本発明の目的は、上述したような構造を改良することである。本発明の第1の特徴は、複数のパッケージを保管及び払い出すための装置であって、保管及び把持デバイスでアクセス可能な複数の棚を含む第1の領域と、各々が独立した排出手段を有する、各々が複数のパッケージを受け取るための複数の経路を含む第2の領域とを備え、保管及び把持デバイスが第2の領域の経路を満たすように構成され、第2の領域から排出されたパッケージを移動させるための搬送手段をさらに備える装置を提供することである。
一般的に、各経路は独立した排出機構を含むものである。
従って、本発明は、保管及び払い出しシステムが、第2の保管領域で追加のロボットアームを利用するものではなく、第2の領域の各経路が独立してコンベヤーにパッケージをアウトプットできるように提供されるものであることが当業者には明らかであろう。このようなシステムは、パッケージを極めて迅速に、並行してアウトプットすることを可能にする。さらに、第2の領域、即ち、経路領域はモジュール形式で容易に作ることができるため、システムの拡張が容易である。例えば、共通のコンベヤーを備えるモジュール形式又は各モジュールが、パッケージをモジュールの端部まで搬送して、近接したモジュールのコンベヤー又は、追加のコンベヤー或いはディスペンシング・シュートなどの下流側の払い出しシステムに移動させるようなコンベヤーを備えるモジュール形式などがある。
経路領域から排出されたパッケージを受け取るコンベヤーの構造は、複数の異なるパッケージが同時に必要な場合、例えば、1つの処方箋で必要な場合又は病棟回診用の注文に応じる場合など、搬送手段が一時的にバッファのような機能を果たし得ることを理解されたい。パッケージを一緒に集め、搬送システム又は搬送地点まで同時に搬送することにより、各パッケージが一つ一つ順に搬送地点まで搬送される従来技術の構造と比較して、著しく時間を節約することができる。この構造は、当然のことながら、保管及び取り出し装置と、最終的な搬送先、例えば、薬局の受付との間の距離が比較的長い場合に有用である。この構造は、通常、薬局で働く人に作業スペースの制限をなくし、装置が動作する際に生じる騒音から距離をおけるようにすることから望ましい。
本発明の装置が十分に高い位置に配置された場合、パッケージが経路領域の経路から排出されて、コンベヤーに落下した後でさえ、依然として装置は、最終搬送機構、例えば、シュートにとって十分に高い位置にある。好適な実施形態において、しかし、経路領域から排出されたパッケージを持上げて、所定の上昇高さにあるコンベヤーの上に置くためのリフト手段が備えられている。例えば、好適な実施形態において、リフト手段は経路領域に近接して備えられ、経路から排出されたパッケージが搬送手段によってリフト手段まで搬送されるように配置される。この形態は、また、パッケージを取り出すために1つ又は複数のロボットアームを備える構造と比較して、装置の構造及び最終搬送地点まで搬送するための配置場所に関して柔軟に対応することができ、しかも著しくコストを増加することもないことから有用である。
さらに、1つのリフトが複数の経路モジュールに対応するように備えられることもできる。実際、リフトを追加することなく、さらに経路モジュールを現在のシステムに追加することもできる。リフト手段は、搬送手段に加えて又は搬送手段の代わりに、複数のパッケージを集めて、同時に搬送することを可能にするようなバッファとして機能しても良く、パッケージを1つずつ最終搬送地点まで搬送するものと比較して、アウトプット速度が向上することを理解されたい。
リフトは、パッケージを最終搬送システム、例えば、シュートなどに排出するように構成されることが望ましい。実際、実施形態によっては、装置が複数の異なる最終搬送地点を含むことが望ましく、例えば、複数のオペレータに供給するようにすることが望ましい。その場合、リフトは複数の最終搬送機構の1つにパッケージを移送し得る。例えば、ディスペンシング・シュートは、リフト手段の移動経路に従って異なる高さに配置されることもでき、リフト手段の上に置かれたパッケージを排出するのに適した高さまで上昇させることによって、パッケージを所望の最終搬送地点に選択的に払い出されるようにすることもできる。
リフト手段は、パッケージを所定の異なる高さまで上昇させ、パッケージを更なる搬送システム、例えば、アウトプット・シュートなどに搬送する、又はパッケージを取出せるように構成すべきものである。リフト手段は、様々な構造をとることが可能である。1つの使用し得る構造では、搬送手段、又は搬送手段の少なくとも一部が、必要に応じて上昇及び下降可能に構成される。この構成は、スペース効率を含め、いくつかの有用な点がある。また、単に高い位置まで上昇を行うプラットフォームが備えられることもできる。
パッケージの排出は、所望の高さにおいて様々な方法で実行できる。昇降プラットフォームは、リフトの所望の出口側の側面から遠ざかるに従って上向きに傾斜し得る。ドア又はゲートが、プラットフォーム自身に取り付けられる、又はプラットフォームと対向する面の装置の壁に取り付けられる。また、ドア/ゲートの有無に関係なく、所望の高さに到達したときのみ、プラットフォームが傾けられるようにすることもできる。1つの使用し得る実施例は、プラットフォームが両側から吊るされたものであり、両側の吊り下げ高さに差があるとき、プラットフォームが傾けられるようにすることもできる。
本発明では、保管及び取り出しデバイスを用いる第1の領域からのアウトプットは、第2の領域、即ち、経路領域からのアウトプットと完全に独立するようにすることもできる。しかしながら、少なくとも一部の好適な実施形態では、第1及び第2の領域から各々払い出されたパッケージが移送される経路は、少なくとも一部が共通している。実際、共通の搬送手段が使用されることもでき、それによって、両方の領域からのパッケージが最終搬送地点まで搬送される。この形態は、1つの注文を取りまとめるために必要なパッケージを、第1及び第2の領域の間で分配し得るため、コンベヤーのバッファ機能の効果を発揮させやすい。しかしながら、好適な構成では、第1及び第2の領域から払い出されるパッケージは、少なくともその経路の一部において、互いに別々の経路を用いるため、全体のアウトプット速度を遅くさせるようなボトルネックとなる問題の発生を防止しやすくしている。
本発明に基づく装置は、経路領域から排出されたパッケージを、搬送手段に直接落下させるように構成することもできる。しかしながら、この構成は落下を強制するため、結果としてパッケージ又はその中の内容物にダメージを与える可能性が大きくなるため好ましくない。好適な実施形態では、従って、落下するパッケージを受け取るための衝撃を和らげる緩衝領域が備えられ、パッケージはそこからコンベヤーの上に落とされる、又は更に短い距離を滑ってコンベヤーの上に搬送される。これは多くの実施方法で実施可能であるが、ゆるく吊るされたシート状の材料、例えば、パッケージが大きく跳ね返らず、落下するパッケージの衝撃を和らげることができるような繊維を用いることが好ましい。
好適な実施形態によっては、2つの別々の経路領域を備えるようにすることもでき、共通の緩衝領域又は好ましくは各々緩衝領域を有して、共通の搬送手段に供給するようにすることもできる。
2つ又はそれより多くの別々の経路領域を備えることは、一連の好適な実施形態の一般的な特徴である。当然のことながら、本発明では、これら経路領域の1つは、上述したような本発明の装置の第2の領域、即ち、経路領域である。従って、それが第1の領域の棚にアクセスする保管及び取り出しデバイスによって満たされるように構成される。様々な追加の経路領域が、同じ保管及び取り出しデバイスによって満たされるように備えられることもできる。また、1つ又は複数の追加の保管及び取り出しデバイスが備えられることもできる。また、1つ又は複数の追加の経路領域が、手動で満たされるように構成されることもできる。この構成は、他の経路領域での故障の発生に対する手動バックアップを可能にする、及び/又はインプット速度を速くするため、システムにパッケージを入れることを手動で補えるようにする。
複数の経路領域が備えられている場合、これら経路領域は、共通のリフト手段によってパッケージが供給されることが望ましい。しかし、能力又はバックアップの理由から、1つ以上のリフトを備えて、各リフトが各経路領域にパッケージを供給できるようにすることもできる。
各経路に備えられている排出手段は、様々な利便性の高い特定の形態をしていて良く、例えば、各経路の最前部は、その経路の前方から、その最前部にあるパッケージを傾けて落とす又は放出するようにしながら、他のパッケージは排出されないようにし、その後新たなパッケージが最前部に受け取られるように、残りのパッケージが経路を滑り降りることができるように構成することもできる。
特に好適な一連の実施形態では、排出手段は、パッケージを受け取る第1の位置から、パッケージを排出する第2の位置までピボットするように構成されたピボット部材を含むものであり、ピボット部材は、第2の位置において、追加のパッケージを受け取るのを阻止するように構成される。
このような構成は、それ自体が新規で独創的であることから、本発明の更なる特徴は、複数のパッケージを受け取るための経路と、経路から1つずつパッケージを排出するための排出手段とを提供することであり、前記排出手段が、パッケージを受け取る第1の位置から、パッケージを排出する第2の位置までピボットするように構成されたピボット部材を含み、前記ピボット部材は、第2の位置において、追加のパッケージを受け取るのを阻止するように構成されることである。
これは同期アクチュエータ又は規定された時間だけ正確に作動するアクチュエータを用いるような複雑な構成を必要とすることなく、容易かつ確実に、パッケージを1つずつ排出することができる点で有用である。
上述したような本発明の特徴は、1つのパッケージが排出されて、ピボット部材が第1の位置に戻ると、次のパッケージがピボット部材によって受け取られるように、経路に残っているパッケージが構成されることである。この構成は、様々な適当な力、例えば、ばねを用いて行うことができるが、経路を傾斜させ、重力によって、パッケージを経路に沿ってピボット部材の方に向かって移動させることが好ましい。
ピボット部材は、第1の位置において、追加のパッケージを受け取るのを阻止するように構成されることもできる。この構成は、ピボット部材がパッケージを充填される第3の位置を必要とし、パッケージは両側から持上げられてピボット部材に充填される。しかし、ピボット部材は第1の位置でパッケージを受け取ることができるように構成されることが好ましい。
ピボット部材は、好ましくはフロントアーム及びリアアームを含むものであり、フロントアームは、第1の位置においてパッケージの排出を防ぎ、第2の位置においてパッケージが排出されるように十分に引っ込むようなものである。第2のアームは、好ましくは、第1の位置において格納し得るものである。結果として、この構造はエスケープメント機構に多少類似したものであることを理解されたい。
排出手段は、様々な適切な作動手段、例えば、モータ、電磁石、ソレノイドなどによって動作し得る。しかしながら、本出願人は特に利便性が高く、かつ簡素な構造を発明した。好適な実施形態では、排出手段は、熱応答する作動手段によって動作させる。熱応答作動手段は、それが異なる形状を構成するように加熱し、それによって、排出手段を移動させるように備えられる。熱応答作動手段は、単に構造体が膨張することによって必要な動作を得ることができるようなものを含み、それは例えば、バイメタル素子である。好ましくは、それは形状記憶材料を含む。そのような材料は良く知られたものであり、所定の温度まで加熱されると事前に形成された形状を構成するという特性を持っている。一部の樹脂もこの現象を示すが、本発明では形状記憶合金を使用することが好ましい。加熱手段は、形状記憶合金素子を自己加熱させるように、少なくとも形状記憶合金素子の一部に電流を通過させる手段を含むようなものであることが好ましい。
排出手段、例えば、好ましくはピボット部材は、重力によって待機位置に戻るように、又は能動的に待機位置に移動するように構成し得る。しかし、ピボット部材は待機位置に弾性的に付勢されることが好ましい。ピボット部材を備える好適な実施形態では、待機位置は第1の位置とも呼ばれる。
上述したような経路の排出手段は、先に説明した本発明の第1の特徴の好適な実施形態であることを理解されたい。
また別の排出方法では、経路内の複数のパッケージに、経路の後端、即ちパッケージが入れられる方の経路の端部から、圧力をかけることもでき、ある種の保持力を制して、最前部のパッケージが排出されるようにする。この構造は、故障が発生した際に有用であり、保管及び取り出しデバイスが、経路からパッケージを排出するため、所定の経路に必要な圧力をかけることができるように構成し得る。これによって、故障が発生した場合、アウトプット速度は遅くなるが、装置は継続して動作し得る。
本質的ではないが、本発明の経路領域内の経路は、一般に、経路からパッケージを排出しやすくするように、前方に向かって傾斜していることが好ましい。これは経路領域の下部後方に未使用の空間を作り出すことを理解されたい。このため、本発明の別の好ましい特徴は、第2の領域、即ち、経路領域の下部後方に、本発明の装置の第1の領域で用いられるような種類の棚を備えられることを含むことである。これはコンパクトな構成をもたらすという利点があり、小規模な範囲に設置する場合に有用であり得る。これは経路領域が、一般の棚に単に近接して配置された独立モジュールとして備えられることが開示されたWO03/010073に記載の構成に対して、更なる相違をなす特徴であることを理解されたい。
このデッドスペースの別の使用法は、そこに搬送手段を提供するものであり、それによって、少なくとも一部の好適な実施形態では、本発明の搬送手段が、経路領域のすぐ下に備えられるようになる。また別の使用法では、デッドスペースは、パッケージを最終搬送地点まで搬送するためのディスペンシング・シュートを備えるように用いられることもできる。
さらなるデッドスペースの好ましい使用法は、第1の領域の棚用にアウトプット・シュートを備えることである。特に好ましくは、アウトプット・シュートは、経路領域の搬送手段の上にパッケージを搬送するように構成される。これは搬送及び/又はリフト手段に関して上述したようなバッファとしての効果が、棚全体に適用されるようにする。アウトプット・シュートは、第1の領域の棚用のメインアウトプット・シュートの代わりをなすこともできるが、好ましくは、追加で加えられるものである。実際、さらに一般に、第1の領域の棚用に複数のアウトプットを備えることが好ましい。このことは、保管及び取り出しデバイスが移動すべき平均距離を最小限にし、その動作速度が速くなるようにするので有用である。
上述したように、本発明では、保管及び取り出しデバイスが経路領域の経路を満たすように使用され、同一のパッケージが迅速にアウトプットされるようにすることを理解されたい。
従来の自動化薬局のロボットアームは、各パッケージの棚の位置を記憶したデータベースを有するコンピュータによって制御されている。本発明の経路領域は、中央データベースが、経路領域に保管されて、その後経路領域から払い出される各パッケージの記録を保存するようなシステムに、容易に組込まれることもできる。しかしながら、これは潜在的にある程度の複雑さをもたらす。例えば、従来の自動化薬局の棚は、一般に、各区域にあるパッケージは1つだけであるのに対して、この経路システムでは、通常、各経路に複数のパッケージがあり得るため、制御ソフトウェアに問題が発生し得る。同様に、経路は通常先入れ先出し(FIFO)システムであり、制御ソフトウェアが容易に要求を満たすことができないこともある。第3に、経路領域内に保管された売れ筋の商品は必然的に、メインデータベースの呼び出しを頻繁に要求するため特に不利である。
好適な実施形態によっては、装置は、保管及び取り出しデバイスと、各経路又はその経路のグループとの間で通信を可能とするように構成された通信手段を含んでいる。適切な手段には、無線、マイクロ波、超音波又は視覚的なライト、又は、好ましくは、赤外線送信を含む。実際に通信される情報は、特定の実施手段に適合するように構成されることもできるが、経路に入れられるパッケージ、所定の経路に保持されたパッケージの数量及び/又は種類、エラーコードなどに関する識別情報を含み得るものである。したがって、このような通信は、少なくとも売れ筋の商品の在庫数の管理を、局所的に管理できるようなものであって良く、即ち、中央データベースから遠隔的に管理するものであって良い。例えば、所定の種類のパッケージが、第1及び第2の領域の両方に保管されている場合、新たに入れられたパッケージをどちらの領域に保管するか決定することを可能にし得る。
そのような構成は、それ自体が新規で独創的である。従って、本発明の更なる特徴は、複数の別体の保管領域と、前記保管領域にパッケージを入れるための充填手段とを備える、複数のパッケージを保管及び払い出すための装置を提供することであり、装置は更に、充填手段と、各保管領域との間で情報を伝達するための手段を含むものである。保管領域は、好ましくは経路である。
経路は、保管及び取り出しデバイスに情報を伝達し得る。例えば、経路の在庫数に関して、経路が一杯になるまで満たされている場合、パッケージを異なる経路に置くように、保管及び取り出しデバイスに指図する。実際、各経路はメモリを備えることもでき、メモリにその経路自身の在庫情報を保存し、その在庫品が経路から払い出されると、保管及び取り出しデバイスによる補充を要求するようにする。好適な実施形態によっては、各経路は、バッテリなどの電源を各々備えている。
適宜使用し得る別の有用な特徴は、故障が発生した際に、装置を手動で操作する利用者が見られるような表示手段を、経路領域内の各経路に備えることを含むことである。この特徴の好ましい実施例では、各経路のライトを単に点灯させ、所定の注文を満たすため、そこからパッケージを取出すべきことを示す。また、液晶ディスプレイ(LCD)などのディスプレイを備えることもできる。これは、経路領域の排出システムが機能しなくなったとしても、利用者はどの経路からパッケージを取り出すかを知らされ、かつ経路の実際の内容物を見る必要がないため、注文を手動で迅速に満たすことができるようにする。当然のことながら、この視覚的手段を用いて、より複雑な情報、例えば、誤操作、所要の在庫、パッケージの実際数量と計画数量との不整合、在庫数の減少などの情報を利用者に伝達することもできる。実施例を1つに限定するものではないが、1組のLED、例えば、赤色と緑色のLEDが備えられ、2つのLEDの点灯又は点滅速度によって、複数のメッセージを伝達し得る。
経路領域内の経路は、通常、適切な命令の受信によって、経路の前方からパッケージを自動的に払い出すように構成される。好ましくは、各経路は、例えば、故障発生の際などに用いる、手動排出を可能にするような手段を備えるものである。これは通常の払い出し機構と関連するようにすることもでき、経路の前方にてパッケージの取り出しを可能にし得る。しかし、本出願人は、経路内のパッケージを、経路の後方から手動で取り出せるような手段を備えることが有益であると考え、それを実現した。これは、空間の使用効率を最適化するために通常小規模な範囲に配置される経路領域の前方の空間に、利用者がアクセスする必要がないことを意味する。経路領域の後方は、通常、保管及び取り出しデバイスを動作させるための空間を必要とするため、経路領域の前方より大きな空間がある。
経路領域内の経路は、固定的な寸法を有するものであって良い。これらは全て同一である必要はなく、経路の各寸法は、通常供給されるパッケージの大きさに適合するように選択されて良い。しかしながら、好適な実施形態によっては、少なくとも経路の一部は、少なくとも1つの寸法を変更することができる。好適な実施例では、経路の幅を変更することができる。これは所要の要求に従って変更し得る所定の経路の内容物に関して、大きな柔軟性を与える。経路の寸法調整は手動で実施されることもでき、例えば、各経路のディスプレイ手段が、調整が必要であること及び可能であれば調整の量を表示する。しかし、経路の寸法を自動的に変更するような手段が備えられることが好ましい。例えば、小型サーボモータが調整を行うために備えられることもできる。これは所定の経路の内容物を動的に割り当てられるように、調整を頻繁に行えるようにするという利点がある。
経路調整の制御は、中央コンピュータから指図されて良く、同様に、上述したような保管及び搬送デバイスと、経路自身との間での通信によって制御されても良い。例えば、保管及び取り出しデバイスが、保持しているパッケージの大きさに関する情報を経路に伝達し、経路はその大きさに従って調整を行えるようにする。
本発明の装置の好適な実施形態の有用な使用法に、全ての処方箋の注文が同時に必要とされるような特定の注文を、一時的に保持するように一部又は全ての経路を用いるようにするものがある。処方箋の注文は、しばしば妥当なレベルの事前通知をもって与えられる。なぜなら、処方箋は定期的に繰り返されるものであるため、又は顧客が処方薬を集めに戻ってくる傾向にあるためである。これは全ての処方薬を1つ又は複数の経路に集めて保管し、実質的に同時に払い出すことができるようにする。このような使用法は、経路寸法の好適な自動調整に特に有益である。なぜなら、一時的に保持する目的で使用される経路に保管されるパッケージの種類を迅速に変更し得るからである。
従来の自動化薬局では、通常、パーソナルコンピュータ(PC)などの1つのマイクロコンピュータによって1つのロボットアームが制御されている。従来の自動化薬局は、装置が大型化すればするほど、より多くの人によって操作されるようになることがボトルネックとなっている。本発明の更なる特徴は、複数のパッケージの物理的な位置を記録するデータベースと、パッケージの注文を処理するための中央モジュールとを備える自動化薬局を操作するためのコンピュータシステムを提供することであり、コンピュータシステムは、複数のユーザインタフェースモジュールを含むものであり、各々が、注文のアップロード及びその注文の状態の監視を可能にするような注文処理モジュールと相互作用するように構成される。
従って、このモジュールでは、複数のオペレータがシステムを同時に使用して良く、中央モジュールが注文を処理し、個々のオペレータが各々の注文の状態及び好ましくは処理中の全ての注文を見ることを可能にする。これは従来の単一システムと比較して、所定の装置を用いることによって著しく作業を効率的にできるようにする。注文処理モジュールは、より効率的な操作を可能にするようなアルゴリズムによってプログラムされることもできる。例えば、好ましくは、自動化薬局が、本発明の第1の特徴に基づく経路領域を備えるものである場合、中央モジュールは、受注済みの他の注文を考慮して、保管及び取り出しデバイスと、経路との間で注文を配分するようなものであって良い。
以下に説明する本発明の実施形態は、複数の医薬品パッケージを保管し、注文に応じてそれらを払い出すような、当該技術分野では一般に良く知られた種類の自動化薬局システムに関するものである。以下に記載する様々な素子の寸法及び他の物理的特性は、この使用法から推測されるものである。
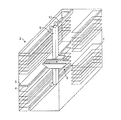
図1は、第1の領域、一般に、一般の棚領域であり(一般に符号2で示される)、通路の両側に内側を向くように備えられ、垂直方向に離隔して設けられた複数の細長い棚4を含むものである。パッケージが薬局で受け取られたとき、それを置くためのコンベヤーベルト5が備えられており、パッケージはそこから取り出され、棚4に配置されるようにすることもできる。このコンベヤーベルトは棚領域2の長さにわたっており、システムが払い出しの注文を満たすことに使用されていないとき、複数のパッケージが一度にシステムに入れられ、その後それらが棚4に配置される。この図では説明を容易にする目的で透明なものとして図示しているが、棚4及び棚後方にある通路の側壁は、通常、パッケージが通り抜けてしまわないように少なくとも十分に閉じられている。
通路両側の2つの棚4の間に、ロボットアームアセンブリ6が備えられている。アーム6は垂直な梁8に取り付けられており、摺動台車が、垂直な梁8を上下に移動し、棚4と水平方向に近づいたり離れたりすることができるように備えられている。垂直な梁8は、水平方向に延在する一対のガイドレール10に、並進摺動動作をするように取り付けられる。従って、その構成は、ロボットアーム6がx、y又はz軸方向に自由に動くことを可能にする。さらに、垂直な梁8に取り付けられたアームアセンブリ6は、両側の棚4にアクセスすることができるように、180度の回転動作が可能である。アームアセンブリ6は、このように、棚領域2のどの部分にもアクセスすることができる。図示していないが、当該技術分野では良く知られているように、アームアセンブリ6は一対のかみ合い部を備え、パッケージを移動させるため、かみ合い部は開閉及び上下動し得る。この図ではロボットアーム6は単に図式的に示されているが、実際には、様々な大きさ、形状及び重量のパッケージを、棚4から取り出し、別の場所に移動し、その後排出することができるような、当該技術分野では公知の様々な種類のものであって良い。
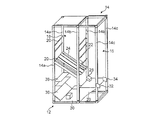
図1では、手前側の側壁の一部に一般の棚4が存在しないことを注意されたい。代わりに、本発明では、この領域は頻繁に要求されるパッケージ、即ち「売れ筋の商品」と呼ばれるパッケージ用の第2の領域、即ち、経路領域が備えられる。経路領域の構成要素の一部が、図2に図式的に示されている。
図2を参照すると、経路領域(符号12で示される)は、一般に、前部16及び後部18を画定する外枠14を含むものであり、後部18は、前部16と同じ幅だが、前部16より多少奥行きが深いことが示されている。
枠14は、3組の平行な垂直支柱14a、14b及び14cを含み、各々、枠の後部、中間部、前部にある。一連の水平交差部材20が、後部の垂直支柱14aの間に延在する。同様の水平交差部材22が、中間部の垂直支柱14bの間に延在する。
近接して配置された一連の経路構造体24が、後部交差部材20の1つと、中間部交差部材22の1つとの間に延在する。経路構造体24を支持する中間部交差部材22は、対応する後部交差部材20より低い位置にあり、経路構造体24を、例えば、略30°の角度をもって後部から前部に下向きに傾斜させるようにする。説明を容易にするため、図2では、経路24の1つの層だけを示しているが、実際には、異なる高さにて複数の層が平行して備えられて良い。従って、実際には枠の後部18の容積の大部分は、複数の平行な経路24で占められる。
経路24の低い方にあるその前端は、経路領域12の前部16に通じている。前部16は、一般に、広い空間であるが、経路24から落下するパッケージ28の、落下による衝撃を和らげるため、例えば、枠を横断するように引き伸ばされた1つの繊維からなる緩衝プラットフォーム26を下部に備える。緩衝プラットフォーム26は、経路領域の後部に向かって下向きとなるように角度が付けられており、モジュールの後部18の下部において、経路24の層の直ぐ下の下方に備えられたコンベヤーベルトの上に、パッケージ28がゆっくりと落ちるようにする。コンベヤー30は、横方向ならどちらの方向にも動作可能であり、パッケージ28が、モジュール12の左右どちらかに搬送されるようにする。
1組の赤外線トランスミッタ及びレシーバ32、34が、前部垂直支柱14cの緩衝プラットフォーム26のすぐ上の位置に備えられ、各経路アセンブリ24に対して及び各経路アセンブリ24から、信号を送信及び受信する。その詳細は後述する。コンベヤー30の後方に、傾斜したシュート面36及び複数の追加の棚38がある。その目的は後述する。このように、傾斜した経路24によってできた下部後方の空いた空間を、追加のアウトプット・シュート36及び追加の棚38を取り付けることによって、有効利用していることを理解されたい。
図2の経路モジュール12は分離して示されているが、実際には、上述したような棚領域2内のスペースに配置される。さらに、必要に応じて、経路モジュールが棚領域2に近接して配置されることもできる。
図3、4及び5は、経路アセンブリ24に使用し得る1つの構造の詳細を示している。図3及び4は、各々、経路の前方及び後方から見た図であり、全ての主要な特徴が容易に見られるように短縮遠近法で示している。各経路24は、細長いベース部材40を含み、前部及び後部交差部材20、22に固定されている。ベース部材40は、一対のL字形側壁部材42を支持する。各側壁部材42は、水平に延在する2つのアーム44を有し、その拡大図が図5に示されている。図5で示されるように、アーム44は、歯車の歯48と係合する鋸歯状のエッジ46を備え、ダブルラック及びピニオン駆動方式で、アーム44を反対方向に水平に平行移動させる。これは2つの側壁42を容易に同時に移動させることを可能にし、異なる大きさのパッケージに適合するべく経路の幅を変更するように2つの側壁42が動作し得る。側壁は、オペレータによって手動で調整されるようにすることもできる(即ち、サービスエンジニアを必要としない)、又はロボットアーム6によって移動されるようにすることもできる。別の実施形態(図示なし)では、歯48はサーボモータと置換され、経路が自動的に調整されるようにすることもできる。
経路24の前部に、ワイヤを立てるようにして配置されたパッケージストッパ50があり、パッケージが経路の前端から滑り落ちないようにする。パッケージストッパ50のすぐ後ろに排出フラップ52があり、フラップの上にあるパッケージを立たせるように起こすことによって、パッケージストッパを押し倒すように動作可能であるため、パッケージを経路の前端から滑り落とせるようにする。
排出装置52のすぐ後ろにパッケージ検出器54があり、パッケージストッパより後方の経路前部にパッケージがあるとき、そのパッケージを検知することができるようにする。同様の検出器56が経路の最前部に備えられ、払い出されたパッケージの通過を検出できるようにする。第3のパッケージ検出器58が経路の後部にあり、経路の後部に新たに進入したパッケージの検出ができるようにする。
また、利用者が押すと排出装置52を動作させられる手動排出ボタン60及び停電が起きた際に、手動で排出装置52を操作できるようにする機械式の排出レバー62を経路の後部に備えている。手動操作用のノブ60、62は、このように、様々な故障が発生したとき、利用者が、通常、経路の前端からパッケージを排出することを可能にする。図1の参照に戻ると、経路の後方から排出機構を手動で動作可能にすることは、利用者が装置の前方にアクセスする必要がなくなるため有用である。経路モジュール12が設置されると、その後ろには、ロボットアーム6を動作させるために必要な、十分な大きさの空間が存在する。
図3に戻ると、発光ダイオード(LED)64が経路アセンブリ24の前面にあり、装置の故障が発生したとき、所定の注文を満たすため、パッケージを取り出すべき特定の経路であることを利用者に表示するように用いられる。表示用LED64の隣に赤外線エミッタ及びレシーバ66があり、通常の使用時に、排出命令を受信するため及び状態情報を返信するため、経路アセンブリ24を中央コンピュータと通信させる手段である。
赤外線エミッタ及びレシーバ68が、経路アセンブリ24の後端に備えられ、例えば、保守整備の間、又は故障が発生したとき、経路24と直接通信することを可能にする。他の実施形態では、ロボットアーム6と所定の通信をするために用いられることもできる。経路の後端面には表示用LED70が備えられ、経路前面のLED64と同様な動作を行い、パッケージが後方から取り出される又は選択されることができるようにする。しかしながら、このLED70は、独立した赤色及び緑色の素子を含み、点灯及び異なる速度での点滅の様々な組合せによって、複数の操作メッセージを利用者に伝達することができ、例えば、取り出されるパッケージを示すメッセージだけではなく、パッケージを入れる必要があること、複数のパッケージを入れる必要があること、在庫がほとんどない又はないこと、入力又は出力エラーがあること、又は経路の在庫が本来あるべき数より多い又は少ないことなどを示すメッセージがあり得る。当然のことながら、特定のメッセージ及び表示形式が、所定の実施形態に適合するように、利用者によって選択されることができることは明らかである。
最後に、経路の後面は経路識別デバイス72を備え、ロボットアーム6からの問い合わせ信号に応じて、経路を識別する信号を送信するように構成される。これはロボットアームが、それが正しい経路であるかどうか確認することを可能にする。
上述したような実施形態の動作を以下に説明する。動作時には、医薬品パッケージが、適切な投入地点(図示なし)にてシステムに入れられる。ロボットアーム6は、次に各パッケージを1つずつ把持し、適切な識別情報を制御コンピュータに送信し、制御コンピュータは、そのパッケージを配置する場所を教える命令をロボットアーム6に返信する。別の構成では、利用者がパッケージをスキャンするステップを実行し得る(いわゆる半自動モード)。ここで説明する本発明の実施形態では、パッケージは一般の棚4の1つに配置し得る。また、しかしながら、パッケージがいわゆる「売れ筋の商品」の場合、経路モジュール12の経路24の1つに配置されることもできる。ロボットアーム6は、まず経路識別信号を受信するために経路24に問い合わせを行い、それが正しい経路であることを確認する。次に、パッケージを経路24の後部の最上部に配置して、経路に何もない場合、パッケージがパッケージストッパ50まで経路を滑り降りるようにする、又は経路に既に複数のパッケージが存在する場合、パッケージがその複数のパッケージの後方まで経路を滑り降りるようにする。アーム6は、必要に応じて経路24の幅を調整して良く、経路24の側壁42の1つを移動させる。中央コンピュータを介して、又は別の実施態様では赤外線トランスミッタ/レシーバの構成68を用いて、パッケージを追加するための空間があるかどうか(例えば、最後部のパッケージ検出器58が覆われているかどうか)、経路を確認し得る。
特定のパッケージの要求を受信すると、この要求は中央コンピュータによって処理され、それが売れ筋の商品ではない場合、棚4から取り出すようにロボットアームに命令を出す、又は売れ筋の商品であった場合、コンピュータは、経路モジュール前方にある赤外線トランスミッタ32(図2)から経路前部のレシーバ66へ赤外線信号を送信することによって、適切な経路24に払い出し指示を送信する。この指示は、パッケージを立たせるように起こすことによって、パッケージがパッケージストッパ50を押し倒すように排出装置52を動作させる。パッケージ38は、経路の端部から緩衝領域26の上に落下し、更にそこからコンベヤー30の上に落下する。複数個のパッケージが頻繁に要求されるパッケージの場合、複数の経路がそれを保管するように用いられることもでき、そのパッケージを複数の経路から同時に払い出すことによって、複数のそのパッケージを要求する注文が、迅速に満たされるようにすることもできる。
処方箋を満たすために追加のパッケージが要求される場合、これらが経路モジュール12から、又は適切な棚4、38からパッケージを取り出すことができるアーム6を用いて、同時に払い出されることもできるようにし、経路モジュールのアウトプット・シュート36の上にそれらを置くようにする。処方箋の全てのパッケージがコンベヤー30の上に払い出されると、この装置は、それらを搬送シュートなどに搬送するように動作し得るので、各パッケージが搬送地点まで個別に搬送される場合と比較して、注文者はより迅速に全てのパッケージを受け取ることができる。
経路モジュール12の一部故障、例えば、主電源の損失が発生した場合、手動の電気式又は機械式排出装置60、62を用いて、人間の手又はロボットアーム6によって医薬品を払い出し続けられるようにすることもできる。さらに、これは医薬品パッケージの取り出しが必要な経路のLEDを点灯することによって著しく容易になる。LEDは電流消費が極めて少ないため、予備バッテリから電源を供給し得る。これによって、オペレータは経路24内のパッケージを自分自身で見る必要がなくなる。
本発明の更なる実施形態が図6に示されている。この実施形態では、4つの別体の経路モジュール74−80が備えられ、全ての経路モジュールは、図2を参照して説明した経路モジュール12とある程度の相違を有する。内側のモジュール76、78に備えられた経路アセンブリは、第1の実施形態の経路アセンブリと同程度の大きさであり、2つの外側のモジュール74、80は、それよりさらに長い経路アセンブリ82を備えている。外側モジュールの長い経路82は容量が大きいことから、売れ筋の商品に特に有用である。
第1の実施形態と比較すると、個々のモジュール74−80は、各々コンベヤーシステムを備えておらず、全てのモジュールが、モジュールの前方又は下方に配置された共通のコンベヤーベルト86を使用する。長い外側経路82は、経路の向かい側に配置されている各緩衝プラットフォーム88を用いて、コンベヤー86の上にパッケージを供給する。短い内側経路84用に、同様の緩衝プラットフォームが、これら経路の端部の直ぐ下に備えられているが、これらは説明を容易にするため、図から省略されている。4つのモジュール74−80を含む経路領域全体は、スクリーン90によって保護されており、パッケージが装置から飛び出してしまうことを防止する。
第1の実施形態のように、ロボットアーム用のアウトプット・シュート92が、モジュール74の1つの下部に備えられているが、当然ながら、この実施形態ではコンベヤー86がモジュールの前方にあるため、その長さは第1の実施形態のものよりも長い。シュート92は、図ではモジュールの1つだけに示されているが、実際には、全てのモジュールが同様なシュートを備えている。これは一般の棚からパッケージを取り出して、アウトプット・シュートに配置するまでの移動に必要な、ロボットアームの平均移動距離を短くするため有用である。また、第1の実施形態と同様に、いくつかの追加の棚38が、傾斜した経路82、84の下方のデッドスペースに備えられる。
図7は、図1に示す一般の棚4のない部分に、図6の経路領域が組込まれているところを示している。パッケージ28がコンベヤー86で搬送されることに関して、この実施形態の動作は、第1の実施形態と全く同一であるため、ここではその説明を繰り返して行わない。また、コンベヤー86は、好ましくは、バッファとして機能することができるものであり、1つの注文で要求される全てのパッケージを一緒に集める。従来、パッケージは次のパッケージの移動が開始される前に、最終搬送地点まで搬送される必要があると考えられていたため、各パッケージは個別にアウトプットされていた。その場合と比較して、これは全部のパッケージがまとめて利用者にアウトプットされるため、アウトプット速度を著しく向上させる。
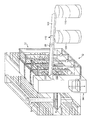
リフトシステムが新たに図7で示されている(一般に符号94で示される)。リフトシステムは、リフティングプラットフォーム96を広く含むものであり、リフトシャフト98内部で、垂直に、シャフトのベースから2つの上方の開口100、102まで駆動される。小型のコンベヤーベルト104が、リフティングプラットフォーム96のベースを形成している。プラットフォームは、側壁を有していても良く、有していなくても良い。そして、必要に応じて、経路領域のコンベヤー86と対向する側面及び開口100、102と対向する側面の両方に、各々ドアまたはゲートを備えても良い。図に示されているように、動作時には、リフティングプラットフォーム96のコンベヤー104が最も低い位置にあるとき、固定的な搬送手段86の上にあるパッケージが、コンベヤー104の上に搬送され、次にベースコンベヤー104が開口100、102の1つと同じ高さになるまで、リフティングプラットフォームが上昇させられる。ベースコンベヤー104の上のパッケージは、次に、パッケージを前方に移動して、プラットフォーム96から出ていくようにコンベヤーを動作させることによって、容易に、各開口100、102と結合した搬送シュート又はスライドの上に排出されるようにすることもできる。
本発明の更なる実施形態が図8に示されている。実際のところ、この実施形態は、図1に示す一般の棚領域に、図2に示す経路モジュール12を単純に3個組み合わせたものである。リフトモジュール94は、図7を参照して説明したものと同一であり、経路領域の一方の端部において示されている。また、この実施形態では、搬送コンベヤー106が明示されており、2つのリフトの開口のうち上側の開口102と結合している。搬送コンベヤー106は、2つのらせん状(スパイラル)の最終搬送シュート108、110にパッケージを供給する役割を果たし、コンベヤー106の通路を横断するように備えられたスイング式の切替バー112は、特定のパッケージ38を、どちらの搬送シュート108、110に落下させるかを選択可能にするものである。
リフトモジュールの複数のアウトプット100、102は、しかし、搬送経路の選択をする必要がないため、下流側のコンベヤーシステムの単純化を可能にする。これは制御ソフトウェアがより単純になるようにし、全体のアウトプット速度を速くすることも可能にする。
図9−13は、リフトモジュールの様々な異なる構造を示している。まず図9を参照すると、本発明に使用し得るリフト構造の図式的な断面図が示されている。この構造では、リフティングプラットフォーム114は、シャフト116内部で垂直方向に動作するように吊るされている。シャフト116は、コンベヤーの所定領域に、下部入力用開口118を備え、上方には、パッケージをアウトプットするための3つの開口122、124、126を備えている。3つの開口は、当然のことながら、単純に実施例としてあげただけであり、必要に応じて様々な数の開口が備えられて良い。リフティングプラットフォーム114は、各モータ132、134によって駆動される、2つの独立して駆動するロープ又はベルト128、130で吊るされている。ロープ128の一方は、プラットフォーム114に直接結合され、ロープ130の一方は、壁部材136に結合されている。壁部材136は、ちょうつがいで動作可能なようにプラットフォーム114に取り付けられている。
使用時には、パッケージ38はコンベヤー120によって届けられ、入力用開口118を介して搬送され、そこから、リフティングプラットフォーム114及び側壁136によって形成される楔形のバケツに落下する。所定の注文の全てのパッケージ28が集まると、2つのモータ132、134がプラットフォーム114を上昇させるべく作動される。プラットフォームが所望の出口用開口、例えば、図9で示される3つの開口のうちの2番目の開口124に到達すると、左手側のモータ132は停止されるが、右手側のモータ134は継続して作動し、対応するロープ130の長さを更に短くする。それによって、プラットフォーム114は、パッケージ38が、出口用開口124を介して、プラットフォームからコンベヤー又はシュートの上に滑り落ちるまで傾けられる。このように、リフト手段がバッファとして機能して良いことを理解されたい。
図10で示すリフト構造は、プーリーが最上部に備えられたプーリー付シャフト136、138の下部にモータ132、134が配置されていることを除き、図9のリフト構造と類似している。この構造は、保守整備の際にモータ132、134に容易にアクセスすることができるようになる点で有用であり得る。また、プラットフォームと、アウトプット用開口との間が近接した状態を維持し得る。
更なるリフト構造が、図11及び図12に示されている。この構造では、パッケージを収容するように、コンベヤーベルトのベース及び3つの傾斜した側壁142からなるリフト用「バケツ」が、傾斜したコンベヤーベルト140に形成されている。図11の図の下部では、パッケージ28を、棚領域のコンベヤーからバケツに受け取るような構成が示されている。バケツは、次に2つの出口用開口146、148のどちらか1つの高さまで上昇されて良く、コンベヤー140が、パッケージをシュート内に又は次のコンベヤーの上に排出するように動作する。
更なるリフト構造が図13に示されている。この構造では、リフトボックス150は傾斜した床152を備えるものであり、モータ156により作動されるローラ式シャッタ154によって前方が閉じられる。図13の図の下部で示されるように、シャッタ154が下ろされると、ボックス150の最上部に開口ができ、パッケージがその中に入るようにする。リフトボックス150は、次に上方の高い位置まで上昇され、シャッタ用モータ156を作動させてシャッタを上げることによって、リフトボックス150に収容されたパッケージが、傾斜した床152を滑り落ちるようにする。
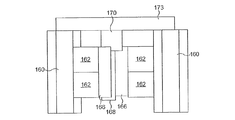
図14−19を参照すると、本発明で使用し得る様々なモジュールの様々なレイアウトが示されている。図14は、本発明で使用し得るレイアウトの1つを示している。このレイアウトでは、ロボットアーム(図示なし)が備えられる第1の一般の棚領域160が、薬局の幅にわたって延在している。一般の棚領域の一方の側面には経路領域が備えられ、経路領域は5つの経路モジュール162、164を含んでいる。モジュールのうちの2つは、通常の経路モジュール162であり、他の3つは奥行きの深いモジュール164である。奥行きの深いモジュール及び奥行きの浅いモジュールの実施形態は、図6及び図7を参照して説明した実施形態のようなものであり得る。
奥行きの深い各経路モジュール164の前方にはパッケージ落下領域166が備えられ、パッケージが着地する際の衝撃を和らげ、パッケージがコンベヤー168の上にのるように、パッケージを後方に向かって移動させるような役割を果たす。コンベヤー168は、5つのモジュール全てに共通のものであり、奥行きの深いモジュール164の下方、かつ奥行きの浅いモジュール162の前方に備えられている。コンベヤー168の両端には、各々2つの出口を有するリフトモジュール170が備えられている。この構成は、4つのオペレータステーション172のうちのいずれか1つが、適切なリフトモジュール170及びそのリフトの適切な出口に対して、特定の処方箋を指示することによって、装置よりパッケージが供給されるようにすることができることを意味する。
本発明に使用し得る別のレイアウトが図15に示されている。この構成では、コンベヤー168は、3つの経路モジュール162、162´の下方に備えられており、パッケージ落下領域166がモジュールの前方に備えられている。モジュール162、162´は、従って、図2を参照して説明したモジュールと類似したものである。しかしながら、この構成では、一般の棚160の領域には経路モジュール162が2つだけ備えられ、ロボットアームはこれらを満たすようにアクセスすることができることに注意されたい。第3のモジュール162´は、手動で満たされるように、後方から直接アクセスすることができるものである。これはシステムにパッケージを入れる全体入力速度を向上し得る。
図16は本発明に使用し得る別のレイアウトを示す。この構成では、2つの手動で満たされる経路モジュール162´が、一般の棚領域160のロボットアームで満たされる2つのモジュール162に対向して配置されている。対向する一対のモジュールは、各々パッケージ落下領域166を有し、パッケージを順に共通のコンベヤー168に移動させ、コンベヤー168は、それらを順にリフトモジュール170に入れる。この構成において空間を節約するため、全てのモジュール162及び162´用に、1つの落下領域を備え、上述したような実施形態のように、左端のモジュール162の下方にコンベヤーを備えるように変更することもできる。
図17は、図16の構成と類似したタンデムレイアウトを示しているが、第2の棚領域160及びそれに備えられているするロボットアームが、右端の経路モジュール162を満たすことを特徴とする。この実施形態は、2つの一般の棚領域160の間に追加のコンベヤー173を備え、在庫をその両者の間で移動させるようにする、又は棚領域160(経路モジュール162と対向している)から取出されたパッケージがリフト170の上に置かれるようにする。これは、例えば、パッケージがシステムのどこに保管されていたとしても、処方箋を満たすために必要な全てのパッケージをまとめて集めるように、リフト170をバッファとして機能させることから有用である。
図18は、ロボットアームが備えられている2つの別体の棚領域160が、各々2つの経路モジュール162にパッケージを供給するような構成を示しているが、上述したようなレイアウトのように、処方薬用のバッファとして機能し得る共通のリフト170が備えられている。また、この実施形態は、モジュール162の一端にコンベヤーを備えるように変更することもでき、その場合、その下部に本発明の好適な実施形態のモジュールを配置し得る。
最後に、図19は装置の保管部の構成を示しており、それは実際の薬局受付より上の階の床面に構成され、そこから医薬品パッケージの支給を要求される。この実施形態では、ロボットアームが備えられている棚領域160は、上述したような実施形態のように、2つの経路モジュール162にパッケージを供給する。しかしながら、上述したような実施形態とは異なり、コンベヤー168は、その両端において2つの孔174の1つにパッケージを供給する。2つの孔は床を貫通し、下の階の天井と同じくらいの高さに備えられている各コンベヤー176の上に通じている。各コンベヤーは、3つのらせん状(スパイラル)のシュート178にパッケージを供給し、シュートは、パッケージを取出せるような高さまで、パッケージを下方に下ろす。リフトモジュールが必要ではないため、この構成はコストを節約することができる。
スイング式の切替バー180が、コンベヤー176の上に備えられており、目的のシュートが正しく選択されるようにする。よって、この実施形態では6人のオペレータが、各自それぞれの場所でパッケージを受け取ることができる。
図20は、本発明に基づく経路200の更なる実施形態を示している。この実施形態では、経路200は、図3乃至5を参照して上述したような主要部材202を広く含み、そして付属部材204も含むものである。主要部材及び付属部材202、204は、1組のレール206に取り付けられており、レールに沿って手動で摺動可能であることから、互いに近づけたり、離したりすることによって経路の幅を調整し得る。この調整量は、LED70によって表示することもでき、LEDの点滅を適切に組み合わせることによって表示し得る(例えば、幅が広い場合は赤色、幅が狭い場合は緑色を用いる)。パッケージ検出器54−58、排出ボタン60、62、赤外線検出器及びレシーバ68、表示用LED70及び経路識別装置72は、上述したものと同じものである。
しかし、この実施形態は、異なる排出機構208が組込まれているため、その詳細を図21a及び21bを参照して説明する。排出機構208は、経路202に対してピボット可能に取り付けられたフード形状をした部材210を含むものである。ピボット部材210は、ベースプレート212及び直立した壁214を備えている。シャフト216は、ベースプレート212から下方に延在し、その下端がピボットの支点として用いられる。シャフト216は、ピボットの支点より上方に形状記憶ワイヤ218の一端が取り付けられている。ワイヤ218の反対側の一端は、経路本体202に固定されている。また、シャフト216はピボットの支点より上方に保持スプリング220が取り付けられている。
図21aは、通常の待機位置を示しており、ベースプレートは、実質的に経路本体202の上側の面と同一平面上にあり、パッケージ222aは、端壁214に支えられるようにしてベースプレートの上に受け止められている。電流が形状記憶ワイヤ218を通過すると、その電気抵抗でワイヤは加熱され、次にワイヤはその「加熱した」元の形状に戻り、放熱状態の形状と比較して直線状に長く伸びた形状となる。このようにワイヤが伸びると、その伸びがピボット部材のシャフト216に伝達され、ピボット部材を前方に傾かせるようにする。これは最前部のパッケージ222aを傾斜した経路の端部から滑り落とし、それが排出されるようにする。しかしながら、同時に、ベースプレート212の後端が上方に上がるため、後ろのパッケージ222bはピボット部材210の上に移動することができず、排出もされない。
ワイヤ218への電流の供給を止めると、ワイヤは再び収縮し、スプリング220の付勢によって、ピボット部材210はその待機位置に戻る。これは次のパッケージ222bがピボット部材210の上に移動して受け止められることによって、次の排出ができるような状態にする。従って、パッケージを、簡単に、確実に、1つずつ排出することができるようになったことを理解されたい。
上述したような実施形態は単なる実施例であり、本発明の範囲内で様々な変形が可能であることは、当業者には明らかであろう。