CN1125444C - 聚焦伺服系统与获取焦点伺服的启动方法 - Google Patents
聚焦伺服系统与获取焦点伺服的启动方法 Download PDFInfo
- Publication number
- CN1125444C CN1125444C CN94105277A CN94105277A CN1125444C CN 1125444 C CN1125444 C CN 1125444C CN 94105277 A CN94105277 A CN 94105277A CN 94105277 A CN94105277 A CN 94105277A CN 1125444 C CN1125444 C CN 1125444C
- Authority
- CN
- China
- Prior art keywords
- focus
- signal
- search
- object lens
- record medium
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/08—Disposition or mounting of heads or light sources relatively to record carriers
- G11B7/09—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B11/00—Recording on or reproducing from the same record carrier wherein for these two operations the methods are covered by different main groups of groups G11B3/00 - G11B7/00 or by different subgroups of group G11B9/00; Record carriers therefor
- G11B11/10—Recording on or reproducing from the same record carrier wherein for these two operations the methods are covered by different main groups of groups G11B3/00 - G11B7/00 or by different subgroups of group G11B9/00; Record carriers therefor using recording by magnetic means or other means for magnetisation or demagnetisation of a record carrier, e.g. light induced spin magnetisation; Demagnetisation by thermal or stress means in the presence or not of an orienting magnetic field
- G11B11/105—Recording on or reproducing from the same record carrier wherein for these two operations the methods are covered by different main groups of groups G11B3/00 - G11B7/00 or by different subgroups of group G11B9/00; Record carriers therefor using recording by magnetic means or other means for magnetisation or demagnetisation of a record carrier, e.g. light induced spin magnetisation; Demagnetisation by thermal or stress means in the presence or not of an orienting magnetic field using a beam of light or a magnetic field for recording by change of magnetisation and a beam of light for reproducing, i.e. magneto-optical, e.g. light-induced thermomagnetic recording, spin magnetisation recording, Kerr or Faraday effect reproducing
- G11B11/1055—Disposition or mounting of transducers relative to record carriers
- G11B11/10576—Disposition or mounting of transducers relative to record carriers with provision for moving the transducers for maintaining alignment or spacing relative to the carrier
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/004—Recording, reproducing or erasing methods; Read, write or erase circuits therefor
- G11B7/005—Reproducing
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/08—Disposition or mounting of heads or light sources relatively to record carriers
- G11B7/085—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam into, or out of, its operative position or across tracks, otherwise than during the transducing operation, e.g. for adjustment or preliminary positioning or track change or selection
- G11B7/08505—Methods for track change, selection or preliminary positioning by moving the head
- G11B7/08511—Methods for track change, selection or preliminary positioning by moving the head with focus pull-in only
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B7/00—Recording or reproducing by optical means, e.g. recording using a thermal beam of optical radiation by modifying optical properties or the physical structure, reproducing using an optical beam at lower power by sensing optical properties; Record carriers therefor
- G11B7/08—Disposition or mounting of heads or light sources relatively to record carriers
- G11B7/09—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following
- G11B7/0908—Disposition or mounting of heads or light sources relatively to record carriers with provision for moving the light beam or focus plane for the purpose of maintaining alignment of the light beam relative to the record carrier during transducing operation, e.g. to compensate for surface irregularities of the latter or for track following for focusing only
Landscapes
- Moving Of The Head For Recording And Reproducing By Optical Means (AREA)
- Optical Recording Or Reproduction (AREA)
Abstract
一种聚焦伺服系统包括一信号发生单元,产生以物镜位置为依据的聚焦误差信号、以光学记录介质记录表面反射光束为依据的代表光学记录介质读出信息的读出信号,以及以读出信号为依据代表焦点获取启动范围的焦点获取启动范围信号;一聚焦伺服单元,以聚焦误差信号为基础执行聚焦伺服控制操作;一零交叉点检测单元,从聚焦误差信号中检出零交叉点;一搜索信号发生单元分别产生下行和上行搜索信号;和一个系统控制器。
Description
本发明涉及一种聚焦伺服系统和焦点伺服启动方法,尤其是涉及光学记录/再现装置的聚焦伺服系统,以及焦点伺服获取启动方法。
在用于将信息记录于圆盘形记录介质上,诸如光盘,磁光盘等的光学记录装置中,或用于再现记录于记录介质上信息的光学再现装置中,光学头所发出的光必须正确地聚焦在记录盘的记录表面。因此,光学记录装置或光学再现装置要具备一个聚焦伺服系统,由它驱动光学头的物镜移动靠近和远离记录盘的记录表面。由于聚焦伺服可能的行程范围,即焦点获取启动的范围相对较窄,所以在记录/再现操作开始时,或进入记录轨迹之后,通过焦点搜索操作将物镜移入焦点获取启动范围,然后聚焦伺服环闭合,进行聚焦伺服操作。在开始记录操作或再现操作时,在焦点获取操作和聚焦伺服操作完成之后,再进行主轴伺服与轨迹伺服操作。在启动程序完成之后,可以进行记录或再现的光束扫描操作。
在焦点搜索操作过程中,可迫使物镜在离盘表面最远点与最近点之间移动,其中图1(b)的S形曲线表示的聚焦误差信号EF,可以通过处理光学头上用于检测反射光的四分检测器的输出来获得。图1(a)表示总信号,即,四分检测器的信号RF。信号RF与给定阈值作比较,得到信号FOK,如图1(c)所示,它表示聚焦伺服的启动范围。物镜移入焦点获取的启动范围,即对应于焦点搜索操作中FOK信号为高值的H区域,之后运行聚焦伺服系统,以校正聚焦控制,也就是用聚焦伺服控制,把物镜调整到焦点获取启动范围内由图1(d)所示的焦距零点检测信号F2C的后边缘。
焦点搜索操作将参考图2所示的流程图和表示出不同方式焦点搜索操作之波形的图3(a)至3(c)波形图。在下文将予以描述。
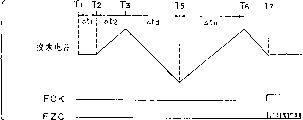
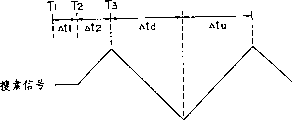
参见图2,在步骤F10启动焦点搜索操作中,在步骤F11于Δt1=200毫秒内,即图3(a)至3(c)中T1和T2之间的时间内,初始化聚焦伺服系统。在Δt1时间内,主轴转动加速,并且物镜定位于初始的位置。然后步骤F12在时间Δt2=500毫秒内,即图3(a)到3(c)中T2与T3之间的时间内,进行最初的上行搜索操作,以移动物镜到最接近盘的位置处,为的是从最接近盘的位置开始搜索操作。
在初始化的操作完成之后,开始实际搜索操作,即检测焦点获取启动范围的操作运行,同时移动物镜。第一下行搜索操作,即从最接近盘的位置进行物镜移动离开盘的操作,在步骤F13运行中把一个搜索驱动电压在T3时刻(图3(a)至图3(c))加到聚焦线圈上,以进行下行搜索。在下行搜索操作过程中,在步骤F14于焦点搜索时检测FOK信号。如果FOK信号到达高值,并且在T4时刻(图3(a))检测到焦点获取启动范围,即,如果在步骤F14中问题的答案是肯定的,则在步骤F16,使物镜正确聚焦的聚焦伺服环闭合。如果焦点获取的启动范围被连续地测出(图3(a)),则焦点搜索操作在步骤F19终止。
如果下行搜索操作不能测到焦点,则要继续进行下行搜索操作,直至物镜到达最远点,然后进行上行操作,即将物镜从最远点移向盘的搜索操作,也就是说,下行搜索操作要持续一段预定的时间Δtα(图3(b)),然后再开始上行搜索操作(步骤F15-F18)。如图3(b)所示,上行搜索操作在时刻T5和T6之间的时间Δtu期间执行,在此期间物镜移向最近点,然后在步骤F13-F16时刻再次开始下行搜索操作,以检测出焦点。图2的流程图表示一个程序举例,用它不能通过上行搜索操作检测到焦点。图3(b)表示了一种操作,用它可以在T7时刻取到焦点,并终止焦点搜索操作(步骤F14→F16→F17→F19)。
在某些情况下,如图3(c)所示,即使焦点检测到了,但由于干扰等因素聚焦伺服系统又丢失了所获得的焦点。图3(c)表示了一个例子,其中焦点获取启动的操作是在时刻T4开始,但聚焦伺服系统又丢失了焦点,且FOK信号又进入了低值。根据检测FOK信号从高到低的变化,在时刻T11再次启动焦点搜索操作,也就是说,使程序从F17返回到F11。然后,在步骤F11于时刻T11和T12之间进行初始化操作,在步骤F12于时刻T12和T13之间进行最初的上行搜索操作,并在下行搜索方式中执行焦点获取的启动操作。如在时间T14成功地完成了焦点搜索操作,则焦点搜索结束。
另外,迅速地完成焦点搜索操作很重要。快速的焦点搜索操作可减少启动光盘再现系统所必须的时间,并能使光盘再现系统迅速开始再现操作。
光盘再现系统把盘中读出的数据高速地暂存于缓冲存储器中,从缓冲存储器中以相对较低的速度读出数据,并将缓冲存储器中读出的数据在预定时间内转换成音频信号,以使再现出的音频信号即便唱头因振动或干扰而从正确的轨迹位置上错开也不会中断。由于数据存储在缓冲存储器中,聚集在缓冲存储器中的数据被连续地读出,即便在某段时间内唱头从正确轨迹位置错开而不能从盘中读取数据也无妨。因此,如果聚集在缓冲存储器中的数据用尽之前,轨迹进入操作完成且再现操作重又开始,则再现操作就会接续下去。
如果光盘再现装置用较长的时间完成音轨进入之后的启动操作,则缓冲存储器中聚集的数据就会因此而减少。譬如,在短时间内反复出现随机误差,缓冲存储器将用尽其数据,且再现的声音将中断。于是,启动操作的延迟成为受振动的自动光盘装置中的一个大的难题。
因此,启动操作必要时间的减少已经成为一个需紧迫解决的问题,强烈地要求增加焦点搜索操作速度、以有效地快速完成启动操作。
但是,前述已知的焦点搜索操作,在焦点获取启动操作失败之后,再次开始焦点获取启动操作之前,需要一段时间,如图3(c)所示,譬如,假设初始化时间Δt1=200毫秒,最初上行搜索时间Δt2=500毫秒,T4-T11之间的时间是检测焦点获取启动操作的失败所必须的时间,它为50毫秒,检测到焦点获取启动的范围的时间从T13至T14为450毫秒,则焦点获取启动操作,在初次焦点获取启动操作失败之后大约1200毫秒内,不会重新启动。由于这样一个长的时间在焦点获取启动操作重新开始之前要流逝过去,使焦点获取启动操作会花费很长时间,而且如果焦点获取启动操作连续几次失败,则再现的声音将会中断。
焦点搜索操作可以在提高搜索速度,即物镜移动速度情况下快速完成,。但是,如果搜索速度总是很高,则不可能依据焦点获取启动的范围(FOK信号)来控制物镜的位置。因此,要限制搜索速度的增加。
因而,本发明的目的是提供一种解决了上述问题的聚焦伺服系统。
本发明的另一目的是提供一种解决了上述问题的焦点获取方法。
根据本发明提供的聚焦伺服系统,它包括:一个信号发生单元,一个伺服单元,一个零交叉点检测单元,一个搜索信号发生单元和一个控制单元。信号发生单元以通过检测经物镜投射到光记录介质上并由光记录介质反射的光束而得到的垂直于记录表面方向上的光记录介质记录表面位移为依据,产生一个聚焦误差信号,并产生一个以反射光为依据的读出信号,和一个以读出信号为依据的代表着焦点获取启动范围的焦点获取启动范围检测信号。伺服单元从信号发生单元接收聚焦误差信号并执行聚焦伺服操作以根据聚焦误差信号对物镜调焦。零交叉点检测单元接收来自信号发生单元的聚焦误差信号并在聚焦误差信号中检测零交叉点。搜索信号发生单元产生搜索信号,以驱动物镜移近和远离光记录介质的记录表面。控制单元接收由信号发生单元产生的焦点获取启动范围检测信号和零交叉点检测单元提供的零交叉点检测信号。控制单元将搜索信号发生单元产生的搜索信号与信号发生单元的聚焦误差信号分别送至伺服系统。在依据搜索信号发生单元所给搜索信号而进行的物镜从初始位置远离光记录介质的操作开始之后的一个预定时间内,该控制单元依据信号发生单元产生焦点获取启动范围检测信号和零交叉点检测单元提供的零交叉点检测信号,改变搜索信号发生单元产生的搜索信号并且将聚焦误差信号提供给伺服单元。
根据本发明提供的聚焦伺服系统包括:一信号发生单元,一伺服单元,一零交叉点检测单元,一搜索信号发生单元和一控制单元。信号发生单元根据检测经物镜投射到光记录介质上并由光记录介质反射光束而得到的,垂直于记录表面方向上的光记录介质记录表面的位移,产生一聚焦误差信号,并产生一个依据反射光束的读出信号及一个以读出信号为依据的代表着焦点获取启动范围的焦点获取启动范围检测信号。伺服单元接收来自信号发生单元的聚焦误差信号,并根据聚焦误差信号执行聚焦伺服操作以便对物镜调焦。零交叉点检测单元接收来自信号发生单元的聚焦误差信号并检测出聚焦误差信号中的零交叉点。搜索信号发生单元产生搜索信号,以驱动物镜移近和远离光学记录介质的记录表面。控制单元接收信号发生单元产生的焦点获取启动范围检测信号和零交叉点检测单元提供的零交叉点检测信号。当物镜根据焦点获取启动操作范围检测信号和零交叉点检测信号而移动离开光记录介质的过程中未能检测到焦点获得启动点时,控制单元会再次把物镜移动远离光记录介质。
根据本发明提供的聚焦伺服系统,它执行f焦点搜索程序,并通过按预定驱动信号驱动物镜移动而改变照射盘形记录介质的光束之焦点位置,来检测焦点获取启动的范围,然后闭合聚焦伺服环,以实行聚焦伺服操作。聚焦伺服系统包括一个第一和一个第二焦点搜索驱动信号发生单元,以及一个控制单元。第一焦点搜索驱动信号发生单元产生第一焦点搜索驱动信号,以驱动物镜在执行焦点搜索程序中高速移动。第二焦点搜索驱动信号发生单元产生第二焦点搜索驱动信号,以驱动物镜在执行焦点搜索程序中低速移动。控制单元使第一焦点搜索驱动信号发生单元产生从焦点搜索程序启动就产生第一焦点搜索驱动信号以进行第一焦点搜索操作,使第二焦点搜索驱动信号发生单元根据第一焦点搜索操作期间检测到的焦点获取启动范围的检测信号和/或入焦点检测信号,从预定的时间点起产生第二焦点搜索驱动信号,以进行第二焦点搜索操作,并根据焦点获取启动范围的检测信号和/或入焦点检测信号,实施一控制操作,以启动聚焦伺服操作。
根据本发明提供的焦点获取方法包括:根据焦点搜索信号将物镜从它的初始位置移动离开光学记录介质记录表面;依据物镜远离开光学记录介质记录表面过程中出现聚焦误差信号的零交叉点时所给出的零交叉点检测信号,检测出焦点获取点,并检测出表示焦点获取启动范围的信号;依据焦点获取点测出之后表示焦点获取启动范围的信号值,或依据光记录介质中读出的信号,确定是否成功地获取了焦点;当确认焦点获取启动操作没有成功时,继续移动物镜进一步远离光学记录介质记录表面。
根据本发明提供的焦点获取方法,包括:第一焦点获取步骤,以一个高的速度使物镜来回周期性地远离光学记录介质记录表面和接近光学记录介质记录表面;和第二焦点获取步骤,使物镜以低速或远离光学记录介质记录表面或接近光学记录介质记录表面,此步骤是随第一焦点获取步骤之后进行的。焦点获取第二步骤,在第一焦点获取步骤中焦点获取可能范围的信号值与预定值相吻合时启动。
根据本发明焦点搜索操作不返回到其初始状态,而且即便在焦点获取启动操作中焦点搜索操作失败了仍继续检测焦点,以使焦点搜索操作可以快速进行。焦点搜索操作能产生因外部振动等因素导致的非常多的焦点获取机会,且焦点获取启动操作即便失败了在短时间内,仍可以任意多次地重复焦点获取启动操作。
而且根据本发明,在焦点搜索操作中,第一高速搜索操作可以用于获得焦点获取启动范围的检测信号和/或入焦点检测信号,而其后的低速搜索操作在焦点获取范围检测信号和/或入焦点检测信号被获得时,或在焦点获取范围检测信号和/或入焦点检测信号被获得之后,一预定时刻启动。因此,能迅速接近焦点获取启动范围,并确保焦点获取启动操作成功,使快速、高可靠性的焦点获取启动操作成为可能。
下面结合附图说明,进一步理解本发明。
图1(a)至1(d)是解释焦点搜索操作的辅助图表;
图2是与本发明相关的焦点搜索程序的流程图;
图3(a)至3(c)是解释与本发明相关的焦点搜索操作的辅助图表;
图4是具有本发明聚焦伺服系统的记录/再现装置的方框图;
图5(a)和5(b)是帮助说明本发明第一实施例中由聚焦伺服系统得到的焦点获取机会的图表;
图6是第一实施例中聚焦伺服系统的方框图;
图7是第一实施例中由聚焦伺服系统执行的焦点搜索程序的流程图;
图8(a)至8(d)是帮助解释第一实施例中聚焦伺服系统之焦点搜索操作的图表。
图9(a)至9(d)是帮助解释第一实施例中聚焦伺服系统之焦点搜索操作的图表;
图10是根据本发明第二实施例中由聚焦伺服系统执行的焦点搜索程序流程图;
图11(a)至11(d)是帮助解释第二实施例中聚焦伺服系统的焦点搜索操作的图表;
图12是根据本发明的第二实施例中聚焦伺服系统的方框图;
图13是第三实施例中由聚焦伺服系统执行的焦点搜索程序的流程图;
图14是帮助解释第三实施例中聚焦伺服系统的第一次搜索操作的图表;
图15(a)至15(c)是帮助解释第三实施例中聚焦伺服系统焦点搜索操作的图表;
图16(a)至16(c)是帮助解释第三实施例中聚焦伺服系统焦点搜索操作的图表;
图17(a)至17(c)是帮助解释第三实施例中聚焦伺服系统焦点搜索操作的图表;
图18是帮助解释第三实施例中聚焦伺服系统第一次搜索操作的图表;
图19(a)和19(b)是帮助解释第三实施例中聚焦伺服系统另一个第一次搜索操作的图表。
本发明的具体聚焦伺服系统将在下文中,参考在光学记录介质上记录信息或再现信息的光学记录/再现装置的附图,作出说明。首先,适于带有聚焦伺服系统的光学记录/再现装置将参考图4作出说明。
参见图4,框图中表示出一个用于在磁光盘(下文简称“盘”)上记录信息或再现信息的光学记录/再现装置,它包含一个根据本发明的聚焦伺服系统,其中盘1由主轴马达2驱动而旋转,光学头3扫描盘1,以进行记录/再现操作,在盘1上记录信息时用高能量激光束加热音轨到居里温度,而用低能量激光束应用克尔效应从反射的激光束中再现数据。
当盘1为只读光盘时,其上的数据被记录在凹槽中,诸如小型盘,光学头3提供一个响应于凹槽所发射光光强变化的再现信号RF。下文将要说明的磁记录操作中不用于只读光盘。
从盘1中读取出数据的光学头3包括一个含有激光二极管即光源、反射光分束器与物镜3a的光学系统,和一个用于检测反射激光束的检测器。物镜3a被支撑起来,以便由一执行机构沿径向,即轨道方向,和远离与接近盘1的方向,即聚焦方向移动它。光学头3装在一个滑轨机构5上,它可径向地移动光学头3。对盘1施加一个受数据调制的垂直磁场的磁头6与光学头3,在盘1相对两侧彼此相对设置。
在再现工作方式中,光学头3从盘1拾取信息,并将该信息送到RF放大器7中。然后,RF放大器处理这些输入信息,以提取出再现的RF信号,追轨误差信号、聚焦误差信号、绝对位置信息、地址信息、子码信息,有关焦点获取启动范围的信息(FOK信息)等。再现的RF信号被送到编码器/解码器8。追轨误差信号和聚焦误差信号被送到伺服回路9。FOK信号被送到系统控制器11。绝对位置信息由预先在光盘1上的预制槽即波动的轨迹记录来表示。依据含有追轨误差信号和聚焦误差信号在内的输入信号,和系统控制器11所发出的轨迹跳跃指令、寻找指令和转速信息,伺服系统9产生伺服驱动信号。执行机构4和滑轨机构5受伺服驱动信号控制进行聚焦和追轨。系统控制器11控制主轴马达以恒定角速度(CAV)或恒定的线速度(CLV)运转。编码器/解码器8处理要再现RF信号,以将其解码,如EFM(八-十四调制)或CIRC。存储控制器12将解码后的再现RF信号写入缓冲存储器13即RAM内暂存。光学头3从盘1中读出数据,并且以1.4Mbit/秒的速度间歇地将要再现RF信号从光学头3传递到缓冲存储器13。
以0.3Mbit/秒的转换速度,将存储在缓冲存储器13中的再现RF信号读出,且被送到编码器/解码器14。然后,处理要再现的RF信号,将其解码成音频压缩信号,经解码的再现信号由D/A转换器150转换成相应的模拟信号,模拟信号作输出的R-音频信号和L-音频信号通过终端16传送到放大器。
因此,记录/再现装置间隙地把盘1中读出的数据高速地写入缓冲存储器13中暂存,而以低速从缓冲存储器13中读出数据,再提供输出的音频信号。可是,即使追轨伺服系统暂时没有正确地跟随音轨,音频信号也会不中断地连续输出。
通过解码代表着波动的预制槽的信号而获取的绝对位置信息或记录地址信息,经编码器/解码器8传送到系统控制器11,然后系统控制器11依据绝对位置信息或记录地址信息。执行所必要的控制操作。
假设盘1为磁光盘,当要在盘1上记录信息信号时,由终端17接收的模拟音频信号借助A/D转换器18转换成相应的数字数据,用编码器/解码器14将该数字化数据编码成音频压缩数据,借助于存储控制器12,将压缩的音频记录数据写入缓冲存储控制器13暂存,然后在预定时间内,把压缩的音频记录数据从缓冲存储器13中读出,送到编码器/解码器8。然后编码器/解码器8处理这些经过压缩的声音记录数据,以进行CIRC或EFM,并将编码后的记录数据送到磁头驱动电路15。根据编码的记录数据,磁头驱动电路15为磁头6提供磁头驱动信号,以便给盘1施加一个N或S极的垂直磁场,与此同时,系统控制器11在光学头3上加控制信号,以使光学头发出记录值的激光束。
在图4中,19表示的是一个输入单元,它具有可被操作者操作的一组按键,显示单元20,它可以有一液晶显示器。
TOC(目录表)被记录在盘1上,它包括:记录着诸如一些音乐的数据区和管理未记录区的数据。当盘1装入记录/再现装置时,或即将启动记录或再现操作之际,系统控制器11就发出信号,使伺服回路9驱动主轴马达2和光学头3,读出TOC区所存的数据。TOC数据经过RF放大器7和编码器/解码器8传递到存储控制器12,然后存储控制器12将TOC数据存入缓冲存储器的预定区域内,为的是在盘1上记录信息和从盘1中再现信息时把它们用于控制操作。
图6表示了根据本发明第一实施例的聚焦伺服系统,它适合于前述的记录/再现装置。图6表示了图4中光学头3、RF放大器7、伺服电路9和系统控制器11的细节。在图6中,只表示出了聚焦伺服系统的组元,而控制追轨系统、滑移和主轴的伺服回路被省略了。
光学头3具有检测反射光束用的四分检测器3b(A、B、C和D),检测侧边光点的侧边光点检测器3c(E和F)和检测磁光数据及凹槽数据的检测器3d(I和J)。检测器3b、3c和3d提供的检测信号被送到RF放大器7。根据边侧光点检测器3c提供的检测信号SE和SF,RF放大器7产生一个追轨误差信号。RF放大器7处理四分检测器3b提供的检测信号SA,SB,SC和SD,以计算出{(SA+SD)-(SB+SC)}得出聚焦误差信号EF。RF放大器7处理检测器3d提供的检测信号SI和SJ得出RF信号。当读出盘1上记录的数据时,如果盘1上所记录的数据是磁光数据,RF放大器7计算(SI-SJ),如果盘1上记录的数据是凹槽数据RF放大器7即计算(SI+SJ)。RF放大器7把四分检测器3b提供的检测信号加起来得到一个总信号(SA+SB+SC+SD),把此总信号与给定阈值比较产生一个对应于总信号与阈值之差的FOK信号(图1(c)),并将此FOK信号提供给系统控制器11。
聚焦误差信号EF经电阻R1和R2传递到相位补偿器30进行相位补偿。相位补偿器30的输出信号经R3传递到差分放大器31,而差分放大器31的输出信号被送到聚焦驱动器32。聚焦驱动器32输出的聚焦驱动信号,被加在执行机构4的聚焦线圈上。反馈电阻R4接在差分放大器31上。
前述的信号环是一个聚焦伺服环,它在开关SW1处于关断状态时起聚焦伺服操作的作用。当开关SW1接通时,用于聚焦伺服操作的反馈环打开,以阻断聚焦伺服环的聚焦伺服操作。聚焦误差信号EF还要加到比较器33的输出端上,然后比较器33把聚焦误差信号EF与参考电压Vref做比较,并把FZC信号送到系统控制器11。
电流源34提供一个驱动电流,以在焦点搜索操作过程中,驱动物镜3a移向盘1的记录表面实现上行搜索。在焦点搜索操作的下行搜索操作中,电流源35提供一个电流,以驱动物镜3a移离盘1的记录表面。电流源34和35分别经开关SW3和SW4连到时间常数电路中,此时间常数电路由时间常数计算器C1和时间常数电阻R7组成。差分放大器38的输经电阻R6和R5传递到差分放大器31。当开关SW2处于关断状态时,由电流源34和35提供的驱动电流经聚焦驱动器32传给了执行机构4的聚焦线圈。开关SW1到SW4分别由系统控制器11提供的开关控制信号SSW1到SSW4进行控制,以完成开-关操作。
本实施例的聚焦伺服系统,由图6所示的聚焦伺服回路9和与伺服控制电路9相连的系统控制器11之控制功能构成。
根据本发明的第一实施例与第二实施例中的聚焦伺服系统工作原理,将结合图5(a)和5(b)在下文中描述出来。有预定波形的搜索电压被加在聚焦线圈上给其提供搜索电流,以使物镜在搜索焦点过程中,从近点即最接近盘1记录表面的位置向着远点即离盘最远的位置移动。实际上,尤其与记录/再现装置用在汽车上时,由于与搜索电压无关的外部振动或冲击会被加在记录/再现装置上,由此导致的物镜移动会常常发生。假设具有图5(a)波形的搜索电压被施加到聚焦线圈上,物镜的位置应该按图5(b)中虚线所示变化。然而,经常会出现由外部振动等因素引起的如图5(b)中不规则实线所示的物镜位置随机改变,最大可能是出现在车用光盘唱机上。假设长短交替划下所示的位置是物镜的焦点位置,则物镜通过入焦点位置的时刻就是实施焦点获取启动操作的时机。如果物镜的位置如图5(b)所示的随机变化,则无规实线会多次跨过长短交替的划线。因此,焦点获取启动操作的机会会频频出现,而与搜索电压无关。聚焦伺服系统在其焦点获取启动操作失败之后,每当出现聚焦伺服系统可以执行焦点获取启动操作的机会时,它便能立即开始焦点获取启动操作。
第一实施例中聚焦伺服系统的焦点搜索操作,将参见图7,图8(a)至8(d)以及图9(a)至9(d)在下文中描述。
图7表示一个由系统控制器11执行的程序,为的是控制聚焦伺服系统回路9进行焦点搜索操作。图8(a)与9(a),图8(b)与9(b),图8(c)与9(c),以及图8(d)与9(d)分别表示了搜索电压、FOK信号、F2C信号的波形,以及由于搜索电压与外部振动的协同效应而产生的物镜位置变化。
参见图7和8(a)至8(d),随着步骤F100焦点搜索操作的启动,系统控制器11接通开关SW1,以打开聚焦伺服环,并断开开关SW2,以在步骤F101中于Δt1时间之内完成初始化。在步骤F102,接通开关SW3,以在Δt2时间内把上行搜索电流从电流源34送到执行机构4的聚焦线圈,来移动物镜3a完成初始的上行搜索操作。
然后,在步骤F103系统控制器11断开SW3,接通SW4,以在下行搜索时间(图5(a)中Δtd)内将下行搜索电流从电流源35送到执行机构4的聚焦线圈,来移动物镜,完成下行搜索操作,重新调整和启动计时器,以对下行搜索时间进行计时。
在物镜3a作下行搜索移动过程中,用于检测FOK信号和FZC信号的步骤F104与F105循环要一直重复到物镜位置与入焦点位置相吻合时才停止。当物镜位置与入焦点位置吻合时,在步骤F106,系统控制器11接通开关SW1,接通开关SW2以打开聚焦伺服环,并停止计时。如果聚焦点获取启动操作获取成功(图8(a)中时刻T4),即步骤F106中询问的应答为肯定时,则控制程序进入步骤F115,终止聚焦伺服操作。
图9(a)到9(d)表示当T4时刻系统控制器11没能实现焦点获取启动操作时,焦点搜索操作的一种方式。当焦点获取启动操作不能把物镜3a定位在入焦点位置时,焦点获取启动操作即告失败。
由于投射在光盘1上的光束在记录膜表面与其下面的保护膜上都发生反射,则保护膜反射的光束会形成一个S曲线,其幅值比记录膜反射光所形成的S曲线的幅值要小。但是,如果RF放大器7有一个AGC电路,则这些S曲线实际上为等幅的,因此会得出错误的入焦点位置。
当由于伺服操作的失误而造成焦点获取启动操作失败时,FOK信号变为低值。当伺服操作在错误的入焦点位置开始时,则随后无法读出数据。系统控制器11检测出此状态,在其中读出的数据不可能是来自编码器/解码器8所提供的监控信号,而表示了错误的帧同步信号。
当步骤F106确认焦点获取启动操作没有成功时,程序即进入步骤F108,重新开始下行搜索操作,且记录下搜索时间的计时器也重新开始计时。于是,程序不返回到F101步骤去,却从开始焦点获取启动操作的步骤,开始进行计时焦点搜索操作。
尽管下行搜索重复到检测出入焦点位置就停止了,但是如图5(a)和5(b)所示的外部振动等造成的物镜3a移动与搜索电压波形无关。于是,有时会发生焦点搜索操作开始之后物镜3a移到入焦点位置的情况。例如图9(a)到9(d)中所示,下行搜索操作在T20时刻启动,物镜3a在T21时刻处在入焦点位置。当T21时刻测到了入焦点状态时,在F106步骤再次进行焦点获取。如果焦点获取启动操作成功,即F107步骤询问的答复为肯定,则程序进入步骤F115,结束焦点搜索操作。这样,即使焦点获取启动操作没有成功,在检测到失败之前焦点搜索操作立即从一种状态重新启动,并且焦点搜索操作重新启动之后立刻会出现焦点获取启动操作的机会,在此机会出现时就再次进行焦点获取启动操作。
在检测到入焦点位置之前已经花费了Δtd时间执行下行搜索操作的情况下,即如果F105步骤询问的答复为肯定,则在步骤F109开始上行搜索,此步骤中系统控制器11断开开关SW3接通开关SW4,以为执行机构4的聚焦线圈提供上行搜索电流,并重新调整和启动计时器来为上行搜索时间计时。然后,步骤F110和F111循环一直运行到检测出入焦点位置,以获得入焦点位置。在测出入焦点位置时,停止计时并在步骤F112执行焦点获取启动操作。如果在步骤F113确认焦点获取启动操作获得成功,则程序进入步骤F115结束焦点搜索操作。在焦点获取启动操作不成功的情况下,则在焦点获取启动操作和计时器重新开始重复步骤F110与F111循环之前,在步骤F114立即从该状态重新开始上行搜索操作。万一入焦点位置找到之前已经用完了上行搜索时间(图5(a)中时间Δtu),即如果F111步骤询问的答案为肯定,则程序返回步骤F103再开始下行搜索操作。
这样,在焦点获取启动操作未成功的情况下,聚焦伺服系统最有效地利用了焦点获取启动操作的可能机会,来重复焦点获取启动操作。假设检测到焦点获取启动操作未成功所必需的时间为5毫秒,则在5毫秒或长一些时间内出现的焦点获取启动操作机会是进行下一次焦点获取启动操作的第一个机会,此机会出现的时间远比测出焦点获取启动操作失败之后按图2和3(a)到3(c)在前所述的下个焦点获取启动操作可以开始进行焦点搜索之前必须经历的时间(1000到1200毫秒)要短。所以,即使焦点获取启动操作不成功,焦点搜索操作仍可在比较短的时间间隔里重复进行,而且也很少出现由于焦点搜索操作成功的推迟造成的再现声音中断。
根据本发明第二实施例的聚焦伺服系统将在下文中参考图10和11(a)至11(d)进行说明。
第二实施例中的聚焦伺服系统可以比第一实施例中聚焦伺服系统更快地完成焦点搜索操作。第二实施例中的聚焦伺服系统,在T1与T3(图5(a))之后的初始化阶段即开始焦点搜索操作,以检测到入焦点位置。
参见图10,随着步骤F200中焦点搜索操作的开始,即依据FOK信号在F202和F203步骤检测焦点位置。一旦检测到入焦点位置,即关闭聚焦伺服环在步骤F204进行计时焦点获取启动操作。若在步骤F205确认焦点获取启动操作成功,则程序进入步骤F225,结束焦点搜索操作。若焦点获取启动操作不成功,则在步骤F206再次进行初始化。如果在初始化过程中不能完成焦点获取启动操作,则在步骤F207进行初始的上行搜索操作,以便在步骤F208和F209检测入焦点位置。如果F208步骤入焦点位置是否检测到的询问答复为肯定,则闭合聚焦伺服系统在步骤F210执行焦点获取启动操作。当F211步骤确认焦点获取启动操作已成功时,程序即进入步骤F225结束焦点搜索操作。如果焦点获取启动操作不成功,则在步骤F212重新开始初始上行搜索操作。
在某些情况下,物镜3a在初始化阶段或初始上行操作中,会由于外部振动等因素而穿过入焦点位置。由于第二实施例的聚焦伺服系统能够抓住这样一个进行焦点获取启动操作的机会,所以该聚焦伺服系统可以抓住此机会很快完成焦点搜索操作。例如图11(a)到11(d)所示的,初始化过程中物镜在T31时刻位于入焦点位置,即在T31时刻执行焦点获取启动操作。图10中步骤F213和F224与图7中步骤F103和F114是相同的,因而在此省去对其的说明。
本发明可以按不同于第一和第二实施例的各种方式实施。比如,焦点获取启动操作仅仅在下行搜索操作过程中或上行搜索过程中可以进行。还可以在最初阶段进行传统焦点搜索操作,并进行步骤F103,而在预定时间过去了,并且在预定时间内未完成焦点获取启动操作之后,进行后续步骤。还可以不给执行机构4的聚焦线圈提供任何搜索电流,为的是不入为地移动物镜的位置,而利用外部振动对物镜的驱动效应来移动物镜3a,并且当物镜由外部振动而移到入焦点位置时执行焦点获取启动操作。
根据本发明第三实施例的聚焦伺服系统将在下文中参考图12进行说明,其中那些相似于或对应于前述参考图6所示的第一实施例聚焦伺服系统中某些部件的部件,用相同的标记表示,而且在第三实施例聚焦伺服系统中图表与追轨伺服电路,滑移驱动伺服电路及主轴驱动伺服电路都将省去。
参见图12,光学头3具有一个检测反射光束的四分检测器53b(Ao,Bo,Co,和Do)和一个检测边侧光点的边侧光检测器53c(Eo和Fo)。RF放大器67依据边侧光点检测器53c输出的检测信号SE。和SF。产生一个追轨误差信号。RF放大器处理四分检测器53b输出的检测信号SAo,SBo,SCo和SDo,以计算由{(SAo+SDo)-SBo+SCo)}式得出的聚焦误差信号EF。RF放大器67将处理四分检测器53b输出检测信号SAo,SBo,SCo和SDo而得到的信号(SAo+SBo+SCo+SDo)与预定的阈值作比较,得到一个FOK信号(图1(a)到1(d)),并将FOK信号送到系统控制器50。聚焦误差信号EF经电阻R10和R20传送到包含在伺服电路59之内的相位补偿器30,以进行相位补偿。相位补偿器30的输出信号经电阻R30和差分放大器31传送到聚焦驱动器32,然后由聚焦驱动器32产生的聚焦驱动信号被加在执行机构4的聚焦线圈上。R40表示一个与差分放大器31相连的反馈电阻。此信号环用作聚焦伺服环,它在开关SW。断开状态下完成聚焦伺服操作的功能。当开关SW10接通时,聚焦伺服环的反馈环被打开,以停止聚焦伺服操作。比较器33把聚焦误差信号EF与参考电压Vref做比较,并产生一个FZC信号,再将此FZC信号送到系统控制器50。
在焦点搜索操作中,电流源54提供一驱动电流,以较低的速度将光学头3的物镜3a移向盘1的记录表面;电流源55提供一个以较高速度将物镜3a移向盘1的记录表面的驱动电流;电流源56提供一个以较低速度将物镜3a移离盘1记录表面的驱动电流;及电流源57提供一个以较高速度将物镜3a移动远离盘1记录表面的驱动电源。电流源54,55,56与57分别经开关SW30,SW40、SW50和SW60与一时间常数电路相连,此时间常数电路由时间常数电容器C10和时间常数电阻R70构成。时间常数电路的输出信号经差分放大器38和电阻R60和R40传送到差分放大器31。在开关SW20接通的时候,由电流源54,55,56或57提供的驱动电流经聚焦驱动器32送到执行机构4的聚焦线圈处。开关SW10到SW60受系统控制器50提供的开关控制信号SSW10到SSW60控制进行开关操作。有选择地接通开关SW30到SW60之一来进行焦点搜索操作。
第三实施例中的聚焦伺服系统由图12所示的聚焦伺服电路59和用于控制聚焦伺服电路59的系统控制器50的控制功能构成。
本第三实施例中聚焦伺服系统执行的焦点搜索操作,将在下文中参考图13,14,15(a)到15(c)及16(a)到16(c)进行说明。
聚焦伺服系统有选择地按高速搜索方式或低速搜索方式进行焦点搜索操作。首先,将结合图13和图14的步骤F301到F309描述按高速搜索方式进行的焦点搜索操作。在下面的描述中,“向下”用于变更移动或朝向盘1记录表面的方向,而“向上”用于变更移动或远离盘1记录表面的方向。
参考图13和14,在步骤F301启动焦点搜索操作,以执行第一阶段的焦点搜索程序,然后在步骤F302,系统控制器50接通开关SW10以打开聚焦伺服环,断开开关SW20并接通开关SW60以将电流源57的电流传送到执行机构的聚焦线圈来执行高速下行搜索操作。假设在t。时刻(图14)开始焦点搜索操作,则在循环步骤F302→F303→F304→F302中,此高速下行搜索操作要持续20毫秒直到t1时刻。如果在F303步骤FOK信号到达高值(HIGH),则执行下文将要解释的第二阶段焦点搜索程序。
在t1时刻,即高速下行搜索操作20毫秒时间结束时,系统控制器50断开开关SW60而接通开关SW40以将电流源55的电流送至执行机构的聚焦线圈进行高速上行搜索操作(F304,F305)。高速上行搜索操作在循环步骤F305→F306→F307→F305持续进行60毫秒直至t2时刻。若在F306步骤FOK信号到达高值HIGH,则执行第二阶段的焦点搜索程序。在t2时刻,即高速上行搜索60毫秒时间结束时,重新开始高速下行搜索操作(F307→F308→F302)。
如图14所示,在焦点第一搜索程序中包括了步骤F301至F309,20毫秒高速下行搜索操作,60毫秒高速上行搜索操作,140毫秒高速下行搜索操作,250毫秒高速上行搜索操作,300毫秒高速下行搜索操作及150毫秒高速上行搜索操作要依次进行。如果直到150毫秒的高速上行搜索操作结束,即直到t6时刻(图14),FOK信号还未到达高值(HIGH),则断定第一阶段焦点搜索操作未成功,然后重新开始焦点搜索操作(F308→F309→F301)。
步骤F304和F307在图13中作了简略描述,实际上,步骤F304中的预定就是第一次高速下行搜索操作的20毫秒,第二次高速下行搜索操作的140毫秒或第三次高速下行搜索操作的300毫秒,而F307步骤的预定时间就是第一次高速上行搜索操作的60毫秒,第二次高速上行搜索操作的250毫秒或第三次高速上行搜索操作的150毫秒。
当第一阶段焦点搜索程序失败之后再次开始焦点搜索操作的时候,搜索速度要降低,以进行如图18所示的焦点搜索操作的预定循环。比如,当第二阶段焦点搜索程序的搜索速度为S时,那么搜索速度要从4S降低到2S。
在第一阶段焦点搜索程序进行高速搜索操作过程中,实际上,在t6时刻(图14)FOK信号达到了高值(HIGH),但在此点判断焦点搜索操作是失败的并开始了第二阶段焦点搜索程序。第二阶段焦点搜索程序的搜索速度比第一阶段焦点搜索程序的速度要低,这样可以确保物镜定位在入焦点位置上,第二阶段的搜索速度近似等于图2聚焦伺服电路所执行的焦点搜索操作的搜索速度。
假设在ts1时刻,即F306步骤询问的答复为肯定时,FOK信号到达高值(HIGH),这个ts1时刻在高速上行搜索操作过程中t1和t2时刻之间。然后,系统控制器50启动第二阶段焦点搜索程序。实际上,在FOK信号到达HIGH之后高速上行搜索操作在F310步骤中要持续进行ts1和ts2之间的60毫秒时间。在ts2时刻,系统控制器50断开开关SW40并接通开关SW50,以在F312步骤把电流源50输出的电流送到执行机构4的聚焦线圈上进行低速下行搜索操作。系统控制器50监视低速下行搜索操作过程中的FOK信号与FZC信号。当低速下行搜索过程中F313步骤检测出ts3时刻FOK信号从低到高的变化和FZC信号的下陷时,系统控制器50断开开关SW10并接通开关SW20以闭合聚焦伺服环而结束焦点搜索操作,并且在步骤F315触发聚焦伺服系统。如果在图16(a)和16(c)所示的时间里,低速下行搜索操作持续了500毫秒到ts4时刻,而且FOK信号没有达到高值FZC信号没有下陷,则断定焦点搜索操作失败,结束焦点搜索操作,然后从起点重新开始焦点搜索操作(F314→F309→F302)。
下文将描述另一种方式的焦点搜索操作。假设第一阶段焦点搜索操作的高速下行搜索操作过程中,在t4与t5时刻(图14)之间的ts2时刻(图17(a)和图17(c)所示)步骤F303检测到了FOK信号从低到高的变化。此后系统控制器50启动第二阶段焦点搜索操作。在开始第二阶段焦点搜索操作之前,要在ts1时刻断开开关SW60并接通开关SW40,以在步骤F311执行高速上行搜索操作而不是图17(a)中虚线表示的高速下行搜索操作。在ts1时刻的焦点搜索方式持续60毫秒之后,在ts2时刻断开开关SW40并接通开关SW50,以在步骤312从电流源输送一电流到执行机构4的聚焦线圈进行低速下行搜索操作。
在低速下行搜索操作期间监视FOK信号和FZC信号。当在步骤F313检测到FOK信号从低到高的变化和FZC信号的下陷时,如图17(b)和17(c),就断开开关SW10并接通开关SW20以闭合聚焦伺服环结束焦点搜索操作,并在步骤F315触发聚焦伺服系统。如果在500毫秒的第二阶段低速下行搜索操作期间,FOK信号没有到达高值(HIGH)且FZC信号没有下陷,则断定焦点搜索操作未成功,在步骤F309结束焦点搜索操作,且焦点搜索程序随之返回到步骤F301,从起点重新启动焦点搜索操作。(F314→F309→F301)。
这样,在第一阶段以高速搜索方式并且在第二阶段以低速方式进行焦点搜索操作,使得在第一阶段高速方式中迅速地接近聚焦伺服启动范围,而在第二阶段低速搜索方式中确保检测到进焦点位置,因而焦点搜索操作能够快速可靠地完成。
第三实施例中的聚焦伺服系统,在开始第二阶段的低速下行搜索操作之前在两种情况都出现的条件下要进行60毫秒高速上行搜索操作,一种情况是在第一阶段高速上行搜索操作期间FOK信号到达高值(HIGH),另一种情况是在第一阶段高速下行搜索期间FOK信号到达高值(HIGH),此种聚焦伺服系统是一个适合于磁光盘记录/再现装置的工作方式。当有一束光照射到磁光盘记录表面上时,磁光记录膜和该磁光记录膜下的低层保护膜(中间层)都要产生反射。于是当物镜位于与保护膜对应的入焦点位置附近时,要产生一个错误的S形聚焦误差信号。此错误的S形聚焦误差信号幅值比依据磁光记录膜反射光而获得的真S形聚焦误差信号幅值小。当RF放大器7有AGC电路时,错误的S形聚焦误差信号和真的S形聚焦误差信号相应的幅值实际彼此相等,这引起入焦点位置检测错误。当物镜从一个位置朝着盘方向移近盘时,由于是首先得到的是真的S形聚焦误差信号,并且这样的聚焦误差检测错误可以避免,所以第三实施例中的聚焦伺服系统在第二阶段执行下行搜索操作。当聚焦伺服系统用在不会出现错误的聚焦误差检测的装置上时,聚焦伺服系统可以在第二阶段用电流源54执行低速上行搜索操作。
第三实施例中的聚焦伺服系统可以首先进行上行搜索操作,而不是20毫秒的高速下行搜索。但是由于大多数情况下在执行机构4的聚焦线圈未通电流时物镜就在入焦点位置附近了,所以当短时间下行搜索操作完成之后进行上行搜索操作的时候,在聚焦操作的早期阶段FOK信号到达高值(HIGH)的可能性比较大。
由于第三实施例中聚焦伺服系统在第一阶段逐渐扩大搜索范围,所以即使在物镜位于最靠近或最远离盘位置点进行焦点搜索操作,物镜也不会撞到盘上,且不会产生物镜与盘相撞造成的噪声。
聚焦伺服系统可以在图19(b)所示的固定搜索范围中反复进行焦点搜索操作,而不是在图19(a)所示的逐渐扩大的搜索范围中。
根据FZC信号的情况或根据FOK信号与FZC信号两者的情况而不是FOK信号的情况,可以判断出第一阶段高速搜索操作的终止。第三实施例中的聚焦伺服系统,在检测出FOK信号到达高值(HIGH)之后立即终止第一阶段高速搜索并开始第二阶段的低速搜索方式,而不是在第一阶段测出FOK信号到达高值之后60毫秒开始第二阶段低速搜索工作方式。比如可以在测到FOK信号到达高值的时刻,启动第二阶段低速搜索工作方式,而且可以在测到FOK信号到达高值时物镜所在位置周围的范围内,交替重复低速上行搜索操作和低速下行搜索操作。
尽管已经说明了本发明用于磁光记录/再现装置的情况,但本发明还可以用于那些使用小型盘或盘形记录介质的记录装置和再现装置。
虽然某种特殊程度上已经说明了本发明的优选方案,但是显然还有许多变动和变型可以属于本发明。而且应该理解,本发明可以在不脱离其精神和范围的条件下以不同于本发明所述的方式实施。
Claims (7)
1.一种聚焦伺服系统,包括:
一信号发生器(7),它通过以垂直于光学记录介质(1)的记录表面的方向使光束投射在光学记录介质(1)上,而用光学记录介质(1)记录表面反射出来的光束,产生一个以物镜(3a)位置为依据的聚焦误差信号(EF),并产生一个以光学记录介质(1)记录表面反射光束为依据的代表着光记录介质(1)读出信息的读出信号,及一个以读出信号为依据的代表着焦点获取启动范围的焦点获取启动范围信号;
一聚焦伺服机构(9),它接收来自信号发生器(7)的聚焦误差信号并完成聚焦伺服控制操作,以根据聚焦误差信号进行物镜(3a)调焦;
一零交叉点检测装置(33),它接收来自信号发生器的聚焦误差信号并检测聚焦误差信号中的零交叉点;
一搜索信号发生器(32),它产生一个下行搜索信号,以驱动物镜朝着光学记录介质(1)记录表面运动,及一个上行搜索信号以驱动物镜远离光学记录介质记录表面移动;以及
一控制机构(11),它接收来自信号发生器的焦点获取启动范围信号和来自零交叉点检测装置的零交叉点检测信号,
其特征在于,如果焦点获取启动操作没有成功完成,则所述控制机构实施一控制操作,使物镜(3a)继续远离光学记录介质(1)的记录表面。
2.根据权利要求1的聚焦伺服系统,其特征在于,控制机构提出一个质询,看看是否信号发生器(7)提供的焦点获取启动范围信号值为一预定值以及零交叉点检测器(33)提供的零交叉点检测信号是否出现,当质询的答案为肯定时即传送信号发生器提供的聚焦误差信号,来取代搜索信号发生器的搜索信号。
3.根据权利要求1或2的聚焦伺服系统,其特征在于,在测出焦点获取启动范围信号指示一焦点获取启动点而零交叉点检测信号未指示零交叉点检测的情况下,所述控制机构实施所述控制操作。
4.一种焦点获取启动方法,包括步骤:
借助于焦点搜索信号,驱动物镜(3a)从其初始位置移动而远离光学记录介质的记录表面;
在物镜移动远离光学记录介质记录表面的过程中,依据焦点误差信号中零交叉点被测到时所提供的零交叉点检测信号,检测出焦点获取启动点及代表着焦点获取启动范围的焦点获取启动范围信号;
依据焦点获取启动点检测完成之后提供的焦点获取启动范围信号值,或依据代表着从光学记录介质中读出的信息的信号,确认焦点获取启动操作是否已获成功;以及
在经判断焦点获取启动操作没有成功完成时,继续移动物镜远离光学记录介质记录表面。
5.根据权利要求4的焦点获取启动方法,其特征在于,物镜(3a)从初始位置移动进一步远离光学记录介质的记录表面,当预定时间内不能获取焦点时,物镜移到靠近光学记录介质(1)记录表面的位置,然后再次执行焦点获取启动操作。
6.根据权利要求5的焦点获取启动方法,其特征在于,物镜(3a)依据焦点搜索信号开始从初始位置移向靠近光学记录介质记录表面的位置之后,物镜(3a)移动远离光学记录介质(1)记录表面而去。
7.根据权利要求6的焦点获取启动方法,其特征在于,在物镜(3a)从初始位置移向靠近光学记录介质(1)记录表面的位置期间得到的焦点误差信号中检测出零交叉点,依据此零交叉点的零交叉点检测信号检测出焦点获取启动点,并且焦点获取启动范围信号代表着焦点获取启动的范围;
根据焦点获取启动点测完之后得到的焦点获取启动范围信号的值,或根据表示光学记录介质读出信息的信号,询问焦点获取启动操作是否成功;以及
在询问的答案为否定时,继续移动物镜(3a)进一步向靠近光学记录介质(1)记录表面的位置行进。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP9832393A JPH06290466A (ja) | 1993-04-02 | 1993-04-02 | フォーカスサーボ装置 |
| JP098323/1993 | 1993-04-02 | ||
| JP098323/93 | 1993-04-02 | ||
| JP246113/93 | 1993-09-08 | ||
| JP24611393A JPH0778343A (ja) | 1993-09-08 | 1993-09-08 | フォーカスサーボ装置 |
| JP246113/1993 | 1993-09-08 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN03122331A Division CN1450537A (zh) | 1993-04-02 | 2003-04-29 | 聚焦伺服系统与获取焦点伺服的启动方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1099144A CN1099144A (zh) | 1995-02-22 |
| CN1125444C true CN1125444C (zh) | 2003-10-22 |
Family
ID=26439515
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN94105277A Expired - Fee Related CN1125444C (zh) | 1993-04-02 | 1994-04-01 | 聚焦伺服系统与获取焦点伺服的启动方法 |
| CN03122331A Pending CN1450537A (zh) | 1993-04-02 | 2003-04-29 | 聚焦伺服系统与获取焦点伺服的启动方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN03122331A Pending CN1450537A (zh) | 1993-04-02 | 2003-04-29 | 聚焦伺服系统与获取焦点伺服的启动方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US5745450A (zh) |
| EP (2) | EP0840304B1 (zh) |
| KR (1) | KR100380879B1 (zh) |
| CN (2) | CN1125444C (zh) |
| DE (2) | DE69425385T2 (zh) |
| MY (1) | MY131558A (zh) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5729511A (en) * | 1991-02-15 | 1998-03-17 | Discovision Associates | Optical disc system having servo motor and servo error detection assembly operated relative to monitored quad sum signal |
| US6069857A (en) | 1991-02-15 | 2000-05-30 | Discovision Associates | Optical disc system having improved circuitry for performing blank sector check on readable disc |
| JP3465413B2 (ja) * | 1995-06-16 | 2003-11-10 | ソニー株式会社 | 光ディスク駆動装置およびフォーカス制御方法 |
| KR0162385B1 (ko) * | 1995-08-05 | 1998-12-15 | 구자홍 | 멀티-레이어 디스크의 포커스 서보장치 및 방법 |
| JPH1049968A (ja) * | 1996-07-26 | 1998-02-20 | Mitsumi Electric Co Ltd | 書込み専用光ディスクドライブ装置 |
| KR100197631B1 (ko) * | 1996-11-29 | 1999-06-15 | 윤종용 | 트래킹밸런스 보정장치 |
| JPH11110956A (ja) * | 1997-09-30 | 1999-04-23 | Sony Corp | 信号再生装置及び方法、並びに信号記録再生装置及び方法 |
| KR100396947B1 (ko) * | 1998-11-12 | 2003-11-15 | 주식회사 대우일렉트로닉스 | 광 디스크 시스템의 포커스 서보 제어방법 |
| JP3758412B2 (ja) * | 1999-04-08 | 2006-03-22 | 富士通株式会社 | 光記憶装置とフォーカスサーボ制御方法 |
| JP3708362B2 (ja) * | 1999-04-27 | 2005-10-19 | 松下電器産業株式会社 | 光ディスク装置のピックアップ制御装置 |
| JP3734640B2 (ja) * | 1999-04-30 | 2006-01-11 | ローム株式会社 | 光ディスク再生装置 |
| JP2001060326A (ja) * | 1999-08-24 | 2001-03-06 | Sanyo Electric Co Ltd | ディスク装置 |
| JP3719075B2 (ja) * | 1999-12-13 | 2005-11-24 | 松下電器産業株式会社 | 光ディスク装置 |
| TW484128B (en) * | 2000-01-12 | 2002-04-21 | Sony Corp | Optical disc apparatus |
| JP2002140823A (ja) * | 2000-11-02 | 2002-05-17 | Sony Corp | フォーカスサーチ装置及びフォーカスサーチ方法 |
| CN1808594A (zh) * | 2001-04-20 | 2006-07-26 | 松下电器产业株式会社 | 光盘设备 |
| US7187630B2 (en) * | 2001-06-11 | 2007-03-06 | Mitutoyo Corporation | Focusing servo device and focusing servo method |
| JP4257049B2 (ja) * | 2001-07-06 | 2009-04-22 | パイオニア株式会社 | 多層ディスク記録再生装置およびフォーカスジャンプ方法 |
| JP4329539B2 (ja) * | 2001-07-26 | 2009-09-09 | ソニー株式会社 | 光ディスク記録再生装置とそのフォーカス処理方法および光ディスク記録媒体 |
| US7616537B2 (en) * | 2002-11-07 | 2009-11-10 | Samsung Electronics Co., Ltd. | Focus search apparatus and method |
| JP2004288292A (ja) | 2003-03-20 | 2004-10-14 | Victor Co Of Japan Ltd | フォーカスサーチ方法及び光ディスク装置 |
| TWI222628B (en) * | 2003-07-09 | 2004-10-21 | Mediatek Inc | Method of vertical deviation disc detection |
| CN100431017C (zh) * | 2003-12-01 | 2008-11-05 | 松下电器产业株式会社 | 控制装置及具备控制装置的光盘装置 |
| TWI277078B (en) * | 2005-05-20 | 2007-03-21 | Sunplus Technology Co Ltd | Focusing servo device, optical disc recording/reproducing device and focus-searching method |
| TW200719338A (en) * | 2005-11-10 | 2007-05-16 | Lite On It Corp | Optical disc drive and focus control method thereof |
| US7706790B2 (en) * | 2006-04-04 | 2010-04-27 | Kyocera Corporation | System scanning method and arrangement for mobile wireless communication devices |
| JP4784557B2 (ja) * | 2007-05-29 | 2011-10-05 | 株式会社日立製作所 | ディスク装置 |
| JP2015088205A (ja) * | 2013-10-31 | 2015-05-07 | 船井電機株式会社 | 光ディスク装置、及び、そのフォーカス制御方法 |
| KR20230055530A (ko) | 2021-10-19 | 2023-04-26 | (주)와이비테크 | 색소가 사용되지 않는 불투명 플라스틱병 제조방법 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5694528A (en) * | 1979-12-28 | 1981-07-31 | Matsushita Electric Ind Co Ltd | Drawing-in method of focus servo |
| JPH0644347B2 (ja) * | 1980-11-27 | 1994-06-08 | 松下電器産業株式会社 | 光学的記録再生装置 |
| JPS58101330U (ja) * | 1981-12-25 | 1983-07-09 | パイオニア株式会社 | 光学装置におけるフオ−カスサ−ボ引込装置 |
| JPS60226029A (ja) * | 1984-04-24 | 1985-11-11 | Sony Corp | 光学式デイスク・プレ−ヤ |
| DE3508525A1 (de) * | 1985-03-09 | 1986-09-11 | Thomson Brandt Gmbh | Fokus-such-einrichtung fuer beruehrungslose abtastung |
| US4998233A (en) * | 1988-02-12 | 1991-03-05 | International Business Machines Corporation | Acquiring focus in optical systems using a focus error signal and a laser drive signal |
| JPH0276128A (ja) * | 1988-09-13 | 1990-03-15 | Pioneer Electron Corp | フォーカスサーボ引込み方法 |
| JPH02246026A (ja) * | 1989-03-18 | 1990-10-01 | Pioneer Electron Corp | フォーカスサーボループのループゲイン設定方法 |
| US5113384A (en) * | 1989-09-25 | 1992-05-12 | Hewlett-Packard Company | Focus capture method for magneto-optic disk drives |
| US5162661A (en) * | 1990-02-08 | 1992-11-10 | Pioneer Electronic Corporation | Position detector for maintaining a fixed distance between two objects |
| JP2672703B2 (ja) * | 1990-10-04 | 1997-11-05 | アルパイン株式会社 | フォーカスサーボ制御装置 |
| US5352881A (en) * | 1992-05-08 | 1994-10-04 | Olympus Optical Co., Ltd. | Focus control device in optical recording and reproducing apparatus having an optical-beam-position judging device |
| JPH06103533B2 (ja) * | 1992-10-21 | 1994-12-14 | インターナショナル・ビジネス・マシーンズ・コーポレイション | フォーカス引き込み方法および光ディスク駆動装置 |
-
1994
- 1994-03-31 DE DE69425385T patent/DE69425385T2/de not_active Expired - Fee Related
- 1994-03-31 MY MYPI94000784A patent/MY131558A/en unknown
- 1994-03-31 EP EP98100316A patent/EP0840304B1/en not_active Expired - Lifetime
- 1994-03-31 EP EP94105187A patent/EP0618569B1/en not_active Expired - Lifetime
- 1994-03-31 DE DE69418761T patent/DE69418761T2/de not_active Expired - Fee Related
- 1994-04-01 KR KR1019940006877A patent/KR100380879B1/ko not_active IP Right Cessation
- 1994-04-01 CN CN94105277A patent/CN1125444C/zh not_active Expired - Fee Related
-
1997
- 1997-02-18 US US08/801,547 patent/US5745450A/en not_active Expired - Fee Related
- 1997-02-28 US US08/808,667 patent/US5912867A/en not_active Expired - Fee Related
-
2003
- 2003-04-29 CN CN03122331A patent/CN1450537A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| KR940024711A (ko) | 1994-11-18 |
| KR100380879B1 (ko) | 2003-12-24 |
| CN1099144A (zh) | 1995-02-22 |
| US5745450A (en) | 1998-04-28 |
| EP0618569B1 (en) | 1999-06-02 |
| CN1450537A (zh) | 2003-10-22 |
| EP0840304B1 (en) | 2000-07-26 |
| MY131558A (en) | 2007-08-30 |
| DE69418761D1 (de) | 1999-07-08 |
| DE69418761T2 (de) | 1999-10-21 |
| EP0840304A1 (en) | 1998-05-06 |
| US5912867A (en) | 1999-06-15 |
| DE69425385D1 (de) | 2000-08-31 |
| EP0618569A1 (en) | 1994-10-05 |
| DE69425385T2 (de) | 2001-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1125444C (zh) | 聚焦伺服系统与获取焦点伺服的启动方法 | |
| KR100695356B1 (ko) | 디스크 드라이브 장치 | |
| JP2009170101A (ja) | 光ディスク装置 | |
| WO2002082433A1 (fr) | Appareil à disque optique | |
| JP3869998B2 (ja) | キャリッジサーボ装置及び情報再生装置 | |
| JPH1139664A (ja) | 多層光記録媒体用フォーカス制御装置 | |
| US7009917B2 (en) | Layer jump control for an optical drive | |
| JPH09147379A (ja) | ピックアップ制御装置 | |
| JPH08147876A (ja) | 記録再生装置及び記録再生方法 | |
| CN1825444A (zh) | 信息的记录装置及再现装置、信息的记录方法及再现方法 | |
| CN100395830C (zh) | 回放装置和跳层方法 | |
| WO2000030083A1 (fr) | Appareil d'enregistrement et/ou de reproduction de disque optique, et procede d'acces | |
| CN1122270C (zh) | 光盘跟踪控制装置和方法 | |
| WO2004032125A1 (ja) | 光ディスク装置 | |
| JP5254523B2 (ja) | トラックジャンプ方法 | |
| JP2003168268A (ja) | 光ピックアップ送り装置 | |
| CN1059286C (zh) | 光学信息再现装置的速度控制方法 | |
| EP0315470A2 (en) | Focus search drive apparatus for an optical disc player | |
| JP3937351B2 (ja) | 光ディスク再生装置 | |
| KR100606671B1 (ko) | 광 기록재생기의 액츄에이터 진동 방지 방법 | |
| KR100628184B1 (ko) | 광 기록재생기의 액츄에이터 제어 장치 | |
| WO2007040055A1 (ja) | サーボ制御装置、サーボ制御方法、およびサーボ制御プログラム | |
| JP3812610B2 (ja) | 情報記録再生装置および方法 | |
| KR20010010588A (ko) | 트랙 점프 방법 | |
| JPH11328684A (ja) | 光ディスク種類判別方法及び光ディスク装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |