BRPI0717522B1 - Dispositivo de controle de amortecimento de vibração de um veículo e dispositivo para estimar um torque de roda que atua entre uma roda de um veículo e uma superfície de estrada - Google Patents
Dispositivo de controle de amortecimento de vibração de um veículo e dispositivo para estimar um torque de roda que atua entre uma roda de um veículo e uma superfície de estrada Download PDFInfo
- Publication number
- BRPI0717522B1 BRPI0717522B1 BRPI0717522-1A BRPI0717522A BRPI0717522B1 BR PI0717522 B1 BRPI0717522 B1 BR PI0717522B1 BR PI0717522 A BRPI0717522 A BR PI0717522A BR PI0717522 B1 BRPI0717522 B1 BR PI0717522B1
- Authority
- BR
- Brazil
- Prior art keywords
- wheel
- torque
- vehicle
- value
- estimated
- Prior art date
Links
- 238000013016 damping Methods 0.000 title claims abstract description 94
- 230000010355 oscillation Effects 0.000 claims abstract description 42
- 238000012937 correction Methods 0.000 claims description 32
- 230000001788 irregular Effects 0.000 claims description 8
- 230000033001 locomotion Effects 0.000 abstract description 38
- 230000014509 gene expression Effects 0.000 description 31
- 238000006073 displacement reaction Methods 0.000 description 8
- 239000011159 matrix material Substances 0.000 description 8
- 238000005096 rolling process Methods 0.000 description 8
- 230000001133 acceleration Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 238000011156 evaluation Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000006872 improvement Effects 0.000 description 3
- 230000009191 jumping Effects 0.000 description 3
- 239000000725 suspension Substances 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000002485 combustion reaction Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000005194 fractionation Methods 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000006557 surface reaction Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 230000003542 behavioural effect Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/016—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by their responsiveness, when the vehicle is travelling, to specific motion, a specific condition, or driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/0195—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the regulation being combined with other vehicle control systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/20—Reducing vibrations in the driveline
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/01—Attitude or posture control
- B60G2800/014—Pitch; Nose dive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/16—Running
- B60G2800/164—Heaving; Squatting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/18—Starting, accelerating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/22—Braking, stopping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0019—Control system elements or transfer functions
- B60W2050/0028—Mathematical models, e.g. for simulation
- B60W2050/0031—Mathematical model of the vehicle
- B60W2050/0035—Multiple-track, 3D vehicle model, e.g. including roll and pitch conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/26—Wheel slip
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/30—Wheel torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/10—Change speed gearings
- B60W2710/105—Output torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/30—Wheel torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/11—Pitch movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/112—Roll movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/114—Yaw movement
Abstract
dispositivo de controle de amortecimento de vibração de um veículo e dispositivo para estimar um torque de roda que atua entre uma roda de um veículo e uma superfície de estrada a presente invenção refere-se a um dispositivo de controle de amortecimento de vibração o qual suprime uma vibração de oscilação e saltos de um veículo através de um controle de saída de tração com base em um valor estimado de torque de roda estimado com uma velocidade de roda, etc, cujo dispositivo utiliza o valor estimado de um torque de roda enquanto levando em conta as condições onde nenhuma boa estimativa do torque de roda é executável. o dispositivo de controle de amortecimento de vibração compreende uma porção de aquisição de valor estimado de torque de roda a qual adquire um valor estimado de torque de roda; e uma porção de controle de torque motriz a qual controla um torque motriz do veículo para suprimir as amplitudes de oscilação da vibração e saltos com base no valor estimado de torque de roda, em que valor absoluto ou o sinal do valor estimado de torque de roda é corrigido de acordo com o grau de um deslizamento da roda ou a direção de movimento do veículo. ainda, está provido um dispositivo de estimativa de torque adequado para um controle de amortecimento de vibração e outros controles de funcionamento, de movimento ou de força de frenagem - tracionamento para um veículo, etc.
Description
[0001] A presente invenção refere-se a um dispositivo de controle de amortecimento de vibração de um veículo, tal como um automóvel, mais especificamente, a um dispositivo de controle de amortecimento de vibração o qual controla uma saída de tração (uma força motriz ou um torque motriz) de um veículo de modo a suprimir as vibrações de uma carroceria de veículo, e a um dispositivo que estima um torque de roda durante o funcionamento de um veículo, vantajosamente utilizado para o dito dispositivo.
[0002] As forças de frenagem e de tração (ou uma força inercial) e/ou outras forças externas que atuam sobre uma carroceria de veículo na aceleração e na desaceleração de um veículo para causar uma vibração de oscilação - saltos, etc durante o funcionamento do veículo, são refletidas em um torque que atua entre uma roda (especificamente uma roda de tração durante o funcionamento) e uma superfície de estrada (referido como "torque de roda" neste relatório descritivo). Então, no campo do controle de amortecimento de vibração de um veículo, é proposto suprimir a vibração de uma carroceria de veículo durante o funcionamento de um veículo pelo ajuste de um torque de roda através de um controle de uma saída de tração de um motor ou outro dispositivo motriz do veículo (Por exemplo, vide as Publicações de Patente Japonesa Abertas à Inspeção Pública 2004-168148 e 2006-69472). Em tal controle de amortecimento de vibração através de um controle de saída de tração, a vibração de oscilação - saltos, a qual surge em uma carroceria de veículo quando uma demanda de aceleração ou de desaceleração de um veículo é feita ou quando uma força externa (um distúrbio) atuou sobre a carroceria de veículo para variar o torque de roda, é predita pela utilização de um modelo de movimento construído com base na suposição de um modelo dinâmico para a assim denominada vibração de massa suspensa ou vibração de massa suspensa e massa não- suspensa de uma carroceria de veículo, e então, a saída de torque de um dispositivo de torque de um veículo é ajustada de modo a suprimir a vibração predita. No caso de tal tipo de controle de amortecimento de vibração, a geração de energia vibracional é suprimida pelo ajuste da fonte da força de geração de vibração, ao invés de absorver a energia vibracional gerada como no controle de amortecimento de vibração por suspensões, e portanto, o efeito de amortecimento de vibração relativamente imediato e uma boa eficiência de energia são vantajosamente obtidos. Ainda, no controle de amortecimento de vibração através do controle de saída de tração, o objeto a ser controlado é focalizado na saída de tração (torque motriz) de um dispositivo motriz, e assim, o ajuste no controle é relativamente fácil.
[0003] Em tal dispositivo de controle de amortecimento de vibração (ou um dispositivo de controle de força motriz) que executa um controle de amortecimento de vibração através de um controle de saída de tração como acima descrito, o torque de roda realmente gerado em uma roda de tração deve ser utilizado como um parâmetro de entrada de um retorno para a supressão de um distúrbio no controle. Geralmente, no entanto, um sensor o qual pode detectar diretamente um valor de torque de rodas durante o funcionamento de um veículo, por exemplo, um sensor de torque de roda, um medidor de componente de seis forças da roda, etc, não está instalado em veículos normais, exceto um veículo para teste (vide JP 2005-69897), devido a problemas nos projetos ou nos custos de veículos, Assim, em um dispositivo de controle de amortecimento de vibração como acima descrito, um valor de torque de roda estimado, estimado com base em uma velocidade de roda, uma velocidade rotacional de um eixo de entrada de um dispositivo motriz de um veículo e/ou outros parâmetros facilmente detectáveis, é empregado para o valor de torque de roda a ser retroalimentado como uma entrada de distúrbio. Tal valor estimado de torque de roda, obtido com base em uma velocidade de roda, etc, é monitorado em vários controles tais como TRC (Controle de Tração), ABS, VSC (Controle de Estabilidade de Veículo), VDIM (Sistema de Gerenciamento Integrado de Dinâmica de Veículo) para os propósitos de monitorar uma força de reação de superfície de estrada sobre uma roda ou um teste de um desempenho de funcionamento de um veículo (por exemplo, vide JP H11-37872).
[0004] No dispositivo de controle de amortecimento de vibração como acima descrito, ou também em vários tipos de outros controles de um veículo para o seu funcionamento, movimento, ou força de frenagem - tração, quando um torque de roda não é detectado diretamente mas obtido através de uma estimativa utilizando parâmetros, tais como uma velocidade de roda, a precisão da estimativa pode tornar-se pior dependendo de uma condição operacional de uma roda ou um pneu, e por meio disto, um controle de um veículo pode não funcionar bem. Por exemplo, quando um torque de roda é estimado com base em um valor detectado de uma velocidade de roda, a precisão de estimativa pode piorar se uma roda (uma roda de tração durante o acionamento de um veículo) cai para um estado de deslizamento. Mais ainda, apesar da maioria dos sensores de velocidade de roda correntemente utilizados para os veículos usuais detectar uma velocidade rotacional de uma roda, a direção de sua rotação (isto é, se a roda está rolando para frente ou para trás em relação à direção de movimento do veículo) não pode ser julgada, e assim, em um processamento de controle, é possível utilizar erroneamente um torque de roda a ser estimado com relação à sua direção. Especialmente, no caso do controle executar o amortecimento de vibração de oscilação e/ou saltos através do controle de uma saída de tração como acima descrito, quando a magnitude e/ou a direção de um valor estimado de um torque de roda diferem daqueles de um torque de roda o qual foi realmente gerado em uma roda, nenhum bom efeito de amortecimento de vibração é obtido, e ao contrário, é possível que a vibração seja amplificada. No entanto, o dispositivo de controle de amortecimento de vibração convencional de um veículo e/ou outros dispositivos de controle do funcionamento, do movimento ou da força de frenagem - tração de um veículo que emprega o valor estimado de um torque de roda como um parâmetro, uma condição onde uma boa estimativa de um torque de roda não é executada é raramente considerada.
[0005] Assim, um dos objetivos principais da presente invenção é prover um dispositivo para estimar um torque de roda o qual é visto em um dispositivo de controle de amortecimento de vibração como acima descrito, em que, em um caso que nenhuma boa estimativa de um torque de roda é executável, enquanto considerando isto, o dispositivo gera um valor estimado de um torque de roda.
[0006] Ainda, outro objetivo da presente invenção é prover um dispositivo o qual controla um torque motriz de um veículo para executar um controle de amortecimento de vibração durante o funcionamento de um veículo com base em um valor de torque de roda estimado por um dispositivo de estimativa de torque de roda como acima descrito, em que, em um caso em que nenhuma boa estimativa de um torque de roda é executável, enquanto considerando isto, o dispositivo utiliza um valor estimado de um torque de roda.
[0007] De acordo com a presente invenção, resumidamente, está provido um dispositivo de estimativa de torque de roda construído de modo a corrigir apropriadamente um valor estimado de torque de roda quando a magnitude ou a direção de um valor estimado de um torque de roda desvia daquelas do valor de torque que atua realmente sobre uma roda devido a várias razões em um controle de amortecimento de vibração e/ou outros controles de funcionamento, de movimento ou de força de frenagem - tração de um veículo, utilizando um valor estimado de um torque de roda sem a utilização de um sensor de torque, etc para medir o torque de roda, e um dispositivo de controle de amortecimento de vibração de um veículo que utiliza tal valor corrigido, estimado de um torque de roda.
[0008] De acordo com um dos aspectos do dispositivo de estimativa de torque de roda da invenção, um dispositivo o qual estima um torque de roda o qual atua entre uma roda de um veículo e uma superfície de estrada está caracterizado por compreender uma porção de estimativa de torque a qual estima um valor estimado de um torque de roda gerado em um local de contato de solo de uma roda sobre uma superfície de estrada; uma porção de computação de quantidade de estado de deslizamento a qual computa uma quantidade de estado de deslizamento de roda a qual indica uma condição de deslizamento de uma roda; e uma porção de correção de torque de roda a qual corrige o valor estimado de um torque de roda de modo que o valor absoluto do valor estimado de um torque de roda torne-se menor quando um grau de um deslizamento indicado pela quantidade de estado de deslizamento de roda é maior. Neste aspecto, nesta especificação, "O estado de deslizamento ou condição de uma roda" significa uma condição em que uma força a qual uma roda exerce sobre uma superfície de estrada excede além de um limite de aderência (o círculo de atrito máximo) da roda (ou de um pneu) durante o funcionamento de um veículo, por meio de que a roda "desliza" sobre a superfície de estrada, e "o grau de um deslizamento" corresponde à magnitude de uma força de atrito entre uma superfície de roda e uma superfície de estrada em um estado de deslizamento (Quando um deslizamento relativo ocorre entre a superfície de roda e a superfície de estrada, o deslizamento entre a superfície de roda e a superfície de estrada torna-se maior conforme a força de atrito diminui). Um valor estimado de torque de roda é, apesar de dependente de modos de estimativa, usualmente computado na suposição de que uma roda adere na superfície de estrada. No entanto, se a roda cai em um estado de deslizamento, a dita suposição torna-se inválida e a precisão de um valor estimado de torque de roda ficaria pior. Assim, no dispositivo de estimativa de torque de roda da invenção, a "quantidade de estado de deslizamento" a qual indica a condição de deslizamento de uma roda é computada, e, conforme o grau de um deslizamento indicado pela quantidade de estado de deslizamento de roda torna-se maior, um valor estimado de torque de roda é corrigido de modo que o seu valor absoluto torna-se menor. O valor estimado de torque de roda é estimado na suposição que a roda adere à superfície de estrada, mas, se a roda deslizar, a força ou torque transmitido da superfície de estrada para a roda será reduzida. Assim, quando uma roda está em um tal estado de deslizamento, o valor estimado de torque de roda é esperado tornar-se mais próximo de um valor real.
[0009] Deve ser compreendido que, para a "quantidade de estado de deslizamento de roda" que indica uma condição de deslizamento de uma roda, uma quantidade arbitrária pode ser empregada como um valor de índice que permite a detecção da transição de um estado de aderência para um estado de deslizamento em uma roda. Por exemplo, uma razão de deslizamento de uma roda ou uma razão de deslizamentos pode ser utilizada como uma quantidade de estado de deslizamento de roda (apesar da palavra de um "deslizamento" ser utilizada nestes termos, neste caso, independentemente se um pneu adere a uma superfície de estrada ou não, "deslizamento" significa um espaço entre uma velocidade de veículo e uma velocidade de roda (um valor obtido pela multiplicação de uma velocidade rotacional de uma roda e um raio de roda), e portanto, o significado de "deslizamento" é diferente daquele no caso em que uma roda desliza sobre uma superfície de estada como no acima mencionado "estado de deslizamento"), mas de preferência, por exemplo, durante o funcionamento de um veículo, a razão de uma velocidade da roda de uma roda de tração é uma velocidade da roda de uma roda acionada (roda louca) de um veículo pode ser utilizada como uma quantidade de estado de deslizamento de roda (na aceleração de um veículo, independentemente se a roda de tração está ou não em um estado de aderência, a velocidade da roda de uma roda acionada é um valor que corresponde a uma velocidade de veículo, mas a velocidade da roda de uma roda de tração quando caindo em um estado de deslizamento não mais corresponde a uma velocidade de veículo).
[00010] No dispositivo de estimativa de torque de roda acima mencionado, apesar da estimativa de um valor estimado de torque de roda poder ser executado através de processos arbitrários, tipicamente, como explicado em uma modalidade da presente invenção posteriormente descrita, a estimativa pode ser executada com base em uma velocidade de roda (ou uma velocidade rotacional de roda) detectada com um sensor de velocidade da roda de uma roda de um veículo. Neste caso, durante o funcionamento de um veículo, um valor estimado de torque de roda pode ser computado com uma função de um valor diferencial de uma velocidade da roda de uma roda de tração.
[00011] Em outro aspecto de um dispositivo de estimativa de torque de roda, o dispositivo da invenção compreende uma porção de estimativa de torque a qual estima um valor estimado de torque de roda com base em uma velocidade de roda detectada por um sensor de velocidade da roda de uma roda; e uma porção de correção de torque de roda a qual corrige um valor estimado de torque de roda para um valor negativo durante o deslocamento inverso de um veículo. Como resumidamente notado acima, na estimativa de um valor estimado de torque de roda com base em uma velocidade de roda dado por um sensor de velocidade de roda, a maioria dos sensores de velocidade de roda instalados nos veículos usuais, de produção em massa, exceto alguns sensores de alta classe, não podem detectar a direção rotacional de uma roda. Assim, em um controle o qual utiliza um torque de roda como uma de suas entradas, se o valor estimado de torque de roda de um sensor de velocidade de roda for diretamente utilizado, poderia acontecer que a contribuição do torque de roda seria refletida na direção oposta quando a roda gira (está rolando) para trás durante o deslocamento inverso de um veículo, etc. Então, para um dos aspectos da correção de um valor estimado de torque de roda na presente invenção, quando uma roda gira para trás como acima descrito (o deslocamento inverso de um veículo ou a rotação para trás de uma roda pode ser julgado com a posição de uma alavanca de marchas ou uma chave para uma marcha de mudança do veículo), um valor estimado de torque de roda é corrigido por um valor negativo (enquanto mantendo a sua magnitude como está). Neste aspecto, deve ser compreendido que, de preferência, a correção de tornar um valor estimado de torque de roda em um valor negativo pode ser executada juntamente com a correção com base em uma quantidade de estado de deslizamento de roda.
[00012] Na presente invenção, um valor estimado de torque de roda para o qual a correção com base em uma quantidade de estado de deslizamento de roda e/ou a correção do deslocamento inverso de um veículo como acima descrito são executados, é vantajosamente utilizado especialmente em um dispositivo de controle de amortecimento de vibração de um veículo o qual suprime a vibração de oscilação ou saltos do veículo através do controle de um torque motriz do veículo. Assim, em um aspecto do dispositivo de controle de amortecimento de vibração da invenção, um dispositivo de controle de amortecimento de vibração de um veículo compreende uma porção de aquisição de valor estimado de torque de roda a qual adquire um valor estimado de um torque de roda gerado sobre um local de contato de solo de uma roda de um veículo a uma superfície de estrada e que atua sobre a roda; e uma porção de controle de torque motriz a qual controla um torque motriz de veículo para suprimir as amplitudes de oscilação da vibração e saltos com base no valor estimado de torque de roda, em que uma porção de aquisição de quantidade de estado de deslizamento a qual adquire uma quantidade de estado de deslizamento de roda que indica uma condição de deslizamento de uma roda está provida; um valor absoluto do valor estimado de torque de roda ou uma variável controlada de um torque motriz é corrigido menor como um grau de um deslizamento expresso pela quantidade de estado de deslizamento de roda é maior; e um torque motriz do veículo é controlado com referência ao valor estimado de torque de roda corrigido. Ainda, para um aspecto alternativo, em tal dispositivo de controle de amortecimento de vibração de veículo que tem uma porção de aquisição de valor estimado de torque de roda e uma porção de controle de torque motriz como acima descrito, no caso em que um torque de roda é estimado com base em uma velocidade de roda detectada com um sensor de velocidade de roda, o valor estimado de torque de roda adquirido pela porção de aquisição de valor estimado de torque de roda pode ser corrigido para um valor negativo durante o deslocamento inverso do veículo, e com referência ao valor estimado de torque de roda corrigido, o torque motriz do veículo pode ser controlado. Neste aspecto, o dispositivo de controle de amortecimento de vibração acima mencionado pode utilizar um valor estimado de torque de roda gerado por um dispositivo outro que o dispositivo de controle de amortecimento de vibração, e também, um dispositivo de estimativa de torque ou um meio para gerar um valor estimado de torque de roda pode ser estabelecido no interior dispositivo de controle de amortecimento de vibração e o valor estimado ali gerado pode ser corrigido.
[00013] Como explicado em mais detalhes na modalidade abaixo mencionada da presente invenção, por exemplo, o dispositivo de controle de amortecimento de vibração de veículo acima mencionado o qual suprime a vibração de oscilação ou saltos de um veículo através do controle de um torque motriz do veículo pode ser um dispositivo o qual ajusta um torque de roda, isto é, um torque motriz do veículo de modo a reduzir a amplitude de vibração de massa suspensa e/ou vibração de massa não-suspensa de uma carroceria de veículo com base em um modelo de movimento dinâmico, o qual é assumido para a vibração de massa suspensa ou vibração de massa não- suspensa de uma carroceria de veículo durante o funcionamento do veículo enquanto um torque de roda é considerado como uma força externa que induz a vibração de oscilação ou saltos na carroceria de veículo. Um valor estimado de torque de roda é inserido como o retorno ou o distúrbio neste controle de amortecimento de vibração, em que o valor estimado de torque de roda será corrigido no mesmo modo que no dispositivo de estimativa de torque de roda acima mencionado quando a roda está em um estado de deslizamento ou gira para trás. Como pode ser compreendido da explicado do dispositivo de estimativa de torque de roda acima mencionado, através da correção do valor estimado de torque de roda durante uma roda estando em um estado de deslizamento ou girando para trás, como esperado, o valor estimado de torque de roda utilizado para o dispositivo de controle de amortecimento de vibração se tornará mais próximo de um valor de torque de roda real com relação à sua magnitude e/ou direção e portanto, mesmo quando nenhuma boa estimativa de um torque de roda não puder ser feita, um bom controle de amortecimento de vibração é esperado ser conseguido. Neste aspecto, deve ser compreendido que o conceito técnico para a correção de um valor estimado de torque de roda na presente invenção pode ser aplicado para os dispositivos de controle de amortecimento de vibração que utilizam um valor estimado de torque de roda outro que o dispositivo de controle de amortecimento de vibração acima descrito, e tais casos estão dentro do escopo da presente invenção.
[00014] No dispositivo de controle de amortecimento de vibração através de um controle de torque motriz de um veículo no aspecto acima mencionado da presente invenção, em um caso que um valor estimado de torque de roda é um valor estimado com base em uma velocidade de roda detectada com um sensor de velocidade da roda de uma roda de tração de um veículo, se o sensor de velocidade de roda não funcionar apropriadamente, um valor estimado de torque de roda pode ser corrigido para ser um valor estimado com base em uma velocidade rotacional de um eixo de saída de um dispositivo de tração do veículo. Teoricamente, uma velocidade de roda e uma velocidade rotacional de um eixo de saída de um dispositivo de tração de um veículo correlacionam uma com a outra (se a velocidade de roda mudar devido a um certo fator, a "velocidade rotacional" do eixo de saída do dispositivo de tração deve mudar), e assim, quando uma irregularidade surge no sensor de velocidade de roda e uma velocidade de roda não puder ser detectada com uma precisa suficiente, um valor estimado de torque de roda é adquirido com base em uma velocidade rotacional de um eixo de saída de um dispositivo de tração através da relação entre a velocidade de roda e a velocidade rotacional do eixo de saída do dispositivo de tração do veículo, e por meio disto, o controle de amortecimento de vibração pode ser executado também quando uma irregularidade ocorre em um sensor de velocidade de roda.
[00015] Ainda, no dispositivo de controle de amortecimento de vibração acima mencionado, quando é julgado que nenhum bom controle de amortecimento de vibração é executável mesmo com a execução da correção de um valor estimado de torque de roda, o controle de um torque motriz com base no valor estimado de torque de roda pode ser parado. Mais ainda, os efeitos do controle de amortecimento de vibração são para uma estabilidade operacional de um veículo e o aperfeiçoamento em um conforto de deslocamento, e portanto, se for julgado que não é necessário executar o controle de amortecimento de vibração quando uma roda está em um estado de deslizamento, durante o deslocamento inverso de um veículo e/ou quando uma irregularidade ocorre em um sensor de velocidade de roda, o controle de um torque motriz com base em um valor estimado de torque de roda pode ser parado. Especialmente, o dispositivo pode ser adaptado para parar o controle de um torque motriz com base em um valor estimado de torque de roda quando a roda está em um estado de deslizamento e o grau de um deslizamento indicado por uma quantidade de estado de deslizamento de roda é maior do que um grau predeterminado. De acordo com tal estrutura, a ocorrência da amplificação de vibração devido a uma entrada de um valor de torque impróprio no controle de amortecimento de vibração será inibida.
[00016] Incidentalmente, nos veículos, tais como os automóveis em anos recentes, estão instalados dispositivos de controle os quais controlam um sistema de frenagem de um veículo, por exemplo, os dispositivos de controle de VSC, TRC, VDIM, ABS, etc (daqui em diante, referidos como um "dispositivo de controle de frenagem"). Estes dispositivos de controle de frenagem computam uma "quantidade de estado de deslizamento de roda" a qual indica uma condição de deslizamento de uma roda como acima descrito, e, com base no valor computador, executam os controles de acordo com os respectivos processo de controle, tal como um controle para diminuir uma razão de deslizamento de uma roda. Assim, o dispositivo de controle de amortecimento de vibração da invenção pode ser adaptado para utilizar a "quantidade de estado de deslizamento de roda" computada por um dispositivo de controle de frenagem como acima descrito, por meio disto provendo a simplificação ou o aperfeiçoamento da eficiência na estrutura do controle em um veículo (evitando a sobreposição da medição ou da computação do mesmo valor medido, variável controlada, etc). No entanto, neste caso, sob uma condição onde um dispositivo de controle de frenagem não está operando devido a qualquer certa razão, as informações sobre o grau de um deslizamento de uma roda não poderiam ser inseridas em um dispositivo de controle de amortecimento de vibração de modo que o controle de amortecimento e vibração com base em um valor estimado de torque de roda pode não ser executado apropriadamente. Como já descrito, quando uma roda está em um estado de deslizamento, um valor estimado de torque de roda estimado com base em uma velocidade de roda torna-se mais excessivo do que um torque realmente gerado na roda. Assim, se o controle de torque motriz for executado com base em tal valor estimado de torque de roda sob a condição onde um estado de deslizamento não pode ser julgado enquanto a roda está em um estado de deslizamento, não somente o efeito de amortecimento de vibração pode diminuir mas também a vibração longitudinal do veículo pode surgir devido à variação excessiva de um torque motriz. Tal condição é contrária ao propósito, esperado no controle de amortecimento de vibração, de aperfeiçoar a estabilidade operacional e o grau de conforto de deslocamento de um veículo.
[00017] Assim, em outro aspecto da presente invenção, um dispositivo de controle de amortecimento de vibração de um tipo de executar um controle de amortecimento de vibração no qual uma vibração de oscilação ou saltos de uma carroceria de veículo é suprimida através de um controle de saída de tração de um veículo compreende uma porção de aquisição de valor estimado de torque de roda a qual adquire um valor estimado de um torque de roda gerado em um local de contato de solo de uma roda do veículo por sobre uma superfície de estrada e atuando sobre a roda; uma porção de controle de torque motriz a qual controla um torque motriz do veículo para suprimir as amplitudes de oscilação da vibração ou saltos com base no valor estimado de torque de roda; e ainda, uma porção de aquisição de quantidade de estado de deslizamento a qual adquire uma quantidade de estado de deslizamento de roda a qual indica uma condição de deslizamento de uma roda de um dispositivo de controle de frenagem do veículo para reduzir um deslizamento da roda, em que uma variável controlada do torque motriz pode ser corrigida com base no grau do deslizamento indicado pela quantidade de estado de deslizamento de roda e, a variável controlada do torque motriz pode ser reduzida quando o dispositivo de controle de frenagem não puder ser operado como comparado com quando o dispositivo de controle de frenagem pode operar.
[00018] De acordo com a estrutura acima mencionada, em um dispositivo de controle de amortecimento de vibração o qual adquire uma quantidade de estado de deslizamento de roda que indica uma condição de deslizamento de uma roda de um dispositivo de controle de frenagem de um veículo, quando o dispositivo de controle de frenagem não puder operar ou quando a sua operação for proibida, a saber, quando a condição de deslizamento não puder ser monitorada, a variável controlada do torque de tração é diminuída se comparado com quando o dispositivo de controle de frenagem pode operar, e por meio disto a ocorrência da desfavorabilidade devido à operação do dispositivo de controle de amortecimento de vibração quando uma roda cai em um estado deslizamento será evitada.
[00019] Mais ainda, no aspecto acima mencionado adicional, especialmente, em um caso que uma variável controlada de um torque motriz provido pela porção de controle de torque motriz é determinada com base no valor estimado de torque de roda e uma quantidade de acionamento solicitada de um motorista do veículo (por exemplo, com base na depressão de um pedal de acelerador), se o dispositivo de controle de frenagem não puder operar, a variável controlada do torque motriz com base no valor estimado de torque de roda pode ser reduzida para substancialmente 0. Por meio disto, em um caso em que uma condição de uma roda não puder ser detectada e um valor estimado de torque de roda não puder ser computado com uma precisão suficiente, o controle de amortecimento de vibração contra distúrbio é substancialmente parado e qualquer ocorrência de desfavorabilidade devido a uma operação do dispositivo de controle de amortecimento de vibração será suprimida. Por outro lado, como para o controle de amortecimento de vibração com base na quantidade de acionamento requerida do motorista do veículo (que corresponde ao "controle de alimentação" na modalidade seguinte), como a sua variável controlada não é dependente da precisão de um valor estimado de torque de roda, o controle pode ser executado. Quando um pneu ou uma roda está em um estado de deslizamento, no entanto, nenhum bom controle de torque motriz para a roda pode ser executado de modo que a redução da variável controlada ou aparada da execução de controle pode ser feita.
[00020] Na estrutura acima mencionada, um dispositivo de controle de frenagem pode ser pelo menos um escolhido do grupo que inclui o controle de ABS, VSC e TRC, seletivamente feito em uma condição operável por um motorista de um veículo. Quando, de acordo com uma seleção do motorista, o dispositivo de controle de frenagem não é tornado operável, uma variável controlada de um torque motriz pode ser reduzida se comparada com quando o dispositivo de controle de frenagem é operável. Mais ainda, em um caso em que um veículo está equipado com um assim denominado VDIM, isto é, um dispositivo, que inclui um controle de ABS, VSC e TRC, um controle de direção, o qual controla integralmente o comportamento de estabilidade do veículo, o dispositivo de controle de frenagem pode ser uma parte do VDIM, e, uma variável controlada de um torque motriz pode ser reduzida quando o VDIM não é operável de acordo com a opção do motorista. Nestes casos, na redução da variável controlada do torque motriz, o controle de amortecimento de vibração com base em um valor estimado de torque de roda pode ser substancialmente parado.
[00021] Mais ainda, também no aspecto acima descrito, quando um dispositivo de controle de frenagem não é operável devido à ocorrência de uma irregularidade em um dispositivo de frenagem, a condição de uma roda torna-se indetectável de modo que uma variável controlada de um torque motriz pode ser reduzida se comparado com onde o dispositivo de controle de frenagem é operável. Neste caso, também, na redução da variável controlada do torque motriz, o controle de amortecimento de vibração com base em um valor estimado de torque de roda pode ser substancialmente parado.
[00022] Geralmente, de acordo com a presente invenção, mesmo quando nenhuma boa estimativa de um torque de roda puder ser executada, um valor estimado próximo de um valor de torque de roda real pode ser adquirido de modo que é esperado que um controle de amortecimento de vibração de um veículo será executado melhor do que nunca. Ainda, deve ser compreendido como uma vantagem da presente invenção que, no passado, para a aquisição de um valor de torque de roda mesmo quando uma roda está em um estado de deslizamento ou gira para trás, seria requerido prover qualquer dispositivo, tal como um sensor de torque, em uma roda, mas de acordo com a presente invenção, sem tal sensor, o valor de um torque de roda a ser utilizado no controle do funcionamento, do movimento, da força motriz de frenagem ou no amortecimento de vibração para um veículo torna-se disponível. Como não há necessidade de preparar um dispositivo de sensor de torque especialmente para a aquisição de um valor de torque de roda, o custo de um veículo ou um dispositivo de controle e/ou uma mão-de-obra requerida para o seu projeto será reduzido.
[00023] Mais ainda, como para um dos aspectos acima mencionados da presente invenção, em um caso em que o dispositivo de controle de amortecimento de vibração da invenção é adaptado para utilizar a quantidade de estado de deslizamento de roda computada pelo dispositivo de controle de frenagem, quando o dispositivo de controle de frenagem não é operável, uma variável controlada de um torque motriz é reduzida se comparado com quando o dispositivo de controle de frenagem é operável. De acordo com esta estrutura, a ocorrência de desfavorabilidade que resulta da operação do dispositivo de controle de amortecimento de vibração sob condições onde o dispositivo de controle de frenagem não é operável será evitada. Especificamente, nos veículos em anos recentes, um controle de funcionamento integrativo, tal como o VDIM, torna-se disponível para a execução de múltiplos controles, e portanto a simplificação estrutural e o aperfeiçoamento de eficiência são requeridos para a redução do custo e da mão de obra de fabricação para um veículo e a sobrecarga durante a utilização de um veículo. Pode ser dito que, em um caso que tais estruturas de controle plurais são instaladas em um veículo, a estrutura da invenção impede as ocorrências de operações inesperadas, impróprias de um dispositivo de controle de amortecimento de vibração.
[00024] Os outros objetos e vantagens da presente invenção ficarão aparentes na explicação das modalidades preferíveis seguintes da presente invenção.
[00025] Figura 1 (A) mostra um diagrama esquemático de um automóvel no qual uma modalidade preferível de um dispositivo de controle de amortecimento de vibração de acordo cm a presente invenção é executada. Figura 1 (B) é um diagrama esquemático mais detalhado da estrutura interna do dispositivo de controle eletrônico da Figura 1 (A).
[00026] Figura 2 (A) é um desenho que explica as variáveis de estado de vibração de carroceria de veículo a ser suprimida no dispositivo de controle de amortecimento de vibração em uma modalidade preferida da presente invenção. Figura 2 (B) é um desenho que mostra uma estrutura de um controle de amortecimento de vibração em uma modalidade preferível da presente invenção na forma de um diagrama em blocos de controle.
[00027] Figura 3 são desenhos que explicam os modelos de movimento dinâmico de vibração de carroceria de veículo assumidos em um dispositivo de controle de amortecimento de vibração de uma modalidade preferível da invenção. Figura 3 (A) mostra um modelo de vibração de massa suspensa, e Figura 3 (B) mostra um modelo de vibração de massa suspensa e de massa não-suspensa.
[00028] Figura 4 mostra um mapa na forma de um gráfico de um coeficiente de correção Kslip para um valor estimado de torque de roda o qual varia dependendo de uma quantidade de estado de deslizamento de roda.
[00029] Figura 5 é um desenho que mostra uma estrutura de um estimador de torque de roda na forma de um diagrama em blocos de controle. As estruturas de C6a-C6e podem ser construídas à parte de um dispositivo de controle motriz ou um dispositivo de controle de frenagem.
[00030] A presente invenção é explicada em detalhes com relação a diversas modalidades preferíveis, referido aos desenhos acompanhantes a seguir. No desenho, o mesmo número de referência indica a mesma porção.
[00031] A Figura 1 (A) mostra esquematicamente um veículo, tal como um automóvel, no qual uma modalidade preferível de um dispositivo de controle de amortecimento de vibração da invenção está instalado. Neste desenho, no veículo 10 que tem rodas dianteiras esquerda e direita 12FL e 12FR e rodas traseiras esquerda e direita 12RL e 12RR, está instalado um dispositivo motriz 20 o qual gera uma força motriz um torque motriz nas rodas traseiras de acordo com a depressão de um pedal de acelerador 14 por um motorista em um modo usual. No exemplo mostrado, o dispositivo motriz 20 é construído de modo que um torque motriz ou uma força motriz rotacional é transmitido de um motor 22 através de um conversor de torque 24, uma transmissão automática 26, uma engrenagem de diferencial 28, etc, para as rodas traseiras 12RL e 12RR. No entanto, ao invés do motor 22, o dispositivo motriz pode ser um tipo elétrico que utiliza um motor elétrico ou um tipo híbrido que tem tanto um motor de combustão quanto um motor elétrico. Ainda, o veículo pode ser um veículo de tração nas quatro rodas ou um veículo de tração nas rodas dianteiras. Neste aspecto, apesar de não-ilustrado para simplicidade, o veículo está provido com um dispositivo de frenagem que gera uma força de frenagem sobre cada roda e um dispositivo de direção para controlar um ângulo de direção das rodas dianteiras ou das rodas dianteiras e traseiras como em um veículo normal.
[00032] A operação do dispositivo motriz 20 é controlada por um dispositivo de controle eletrônico 50. O dispositivo de controle eletrônico 50 pode incluir um tipo normal de um microcomputador e circuitos de acionamento que tem uma CPU, uma ROM, uma RAM, e dispositivos de porta de entrada/saída mutuamente conectados com um barramento comum bidirecional. No dispositivo de controle eletrônico 50, são inseridos os sinais que indicam as velocidades de roda Vwi (i= FL, FR, RL, RR) de sensores de velocidade de roda 30i (i= FL, FR, RL, RR) instalados nas respectivas rodas; os sinais de sensores providos em várias partes no veículo, tais como uma velocidade rotacional de motor ne, uma velocidade rotacional de transmissão no, uma quantidade de depressão do pedal de acelerador 0a, etc. Neste aspecto, deve ser compreendido que, além dos acima, vários sinais detectados podem ser inseridos para obter vários parâmetros requeridos para os vários controles a serem executados no veículo desta modalidade. O dispositivo de controle eletrônico 50 pode ser construído para compreender um dispositivo de controle motriz 50a o qual controla a operação do dispositivo motriz 20, e um dispositivo de controle de frenagem 50b o qual controla a operação do dispositivo de frenagem (não-mostrado) como mostrado esquematicamente em mais detalhes na Figura 1 (B).
[00033] Os dispositivos de controle de frenagem 50b podem ser um dispositivo que executa um controle de frenagem bem conhecido para uma pessoa versada na técnica, tal como um controle de ABS, VSC e TRC, a saber, o qual inibe que a força de atrito entre uma roda e uma superfície de estrada (uma soma vetorial da força longitudinal e da força lateral sobre a roda) torne-se excessiva além de um limite, e/ou controla uma força longitudinal ou uma razão de deslizamento sobre uma roda de modo a evitar uma deterioração comportamental do veículo que resulta da força de atrito da roda excedendo o seu limite. Ou o dispositivo de controle de frenagem pode ser uma parte de um VDIM que inclui um controle de direção, etc, assim como os controles de razão de deslizamento de roda de controle de ABS, VSC e TRC, para estabilizar um comportamento de veículo. Em tal dispositivo de controle de frenagem, como mostrado no desenho, os sinais elétricos de uma forma de pulso gerados sequencialmente a cada rotação de uma quantidade predeterminada nas respectivas rodas são inseridos dos sensores de velocidade de roda das respectivas rodas 30FR, FL, RR e RL; a velocidade rotacional de cada roda é computada medindo o intervalo de tempo entre as chegadas dos sinais de pulso sequencialmente inseridos; e um valor de velocidade de roda r- o é computado multiplicando a velocidade rotacional da roda e o raio de roda correspondente. Mais ainda, como posteriormente descrito em detalhes, para o cálculo de um valor estimado de torque de roda, no dispositivo de controle de frenagem 50b, pode ser executado um julgamento se um pneu de uma roda está em um estado de deslizamento ou não e uma computação de uma "quantidade de estado de deslizamento de roda", um valor de índice que indica o grau de um deslizamento quando a roda está em um estado de deslizamento. O valor de velocidade de roda r- co e uma quantidade de estado de deslizamento de roda são transmitidos para o dispositivo de controle motriz 50a para computar um valor estimado de torque de roda. Neste aspecto, o cálculo de uma velocidade rotacional de roda para uma velocidade de roda pode ser executado no dispositivo de controle motriz 50a. Neste caso, a velocidade rotacional da roda é dada do dispositivo de controle de frenagem 50b para o dispositivo de controle motriz 50a.
[00034] O controle de frenagem, tal como um controle de ABS, VSC, TRC, ou um controle por VDIM como acima descrito são seletivamente tornados operáveis por uma chave LIGA-DESLIGA 52 (a qual pode ser preparada para cada controle executável apesar de somente uma ser preparada para a simplicidade no desenho), provida em uma posição acessível por um motorista do veículo (por exemplo, uma posição arbitrária sobre o painel frontal de um assento do motorista). Consequentemente, de acordo com a intenção do motorista, estes controles de frenagem são tornados operáveis somente quando a chave 52 está LIGADA, e inoperáveis quando a chave 52 está DESLIGADA. Ainda, apesar de não-mostrado, em um caso em que a operação do dispositivo de frenagem é irregular ou em um caso em que um sensor de velocidade de roda é irregular, é detectado em um modo conhecido daqueles versados na técnica que o controle de frenagem torna-se impossível, e neste caso, a operação do dispositivo de controle de frenagem acima mencionado é tornada proibida. Então, quando a operação do dispositivo de controle de frenagem tornou-se proibida, a computação de uma quantidade de estado de deslizamento de roda também não é mais executada. Assim, neste caso, como abaixo descrito, o controle de amortecimento de vibração sobre um valor estimado de torque de roda pelo dispositivo de controle de amortecimento de vibração pode ser parado.Para este propósito, do dispositivo de controle de frenagem 50b para o dispositivo de controle motriz 50a, os sinais que indicam se vários controles, tais como o VSC, o ABS, ou o TRC, para controlar uma razão de deslizamento de uma roda são cada um operáveis ou não podem ser transmitidos assim como um valor de velocidade de roda e uma quantidade de estado de deslizamento de roda.
[00035] Mais ainda, como explicado a seguir, o dispositivo da invenção pode ser adaptado de modo que a execução da correção de um valor estimado de torque de roda com base em um grau de uma condição de deslizamento de uma roda pode ser permitida somente quando o controle de VSC, de ABS, ou de TRC é realmente executado. Neste caso, do dispositivo de controle de frenagem 50b para o dispositivo de controle motriz 50a, as informações que indicam a presença ou a ausência de execução dos respectivos controles tais como o VSC, o ABS, ou o TRC, para controlar uma razão de deslizamento de uma roda, são transmitidas assim como as séries de sinais acima mencionadas. Mais ainda, se qualquer irregularidade estiver nos sensores de velocidade de roda de modo que nenhum valor de velocidade de roda possa ser adquirido, é necessário mudar o modo de estimativa de um valor estimado de torque de roda, e portanto, as informações de status de velocidade de roda ineficientes as quais indicam que um valor de velocidade de roda não é adquirível podem ser fornecidas do dispositivo de controle de frenagem 50b para o dispositivo de controle motriz 50a.
[00036] No dispositivo de controle motriz 50a, um torque de saída alvo (torque motriz solicitado) para o dispositivo motriz solicitado por um motorista é determinado com base na quantidade de depressão do pedal de acelerador 9a. No entanto, no dispositivo de controle motriz da invenção, o torque motriz solicitado é corrigido de modo a executar o controle para suprimir (amortecer) a vibração de oscilação/saltos da carroceria de veículo através de um controle de torque motriz, e uma demanda de controle que corresponde ao torque solicitado assim corrigido é fornecido para o dispositivo motriz 20. Neste controle de amortecimento de vibração de oscilação/saltos, são executado (1) uma computação de um valor estimado de um torque de roda da(s) roda(s) de fracionamento causado por uma força que atua contra uma superfície de estrada sobre a roda motriz; (2) um cálculo de quantidades de estado de vibração de oscilação/saltos através de um modelo de movimento de uma vibração de carroceria de veículo; e (3) uma computação da quantidade de correção para o torque de roda para suprimir as quantidades de estado vibracional de oscilação/saltos e a correção do torque solicitado baseado nas mesmas. O valor estimado de torque de roda em (1) pode ser computado com base em um valor de velocidade de roda da roda motriz (ou uma velocidade rotacional de roda da roda motriz) recebido do dispositivo de controle de frenagem 50b, ou da velocidade rotacional de motor ne. Neste aspecto, deve ser compreendido que o dispositivo de controle de amortecimento de vibração da invenção é realizado nas operações de processamento de (1 )-(3), e o dispositivo de estimativa de torque de roda da invenção é realizado na operação de processamento de (1).
[00037] Em um veículo, quando um dispositivo motriz opera com base em uma demanda de fracionamento do motorista e uma variação de um torque de roda surge, em uma carroceria de veículo 10 como ilustrado na Figura 2 (A), pode surgir a vibração de saltos na direção perpendicular (a direção z) da centróide Cg da carroceria de veículo e a vibração de oscilação na direção de oscilação (a direção 6) ao redor da centróide da carroceria de veículo. Mais ainda, quando uma força externa ou torque (um distúrbio) atua sobre uma roda de uma superfície de estrada durante o funcionamento do veículo, o distúrbio pode ser transmitido para o veículo e as vibrações da direção de saltos e da direção de oscilação podem também surgir na carroceria de veículo. Então, na modalidade ilustrada, é construído um modelo de movimento da vibração de oscilação e saltos de uma carroceria de veículo, onde os deslocamentos z e 0 e a sua taxa de mudança dz/dt e d0/dt na carroceria de veículo, isto é, as variáveis de estado da vibração de carroceria de veículo em um momento quando um valor de um torque de roda convertido de um torque motriz solicitado e o valor estimado do torque de roda presente são inseridos no modelo, são computados; e então, o torque motriz do dispositivo motriz é ajustado (o torque motriz solicitado é corrigido) de modo que as variáveis de estado obtidas do modelo serão convergidas para 0, a saber, a vibração de oscilação/saltos será suprimida.
[00038] A Figura 2 (B) mostra esquematicamente uma estrutura de um controle de torque motriz em uma modalidade da presente invenção na forma de um diagrama em blocos de controle (Neste aspecto, a operação de cada bloco de controle (exceto CO e C3) é executada por qualquer um do dispositivo de controle motriz 50a e do dispositivo de controle de frenagem 50b no dispositivo de controle eletrônico 50). Com referência à Figura 2 (b), geralmente, no controle de torque motriz da modalidade da presente invenção, são preparados um controlador de tração o qual fornece uma demanda de tração do motorista para o veículo, e um controlador de amortecimento de vibração para corrigir a demanda de tração do motorista de modo que a vibração de oscilação/saltos da carroceria de veículo possa ser suprimida. No controlador de tração, após a demanda de tração do motorista, isto é, a quantidade de depressão do pedal de acelerador (CO) é convertida para um torque motriz solicitado em um modo usual (C1), o torque motriz solicitado é convertido em uma demanda de controle para o dispositivo motriz (C2), a qual é então transmitida para o dispositivo motriz (C3). [A demanda de controle será uma abertura de válvula borboleta-alvo para um motor a gasolina; uma quantidade de injeção de combustível-alvo para um motor a diesel; e uma quantidade de corrente elétrica-alvo para um motor elétrico, etc].
[00039] Por outro lado, o controlador de amortecimento de vibração consiste em uma porção de controle de alimentação e uma porção de controle de retorno. A porção de controle de alimentação tem uma estrutura de, o que é chamado, um regulador ótimo, onde, como abaixo explicado, um valor de torque de roda o qual é convertido do torque motriz solicitado em C1 (um torque de roda solicitado do motorista TwO) é inserido na porção de modelo de movimento (C4) da vibração de oscilação e saltos da carroceria de veículo; e, cuja porção de modelo de movimento (C4), as respostas para o torque inserido nas variáveis de estado da carroceria de veículo são computadas; e uma quantidade de correção do torque de roda motriz solicitado para convergir as variáveis de estado para os seus mínimos é computada (C5). Ainda, na porção de controle de retorno, um valor estimado de torque de roda Tw é computado em um estimador de torque de roda (C6) como posteriormente explicado, e o valor estimado de torque de roda, após multiplicado por um ganho de controle de retorno FB (um ganho para ajustar o balanço de contribuições entre o torque de roda solicitado do motorista TwO e o valor estimado de torque de roda Tw no modelo de movimento - C7), é inserido na porção de modelo de movimento (C4) como uma entrada de distúrbio, enquanto sendo adicionado ao torque de roda solicitado, e por meio disto, o componente de correção para o torque de roda solicitado contra um distúrbio é também computado. A quantidade de correção para o torque de roda solicitado em C5 é convertida na unidade do torque solicitado para o dispositivo motriz e transmitida para um somador (C1a), e assim, o torque motriz solicitado, após ser assim corrigido de modo que nenhuma vibração de oscilação e saltos surgirá, é mudado para uma demanda de controle (C2), e fornecido para um dispositivo motriz (C3).
[00040] Como já notado, no controle de amortecimento de vibração na modalidade da presente invenção, primeiro, um modelo de movimento dinâmico de uma carroceria de veículo nas suas direções de salto e de oscilação é assumido, onde uma equação de estado das variáveis de estado na direção de salto e na direção de oscilação é construída de modo que um torque de roda solicitado de um motorista TwO e um valor estimado de torque de roda Tw (distúrbio) são tornados entradas. Então, desta equação de estado, uma entrada (valor de torque) a qual farão as variáveis de estado na direção de salto e na direção de oscilação convergirem para 0 é determinado utilizando a teoria do regulador ótimo, e, com base no valor de torque resultante, o torque motriz solicitado é corrigido.
[00041] Para o modelo de movimento dinâmico da direção de salto e da direção de oscilação de uma carroceria de veículo, por exemplo, como mostrado na Figura 3 (A), a carroceria de veículo é considerada como um corpo rígido S que tem uma massa M e um momento de inércia I, e suponha que este corpo rígido S seja suportado por suspensões de roda dianteira de um módulo de elasticidade kf e um fator de amortecimento cf e suspensões de roda traseira de um módulo de elasticidade kr e um fator de amortecimento cr (modelo de vibração de massa suspensa de uma carroceria de veículo). Neste caso, as equações de movimento na direção de salto e na direção de oscilação do centróide da carroceria de veículo podem ser expressas como mostrado nas seguintes (1a) e (1b).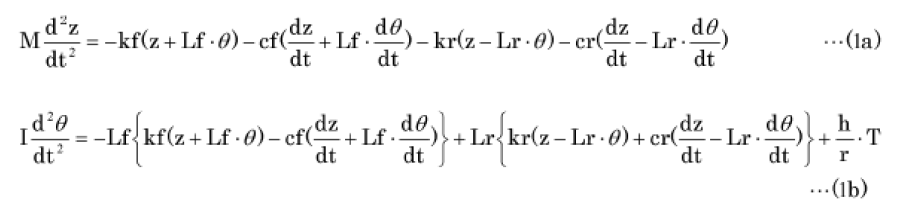
[00042] onde Lf e Lr são as distâncias do centróide até o eixo geométrico de roda dianteira e o eixo geométrico de roda traseira, respectivamente; r é um raio de roda; e h é a altura do centróide de uma superfície de estrada. Neste aspecto, na expressão (1a) os 12 e 22 termos são os componentes de força do eixo geométrico de roda dianteira, e os 32 e 42 termos são aqueles do eixo geométrico de roda traseira, e na expressão (1b), o 12 termo é um componente de um momento de força do eixo geométrico de roda dianteira, e o 2- termo é aquele do eixo geométrico de roda traseira. O 32 termo na expressão (1b) é o componente de um momento de força exercido ao redor do centróide da carroceria de veículo por um torque de roda T(=TwO+Tw) gerado na roda motriz.
[00043] As equações (1a) e (1b) acima mencionadas podem ser reescritas na forma de uma equação de estado (de um sistema linear) enquanto que os seus deslocamentos z e 9 e a sua razão de mudança dz/dt e d0/dt na carroceria de veículo são considerados como componentes de um vetor de variável de estado X (t), como na equação (2a) seguinte dX(t)/dt=A X(t)+B- u (t) ... (2a),
[00044] onde X (t), A e B são cada,
[00045] Os respectivos componentes a1 -a4 e b1 -b4 na matriz A são dados reunindo-se os coeficientes z, 0, dz/dt e d0/dt nas expressões (1a), (1b):
[00046] Mais ainda, u (t) é: u(t)=T
[00047] o qual é a entrada do sistema expressa com a equação de estado (2a). Consequentemente, da expressão (1b), o componente p1 da matriz B é: p1=h/(l ■ r).
[00048] Na equação de estado (2a), se u(t) =-K X (t) ...(2b),
[00049] for colocar, a Equação de estado (2a) se tornará dX(t)/dt= (A-BK) • X (t) ... (2c).
[00050] Assim, quando a equação diferencial (2c) do vetor de variável de estado X (t) for resolvida enquanto urn valor inicial X0 (t) de X (t) for ajustado para X0(t)=(0,0,0,0) (é assumido que nenhuma vibração existe antes de uma entrada de um torque), o valor de torque u(t) o qual suprime a vibração de oscilação e saltos será determinado pela determinação do ganho K o qual faz a magnitude de X (t), isto é, os deslocamentos e suas taxas de mudança no tempo nas direções de salto e de oscilação, convergir para 0.
[00051] O ganho K pode ser determinado utilizando o que é denominada a teoria de Regulador Ótimo. De acordo com esta teoria, é conhecido que, quando o valor da função de avaliação de uma forma secundária: J=1/2 J(XTQX+uTRu) dt ... (3a) (onde a faixa de integração é de 0 a oo.)
[00052] torna-se o mínimo, X (t) na equação de estado (2a) é estavelmente convergido, e a matriz K a qual torna a função de avaliação J para seu mínimo pode ser dada por: K=R'1 • BT • P,
[00053] onde P é uma solução da equação de Riccati: -dP/dt= ATP+PA+Q-PBR'1BTP.
[00054] A equação de Riccati pode ser resolvida por um processo arbitrário conhecido no campo de sistemas lineares, e por meio disto o ganho K será determinado.
[00055] O Q e o R na função de avaliação J e na equação de Riccati são uma matriz simétrica definida semipositiva ou uma matriz simétrica positiva a qual pode ser determinada arbitrária e respectivamente, e estas são matrizes ponderadas na função de avaliação J a serem determinadas por um projetista do sistema. Por exemplo, no caso do modelo de movimento aqui considerado, Q e R podem ser determinadas como
[00056] e, na expressão (3a), se uma norma (magnitude) de um específico entre os componentes de um vetor de estado, por exemplo, dz/dt, dO/dt, for determinado maior do que uma norma dos outros componentes, por exemplo z, 0, o componente cuja norma for determinado maior convergirá mais estavelmente. Mais ainda, determinando um valor maior para o componente de Q, a propriedade transiente no sistema será importantemente considerada, a saber, os valores do vetor de estado serão feitos convergir mais prontamente para valores estáveis, e determinando um maior valor para R, o consumo de energia no sistema será reduzido.
[00057] Em uma operação real do dispositivo de controle de amortecimento de vibração, como mostrado no diagrama em blocos da Figura 2 (B), o vetor de variável de estado X (t) é computado resolvendo a equação diferencial da equação (2a) utilizando um valor de entrada de torque no modelo de movimento C4. Então o valor U (t) é obtido em C5 multiplicando o vetor de estado X (t), isto é, a entrada do modelo de movimento C4, e o ganho K determinado para convergir o vetor de variável de estado X (t) para 0 ou o seu mínimo como acima, e no somador (C1a), o valor U (t), após convertido na unidade de um torque para o dispositivo motriz, é subtraído do torque motriz solicitado (o valor U (t) pode ser alimentado de volta também para o valor de entrada de torque do modelo de movimento C4 para a operação do modelo de movimento C4 (retorno de estado)). O sistema expresso pelas expressões (a1) e (1b) é um sistema de ressonância, e assim, para uma entrada arbitrária, os valores do vetor de variável de estado são feitos substancialmente dos componentes de frequência de uma banda que tem uma certa característica espectral na qual a frequência ressonante do sistema está centrada. Consequentemente, pela estrutura na qual U (t) (o seu valor convertido) é subtraído do torque motriz solicitado, os componentes da frequência ressonante de sistema, a saber, os componentes os quais causam a vibração de oscilação - saltos na carroceria de veículo, no torque motriz solicitado, são corrigidos de modo que a vibração de oscilação - saltos na carroceria de veículo será suprimida. E quando uma variação que causa uma vibração de oscilação - saltos surge em Tw (distúrbio) transmitido de um estimador de torque de roda, a demanda de torque solicitada a ser inserida no dispositivo motriz é corrigida com -U (t) de modo que a vibração devido a Tw (distúrbio) será convergida.
[00058] A frequência de ressonância vibracional nas direções de oscilação e de saltos de um veículo, tal como um carro normal, é de aproximadamente 1-2 Hz, e, para o nível da velocidade vibracional nesta banda de frequência, de acordo com a velocidade de uma resposta de controle em um torque de roda para uma demanda em um veículo presente, é possível detectar um distúrbio de torque em uma roda e fazer a quantidade de compensação (quantidade de correção) U refletida no torque motriz de uma roda contra o distúrbio. Assim, um torque de distúrbio gerado sobre uma roda e capaz de causar uma vibração de oscilação - saltos e a vibração de oscilação - saltos induzida do mesmo serão canceladas por uma variação no torque motriz emitido do dispositivo motriz através da correção do torque motriz solicitado pelo controle de amortecimento de vibração.
[00059] Neste aspecto, como um modelo de movimento dinâmico de uma carroceria de veículo nas direções de salto e de oscilação, por exemplo, como mostrado na Figura 3 (B), um modelo no qual as elasticidades de mola de pneu de rodas dianteiras e traseiras são levados em conta assim como a estrutura na Figura 3 (A) pode ser empregado (o modelo de vibração de massa suspensa e de massa não-suspensa de uma carroceria de veículo). Onde os pneus de rodas dianteiras e traseiras tem módulos elásticos ktf e ktr, respectivamente, como visto da Figura 3 (B), a equação de movimento na direção de salto e a equação de movimento na direção de oscilação para o centróide de uma carroceria de veículo são expressas pelas seguintes expressões (4):
[00060] onde xf e xr cada um são as quantidades de deslocamentos de massas não-suspensas das rodas dianteiras e traseiras, e mf e mr cada um são as massas não-suspensas das rodas dianteiras e traseiras. Como no caso da Figura 3A, as expressões (4a)-(4b) constituem as equações de estado, onde z, 0, xf, xr, e seus valores diferenciais de tempo são utilizados em um vetor variável de estado, como na expressão (2a) (no entanto, a Matriz A torna-se de oito linhas e de oito sequências, e a Matriz B torna-se de oito linhas e uma sequência), e de acordo com a teoria do regulador ótimo, a matriz de ganho K a qual torna a magnitude do vetor de variável de estado convergida para 0 pode ser determinada. O controle de amortecimento de vibração real é executado similarmente ao caso da Figura 3 (A).
[00061] Na porção de controle de retorno do controlador de amortecimento de vibração da Figura 2 (B), apesar de que seria ideal realmente detectar o torque de roda a ser inserido na porção de controle de alimentação como um distúrbio com o sensor de torque instalado em cada roda, é difícil prover um sensor de torque em cada roda de um veículo usual como já descrito, e portanto, é empregado um valor estimado de torque de roda Tw o qual é estimado com o estimador de torque de roda C6 de qualquer outro valor o qual pode ser detectado em um veículo em funcionamento. A Figura 5 mostra a estrutura e a operação do estimador de torque C6 em uma forma de blocos de controle.
[00062] Tipicamente, o valor estimado de torque de roda Tw pode ser estimado com o diferencial de tempo de uma velocidade rotacional de roda co ou um valor de velocidade de roda r- co obtido de um sensor de velocidade da roda de uma roda motriz como: Tw=M • r2 • dco/dt ... (5) (Figura 5, C6a), onde M é a massa do veículo e r é um raio de roda. [Supondo que o total das forças de tracionamento geradas pelas respectivas rodas de tracionamento sobre os locais de contato de solo sobre uma superfície de estrada seja igual a toda a força motriz do veículo M • G (onde G é uma aceleração), um torque de roda Tw é dado por: Tw=M G r ... (5a).
[00063] Como a aceleração G do veículo é dada do valor diferencial da velocidade de roda r- co como: G= r- dco/dt ... (5b),
[00064] o torque de roda será estimado como na expressão (5)].
[00065] Na estimativa de um torque de roda como acima descrito, quando o pneu de uma roda motriz adere a uma superfície de estrada para gerar uma força motriz durante o funcionamento do veículo, é esperado que a expressão (5) será geralmente consistente com um torque de roda realmente gerado. No entanto, quando a força de reação de superfície de roda sobre a roda motriz aumenta e excede o círculo de atrito máximo, o pneu cairá em um estado de deslizamento (onde o pneu começa a deslizar), e então, a expressão (5b) se tornará inválida, e a precisão do valor estimado da expressão (5) ficará pior. Mais ainda, de um sinal de um sensor de velocidade de roda usualmente instalado em uma roda exceto algum dos sensores altamente funcionalizados, a magnitude de uma velocidade rotacional de uma roda é detectável, mas, as informações sobre se a roda está rolando para frente ou para trás são inadquiríveis. Assim, considerando que o controlador de amortecimento de vibração é usualmente construído sob a suposição de que o veículo move-se para frente, a inserção do valor estimado acima mencionado no controlador de amortecimento de vibração como este é durante o deslocamento inverso dos veículos causaria a inserção no controlador de amortecimento de vibração do torque de roda na direção oposta à direção real. Ainda, também quando uma velocidade de roda não puder ser detectada corretamente, por exemplo quando um sensor de velocidade de roda quebra, a precisão no valor estimado de torque de roda da expressão (5) também pioraria. Então, na presente invenção, em uma condição onde é assumido como acima descrito que a precisão da estimativa de um valor estimado de torque de roda pelo estimador de torque de roda (C6) pioraria, a correção de um valor estimado de torque de roda é feita como descrito a seguir.
[00066] Quando o pneu de uma roda motriz cai em um estado de deslizamento, um valor de aceleração G, computado pelo diferencial de tempo de uma velocidade de roda pela expressão (5b), tornaria-se maior do que uma aceleração real, e portanto, é assumido que um valor estimado de torque de roda estimado da velocidade de roda se tornaria maior do que um valor real. Assim, quando o pneu de uma roda motriz cai em um estado de deslizamento, um valor estimado de torque de roda é corrigido para baixo com base em um valor de índice arbitrário, que indica uma condição de deslizamento do pneu (quantidade de estado de deslizamento de roda) (C6b). Neste caso, por exemplo, o valor estimado de torque de roda da expressão (5) pode ser corrigido para: Tw=KSlip M r2 - dco/dt ... (6) Kslip é uma quantidade dada como uma função de uma quantidade de estado de deslizamento de roda, e é dada pela utilização do mapa como mostrado na Figura 4. Na Figura 4, é importante notar que, quando um pneu está em um estado de aderência, Kslip é ajustado para Kslip = 1, e se o pneu cai em um estado de deslizamento e completamente em uma condição de giro de roda (uma condição que nenhum torque de roda pode ser exercido sobre o veículo), este é ajustado para Kslip=0.
[00067] A quantidade de estado de deslizamento de roda, o valor de índice que mostra um grau de um deslizamento de um pneu de uma roda, por exemplo, pode ser a razão da média de velocidades de roda das rodas acionadas esquerda e direita para a média de velocidades de roda das rodas de tracionamento esquerda e direita. Neste caso, quando a roda motriz cai em um estado de deslizamento, uma velocidade da roda de uma roda motriz aumentará relativamente, e, como um resultado, a razão de uma velocidade de roda, isto é, uma quantidade de estado de deslizamento de roda, diminuirá. Também, uma razão de deslizamento ou uma razão de deslizamentos de pneus pode ser utilizada como a quantidade de estado de deslizamento de roda. Neste aspecto, quando a quantidade de estado de deslizamento de roda é definida como um valor o qual aumenta enquanto o grau de um deslizamento torna-se grande, o valor de Kslip é reduzido conforme a quantidade de estado de deslizamento de roda aumenta, e como mostrado no exemplo da Figura 4, quando a quantidade de estado de deslizamento de roda é definido como um valor o qual reduz enquanto o grau de um deslizamento torna-se grande, o valor de Kslip deve ser reduzido conforme a quantidade de estado de deslizamento de roda diminui, e deve ser compreendido que ambos estes casos pertencem ao escopo da presente invenção.
[00068] A correção de um valor estimado de torque de roda com Kslip como na expressão (6) pode ser executada através do monitoramento do valor de uma quantidade de estado de deslizamento de roda, mas também ser executado com base no valor de uma quantidade de estado de deslizamento de roda quando a seguinte condição (a)-(c) é estabelecida: Quando um controle de VSC, de TRC, ou de ABS é executado (quando estes controles são executados, usualmente, um pneu muda o seu estado de um estado de aderência para um estado de deslizamento); Quando a diferença entre a média das velocidades de roda das rodas acionadas e a média das velocidades de roda das rodas de tracionamento excede uma quantidade predeterminada por um período predeterminado; Quando o valor diferencial de tempo de uma velocidade de roda excede um limite predeterminado por um período predeterminado. Neste aspecto, o limite predeterminado pode ser ajustado para uma aceleração a qual um veículo não pode produzir.
[00069] A porção de computação de quantidade de estado de deslizamento (C6c) a qual executa a computação de uma quantidade de estado de deslizamento de roda, e a porção de correção de torque de roda (C6b) a qual executa a correção com Kslip são realizadas pelas operações da CPU e de outros componentes. Apesar de que, de preferência, a porção de computação de quantidade de estado de deslizamento C6c é provida no dispositivo de controle de frenagem 50b, esta não estar limitada a isto, e a porção C6c pode ser provida no dispositivo de controle motriz.
[00070] Como acima notado, a direção de uma roda é indetectável em um sensor de velocidade de roda normal, mas, o valor estimado, dado através da estimativa com a expressão (5) no estimador de torque de roda, é computado sob a suposição de que a roda está rolando para frente. Assim, apesar da roda estar girando em sentido contrário, o sinal do valor estimado será oposto àquele do valor real. Assim, o estimador de torque de roda da invenção detecta quando a roda está girando em sentido contrário de informações outras que de um sensor de velocidade de roda, e, se for detectado, o estimador de torque de roda corrige a expressão (5) para Tw=-M • r2 • dcn/dt ... (7),
[00071] e emite o valor estimado de torque de roda (C6d).
[00072] O rolamento para trás de uma roda pode ser detectado, por exemplo, de que, para um veículo automático, uma alavanca de mudança de marcha da transmissão está ajustada dentro de uma faixa R; e que, para um veículo manual, uma chave reversa é ajustada para LIGADA.
[00073] Neste aspecto, em um caso que um sensor de velocidade de roda instalado em uma roda é capaz de detectar a direção rotacional da roda, a expressão (5) pode ser utilizada enquanto que uma velocidade rotacional de roda <o é transformada em um valor negativo durante o rolamento para trás da roda.
[00074] Se qualquer irregularidade ocorrer em um sensor de velocidade de roda e a precisão de detecção de uma velocidade de roda torna-se pior, a precisão do valor estimado de torque de roda pela expressão (5) também fica pior, e portanto, em tal caso, a velocidade rotacional de roda ou a velocidade de roda da roda motriz pode ser computada da velocidade rotacional do dispositivo motriz (vide C6e na Figura 5). Quando a velocidade rotacional Ne do eixo de entrada do motor de combustão ou do motor elétrico do dispositivo motriz é utilizada, a velocidade rotacional de roda da roda motriz será dada por: <oe=Ne x uma razão de engrenagem de transmissão (engrenagem de mudança) x uma razão de engrenagem diferencial... (8)
[00075] Ainda, quando a velocidade rotacional No do eixo de saída da transmissão é utilizada, esta será dada por: CDO=NO X uma razão de engrenagem diferencial ... (9)
[00076] Então, o valor estimado da velocidade rotacional de roda w da roda motriz na expressão (8) ou (9) é substituído na expressão (5) (C6e -^C6a), e por meio disto, o valor estimado de torque de roda será computado.
[00077] A computação do valor estimado de torque de roda pelas expressões (8) ou (9) pode ser executada, por exemplo, quando qualquer uma das condições (f)-(i) seguintes for estabelecida: Quando uma irregularidade ocorre no sinal de um sensor de velocidade de roda e uma "condição irregular" é julgada; Quando uma irregularidade de um sensor de velocidade de roda é julgada em qualquer um dos outros dispositivos de controle, tais como a ABS, o VSC, e o TRC, ou os dispositivos de controle de frenagem 50b (Figura 1 (B)); Quando a diferença entre a velocidade de roda computada do sinal de um sensor de velocidade de roda e a velocidade de roda computada da velocidade rotacional do eixo de saída do dispositivo motriz pela expressão (8) exceder um valor predeterminado por um período predeterminado; e Quando a diferença entre a velocidade de roda computada do sinal de um sensor de velocidade de roda e a velocidade de roda computada da velocidade rotacional do eixo de saída da transmissão pela expressão (9) exceder um valor predeterminado por um período predeterminado.
[00078] Neste aspecto, na presente modalidade, qualquer irregularidade em um sensor de velocidade de roda é detectada em um modo bem conhecido para uma pessoa versada na técnica como acima descrito, e o sinal que indica isto será transmitido do dispositivo de controle de frenagem 50b para o dispositivo de controle motriz 50a.
[00079] Mais ainda, deve ser compreendido que o estimador de torque de roda (C6) pode ser adaptado de modo que todas as correções acima mencionadas do valor estimado de torque de roda podem tornar-se executáveis (vide Figura 5). Em tal caso, o valor estimado de torque de roda da expressão (5) será corrigido como segue: Tw=KSlip KSign M r2 - dcn/dt ... (10)
[00080] onde Kslip é usualmente Kslip=1, e, quando qualquer uma das condições (a)-(c) acima mencionadas for estabelecida, este é dado do mapa da Figura 4 (C6b, C6c). KSign é usualmente Ksign=1, e, quando a condição (d) ou (e) acima mencionada for estabelecida, este é mudado para Ksign=-1 (C6d). Mais ainda, o é usualmente uma velocidade rotacional de roda obtida do sinal de um sensor de velocidade de roda, e, quando qualquer condição (f)-(i) for estabelecida, esta é substituída por coe ou coo dada pela expressão (8) ou (9) (C6e). Consequentemente, por exemplo, quando as condições (a), (d), e (f) são estabelecidas, o valor estimado de torque de roda será Tw=-Kslip M r2 - dcoe/dt.
[00081] Com relação ao cálculo acima mencionado de um valor estimado de torque de roda, em um caso em que uma quantidade de estado de deslizamento de roda que indica um grau de um deslizamento de uma roda é computado pelo dispositivo de controle de frenagem tal como o controle de ABS, VSC, TRC, ou VDIM, quando estas operações são proibidas, a quantidade de estado de deslizamento de roda não pode ser computada. Neste caso, Kslip da expressão (6) também não será computado. Assim, quando os vários controles acima mencionados não podem operar, o ganho de retorno FB da Figura 2 (B) é reduzido ou ajustado para 0 de modo que o valor de entrada do valor estimado de torque de roda Tw do modelo de movimento C4 é reduzido ou interrompido. Concretamente, o ganho de controle de retorno FB é reduzido quando qualquer uma das condições (j)-(l) for estabelecida: Quando todas as chaves LIGA-DESLIGA para o controle de ABS, VSC, e TRC são DESLIGADAS; Quando a chave LIGA-DESLIGA para VDIM é DESLIGADA; e Quando a operação do controle de ABS, VSC, TRC ou VDIM é proibida devido a qualquer irregularidade no dispositivo de frenagem.
[00082] Neste aspecto, tipicamente, o ganho de controle de retorno FB é ajustado para FB=0 quando qualquer condição (j)-(l) for estabelecida, mas, a possibilidade de ocorrência do deslizamento é baixa quando uma velocidade de roda é baixa, e portanto, conforme a velocidade de roda aumenta, o ganho de retorno FB pode ser reduzido, por exemplo FB=V(o ...(11),
[00083] onde À é uma constante positiva a ser determinada experimentalmente ou teoricamente. Neste caso, se uma velocidade de roda tornar-se alta, o valor de FB será substancialmente ajustado para 0.
[00084] Por outro lado, na correção de uma variável controlada para o controle de amortecimento de vibração com base no torque motriz solicitado convertido da demanda motriz do motorista, a saber, na correção de uma variável controlada pelo controle de alimentação, o valor estimado de torque de roda não é utilizado (porque o modelo de movimento é um modelo linear), e portanto, a correção de uma variável controlada pelo controle de alimentação pode ser executada como está mesmo se qualquer uma das condições de (j)-(l) acima mencionadas for estabelecida. No entanto, sob uma condição onde não pode ser detectado se uma roda está ou não em um estado de deslizamento, se a roda caiu em um estado de deslizamento, o aumento do torque motriz faria a condição de deslizamento piorar. Assim, a amplitude de uma variável controlada para o controle de amortecimento de vibração pode ser reduzida, ou o próprio controle de amortecimento de vibração pode ser parado. Por exemplo, a amplitude de uma variável controlada pode ser reduzida conforme a magnitude de uma velocidade de roda aumenta, similarmente à expressão (11).
[00085] Mais ainda, em um caso que é julgado que a precisão do valor estimado de torque de roda não é aperfeiçoado mesmo pela execução das correções de um valor estimado de torque de roda 1 -3 quando nenhuma das condições (j)-(l) acima for estabelecida, a entrada de um valor estimado de torque de roda para o modelo de movimento C4 pode ser interrompida. Ainda, considerando que o propósito do controle de amortecimento de vibração da invenção está direcionado para aperfeiçoamentos na estabilidade operacional do motorista e o conforto de deslocamento do veículo, as condições onde as correções de um valor estimado de torque de roda 1-3 devem ser feitas, tais como onde uma roda cai em um estado de deslizamento; onde o veículo está se deslocando de forma retrógrada; onde qualquer irregularidade ocorre em um sensor de velocidade de roda, etc, são condições especiais no funcionamento do veículo, e, em alguns casos, qualquer outro controle para estabilizar o funcionamento do veículo e/ou assegurar a sua segurança pode ser executado, e portanto, a entrada do valor estimado de torque de roda no modelo de movimento C4 pode ser interrompida. Consequentemente, na estrutura de controle da Figura 2 (B), quando uma condição de (a)-(i) for estabelecida, a entrada de um valor estimado de torque de roda no modelo de movimento C4 pode ser interrompida. Ainda, em um caso em que uma roda cai em um estado de deslizamento, quando o grau de um deslizamento indicado por uma quantidade de estado de deslizamento de roda for maior do que um grau predeterminado, por exemplo, quando a quantidade de estado de deslizamento de roda está abaixo do valor predeterminado S no mapa da Figura 4, Kslip=0 pode ser ajustado como mostrado pela linha tracejada, de modo que a entrada do valor estimado de torque de roda no modelo de movimento C4 pode ser substancialmente interrompida. Também, quando uma condição de (a)-(i) é estabelecida, a execução de um controle de amortecimento de vibração pode ser parada (a correção de um torque solicitado de um motorista pode ser parada) colocando U (t)=0.
[00086] Apesar da explicação acima ter sido descrita com relação a modalidades da presente invenção, será aparente para aqueles versados na técnica que várias modificações e mudanças são possíveis, e que a presente invenção não está limitada às modalidades acima ilustradas e pode ser aplicada a vários dispositivos e aparelhos sem afastar-se dos conceitos da presente invenção.
[00087] Por exemplo, apesar do estimador de torque de roda (dispositivo de estimativa) ser incorporado no controlador de amortecimento de vibração na modalidade acima mencionada, um dispositivo de estimativa de torque de roda pode ser construído como uma unidade independente. Ainda, apesar do estimador de torque de roda ter sido explicado de modo a estimar o torque de roda da roda motriz durante o deslocamento do veículo na modalidade acima mencionada, o valor estimado de torque de roda de cada roda estimado da velocidade de roda correspondente pode ser corrigido para estimar os torques de roda de uma roda motriz e uma roda acionada durante a sua frenagem de acordo com a quantidade de estado de deslizamento de roda ou se a roda está rolando ou não para trás, e tais casos também pertencem ao escopo da presente invenção.
[00088] Mais ainda, apesar do valor estimado de torque de roda na modalidade acima mencionada ser estimado de uma velocidade de roda, o valor estimado de torque de roda pode ser aquele a ser estimado de um parâmetro outro que uma velocidade de roda e também tendo uma possibilidade de que o seu valor estimado e o seu valor real podem desviar um do outro durante o deslizamento de uma roda ou durante o rolamento para trás de uma roda.
[00089] Mais ainda, apesar do controle de amortecimento de vibração na modalidade acima descrita ser um controle de amortecimento de vibração no qual o modelo de movimento de massa suspensa ou o modelo de movimento de massa suspensa e de massa não-suspensa ser assumido para o modelo de movimento a ser utilizado e a teoria do regulador ótimo ser utilizada, o conceito da presente invenção pode ser aplicado para os controles que executam o amortecimento de vibração enquanto utilizando qualquer modelo de movimento outro que aqueles que estão sendo aqui introduzidos e/ou métodos de controle outros que o regulador ótimo, se utilizando um valor estimado de torque de roda, e tais casos estão incluídos dentro do escopo da presente invenção.
Claims (21)
1. Dispositivo de controle de amortecimento de vibração (50) de um veículo (10) que suprime uma vibração de oscilação ou saltos do veículo (10) pelo controle de uma saída de tração do veículo (10), que compreende uma parte de aquisição de valor estimado de torque de roda (C6) a qual adquire um valor estimado de um torque de roda (Tw) gerado sobre um local de contato de solo de uma roda (12RL, 12RR) do veículo (10) a uma superfície de estrada e que atua sobre a roda (12RL, 12RR); e uma parte de controle de torque motriz (C1, C1a, C4, C5, C2, 50a) a qual controla um torque motriz do veículo para suprimir as amplitudes de oscilação da vibração ou saltos com base no valor estimado de torque de roda (Tw); caracterizado pelo fato de que uma parte de aquisição de quantidade de estado de deslizamento (C6c, 50b) a qual adquire um valor de estado de deslizamento de roda (S) que indica uma condição de deslizamento da roda (12RL, 12RR) está ocorrendo, e um valor absoluto do valor estimado de torque de roda (Tw) ou uma variável controlada (U) do torque motriz é reduzido conforme um grau de um deslizamento indicado pela quantidade de estado de deslizamento de roda (S) é maior.
2. Dispositivo de acordo com a reivindicação 1, caracterizado pelo fato de que o valor estimado de torque de roda (Tw) é configurado em um valor negativo quando a roda (12RL, 12RR) está girando em sentido contrário.
3. Dispositivo de acordo com a reivindicação 1, caracterizado pelo fato de que a quantidade de estado de deslizamento de roda (S) é uma razão de uma velocidade da roda de uma roda motriz (12RL, 12RR) do veículo (10) e uma velocidade da roda de uma roda acionada do veículo (12FL, 12FR).
4. Dispositivo de acordo com a reivindicação 1, caracterizado pelo fato de que o valor estimado de torque de roda (Tw) é uma função de um valor diferencial de uma velocidade de roda (rw) detectada com um sensor de velocidade de roda (30RL, 30RR) de uma roda motriz (12RL, 12 RR) do veículo.
5. Dispositivo de acordo com a reivindicação 1, caracterizado pelo fato de que o valor estimado de torque de roda (Tw) é um valor estimado com base em uma velocidade de roda detectada com um sensor de velocidade de roda (30RL, 30RR) de uma roda motriz (12RL, 12RR) do veículo (10), e o valor estimado de torque de roda (Tw) é um valor estimado com base em uma velocidade rotacional (ne, no) de um eixo de saída de um dispositivo motriz (22) do veículo (10) quando o sensor de velocidade de roda (30RL, 30RR) é irregular.
6. Dispositivo de acordo com a reivindicação 1, caracterizado pelo fato de que o valor estimado de torque de roda (Tw) é um valor estimado com base em uma velocidade de roda (rw) detectada com um sensor de velocidade de roda (30RL, 30RR) de uma roda motriz (12 RL, 12RR) do veículo (10), e o controle de torque motriz com base no valor estimado de torque de roda (Tw) é parado quando o sensor de velocidade de roda (30RL, 30RR) é irregular.
7. Dispositivo de controle de amortecimento de vibração (50) de um veículo (10) que suprime uma vibração de oscilação ou saltos do veículo (10) pelo controle de uma saída de tração do veículo (10), que compreende uma parte de aquisição de valor estimado de torque de roda (C6) a qual adquire um valor estimado de um torque de roda (Tw) gerado sobre um local de contato de solo de uma roda (12RL, 12RR) do veículo (10) e uma superfície de estrada e que atua sobre a roda (12RL, 12RR); o valor estimado de torque de roda (Tw) sendo estimado com base em uma velocidade de roda detectada por um sensor de velocidade de roda (30RL, 30RR) da roda (12RL, 12RR); e uma parte de controle de torque motriz (C1, C1a, C4, C5, C2, 50a) a qual controla urn torque motriz do veículo (10) para suprimir as amplitudes de oscilação da vibração ou saltos com base no valor estimado de torque de roda (Tw); caracterizado pelo fato de que o dispositivo (50) controla o torque motriz do veículo (10) enquanto assumindo que o valor estimado de torque de roda (Tw) é um valor negativo quando o veículo (10) está deslocando-se de forma retrógrada.
8. Dispositivo de acordo com a reivindicação 7, caracterizado pelo fato de que o valor estimado de torque de roda (Tw) é um valor estimado com base em uma velocidade de roda (rw) detectada com um sensor de velocidade de roda (30RL, 30RR) de uma roda motriz (12RL, 12RR) do veículo (10), e o valor estimado de torque de roda (Tw) é um valor estimado com base em uma velocidade rotacional (ne, no) de um eixo de saída de um dispositivo motriz do veículo (10) quando o sensor de velocidade de roda (30RL, 30RR) é irregular.
9. Dispositivo de acordo com a reivindicação 7, caracterizado pelo fato de que o valor estimado de torque de roda (Tw) é um valor estimado com base em uma velocidade de roda (rw) detectada com um sensor de velocidade de roda (30RL, 30RR) de uma roda motriz (12RL, 12 RR) do veículo, e o controle de torque motriz com base no valor estimado de torque de roda (Tw) é parado quando o sensor de velocidade de roda (30RL, 30RR) é irregular.
10. Dispositivo de controle de amortecimento de vibração (50) de um veículo que suprime uma vibração de oscilação ou saltos do veículo (10) pelo controle de uma saída de tração do veículo, que compreende uma parte de aquisição de valor estimado de torque de roda (C6) a qual adquire um valor estimado de um torque de roda (Tw) gerado sobre um local de contato de solo de uma roda (12RL, 12RR) do veículo (10) e uma superfície de estrada e que atua sobre a roda (12RL, 12RR); e uma parte de controle de torque motriz (C1, C1a, C4, C5, C2, 50a) a qual controla um torque motriz do veículo (10) para suprimir as amplitudes de oscilação da vibração ou saltos com base no valor estimado de torque de roda (Tw); caracterizado pelo fato de que o controle do torque motriz baseado no valor estimado de torque de roda (Tw) é interrompido quando um grau de deslizamento expresso por um valor de estado de deslizamento de roda que indica uma condição de deslizamento da roda (12RL, 12RR)é maior do que um grau predeterminado ou quando o veículo (10) está deslocando-se de forma retrógrada.
11. Dispositivo de controle de amortecimento de vibração (50) de um veículo que suprime uma vibração de oscilação ou saltos do veículo (10) pelo controle de uma saída de tração dos veículos, que compreende uma parte de aquisição de valor estimado de torque de roda (C6) a qual adquire um valor estimado de um torque de roda (Tw) gerado sobre um local de contato de solo de uma roda (12RL, 12RR) do veículo (10) e uma superfície de estrada e que atua sobre a roda (12RL, 12RR); uma parte de controle de torque motriz (C1, C1a, C4, C5, C2, 50a) a qual controla um torque motriz do veículo (10) para suprimir as amplitudes de oscilação da vibração ou saltos com base no valor estimado de torque de roda (Tw); e uma parte de aquisição de quantidade de estado de deslizamento (C6c, 50b) a qual adquire um valor de estado de deslizamento de roda (S) que indica uma condição de deslizamento da roda (12RL, 12RR) de um dispositivo de controle de frenagem (50b) do veículo (10) para reduzir um deslizamento da roda; caracterizado pelo fato de que o dispositivo corrige uma variável controlada (U) do torque motriz com base no grau de um deslizamento expresso pela quantidade de estado de deslizamento de roda (S), em que a variável controlada (U) do torque motriz é reduzida quando o dispositivo de controle de frenagem (50b) é inoperável se comparado com quando o dispositivo de controle de frenagem (50b) é operável.
12. Dispositivo de acordo com a reivindicação 11, caracterizado pelo fato de que a variável controlada (U) do torque motriz da porção de controle de torque motriz (C1, C1a, C4, C5, C2, 50a) é determinada com base no valor estimado de torque de roda e um valor de acionamento solicitada por um motorista do veículo, e a variável controlada (U) do torque motriz com base no valor estimado de torque de roda (Tw) é reduzida para 0 quando o dispositivo de controle de frenagem (50b) é inoperável.
13. Dispositivo de acordo com a reivindicação 11, caracterizado pelo fato de que o dispositivo de controle de frenagem (50b) é pelo menos um escolhido do grupo que consiste em um controle de ABS, VSC e TRC sendo feito seletivamente operável por um motorista do veículo (10); e a variável controlada (U) do torque motriz é reduzida quando o dispositivo de controle de frenagem (50b) é tornado inoperável por uma seleção do motorista se comparado com quando o dispositivo de controle de frenagem (50b) é operável.
14. Dispositivo de acordo com a reivindicação 11, caracterizado pelo fato de que o dispositivo de controle de frenagem (50b) é uma parte de um VDIM sendo feito seletivamente operável por um motorista do veículo; e a variável controlada (U) do torque motriz é reduzida quando o VDIM é tornado inoperável por uma seleção do motorista.
15. Dispositivo de acordo com a reivindicação 11, caracterizado por reduzir a variável controlada (U) do torque motriz quando o quando o dispositivo de controle de frenagem (50b) é inoperável devido a um dispositivo de frenagem do veículo sendo irregular se comparado com quando o dispositivo de controle de frenagem (50b) é operável.
16. Dispositivo de acordo com a reivindicação 11, caracterizado por corrigir um valor absoluto do valor estimado de torque de roda (Tw) ou a variável controlada (U)do torque motriz menor conforme um grau de um deslizamento expresso pela quantidade de estado de deslizamento de roda (S) é maior.
17. Dispositivo (C6) para estimar um torque de roda que atua entre uma roda (12RL, 12RR) de um veículo (10) e uma superfície de estrada, que compreende: uma parte de estimativa de torque (C6) a qual estima um valor estimado de um torque de roda (Tw) gerado sobre um local de contato de solo da roda (12RL, 12RR) e a superfície de estrada e que atua sobre a roda; uma parte de computação de quantidade de estado de deslizamento (C6c) a qual computa um valor de estado de deslizamento de roda (S) a qual indica uma condição de deslizamento da roda (12RL, 12RR); caracterizado pelo fato de que uma parte de correção de torque de roda (C6b) a qual corrige o valor estimado de torque de roda de modo que o valor absoluto do valor estimado de torque de roda (Tw) torne-se menor quando um grau de um deslizamento expresso pela quantidade de estado de deslizamento de roda (S) é maior.
18. Dispositivo de acordo com a reivindicação 17, caracterizado por computar o valor estimado de torque de roda (Tw) como uma valor negativo quando a roda está rodando para trás.
19. Dispositivo de acordo com a reivindicação 17, caracterizado pelo fato de que a quantidade de estado de deslizamento de roda (S) é uma razão de uma velocidade da roda de uma roda motriz (12RL, 12RR) do veículo (10) e uma velocidade da roda de uma roda acionada (12FL, 12FR) do veículo (10).
20. Dispositivo de acordo com a reivindicação 17, caracterizado pelo fato de que o valor estimado de torque de roda (Tw) é uma função de um valor diferencial de uma velocidade de roda (rw) detectada por um sensor de velocidade de roda (30RL, 30RR)de uma roda motriz (12RL, 12RR) do veículo (10).
21. Dispositivo (C6) para estimar um torque de roda que atua entre uma roda (12RL, 12RR) de um veículo (10) e uma superfície de estrada, que compreende: uma parte de estimativa de torque (C6a) a qual, com base em uma velocidade de roda (rw) detectada por um sensor de velocidade de roda (30RL, 30RR) da roda (12RL, 12RR), estima um valor estimado de um torque de roda (Tw) gerado sobre um local de contato com o solo da roda (12RL, 12RR) e a superfície de estrada e que atua sobre a roda (12RL, 12RR); caracterizado pelo fato de que uma parte de correção de torque de roda (C6b) a qual corrige o valor estimado de torque de roda (Tw) para um valor negativo enquanto o veículo (10) está deslocando-se de forma retrógrada.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006-284642 | 2006-10-19 | ||
| JP2006284642A JP4600381B2 (ja) | 2006-10-19 | 2006-10-19 | 車両の車輪トルク推定装置及び制振制御装置 |
| JP2007-050849 | 2007-02-28 | ||
| JP2007050849A JP4692499B2 (ja) | 2007-02-28 | 2007-02-28 | 車両の制振制御装置 |
| PCT/JP2007/070681 WO2008050782A1 (fr) | 2006-10-19 | 2007-10-17 | Dispositif de commande d'amortissement des vibrations pour véhicule |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BRPI0717522A2 BRPI0717522A2 (pt) | 2013-10-22 |
| BRPI0717522B1 true BRPI0717522B1 (pt) | 2020-07-14 |
Family
ID=39324577
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BRPI0717522-1A BRPI0717522B1 (pt) | 2006-10-19 | 2007-10-17 | Dispositivo de controle de amortecimento de vibração de um veículo e dispositivo para estimar um torque de roda que atua entre uma roda de um veículo e uma superfície de estrada |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8340864B2 (pt) |
| EP (3) | EP2078653B1 (pt) |
| CN (2) | CN102582388B (pt) |
| BR (1) | BRPI0717522B1 (pt) |
| RU (1) | RU2412839C2 (pt) |
| WO (1) | WO2008050782A1 (pt) |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8140238B2 (en) * | 2007-10-26 | 2012-03-20 | Ford Global Technologies, Llc | Detection and control of power induced hop during traction control in a vehicle |
| US7853389B2 (en) | 2007-10-29 | 2010-12-14 | Ford Global Technologies, Llc | Traction control for performance and demonstration spin |
| US8244445B2 (en) | 2007-10-30 | 2012-08-14 | Ford Global Technologies, Llc | Stuck vehicle with time and pedal related traction control |
| JP4872884B2 (ja) * | 2007-11-01 | 2012-02-08 | トヨタ自動車株式会社 | ディーゼルエンジン車両の制振制御装置 |
| DE102008015604A1 (de) * | 2008-03-26 | 2009-10-01 | Audi Ag | Verfahren zum Überwachen von Betriebszuständen von Kraftfahrzeugen |
| JP5262811B2 (ja) * | 2008-10-31 | 2013-08-14 | トヨタ自動車株式会社 | 車両のバネ上制振制御装置 |
| DE112009002066T5 (de) * | 2008-10-31 | 2011-07-21 | Toyota Jidosha Kabushiki Kaisha, Aichi-ken | Antriebskraftsteuervorrichtung und Steuerverfahren einer Antriebskraftsteuervorrichtung |
| JP5146546B2 (ja) | 2009-01-13 | 2013-02-20 | トヨタ自動車株式会社 | 車両制御装置 |
| RU2498913C2 (ru) * | 2009-05-13 | 2013-11-20 | Тойота Дзидося Кабусики Кайся | Устройство управления амортизацией колебаний |
| JP5347702B2 (ja) * | 2009-05-13 | 2013-11-20 | トヨタ自動車株式会社 | 車両のバネ上制振制御装置 |
| JP5444111B2 (ja) * | 2009-05-13 | 2014-03-19 | トヨタ自動車株式会社 | 車両のバネ上制振制御装置 |
| WO2011042928A1 (ja) * | 2009-10-05 | 2011-04-14 | トヨタ自動車株式会社 | 車両制振制御装置 |
| JP5447185B2 (ja) * | 2010-05-27 | 2014-03-19 | 日産自動車株式会社 | 車両の制振制御装置 |
| JP5782792B2 (ja) | 2010-05-27 | 2015-09-24 | 日産自動車株式会社 | 車両の制振制御装置 |
| JP5488203B2 (ja) * | 2010-05-31 | 2014-05-14 | 日産自動車株式会社 | 車両の制振制御装置 |
| JP5540894B2 (ja) * | 2010-05-31 | 2014-07-02 | 日産自動車株式会社 | 車両の制振制御装置 |
| JP5615357B2 (ja) * | 2010-06-07 | 2014-10-29 | トヨタ自動車株式会社 | ハイブリッド車両およびその制御方法 |
| DE102010029937A1 (de) * | 2010-06-10 | 2012-05-03 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Reduzieren von Schwingungen auf einer Abtriebswelle eines Antriebsmotors |
| JP5573456B2 (ja) * | 2010-07-23 | 2014-08-20 | 日産自動車株式会社 | 電動車両の制振制御装置および電動車両の制振制御方法 |
| JP5696405B2 (ja) * | 2010-09-07 | 2015-04-08 | 日産自動車株式会社 | 車体制振制御装置 |
| JP5405440B2 (ja) * | 2010-11-15 | 2014-02-05 | 日立建機株式会社 | 電気駆動車両 |
| MX338749B (es) * | 2012-05-14 | 2016-04-29 | Nissan Motor | Dispositivo de control de vehiculo y metodo de control de vehiculo. |
| WO2013172281A1 (ja) * | 2012-05-14 | 2013-11-21 | 日産自動車株式会社 | 車両の制御装置及び車両の制御方法 |
| WO2013172282A1 (ja) * | 2012-05-14 | 2013-11-21 | 日産自動車株式会社 | 車両の制御装置及び車両の制御方法 |
| JP5740358B2 (ja) | 2012-06-29 | 2015-06-24 | 本田技研工業株式会社 | サスペンション制御装置 |
| CN103538578A (zh) * | 2012-07-09 | 2014-01-29 | 熊荣华 | 创新参数实时反馈与控制的汽车制动防抱死系统 |
| WO2014057537A1 (ja) * | 2012-10-10 | 2014-04-17 | トヨタ自動車株式会社 | 車輪制御装置、車両、車輪制御方法 |
| JP5879251B2 (ja) * | 2012-12-14 | 2016-03-08 | 本田技研工業株式会社 | 電動機の駆動制御装置 |
| JP6255767B2 (ja) * | 2013-07-24 | 2018-01-10 | 三菱自動車工業株式会社 | 自動車の制御装置 |
| CN105452041A (zh) * | 2013-08-05 | 2016-03-30 | 丰田自动车株式会社 | 车辆的减振控制装置 |
| JP6167363B2 (ja) * | 2013-09-12 | 2017-07-26 | 日立オートモティブシステムズ株式会社 | 電動車両の制御装置及び電動車両の制御方法 |
| JP6272178B2 (ja) * | 2014-08-06 | 2018-01-31 | 株式会社デンソー | 回転電機の制御装置 |
| JP6274139B2 (ja) * | 2015-03-21 | 2018-02-07 | トヨタ自動車株式会社 | 車両の制振制御装置 |
| JP6341137B2 (ja) * | 2015-04-08 | 2018-06-13 | トヨタ自動車株式会社 | 車両の運転支援制御装置 |
| EP3100601B1 (en) * | 2015-06-02 | 2020-02-19 | AGCO International GmbH | Positioning receiver height determination for mobile machines |
| JP6578584B2 (ja) * | 2015-08-25 | 2019-09-25 | 日立オートモティブシステムズ株式会社 | 電動車両の制御装置 |
| JP6519871B2 (ja) * | 2015-10-08 | 2019-05-29 | 日立オートモティブシステムズ株式会社 | 電動車両の制御装置、電動車両の制御システム及び電動車両の制御方法 |
| US10286745B2 (en) * | 2016-11-07 | 2019-05-14 | Ford Global Technologies, Llc | Vehicle damping control |
| US11292308B2 (en) * | 2016-12-09 | 2022-04-05 | Hitachi Astemo, Ltd. | Vehicle motion state estimation apparatus |
| JP6627829B2 (ja) * | 2017-07-20 | 2020-01-08 | トヨタ自動車株式会社 | 車両の制振制御装置 |
| CN109163051B (zh) * | 2018-09-20 | 2024-02-13 | 佛山科学技术学院 | 一种用于轮椅的减震器 |
| RU2735455C1 (ru) * | 2019-08-27 | 2020-11-02 | Федеральное государственное бюджетное учреждение науки Институт машиноведения Уральского отделения Российской академии наук | Способ гашения низкочастотных колебаний в трансмиссии транспортной машины |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61166711A (ja) * | 1985-01-16 | 1986-07-28 | Toyota Motor Corp | サスペンシヨン制御装置 |
| JPH06104450B2 (ja) * | 1986-01-29 | 1994-12-21 | 財団法人鉄道総合技術研究所 | 車両の振動制御装置 |
| US4871039A (en) * | 1987-04-03 | 1989-10-03 | Koyo Seiko Co., Ltd. | Power steering system incorporating electric motor |
| JPS6412961A (en) | 1987-07-03 | 1989-01-17 | Mazda Motor | Slip control device for automobile |
| JPH01271617A (ja) | 1988-04-20 | 1989-10-30 | Mitsubishi Motors Corp | 車両のスリップ制御装置 |
| US5183127A (en) * | 1989-09-13 | 1993-02-02 | Mazda Motor Corporation | Suspension-traction total control system |
| JP2839912B2 (ja) | 1989-09-28 | 1998-12-24 | マツダ株式会社 | 車両のサスペンション装置 |
| US5137105A (en) * | 1990-01-19 | 1992-08-11 | Honda Giken Kogyo Kabushiki Kaisha | System and method for controlling torque of driving wheel |
| JPH04166632A (ja) * | 1990-10-31 | 1992-06-12 | Mitsubishi Motors Corp | エンジンの出力制御装置 |
| JPH0585342A (ja) * | 1991-09-25 | 1993-04-06 | Mazda Motor Corp | 車両のスリツプ制御装置 |
| US5275474A (en) * | 1991-10-04 | 1994-01-04 | General Motors Corporation | Vehicle wheel slip control on split coefficient surface |
| JPH06122332A (ja) | 1992-10-09 | 1994-05-06 | Nippondenso Co Ltd | 車両のスリップ制御装置 |
| JP2981965B2 (ja) * | 1993-11-29 | 1999-11-22 | 本田技研工業株式会社 | 車両の駆動力制御装置 |
| JP3304575B2 (ja) * | 1993-12-17 | 2002-07-22 | トヨタ自動車株式会社 | アンチロック制御装置 |
| JPH07324641A (ja) | 1994-04-07 | 1995-12-12 | Mitsubishi Motors Corp | 車両の駆動力制御装置 |
| JPH07333239A (ja) * | 1994-06-09 | 1995-12-22 | Toyota Motor Corp | 車両のアンチスキッド制御装置 |
| EP0706906A3 (en) * | 1994-10-12 | 1997-07-02 | Unisia Jecs Corp | Method and device for controlling the damping force of a vehicle suspension |
| US5711024A (en) * | 1994-11-25 | 1998-01-20 | Itt Automotive Europe Gmbh | System for controlling yaw moment based on an estimated coefficient of friction |
| US5852787A (en) * | 1996-09-03 | 1998-12-22 | Ford Global Technologies, Inc. | Vehicle suspension control |
| JPH1135298A (ja) * | 1997-07-15 | 1999-02-09 | Toyota Autom Loom Works Ltd | 産業車両用揺動制御装置 |
| JPH1137872A (ja) | 1997-07-24 | 1999-02-12 | Aisin Seiki Co Ltd | タイヤトルク計測装置およびアンチスキッド制御装置 |
| DE10009924B4 (de) * | 2000-03-01 | 2005-11-17 | Sauer-Danfoss Holding Aps | Einrichtung zur Dämpfung von Nickschwingungen eines motorgetriebenen Fahrzeugs |
| JP2001349243A (ja) | 2000-06-07 | 2001-12-21 | Isuzu Motors Ltd | エンジンの燃料噴射制御装置 |
| US6498975B1 (en) * | 2000-07-18 | 2002-12-24 | Ford Global Technologies, Inc. | Method for controlling a transfer case which reacts to steering wheel angle position |
| JP4296700B2 (ja) | 2000-09-14 | 2009-07-15 | いすゞ自動車株式会社 | 燃料噴射量設定装置 |
| JP4356305B2 (ja) | 2002-11-19 | 2009-11-04 | 株式会社デンソー | 車両制御装置 |
| KR101179284B1 (ko) * | 2003-03-27 | 2012-09-03 | 토로트랙 (디벨로프먼트) 리미티드 | 무단 변속기의 제어 방법 |
| JP2005069897A (ja) | 2003-08-25 | 2005-03-17 | Bridgestone Corp | 入力検出装置、及び、試験車両 |
| JP4172391B2 (ja) * | 2003-12-24 | 2008-10-29 | 株式会社デンソー | 車両統合制御システムおよびプログラム |
| JP4161923B2 (ja) * | 2004-03-09 | 2008-10-08 | 株式会社デンソー | 車両安定化制御システム |
| JP4515201B2 (ja) | 2004-09-06 | 2010-07-28 | 株式会社デンソー | 車両安定化制御システム |
| JP4289294B2 (ja) | 2004-12-20 | 2009-07-01 | トヨタ自動車株式会社 | トラクション制御装置 |
| JP2006264628A (ja) * | 2005-03-25 | 2006-10-05 | Toyota Motor Corp | 車輌の制駆動力制御装置 |
| JP2006281925A (ja) | 2005-03-31 | 2006-10-19 | Toyota Motor Corp | 車両統合制御装置 |
-
2007
- 2007-10-17 WO PCT/JP2007/070681 patent/WO2008050782A1/ja active Application Filing
- 2007-10-17 BR BRPI0717522-1A patent/BRPI0717522B1/pt not_active IP Right Cessation
- 2007-10-17 EP EP07830415.1A patent/EP2078653B1/en active Active
- 2007-10-17 EP EP18178328.3A patent/EP3428029B1/en active Active
- 2007-10-17 CN CN201210019876.1A patent/CN102582388B/zh not_active Expired - Fee Related
- 2007-10-17 US US12/445,133 patent/US8340864B2/en active Active
- 2007-10-17 EP EP17172957.7A patent/EP3235699B1/en active Active
- 2007-10-17 CN CN201210019879.5A patent/CN102514462B/zh not_active Expired - Fee Related
- 2007-10-17 RU RU2009108952/11A patent/RU2412839C2/ru active
Also Published As
| Publication number | Publication date |
|---|---|
| RU2412839C2 (ru) | 2011-02-27 |
| EP3428029A3 (en) | 2019-04-10 |
| EP2078653A4 (en) | 2010-04-07 |
| CN102582388B (zh) | 2014-07-09 |
| EP3428029A2 (en) | 2019-01-16 |
| RU2009108952A (ru) | 2010-11-27 |
| EP2078653A1 (en) | 2009-07-15 |
| CN102514462B (zh) | 2014-04-09 |
| EP3235699A1 (en) | 2017-10-25 |
| CN102582388A (zh) | 2012-07-18 |
| US20100241305A1 (en) | 2010-09-23 |
| US8340864B2 (en) | 2012-12-25 |
| EP3428029B1 (en) | 2022-03-09 |
| BRPI0717522A2 (pt) | 2013-10-22 |
| EP2078653B1 (en) | 2021-12-01 |
| EP3235699B1 (en) | 2020-12-09 |
| CN102514462A (zh) | 2012-06-27 |
| WO2008050782A1 (fr) | 2008-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BRPI0717522B1 (pt) | Dispositivo de controle de amortecimento de vibração de um veículo e dispositivo para estimar um torque de roda que atua entre uma roda de um veículo e uma superfície de estrada | |
| JP4600381B2 (ja) | 車両の車輪トルク推定装置及び制振制御装置 | |
| KR100530288B1 (ko) | 차량 구동력 제어 장치 | |
| JP4515201B2 (ja) | 車両安定化制御システム | |
| US9133774B2 (en) | Vehicular vibration damping control device and vehicle mounted with vibration damping control device | |
| WO2010050070A1 (ja) | 車両の制振制御装置 | |
| US20030163237A1 (en) | Method of controlling traveling stability of vehicle | |
| JP4692499B2 (ja) | 車両の制振制御装置 | |
| CN111907528B (zh) | 车辆的道路倾斜度估算装置 | |
| JP5099167B2 (ja) | 車両の制振制御装置 | |
| KR100767978B1 (ko) | 차량의 속도를 나타내는 값을 결정하기 위한 방법 및 장치 | |
| JPH11351864A (ja) | 道路勾配推定装置 | |
| JP5088393B2 (ja) | 車両の制振制御装置 | |
| US7113863B2 (en) | Internal combustion engine control system | |
| EP1529677A2 (en) | Vehicle behavior estimating device and vehicle behavior controlling device | |
| Li et al. | Reference Velocity Estimation with Variable Gain Based on Powertrain Dynamics for Production Hybrid Electric Vehicle | |
| JP2021191194A (ja) | 電動車両の制振制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06T | Formal requirements before examination [chapter 6.20 patent gazette] | ||
| B11E | Dismissal acc. art. 34 of ipl - requirements for examination incomplete | ||
| B11N | Dismissal: publication cancelled [chapter 11.14 patent gazette] |
Free format text: ANULADA A PUBLICACAO CODIGO 11.5 NA RPI NO 2487 DE 04/09/2018 POR TER SIDO INDEVIDA. |
|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06A | Patent application procedure suspended [chapter 6.1 patent gazette] | ||
| B06A | Patent application procedure suspended [chapter 6.1 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 10 (DEZ) ANOS CONTADOS A PARTIR DE 14/07/2020, OBSERVADAS AS CONDICOES LEGAIS. |
|
| B21F | Lapse acc. art. 78, item iv - on non-payment of the annual fees in time |
Free format text: REFERENTE A 16A ANUIDADE. |
|
| B24J | Lapse because of non-payment of annual fees (definitively: art 78 iv lpi, resolution 113/2013 art. 12) |
Free format text: EM VIRTUDE DA EXTINCAO PUBLICADA NA RPI 2744 DE 08-08-2023 E CONSIDERANDO AUSENCIA DE MANIFESTACAO DENTRO DOS PRAZOS LEGAIS, INFORMO QUE CABE SER MANTIDA A EXTINCAO DA PATENTE E SEUS CERTIFICADOS, CONFORME O DISPOSTO NO ARTIGO 12, DA RESOLUCAO 113/2013. |