JP2009113706A - ハイブリッド車両 - Google Patents
ハイブリッド車両 Download PDFInfo
- Publication number
- JP2009113706A JP2009113706A JP2007290799A JP2007290799A JP2009113706A JP 2009113706 A JP2009113706 A JP 2009113706A JP 2007290799 A JP2007290799 A JP 2007290799A JP 2007290799 A JP2007290799 A JP 2007290799A JP 2009113706 A JP2009113706 A JP 2009113706A
- Authority
- JP
- Japan
- Prior art keywords
- power
- threshold value
- engine
- vehicle
- hybrid vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000002485 combustion reaction Methods 0.000 claims abstract description 19
- 238000009825 accumulation Methods 0.000 abstract 1
- 230000005611 electricity Effects 0.000 abstract 1
- 230000008859 change Effects 0.000 description 21
- 238000010586 diagram Methods 0.000 description 13
- 238000000034 method Methods 0.000 description 8
- 230000007246 mechanism Effects 0.000 description 7
- 101150049032 ACL1 gene Proteins 0.000 description 6
- 101100448894 Arabidopsis thaliana GLR3.1 gene Proteins 0.000 description 6
- 101100054598 Hordeum vulgare ACL1.2 gene Proteins 0.000 description 6
- 101150023061 acpP gene Proteins 0.000 description 6
- 230000007935 neutral effect Effects 0.000 description 6
- 239000003990 capacitor Substances 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000001514 detection method Methods 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 230000001172 regenerating effect Effects 0.000 description 3
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 description 2
- 101150086935 MRN1 gene Proteins 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 229910002092 carbon dioxide Inorganic materials 0.000 description 1
- 239000001569 carbon dioxide Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000016507 interphase Effects 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 229910052987 metal hydride Inorganic materials 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- -1 nickel metal hydride Chemical class 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Arrangement of adaptations of instruments
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
- B60L50/16—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines with provision for separate direct mechanical propulsion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/61—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries by batteries charged by engine-driven generators, e.g. series hybrid electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/24—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries for controlling the temperature of batteries
- B60L58/25—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries for controlling the temperature of batteries by controlling the electric load
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/24—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means
- B60W10/26—Conjoint control of vehicle sub-units of different type or different function including control of energy storage means for electrical energy, e.g. batteries or capacitors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/13—Controlling the power contribution of each of the prime movers to meet required power demand in order to stay within battery power input or output limits; in order to prevent overcharging or battery depletion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/12—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/14—Acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/425—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/441—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/44—Drive Train control parameters related to combustion engines
- B60L2240/443—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/545—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/547—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/549—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/16—Driver interactions by display
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/26—Driver interactions by pedal actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/087—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/244—Charge state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/24—Energy storage means
- B60W2510/242—Energy storage means for electrical energy
- B60W2510/246—Temperature
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Abstract
【課題】内燃機関が動作/停止するタイミングを運転者により適切に告知可能なハイブリッド車両を提供する。
【解決手段】表示部50は、速度表示部110を含む。速度表示部110は、領域112と、しきい線114と、ポインタ116とを含む。領域112は、車両速度(km/h)を表示する。しきい線114は、エンジンの動作/停止が切替わる車両速度のしきい値を表示する。しきい線114は、蓄電装置のSOCや温度、インバータの温度、モータジェネレータの温度等によって可変設定される。ポインタ116は、しきい線114の移動方向を表示する。
【選択図】図2
【解決手段】表示部50は、速度表示部110を含む。速度表示部110は、領域112と、しきい線114と、ポインタ116とを含む。領域112は、車両速度(km/h)を表示する。しきい線114は、エンジンの動作/停止が切替わる車両速度のしきい値を表示する。しきい線114は、蓄電装置のSOCや温度、インバータの温度、モータジェネレータの温度等によって可変設定される。ポインタ116は、しきい線114の移動方向を表示する。
【選択図】図2
Description
この発明は、ハイブリッド車両に関し、特に、走行用の動力源として内燃機関および電動機を搭載したハイブリッド車両に関する。
環境に配慮した自動車としてハイブリッド車(Hybrid Vehicle)が注目されている。ハイブリッド車は、従来のエンジンに加え、蓄電装置に蓄えられた電力を用いてインバータによって駆動される電動機を動力源としてさらに搭載する。
このハイブリッド車においては、車両要求パワーが小さいときは、エンジンを停止させて電動機のみで走行し(電動機走行)、車両要求パワーが大きくなると、エンジンを動作させて電動機およびエンジンで走行可能である(ハイブリッド走行)。
特開2007−125921号公報(特許文献1)は、そのようなハイブリッド車において、現在のアクセル開度と、エンジンが動作するアクセル開度の範囲とを表示するアクセル開度表示バーを開示する。このアクセル開度表示バーによって、運転者は、エンジンが動作しないように(電動機走行を継続するように)アクセル開度を調整することができる(特許文献1参照)。
特開2007−125921号公報
特開2005−35413号公報
しかしながら、アクセル開度は、運転者の意思を反映するための入力手段であり、車両の挙動そのものを示すパラメータではないので、エンジンが動作/停止するタイミングを運転者に告知するパラメータとしてアクセル開度を用いることが必ずしも運転者の感覚に合うとは限らない。
それゆえに、この発明の目的は、内燃機関が動作/停止するタイミングを運転者により適切に告知可能なハイブリッド車両を提供することである。
この発明によれば、ハイブリッド車両は、走行用の動力源として内燃機関および電動機を搭載したハイブリッド車両であって、制御装置と、表示装置とを備える。制御装置は、車両速度が所定の第1のしきい値を超えると内燃機関を動作させる。表示装置は、車両速度とともに第1のしきい値を表示する。
好ましくは、ハイブリッド車両は、蓄電装置をさらに備える。蓄電装置は、電動機へ供給可能な電力を蓄える。制御装置は、蓄電装置の充電状態を示す状態量(SOC)が低いほど、第1のしきい値を低く設定する。
また、好ましくは、ハイブリッド車両は、蓄電装置をさらに備える。蓄電装置は、電動機へ供給可能な電力を蓄える。制御装置は、蓄電装置の温度が規定の範囲から外れると、温度が規定範囲内のときよりも第1のしきい値を低く設定する。
また、好ましくは、制御装置は、電動機の温度が高いほど、第1のしきい値を低く設定する。
また、好ましくは、ハイブリッド車両は、駆動装置をさらに備える。駆動装置は、電動機を駆動する。制御装置は、駆動装置の温度が高いほど、第1のしきい値を低く設定する。
好ましくは、制御装置は、車両速度が第1のしきい値を超えるか、または車両の出力が所定の第2のしきい値を超えると、内燃機関を動作させる。表示装置は、さらに、車両の出力とともに第2のしきい値を表示する。
さらに好ましくは、ハイブリッド車両は、蓄電装置をさらに備える。蓄電装置は、電動機へ供給可能な電力を蓄える。制御装置は、蓄電装置の充電状態を示す状態量(SOC)が低いほど、第2のしきい値を低く設定する。
また、好ましくは、ハイブリッド車両は、蓄電装置をさらに備える。蓄電装置は、電動機へ供給可能な電力を蓄える。制御装置は、蓄電装置の温度が規定の範囲から外れると、温度が規定範囲内のときよりも第2のしきい値を低く設定する。
また、好ましくは、制御装置は、電動機の温度が高いほど、第2のしきい値を低く設定する。
また、好ましくは、ハイブリッド車両は、駆動装置をさらに備える。駆動装置は、電動機を駆動する。制御装置は、駆動装置の温度が高いほど、第2のしきい値を低く設定する。
好ましくは、表示装置は、車両速度および車両の出力を二次元領域に表示し、第1および第2のしきい値に基づいて、内燃機関が停止する領域を二次元領域に併せて表示する。
さらに好ましくは、表示装置は、単位走行距離あたりの電動機の電力消費量が略同一となる等高線を内燃機関の停止領域にさらに表示する。
この発明においては、車両速度または車両の出力(車両パワー)が所定のしきい値を超えると内燃機関が動作する。そして、表示装置は、車両速度および/または車両の出力とともに内燃機関が動作するしきい値を併せて表示するので、運転者は、表示装置の表示に基づいて、車両速度または車両の出力が上記のしきい値を超えないように、すなわち内燃機関が動作しないように、アクセルペダルやブレーキペダルの操作量を調整することができる。
したがって、この発明によれば、車両の挙動に基づいて、内燃機関が動作/停止するタイミングを運転者に適切に告知することができる。そして、内燃機関を停止させて走行することについて運転者にインセンティブを与え、その結果、車両の燃費向上および二酸化炭素排出量の削減に寄与することができる。
以下、本発明の実施の形態について、図面を参照しながら詳細に説明する。なお、図中同一または相当部分には同一符号を付してその説明は繰返さない。
[実施の形態1]
図1は、この発明の実施の形態1によるハイブリッド車両の全体構成を示す機能ブロック図である。図1を参照して、このハイブリッド車両100は、エンジン2と、モータジェネレータMG1,MG2と、動力分割機構3と、車輪4とを備える。また、ハイブリッド車両100は、蓄電装置Bと、昇圧コンバータ10と、インバータ20,30と、コンデンサC1,C2と、ECU(Electronic Control Unit)40と、表示部50とをさらに備える。さらに、ハイブリッド車両100は、電圧センサ60と、電流センサ62と、温度センサ64,66,68とをさらに備える。
図1は、この発明の実施の形態1によるハイブリッド車両の全体構成を示す機能ブロック図である。図1を参照して、このハイブリッド車両100は、エンジン2と、モータジェネレータMG1,MG2と、動力分割機構3と、車輪4とを備える。また、ハイブリッド車両100は、蓄電装置Bと、昇圧コンバータ10と、インバータ20,30と、コンデンサC1,C2と、ECU(Electronic Control Unit)40と、表示部50とをさらに備える。さらに、ハイブリッド車両100は、電圧センサ60と、電流センサ62と、温度センサ64,66,68とをさらに備える。
エンジン2およびモータジェネレータMG1,MG2は、動力分割機構3に連結される。そして、ハイブリッド車両100は、モータジェネレータMG2および/またはエンジン2からの駆動力によって走行する。エンジン2が発生する動力は、動力分割機構3によって2経路に分割される。すなわち、一方は車輪4へ伝達される経路であり、もう一方はモータジェネレータMG1へ伝達される経路である。
モータジェネレータMG1,MG2は、三相交流電動機であり、たとえば三相交流同期電動機から成る。モータジェネレータMG1は、動力分割機構3によって分割されたエンジン2の動力を用いて発電する。たとえば、蓄電装置BのSOC(蓄電装置Bの充電状態を示す状態量であり、たとえば満充電状態を100%として0〜100%の値で示される。)が予め定められた値よりも低くなると、エンジン2が動作してモータジェネレータMG1により発電が行なわれ、その発電された電力は、インバータ20および昇圧コンバータ10を介して蓄電装置Bに供給される。
モータジェネレータMG2は、蓄電装置Bに蓄えられた電力およびモータジェネレータMG1により発電された電力の少なくとも一方を用いて駆動力を発生する。そして、モータジェネレータMG2の駆動力は、車輪4に伝達される。また、車両の制動時等には、車輪4によりモータジェネレータMG2が駆動され、モータジェネレータMG2が発電機として動作する。これにより、モータジェネレータMG2は、制動エネルギーを電力に変換する回生ブレーキとして作動する。そして、モータジェネレータMG2により発電された電力は、インバータ30および昇圧コンバータ10を介して蓄電装置Bに供給される。
動力分割機構3は、サンギヤと、ピニオンギヤと、キャリアと、リングギヤとを含む遊星歯車から成る。ピニオンギヤは、サンギヤおよびリングギヤと係合する。キャリアは、ピニオンギヤを自転可能に支持するとともに、エンジン2のクランクシャフトに連結される。サンギヤは、モータジェネレータMG1の回転軸に連結される。リングギヤはモータジェネレータMG2の回転軸に連結される。
蓄電装置Bは、充電可能な直流電源であり、たとえば、ニッケル水素やリチウムイオン等の二次電池から成る。蓄電装置Bは、直流電力を昇圧コンバータ10へ出力する。また、蓄電装置Bは、昇圧コンバータ10から出力される電力を受けて充電される。なお、蓄電装置Bとして、大容量のキャパシタを用いてもよい。
コンデンサC1は、正極線PL1と負極線NL1との間の電圧変動を平滑化する。昇圧コンバータ10は、ECU40からの信号PWCに基づいて、正極線PL2と負極線NL2との間の電圧を、正極線PL1と負極線NL1との間の電圧以上すなわち蓄電装置Bの電圧以上の電圧に調整する。昇圧コンバータ10は、たとえば、公知の直流チョッパ回路によって構成される。
コンデンサC2は、正極線PL2と負極線NL2との間の電圧変動を平滑化する。インバータ20,30は、正極線PL2および負極線NL2から供給される直流電力を交流電力に変換してそれぞれモータジェネレータMG1,MG2へ出力する。また、インバータ20,30は、それぞれモータジェネレータMG1,MG2が発電する交流電力を直流電力に変換して回生電力として正極線PL2および負極線NL2へ出力する。
なお、各インバータ20,30は、たとえば、三相分のスイッチング素子を含むブリッジ回路から成る。そして、インバータ20,30は、それぞれECU40からの信号PWI1,PWI2に応じてスイッチング動作を行なうことにより、対応のモータジェネレータを駆動する。
電圧センサ60は、蓄電装置Bの電圧VBを検出し、その検出値をECU40へ出力する。電流センサ62は、蓄電装置Bに対して充放電される電流IBを検出し、その検出値をECU40へ出力する。温度センサ64は、蓄電装置Bの温度TBを検出し、その検出値をECU40へ出力する。温度センサ66は、インバータ30の温度TIを検出し、その検出値をECU40へ出力する。温度センサ68は、モータジェネレータMG2の温度TMを検出し、その検出値をECU40へ出力する。
ECU40は、昇圧コンバータ10を駆動するための信号PWCおよびモータジェネレータMG1,MG2をそれぞれ駆動するための信号PWI1,PWI2を生成し、その生成した信号PWC,PWI1,PWI2をそれぞれ昇圧コンバータ10およびインバータ20,30へ出力する。
また、ECU40は、車両速度を示す車速信号SVに基づいて、エンジン2を停止してモータジェネレータMG2のみを用いて走行するか(以下「EV走行」とも称する。)、それともエンジン2を動作させて走行するか(以下「HV走行」とも称する。)の切替を制御する。具体的には、ECU40は、エンジン2の動作/停止が切替わる車両速度を示すエンジン非作動車速しきい値を各センサからの検出値に基づいて設定し、車速信号SVによって示される車両速度をその設定されたエンジン非作動車速しきい値と比較することによって、エンジン2の動作/停止の切替を制御する。
また、ECU40は、設定されたエンジン非作動車速しきい値およびそのしきい値の前回演算時(あるいは所定時間前)からの変動量を車速信号SVとともに表示データDISPとして表示部50へ出力する。なお、ECU40の構成については、後ほど詳しく説明する。
表示部50は、ECU40から受ける車速信号SVに基づいて車両速度を表示するとともに、表示データDISPに含まれるエンジン非作動車速しきい値およびそのしきい値の変動量に基づいて、後述のように、エンジン2の動作/停止が切替わる車速しきい値をその移動方向を示しつつ表示する。
図2は、図1に示した表示部50の表示状態を示した図である。図2を参照して、表示部50は、速度表示部110を含む。速度表示部110は、領域112と、しきい線114と、ポインタ116とを含む。
領域112は、ECU40から受ける車速信号SVに基づいて車両速度(km/h)を表示する。しきい線114は、ECU40から受けるエンジン非作動車速しきい値に基づいて、エンジン2の動作/停止が切替わる車両速度のしきい値を表示する。すなわち、領域112で示される車両速度がしきい線114よりも低いときは、エンジン2は停止し、領域112で示される車両速度がしきい線114を超えると、エンジン2が動作する。
ポインタ116は、ECU40から受けるエンジン非作動車速しきい値の変動量に基づいて、しきい線114の移動方向を表示する。このポインタ116は、エンジン非作動車速しきい値の変化の動向を運転者に与え、車両速度が一定であるにも拘わらずエンジン非作動車速しきい値の低下により車両速度がしきい値に近づいた場合に、運転者に減速を促してEV走行を維持させるものである。
図3は、図1に示したECU40の機能ブロック図である。図3を参照して、ECU40は、コンバータ制御部102と、第1インバータ制御部104と、第2インバータ制御部106と、走行制御部108とを含む。
コンバータ制御部102は、蓄電装置Bの電圧VB、正極線PL2および負極線NL2間の電圧VDC、モータジェネレータMG1,MG2の回転数MRN1,MRN2、ならびに走行制御部108から受けるモータジェネレータMG1,MG2のトルク指令値TR1,TR2に基づいて、昇圧コンバータ10を駆動するための信号PWCを生成し、その生成した信号PWCを昇圧コンバータ10へ出力する。なお、電圧VDCおよび回転数MRN1,MRN2の各々については、図示されないセンサによって検出される。
第1インバータ制御部104は、電圧VDC、モータジェネレータMG1のモータ電流MCRT1およびロータ回転角θ1、ならびにトルク指令値TR1に基づいて、モータジェネレータMG1を駆動するための信号PWI1を生成する。また、第2インバータ制御部106は、電圧VDC、モータジェネレータMG2のモータ電流MCRT2およびロータ回転角θ2、ならびにトルク指令値TR2に基づいて、モータジェネレータMG2を駆動するための信号PWI2を生成する。なお、モータ電流MCRT1,MCRT2およびロータ回転角θ1,θ2の各々については、図示されないセンサによって検出される。
走行制御部108は、車速信号SV、ならびに蓄電装置Bの電圧VB、電流IBおよび温度TB、インバータ30の温度TI、モータジェネレータMG2の温度TMの各検出値を受ける。そして、走行制御部108は、後述の方法により、エンジン2を動作させて走行するか否かを判定し、その判定結果に基づきトルク指令値TR1,TR2を生成してコンバータ制御部102ならびに第1および第2インバータ制御部104,106へ出力する。
また、走行制御部108は、車速信号SV、各センサの検出値に基づいて設定したエンジン非作動車速しきい値、およびそのしきい値の前回演算時(あるいは所定時間前)からの変動量を表示データDISPとして表示部50へ出力する。
図4は、図3に示した走行制御部108の制御構造を説明するためのフローチャートである。なお、このフローチャートの処理は、車両システムの起動中、一定時間毎または所定の条件が成立するごとにメインルーチンから呼び出されて実行される。
図4を参照して、走行制御部108は、蓄電装置Bの電圧VBおよび電流IBに基づいて、蓄電装置BのSOCを算出する(ステップS10)。なお、SOCの算出方法については、種々の公知の手法を用いることができる。
次いで、走行制御部108は、蓄電装置Bの温度TBの検出値を温度センサ64から取得し、インバータ30の温度TIの検出値を温度センサ66から取得し、モータジェネレータMG2の温度TMの検出値を温度センサ68から取得する(ステップS20)。
そして、走行制御部108は、蓄電装置BのSOC、ならびに蓄電装置B、インバータ30およびモータジェネレータMG2の各検出温度に基づいて、エンジン2の動作/停止を判定するためのエンジン非作動車速しきい値を設定する(ステップS30)。具体的には、蓄電装置Bは、低温領域および高温領域で充放電特性が低下するところ、走行制御部108は、蓄電装置Bの温度TBが規定の範囲から外れると、温度TBが規定範囲内のときよりも低くなるようにエンジン非作動車速しきい値を設定する。また、インバータ30およびモータジェネレータMG2の少なくとも一方が高温の場合には、エンジン2による駆動力のアシストを得てモータジェネレータMG2の負荷を抑える必要があるので、走行制御部108は、インバータ30またはモータジェネレータMG2の温度が高くなるほど、エンジン非作動車速しきい値を低く設定する。
次いで、走行制御部108は、車速信号SVによって示される現在の車両速度がステップS30において設定されたエンジン非作動車速しきい値よりも大きいか否かを判定する(ステップS40)。現在の車両速度がエンジン非作動車速しきい値以下であると判定されると(ステップS40においてNO)、後述のステップS70へ処理が移行する。一方、ステップS40において現在の車両速度がエンジン非作動車速しきい値よりも大きいと判定されると(ステップS40においてYES)、走行制御部108は、エンジン2の目標回転数を算出し、実際にエンジン2の制御を実行する(ステップS50)。そして、走行制御部108は、エンジン2を目標回転数に維持するためのモータジェネレータMG1の目標回転数を算出し、モータジェネレータMG1を目標回転数に制御するためのトルク指令値TR1を算出する(ステップS60)。
次いで、走行制御部108は、モータジェネレータMG1のトルク指令値TR1からエンジン2の発生トルク(エンジン直行トルク)を算出する(ステップS70)。なお、エンジン直行トルクは、動力分割機構3の幾何学的構成(歯数比)に基づいてトルク指令値TR1から算出することができる。なお、車両速度がエンジン非作動車速しきい値以下のときは、エンジン2は停止するので、エンジン直行トルクは0となる。そして、エンジン直行トルクが算出されると、走行制御部108は、車両の駆動要求トルクからエンジン直行トルクを減算することにより、モータジェネレータMG2のトルク指令値TR2を算出する(ステップS80)。
次いで、走行制御部108は、エンジン非作動車速しきい値の前回演算時からの変動量を算出する(ステップS90)。この変動量は、エンジン非作動車速しきい値の変化の動向を示すものであり、前回演算時からの変動量に代えて所定時間前からの変動量であってもよい。そして、走行制御部108は、車速信号SV、エンジン非作動車速しきい値、およびエンジン非作動車速しきい値の変動量を表示データDISPとして表示部50へ出力する(ステップS100)。
以上のように、この実施の形態1においては、車両速度がエンジン非作動車速しきい値を超えるとエンジン2が動作する。表示部50は、車両速度とともにエンジン非作動車速しきい値を表示するので、運転者は、表示部50の表示に基づいて、車両速度がエンジン非作動車速しきい値を超えないように、すなわちエンジン2が動作しないように、アクセルペダルやブレーキペダルの操作量を調整することができる。したがって、この実施の形態1によれば、車両の挙動に基づいて、エンジン2が動作/停止するタイミングを運転者に適切に告知することができる。
また、この実施の形態1においては、蓄電装置BのSOCやその温度TB、インバータ30の温度TI、モータジェネレータMG2の温度TM等に基づいてエンジン非作動車速しきい値が設定され、その変化が表示部50に表示される。したがって、この実施の形態1によれば、車両の状態変化によるエンジン2の動作/停止タイミングの変化を運転者に適切に告知することができる。
さらに、この実施の形態1においては、ポインタ116によって、エンジン非作動車速しきい値の変化の動向が表示部50に表示される。したがって、この実施の形態1によれば、車両速度が一定であるにも拘わらずエンジン非作動車速しきい値の低下により車両速度がしきい値に近づいた場合に、運転者に減速を促してEV走行を維持させることができる。
[実施の形態2]
この実施の形態2では、車両速度および車両パワーに基づいて、エンジン2を停止してモータジェネレータMG2のみを用いて走行するか(EV走行)、それともエンジン2を動作させて走行するか(HV走行)の切替が制御される。そして、表示部において、車両速度およびエンジン非作動車速しきい値が表示されるとともに、車両パワーおよびそれに対応するエンジン非作動パワーしきい値がさらに表示される。
この実施の形態2では、車両速度および車両パワーに基づいて、エンジン2を停止してモータジェネレータMG2のみを用いて走行するか(EV走行)、それともエンジン2を動作させて走行するか(HV走行)の切替が制御される。そして、表示部において、車両速度およびエンジン非作動車速しきい値が表示されるとともに、車両パワーおよびそれに対応するエンジン非作動パワーしきい値がさらに表示される。
再び図1を参照して、この実施の形態2によるハイブリッド車両100Aは、図1に示した実施の形態1によるハイブリッド車両100の構成において、ECU40および表示部50に代えてそれぞれECU40Aおよび表示部50Aを備える。
ECU40Aは、車両要求パワーを算出し、その算出した車両要求パワーおよび車速信号SVに基づいて、エンジン2を停止してモータジェネレータMG2のみを用いて走行するか(EV走行)、それともエンジン2を動作させて走行するか(HV走行)の切替を制御する。具体的には、ECU40Aは、エンジン非作動車速しきい値、およびエンジン2の動作/停止が切替わる車両パワーを示すエンジン非作動パワーしきい値を各センサからの検出値に基づいて設定する。そして、ECU40Aは、車両速度をエンジン非作動車速しきい値と比較するとともに、車両要求パワーをエンジン非作動パワーしきい値と比較することによって、エンジン2の動作/停止の切替を制御する。
また、ECU40Aは、車速信号SV、エンジン非作動車速しきい値およびその車速しきい値の前回演算時(あるいは所定時間前)からの変動量、ならびに、車両要求パワー、エンジン非作動パワーしきい値およびそのパワーしきい値の前回演算時(あるいは所定時間前)からの変動量を表示データDISPとして表示部50Aへ出力する。なお、ECU40Aの構成については、後ほど詳しく説明する。
表示部50Aは、表示部50と同様に、車両速度を表示するとともに、エンジン非作動車速しきい値をその移動方向を示しつつ表示する。さらに、表示部50Aは、ECU40Aから受ける車両要求パワーに基づいて車両パワーを表示するとともに、表示データDISPに含まれるエンジン非作動パワーしきい値およびそのしきい値の変動量に基づいて、エンジン2の動作/停止が切替わるパワーしきい値をその移動方向を示しつつ表示する。
図5は、実施の形態2における表示部50Aの表示状態を示した図である。図5を参照して、表示部50Aは、速度表示部110と、パワー表示部120とを含む。速度表示部110およびパワー表示部120は、運転者が同時に視認可能なように、隣接して配置される。
パワー表示部120は、領域122と、しきい線124と、ポインタ126とを含む。領域122は、ECU40Aから受ける車両要求パワーに基づいて車両パワー(%)を表示する。なお、この車両パワー(%)は、車両の最大パワーを100%として0〜100%の値で示されるが、車両パワーの絶対値であってもよい。
しきい線124は、ECU40Aから受けるエンジン非作動パワーしきい値に基づいて、エンジン2の動作/停止が切替わる車両パワーのしきい値(%)を表示する。すなわち、領域122で示される車両パワーがしきい線124よりも小さいときは、エンジン2は停止し、領域122で示される車両パワーがしきい線124を超えると、エンジン2が動作する。
ポインタ126は、ECU40Aから受けるエンジン非作動パワーしきい値の変動量に基づいて、しきい線124の移動方向を表示する。このポインタ126は、エンジン非作動パワーしきい値の変化の動向を運転者に与え、車両パワーが一定であるにも拘わらずエンジン非作動パワーしきい値の低下により車両パワーがしきい値に近づいた場合に、運転者に減速を促してEV走行を維持させるものである。
再び図3を参照して、この実施の形態2におけるECU40Aは、図3に示した実施の形態1におけるECU40の構成において、走行制御部108に代えて走行制御部108Aを含む。
走行制御部108Aは、車速信号SV、アクセルペダルの操作量を示すアクセル開度信号ACC、シフト位置を示すシフト位置信号SP、ならびに蓄電装置Bの電圧VB、電流IBおよび温度TB、インバータ30の温度TI、モータジェネレータMG2の温度TMの各検出値を受ける。そして、走行制御部108Aは、後述の方法により、エンジン2を動作させて走行するか否かを判定し、その判定結果に基づきトルク指令値TR1,TR2を生成してコンバータ制御部102ならびに第1および第2インバータ制御部104,106へ出力する。
また、走行制御部108Aは、車速信号SV、車両要求パワー、各センサの検出値に基づいて設定したエンジン非作動車速しきい値およびエンジン非作動パワーしきい値、ならびにそれらの各しきい値の前回演算時(あるいは所定時間前)からの変動量を表示データDISPとして表示部50Aへ出力する。
図6は、実施の形態2における走行制御部108Aの制御構造を説明するためのフローチャートである。なお、このフローチャートの処理も、車両システムの起動中、一定時間毎または所定の条件が成立するごとにメインルーチンから呼び出されて実行される。
図6を参照して、このフローチャートは、図4に示したフローチャートにおいて、ステップS2,S4,S35,S45をさらに含み、ステップS90およびS100に代えてそれぞれステップS95およびS105を含む。
すなわち、走行制御部108Aは、ステップS10における処理に先立ち、アクセル開度信号ACC、車速信号SVおよびシフト位置信号SPによってそれぞれ示されるアクセル開度、車両速度およびシフト位置に基づいて、予め設定されたマップまたは演算式等を用いて車両の駆動要求トルクを算出する(ステップS2)。そして、走行制御部108Aは、算出された駆動要求トルクと車軸回転数とに基づいて車両要求パワーを算出する(ステップS4)。具体的には、駆動要求トルクに回転数を乗算することにより車両要求パワーが算出される。そして、走行制御部108Aは、ステップS10へ処理を移行する。
また、ステップS30においてエンジン非作動速度しきい値が設定されると、走行制御部108Aは、蓄電装置BのSOC、ならびに蓄電装置B、インバータ30およびモータジェネレータMG2の各検出温度に基づいて、エンジン2の動作/停止を判定するためのエンジン非作動パワーしきい値を設定する(ステップS35)。具体的には、エンジン非作動速度しきい値と同様に、走行制御部108Aは、蓄電装置Bの温度TBが規定の範囲から外れると、温度TBが規定範囲内のときよりも低くなるようにエンジン非作動パワーしきい値を設定し、また、インバータ30またはモータジェネレータMG2の温度が高くなるほど、エンジン非作動パワーしきい値を低く設定する。
また、ステップS40において現在の車両速度がエンジン非作動車速しきい値以下であると判定されると(ステップS40においてNO)、走行制御部108Aは、ステップS4において算出された車両要求パワーがステップS35において設定されたエンジン非作動パワーしきい値よりも大きいか否かを判定する(ステップS45)。
現在の車両要求パワーがエンジン非作動パワーしきい値よりも大きいと判定されると(ステップS45においてYES)、走行制御部108Aは、ステップS50へ処理を移行する。一方、現在の車両要求パワーがエンジン非作動パワーしきい値以下であると判定されると(ステップS45においてNO)、走行制御部108Aは、ステップS70へ処理を移行する。
また、ステップS80においてトルク指令値TR2が算出されると、走行制御部108Aは、エンジン非作動車速しきい値の前回演算時からの変動量を算出するとともに、エンジン非作動パワーしきい値の前回演算時からの変動量を算出する(ステップS95)。このエンジン非作動パワーしきい値の変動量は、エンジン非作動パワーしきい値の変化の動向を示すものであり、前回演算時からの変動量に代えて所定時間前からの変動量であってもよい。
そして、走行制御部108Aは、車速信号SV、エンジン非作動車速しきい値、車両要求パワー、エンジン非作動パワーしきい値、およびステップS95において算出されたエンジン非作動車速しきい値およびエンジン非作動パワーしきい値の各々の変動量を表示データDISPとして表示部50Aへ出力する(ステップS105)。
以上のように、この実施の形態2においては、車両速度または車両パワーがエンジン非作動しきい値を超えるとエンジン2が動作する。表示部50Aは、車両速度とともにエンジン非作動車速しきい値を表示し、さらに、車両パワーとともにエンジン非作動パワーしきい値を表示するので、運転者は、表示部50Aの表示に基づいて、車両速度および車両パワーがエンジン非作動しきい値を超えないように、すなわちエンジン2が動作しないように、アクセルペダルやブレーキペダルの操作量を調整することができる。したがって、この実施の形態2によれば、車両の挙動に基づいて、エンジン2が動作/停止するタイミングを運転者により適切に告知することができる。
また、この実施の形態2においては、蓄電装置BのSOCやその温度TB、インバータ30の温度TI、モータジェネレータMG2の温度TM等に基づいてエンジン非作動パワーしきい値が設定され、その変化が表示部50Aに表示される。さらに、ポインタ126によって、エンジン非作動パワーしきい値の変化の動向が表示部50Aに表示される。したがって、この実施の形態2によっても、実施の形態1と同様の効果が得られる。
[実施の形態3]
実施の形態2では、車両速度および車両パワーの各々は、個別のメータに表示されるものとしたが、この実施の形態3では、車両速度および車両パワーが一つのメータに二次元表示される。
実施の形態2では、車両速度および車両パワーの各々は、個別のメータに表示されるものとしたが、この実施の形態3では、車両速度および車両パワーが一つのメータに二次元表示される。
この実施の形態3によるハイブリッド車両100Bは、実施の形態2によるハイブリッド車両100Aの構成において、表示部50Aに代えて表示部50Bを備える。表示部50Bは、車両速度および車両パワーを二次元表示するとともに、ECU40Aから受けるエンジン非作動車速しきい値、エンジン非作動パワーしきい値およびそれら各しきい値の変動量に基づいて、エンジン非作動しきい値をその移動方向を示しつつ表示する。
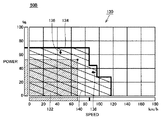
図7は、実施の形態3における表示部50Bの表示状態を示した図である。図7を参照して、表示部50Bは、速度/パワー表示部130を含む。速度/パワー表示部130は、横軸に車両速度(km/h)を表示し、縦軸に車両パワー(%)を表示する。
速度/パワー表示部130は、領域132と、しきい線134と、ポインタ136,138とを含む。領域132は、ECU40Aから受ける車速信号SVおよび車両要求パワーに基づいて、横軸方向に現在の車両速度を、縦軸方向に現在の車両パワー(%)を表示する。しきい線134は、ECU40Aから受けるエンジン非作動車速しきい値およびエンジン非作動パワーしきい値に基づいて、エンジン2の動作/停止が切替わるしきい値を表示する。すなわち、領域132で示される車両速度および車両パワーがしきい線134で囲まれる領域内にあるときは、エンジン2は停止し、領域132で示される車両速度および車両パワーがしきい線134を超えると、エンジン2が動作する。
このしきい線134は、エンジン非作動車速しきい値およびエンジン非作動パワーしきい値に基づいて設定される。なお、高速になるほどモータジェネレータMG2がさらに出力可能なパワーは限られるので、高速になるほどパワーに対するエンジン非作動しきい値は抑えられ(すなわち、高速になるほど、少しの加速要求でエンジン2が始動する。)、ある速度以上になるとエンジン2は常時動作する。
ポインタ136は、ECU40Aから受けるエンジン非作動パワーしきい値の変動量に基づいて、しきい線134の縦軸方向の移動方向を表示する。ポインタ138は、ECU40Aから受けるエンジン非作動車速しきい値の変動量に基づいて、しきい線134の横軸方向の移動方向を表示する。このポインタ136,138は、エンジン非作動しきい値の変化の動向を運転者に与え、走行状態が一定であるにも拘わらずエンジン非作動しきい値の変化により現在の走行状態がしきい値に近づいた場合に、運転者に減速を促してEV走行を維持させるものである。
なお、図8に示すように、しきい線134で囲まれる領域内(エンジン2の停止領域)において、単位走行距離あたりのモータジェネレータMG2の電力消費量が略同一となる等高線140を表示するようにしてもよい。これにより、EV走行中においても、さらに低消費電力走行をするように運転者にインセンティブを与えることができる。
以上のように、この実施の形態3においては、表示部50Bは、車両速度および車両パワーを二次元表示し、さらに、エンジン非作動しきい値をその移動方向を示しつつ表示する。したがって、この実施の形態3によれば、現在の走行状況(車両速度および車両パワー)とエンジンの動作/停止が切替わるしきい値との関係が一目瞭然であり、運転者の瞬時の判断および適切な運転操作の実行に寄与することができる。
また、しきい線134で囲まれる領域内に等高線140を表示することによって、運転者に低消費電力走行のインセンティブを与えることができる。
また、この実施の形態3によれば、車両速度と車両パワーの発生状況とを同時に認識できるので、ドライビングの楽しさも演出可能である。
[実施の形態4]
この実施の形態4では、車両外部の電源から車両に搭載された蓄電装置を充電可能ないわゆる「プラグインハイブリッド車」に適用される場合が示される。プラグインハイブリッド車は、車両外部の電源から供給された電力を用いて長距離のEV走行を可能としたハイブリッド車両であり、エンジン2が動作/停止するタイミングをより適切に運転者に告知することが要求される。すなわち、この発明は、このようなプラグインハイブリッド車に好適である。
この実施の形態4では、車両外部の電源から車両に搭載された蓄電装置を充電可能ないわゆる「プラグインハイブリッド車」に適用される場合が示される。プラグインハイブリッド車は、車両外部の電源から供給された電力を用いて長距離のEV走行を可能としたハイブリッド車両であり、エンジン2が動作/停止するタイミングをより適切に運転者に告知することが要求される。すなわち、この発明は、このようなプラグインハイブリッド車に好適である。
図9は、実施の形態4によるハイブリッド車両の全体構成を示す機能ブロック図である。図9を参照して、ハイブリッド車両100Cは、上記の実施の形態1〜3のいずれかによるハイブリッド車両の構成において、受電部70および電力入力線ACL1,ACL2をさらに備え、ECU40(または40A)に代えてECU40Bを備える。
モータジェネレータMG1は、Y結線された三相コイル7をステータコイルとして含み、三相コイル7の中性点N1に電力入力線ACL1が接続される。また、モータジェネレータMG2も、Y結線された三相コイル8をステータコイルとして含み、三相コイル8の中性点N2に電力入力線ACL2が接続される。そして、電力入力線ACL1,ACL2に受電部70が接続される。受電部70は、車両外部の電源80から蓄電装置Bを充電するための電力を電源80から受電するための電力インターフェースである。
ECU40Bは、電源80から蓄電装置Bの充電が行なわれるとき、電源80から受電部70および電力入力線ACL1,ACL2を介して中性点N1,N2に与えられる交流電力を直流電力に変換して正極線PL2へ出力するように、インバータ20,30を制御するための信号PWI1,PWI2を生成する。
なお、ECU40Bのその他の構成は、ECU40(または40A)と同じである。また、ハイブリッド車両100Cのその他の構成は、上記の実施の形態1〜3に示したハイブリッド車両100(または100A,100B)と同じである。
図10は、図9に示したインバータ20,30およびモータジェネレータMG1,MG2の零相等価回路を示した図である。三相ブリッジ回路から成る各インバータ20,30においては、6個のトランジスタのオン/オフの組合わせは8パターン存在する。その8つのスイッチングパターンのうち2つは相間電圧が零となり、そのような電圧状態は零電圧ベクトルと称される。零電圧ベクトルについては、上アームの3つのトランジスタは互いに同じスイッチング状態(全てオンまたはオフ)とみなすことができ、また、下アームの3つのトランジスタも互いに同じスイッチング状態とみなすことができる。したがって、この図10では、インバータ20の上アームの3つのトランジスタは上アーム20Aとしてまとめて示され、インバータ20の下アームの3つのトランジスタは下アーム20Bとしてまとめて示されている。同様に、インバータ30の上アームの3つのトランジスタは上アーム30Aとしてまとめて示され、インバータ30の下アームの3つのトランジスタは下アーム30Bとしてまとめて示されている。
図10に示されるように、この零相等価回路は、電力入力線ACL1,ACL2を介して中性点N1,N2に与えられる単相交流電力を入力とする単相PWMコンバータとみることができる。そこで、インバータ20,30において零電圧ベクトルを変化させ、インバータ20,30を単相PWMコンバータのアームとして動作するようにスイッチング制御することによって、電力入力線ACL1,ACL2から入力される交流電力を直流電力に変換して正極線PL2へ出力することができる。
図11は、図9に示したハイブリッド車両100Cにおける走行時の蓄電装置BのSOCの変化を示した図である。図11を参照して、車両外部の電源80から蓄電装置Bが充電され、蓄電装置Bが満充電(MAX)の状態からハイブリッド車両100Cの走行が開始されたとする。蓄電装置BのSOCが所定のしきい値Sthを下回るまでは、SOCは維持されず、ハイブリッド車両100Cは、電源80から蓄電装置Bに充電された電力を積極的に消費する「電力消費モード」で走行する。
そして、蓄電装置BのSOCがしきい値Sthを下回ると、ハイブリッド車両100Cは、エンジン2を動作させてモータジェネレータMG1により発電を行ない、蓄電装置BのSOCをしきい値Sth近傍に維持する「電力維持モード」で走行する。
この実施の形態4によるハイブリッド車両100Cでは、表示部50(または50A,50B)を設けることにより、プラグインハイブリッド車が本来志向する、電力消費モードにおけるエンジン2の動作の抑制を図ることが可能である。すなわち、電力消費モードにおいても、車両速度または車両パワーがエンジン非作動しきい値を超えるとエンジン2が動作するところ、このハイブリッド車両100Cでは、表示部50(または50A,50B)において車両速度および/または車両パワーとともにエンジン非動作しきい値を表示することによって、エンジン2を停止させて走行するEV走行へのインセンティブを運転者に与えることができる。
このように、この実施の形態4においては、車両外部の電源80から蓄電装置Bを充電することができる。そして、このようなプラグインハイブリッド車の利用者は、環境意識やコスト意識が高く、できるだけエンジン2を動作させないEV走行を志向するところ、この実施の形態4では、上記の表示部50(または50A,50B)が設けられ、エンジン2が動作/停止するタイミングが運転者に適切に告知される。したがって、この実施の形態4によれば、長距離のEV走行を志向したプラグインハイブリッド車の効果を最大限に引出すことができる。
なお、上記の実施の形態4においては、電源80からの交流電力を中性点N1,N2に与え、インバータ20,30およびモータジェネレータMG1,MG2を単相PWMコンバータとして動作させることによって蓄電装置Bを充電するものとしたが、電源80から蓄電装置Bを充電するための専用の電圧変換器および整流器を別途設けてもよい。
なお、上記の各実施の形態において、車両速度または車両パワーがエンジン非作動しきい値を超えている場合、車両速度または車両パワーがエンジン非作動しきい値よりも小さいときに対してエンジン非作動しきい値を小さな値に設定してもよい。これにより、車両速度または車両パワーがエンジン非作動しきい値近傍のとき、エンジン2の動作/停止が頻繁に繰返されるのを防止することができる。
また、上記の各実施の形態において、車両速度または車両パワーがエンジン非作動しきい値を超えてエンジン2が動作した場合には、領域112,122,132全体または領域112,122,132のしきい値を超えた部分の表示色を変えるようにしてもよい。
また、上記の各実施の形態において、車両速度または車両パワーに拘わらず、蓄電装置BのSOCが低下することによってエンジン2が動作した場合には(実施の形態4における電力維持モードを含む)、エンジン非作動しきい値を下限値に設定したり、しきい線114,124,134を非表示としてもよい。これにより、蓄電装置BのSOCの低下によってエンジン2が動作した場合を、車両速度または車両パワーがエンジン非作動しきい値を超えたことによりエンジン2が動作した場合と峻別して運転者に告知することができる。
また、上記の各実施の形態において、車両速度または車両パワーが変化していないにも拘わらず、エンジン非作動しきい値が低下することによって車両速度または車両パワーがエンジン非作動しきい値を超えた場合には、エンジン2の始動を所定時間(少なくとも運転者が車両を減速するなどの対応が可能な時間)禁止するようにしてもよい。これにより、車両側の状態変化により無条件にエンジン2が始動するのを防止でき、運転者が減速などの対応をとることによってEV走行を維持させることができる。
また、上記の各実施の形態において、運転者がアクセルペダルやブレーキペダルを操作しているとき、エンジン非作動しきい値の変化を禁止するようにしてもよい。言い換えると、エンジン非作動しきい値の変化は、運転者がアクセルペダルやブレーキペダルを操作していないときに許可するようにしてもよい。これにより、運転者は、エンジン非作動しきい値の近傍においても、EV走行を維持しやすくなる。
また、上記の各実施の形態において、車両速度または車両パワーが変化しているとき、エンジン非作動しきい値の変化を禁止するようにしてもよい。言い換えると、エンジン非作動しきい値の変化は、車両速度や車両パワーが変化していないときに許可するようにしてもよい。これによっても、運転者は、エンジン非作動しきい値の近傍においてEV走行を維持しやすくなる。
なお、上記の各実施の形態においては、動力分割機構3によりエンジン2の動力を分割して車輪4とモータジェネレータMG1とに伝達可能なシリーズ/パラレル型のハイブリッド車両について説明したが、この発明は、その他の形式のハイブリッド車両にも適用可能である。すなわち、たとえば、モータジェネレータMG1を駆動するためにのみエンジン2を用い、モータジェネレータMG2でのみ車両の駆動力を発生する、いわゆるシリーズ型のハイブリッド車両や、エンジン2が生成した運動エネルギーのうち回生エネルギーのみが電気エネルギーとして回収されるハイブリッド車両、エンジンを主動力として必要に応じてモータがアシストするモータアシスト型のハイブリッド車両などにもこの発明は適用可能である。
また、この発明は、昇圧コンバータ10を備えないハイブリッド車両にも適用可能である。
なお、上記において、エンジン2は、この発明における「内燃機関」に対応し、モータジェネレータMG2は、この発明における「電動機」に対応する。また、ECU40,40A,40Bは、この発明における「制御装置」に対応し、表示部50,50A,50Bは、この発明における「表示装置」に対応する。
今回開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施の形態の説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
2 エンジン、3 動力分割機構、4 車輪、7,8 三相コイル、10 昇圧コンバータ、20,30 インバータ、20A,30A 上アーム、20B,30B 下アーム、40,40A,40B ECU、50,50A,50B 表示部、60 電圧センサ、62 電流センサ、64,66,68 温度センサ、70 受電部、80 電源、100,100A〜100C ハイブリッド車両、102 コンバータ制御部、104 第1インバータ制御部、106 第2インバータ制御部、108,108A 走行制御部、110 速度表示部、112,122,132 領域、114,124,134 しきい線、116,126,136,138 ポインタ、120 パワー表示部、130 速度/パワー表示部、140 等高線、B 蓄電装置、C1,C2 コンデンサ、PL1,PL2 正極線、NL1,NL2 負極線、MG1,MG2 モータジェネレータ、N1,N2 中性点、ACL1,ACL2 電力入力線。
Claims (12)
- 走行用の動力源として内燃機関および電動機を搭載したハイブリッド車両であって、
車両速度が所定の第1のしきい値を超えると前記内燃機関を動作させる制御装置と、
前記車両速度とともに前記第1のしきい値を表示する表示装置とを備えるハイブリッド車両。 - 前記電動機へ供給可能な電力を蓄える蓄電装置をさらに備え、
前記制御装置は、前記蓄電装置の充電状態を示す状態量が低いほど、前記第1のしきい値を低く設定する、請求項1に記載のハイブリッド車両。 - 前記電動機へ供給可能な電力を蓄える蓄電装置をさらに備え、
前記制御装置は、前記蓄電装置の温度が規定の範囲から外れると、前記温度が前記規定範囲内のときよりも前記第1のしきい値を低く設定する、請求項1に記載のハイブリッド車両。 - 前記制御装置は、前記電動機の温度が高いほど、前記第1のしきい値を低く設定する、請求項1に記載のハイブリッド車両。
- 前記電動機を駆動する駆動装置をさらに備え、
前記制御装置は、前記駆動装置の温度が高いほど、前記第1のしきい値を低く設定する、請求項1に記載のハイブリッド車両。 - 前記制御装置は、前記車両速度が前記第1のしきい値を超えるか、または車両の出力が所定の第2のしきい値を超えると、前記内燃機関を動作させ、
前記表示装置は、さらに、前記車両の出力とともに前記第2のしきい値を表示する、請求項1に記載のハイブリッド車両。 - 前記電動機へ供給可能な電力を蓄える蓄電装置をさらに備え、
前記制御装置は、前記蓄電装置の充電状態を示す状態量が低いほど、前記第2のしきい値を低く設定する、請求項6に記載のハイブリッド車両。 - 前記電動機へ供給可能な電力を蓄える蓄電装置をさらに備え、
前記制御装置は、前記蓄電装置の温度が規定の範囲から外れると、前記温度が前記規定範囲内のときよりも前記第2のしきい値を低く設定する、請求項6に記載のハイブリッド車両。 - 前記制御装置は、前記電動機の温度が高いほど、前記第2のしきい値を低く設定する、請求項6に記載のハイブリッド車両。
- 前記電動機を駆動する駆動装置をさらに備え、
前記制御装置は、前記駆動装置の温度が高いほど、前記第2のしきい値を低く設定する、請求項6に記載のハイブリッド車両。 - 前記表示装置は、前記車両速度および前記車両の出力を二次元領域に表示し、前記第1および第2のしきい値に基づいて、前記内燃機関が停止する領域を前記二次元領域に併せて表示する、請求項6に記載のハイブリッド車両。
- 前記表示装置は、単位走行距離あたりの前記電動機の電力消費量が略同一となる等高線を前記内燃機関の停止領域にさらに表示する、請求項11に記載のハイブリッド車両。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007290799A JP2009113706A (ja) | 2007-11-08 | 2007-11-08 | ハイブリッド車両 |
| US12/289,450 US20090125173A1 (en) | 2007-11-08 | 2008-10-28 | Hybrid vehicle with internal combustion engine and electric motor installed |
| CNA2008101741369A CN101428613A (zh) | 2007-11-08 | 2008-11-07 | 装有内燃机与电动机的混合动力车 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007290799A JP2009113706A (ja) | 2007-11-08 | 2007-11-08 | ハイブリッド車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009113706A true JP2009113706A (ja) | 2009-05-28 |
Family
ID=40624529
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007290799A Pending JP2009113706A (ja) | 2007-11-08 | 2007-11-08 | ハイブリッド車両 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20090125173A1 (ja) |
| JP (1) | JP2009113706A (ja) |
| CN (1) | CN101428613A (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011030444A1 (ja) * | 2009-09-11 | 2011-03-17 | トヨタ自動車株式会社 | ハイブリッド車およびハイブリッド車のパラメータ表示方法 |
| JP2011057115A (ja) * | 2009-09-11 | 2011-03-24 | Toyota Motor Corp | 表示装置およびそれを備えるハイブリッド車両 |
| JP2011140275A (ja) * | 2010-01-07 | 2011-07-21 | Mitsubishi Motors Corp | ハイブリッド車両の表示装置 |
| JP2011213224A (ja) * | 2010-03-31 | 2011-10-27 | Aisin Aw Co Ltd | 運転支援装置、方法およびプログラム |
| JP2011218868A (ja) * | 2010-04-05 | 2011-11-04 | Mitsubishi Motors Corp | 表示装置 |
| WO2011161816A1 (ja) * | 2010-06-25 | 2011-12-29 | トヨタ自動車株式会社 | ハイブリッド車両およびその制御方法 |
| JP2012124043A (ja) * | 2010-12-09 | 2012-06-28 | Sony Corp | 蓄電装置、接続装置、蓄電システム、電子機器、電動車両および電力システム |
| JP2013154716A (ja) * | 2012-01-27 | 2013-08-15 | Toyota Motor Corp | ハイブリッド車両の運転状況表示装置 |
| JP2013154718A (ja) * | 2012-01-27 | 2013-08-15 | Toyota Motor Corp | ハイブリッド車両 |
| JP2014083907A (ja) * | 2012-10-22 | 2014-05-12 | Toyota Motor Corp | 車両の制御装置 |
| US8755963B2 (en) | 2010-06-25 | 2014-06-17 | Toyota Jidosha Kabushiki Kaisha | Electrically-powered vehicle and control method therefor |
| JP5830199B2 (ja) * | 2013-10-30 | 2015-12-09 | 本田技研工業株式会社 | ペダル反力制御装置 |
| CN106926697A (zh) * | 2015-12-30 | 2017-07-07 | 三星显示有限公司 | 用于车辆的显示系统及显示装置 |
| JP2017185965A (ja) * | 2016-04-08 | 2017-10-12 | 三菱自動車工業株式会社 | 運転支援装置 |
| JP2018149943A (ja) * | 2017-03-14 | 2018-09-27 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2020023313A (ja) * | 2018-08-02 | 2020-02-13 | 三菱自動車工業株式会社 | ハイブリッド車両の表示装置 |
| JP2021003984A (ja) * | 2019-06-26 | 2021-01-14 | 本田技研工業株式会社 | 車両システム及びハイブリッド車両 |
| DE112012003475B4 (de) | 2011-08-23 | 2022-06-09 | Hitachi Astemo, Ltd. | Hybridfahrzeug-Steuervorrichtung |
Families Citing this family (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080060370A1 (en) * | 2006-09-13 | 2008-03-13 | Cummins Power Generation Inc. | Method of cooling a hybrid power system |
| JP5368025B2 (ja) * | 2008-07-30 | 2013-12-18 | 富士通テン株式会社 | エコ運転支援装置及び方法 |
| JP5086201B2 (ja) * | 2008-07-30 | 2012-11-28 | 富士通テン株式会社 | エコ運転支援装置及び方法 |
| JP4737277B2 (ja) * | 2008-11-11 | 2011-07-27 | トヨタ自動車株式会社 | 電動車両、電動車両の制御装置、および電動車両の制御プログラム |
| US9008956B2 (en) * | 2009-07-29 | 2015-04-14 | The Invention Science Fund I, Llc | Promotional correlation with selective vehicle modes |
| US9123049B2 (en) | 2009-07-29 | 2015-09-01 | The Invention Science Fund I, Llc | Promotional correlation with selective vehicle modes |
| US20110029189A1 (en) * | 2009-07-29 | 2011-02-03 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Promotional correlation with selective vehicle modes |
| US9073554B2 (en) * | 2009-07-29 | 2015-07-07 | The Invention Science Fund I, Llc | Systems and methods for providing selective control of a vehicle operational mode |
| JP2011057117A (ja) | 2009-09-11 | 2011-03-24 | Toyota Motor Corp | ハイブリッド車 |
| US9506781B2 (en) * | 2009-10-22 | 2016-11-29 | Ford Global Technologies, Llc | Vehicle information display and method |
| DE102009057174A1 (de) * | 2009-12-05 | 2011-06-09 | Volkswagen Ag | Verfahren und Vorrichtung zur Steuerung von Hybrid-Funktionen in einem Kraftfahrzeug |
| US8359133B2 (en) * | 2010-02-19 | 2013-01-22 | Ford Global Technologies, Llc | Engine power elevation and active battery charge energy management strategies for plug-in hybrid electric vehicles |
| US8674637B2 (en) * | 2010-05-19 | 2014-03-18 | Toyota Jidosha Kabushiki Kaisha | Vehicle |
| US8718851B2 (en) * | 2010-06-10 | 2014-05-06 | Toyota Jidosha Kabushiki Kaisha | Control device for hybrid vehicle, control method for hybrid vehicle, and hybrid vehicle |
| KR20120001404A (ko) * | 2010-06-29 | 2012-01-04 | 현대자동차주식회사 | 하이브리드 차량의 파워 상태 표시 장치 및 방법 |
| JP5273121B2 (ja) * | 2010-10-19 | 2013-08-28 | 株式会社デンソー | 発進支援装置 |
| WO2012101796A1 (ja) * | 2011-01-27 | 2012-08-02 | トヨタ自動車株式会社 | 車両および車両用制御方法 |
| CN103703671B (zh) * | 2011-04-28 | 2018-02-23 | 赛伟科有限责任公司 | 电动机和电动机控制器 |
| JP5358622B2 (ja) * | 2011-06-24 | 2013-12-04 | 本田技研工業株式会社 | 回転電機制御装置 |
| EP2743148B1 (en) * | 2011-08-08 | 2018-06-27 | Toyota Jidosha Kabushiki Kaisha | Vehicle status display apparatus of hybrid vehicle |
| DE102011112707B4 (de) * | 2011-09-07 | 2020-11-05 | Volkswagen Aktiengesellschaft | Anzeigevorrichtung für ein Hybridfahrzeug und Verfahren zur Anzeige und Hybridfahrzeug |
| DE102012000584A1 (de) * | 2012-01-13 | 2013-07-18 | Audi Ag | Vorrichtung zur Anzeige von Informationen in einem Hybridfahrzeug |
| DE102012009736A1 (de) * | 2012-05-16 | 2013-11-21 | Audi Ag | Vorrichtung zur Anzeige von Informationen in einem Hybridfahrzeug |
| JP5991375B2 (ja) * | 2012-07-05 | 2016-09-14 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| KR101393543B1 (ko) * | 2012-10-05 | 2014-05-09 | 기아자동차 주식회사 | 하이브리드 자동차의 엔진 기동 제어 방법 및 시스템 |
| EP3009286B1 (en) * | 2013-11-26 | 2018-09-05 | Komatsu Ltd. | Work vehicle, and work vehicle control method |
| TWI592335B (zh) * | 2015-09-24 | 2017-07-21 | 財團法人船舶暨海洋產業研發中心 | 船舶動力控制方法 |
| EP3403866B1 (en) * | 2017-05-18 | 2022-08-10 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Display device for hybrid vehicle |
| US10639994B2 (en) * | 2017-05-18 | 2020-05-05 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Display device for hybrid vehicle |
| CN110789343B (zh) * | 2018-08-02 | 2023-01-06 | 三菱自动车工业株式会社 | 一种混合动力车辆的显示装置 |
| DE102019107779A1 (de) * | 2018-12-04 | 2020-06-04 | Bayerische Motoren Werke Aktiengesellschaft | Betriebsstrategie für Hybrid-Fahrzeuge |
| US20200180432A1 (en) * | 2018-12-11 | 2020-06-11 | Atieva, Inc. | Accelerator Pedal Providing Regenerative Brake Feedback |
| CN109488469B (zh) * | 2018-12-28 | 2020-12-01 | 威睿电动汽车技术(宁波)有限公司 | 一种增程式电动汽车发动机控制方法及控制装置 |
| CN113631412B (zh) * | 2019-03-25 | 2024-01-19 | 三菱自动车工业株式会社 | 显示装置 |
| JP7173289B2 (ja) * | 2019-03-28 | 2022-11-16 | 三菱自動車工業株式会社 | 表示装置 |
| CN110329072A (zh) * | 2019-07-09 | 2019-10-15 | 长城华冠汽车科技(苏州)有限公司 | 电动汽车的运行状态呈现方法和运行状态呈现装置 |
| CN110696615B (zh) * | 2019-10-10 | 2020-10-30 | 浙江吉利汽车研究院有限公司 | 一种混合动力汽车功率表显示方法及系统 |
| US11186199B2 (en) | 2019-11-22 | 2021-11-30 | Toyota Motor Engineering & Manufacturing North America, Inc. | HEV battery SOC meter and boost power display |
| US11447120B2 (en) | 2019-11-22 | 2022-09-20 | Toyota Motor Engineering & Manufacturing North America Inc | HEV battery SOC meter and power split usage display |
| CN111959493B (zh) * | 2020-08-31 | 2023-05-23 | 重庆长安新能源汽车科技有限公司 | 串并联结构混动汽车能量流确定方法、装置及汽车 |
| CN116118525B (zh) * | 2023-04-03 | 2023-06-23 | 成都赛力斯科技有限公司 | 电机扭矩过零控制方法、装置、电子设备及新能源汽车 |
-
2007
- 2007-11-08 JP JP2007290799A patent/JP2009113706A/ja active Pending
-
2008
- 2008-10-28 US US12/289,450 patent/US20090125173A1/en not_active Abandoned
- 2008-11-07 CN CNA2008101741369A patent/CN101428613A/zh active Pending
Cited By (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9254757B2 (en) | 2009-09-11 | 2016-02-09 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle and parameter display method for hybrid vehicle |
| JP2011057115A (ja) * | 2009-09-11 | 2011-03-24 | Toyota Motor Corp | 表示装置およびそれを備えるハイブリッド車両 |
| CN102300757A (zh) * | 2009-09-11 | 2011-12-28 | 丰田自动车株式会社 | 混合动力车以及混合动力车的参数显示方法 |
| WO2011030444A1 (ja) * | 2009-09-11 | 2011-03-17 | トヨタ自動車株式会社 | ハイブリッド車およびハイブリッド車のパラメータ表示方法 |
| JP5206880B2 (ja) * | 2009-09-11 | 2013-06-12 | トヨタ自動車株式会社 | ハイブリッド車およびハイブリッド車のパラメータ表示方法 |
| JP2011140275A (ja) * | 2010-01-07 | 2011-07-21 | Mitsubishi Motors Corp | ハイブリッド車両の表示装置 |
| JP2011213224A (ja) * | 2010-03-31 | 2011-10-27 | Aisin Aw Co Ltd | 運転支援装置、方法およびプログラム |
| JP2011218868A (ja) * | 2010-04-05 | 2011-11-04 | Mitsubishi Motors Corp | 表示装置 |
| CN102712313A (zh) * | 2010-06-25 | 2012-10-03 | 丰田自动车株式会社 | 混合动力车辆及其控制方法 |
| JP5278614B2 (ja) * | 2010-06-25 | 2013-09-04 | トヨタ自動車株式会社 | ハイブリッド車両およびその制御方法 |
| US8718849B2 (en) | 2010-06-25 | 2014-05-06 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle and control method therefor |
| WO2011161816A1 (ja) * | 2010-06-25 | 2011-12-29 | トヨタ自動車株式会社 | ハイブリッド車両およびその制御方法 |
| US8755963B2 (en) | 2010-06-25 | 2014-06-17 | Toyota Jidosha Kabushiki Kaisha | Electrically-powered vehicle and control method therefor |
| JP2012124043A (ja) * | 2010-12-09 | 2012-06-28 | Sony Corp | 蓄電装置、接続装置、蓄電システム、電子機器、電動車両および電力システム |
| US9034511B2 (en) | 2010-12-09 | 2015-05-19 | Sony Corporation | Power storage apparatus, connection apparatus, power storage system, electronic device, motor-driven vehicle, and electric power system |
| DE112012003475B4 (de) | 2011-08-23 | 2022-06-09 | Hitachi Astemo, Ltd. | Hybridfahrzeug-Steuervorrichtung |
| JP2013154716A (ja) * | 2012-01-27 | 2013-08-15 | Toyota Motor Corp | ハイブリッド車両の運転状況表示装置 |
| JP2013154718A (ja) * | 2012-01-27 | 2013-08-15 | Toyota Motor Corp | ハイブリッド車両 |
| JP2014083907A (ja) * | 2012-10-22 | 2014-05-12 | Toyota Motor Corp | 車両の制御装置 |
| US10025341B2 (en) | 2013-10-30 | 2018-07-17 | Honda Motor Co., Ltd. | Pedal reactive force controller |
| JP5830199B2 (ja) * | 2013-10-30 | 2015-12-09 | 本田技研工業株式会社 | ペダル反力制御装置 |
| CN106926697A (zh) * | 2015-12-30 | 2017-07-07 | 三星显示有限公司 | 用于车辆的显示系统及显示装置 |
| JP2017185965A (ja) * | 2016-04-08 | 2017-10-12 | 三菱自動車工業株式会社 | 運転支援装置 |
| JP2018149943A (ja) * | 2017-03-14 | 2018-09-27 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2020023313A (ja) * | 2018-08-02 | 2020-02-13 | 三菱自動車工業株式会社 | ハイブリッド車両の表示装置 |
| JP7410451B2 (ja) | 2018-08-02 | 2024-01-10 | 三菱自動車工業株式会社 | ハイブリッド車両の表示装置 |
| JP2021003984A (ja) * | 2019-06-26 | 2021-01-14 | 本田技研工業株式会社 | 車両システム及びハイブリッド車両 |
| US11440409B2 (en) | 2019-06-26 | 2022-09-13 | Honda Motor Co., Ltd. | Vehicle system and hybrid vehicle |
| JP7149230B2 (ja) | 2019-06-26 | 2022-10-06 | 本田技研工業株式会社 | 車両システム及びハイブリッド車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20090125173A1 (en) | 2009-05-14 |
| CN101428613A (zh) | 2009-05-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009113706A (ja) | ハイブリッド車両 | |
| JP4155321B2 (ja) | ハイブリッド車両の表示装置、ハイブリッド車両、およびハイブリッド車両の表示方法 | |
| JP4211831B2 (ja) | ハイブリッド車両、ハイブリッド車両の制御方法およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| JP4202379B2 (ja) | ハイブリッド車両、ハイブリッド車両の制御方法、その制御方法をコンピュータに実行させるためのプログラム、およびそのプログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP4910917B2 (ja) | ハイブリッド車両、ハイブリッド車両の制御方法およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| US8718854B2 (en) | Electrically-powered vehicle and method for controlling the same | |
| JP5370584B2 (ja) | ハイブリッド車両 | |
| JP5212321B2 (ja) | 表示装置およびそれを備えるハイブリッド車両 | |
| WO2011030444A1 (ja) | ハイブリッド車およびハイブリッド車のパラメータ表示方法 | |
| EP2774802A1 (en) | Vehicle and vehicle control method | |
| JP2007099223A (ja) | ハイブリッド自動車 | |
| JP5765194B2 (ja) | 車両および車両の制御方法 | |
| JPWO2013008328A1 (ja) | 車両の駆動装置および車両の駆動方法 | |
| JP2008230409A (ja) | ハイブリッド車両およびハイブリッド車両の制御方法 | |
| JP4798081B2 (ja) | 電動車両、電動車両の充電制御方法およびその充電制御をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体 | |
| EP2777981B1 (en) | Vehicle and vehicle control method | |
| JP2011166990A (ja) | 電源システム | |
| JP2011057117A (ja) | ハイブリッド車 | |
| JP5598556B2 (ja) | ハイブリッド車両およびその制御方法 | |
| JP2010268617A (ja) | 車両 | |
| JP5712941B2 (ja) | 車両および車両の制御方法 | |
| JP5696755B2 (ja) | ハイブリッド車両の制御装置 | |
| WO2013038498A1 (ja) | 車両および車両の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090428 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090626 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100105 |