JP2018002105A - 電動式直動アクチュエータ - Google Patents
電動式直動アクチュエータ Download PDFInfo
- Publication number
- JP2018002105A JP2018002105A JP2016135816A JP2016135816A JP2018002105A JP 2018002105 A JP2018002105 A JP 2018002105A JP 2016135816 A JP2016135816 A JP 2016135816A JP 2016135816 A JP2016135816 A JP 2016135816A JP 2018002105 A JP2018002105 A JP 2018002105A
- Authority
- JP
- Japan
- Prior art keywords
- winding
- electric
- linear motion
- electric motor
- coil
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/18—Windings for salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/28—Layout of windings or of connections between windings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2793—Rotors axially facing stators
- H02K1/2795—Rotors axially facing stators the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2796—Rotors axially facing stators the rotor consisting of two or more circumferentially positioned magnets where both axial sides of the rotor face a stator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/24—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets axially facing the armatures, e.g. hub-type cycle dynamos
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/52—Fastening salient pole windings or connections thereto
- H02K3/521—Fastening salient pole windings or connections thereto applicable to stators only
- H02K3/522—Fastening salient pole windings or connections thereto applicable to stators only for generally annular cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/06—Means for converting reciprocating motion into rotary motion or vice versa
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D65/00—Parts or details
- F16D65/14—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position
- F16D65/16—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Braking Systems And Boosters (AREA)
- Windings For Motors And Generators (AREA)
Abstract
【解決手段】この電動式直動アクチュエータの電動モータは、トルクに寄与する鎖交磁束を発生する磁極の向きが、電動モータにおける回転軸L1と平行になるように配置された固定子7および回転子を備えるアキシアルギャップモータである。さらに直動機構と電動モータとが、直動機構の回転入出力軸の軸心となる同一の軸心上に並んで配置されている。第1,第2コイル端子53,54は、いずれも回転軸L1の径方向外径側に延長された延長部分53a,54aを有し、延長部分53a,54aは配線機構を介して制御装置に電気的に接続されている。
【選択図】図2
Description
1.直動部の外周に、この直動部と同軸に電動モータを配置した電動ディスクブレーキ装置(特許文献1)。
2.電動モータを直動機構の回転軸と異なる平行軸に配置した電動ブレーキ装置(特許文献2)。
3.8極9スロットのダブルステータ式のアキシアルギャップモータ(特許文献3)。
前記直動機構と前記電動モータとが、前記直動機構の前記回転入出力軸の軸心となる同一の軸心上に並んで配置され、
前記電動モータは、トルクに寄与する鎖交磁束を発生する磁極の向きが、前記電動モータにおける回転軸と平行となるように配置された固定子および回転子を備え、
前記固定子は、前記電動モータに通電する電流を前記鎖交磁束に変換するコイルを含む励磁機構を備え、
前記コイルと前記制御装置とを電気的に接続する配線機構を備え、
前記コイルの巻線の両端部のうち、いずれか一方または両方の端部が前記回転軸における径方向に延長された延長部分を有し、この延長部分が前記配線機構に接続されている。
前記配線機構は、
前記コイルが少なくとも一つ以上の中性点を有するようスター結線され、
前記巻線の両端部のうち、前記他方の端部の延長部分が、前記中性点に接続され、
前記巻線の両端部のうち、前記一方の端部の延長部分が、前記三相交流電流を制御する前記制御装置と接続されているものであっても良い。
径方向外径側に延長されている一方の端部の延長部分が、三相交流電流を制御する制御装置と接続されているため、コイルと制御装置との電気的な接続をコネクタ等を介して簡単に行うことができる。
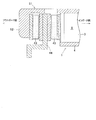
図1に示すように、この電動式直動アクチュエータ1は、電動モータ2と、直動機構3とを軸方向に直列に接続したアクチュエータである。直動機構3と電動モータ2とは、直動機構3の回転入出力軸5の軸心となる同一の軸心上に並んで配置されている。この電動式直動アクチュエータ1は、直動アクチュエータ本体AHと、電動モータ2を制御する制御装置CUとを備える。
電動モータ2は、トルクに寄与する鎖交磁束を発生する磁極の向きが、この電動モータ2における回転軸と平行に配置された固定子7および回転子8を備えた、いわゆるアキシアルギャップ型である。固定子7は、ハウジング4に対して静的に保持される。回転子8は、直動機構3の回転入出力軸5に対して静的に保持され、固定子7との鎖交磁束により回転トルクを発生する。回転子8は、この回転子8の軸方向の両面にそれぞれトルク発生面を有する界磁機構である。前記各「静的に」とは、すきま等の影響を除いて概ね運動が同期する(換言すれば、相対的に拘束された)関係を意味する。
この磁性体コア10Aは、円周方向一定間隔おきに複数設けられている。磁性体コア10Aは、例えば、積層鋼板または圧粉磁心等から成る。各磁性体コア10Aに第1のコイル11Aがそれぞれ巻回されている。第1のコイル11Aは、電動モータ2に通電する電流を前記鎖交磁束に変換する。
積層鋼板または圧粉磁心等から成る磁性体コア10A,磁性体コア10Bを用いると、単位銅損あたりのトルクが向上するため好適と考えられる。但し、磁性体コアを用いず、部品コストの低減およびトルク変動の低減に効果がある空芯コイルにすることもできる。
図2(A)は、図1の電動式直動アクチュエータ1に用いられるアキシアルギャップモータの固定子全体の概略形状を示す斜視図である。同図2(A)中、円筒状のボス部4cbの中心軸L1が、同電動式直動アクチュエータ1の回転軸に対応する。なお、以下の固定子構造および配線機構の説明において、第1,第2の励磁機構7A,7B(図1)共に同様の構成となっているため、第1の励磁機構7Aについて主に説明し、第2の励磁機構7B(図1)については適宜省略する。
また、本図のように平角線を用いて一層に巻線されたコイル11Aを用いると、放熱性が高く、巻線の断面に占める導体の割合である「占積率」に優れた固定子7を構成できるため、好適と考えられる。
ハウジング4内における直動機構収容部4aに、直動機構3の大部分が組み込まれている。直動機構3は、電動モータ2の出力により、後述するブレーキロータに対して制動力を負荷する。この直動機構3は、電動モータ2の回転運動を回転入出力軸5を介して直動部6の直進運動に変換する。
直動機構収容部4aにおける直動部6の軸方向一端側に、軸受ケース32が設けられている。この軸受ケース32は、円筒状のボス部と、このボス部から径方向外方に延びるフランジ部とを有する。前記ボス部内に複数のラジアル軸受35が嵌合され、これらラジアル軸受35の内輪内径面に回転入出力軸5が嵌合されている。回転入出力軸5は、支持部材32に複数のラジアル軸受35を介して回転自在に支持される。
巻線として平角線を適用したうえで、この巻線が前記短手方向に積層されるように巻回されているため、電動モータ2は、前記回転軸の軸方向にコンパクト化することができ、省スペース化をより図ることができる。
以下の説明においては、各実施の形態で先行して説明している事項に対応している部分には同一の参照符号を付し、重複する説明を略する。構成の一部のみを説明している場合、構成の他の部分は、特に記載のない限り先行して説明している形態と同様とする。同一の構成から同一の作用効果を奏する。実施の各形態で具体的に説明している部分の組合せばかりではなく、特に組合せに支障が生じなければ、実施の形態同士を部分的に組合せることも可能である。
この構成において、図3の配線機構55とし、第2コイル端子54の延長部分54aが中性点56に接続されることで、配線長を低減することが可能となる。これにより、損失の低減および材料費の削減において好適となる。
この構成においても、第1,第2コイル端子53,54(図2,4,5)のいずれか一方または両方が径方向外径側に延長された延長部分53a,54aを有することで、電動モータ2のコイル11と制御装置CUとの接続が容易となり、コスト低減と省スペース化を図るうえで有利となる。
キャリパ51のうち、直動機構3の直動部6のアウトボード側端に、インボード側の摩擦パッド43が支持されている。この摩擦パッド43は、ブレーキロータ44のインボード側の側面と軸方向で対向する。電動式直動アクチュエータ1は、摩擦パッド43をブレーキロータ44に対して当接離隔させる駆動を行う。
その他、電動モータは、例えば、回転子が回転することによって固定子インダクタンスが変化する形状の鉄心を用いたリラクタンスモータの構成を採ることもできる。
各実施形態のスラスト軸受の配置は、電動式直動アクチュエータにより対象物を押圧する動作を想定した配置としているが、図示の例と逆側に対して荷重を保持するよう配置し、対象物に引張荷重を印加するアクチュエータを構成することもできる。
スター結線以外に、例えば、デルタ結線を構成することも可能であり、もしくは直列接続された配線機構とすることも可能である。
また、電動式直動アクチュエータに適用するコイルとしては、巻線寸法を小さくできる集中巻が好適と考えられるが、分布巻の構成を採っても良い。
その他、配線の成型方法や配置等は、ハウジング等の形状に応じて適宜設計されるものとする。
また、例えば、モータ角度を検出するモータ角度センサ、サーミスタ、各電装系の配線部品等、電動式直動アクチュエータの適用に必要な構成は適宜設けられるものとする。
2…電動モータ
3…直動機構
4…ハウジング
5…回転入出力軸
6…直動部
7…固定子
7A,7B…第1,第2の励磁機構
8…回転子
11…コイル
11A,11B…第1,第2のコイル(平角線コイル)
11U,11V,11W…コイル群
53,54…第1,第2コイル端子
53a,54a…延長部分
55…配線機構
56…中性点
CU…制御装置
Claims (6)
- 電動モータと、この電動モータの回転運動を回転入出力軸を介して直動部の直進運動に変換する直動機構と、この直動機構を保持するハウジングと、前記電動モータを制御する制御装置と、を備える電動式直動アクチュエータにおいて、
前記直動機構と前記電動モータとが、前記直動機構の前記回転入出力軸の軸心となる同一の軸心上に並んで配置され、
前記電動モータは、トルクに寄与する鎖交磁束を発生する磁極の向きが、前記電動モータにおける回転軸と平行となるように配置された固定子および回転子を備え、
前記固定子は、前記電動モータに通電する電流を前記鎖交磁束に変換するコイルを含む励磁機構を備え、
前記コイルと前記制御装置とを電気的に接続する配線機構を備え、
前記コイルの巻線の両端部のうち、いずれか一方または両方の端部が前記回転軸における径方向に延長された延長部分を有し、この延長部分が前記配線機構に接続された電動式直動アクチュエータ。 - 請求項1に記載の電動式直動アクチュエータにおいて、前記コイルを形成する前記巻線は、この巻線の軸心を含む平面で切断して見た断面が長方形状であり、この長方形状の巻線の前記断面における長手方向が前記回転軸に直交し、且つ、前記長方形状の巻線の前記断面における短手方向が前記回転軸と平行となるように配置され、前記巻線は前記短手方向に積層されるように巻回されている電動式直動アクチュエータ。
- 請求項2に記載の電動式直動アクチュエータにおいて、前記巻線の両端部のうち、いずれか一方の端部の延長部分が前記回転軸における径方向外径側に延長され、他方の端部の延長部分が前記回転軸における径方向内径側に延長されている電動式直動アクチュエータ。
- 請求項1に記載の電動式直動アクチュエータにおいて、前記コイルを形成する前記巻線は、この巻線の軸心に平行な平面で切断して見た断面が長方形状であり、この長方形状の巻線の前記断面における長手方向が前記回転軸に平行であり、且つ、前記長方形状の巻線の前記断面における短手方向が前記回転軸と直交するように配置され、前記巻線は前記短手方向に積層されるように巻回されている電動式直動アクチュエータ。
- 請求項4に記載の電動式直動アクチュエータにおいて、前記巻線の両端部のうち、いずれか一方の端部の延長部分が前記回転軸における径方向外径側に延長され、他方の端部の延長部分が前記回転軸の軸方向に対し平行に延長されている電動式直動アクチュエータ。
- 請求項3または5に記載の電動式直動アクチュエータにおいて、前記励磁機構が三相交流電流の各相に対応するコイル群を有し、
前記配線機構は、
前記コイルが少なくとも一つ以上の中性点を有するようスター結線され、
前記巻線の両端部のうち、前記他方の端部の延長部分が、前記中性点に接続され、
前記巻線の両端部のうち、前記一方の端部の延長部分が、前記三相交流電流を制御する前記制御装置と接続されている電動式直動アクチュエータ。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016135816A JP2018002105A (ja) | 2016-07-08 | 2016-07-08 | 電動式直動アクチュエータ |
| CN201780041921.4A CN109415047A (zh) | 2016-07-08 | 2017-07-05 | 电动式直线移动促动器 |
| PCT/JP2017/024737 WO2018008709A1 (ja) | 2016-07-08 | 2017-07-05 | 電動式直動アクチュエータ |
| EP17824312.7A EP3483016A4 (en) | 2016-07-08 | 2017-07-05 | ELECTRIC LINEAR ACTUATOR |
| US16/241,640 US10886808B2 (en) | 2016-07-08 | 2019-01-07 | Electric linear actuator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016135816A JP2018002105A (ja) | 2016-07-08 | 2016-07-08 | 電動式直動アクチュエータ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2018002105A true JP2018002105A (ja) | 2018-01-11 |
Family
ID=60912900
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016135816A Pending JP2018002105A (ja) | 2016-07-08 | 2016-07-08 | 電動式直動アクチュエータ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10886808B2 (ja) |
| EP (1) | EP3483016A4 (ja) |
| JP (1) | JP2018002105A (ja) |
| CN (1) | CN109415047A (ja) |
| WO (1) | WO2018008709A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9599227B2 (en) | 2010-12-16 | 2017-03-21 | Wartsila Japan Ltd. | Lip seal |
| CN113196619A (zh) * | 2019-02-19 | 2021-07-30 | 株式会社阿斯特 | 线圈接合体和线圈接合体的制造方法 |
| KR20220048262A (ko) * | 2020-10-12 | 2022-04-19 | 한국생산기술연구원 | 축방향 자속형 모터용 평각형 코일 및 코어 |
| JP7503448B2 (ja) | 2020-01-10 | 2024-06-20 | 三星電子株式会社 | アキシャルギャップ型のミニファンモータ |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110098681B (zh) * | 2019-05-09 | 2022-01-07 | 上海大学 | 一种盘式电机绕组 |
| GB2585357B (en) * | 2019-05-10 | 2022-03-09 | Yasa Ltd | Stator for axial flux machine |
| US11616410B2 (en) | 2020-01-10 | 2023-03-28 | Samsung Electronics Co., Ltd. | Cleaner |
| CN113113977B (zh) * | 2020-01-10 | 2022-10-04 | 浙江盘毂动力科技有限公司 | 一种轴向磁场电机的绕组结构及绕制方法 |
| CN111313586B (zh) * | 2020-03-24 | 2022-05-03 | 上海大学 | 一种线圈组、集中式绕组及轴向磁通电机 |
| FR3142302A1 (fr) * | 2022-11-22 | 2024-05-24 | Valeo Equipements Electriques Moteur | Machine électrique tournante polyphasée à flux électromagnétique axial |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6113574U (ja) * | 1984-06-27 | 1986-01-27 | アルプス電気株式会社 | コアレスモ−タ |
| JP2006194356A (ja) * | 2005-01-13 | 2006-07-27 | Ntn Corp | 電動式直動アクチュエータおよび電動式ブレーキ装置 |
| JP2006345655A (ja) * | 2005-06-09 | 2006-12-21 | Nissan Motor Co Ltd | 回転電機のコイル結線構造 |
| JP2008172859A (ja) * | 2007-01-09 | 2008-07-24 | Daikin Ind Ltd | アキシャルギャップ型モータおよび圧縮機 |
| JP2009283591A (ja) * | 2008-05-21 | 2009-12-03 | Toyota Motor Corp | 巻線方法、巻線装置、及び固定子 |
| JP2012050312A (ja) * | 2010-01-06 | 2012-03-08 | Kobe Steel Ltd | アキシャルギャップ型ブラシレスモータ |
| JP2014075877A (ja) * | 2012-10-03 | 2014-04-24 | Hitachi Ltd | アキシャルギャップ型回転電機 |
| WO2014061101A1 (ja) * | 2012-10-16 | 2014-04-24 | 三菱電機株式会社 | 回転電機の電機子 |
| WO2014068695A1 (ja) * | 2012-10-31 | 2014-05-08 | 三菱電機株式会社 | 回転電機のコイルおよび回転電機 |
| WO2015124922A1 (en) * | 2014-02-18 | 2015-08-27 | Yasa Motors Limited | Machine cooling systems |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6113574A (ja) | 1984-06-28 | 1986-01-21 | Shin Kobe Electric Mach Co Ltd | 液体燃料電池 |
| NL1006540C2 (nl) | 1997-07-10 | 1999-01-15 | Skf Ind Trading & Dev | Elektrische actuator met regelsensor, alsmede schijfrem omvattende een dergelijke actuator. |
| JP2001332014A (ja) * | 2000-05-18 | 2001-11-30 | Sony Corp | ターンテーブル及びその製造方法並びにスピンドルモータ及びその製造方法 |
| JP3750933B2 (ja) | 2002-02-22 | 2006-03-01 | 日信工業株式会社 | 電気式ディスクブレーキの配置構造 |
| JP5111863B2 (ja) | 2007-01-10 | 2013-01-09 | 本田技研工業株式会社 | アキシャルギャップ型モータおよび電動パワーステアリング装置 |
| JP2010270788A (ja) | 2009-05-19 | 2010-12-02 | Akebono Brake Ind Co Ltd | ディスクブレーキ |
| CN202183664U (zh) * | 2011-08-08 | 2012-04-04 | 南阳防爆集团股份有限公司 | 一种变频电机电磁线圈的绝缘结构 |
| JP2013090532A (ja) * | 2011-10-21 | 2013-05-13 | Mitsuba Corp | ブラシレスモータ |
| KR101371992B1 (ko) | 2012-12-28 | 2014-03-07 | 현대자동차주식회사 | 자동차용 전동식 브레이크 |
| JP6080682B2 (ja) * | 2013-05-17 | 2017-02-15 | Ntn株式会社 | 電動式直動アクチュエータおよび電動ブレーキ装置 |
| US20160268876A1 (en) * | 2013-08-26 | 2016-09-15 | Mitsubishi Electric Corporation | Electric motor |
| CN204231053U (zh) * | 2014-10-14 | 2015-03-25 | 泉州开普勒车用电机有限公司 | 一种发电机扁线定子 |
-
2016
- 2016-07-08 JP JP2016135816A patent/JP2018002105A/ja active Pending
-
2017
- 2017-07-05 WO PCT/JP2017/024737 patent/WO2018008709A1/ja unknown
- 2017-07-05 EP EP17824312.7A patent/EP3483016A4/en not_active Withdrawn
- 2017-07-05 CN CN201780041921.4A patent/CN109415047A/zh active Pending
-
2019
- 2019-01-07 US US16/241,640 patent/US10886808B2/en active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6113574U (ja) * | 1984-06-27 | 1986-01-27 | アルプス電気株式会社 | コアレスモ−タ |
| JP2006194356A (ja) * | 2005-01-13 | 2006-07-27 | Ntn Corp | 電動式直動アクチュエータおよび電動式ブレーキ装置 |
| JP2006345655A (ja) * | 2005-06-09 | 2006-12-21 | Nissan Motor Co Ltd | 回転電機のコイル結線構造 |
| JP2008172859A (ja) * | 2007-01-09 | 2008-07-24 | Daikin Ind Ltd | アキシャルギャップ型モータおよび圧縮機 |
| JP2009283591A (ja) * | 2008-05-21 | 2009-12-03 | Toyota Motor Corp | 巻線方法、巻線装置、及び固定子 |
| JP2012050312A (ja) * | 2010-01-06 | 2012-03-08 | Kobe Steel Ltd | アキシャルギャップ型ブラシレスモータ |
| JP2014075877A (ja) * | 2012-10-03 | 2014-04-24 | Hitachi Ltd | アキシャルギャップ型回転電機 |
| WO2014061101A1 (ja) * | 2012-10-16 | 2014-04-24 | 三菱電機株式会社 | 回転電機の電機子 |
| WO2014068695A1 (ja) * | 2012-10-31 | 2014-05-08 | 三菱電機株式会社 | 回転電機のコイルおよび回転電機 |
| WO2015124922A1 (en) * | 2014-02-18 | 2015-08-27 | Yasa Motors Limited | Machine cooling systems |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9599227B2 (en) | 2010-12-16 | 2017-03-21 | Wartsila Japan Ltd. | Lip seal |
| CN113196619A (zh) * | 2019-02-19 | 2021-07-30 | 株式会社阿斯特 | 线圈接合体和线圈接合体的制造方法 |
| US12003149B2 (en) | 2019-02-19 | 2024-06-04 | Aster Co., Ltd. | Coil unit and method of manufacturing coil unit |
| CN113196619B (zh) * | 2019-02-19 | 2024-06-04 | 株式会社阿斯特 | 线圈接合体和线圈接合体的制造方法 |
| JP7503448B2 (ja) | 2020-01-10 | 2024-06-20 | 三星電子株式会社 | アキシャルギャップ型のミニファンモータ |
| KR20220048262A (ko) * | 2020-10-12 | 2022-04-19 | 한국생산기술연구원 | 축방향 자속형 모터용 평각형 코일 및 코어 |
| KR102511276B1 (ko) * | 2020-10-12 | 2023-03-20 | 한국생산기술연구원 | 축방향 자속형 모터용 평각형 코일 및 코어 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109415047A (zh) | 2019-03-01 |
| WO2018008709A1 (ja) | 2018-01-11 |
| US20190140508A1 (en) | 2019-05-09 |
| EP3483016A4 (en) | 2020-01-15 |
| EP3483016A1 (en) | 2019-05-15 |
| US10886808B2 (en) | 2021-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018008709A1 (ja) | 電動式直動アクチュエータ | |
| JP6710578B2 (ja) | 電動式直動アクチュエータ | |
| CN112602257B (zh) | 具有电动马达和磁传动装置的电机 | |
| JP5621794B2 (ja) | 磁気変調式複軸モータ | |
| US10931154B2 (en) | Axial-gap type motor | |
| WO2018180721A1 (ja) | 電動モータ | |
| JP6918111B2 (ja) | モーター及び変速機 | |
| JP2008131683A (ja) | アキシャルエアギャップ型電動機 | |
| WO2018038020A1 (ja) | 電動式直動アクチュエータ | |
| JP2017186006A (ja) | モータ及び電動車両 | |
| WO2017204099A1 (ja) | 電動式直動アクチュエータ | |
| JP2014147159A (ja) | 回転電機 | |
| WO2018034247A1 (ja) | 電動モータ装置 | |
| JP4212982B2 (ja) | 回転電機 | |
| CN109417331B (zh) | 电动式直线移动促动器 | |
| JP7561669B2 (ja) | 磁気ギアードモータおよび磁気ギアードモータの製造方法 | |
| CN104247232A (zh) | 电机 | |
| JP2018166354A (ja) | アキシャルギャップ型モータおよびその製造方法 | |
| JP5546146B2 (ja) | 直流モータ | |
| JP2015142439A (ja) | 希土類磁石モータ | |
| KR20210015405A (ko) | 모터 | |
| JP2009033933A (ja) | ブラシレスモータ | |
| JP2020036438A (ja) | 多相クローポールモータ | |
| JP2009033934A (ja) | ブラシレスモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190626 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200512 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200713 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20201117 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20210106 |