JP2013090532A - ブラシレスモータ - Google Patents
ブラシレスモータ Download PDFInfo
- Publication number
- JP2013090532A JP2013090532A JP2011231652A JP2011231652A JP2013090532A JP 2013090532 A JP2013090532 A JP 2013090532A JP 2011231652 A JP2011231652 A JP 2011231652A JP 2011231652 A JP2011231652 A JP 2011231652A JP 2013090532 A JP2013090532 A JP 2013090532A
- Authority
- JP
- Japan
- Prior art keywords
- motor case
- brushless motor
- housing member
- motor
- bottom wall
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 229910000831 Steel Inorganic materials 0.000 claims abstract description 17
- 239000010959 steel Substances 0.000 claims abstract description 17
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 claims abstract description 16
- 229910052782 aluminium Inorganic materials 0.000 claims abstract description 16
- 230000002093 peripheral effect Effects 0.000 claims description 10
- 238000003860 storage Methods 0.000 claims description 5
- 239000000758 substrate Substances 0.000 abstract description 12
- 238000004519 manufacturing process Methods 0.000 abstract description 9
- 239000004065 semiconductor Substances 0.000 abstract description 7
- 238000000465 moulding Methods 0.000 abstract description 5
- 239000004411 aluminium Substances 0.000 abstract 1
- 230000005855 radiation Effects 0.000 abstract 1
- 239000013585 weight reducing agent Substances 0.000 abstract 1
- 230000007246 mechanism Effects 0.000 description 12
- 230000009467 reduction Effects 0.000 description 11
- 238000000034 method Methods 0.000 description 9
- 239000000428 dust Substances 0.000 description 6
- 238000003466 welding Methods 0.000 description 6
- 230000004308 accommodation Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 230000017525 heat dissipation Effects 0.000 description 4
- 239000000696 magnetic material Substances 0.000 description 4
- 230000005389 magnetism Effects 0.000 description 4
- 238000007789 sealing Methods 0.000 description 4
- 239000012212 insulator Substances 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 239000003990 capacitor Substances 0.000 description 2
- 238000005266 casting Methods 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 230000003014 reinforcing effect Effects 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 230000004323 axial length Effects 0.000 description 1
- 238000000354 decomposition reaction Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K29/00—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices
- H02K29/06—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with position sensing devices
- H02K29/08—Motors or generators having non-mechanical commutating devices, e.g. discharge tubes or semiconductor devices with position sensing devices using magnetic effect devices, e.g. Hall-plates, magneto-resistors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/10—Casings or enclosures characterised by the shape, form or construction thereof with arrangements for protection from ingress, e.g. water or fingers
Abstract
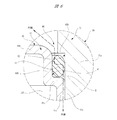
【解決手段】鋼板をプレス成形して筒状に形成し、内部にステータコア42を固定したモータケース41を設け、モータケース41の軸方向一側に、ロータ45に固定される回転軸46の先端側を回転自在に支持するブラケット48を設け、モータケース41の軸方向他側に、ロータ45を駆動制御する制御装置52を収容し、有底筒状に形成されたアルミニウム製の収容部材51を設け、制御装置52は、収容部材51の底部51b側に配置されるパワー系基板53と、収容部材51の開口側に配置される制御系基板54とを備え、パワー系基板53に、収容部材51に接触するよう半導体スイッチング素子SWを配置した。
【選択図】図2
Description
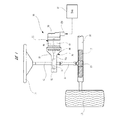
11 ステアリングホイール
12 ステアリングシャフト
13 前輪
14 ユニバーサルジョイント
15 ピニオン
16 タイロッド
17 ラック
18 車載バッテリ
20 ブラシレスモータ(駆動源)
30 減速機構
31 ウォーム
31a ウォーム軸
32 ウォームホイール
33 減速機ケース
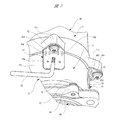
40 モータ部
41 モータケース
41a 本体筒部
41b 第1底壁(底壁)
41c 第2底壁(底壁)
41d 第3底壁(底壁)
41e 第4底壁(底壁)
41f 底穴
41g 貫通孔
41h フランジ部
41j フランジ側第1延出部
41k ネジ孔
41m フランジ側第2延出部
41n 孔部
42 ステータコア
42a インシュレータ
42b コイル
43 バスバーユニット(集電装置)
44 ターミナルソケット
44a 接続端子
45 ロータ
45a 永久磁石
45b ロータケース
46 回転軸
47 連結部材
47a セレーション部
48 ブラケット(支持部材)
48a 嵌合筒部
48b 突当部
48c 軸受固定筒部
48d ブラケット側第1延出部
48e ブラケット側第2延出部
48f 嵌合部
48g 環状凹溝
49 モータケースブラケット(モータケース側固定部)
49a 固着部
49b 固定部
49c ネジ孔
49d 補強リブ
50 コントローラ部
51 収容部材
51a 筒部
51b 底部
51c 端子引出孔
51d コネクタ接続部
51e 収容部材側固定部
51f 雌ネジ部
52 制御装置
53 パワー系基板
53a メス型端子
53b 接続端子
53c 接続線
54 制御系基板
54a MRセンサ
60 印籠嵌合部
61 モータケース側段差部
61a モータケース側嵌合部
61b 小径部
61c 壁部
62 収容部材側段差部
62a 収容部材側嵌合部
62b 突出部
63 Oリング(シール部材)
P 導電板
S 空間
AS 環状空間
BS 軸受支持部
CS 円柱状空間
B1 第1軸受
B2 第2軸受(軸受)
CN 接続コネクタ
SE 磁気式回転センサ
SW 半導体スイッチング素子(パワー系電子部品)
MG センサマグネット部
S1 締結ネジ
S2 固定ネジ
T1 溶接工具
T2 締結工具
Claims (8)
- ステータコアと、前記ステータコア内で回転するロータとを備えたブラシレスモータであって、
鋼板をプレス成形して筒状に形成され、内部に前記ステータコアが固定されるモータケースと、
前記モータケースの軸方向一側に設けられ、前記ロータに固定される回転軸の先端側を回転自在に支持する支持部材と、
前記モータケースの軸方向他側に設けられ、前記ロータを駆動制御する制御装置を収容し、有底筒状に形成されたアルミニウム製の収容部材とを有し、
前記制御装置は、前記収容部材の底部側に配置されるパワー系基板と、前記収容部材の開口側に配置される制御系基板とを備え、前記パワー系基板に、前記収容部材に接触するようパワー系電子部品を配置することを特徴とするブラシレスモータ。 - 請求項1記載のブラシレスモータにおいて、前記モータケースの軸方向他側に底壁を一体に設け、前記底壁に前記回転軸の基端側が貫通する貫通孔を設け、前記貫通孔から延出された前記回転軸の基端側に、前記回転軸の回転を検出する磁気式回転センサを配置することを特徴とするブラシレスモータ。
- 請求項2記載のブラシレスモータにおいて、前記モータケースに前記回転軸の基端側を回転自在に支持する軸受が装着される軸受支持部を設け、前記底壁から軸方向一側にオフセットするよう前記底壁と前記軸受支持部とで形成された円柱状空間を設け、前記磁気式回転センサを構成するセンサマグネット部を前記円柱状空間内に配置することを特徴とするブラシレスモータ。
- 請求項2または3記載のブラシレスモータにおいて、前記ステータコアと前記底壁との間に形成される環状空間に前記ステータコアに巻回されるコイルの端部が接続される集電装置を設け、前記底壁に部分的に形成された底穴を介して前記集電装置と前記制御装置とを電気的に接続することを特徴とするブラシレスモータ。
- 請求項1〜4のいずれか1項に記載のブラシレスモータにおいて、前記モータケースと前記収容部材との間に、前記モータケースと前記収容部材とを連結する印籠嵌合部を設け、前記印籠嵌合部の外側と内側とを結ぶ経路をラビリンス形状に形成することを特徴とするブラシレスモータ。
- 請求項5記載のブラシレスモータにおいて、前記印籠嵌合部の外側と内側とを結ぶ経路にシール部材を配置した状態のもとで、前記モータケースと前記収容部材とを連結することを特徴とするブラシレスモータ。
- 請求項1〜6のいずれか1項に記載のブラシレスモータにおいて、前記モータケースの前記収容部材寄りの外周面に、前記収容部材に設けた収容部材側固定部に固定されるモータケース側固定部を固着することを特徴とするブラシレスモータ。
- 請求項1〜7のいずれか1項に記載のブラシレスモータにおいて、前記ブラシレスモータは、電動パワーステアリング装置の駆動源であることを特徴とするブラシレスモータ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011231652A JP2013090532A (ja) | 2011-10-21 | 2011-10-21 | ブラシレスモータ |
| DE102012109863A DE102012109863A1 (de) | 2011-10-21 | 2012-10-16 | Bürstenloser Motor |
| US13/654,560 US20130099609A1 (en) | 2011-10-21 | 2012-10-18 | Brushless motor |
| CN2012104007621A CN103066787A (zh) | 2011-10-21 | 2012-10-19 | 无刷电动机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011231652A JP2013090532A (ja) | 2011-10-21 | 2011-10-21 | ブラシレスモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013090532A true JP2013090532A (ja) | 2013-05-13 |
| JP2013090532A5 JP2013090532A5 (ja) | 2014-11-20 |
Family
ID=48051440
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011231652A Pending JP2013090532A (ja) | 2011-10-21 | 2011-10-21 | ブラシレスモータ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20130099609A1 (ja) |
| JP (1) | JP2013090532A (ja) |
| CN (1) | CN103066787A (ja) |
| DE (1) | DE102012109863A1 (ja) |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014075866A (ja) * | 2012-10-03 | 2014-04-24 | Mitsubishi Electric Corp | 電動パワーステアリング装置 |
| JP2014090658A (ja) * | 2012-10-03 | 2014-05-15 | Nissan Motor Co Ltd | モータ駆動ユニット |
| JP2015055314A (ja) * | 2013-09-12 | 2015-03-23 | 日本精工株式会社 | 電動モータ、電動パワーステアリング装置及び動力伝達機構 |
| JP2015054630A (ja) * | 2013-09-12 | 2015-03-23 | 日立オートモティブシステムズステアリング株式会社 | パワーステアリング装置およびパワーステアリング装置の気密および液密性の試験方法 |
| WO2016035755A1 (ja) * | 2014-09-01 | 2016-03-10 | 日本精工株式会社 | 電動モータとその制御装置との接続部品及びこれを用いた電動モータとその制御装置との接続構造、並びに、これを用いた電動パワーステアリング装置、電動アクチュエータ、及び、車両 |
| WO2016080127A1 (ja) * | 2014-11-20 | 2016-05-26 | 日本電産株式会社 | モータ |
| JP2017112733A (ja) * | 2015-12-16 | 2017-06-22 | オムロン株式会社 | ブラシレスモータ |
| JP2017180137A (ja) * | 2016-03-28 | 2017-10-05 | 株式会社豊田自動織機 | 流体機械 |
| WO2018193616A1 (ja) * | 2017-04-21 | 2018-10-25 | 三菱電機株式会社 | Dcモータ、egrバルブ、vgアクチュエータ、およびウエストゲートアクチュエータ |
| DE112016006534T5 (de) | 2016-03-02 | 2018-11-22 | Hitachi Automotive Systems, Ltd. | Verbindungs-Anschluss-Baugruppe und elektromotorische Antriebsvorrichtung, welche diese verwendet |
| JP2019054598A (ja) * | 2017-09-13 | 2019-04-04 | シナノケンシ株式会社 | 送風装置 |
| JP2019054597A (ja) * | 2017-09-13 | 2019-04-04 | シナノケンシ株式会社 | 送風装置 |
| JP2019083612A (ja) * | 2017-10-30 | 2019-05-30 | 株式会社ミツバ | モータユニット |
| JP2019135888A (ja) * | 2018-02-05 | 2019-08-15 | 日本電産株式会社 | モータの製造方法、およびモータ |
| CN111845920A (zh) * | 2016-03-09 | 2020-10-30 | 日立汽车系统株式会社 | 电动驱动装置及电动动力转向装置 |
| JP2022017895A (ja) * | 2020-07-14 | 2022-01-26 | 株式会社デンソー | 回転電機 |
| JP7456391B2 (ja) | 2020-02-12 | 2024-03-27 | 日本精工株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
Families Citing this family (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013207578A1 (de) * | 2013-04-25 | 2014-10-30 | Robert Bosch Gmbh | Stellantriebsanordnung mit einem Steckverbinder sowie Steckeranordnung für eine Stellantriebsanordnung und Herstellungsverfahren einer solchen |
| JP2016540682A (ja) * | 2013-11-26 | 2016-12-28 | シェフラー テクノロジーズ アー・ゲー ウント コー. カー・ゲーSchaeffler Technologies AG & Co. KG | 電気信号及び/又はクラッチアクチュエータ接続部を有する、パワーエレクトロニクスモジュール及びハイブリッドモジュール |
| DE112014005392A5 (de) * | 2013-11-26 | 2016-09-01 | Schaeffler Technologies AG & Co. KG | Leistungselektronikmodul und Hybridmodul mit einemE-Motorstromanschluss |
| CN103825408A (zh) * | 2014-02-28 | 2014-05-28 | 深圳市大疆创新科技有限公司 | 电机、应用电机的云台和应用云台的拍摄装置 |
| US10291091B2 (en) * | 2014-09-25 | 2019-05-14 | Magna Powertrain Fpc Limited Partnership | Electric fluid pump with improved rotor unit, rotor unit therefor and methods of construction thereof |
| JP6578642B2 (ja) * | 2014-09-30 | 2019-09-25 | 日本電産株式会社 | モータ |
| DE102014220201A1 (de) * | 2014-10-06 | 2016-04-07 | Bühler Motor GmbH | Elektronisch kommutierter Gleichstrommotor, insbesondere für eine Ölpumpe |
| EP3026798B1 (en) | 2014-11-25 | 2020-10-14 | Black & Decker Inc. | Brushless motor for a power tool |
| KR101674080B1 (ko) * | 2014-12-04 | 2016-11-08 | 뉴모텍(주) | 버스바 어셈블리를 갖는 모터 |
| DE102015100502B4 (de) * | 2015-01-14 | 2023-11-30 | Cayago Tec Gmbh | Unterwasser-Antriebs-Einheit |
| DE102015201411A1 (de) | 2015-01-28 | 2016-07-28 | Robert Bosch Gmbh | Motor-Pumpen-Aggregat für ein Bremssystem |
| US9929624B2 (en) * | 2015-03-19 | 2018-03-27 | Mitsuba Corporation | Brushless motor and wiper apparatus |
| JPWO2017022094A1 (ja) * | 2015-08-05 | 2017-10-19 | 三菱電機株式会社 | インバータ一体型モータ |
| DE102015013337A1 (de) * | 2015-10-14 | 2017-04-20 | Nidec Corporation | Bremsmotor |
| US10786894B2 (en) | 2015-10-14 | 2020-09-29 | Black & Decker Inc. | Brushless motor system for power tools |
| DE102015222266A1 (de) * | 2015-11-11 | 2017-05-11 | Robert Bosch Automotive Steering Gmbh | Elektromechanischer Stellantrieb mit redundantem elektronischen Teilsystem |
| DE102015225843A1 (de) * | 2015-12-18 | 2017-06-22 | Robert Bosch Gmbh | Elektrische Antriebseinheit mit einem Gehäuse |
| JP2017139929A (ja) * | 2016-02-05 | 2017-08-10 | 株式会社デンソー | モータ、および、これを用いた電動パワーステアリング装置 |
| DE102016202226A1 (de) * | 2016-02-15 | 2017-08-17 | Bühler Motor GmbH | Bürstenloser Gleichstrommotor zum Antrieb einer Pumpe |
| JP6514135B2 (ja) * | 2016-03-09 | 2019-05-15 | 日立オートモティブシステムズ株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| FR3050886B1 (fr) * | 2016-04-28 | 2019-12-20 | Valeo Systemes De Controle Moteur | Ensemble comprenant un boitier et un capot maintenant des composants et compresseur de suralimentation electrique le comprenant |
| JP6524023B2 (ja) * | 2016-06-01 | 2019-06-05 | 日立オートモティブシステムズ株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| JP2018002105A (ja) * | 2016-07-08 | 2018-01-11 | Ntn株式会社 | 電動式直動アクチュエータ |
| KR102596664B1 (ko) * | 2016-07-18 | 2023-11-02 | 엘지이노텍 주식회사 | 모터 |
| JPWO2018096705A1 (ja) | 2016-11-23 | 2019-10-17 | 日本電産株式会社 | モータ及び電動パワーステアリング装置 |
| CN106514698A (zh) * | 2016-12-15 | 2017-03-22 | 深圳市优必选科技有限公司 | 舵机 |
| JP6708147B2 (ja) * | 2017-03-06 | 2020-06-10 | 株式会社デンソー | 駆動装置 |
| JP6972482B2 (ja) * | 2017-06-26 | 2021-11-24 | Kyb株式会社 | 電子機器 |
| CN109249985A (zh) * | 2017-07-12 | 2019-01-22 | 株式会社捷太格特 | 转向装置 |
| DE112018003855T5 (de) * | 2017-07-28 | 2020-04-09 | Nidec Corporation | Motor |
| JP6863875B2 (ja) * | 2017-10-27 | 2021-04-21 | 日立Astemo株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| JP2019122077A (ja) * | 2017-12-28 | 2019-07-22 | 日本電産トーソク株式会社 | 電動アクチュエータ、およびアクチュエータ装置 |
| CN108173401A (zh) * | 2018-01-10 | 2018-06-15 | 上海硅泰电子有限公司 | 轮边驱动桥用盘式电机及轮边驱动系统 |
| JP6944889B2 (ja) * | 2018-02-14 | 2021-10-06 | 日立Astemo株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| FR3079887B1 (fr) * | 2018-04-06 | 2021-09-10 | Ksb Sas | Groupe motopompe integre |
| CN108678965A (zh) * | 2018-06-20 | 2018-10-19 | 广州奥姆特机电设备制造有限公司 | 一种充分散热的屏蔽变频循环泵 |
| JP7035999B2 (ja) * | 2018-12-27 | 2022-03-15 | 株式会社豊田自動織機 | 電動圧縮機 |
| JP2020124046A (ja) * | 2019-01-30 | 2020-08-13 | 日本電産トーソク株式会社 | 電動アクチュエータ |
| JP7281687B2 (ja) * | 2019-03-28 | 2023-05-26 | ニデックパワートレインシステムズ株式会社 | 電動オイルポンプ |
| JP6997740B2 (ja) * | 2019-05-28 | 2022-01-18 | Kyb株式会社 | 回転電機及び回転電機の製造方法 |
| CN113939981A (zh) * | 2019-06-20 | 2022-01-14 | 松下知识产权经营株式会社 | 电动机单元和移动体 |
| DE102019212165A1 (de) * | 2019-08-14 | 2021-02-18 | Bühler Motor GmbH | Dichtungsanordnung und elektronisch kommutierter Gleichstrommotor mit dieser Dichtungsanordnung |
| JP7329793B2 (ja) * | 2019-10-10 | 2023-08-21 | 株式会社不二工機 | 弁装置 |
| EP4096073A4 (en) * | 2021-02-10 | 2023-11-15 | NSK Ltd. | ELECTRICAL DRIVE DEVICE, ELECTRIC POWER STEERING DEVICE AND PRODUCTION METHOD FOR AN ELECTRONIC CONTROL DEVICE |
| DE102021123968A1 (de) * | 2021-09-16 | 2023-03-16 | Synapticon GmbH | Integrierte Motorvorrichtung mit steckverbundener Motoreinheit und Servoantriebseinheit |
| CN113659777B (zh) * | 2021-10-11 | 2022-06-17 | 常州宝罗电机有限公司 | 永磁直流无刷电机 |
| DE102022001009B3 (de) * | 2022-03-23 | 2023-05-04 | Sew-Eurodrive Gmbh & Co Kg | Antrieb, aufweisend einen Elektromotor, ein Gehäuseteil und ein Elektronikmodul |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10234158A (ja) * | 1997-02-19 | 1998-09-02 | Tokyo R & D:Kk | 電動モータ |
| JP2002120739A (ja) * | 2000-10-18 | 2002-04-23 | Mitsubishi Electric Corp | 電動パワーステアリング装置 |
| JP2002345211A (ja) * | 2001-05-17 | 2002-11-29 | Mitsubishi Electric Corp | 電動式パワーステアリング装置 |
| JP2004274834A (ja) * | 2003-03-06 | 2004-09-30 | Tamagawa Seiki Co Ltd | 駆動回路内蔵型サーボモータ |
| JP2008175090A (ja) * | 2007-01-16 | 2008-07-31 | Mitsuba Corp | 電動ポンプ |
| JP2009033848A (ja) * | 2007-07-26 | 2009-02-12 | Keihin Corp | ブラシレスモータ |
| JP2009213229A (ja) * | 2008-03-03 | 2009-09-17 | Honda Motor Co Ltd | ブラシレスモータの制御装置および電動ステアリング装置 |
| JP2009232554A (ja) * | 2008-03-21 | 2009-10-08 | Jtekt Corp | 電動モータ、及び電動モータ用ケースの製造方法 |
| JP2010104212A (ja) * | 2008-10-27 | 2010-05-06 | Mitsuba Corp | ブラシレスモータ |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0567168U (ja) * | 1992-02-14 | 1993-09-03 | 株式会社三ツ葉電機製作所 | モータのケーシング構造 |
| GB9812844D0 (en) * | 1998-06-16 | 1998-08-12 | Lucas Ind Plc | Improvements relating to electrical power assisted steering |
| JP2005033924A (ja) * | 2003-07-14 | 2005-02-03 | Honda Motor Co Ltd | 電動機および電動機を搭載した電動パワーステアリング装置 |
| JP4156542B2 (ja) * | 2004-03-03 | 2008-09-24 | 三菱電機株式会社 | 車両用回転電機装置 |
| JP4337669B2 (ja) * | 2004-07-13 | 2009-09-30 | 株式会社デンソー | 車両用電動送風ファン装置 |
| JP4246212B2 (ja) * | 2006-04-21 | 2009-04-02 | 三菱電機株式会社 | 電動式パワーステアリング装置 |
| JP2008029138A (ja) * | 2006-07-21 | 2008-02-07 | Showa Corp | 回転電機用ターミナル |
| JP4688910B2 (ja) * | 2008-08-08 | 2011-05-25 | 三菱電機株式会社 | 電動パワーステアリング装置用モータ |
| JP5603045B2 (ja) * | 2009-09-24 | 2014-10-08 | 三菱電機株式会社 | 電動パワーステアリング装置用モータ装置 |
| JP5063722B2 (ja) * | 2010-03-19 | 2012-10-31 | 三菱電機株式会社 | 電動式駆動装置およびそれを搭載した電動式パワーステアリング装置 |
| JP2011231652A (ja) | 2010-04-26 | 2011-11-17 | Toyota Motor Corp | 高圧燃料ポンプ |
| JP5012953B2 (ja) * | 2010-05-21 | 2012-08-29 | 株式会社デンソー | 駆動装置 |
| JP5338804B2 (ja) * | 2010-12-28 | 2013-11-13 | 株式会社デンソー | 駆動装置、および、これを用いた電動パワーステアリング装置 |
-
2011
- 2011-10-21 JP JP2011231652A patent/JP2013090532A/ja active Pending
-
2012
- 2012-10-16 DE DE102012109863A patent/DE102012109863A1/de not_active Withdrawn
- 2012-10-18 US US13/654,560 patent/US20130099609A1/en not_active Abandoned
- 2012-10-19 CN CN2012104007621A patent/CN103066787A/zh active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10234158A (ja) * | 1997-02-19 | 1998-09-02 | Tokyo R & D:Kk | 電動モータ |
| JP2002120739A (ja) * | 2000-10-18 | 2002-04-23 | Mitsubishi Electric Corp | 電動パワーステアリング装置 |
| JP2002345211A (ja) * | 2001-05-17 | 2002-11-29 | Mitsubishi Electric Corp | 電動式パワーステアリング装置 |
| JP2004274834A (ja) * | 2003-03-06 | 2004-09-30 | Tamagawa Seiki Co Ltd | 駆動回路内蔵型サーボモータ |
| JP2008175090A (ja) * | 2007-01-16 | 2008-07-31 | Mitsuba Corp | 電動ポンプ |
| JP2009033848A (ja) * | 2007-07-26 | 2009-02-12 | Keihin Corp | ブラシレスモータ |
| JP2009213229A (ja) * | 2008-03-03 | 2009-09-17 | Honda Motor Co Ltd | ブラシレスモータの制御装置および電動ステアリング装置 |
| JP2009232554A (ja) * | 2008-03-21 | 2009-10-08 | Jtekt Corp | 電動モータ、及び電動モータ用ケースの製造方法 |
| JP2010104212A (ja) * | 2008-10-27 | 2010-05-06 | Mitsuba Corp | ブラシレスモータ |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014075866A (ja) * | 2012-10-03 | 2014-04-24 | Mitsubishi Electric Corp | 電動パワーステアリング装置 |
| JP2014090658A (ja) * | 2012-10-03 | 2014-05-15 | Nissan Motor Co Ltd | モータ駆動ユニット |
| JP2015055314A (ja) * | 2013-09-12 | 2015-03-23 | 日本精工株式会社 | 電動モータ、電動パワーステアリング装置及び動力伝達機構 |
| JP2015054630A (ja) * | 2013-09-12 | 2015-03-23 | 日立オートモティブシステムズステアリング株式会社 | パワーステアリング装置およびパワーステアリング装置の気密および液密性の試験方法 |
| WO2016035755A1 (ja) * | 2014-09-01 | 2016-03-10 | 日本精工株式会社 | 電動モータとその制御装置との接続部品及びこれを用いた電動モータとその制御装置との接続構造、並びに、これを用いた電動パワーステアリング装置、電動アクチュエータ、及び、車両 |
| WO2016080127A1 (ja) * | 2014-11-20 | 2016-05-26 | 日本電産株式会社 | モータ |
| JP2016100972A (ja) * | 2014-11-20 | 2016-05-30 | 日本電産株式会社 | モータ |
| US10263499B2 (en) | 2014-11-20 | 2019-04-16 | Nidec Corporation | Motor |
| JP2017112733A (ja) * | 2015-12-16 | 2017-06-22 | オムロン株式会社 | ブラシレスモータ |
| DE112016006534T5 (de) | 2016-03-02 | 2018-11-22 | Hitachi Automotive Systems, Ltd. | Verbindungs-Anschluss-Baugruppe und elektromotorische Antriebsvorrichtung, welche diese verwendet |
| US10770955B2 (en) | 2016-03-02 | 2020-09-08 | Hitachi Automotive Systems, Ltd. | Connection terminal assembly and electromotive drive device using same |
| CN111845920B (zh) * | 2016-03-09 | 2022-10-11 | 日立安斯泰莫株式会社 | 电动驱动装置及电动动力转向装置 |
| CN111845920A (zh) * | 2016-03-09 | 2020-10-30 | 日立汽车系统株式会社 | 电动驱动装置及电动动力转向装置 |
| JP2017180137A (ja) * | 2016-03-28 | 2017-10-05 | 株式会社豊田自動織機 | 流体機械 |
| WO2018193616A1 (ja) * | 2017-04-21 | 2018-10-25 | 三菱電機株式会社 | Dcモータ、egrバルブ、vgアクチュエータ、およびウエストゲートアクチュエータ |
| JP2019054597A (ja) * | 2017-09-13 | 2019-04-04 | シナノケンシ株式会社 | 送風装置 |
| JP2019054598A (ja) * | 2017-09-13 | 2019-04-04 | シナノケンシ株式会社 | 送風装置 |
| JP2019083612A (ja) * | 2017-10-30 | 2019-05-30 | 株式会社ミツバ | モータユニット |
| JP2019135888A (ja) * | 2018-02-05 | 2019-08-15 | 日本電産株式会社 | モータの製造方法、およびモータ |
| JP7456391B2 (ja) | 2020-02-12 | 2024-03-27 | 日本精工株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| JP7463974B2 (ja) | 2020-02-12 | 2024-04-09 | 日本精工株式会社 | 電動駆動装置及び電動パワーステアリング装置 |
| JP2022017895A (ja) * | 2020-07-14 | 2022-01-26 | 株式会社デンソー | 回転電機 |
| JP7392599B2 (ja) | 2020-07-14 | 2023-12-06 | 株式会社デンソー | 回転電機 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102012109863A1 (de) | 2013-04-25 |
| US20130099609A1 (en) | 2013-04-25 |
| CN103066787A (zh) | 2013-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6012154B2 (ja) | 電動パワーステアリング装置用ブラシレスモータおよびその製造方法 | |
| JP2013090532A (ja) | ブラシレスモータ | |
| JP5952542B2 (ja) | ブラシレスモータ | |
| JP6639962B2 (ja) | 電動駆動装置及び電動パワーステアリング装置 | |
| JP5397658B2 (ja) | 車両用操舵装置及びそのサブアセンブリの移送方法 | |
| JP5931903B2 (ja) | ブラシレスモータ | |
| JP4623125B2 (ja) | 電動パワ−ステアリング用電動モ−タ装置および電動パワーステアリング装置 | |
| JP4061130B2 (ja) | ブラシレスモータ | |
| KR102066361B1 (ko) | 전동 구동 장치 및 전동 파워 스티어링 장치 | |
| WO2009101788A1 (ja) | 車両用操舵装置 | |
| JP2014187760A (ja) | モータ装置 | |
| KR102144239B1 (ko) | 전동 구동 장치 및 전동 파워 스티어링 장치 | |
| KR20180064521A (ko) | 전동 구동 장치 및 전동 파워 스티어링 장치 | |
| JP5563513B2 (ja) | 電動パワーステアリング装置 | |
| JP5785309B2 (ja) | 電動パワーステアリング装置 | |
| JP5931399B2 (ja) | ブラシレスモータ | |
| JP5397657B2 (ja) | 車両用操舵装置 | |
| US7475755B2 (en) | Electric power steering device | |
| JP5397654B2 (ja) | 車両用操舵装置 | |
| JP2009112139A (ja) | ブラシレスモータ | |
| JP5446045B2 (ja) | 回転電機及び電動パワーステアリング装置 | |
| JP2008125309A (ja) | ブラシレスモータ | |
| JP5299664B2 (ja) | 車両用操舵装置 | |
| JP5397659B2 (ja) | 車両用操舵装置 | |
| JP5196237B2 (ja) | 車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141003 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141003 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150710 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150721 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150924 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160322 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160927 |