JP2006344685A - 露光装置 - Google Patents
露光装置 Download PDFInfo
- Publication number
- JP2006344685A JP2006344685A JP2005167353A JP2005167353A JP2006344685A JP 2006344685 A JP2006344685 A JP 2006344685A JP 2005167353 A JP2005167353 A JP 2005167353A JP 2005167353 A JP2005167353 A JP 2005167353A JP 2006344685 A JP2006344685 A JP 2006344685A
- Authority
- JP
- Japan
- Prior art keywords
- stage
- actuator
- control
- control signal
- exposure apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/708—Construction of apparatus, e.g. environment aspects, hygiene aspects or materials
- G03F7/70858—Environment aspects, e.g. pressure of beam-path gas, temperature
- G03F7/709—Vibration, e.g. vibration detection, compensation, suppression or isolation
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/708—Construction of apparatus, e.g. environment aspects, hygiene aspects or materials
- G03F7/70808—Construction details, e.g. housing, load-lock, seals or windows for passing light in or out of apparatus
- G03F7/70833—Mounting of optical systems, e.g. mounting of illumination system, projection system or stage systems on base-plate or ground
Abstract
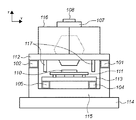
【解決手段】露光装置では、露光ビームを基板に投影する投影部を支持する第1構造体112と、第1アクチュエータを含み第1構造体112を支持する第1防振支持脚101から103と、基板を位置決めする基板ステージ111を支持する第2構造体113と、第2アクチュエータを含み第2構造体113を支持する第2防振支持脚104〜106と、第1アクチュエータ及び第2アクチュエータの少なくとも一方を制御することによって第1構造体112と第2構造体113との間の相対変位を低減する制御部201とを備える。
【選択図】図1
Description
本発明の好適な実施形態によれば、前記制御部は、前記原版ステージと前記基板ステージを同期駆動することが好ましい。
[第1実施形態]
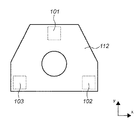
まず、図6〜図9を参照しながら本発明の好適な実施形態の露光装置の概略構成を説明する。ここで、図6は露光装置の正面図である。図7は露光装置の側面図である。図8は、例えば、投影部(例えば、レチクルステージ(原版ステージ)107、投影レンズ(投影光学系)109等)を搭載する第1構造体としての鏡筒定盤112の平面図である。図9は、例えば、ウエハステージ(基板ステージ)111等を搭載する第2構造体としてのウエハステージ定盤113の平面図である。
本発明の第2実施形態において、鏡筒定盤112とウエハステージ定盤113との同期制御以外は、第1実施形態に従い得る。
本発明の第3実施形態において、鏡筒定盤112とウエハステージ定盤113との同期制御以外は、第1実施形態に従い得る。
図10〜14は、本発明が適用された制御による効果の一例を簡単に示す図で、各構造体の変位の時間変化を示すものであり、図10は、6.25Hzの単一周波数(sin波)で第1構造体が振動しているときの変位の時間変化、図11は.6.25Hzの単一周波数で、第1構造体の振動との間に位相差を有することなく第2構造体が振動しているときの変位の時間変化、図12は、6.25Hzの単一周波数で第1構造体の振動に対して90°の位相遅れをもって第2構造体が振動しているときの変位の時間変化、図13は、6。25Hzの単一周波数で第1構造体の振動に対し、180°の位相遅れをもって第2構造体が振動しているときの変位の時間変化、図14は、図11〜13に示すように2つの構造体が振動している場合における第1構造体と第2構造体との間の相対変位を示すものである。
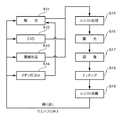
次に上記の露光装置を利用した半導体デバイスの製造プロセスを説明する。図15は、半導体デバイスの全体的な製造プロセスのフローを示す図である。ステップ1(回路設計)では半導体デバイスの回路設計を行なう。ステップ2(マスク作製)では設計した回路パターンに基づいてマスクを作製する。一方、ステップ3(ウエハ製造)ではシリコン等の材料を用いてウエハを製造する。ステップ4(ウエハプロセス)は前工程と呼ばれ、上記のマスクとウエハを用いて、リソグラフィ技術によってウエハ上に実際の回路を形成する。次のステップ5(組み立て)は後工程と呼ばれ、ステップ4によって作製されたウエハを用いて半導体チップ化する工程であり、アッセンブリ工程(ダイシング、ボンディング)、パッケージング工程(チップ封入)等の組立て工程を含む。ステップ6(検査)ではステップ5で作製された半導体デバイスの動作確認テスト、耐久性テスト等の検査を行なう。こうした工程を経て半導体デバイスが完成し、これを出荷(ステップ7)する。
Claims (16)
- 露光ビームによって基板に潜像パターンを形成する露光装置であって、
露光ビームを基板に投影する投影部を支持する第1構造体と、
第1アクチュエータを含み、前記第1構造体を支持する第1防振支持脚と、
基板を位置決めする基板ステージを支持する第2構造体と、
第2アクチュエータを含み、前記第2構造体を支持する第2防振支持脚と、
前記第1アクチュエータ及び前記第2アクチュエータの少なくとも一方を制御することによって前記第1構造体と前記第2構造体との間の相対変位を低減する制御部と、
を備えることを特徴とする露光装置。 - 前記第1アクチュエータは、前記第1構造体の振動を低減するように動作することを特徴とする請求項1に記載の露光装置。
- 前記第1構造体の状態を検出する状態検出器を更に備え、前記制御部は、前記第1構造体の状態に基づいて前記第1アクチュエータを制御することを特徴とする請求項1又は2に記載の露光装置。
- 前記第2アクチュエータは、前記第2構造体の振動を低減するように動作することを特徴とする請求項1乃至3のいずれか1項に記載の露光装置。
- 前記第2構造体の状態を検出する状態検出器を更に備え、前記制御部は、前記第2構造体の状態に基づいて前記第2アクチュエータを制御することを特徴とする請求項1乃至4のいずれか1項に記載の露光装置。
- 前記投影部は、原版を位置決めする原版ステージと、露光ビームによって原版のパターンを基板に投影する投影光学系とを含み、
前記露光装置は、
前記原版ステージの状態を検出する第1ステージ状態検出器と、
前記第1構造体に対して前記原版ステージを相対的に駆動する第1ステージアクチュエータとを更に備え、
前記制御部は、前記原版ステージの状態に基づいて前記第1ステージアクチュエータを駆動することを特徴とする請求項1乃至5のいずれか1項に記載の露光装置。 - 前記基板ステージの状態を検出する第2ステージ状態検出器と、
前記第2構造体に対して前記基板ステージを相対的に駆動する第2ステージアクチュエータとを更に備え、
前記制御部は、前記基板ステージの状態に基づいて前記第2ステージアクチュエータを駆動することを特徴とする請求項1乃至6のいずれか1項に記載の露光装置。 - 前記制御部は、前記原版ステージと前記基板ステージを同期駆動することを特徴とする請求項6に記載の露光装置。
- 前記第1構造体と前記第2構造体との間の相対変位を検出する相対変位検出器を更に備え、
前記制御部は、前記相対変位検出器から提供される情報に基づいて前記第1アクチュエータ及び前記第2アクチュエータの少なくとも一方を制御することによって前記第1構造体と前記第2構造体との間の相対変位を低減することを特徴とする請求項1乃至8のいずれか1項に記載の露光装置。 - 前記制御部は、前記第1アクチュエータの制御信号に基づいて前記第2アクチュエータの駆動信号を補正し、前記第2アクチュエータの制御信号に基づいて前記第1アクチュエータの駆動信号を補正することによって前記第1構造体と前記第2構造体との間の相対変位を低減することを特徴とする請求項1乃至9のいずれか1項に記載の露光装置。
- 前記制御部は、前記第2アクチュエータの制御信号に基づいて前記第1アクチュエータの駆動信号を補正することによって前記第1構造体を前記第2構造体に追従させることを特徴とする請求項1乃至9のいずれか1項に記載の露光装置。
- 前記制御部は、前記第1アクチュエータの制御信号に基づいて前記第2アクチュエータの駆動信号を補正することによって前記第2構造体を前記第1構造体に追従させることを特徴とする請求項1乃至9のいずれか1項に記載の露光装置。
- 前記制御部は、前記相対変位検出器から提供される情報に基づいて前記第1アクチュエータ及び前記第2アクチュエータの双方を制御することによって前記第1構造体と前記第2構造体との間の相対変位を低減することを特徴とする請求項9に記載の露光装置。
- 前記制御部は、前記相対変位検出器から提供される情報に基づいて前記第1アクチュエータを制御することによって前記第1構造体を前記第2構造体に追従させることを特徴とする請求項9に記載の露光装置。
- 前記制御部は、前記相対変位検出器から提供される情報に基づいて前記第2アクチュエータを制御することによって前記第2構造体を前記第1構造体に追従させることを特徴とする請求項9に記載の露光装置。
- デバイス製造方法であって、
請求項1乃至請求項15のいずれか1項に記載の露光装置を用いて潜像パターンが形成された基板を準備する工程と、
前記潜像パターンを現像する工程と、
を含むことを特徴世するデバイス製造方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005167353A JP2006344685A (ja) | 2005-06-07 | 2005-06-07 | 露光装置 |
| US11/446,117 US20070035713A1 (en) | 2005-06-07 | 2006-06-05 | Exposure apparatus |
| US12/334,707 US7768626B2 (en) | 2005-06-07 | 2008-12-15 | Exposure apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005167353A JP2006344685A (ja) | 2005-06-07 | 2005-06-07 | 露光装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006344685A true JP2006344685A (ja) | 2006-12-21 |
| JP2006344685A5 JP2006344685A5 (ja) | 2008-07-24 |
Family
ID=37641444
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005167353A Pending JP2006344685A (ja) | 2005-06-07 | 2005-06-07 | 露光装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US20070035713A1 (ja) |
| JP (1) | JP2006344685A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009004737A (ja) * | 2007-03-29 | 2009-01-08 | Asml Netherlands Bv | 可動物体の位置依存信号を測定するための測定システム、リソグラフィ装置および方法 |
| JP2014534607A (ja) * | 2011-09-09 | 2014-12-18 | マッパー・リソグラフィー・アイピー・ビー.ブイ. | フレキシブルカップリングを備えた投影システム |
| JP2015212932A (ja) * | 2014-04-14 | 2015-11-26 | キヤノン株式会社 | ステージ制御装置、加工装置、計測装置および露光装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006344685A (ja) * | 2005-06-07 | 2006-12-21 | Canon Inc | 露光装置 |
| JP2008256155A (ja) * | 2007-04-06 | 2008-10-23 | Canon Inc | 除振装置、演算装置、露光装置及びデバイス製造方法 |
| US7880861B2 (en) * | 2007-08-17 | 2011-02-01 | Asml Netherlands B.V. | Synchronizing timing of multiple physically or logically separated system nodes |
| JP5350139B2 (ja) * | 2008-10-01 | 2013-11-27 | キヤノン株式会社 | 露光装置、及びデバイスの製造方法 |
| NL2003453A (en) * | 2008-10-09 | 2010-04-12 | Asml Netherlands Bv | A positioning system, method, and lithographic apparatus. |
| NL2007633A (en) * | 2010-11-22 | 2012-05-23 | Asml Netherlands Bv | A positioning system, a lithographic apparatus and a method for positional control. |
| KR102653016B1 (ko) | 2018-09-18 | 2024-03-29 | 삼성전자주식회사 | 척 구동 장치 및 기판 처리 장치 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0729801A (ja) * | 1993-07-14 | 1995-01-31 | Nikon Corp | 走査型投影露光装置 |
| JPH08241126A (ja) * | 1995-03-02 | 1996-09-17 | Canon Inc | 同期位置制御方法および装置 |
| JPH0926828A (ja) * | 1995-07-13 | 1997-01-28 | Canon Inc | 位置制御方法及び装置並びにそれを使用した半導体製造装置 |
| JPH10256144A (ja) * | 1997-03-11 | 1998-09-25 | Canon Inc | 除振装置 |
| JPH11297587A (ja) * | 1998-04-08 | 1999-10-29 | Canon Inc | 露光装置およびデバイス製造方法 |
| JP2000349015A (ja) * | 1999-06-07 | 2000-12-15 | Canon Inc | デバイス製造装置および方法 |
| JP2001126977A (ja) * | 1999-10-27 | 2001-05-11 | Nikon Corp | ステージ装置および露光装置ならびに回路デバイス製造方法 |
| JP2003299340A (ja) * | 2002-04-03 | 2003-10-17 | Nikon Corp | 磁石ユニット、リニアモータおよびステージ装置並びに露光装置 |
| JP2004200218A (ja) * | 2002-12-16 | 2004-07-15 | Nikon Corp | 支持装置及びステージ装置並びに露光装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5699145A (en) * | 1993-07-14 | 1997-12-16 | Nikon Corporation | Scanning type exposure apparatus |
| JPH11294520A (ja) * | 1998-04-08 | 1999-10-29 | Canon Inc | 除振装置、これを用いた露光装置およびデバイス製造方法、ならびに除振方法 |
| JP2000021702A (ja) * | 1998-06-30 | 2000-01-21 | Canon Inc | 露光装置ならびにデバイス製造方法 |
| KR100697569B1 (ko) * | 1998-09-03 | 2007-03-21 | 가부시키가이샤 니콘 | 노광장치 및 노광방법, 그리고 디바이스 및 그의 제조방법 |
| FR2818640B1 (fr) * | 2000-12-22 | 2004-02-13 | Poudres & Explosifs Ste Nale | Procede de synthese de chloroformiates aliphatiques, cycloaliphatiques ou araliphatiques |
| US20020080339A1 (en) * | 2000-12-25 | 2002-06-27 | Nikon Corporation | Stage apparatus, vibration control method and exposure apparatus |
| TWI307526B (en) * | 2002-08-06 | 2009-03-11 | Nikon Corp | Supporting device and the mamufacturing method thereof, stage device and exposure device |
| JP4458322B2 (ja) * | 2003-01-14 | 2010-04-28 | キヤノン株式会社 | 露光装置およびデバイス製造方法 |
| JP2006344685A (ja) | 2005-06-07 | 2006-12-21 | Canon Inc | 露光装置 |
-
2005
- 2005-06-07 JP JP2005167353A patent/JP2006344685A/ja active Pending
-
2006
- 2006-06-05 US US11/446,117 patent/US20070035713A1/en not_active Abandoned
-
2008
- 2008-12-15 US US12/334,707 patent/US7768626B2/en not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0729801A (ja) * | 1993-07-14 | 1995-01-31 | Nikon Corp | 走査型投影露光装置 |
| JPH08241126A (ja) * | 1995-03-02 | 1996-09-17 | Canon Inc | 同期位置制御方法および装置 |
| JPH0926828A (ja) * | 1995-07-13 | 1997-01-28 | Canon Inc | 位置制御方法及び装置並びにそれを使用した半導体製造装置 |
| JPH10256144A (ja) * | 1997-03-11 | 1998-09-25 | Canon Inc | 除振装置 |
| JPH11297587A (ja) * | 1998-04-08 | 1999-10-29 | Canon Inc | 露光装置およびデバイス製造方法 |
| JP2000349015A (ja) * | 1999-06-07 | 2000-12-15 | Canon Inc | デバイス製造装置および方法 |
| JP2001126977A (ja) * | 1999-10-27 | 2001-05-11 | Nikon Corp | ステージ装置および露光装置ならびに回路デバイス製造方法 |
| JP2003299340A (ja) * | 2002-04-03 | 2003-10-17 | Nikon Corp | 磁石ユニット、リニアモータおよびステージ装置並びに露光装置 |
| JP2004200218A (ja) * | 2002-12-16 | 2004-07-15 | Nikon Corp | 支持装置及びステージ装置並びに露光装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009004737A (ja) * | 2007-03-29 | 2009-01-08 | Asml Netherlands Bv | 可動物体の位置依存信号を測定するための測定システム、リソグラフィ装置および方法 |
| US7903866B2 (en) | 2007-03-29 | 2011-03-08 | Asml Netherlands B.V. | Measurement system, lithographic apparatus and method for measuring a position dependent signal of a movable object |
| JP4686563B2 (ja) * | 2007-03-29 | 2011-05-25 | エーエスエムエル ネザーランズ ビー.ブイ. | 可動物体の位置依存信号を測定するための測定システム、リソグラフィ装置および方法 |
| US8457385B2 (en) | 2007-03-29 | 2013-06-04 | Asml Netherlands B.V. | Measurement system and lithographic apparatus for measuring a position dependent signal of a movable object |
| JP2014534607A (ja) * | 2011-09-09 | 2014-12-18 | マッパー・リソグラフィー・アイピー・ビー.ブイ. | フレキシブルカップリングを備えた投影システム |
| US9268216B2 (en) | 2011-09-09 | 2016-02-23 | Mapper Lithography Ip B.V. | Projection system with flexible coupling |
| KR101806599B1 (ko) | 2011-09-09 | 2017-12-07 | 마퍼 리쏘그라피 아이피 비.브이. | 가요성 커플링을 구비한 투사 시스템 |
| JP2015212932A (ja) * | 2014-04-14 | 2015-11-26 | キヤノン株式会社 | ステージ制御装置、加工装置、計測装置および露光装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20070035713A1 (en) | 2007-02-15 |
| US7768626B2 (en) | 2010-08-03 |
| US20090141259A1 (en) | 2009-06-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7768626B2 (en) | Exposure apparatus | |
| EP1124078B1 (en) | Active anti-vibration apparatus and exposure apparatus | |
| JP2003314610A (ja) | 能動制振装置、露光装置及びデバイス製造方法 | |
| JP4143438B2 (ja) | 支持装置、露光装置、デバイス製造方法 | |
| JP2006032788A (ja) | 露光装置及び半導体デバイスの製造方法 | |
| JP2007273633A (ja) | ステージ装置及びその制御方法、露光装置及びデバイス製造方法 | |
| US6213443B1 (en) | Anti-vibration apparatus and exposure apparatus using the same | |
| US20080218720A1 (en) | Exposure apparatus and method of manufacturing device | |
| JP2004100953A (ja) | 制振装置及び露光装置 | |
| JP2005147281A (ja) | 除振装置、露光装置、およびデバイス製造方法 | |
| JP5789153B2 (ja) | 露光装置及びデバイス製造方法 | |
| JP2003264134A (ja) | ステージ制御装置、露光装置、及びデバイス製造方法 | |
| JP2007120646A (ja) | 制振装置およびそれを備えた露光装置 | |
| JP6566192B2 (ja) | 防振装置、露光装置、及びデバイス製造方法 | |
| JP2008069890A (ja) | 除振装置、露光装置及びデバイス製造方法 | |
| JP2004165416A (ja) | 露光装置及び建屋 | |
| JPH11150062A (ja) | 除振装置及び露光装置並びに除振台の除振方法 | |
| JP2005051197A (ja) | ステージ制御方法及び装置、ステージ制御プログラム、露光装置、並びにデバイス製造方法 | |
| JP2007240396A (ja) | 振動検出センサ、防振装置、及び露光装置 | |
| JP2007049056A (ja) | ステージ制御方法及び装置、ステージ制御プログラム、露光装置、並びにデバイス製造方法 | |
| JP2001140972A (ja) | 除振装置 | |
| JP2000012435A (ja) | 除振装置および露光装置 | |
| JP2001230178A (ja) | 位置決め装置、露光装置およびデバイス製造方法 | |
| JP2002367893A (ja) | 露光装置 | |
| JP2004111653A (ja) | 位置決め装置及びそれを適用した露光装置並びに半導体デバイスの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080606 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080606 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101018 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101101 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110304 |