质和程序产品 |
| CN115556588A (zh) * | 2022-11-14 | 2023-01-03 | 徐州百事利电动车业有限公司 | 一种基于电动车制动的控制系统 |
| CN115556588B (zh) * | 2022-11-14 | 2023-03-07 | 徐州百事利电动车业有限公司 | 一种基于电动车制动的控制系统 |
| CN117104218A (zh) * | 2023-10-24 | 2023-11-24 | 江苏怀广智能交通科技有限公司 | 无人驾驶远程控制协同决策系统 |
| CN117104218B (zh) * | 2023-10-24 | 2024-01-26 | 江苏怀广智能交通科技有限公司 | 无人驾驶远程控制协同决策系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109367544B (zh) | 2021-01-05 |
| JP6870039B2 (ja) | 2021-05-12 |
| CN109367544A (zh) | 2019-02-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6870039B2 (ja) | 自動運転車両の制御方法、自動運転車両の制御装置及びコンピュータ読み取り可能な記憶媒体 | |
| CN108196547B (zh) | 一种自动驾驶系统 | |
| US20210221339A1 (en) | Vehicle control device, vehicle control method, and program | |
| CN111373335B (zh) | 用于混合驾驶中基于自身觉知性能参数的驾驶模式切换的方法和系统 | |
| CN109204189B (zh) | 自动驾驶系统、故障报警方法及装置 | |
| US10338594B2 (en) | Navigation of autonomous vehicles to enhance safety under one or more fault conditions | |
| JP6345199B2 (ja) | 自動運転制御装置 | |
| JP6112054B2 (ja) | 電子機器、電子機器の制御方法及び電子機器の制御プログラム | |
| CN111699521A (zh) | 用于混合驾驶中基于驾驶者状态的驾驶模式切换的方法和系统 | |
| CN111615723A (zh) | 用于混合驾驶中基于驾驶者状态的增强提示的方法和系统 | |
| JP2019185246A (ja) | 自動運転制御システム | |
| JP2018195246A (ja) | 電子制御装置 | |
| US20210086792A1 (en) | Method of assisting a motor vehicle | |
| CN107218949A (zh) | 用于传送驾驶历史路径属性的系统、方法和装置 | |
| JP2019142246A (ja) | 車両制御装置 | |
| US20210089018A1 (en) | Method for controlling a motor vehicle remotely | |
| JP2017182249A (ja) | 運転支援システム | |
| CN111372830A (zh) | 用于混合驾驶中基于风险的驾驶模式切换的方法和系统 | |
| CN112537311A (zh) | 用于安全可靠地至少部分自动化地引导机动车的方法 | |
| CN111615722A (zh) | 用于切换驾驶模式中的风险控制的方法和系统 | |
| JP2022133549A (ja) | 情報処理装置、情報処理方法、およびシステム | |
| JP2020101986A (ja) | 安全運転支援装置、端末装置、安全運転支援システム、安全運転支援方法、処理実行方法、およびコンピュータプログラム | |
| US20220390251A1 (en) | Information processing apparatus and vehicle | |
| US20230127515A1 (en) | Methods and systems to control driver assist systems | |
| US20230294720A1 (en) | Drive assist apparatus and drive assist method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190722 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200714 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201014 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210323 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210414 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6870039 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |