WO2019146381A1 - 作業車両 - Google Patents
作業車両 Download PDFInfo
- Publication number
- WO2019146381A1 WO2019146381A1 PCT/JP2018/048624 JP2018048624W WO2019146381A1 WO 2019146381 A1 WO2019146381 A1 WO 2019146381A1 JP 2018048624 W JP2018048624 W JP 2018048624W WO 2019146381 A1 WO2019146381 A1 WO 2019146381A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- steering
- vehicle body
- switch
- correction
- vehicle
- Prior art date
Links
- 238000012937 correction Methods 0.000 claims description 343
- 238000001514 detection method Methods 0.000 claims description 62
- 230000007246 mechanism Effects 0.000 claims description 45
- 238000005259 measurement Methods 0.000 claims description 38
- 238000003825 pressing Methods 0.000 claims description 28
- 230000000903 blocking effect Effects 0.000 claims description 3
- 230000005540 biological transmission Effects 0.000 description 24
- 230000008859 change Effects 0.000 description 20
- 238000006073 displacement reaction Methods 0.000 description 18
- 238000013459 approach Methods 0.000 description 11
- 230000007935 neutral effect Effects 0.000 description 10
- 230000001133 acceleration Effects 0.000 description 9
- 230000004048 modification Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 230000001965 increasing effect Effects 0.000 description 7
- 244000025254 Cannabis sativa Species 0.000 description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 5
- 230000035945 sensitivity Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- 239000012530 fluid Substances 0.000 description 4
- 238000003306 harvesting Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 3
- 239000000446 fuel Substances 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 238000004040 coloring Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000013016 damping Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 239000003337 fertilizer Substances 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 239000000575 pesticide Substances 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000000881 depressing effect Effects 0.000 description 1
- 238000009792 diffusion process Methods 0.000 description 1
- 238000010790 dilution Methods 0.000 description 1
- 239000012895 dilution Substances 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 230000003028 elevating effect Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000001141 propulsive effect Effects 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 238000003971 tillage Methods 0.000 description 1
- 238000010200 validation analysis Methods 0.000 description 1
- 238000010792 warming Methods 0.000 description 1
Images






































Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/007—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow
- A01B69/008—Steering or guiding of agricultural vehicles, e.g. steering of the tractor to keep the plough in the furrow automatic
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B51/00—Undercarriages specially adapted for mounting-on various kinds of agricultural tools or apparatus
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/027—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means comprising intertial navigation means, e.g. azimuth detector
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0276—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle
- G05D1/0278—Control of position or course in two dimensions specially adapted to land vehicles using signals provided by a source external to the vehicle using satellite positioning signals, e.g. GPS
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B63/00—Lifting or adjusting devices or arrangements for agricultural machines or implements
- A01B63/02—Lifting or adjusting devices or arrangements for agricultural machines or implements for implements mounted on tractors
- A01B63/10—Lifting or adjusting devices or arrangements for agricultural machines or implements for implements mounted on tractors operated by hydraulic or pneumatic means
- A01B63/1006—Lifting or adjusting devices or arrangements for agricultural machines or implements for implements mounted on tractors operated by hydraulic or pneumatic means the hydraulic or pneumatic means structurally belonging to the tractor
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01B—SOIL WORKING IN AGRICULTURE OR FORESTRY; PARTS, DETAILS, OR ACCESSORIES OF AGRICULTURAL MACHINES OR IMPLEMENTS, IN GENERAL
- A01B69/00—Steering of agricultural machines or implements; Guiding agricultural machines or implements on a desired track
- A01B69/003—Steering or guiding of machines or implements pushed or pulled by or mounted on agricultural vehicles such as tractors, e.g. by lateral shifting of the towing connection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/20—Off-Road Vehicles
- B60Y2200/22—Agricultural vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
Landscapes
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Mechanical Engineering (AREA)
- Soil Sciences (AREA)
- Environmental Sciences (AREA)
- Aviation & Aerospace Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Guiding Agricultural Machines (AREA)
Abstract
簡単に車体の操舵を行うことができる作業車両を提供する。作業車両(1)は、走行可能な車体(3)と、車体(3)の操舵を回転の操作によって行うステアリングハンドル(30)と、ステアリングハンドル(30)とは別に、車体(3)の操舵を行う操舵スイッチ(153)と、を備えている。操舵スイッチ(153)は、車体(3)の操舵を押圧の操作又はスライドの操作によって行うスイッチであってもよい。また、操舵スイッチ(153)は、ステアリングハンドル(30)の周囲に設けられていてもよい。
Description
本発明は、例えば、作業車両に関する。
従来、農作業機として特許文献1が知られている。
特許文献1の農作業機は、手動操舵による手動走行と、基準走行ラインに平行に設定される設定走行ラインに沿って自動操舵により走行する自動走行とを切替自在な走行機体と、手動走行と自動走行とを切替自在な切替スイッチとを備えている。
また、従来、複数の操作具が設けられた作業車両として特許文献2が知られている。特許文献2では、制御コントローラと、第1油圧弁及び第2油圧弁と、操作ユニットとを備え、操作ユニットには、第1単一操作用操作具及び第2単一操作用操作具が装着されている。
特許文献1の農作業機は、手動操舵による手動走行と、基準走行ラインに平行に設定される設定走行ラインに沿って自動操舵により走行する自動走行とを切替自在な走行機体と、手動走行と自動走行とを切替自在な切替スイッチとを備えている。
また、従来、複数の操作具が設けられた作業車両として特許文献2が知られている。特許文献2では、制御コントローラと、第1油圧弁及び第2油圧弁と、操作ユニットとを備え、操作ユニットには、第1単一操作用操作具及び第2単一操作用操作具が装着されている。
また、特許文献1の農作業機は、手動操舵による手動走行と、基準走行ラインに平行に設定される設定走行ラインに沿って自動操舵により走行する自動走行とを切替自在な走行機体と、手動走行と自動走行とを切替自在な切替スイッチとを備えている。また、農作業機は、畝に沿って走行中に右指示ボタンを押した後、基準走行ラインの始点が設定され、走行中に左指示ボタンを押すことによって基準走行ラインの終点が設定される。即ち、自動操舵前に基準走行ラインの設定を行っている。
特許文献1の農作業機では、ステアリングハンドルの手動操舵によって運転者が機体の操舵を行ったり、自動操舵によって設定走行ラインに沿って自動的に機体の操舵を行うことができる。しかしながら、農作業機の走行中において、様々な状況が変化した場合に当該変化した状況に応じて機体の操舵を素早く適正に行うことが難しいのが実情である。また、特許文献1の農作業機では、GPS等による機体の位置の検出をして基準走行ラインの設定、設定走行ライン等を行っているため、機体の操舵、走行等においてGPS等の位置の測位の影響を軽減することができないのが実情である。
また、特許文献2の作業車両では、操作を行い易くするために、操作ユニットに対して、第1単一操作用操作具及び第2単一操作用操作具等の配置を適正な位置に設定している。しかしながら、特許文献1のように、操作具の配置を変えることによって、操作を行い易くすることには限界があり、より操作性の向上が求められているのが実情である。
また、特許文献1の農作業機では、切替スイッチによって手動走行から自動走行に切り換えることにより、簡単に自動走行を行うことができる。しかしながら、特許文献1の自動走行においては、測位装置の測位の精度が低下した場合等に農作業機の位置の補正を行うことができないのが実情である。
また、特許文献1の農作業機では、切替スイッチによって手動走行から自動走行に切り換えることにより、簡単に自動走行を行うことができる。しかしながら、特許文献1の自動走行においては、測位装置の測位の精度が低下した場合等に農作業機の位置の補正を行うことができないのが実情である。
本発明は上記問題点に鑑み、簡単に車体の操舵を行うことができる作業車両を提供することを目的とする。また、位置検出装置で検出された車体の位置を用い操舵等を行う場合であっても位置検出装置による検出精度の影響を軽減することができる作業車両を提供することを目的とする。
また、本発明は、操作部材の操作性を向上させた作業車両を提供することを目的とする。
また、本発明は、操作部材の操作性を向上させた作業車両を提供することを目的とする。
また、本発明は、自動操舵において簡単に位置の補正を行うことができる作業車両を提供することを目的とする。
この技術的課題を解決するための本発明の技術的手段は、以下に示す点を特徴とする。
本発明の一態様に係る作業車両は、走行可能な車体と、前記車体の操舵を回転の操作によって行うステアリングハンドルと、前記ステアリングハンドルとは別に、前記車体の操舵を行う操舵スイッチと、を備えている。
前記操舵スイッチは、前記車体の操舵を押圧の操作又はスライドの操作によって行うスイッチである。
本発明の一態様に係る作業車両は、走行可能な車体と、前記車体の操舵を回転の操作によって行うステアリングハンドルと、前記ステアリングハンドルとは別に、前記車体の操舵を行う操舵スイッチと、を備えている。
前記操舵スイッチは、前記車体の操舵を押圧の操作又はスライドの操作によって行うスイッチである。
前記操舵スイッチは、前記ステアリングハンドルの周囲に設けられている。
前記ステアリングハンドルを回転可能に支持するステアリングシャフトを備え、前記操舵スイッチは、前記ステアリングシャフトの周囲に設けられている。
前記操舵スイッチは、前記車体を一方に操舵する第1操舵部と、前記車体を他方に操舵する第2操舵部とを含んでいる。
前記ステアリングハンドルを回転可能に支持するステアリングシャフトを備え、前記操舵スイッチは、前記ステアリングシャフトの周囲に設けられている。
前記操舵スイッチは、前記車体を一方に操舵する第1操舵部と、前記車体を他方に操舵する第2操舵部とを含んでいる。
作業車両は、前記車体に設けられ、且つ測位衛星の信号に基づいて前記車体の位置を検出する位置検出装置と、前記位置検出装置で検出された前記車体の位置に基づいて前記車体を自動操舵する自動操舵機構と、を備え、前記操舵スイッチは、前記押圧の操作又はスライドの操作が行われた際に前記位置検出装置で検出された前記車体の位置の補正を指令し、前記自動操舵機構は、前記操舵スイッチの押圧の操作又はスライドの操作により補正された前記車体の位置である補正車体位置と、走行予定ラインに基づいて前記車体を自動操舵する。
作業車両は、走行可能な車体と、前記車体の操舵を回転の操作によって行うステアリングハンドルと、前記車体に設けられ、且つ測位衛星の信号に基づいて前記車体の位置を検出する位置検出装置と、前記位置検出装置で検出された前記車体の位置の補正を指令する補正スイッチと、前記操舵スイッチの操作により補正された前記車体の位置である補正車体位置と、走行予定ラインに基づいて前記車体を自動操舵する自動操舵機構と、を備えている。
前記補正スイッチは、前記車体の幅方向における一方側の前記車両の位置の補正を指令する第1補正部と、前記車体の幅方向における他方側の前記車両の位置の補正を指令する第2補正部とを含んでいる。
前記補正スイッチが接続され、且つ、前記自動操舵機構を制御する制御装置を備え、前記制御装置は、前記補正スイッチの操作回数に基づいて、前記車体の位置の補正量を設定する。
前記補正スイッチが接続され、且つ、前記自動操舵機構を制御する制御装置を備え、前記制御装置は、前記補正スイッチの操作回数に基づいて、前記車体の位置の補正量を設定する。
前記制御装置は、前記補正スイッチの操作量に基づいて、前記車体の位置の補正量を設定する。
前記自動操舵と、前記ステアリングハンドルによる手動操舵とを切り換える操舵切換スイッチを備えている。
本発明の他の態様に係る作業車両は、運転席と、前記運転席の前方又は側方に設けられた操作台と、を備え、前記操作部材は、前記操作台に装着された状態で操作可能な第1状態と、前記操作台から取り外された状態で操作可能な第2状態とに位置変更可能である。
前記自動操舵と、前記ステアリングハンドルによる手動操舵とを切り換える操舵切換スイッチを備えている。
本発明の他の態様に係る作業車両は、運転席と、前記運転席の前方又は側方に設けられた操作台と、を備え、前記操作部材は、前記操作台に装着された状態で操作可能な第1状態と、前記操作台から取り外された状態で操作可能な第2状態とに位置変更可能である。
前記操作部材は、前記第1状態では前記操作台に装着され且つ前記第2状態では前記操作台から取り外される操作部と、前記操作部に接続されたコード部であって、前記第1状態では前記操作台内に収容され且つ前記第2状態では前記操作部と共に移動するコード部と、を有している。
前記操作部は、前記第2状態では前記運転席の側方又は後方に位置する。
前記操作部は、前記第2状態では前記運転席の側方又は後方に位置する。
前記操作台は、前記操作部が装着される凹部と、前記操作部を凹部に装着した場合に前記コード部を収容するカバーとを有している。
前記操作部材は、操作を推奨することを報知する報知部を有している。
作業車両は、車体と、前記車体の操舵を行うステアリングハンドルと、を備え、前記操作部材は、前記ステアリングハンドルとは別に前記車体の操舵を行う。
前記操作部材は、操作を推奨することを報知する報知部を有している。
作業車両は、車体と、前記車体の操舵を行うステアリングハンドルと、を備え、前記操作部材は、前記ステアリングハンドルとは別に前記車体の操舵を行う。
作業車両は、車体と、前記車体の操舵を行うステアリングハンドルと、前記車体に設けられ、且つ測位衛星の信号に基づいて前記車体の位置を検出可能な測位装置と、を備え、前記操作部材は、前記測位装置で検出された前記車体の位置の補正を指令する補正スイッチである。
前記補正スイッチの操作により補正された前記車体の位置である補正位置と走行予定ラインとに基づいて前記車体を操舵する操舵装置を備えている。
前記補正スイッチの操作により補正された前記車体の位置である補正位置と走行予定ラインとに基づいて前記車体を操舵する操舵装置を備えている。
本発明のさらに他の態様に係る作業車両は、車体と、前記車体の操舵を行うステアリングハンドルと、前記車体に設けられ且つ測位衛星の信号に基づいて前記車体の位置を検出する測位装置と、前記測位装置で検出された前記車体の位置に基づいて、前記ステアリングハンドルによる手動操舵とは別に前記車体の操舵を自動操舵する自動操舵機構と、前記測位装置で検出された前記車体の位置の補正量を設定可能な補正スイッチと、前記自動操舵機構の自動操舵を制御し且つ前記補正スイッチの所定の操作における補正量を変更可能な制御装置と、を備えている。
前記自動操舵機構は、前記補正量に基づいて補正された前記車体の位置である補正車体位置と走行予定ラインとに基づいて前記車体を自動操舵する。
前記車体の幅方向の一方側に設けられた第1車輪と、前記車体の幅方向の他方側に設けられた第2車輪とを有する走行装置と、前記第1車輪及び前記第2車輪のいずれかの制動が可能な制動装置と、を備え、前記制動装置は、前記車体の位置と走行予定ラインとの偏差が所定以上である場合に前記偏差を解消すべく、前記第1車輪及び前記第2車輪のいずれかの制動を行う。
前記車体の幅方向の一方側に設けられた第1車輪と、前記車体の幅方向の他方側に設けられた第2車輪とを有する走行装置と、前記第1車輪及び前記第2車輪のいずれかの制動が可能な制動装置と、を備え、前記制動装置は、前記車体の位置と走行予定ラインとの偏差が所定以上である場合に前記偏差を解消すべく、前記第1車輪及び前記第2車輪のいずれかの制動を行う。
前記測位装置は、前記車体の慣性を検出し且つ検出した慣性に基づいて前記車体の位置を補正する慣性計測装置と、前記慣性計測装置のドリフト量が所定以上になったことを表示する表示装置と、前記慣性計測装置をリセットするリセットスイッチと、を備えている。
前記車体に設けられ且つ作業幅を変更可能な作業装置を備え、前記作業装置は、前記車体の位置と走行予定ラインとの偏差に基づいて、当該作業装置の位置を変更する。
前記車体に設けられ且つ作業幅を変更可能な作業装置を備え、前記作業装置は、前記車体の位置と走行予定ラインとの偏差に基づいて、当該作業装置の位置を変更する。
作業車両は、前記自動操舵の開始及び終了の指令を行う操舵切換スイッチを備え、前記自動操舵機構は、前記ステアリングハンドルを支持するステアリングポストを回転可能なステアリングモータと、前記ステアリングモータの回転を制御することで前記自動操舵を行う前記制御装置の電源ラインに接続され、前記電源ラインを遮断する遮断位置と前記電源ラインを通電する通電位置とに切り換え可能な遮断スイッチと、を有し、前記遮断スイッチは、前記操舵切換スイッチが前記自動操舵の開始の指令が行われた場合には前記通電位置に切り換わり、前記操舵切換スイッチが前記自動操舵の開始の指令から終了の指令を行った場合には前記遮断位置に切り換わる。
作業車両は、前記自動操舵の開始及び終了のいずれかを切り換える操舵切換スイッチを備え、前記制御装置は、前記操舵切換スイッチにより前記自動操舵の開始の切換が行われた場合に前記操舵装置による自動操舵を開始する。
作業車両は、前記車体の位置を検出可能な測位装置と、前記測位装置で検出された車体の位置を前記走行基準ラインの開始位置及び終了位置に設定する基準ライン設定スイッチと、を備えている。
作業車両は、前記車体の位置を検出可能な測位装置と、前記測位装置で検出された車体の位置を前記走行基準ラインの開始位置及び終了位置に設定する基準ライン設定スイッチと、を備えている。
上記の作業車両によれば、簡単に車体の操舵を行うことができる。例えば、ステアリングハンドルによる手動操舵によって車体の操舵を行うだけでなく、操舵スイッチによる押圧操作及びスライド操作のいずれかによっても車体を操舵することができる。また、位置検出装置で検出された車体の位置を用い操舵等を行う場合であっても位置検出装置による検出精度の影響を軽減することができる。
また、上記の作業車両によれば、操作部材の操作性を向上させることができる。
また、上記の作業車両によれば、自動操舵において簡単に位置の補正を行うことができる。
また、上記の作業車両によれば、自動操舵において簡単に位置の補正を行うことができる。
以下、本発明の実施の形態を図面に基づいて説明する。
図1~図20は、第1実施形態を示している。
図20は作業車両1の側面図であり、図20は作業車両1の平面図である。本実施形態の場合、作業車両1はトラクタである。但し、作業車両1は、トラクタに限定されず、コンバインや移植機等の農業機械(農業車両)であってもよいし、ローダ作業機等の建設機械(建設車両)等であってもよい。
図1~図20は、第1実施形態を示している。
図20は作業車両1の側面図であり、図20は作業車両1の平面図である。本実施形態の場合、作業車両1はトラクタである。但し、作業車両1は、トラクタに限定されず、コンバインや移植機等の農業機械(農業車両)であってもよいし、ローダ作業機等の建設機械(建設車両)等であってもよい。
以下、トラクタ(作業車両)1の運転席10に着座した運転者の前側(図20の矢印A1方向)を前方、運転者の後側(図20の矢印A2方向)を後方、運転者の左側(図20の矢印B1方向)を左方、運転者の右側(図20の矢印B2方向)を右方として説明する。また、作業車両1の前後方向に直交する方向である水平方向(図20の矢印B3方向)を車体幅方向として説明する。
図20に示すように、トラクタ1は、車体3と、原動機4と、変速装置5とを備えている。車体3は走行装置7を有していて走行可能である。走行装置7は、前輪7F及び後輪7Rを有する装置である。前輪7Fは、タイヤ型であってもクローラ型であってもよい。また、後輪7Rも、タイヤ型であってもクローラ型であってもよい。
原動機4は、ディーゼルエンジン、電動モータ等であって、この実施形態ではディーゼルエンジンで構成されている。変速装置5は、変速によって走行装置7の推進力を切換可能であると共に、走行装置7の前進、後進の切換が可能である。車体3には運転席10が設けられている。
原動機4は、ディーゼルエンジン、電動モータ等であって、この実施形態ではディーゼルエンジンで構成されている。変速装置5は、変速によって走行装置7の推進力を切換可能であると共に、走行装置7の前進、後進の切換が可能である。車体3には運転席10が設けられている。
また、車体3の後部には、3点リンク機構等で構成された連結部8が設けられている。連結部8には、作業装置を着脱可能である。作業装置を連結部8に連結することによって、車体3によって作業装置を牽引することができる。作業装置は、耕耘する耕耘装置、肥料を散布する肥料散布装置、農薬を散布する農薬散布装置、収穫を行う収穫装置、牧草等の刈取を行う刈取装置、牧草等の拡散を行う拡散装置、牧草等の集草を行う集草装置、牧草等の成形を行う成形装置等である。
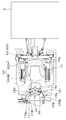
図1に示すように、変速装置5は、主軸(推進軸)5aと、主変速部5bと、副変速部5cと、シャトル部5dと、PTO動力伝達部5eと、前変速部5fと、を備えている。推進軸5aは、変速装置5のハウジングケース(ミッションケース)に回転自在に支持され、当該推進軸5aには、原動機(エンジン)4のクランク軸からの動力が伝達される。主変速部5bは、複数のギア及び当該ギアの接続を変更するシフタを有している。主変速部5bは、複数のギアの接続(噛合)をシフタで適宜変更することによって、推進軸5aから入力された回転を変更して出力する(変速する)。
副変速部5cは、主変速部5bと同様に、複数のギア及び当該ギアの接続を変更するシフタを有している。副変速部5cは、複数のギアの接続(噛合)をシフタで適宜変更することによって、主変速部5bから入力された回転を変更して出力する(変速する)。
シャトル部5dは、シャトル軸12と、前後進切換部13とを有している。シャトル軸12には、副変速部5cから出力された動力がギア等を介して伝達される。前後進切換部13は、例えば、油圧クラッチ等で構成され、油圧クラッチの入切によってシャトル軸12の回転方向、即ち、トラクタ1の前進及び後進を切り換える。シャトル軸12は、後輪デフ装置20Rに接続されている。後輪デフ装置20Rは、後輪7Rが取り付けられた後車軸21Rを回転自在に支持している。
シャトル部5dは、シャトル軸12と、前後進切換部13とを有している。シャトル軸12には、副変速部5cから出力された動力がギア等を介して伝達される。前後進切換部13は、例えば、油圧クラッチ等で構成され、油圧クラッチの入切によってシャトル軸12の回転方向、即ち、トラクタ1の前進及び後進を切り換える。シャトル軸12は、後輪デフ装置20Rに接続されている。後輪デフ装置20Rは、後輪7Rが取り付けられた後車軸21Rを回転自在に支持している。
PTO動力伝達部5eは、PTO推進軸14と、PTOクラッチ15とを有している。PTO推進軸14は、回転自在に支持され、推進軸5aからの動力が伝達可能である。PTO推進軸14は、ギア等を介してPTO軸16に接続されている。PTOクラッチ15は、例えば、油圧クラッチ等で構成され、油圧クラッチの入切によって、推進軸5aの動力をPTO推進軸14に伝達する状態と、推進軸5aの動力をPTO推進軸14に伝達しない状態とに切り換わる。
前変速部5fは、第1クラッチ17と、第2クラッチ18とを有している。第1クラッチ17及び第2クラッチは、推進軸5aからの動力が伝達可能であって、例えば、シャトル軸12の動力が、ギア及び伝動軸を介して伝達される。第1クラッチ17及び第2クラッチ18からの動力は、前伝動軸22を介して前車軸21Fに伝達可能である。具体的には、前伝動軸22は、前輪デフ装置20Fに接続され、前輪デフ装置20Fは、前輪7Fが取り付けられた前車軸21Fを回転自在に支持している。
第1クラッチ17及び第2クラッチ18は、油圧クラッチ等で構成されている。第1クラッチ17には油路が接続され、当該油路には油圧ポンプから吐出した作動油が供給される第1作動弁25に接続されている。第1クラッチ17は、第1作動弁25の開度によって接続状態と切断状態とに切り換わる。第2クラッチ18には油路が接続され、当該油路には第2作動弁26に接続されている。第2クラッチ18は、第2作動弁26の開度によって接続状態と切断状態とに切り換わる。第1作動弁25及び第2作動弁26は、例えば、電磁弁付き二位置切換弁であって、電磁弁のソレノイドを励磁又は消磁することにより、接続状態又は切断状態に切り換わる。
第1クラッチ17が切断状態で且つ第2クラッチ18が接続状態である場合、第2クラッチ18を通じてシャトル軸12の動力が前輪7Fに伝達される。これにより、前輪及び後輪が動力によって駆動する四輪駆動(4WD)で且つ前輪と後輪との回転速度が略同じとなる(4WD等速状態)。一方、第1クラッチ17が接続状態で且つ第2クラッチ18が切断状態である場合、四輪駆動になり且つ前輪の回転速度が後輪の回転速度に比べて速くなる(4WD増速状態)。また、第1クラッチ17及び第2クラッチ18が切断状態である場合、シャトル軸12の動力が前輪7Fに伝達されないため、後輪が動力によって駆動する二輪駆動(2WD)となる。
図1に示すように、トラクタ1は、制動装置を備えている。制動装置は、左制動装置46aと、右制動装置46bとを有している。左制動装置46a及び右制動装置46bは、ディスク型の制動装置であり、制動する制動状態と、制動を解除する解除状態に切換可能である。左制動装置46aは、後車軸21Rの左側に設けられ、右制動装置46bは、後車軸21Rの右側に設けられている。例えば、運転席10の近傍には、左ブレーキペダルと、右ブレーキペダルとが設けられている。トラクタ1を操作する運転者が左ブレーキペダルを操作する(踏み込む)ことによって、左ブレーキペダルに連結された左連結部材47aが制動方向へ動き、左制動装置46aを制動状態にすることができる。運転者が右ブレーキペダルを操作する(踏み込む)ことによって、右ブレーキペダルに連結された右連結部材47bが制動方向へ動き、右制動装置46bを制動状態にすることができる。
また、左連結部材47aには、作動油により作動する左油圧作動部48aが連結されている。左油圧作動部48aには、油路を介して第3作動弁(左制動弁)49aが接続されている。第3作動弁49aによって、左油圧作動部48aを作動させることにより、左連結部材47aを制動方向に移動させることができる。また、右連結部材47bには、作動油により作動する右油圧作動部48bが連結されている。右油圧作動部48bには、油路を介して第4作動弁(右制動弁)49bが接続されている。第4作動弁28bによって、右油圧作動部48bを作動させることにより、右連結部材47bを制動方向に移動させることができる。
以上のように、左制動装置46a及び右制動装置46bは、左ブレーキペダル及び右ブレーキペダルの操作だけでなく、左油圧作動部48a及び右油圧作動部48bの作動によっても、左の後輪7R及び右の後輪7Rのそれぞれを独立して制動状態にすることができる。
トラクタ1は、位置検出装置40(測位装置ともいう)を備えている。位置検出装置40は、D-GPS、GPS、GLONASS、北斗、ガリレオ、みちびき等の衛星測位システム(測位衛星)により、自己の位置(緯度、経度を含む測位情報)を検出する装置である。即ち、位置検出装置40は、測位衛星から送信された受信信号(測位衛星の位置、送信時刻、補正情報等)を受信し、受信信号(衛星信号ともいう)に基づいて位置(例えば、緯度、経度)を検出する。位置検出装置40は、受信装置41と、慣性計測装置(IMU:Inertial Measurement Unit)42とを有している。受信装置41は、アンテナ等を有していて測位衛星から送信された受信信号を受信する装置であり、慣性計測装置42とは別に車体3に取付けられている。この実施形態では、受信装置41は、車体3に設けられたロプスに取付けられている。なお、受信装置41の取付箇所は、実施形態に限定されない。
トラクタ1は、位置検出装置40(測位装置ともいう)を備えている。位置検出装置40は、D-GPS、GPS、GLONASS、北斗、ガリレオ、みちびき等の衛星測位システム(測位衛星)により、自己の位置(緯度、経度を含む測位情報)を検出する装置である。即ち、位置検出装置40は、測位衛星から送信された受信信号(測位衛星の位置、送信時刻、補正情報等)を受信し、受信信号(衛星信号ともいう)に基づいて位置(例えば、緯度、経度)を検出する。位置検出装置40は、受信装置41と、慣性計測装置(IMU:Inertial Measurement Unit)42とを有している。受信装置41は、アンテナ等を有していて測位衛星から送信された受信信号を受信する装置であり、慣性計測装置42とは別に車体3に取付けられている。この実施形態では、受信装置41は、車体3に設けられたロプスに取付けられている。なお、受信装置41の取付箇所は、実施形態に限定されない。
慣性計測装置42は、加速度を検出する加速度センサ、角速度を検出するジャイロセンサ等を有している。車体3、例えば、運転席10の下方に設けられ、慣性計測装置42によって、車体3のロール角、ピッチ角、ヨー角等を検出することができる。
図1に示すように、トラクタ1は、操舵装置11を備えている。操舵装置11は、運転者の操作によって車体3の操舵を行う手動操舵と、運転者の操作によらずに自動的に車体3の操舵を行う自動操舵とを行うことが可能な装置である。
図1に示すように、トラクタ1は、操舵装置11を備えている。操舵装置11は、運転者の操作によって車体3の操舵を行う手動操舵と、運転者の操作によらずに自動的に車体3の操舵を行う自動操舵とを行うことが可能な装置である。
操舵装置11は、ステアリングハンドル(ステアリングホイール)30と、ステアリングハンドル30を回転可能に支持するステアリングシャフト(回転軸)31とを有している。また、操舵装置11は、補助機構(パワーステアリング装置)32を有している。補助機構32は、油圧等によってステアリングシャフト31(ステアリングハンドル30)の回転を補助する。補助機構32は、油圧ポンプ33と、油圧ポンプ33から吐出した作動油が供給される制御弁34と、制御弁34により作動するステアリングシリンダ35とを含んでいる。制御弁34は、例えば、スプール等の移動によって切り換え可能な3位置切換弁であり、ステアリングシャフト31の操舵方向(回転方向)に対応して切り換わる。ステアリングシリンダ35は、前輪7Fの向きを変えるアーム(ナックルアーム)36に接続されている。
したがって、運転者がステアリングハンドル30を把持して一方向又は他方向に操作すれば、当該ステアリングハンドル30の回転方向に対応して制御弁34の切換位置及び開度が切り換わり、当該制御弁34の切換位置及び開度に応じてステアリングシリンダ35が左又は右に伸縮することによって、前輪7Fの操舵方向を変更することができる。つまり、車体3は、ステアリングハンドル30の手動操舵によって、進行方向を左又は右に変更することができる。
次に、自動操舵について説明する。
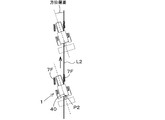
図2に示すように、自動操舵を行うに際しては、まず、自動操舵を行う前に走行基準ラインL1を設定する。走行基準ラインL1の設定後に、当該走行基準ラインL1に平行な走行予定ラインL2の設定を行うことによって自動操舵を行うことができる。自動操舵では、位置検出装置40によって測定された車体位置と走行予定ラインをL2とが一致するように、トラクタ1(車体3)の進行方向の操舵を自動的に行う。
図2に示すように、自動操舵を行うに際しては、まず、自動操舵を行う前に走行基準ラインL1を設定する。走行基準ラインL1の設定後に、当該走行基準ラインL1に平行な走行予定ラインL2の設定を行うことによって自動操舵を行うことができる。自動操舵では、位置検出装置40によって測定された車体位置と走行予定ラインをL2とが一致するように、トラクタ1(車体3)の進行方向の操舵を自動的に行う。
具体的には、自動操舵を行う前にトラクタ1(車体3)を圃場内の所定位置に移動させ(S1)、所定位置にて運転者がトラクタ1に設けられた操舵切換スイッチ52の操作を行うと(S2)、位置検出装置40によって測定された車体位置が走行基準ラインL1の始点P10に設定される(S3)。また、トラクタ1(車体3)を走行基準ラインL1の始点P10から移動させ(S4)、所定の位置で運転者が操舵切換スイッチ52の操作を行うと(S5)、位置検出装置40によって測定された車体位置が走行基準ラインL1の終点P11に設定される(S6)。したがって、始点P10と終点P11とを結ぶ直線が走行基準ラインL1として設定される。
走行基準ラインL1の設定後(S6後)、例えば、トラクタ1(車体3)を、走行基準ラインL1を設定した場所とは異なる場所に移動させ(S7)、運転者が操舵切換スイッチ52の操作を行うと(S8)、走行基準ラインL1に平行な直線である走行予定ラインL2が設定される(S9)。走行予定ラインL2の設定後、自動操舵が開始され、トラクタ1(車体3)の進行方向が走行予定ラインL2に沿うように変更される。例えば、現在の車体位置が走行予定ラインL2に対して左側にある場合には、前輪7Fが右に操舵され、現在の車体位置が走行予定ラインL2に対して右側にある場合には、前輪7Fが左に操舵される。なお、自動操舵中において、トラクタ1(車体3)の走行速度(車速)は、運転者が手動で当該トラクタ1に設けられたアクセル部材(アクセルペダル、アクセルレバー)の操作量を変更したり、変速装置の変速段を変更することにより変更することができる。
また、自動操舵の開始後、運転者が任意の箇所で操舵切換スイッチ52の操作を行うと、自動操舵を終了することができる。即ち、走行予定ラインL2の終点は、操舵切換スイッチ52の操作による自動操舵の終了によって設定することができる。つまり、走行予定ラインL2の始点から終点までの長さは、走行基準ラインL1よりも長く設定したり、短く設定することができる。言い換えれば、走行予定ラインL2は、走行基準ラインL1の長さとは関連付けされておらず、走行予定ラインL2によって、走行基準ラインL1の長さよりも長い距離を自動操舵しながら走行させることができる。
図1に示すように、操舵装置11は、自動操舵機構37を有している。自動操舵機構37は、車体3の自動操舵を行う機構であって、位置検出装置40で検出された車体3の位置(車体位置)に基づいて車体3を自動操舵する。自動操舵機構37は、ステアリングモータ38とギア機構39とを備えている。ステアリングモータ38は、車体位置に基づいて、回転方向、回転速度、回転角度等が制御可能なモータである。ギア機構39は、ステアリングシャフト31に設けられ且つ当該ステアリングシャフト31と供回りするギアと、ステアリングモータ38の回転軸に設けられ且つ当該回転軸と供回りするギアとを含んでいる。ステアリングモータ38の回転軸が回転すると、ギア機構39を介して、ステアリングシャフト31が自動的に回転(回動)し、車体位置が走行予定ラインL2に一致するように、前輪7Fの操舵方向を変更することができる。
図1、図20に示すように、トラクタ1は、表示装置45を備えている。表示装置45は、トラクタ1に関する様々な情報を表示可能な装置であって、少なくともトラクタ1の運転情報を表示可能である。表示装置45は、運転席10の前方に設けられている。
図1に示すように、トラクタ1は、設定スイッチ51を備えている。設定スイッチ51は、少なくとも自動操舵の開始前の設定を行う設定モードに切り換えるスイッチである。設定モードは、自動操舵を開始する前に当該自動操舵に関する様々な設定を行うモードであり、例えば、走行基準ラインL1の始点、終点の設定等を行うモードである。
図1に示すように、トラクタ1は、設定スイッチ51を備えている。設定スイッチ51は、少なくとも自動操舵の開始前の設定を行う設定モードに切り換えるスイッチである。設定モードは、自動操舵を開始する前に当該自動操舵に関する様々な設定を行うモードであり、例えば、走行基準ラインL1の始点、終点の設定等を行うモードである。
設定スイッチ51は、ON又はOFFに切換可能であり、ONである場合には設定モードが有効である信号を出力し、OFFである場合には設定モードが無効である信号を出力する。また、設定スイッチ51は、ONである場合には設定モードが有効である信号を表示装置45に出力し、OFFである場合には設定モードが無効である信号を表示装置45に出力する。
トラクタ1は、操舵切換スイッチ52を備えている。操舵切換スイッチ52は、自動操舵の開始又は終了を切り換えるスイッチである。具体的には、操舵切換スイッチ52は、中立位置から上、下、前、後に切換可能であり、設定モードが有効である状態で中立位置から下方に切り換えられた場合には自動操舵の開始を出力し、設定モードが有効である状態で中立位置から上方に切り換えられた場合には自動操舵の終了を出力する。また、操舵切換スイッチ52は、設定モードが有効である状態で中立位置から後に切り換えられた場合には、現在の車体位置を走行基準ラインL1の始点P10に設定することを出力し、操舵切換スイッチ52は、設定モードが有効である状態で中立位置から前に切り換えられた場合には、現在の車体位置を走行基準ラインL1の終点P11に設定することを出力する。
即ち、操舵切換スイッチ52は、走行基準ラインL1の開始位置(始点P10)及び終了位置(終点P11)を設定する基準ライン設定スイッチを兼用している。なお、操舵切換スイッチ52は、自動操舵の開始又は終了を切り換える操舵切換スイッチ52と、基準ライン設定スイッチとは別体に構成してもよい。
トラクタ1は、補正スイッチ53を備えている。補正スイッチ53は、位置検出装置40によって測定された車体位置(緯度、経度)を補正するスイッチである。即ち、補正スイッチ53は、受信信号(測位衛星の位置、送信時刻、補正情報等)と、慣性計測装置42で計測した測定情報(加速度、角速度)とで演算された車体位置(演算車体位置という)を補正するスイッチである。
トラクタ1は、補正スイッチ53を備えている。補正スイッチ53は、位置検出装置40によって測定された車体位置(緯度、経度)を補正するスイッチである。即ち、補正スイッチ53は、受信信号(測位衛星の位置、送信時刻、補正情報等)と、慣性計測装置42で計測した測定情報(加速度、角速度)とで演算された車体位置(演算車体位置という)を補正するスイッチである。
補正スイッチ53は、押圧可能なプッシュスイッチ又はスライド可能なスライドスイッチで構成されている。以下、補正スイッチ53がプッシュスイッチ、スライドスイッチのそれぞれである場合について説明する。
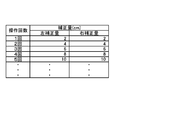
補正スイッチ53がプッシュスイッチである場合、当該プッシュスイッチの操作回数に基づいて、補正量が設定される。補正量は、補正量=操作回数×1回の操作回数当たりの補正量(単位当たりの補正量)により決定される。例えば、図3Aに示すように、プッシュスイッチを操作する毎に、補正量が数センチ或いは数十センチずつ増加する。プッシュスイッチの操作回数は、第1制御装置60Aに入力され、当該第1制御装置60Aが操作回数に基づいて補正量を設定(演算)する。なお、第1制御装置60Aは、プッシュスイッチの所定の操作、即ち、1回の操作回数当たりの補正量を変更可能である。
補正スイッチ53がプッシュスイッチである場合、当該プッシュスイッチの操作回数に基づいて、補正量が設定される。補正量は、補正量=操作回数×1回の操作回数当たりの補正量(単位当たりの補正量)により決定される。例えば、図3Aに示すように、プッシュスイッチを操作する毎に、補正量が数センチ或いは数十センチずつ増加する。プッシュスイッチの操作回数は、第1制御装置60Aに入力され、当該第1制御装置60Aが操作回数に基づいて補正量を設定(演算)する。なお、第1制御装置60Aは、プッシュスイッチの所定の操作、即ち、1回の操作回数当たりの補正量を変更可能である。
また、補正スイッチ53がスライドスイッチである場合、当該スライドスイッチの操作量(変位量)に基づいて、補正量が設定される。例えば、補正量は、補正量=所定位置からの変位量により決定される。例えば、図3Bに示すように、スライドスイッチの変位量が5mm増加する毎に、補正量が数センチ或いは数十センチずつ増加する。スライドスイッチの操作量(変位量)は、第1制御装置60Aに入力され、当該第1制御装置60Aが変位量に基づいて補正量を設定(演算)する。なお、補正スイッチ53がスライドスイッチあっても、プッシュスイッチと同様に補正量を変更することができる。また、上述した補正量の増加方法及び増加の割合は、上述した数値に限定されない。
詳しくは、図4A及び図4Bに示すように、補正スイッチ53は、第1補正部53Aと、第2補正部53Bとを有している。第1補正部53Aは、車体3の幅方向における一方側、即ち、左側に対応する車体位置の補正を指令する部分である。第2補正部53Bは、車体3の幅方向における他方側、即ち、右側に対応する車体位置の補正を指令する部分である。
図4Aに示すように、補正スイッチ53がプッシュスイッチである場合、第1補正部53A及び第2補正部53Bは、操作を行う毎に自動的に復帰するON又はOFFのスイッチである。第1補正部53Aを構成するスイッチと第2補正部53Bを構成するスイッチとは一体化されている。なお、第1補正部53Aを構成するスイッチと第2補正部53Bを構成するスイッチとは互いに離間して配置されていてもよい。図3Aに示すように、第1補正部53Aを押圧する毎に、車体3の左側に対応する補正量(左補正量)が増加する。また、第2補正部53Bを押圧する毎に、車体3の右側に対応する補正量(右補正量)が増加する。
図4Bに示すように、補正スイッチ53がスライドスイッチである場合、第1補正部53A及び第2補正部53Bは、長孔の長手方向に沿って左又は右に移動する摘み部55を含んでいる。補正スイッチ53がスライドスイッチである場合、第1補正部53Aと第2補正部53Bとは互いに幅方向に離間して配置されている。図3Bに示すように、摘み部55を予め定められた基準位置から徐々に左側へ変位させると、変位量に応じて左補正量が増加する。また、摘み部55を予め定められた基準位置から徐々に右側へ変位させると、変位量に応じて右補正量が増加する。なお、図4Bに示すように、スライドスイッチである場合、第1補正部53Aと第2補正部53Bとを一体化に形成し、摘み部55の基準位置を中央部に設定し、基準位置から左側に移動した場合に左補正量が設定され、摘み部55を中間位置から右側に移動した場合に右補正量が設定される構成としてもよい。
次に、補正スイッチ53による補正量(左補正量、右補正量)と、走行予定ラインL2と、トラクタ1(車体3)の挙動(走行軌跡)との関係について説明する。
図5Aは、自動操舵中で直進中に演算車体位置W1が右にずれた場合の状態を示している。図5Aに示すように、自動操舵が開始された状態において、実際のトラクタ1(車体3)の位置(実際位置W2)と演算車体位置W1とが一致し、且つ、実際位置W2と走行予定ラインL2とが一致している場合、トラクタ1は走行予定ラインL2に沿って走行する。即ち、位置検出装置40の測位に誤差がなく、位置検出装置40で検出した車体位置(演算車体位置W1)が実際位置W2と同じである区間P1では、トラクタ1は走行予定ラインL2に沿って走行する。なお、位置検出装置40の測位に誤差がなく補正も行われていない場合は、演算車体位置W1と、補正量で補正した補正後の車体位置(補正車体位置)W3とは同じ値である。補正車体位置W3は、補正車体位置W3=演算車体位置W1-補正量である。
図5Aは、自動操舵中で直進中に演算車体位置W1が右にずれた場合の状態を示している。図5Aに示すように、自動操舵が開始された状態において、実際のトラクタ1(車体3)の位置(実際位置W2)と演算車体位置W1とが一致し、且つ、実際位置W2と走行予定ラインL2とが一致している場合、トラクタ1は走行予定ラインL2に沿って走行する。即ち、位置検出装置40の測位に誤差がなく、位置検出装置40で検出した車体位置(演算車体位置W1)が実際位置W2と同じである区間P1では、トラクタ1は走行予定ラインL2に沿って走行する。なお、位置検出装置40の測位に誤差がなく補正も行われていない場合は、演算車体位置W1と、補正量で補正した補正後の車体位置(補正車体位置)W3とは同じ値である。補正車体位置W3は、補正車体位置W3=演算車体位置W1-補正量である。
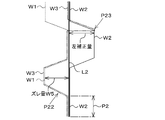
ここで、位置P20の付近において、実際位置W2が走行予定ラインL2に対してズレていないのにも関わらず、様々な影響により、位置検出装置40の測位に誤差が生じ、位置検出装置40で検出した車体位置が走行予定ラインL2(実際位置W2)に対して右側にズレてしまい、ズレ量W4が維持されているとすると、トラクタ1は、演算車体位置W1と走行予定ラインL2とにズレが生じたと判断し、演算車体位置W1と走行予定ラインL2とのズレ量W4を解消するように、当該トラクタ1を左に操舵する。そうすると、トラクタ1の実際位置W2は左の操舵によって走行予定ラインL2にシフトする。その後、運転者がトラクタ1が走行予定ラインL2からズレていることに気づき、位置P21にて第2補正部53Bを操舵して右補正量を零から増加させたとする。演算車体位置W1に対して右補正量が加えられ、補正後の車体位置(補正車体位置)W3は、実際位置W2と略同じにすることができる。つまり、第2補正部53Bによって右補正量を設定することにより、位置P20の付近において発生したズレ量W4を解消する方向に、位置検出装置40の車体位置を補正することができる。なお、図5Aの位置P21に示すように、車体位置の補正後、トラクタ1の実際位置W2が走行予定ラインL2から左側に離れている場合は、トラクタ1は右に操舵され、当該トラクタ1の実際位置W2を、走行予定ラインL2に一致させることができる。
図5Bは、自動操舵中で直進中に演算車体位置W1が左にずれた場合の状態を示している。図5Bに示すように、自動操舵が開始された状態において、実際位置W2と演算車体位置W1とが一致し、且つ、実際位置W2と走行予定ラインL2とが一致している場合、図5Aと同様に、トラクタ1は走行予定ラインL2に沿って走行する。即ち、図5Aと同様に、位置検出装置40の測位に誤差がない区間P2では、トラクタ1は走行予定ラインL2に沿って走行する。また、図5Aと同様に、演算車体位置W1と補正車体位置W3とは同じ値である。
ここで、位置P22において、様々な影響により、位置検出装置40の測位に誤差が生じ、位置検出装置40で検出した車体位置W1が実際位置W2に対して左側にズレてしまい、ズレ量W5が維持されているとすると、トラクタ1は、演算車体位置W1と走行予定ラインL2とのズレ量W5を解消するように、当該トラクタ1を右に操舵する。その後、運転者がトラクタ1が走行予定ラインL2からズレていることに気づき、運転者が位置P23にて第1補正部53Aを操舵して左補正量を零から増加させたとする。そうすると、演算車体位置W1に対して左補正量が加えられ、補正後の車体位置(補正車体位置)W3は、実際位置W2と略同じにすることができる。つまり、第1補正部53Aによって左補正量を設定することにより、位置P22の付近において発生したズレ量W5を解消する方向に、位置検出装置40の車体位置を補正することができる。なお、図5Bの位置P23に示すように、車体位置の補正後、トラクタ1の実際位置W2が走行予定ラインL2から右側に離れている場合は、トラクタ1は左に操舵され、当該トラクタ1の実際位置W2を、走行予定ラインL2に一致させることができる。
つまり、補正スイッチ53を操作することによって、ステアリングハンドル30とは別に操舵を行うことができる。即ち、補正スイッチ53は、車体3を操舵する操舵部材でもある。
次に、設定スイッチ51、補正スイッチ53、画面切換スイッチ54について説明する。
次に、設定スイッチ51、補正スイッチ53、画面切換スイッチ54について説明する。
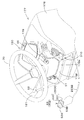
図18に示すように、運転席10の前方には、操作台150が設けられている。操作台150は、少なくとも操作を行う操作部材を支持する台であって、操作部材の1つである補正スイッチ53が取り付けられている。また、操作台150には、設定スイッチ51、操舵切換スイッチ52が取り付けられている。
操作台150は、ステアリングハンドル30、即ち、当該ステアリングハンドル30を回転可能に支持するステアリングシャフト(回転軸)31を支持している。ステアリングシャフト31の外周は、ステアリングポスト180により覆われている。ステアリングポスト180の外周は、カバー177により覆われている。即ち、操作台150は、ステアリングシャフト(回転軸)31を覆うカバー177を含んでいる。カバー177は、運転席10の前方に設けられている。カバー177は、パネルカバー178とコラムカバー179とを含んでいる。
操作台150は、ステアリングハンドル30、即ち、当該ステアリングハンドル30を回転可能に支持するステアリングシャフト(回転軸)31を支持している。ステアリングシャフト31の外周は、ステアリングポスト180により覆われている。ステアリングポスト180の外周は、カバー177により覆われている。即ち、操作台150は、ステアリングシャフト(回転軸)31を覆うカバー177を含んでいる。カバー177は、運転席10の前方に設けられている。カバー177は、パネルカバー178とコラムカバー179とを含んでいる。
パネルカバー178は、表示装置45を支持している。パネルカバー178の上板部178aには、表示装置45を支持する支持部178eが設けられている。支持部178eは、ステアリングシャフト31の前方且つステアリングハンドル30の下方において表示装置45を支持している。また、上板部178aは、設定スイッチ51、補正スイッチ53、画面切換スイッチ54が取り付けられた取付面178fを有している。取付面178fは、支持部178eの後方であって且つステアリングハンドル30の下方に設けられている。支持部178eと取付面178fとは連続しており、支持部178eは上板部178aの前部に位置し、取付面178fは上板部178aの後部に位置している。設定スイッチ51、補正スイッチ53、画面切換スイッチ54は、取付面178fに取り付けられている。これにより、設定スイッチ51、補正スイッチ53、画面切換スイッチ54は、ステアリングシャフト31の周囲に配置されている。
パネルカバー178の左板部178bからはシャトルレバー181が突出している。シャトルレバー181は、車体3の走行方向を切り換える操作を行う部材である。より詳しく説明すると、シャトルレバー181を前方に操作(揺動)することにより、前後進切換部13が走行装置7へ前進動力を出力する状態となり、車体3の走行方向が前進方向に切り換えられる。また、シャトルレバー181を後方に操作(揺動)することにより、前後進切換部13が走行装置7へ後進動力を出力する状態となり、車体3の走行方向が後進方向に切り換えられる。シャトルレバー181が中立位置にあるときには、走行装置7へ動力が出力されない。
コラムカバー179は、ステアリングハンドル30の下方に配置されており、ステアリングシャフト31の上部の周囲を覆っている。コラムカバー179は、略四角筒状に形成されており、パネルカバー178の取付面178fから上方に突出している。つまり、取付面178fは、コラムカバー179の周囲に設けられている。そのため、取付面178fに取り付けられた設定スイッチ51、補正スイッチ53、画面切換スイッチ54は、コラムカバー179の周囲に配置されている。
次に、設定スイッチ51、操舵切換スイッチ52、補正スイッチ53、画面切換スイッチ54のそれぞれの配置について詳しく説明する。図18に示すように、設定スイッチ51、操舵切換スイッチ52、補正スイッチ53、画面切換スイッチ54は、ステアリングシャフト31の周囲に配置されている。
設定スイッチ51は、ステアリングシャフト31の一側方(左方)に配置されている。操舵切換スイッチ52は、ステアリングシャフト31の一側方(左方)に配置されている。本実施形態の場合、操舵切換スイッチ52は、揺動可能なレバーから構成されている。操舵切換スイッチ52は、ステアリングシャフト31側に設けられた基端部を支点として揺動可能である。操舵切換スイッチ52の基端部は、コラムカバー179の内部に設けられている。操舵切換スイッチ52は、コラムカバー179の一側方(左方)に突出している。
設定スイッチ51は、ステアリングシャフト31の一側方(左方)に配置されている。操舵切換スイッチ52は、ステアリングシャフト31の一側方(左方)に配置されている。本実施形態の場合、操舵切換スイッチ52は、揺動可能なレバーから構成されている。操舵切換スイッチ52は、ステアリングシャフト31側に設けられた基端部を支点として揺動可能である。操舵切換スイッチ52の基端部は、コラムカバー179の内部に設けられている。操舵切換スイッチ52は、コラムカバー179の一側方(左方)に突出している。
補正スイッチ53は、ステアリングシャフト31の他側方(右方)に配置されている。より詳しくは、補正スイッチ53は、ステアリングシャフト31の右方且つ後方(斜め右後方)に配置されている。補正スイッチ53は、コラムカバー179との位置関係では、コラムカバー179の右方且つ後方(斜め右後方)に配置されている。補正スイッチ53は、パネルカバー178の取付面178fとの位置関係では、取付面178fの右後部に配置されている。補正スイッチ53が傾斜した取付面178fの後部に配置されていることによって、補正スイッチ53とステアリングハンドル30との距離を長く確保することができる。これにより、意図しない補正スイッチ53の操作やステアリングハンドル30の操舵をより確実に防止できる。
画面切換スイッチ54は、ステアリングシャフト31の他側方(右方)に配置されている。より詳しくは、画面切換スイッチ54は、ステアリングシャフト31の右方且つ前方(斜め右前方)に配置されている。画面切換スイッチ54は、コラムカバー179との位置関係では、コラムカバー179の右方且つ前方(斜め右前方)に配置されている。画面切換スイッチ54は、パネルカバー178の取付面178fとの位置関係では、取付面178fの右前部に配置されている。また、画面切換スイッチ54は、補正スイッチ53の前方に配置されている。
上述の通り、設定スイッチ51、操舵切換スイッチ52、補正スイッチ53、画面切換スイッチ54は、ステアリングシャフト31の周囲に配置されている。言い換えれば、設定スイッチ51、操舵切換スイッチ52、補正スイッチ53、画面切換スイッチ54は、ステアリングシャフト31の周囲に集約して存在している。そのため、運転者は、各スイッチの位置を一目瞭然で把握することができる。加えて、運転者は、運転席10に着座したままの状態で姿勢を変えずに各スイッチを操作することができる。そのため、操作性が良好となり、且つ誤操作を防止することができる。また、各スイッチから配策されるハーネス(配線)を短くすることができる。
尚、上述したスイッチの配置について、左と右とを入れ替えて配置してもよい。つまり、一側方が左方であって他側方が右方であってもよいし、一側方が右方であって他側方が左方であってもよい。具体的には、例えば、設定スイッチ51及び操舵切換スイッチ52をステアリングシャフト31の右方に配置し、補正スイッチ53をステアリングシャフト31の左方に配置してもよい。
図1に示すように、トラクタ1は、複数の制御装置60を備えている。複数の制御装置60は、トラクタ1における走行系の制御、作業系の制御、車体位置の演算等を行う装置である。複数の制御装置60は、第1制御装置60A、第2制御装置60B及び第3制御装置60Cである。
第1制御装置60Aは、受信装置41が受信した受信信号(受信情報)と、慣性計測装置42が測定した測定情報(加速度、角速度等)を受信し、受信情報及び測定情報に基づいて車体位置を求める。例えば、第1制御装置60Aは、補正スイッチ53による補正量が零である場合、即ち、補正スイッチ53による車体位置の補正が指令されていない場合、受信情報と測定情報とで演算された演算車体位置W1に対して補正を行わず、演算車体位置W1を自動操舵時に用いる車体位置に決定する。一方、第1制御装置60Aは、補正スイッチ53による車体位置の補正が指令されている場合、補正スイッチ53の操作回数及び補正スイッチ53の操作量(変位量)のいずれかに基づいて車体位置の補正量を設定し、演算車体位置W1を補正量で補正した補正車体位置W3を自動操舵時に用いる車体位置に決定する。
第1制御装置60Aは、受信装置41が受信した受信信号(受信情報)と、慣性計測装置42が測定した測定情報(加速度、角速度等)を受信し、受信情報及び測定情報に基づいて車体位置を求める。例えば、第1制御装置60Aは、補正スイッチ53による補正量が零である場合、即ち、補正スイッチ53による車体位置の補正が指令されていない場合、受信情報と測定情報とで演算された演算車体位置W1に対して補正を行わず、演算車体位置W1を自動操舵時に用いる車体位置に決定する。一方、第1制御装置60Aは、補正スイッチ53による車体位置の補正が指令されている場合、補正スイッチ53の操作回数及び補正スイッチ53の操作量(変位量)のいずれかに基づいて車体位置の補正量を設定し、演算車体位置W1を補正量で補正した補正車体位置W3を自動操舵時に用いる車体位置に決定する。
第1制御装置60Aは、車体位置(演算車体位置W1、補正車体位置W3)及び走行予定ラインL2に基づいて制御信号を設定し、制御信号を第2制御装置60Bに出力する。
第2制御装置60Bは、自動操舵制御部200を有している。自動操舵制御部200は、第2制御装置60Bに設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。
第2制御装置60Bは、自動操舵制御部200を有している。自動操舵制御部200は、第2制御装置60Bに設けられた電気・電子回路、CPU等に格納されたプログラム等から構成されている。
自動操舵制御部200(第2制御装置60B)は、第1制御装置60Aから出力された制御信号に基づいて車体3が走行予定ラインL2に沿って走行するように自動操舵機構37のステアリングモータ38を制御する。
図17に示すように、車体位置と走行予定ラインL2との偏差が閾値未満である場合、自動操舵制御部200(第2制御装置60B)は、ステアリングモータ38の回転軸の回転角を維持する。車体位置と走行予定ラインL2との偏差(位置偏差)が閾値以上であって、トラクタ1が走行予定ラインL2に対して左側に位置している場合は、自動操舵制御部200(第2制御装置60B)は、トラクタ1の操舵方向が右方向となるようにステアリングモータ38の回転軸を回転する。即ち、自動操舵制御部200は、位置偏差が零となるように、右方向の操舵角を設定する。
図17に示すように、車体位置と走行予定ラインL2との偏差が閾値未満である場合、自動操舵制御部200(第2制御装置60B)は、ステアリングモータ38の回転軸の回転角を維持する。車体位置と走行予定ラインL2との偏差(位置偏差)が閾値以上であって、トラクタ1が走行予定ラインL2に対して左側に位置している場合は、自動操舵制御部200(第2制御装置60B)は、トラクタ1の操舵方向が右方向となるようにステアリングモータ38の回転軸を回転する。即ち、自動操舵制御部200は、位置偏差が零となるように、右方向の操舵角を設定する。
車体位置と走行予定ラインL2との偏差が閾値以上であって、トラクタ1が走行予定ラインL2に対して右側に位置している場合は、第2制御装置60Bは、トラクタ1の操舵方向が左方向となるようにステアリングモータ38の回転軸を回転する。即ち、自動操舵制御部200は、位置偏差が零となるように、左方向の操舵角を設定する。
なお、上述した実施形態では、車体位置と走行予定ラインL2との偏差に基づいて操舵装置11の操舵角を変更していたが、走行予定ラインL2の方位とトラクタ1(車体3)の進行方向(走行方向)の方位(車体方位)F1とが異なる場合、即ち、走行予定ラインL2に対する車体方位F1の角度θが閾値以上である場合、自動操舵制御部200は、(第2制御装置60B)は、角度θが零(車体方位F1が走行予定ラインL2の方位に一致)するように操舵角を設定してもよい。また、自動操舵制御部200は、(第2制御装置60B)は、偏差(位置偏差)に基づいて求めた操舵角と、方位(方位偏差θ)に基づいて求めた操舵角とに基づいて、自動操舵における最終の操舵角を設定してもよい。上述した実施形態における自動操舵における操舵角の設定は一例であり、限定されない。
なお、上述した実施形態では、車体位置と走行予定ラインL2との偏差に基づいて操舵装置11の操舵角を変更していたが、走行予定ラインL2の方位とトラクタ1(車体3)の進行方向(走行方向)の方位(車体方位)F1とが異なる場合、即ち、走行予定ラインL2に対する車体方位F1の角度θが閾値以上である場合、自動操舵制御部200は、(第2制御装置60B)は、角度θが零(車体方位F1が走行予定ラインL2の方位に一致)するように操舵角を設定してもよい。また、自動操舵制御部200は、(第2制御装置60B)は、偏差(位置偏差)に基づいて求めた操舵角と、方位(方位偏差θ)に基づいて求めた操舵角とに基づいて、自動操舵における最終の操舵角を設定してもよい。上述した実施形態における自動操舵における操舵角の設定は一例であり、限定されない。
第3制御装置60Cは、運転席10の周囲に設けられた操作部材の操作に応じて、連結部8を昇降させる。なお、第1制御装置60A、第2制御装置60B及び第3制御装置60Cは一体化されていてもよい。また、上述した走行系の制御、作業系の制御、車体位置の演算は限定されない。
以上のように、制御装置60によって、トラクタ1(車体3)を自動操舵することができる。
以上のように、制御装置60によって、トラクタ1(車体3)を自動操舵することができる。
さて、操舵切換スイッチ52において、自動操舵の開始に切り換えた場合は、第2制御装置60Bへの通電を行い、自動操舵の終了に切り換えられた場合は、第2制御装置60Bへの通電を行わないようにしてもよい。
車体3の走行に関する設定は、表示装置45により行うことができる。
以下、表示装置45の詳細について説明する。
車体3の走行に関する設定は、表示装置45により行うことができる。
以下、表示装置45の詳細について説明する。
図1に示すように、表示装置45は、検出装置47が検出した様々な情報を、車載ネットワーク等を介して取得可能である。検出装置47は、アクセルペダルセンサ、シフトレバー検出センサ、クランク位置センサ、燃料センサ、水温センサ、原動機回転センサ、操舵角センサ、油温センサ、車軸回転センサ等である。例えば、表示装置45は、運転情報として、燃料センサが検出した燃料残量、水温センサが検出した水温値、原動機回転センサが検出した原動機回転数等を表示することができる。
また、表示装置45は、様々なスイッチの情報、例えば、設定スイッチ51、操舵切換スイッチ52、補正スイッチ53の情報を取得可能である。表示装置45は、設定スイッチ51のON又はOFFの情報、操舵切換スイッチ52における自動操舵の開始、終了の情報、操舵切換スイッチ52における走行基準ラインL1の始点P10及び終点P11の指令の情報を取得することができる。
図18に示すように、表示装置45は、様々な情報を表示する表示部46を備えている。表示部46は、警告等を表示する固定表示部46Aと、表示する情報を可変することが可能な可変表示部46Bとを含んでいる。固定表示部46Aは、警告等の図形が示されたパネルと、パネルの図形に対して光源を照射するLED等の照射部とを有している。また、可変表示部46Bは、有機EL、液晶等のパネルで構成され、トラクタ1の運転(走行)等に関する様々な情報を表示する。
図6Aは、トラクタ1の運転画面M1を示している。運転画面M1は、設定スイッチ51がOFFである場合、即ち、設定モードが無効である場合において、可変表示部46Bに表示される画面である。
表示装置45、即ち、運転画面M1は、運転情報を示す運転表示部61を有している。運転表示部61は、運転情報として原動機4の回転数(原動機回転数)を表示する回転表示部62を含んでいる。回転表示部62は、レベル表示部63を含んでいる。レベル表示部63は、原動機回転数を段階的に表示する部分である。例えば、レベル表示部63は、目盛部65と、指標部80とを含んでいる。目盛部65は、例えば、第1ライン65Aと、第1ライン65Aに沿って所定の間隔で割り当てられた複数の第2ライン65Bとを有している。また、目盛部65は、第1ライン65Aと所定の間隔で離間した第3ライン65Cとを有している。第1ライン65A及び第3ライン65Cは、例えば、半円形状に形成されていて、一端側(例えば、左側)が最小値とされ、他端側(例えば、右側)が最大値とされている。
表示装置45、即ち、運転画面M1は、運転情報を示す運転表示部61を有している。運転表示部61は、運転情報として原動機4の回転数(原動機回転数)を表示する回転表示部62を含んでいる。回転表示部62は、レベル表示部63を含んでいる。レベル表示部63は、原動機回転数を段階的に表示する部分である。例えば、レベル表示部63は、目盛部65と、指標部80とを含んでいる。目盛部65は、例えば、第1ライン65Aと、第1ライン65Aに沿って所定の間隔で割り当てられた複数の第2ライン65Bとを有している。また、目盛部65は、第1ライン65Aと所定の間隔で離間した第3ライン65Cとを有している。第1ライン65A及び第3ライン65Cは、例えば、半円形状に形成されていて、一端側(例えば、左側)が最小値とされ、他端側(例えば、右側)が最大値とされている。
指標部80は、原動機回転数の大きさに応じて、長さが変化するバーである。指標部80は、例えば、第1ライン65Aと第3ライン65Cとの間に位置されて、原動機回転数の値が零の最小値である場合には、第1ライン65A及び第3ライン65Cの一端側(左側)に位置して長さが最も短く、原動機回転数の値が最大値である場合には、第1ライン65A及び第3ライン65Cの一端側(左側)から第1ライン65A及び第3ライン65Cの他端側(右側)に延びて最も長さが長くなる。回転表示部62は、数字表示部64を含んでいる。数字表示部64は、原動機回転数を数字で表示する。例えば、回転表示部62は、第1ライン65A及び第3ライン65Cの半円形の内側に配置されている。
したがって、運転表示部61によれば、エンジン回転数等の原動機回転数を、レベル表示部63によって段階的に表示し且つ、回転表示部62によって数字で表示することができる。
運転画面M1は、複数のアイコン部66を表示するアイコン表示部67を有している。アイコン表示部67は、様々な情報をアイコン部66で示す部分である。即ち、自動操舵等の走行に関する設定、例えば、設定モードで設定された設定状態をアイコン部66で表示する。アイコン表示部67は、運転表示部61とは異なる位置であって、例えば、運転画面M1の上部に配置されている。
運転画面M1は、複数のアイコン部66を表示するアイコン表示部67を有している。アイコン表示部67は、様々な情報をアイコン部66で示す部分である。即ち、自動操舵等の走行に関する設定、例えば、設定モードで設定された設定状態をアイコン部66で表示する。アイコン表示部67は、運転表示部61とは異なる位置であって、例えば、運転画面M1の上部に配置されている。
複数のアイコン部66は、第1アイコン部66A、第2アイコン部66B、第3アイコン部66C、第4アイコン部66D、第5アイコン部66E、第6アイコン部66F、第7アイコン部66G、第8アイコン部66Hである。なお、運転画面M1は、複数のアイコン部66(66A、66B、66C、66D、66E、66F、66G、66H)の全てを有する必要はなく、上述した実施形態に限定されない。
第1アイコン部66Aは、警告が発生した場合に表示される。第2アイコン部66Bは、走行基準ラインL1の始点P10が設定された場合に表示される。第3アイコン部66Cは、走行基準ラインL1の終点P11が設定された場合に表示される。
第4アイコン部66Dは、自動操舵の条件が整っている場合に表示される。
例えば、第4アイコン部66Dは、設定モードが有効、走行基準ラインL1の設定の完了、走行予定ラインL2が設定可能な状況になった場合に表示される。
第4アイコン部66Dは、自動操舵の条件が整っている場合に表示される。
例えば、第4アイコン部66Dは、設定モードが有効、走行基準ラインL1の設定の完了、走行予定ラインL2が設定可能な状況になった場合に表示される。
または、第4アイコン部66Dは、自動操舵の許可がなされている場合に表示される。例えば、第4アイコン部66Dは、設定モードが有効及び走行基準ラインL1の設定の完了時に表示される。第4アイコン部66Dを見ることによって、作業者は自動操舵が許可になっていると把握することができる。そして、作業者が、操舵切換スイッチ52を操作することにより自動操舵の開始を行うことができる。
第5アイコン部66Eは、連結部8が昇降状態である場合に表示される。第6アイコン部66Fは、4WD増速状態である場合に表示される。第7アイコン部66Gは、受信装置41の受信信号の受信感度に応じて色等が変化する。
第8アイコン部66Hは、自動操舵の条件に応じて表示が変化する。第8アイコン部66Hは、何らかの事情で自動操舵が行えない状態になった場合、例えば、設定モードが無効、受信装置41の受信信号の受信感度が低く車体位置が検出できない場合、走行基準ラインL1の設定が行われていない場合などは、自動操舵が行えないことを示す灰色になる。また、第8アイコン部66Hは、何らかの事情で自動操舵が行える状態になった場合、例えば、設定モードが有効で且つ受信装置41の受信信号の受信感度が所定以上で車体位置が検出でき、さらに、走行基準ラインL1の設定が行われている場合は、自動操舵が行えることを示す緑色になる。なお、第8アイコン部66Hにおける表示形態は、上述した表示形態に限定されない。
第8アイコン部66Hは、自動操舵の条件に応じて表示が変化する。第8アイコン部66Hは、何らかの事情で自動操舵が行えない状態になった場合、例えば、設定モードが無効、受信装置41の受信信号の受信感度が低く車体位置が検出できない場合、走行基準ラインL1の設定が行われていない場合などは、自動操舵が行えないことを示す灰色になる。また、第8アイコン部66Hは、何らかの事情で自動操舵が行える状態になった場合、例えば、設定モードが有効で且つ受信装置41の受信信号の受信感度が所定以上で車体位置が検出でき、さらに、走行基準ラインL1の設定が行われている場合は、自動操舵が行えることを示す緑色になる。なお、第8アイコン部66Hにおける表示形態は、上述した表示形態に限定されない。
図6Bは、トラクタ1の運転画面M2を示している。運転画面M2は、設定スイッチ51がONである場合、即ち、設定モードが有効である場合において、可変表示部46Bに表示される画面である。運転画面M2も運転画面M1と同様に、運転表示部61及びアイコン表示部67を含んでいる。言い換えれば、運転画面M2は、少なくとも運転情報について、運転画面M1と同じ情報を表示することが可能な画面である。運転表示部61及びアイコン表示部67は、運転画面M1と同様であるため説明を省略する。
設定モードが無効から有効になった場合、表示装置45は、運転画面M2の運転表示部61の表示状態を、運転画面M1の運転表示部61の表示状態とは異なる表示形態に変更している。つまり、表示装置45は、設定モードが有効である場合は、当該有効時の運転表示部61の表示状態を無効時の運転表示部61の表示形態とは異ならせている。
表示装置45は、運転画面M2における運転表示部61を示す色(着色)を、運転画面M1における運転表示部61を示す色(着色)とは異なる色にしている。詳しくは、表示装置45は、運転画面M2におけるレベル表示部63の目盛部65の色、即ち、第1ライン65A、第2ライン65B及び第3ライン65Cの色は、運転画面M1と同じ色にしつつ、運転画面M2の指標部80の色を運転画面M1とは異なる色にしている。即ち、設定モードを有効にした場合は、指標部80の色が、設定モードを無効にした指標部80の色とは異なる色になる。
表示装置45は、運転画面M2における運転表示部61を示す色(着色)を、運転画面M1における運転表示部61を示す色(着色)とは異なる色にしている。詳しくは、表示装置45は、運転画面M2におけるレベル表示部63の目盛部65の色、即ち、第1ライン65A、第2ライン65B及び第3ライン65Cの色は、運転画面M1と同じ色にしつつ、運転画面M2の指標部80の色を運転画面M1とは異なる色にしている。即ち、設定モードを有効にした場合は、指標部80の色が、設定モードを無効にした指標部80の色とは異なる色になる。
また、表示装置45は、運転画面M2における数字表示部64の色、即ち、原動機回転数を示す数字の色を運転画面M1とは異なる色にする。即ち、設定モードを有効にした場合は、数字表示部64の色が、設定モードを無効にした数字表示部64の色とは異なる色になる。
運転画面M2においては、設定モードになっているため、自動操舵の開始前の設定を行うことができる。図7A~図7Cは、自動操舵の開始前の設定として、走行基準ラインL1の始点P10及び終点P11の設定時の運転画面M2の画面推移を示している。図7Aに示すように、走行基準ラインL1の設定が行われていない場合、運転画面M2には、第2アイコン部66B及び第3アイコン部66Cが表示されない。運転者が操舵切換スイッチ52の操作によって走行基準ラインL1の始点P10の設定を行うと、図7Bに示すように、運転画面M2には、第2アイコン部66Bが表示される。また、運転者が操舵切換スイッチ52の操作によって走行基準ラインL1の終点P11の設定を行うと、図7Cに示すように、運転画面M2には、第3アイコン部66Cが表示される。
運転画面M2においては、設定モードになっているため、自動操舵の開始前の設定を行うことができる。図7A~図7Cは、自動操舵の開始前の設定として、走行基準ラインL1の始点P10及び終点P11の設定時の運転画面M2の画面推移を示している。図7Aに示すように、走行基準ラインL1の設定が行われていない場合、運転画面M2には、第2アイコン部66B及び第3アイコン部66Cが表示されない。運転者が操舵切換スイッチ52の操作によって走行基準ラインL1の始点P10の設定を行うと、図7Bに示すように、運転画面M2には、第2アイコン部66Bが表示される。また、運転者が操舵切換スイッチ52の操作によって走行基準ラインL1の終点P11の設定を行うと、図7Cに示すように、運転画面M2には、第3アイコン部66Cが表示される。
したがって、運転画面M2を表示した状態で、トラクタ1を走行させながら操舵切換スイッチ52を操作することによって、走行基準ラインL1の始点P10及び終点P11を設定することができる。また、運転画面M2に第2アイコン部66B及び第3アイコン部66Cが表示されているか否かを運転者が見ることによって、当該運転画面M2にて走行基準ラインL1の設定が行われているか否かを確認することができる。
さて、走行基準ラインL1の設定後において、自動操舵を行うためには、自動操舵の条件を整える必要がある。例えば、図8に示すように、トラクタ1を旋回後に当該トラクタ1の向き(進行方向)が走行基準ラインL1に対して平行でない場合、当該走行基準ラインL1に平行な走行予定ラインL2に沿ってトラクタ1を操舵することが難しく、このような場合は、自動操舵の条件は整っていないと判断される。このように、運転画面M2によって走行基準ラインL1の設定後、自動操舵の条件が整っていない場合は、図9A~図9Dに示すように、表示装置45は、可変表示部46Bに表示する画面を運転画面M2からガイダンス画面M3に切り換える。
ガイダンス画面M3は、車体3の走行に関する指令(内容)を表示する画面である。言い換えれば、ガイダンス画面M3は走行に関する設定を行うことが可能な画面である。例えば、ガイダンス画面M3は、自動操舵などの走行条件を整えるための指令(内容)を表示する画面である。例えば、図9A及び図9Bに示すように、ガイダンス画面M3は、少なくとも自動操舵の開始前に車体3の向きの変更を指示する画面であり、例えば、図9Aに示すように、車体3の向きを右に向ける指示を行ったり、図9Bに示すように、車体3の向きを左に向ける指示を行う画面である。車体3の向きを右に向けるか、又は、車体3の向きを左に向けるかの指示は、現在の車体3の進行方向によって決められる。なお、車体3の進行方向は、位置検出装置40によって検出することができる。
図8に示すように、車体3の進行方向が走行基準ラインL1の延びる方向(長手方向)に対して右側に斜めになっている場合は、ガイダンス画面M3は、車体3の向きを左に向ける指示を行う。また、図8に示すように、車体3の進行方向が走行基準ラインL1の長手方向に対して左側に斜めになっている場合は、ガイダンス画面M3は、車体3の向きを右に向ける指示を行う。
ガイダンス画面M3は、メッセージ表示部70を含んでいる。メッセージ表示部70は、車体3の操舵を文字(メッセージ)で説明する部分である。即ち、メッセージ表示部70は、走行の指令(内容)として、車体3の操舵方向を文字で示す部分である。
図9Aに示すように、メッセージ表示部70は、車体3の進行方向を右に向ける必要がある場合には、車体3を右に向ける旨の文字を表示する。図9Bに示すように、メッセージ表示部70は、車体3の進行方向を左に向ける必要がある場合には、車体3を左に向ける旨の文字を表示する。
図9Aに示すように、メッセージ表示部70は、車体3の進行方向を右に向ける必要がある場合には、車体3を右に向ける旨の文字を表示する。図9Bに示すように、メッセージ表示部70は、車体3の進行方向を左に向ける必要がある場合には、車体3を左に向ける旨の文字を表示する。
また、図9Cに示すように、メッセージ表示部70は、車体3の進行方向を維持する場合には、車体3を直進(真っ直ぐ)にする旨の文字を表示する。図9Dに示すように、メッセージ表示部70は、車体3を所定距離、直進させる必要がある場合で、直進距離が所定距離に達しない場合は、直進距離が所定距離に達していない旨の表示を行う。なお、図9Dにおいて、メッセージ表示部70に、車体3を所定距直進させる旨の表示を行ってもよい。
ガイダンス画面M3は、操舵指示部69を含んでいる。操舵指示部69は、車体3の操舵方向を示す部分である。図9Aに示すように、操舵指示部69は、車体3の進行方向を右に向ける必要がある場合には、車体3の進行方向を右に向ける矢印を表示する。図9Bに示すように、操舵指示部69は、車体3の進行方向を左に向ける必要がある場合には、車体3の進行方向を左に向ける矢印を表示する。図9Cに示すように、車体3の進行方向を維持する場合には、互いに向き合う一対の矢印を表示することで、車体3を直進(真っ直ぐ)にすることを示す。
また、ガイダンス画面M3は、運転表示部61と、ハンドル表示部68とを含んでいる。即ち、ガイダンス画面M3では、運転表示部61及びハンドル表示部68を同じ画面(同一画面)で表示している。詳しくは、ガイダンス画面M3において、説明を変更する部分(範囲)MA1に運転表示部61及びハンドル表示部68を表示している。ガイダンス画面M3における運転表示部61は、運転画面M1、M2と同様に、運転情報を表示する部分であって、少なくとも運転画面M1、M2で示した運転情報の一部を表示している。この実施形態では、ガイダンス画面M3における運転表示部61は、原動機回転数を数字で示す数字表示部64を含んでいて、エンジン回転数等を表示する。なお、ガイダンス画面M3における運転表示部61は、運転画面M1、M2で示した回転表示部62を含んでいてもよい。或いは、ガイダンス画面M3における運転表示部61は、運転画面M1、M2で示した数字表示部64と回転表示部62との両方を含んでいてもよい。
ハンドル表示部68は、ステアリングハンドル30を図形等で示す部分である。ハンドル表示部68の一方側又は他方側に運転表示部61が表示されている。ハンドル表示部68と操舵指示部69とは離れて表示されている。なお、ハンドル表示部68と操舵指示部69とはオーバラップして表示されていてもよい。
ハンドル表示部68は、ステアリングハンドル30において運転者が把持する円形状の把持部68Aと、把持部68Aを連結する連結部68Bとを有している。ハンドル表示部68の操舵方向は、車体3の操舵方向の指示に応じて変更される。
ハンドル表示部68は、ステアリングハンドル30において運転者が把持する円形状の把持部68Aと、把持部68Aを連結する連結部68Bとを有している。ハンドル表示部68の操舵方向は、車体3の操舵方向の指示に応じて変更される。
例えば、ハンドル表示部68及びメッセージ表示部70を同一画面、即ち、ガイダンス画面M3に表示した場合、ハンドル表示部68の操舵方向は、メッセージ表示部70で示された操舵方向に応じて変更される。或いは、ハンドル表示部68及び操舵指示部69を同一画面、即ち、ガイダンス画面M3に表示した場合、ハンドル表示部68の操舵方向は、操舵指示部69で示された操舵方向に応じて変更される。或いは、ハンドル表示部68、メッセージ表示部70及び操舵指示部69を同一画面、ガイダンス画面M3に表示した場合、ハンドル表示部68の操舵方向は、メッセージ表示部70及び操舵指示部69で示された操舵方向に応じて変更される。
図9Aに示すように、ハンドル表示部68は、車体3の進行方向を右に向ける必要がある場合には、把持部68A及び連結部68Bを、把持部68Aの中心周りに右に回転させることで操舵方向が右であることを示す。図9Bに示すように、ハンドル表示部68は、車体3の進行方向を左に向ける必要がある場合には、把持部68A及び連結部68Bを、把持部68Bの中心周りに左に回転させることで操舵方向が左であることを示す。図9Cに示すように、車体3の進行方向を維持する場合には、把持部68A及び連結部68Bの回転を行わないことで操舵方向が真っ直ぐであることを示す。
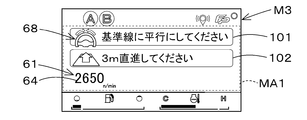
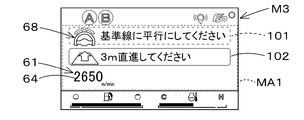
図16A及び図16Bは、ガイダンス画面M3の変形例を示している。ガイダンス画面M3は、走行条件を示す複数の条件表示部を含んでいる。複数の条件表示部は、第1条件を示す第1条件表示部101と、第2条件を示す第2条件表示部102とである。この実施形態では、2つの条件を示す条件表示部を例に説明するが条件表示部の数は実施形態に限定されない。
第1条件表示部101は、自動操舵の条件として、トラクタ1(車体3)の進行方向を走行基準ラインL1と平行にする旨、例えば、「基準線に平行にしてください」を表示する。第2条件表示部102は、自動操舵の条件として、トラクタ1(車体3)を所定距離、直進距離させる旨、例えば、「3m直進してください」を表示する。ガイダンス画面M3において、複数の条件表示部のうち、走行条件が成立した条件表示部(条件成立表示部)は、走行条件が成立していない条件表示部(条件不成立表示部)と表示形態を変更する。例えば、図16Bに示すように、自動操舵において、トラクタ1(車体3)の進行方向が走行基準ラインL1と平行になり且つ直進距離が所定距離に見た満たない場合は、第1条件表示部101の色を彩度の低い色(例えば、白、灰色等)に着色し、第2条件表示部102の色を彩度の高い色に着色する。詳しくは、表示装置45は、条件成立表示部の文字の彩度を、条件不成立表示部の文字の彩度よりも低く設定する。これにより、運転者は、走行条件を満たしている項目と走行条件を満たしていない項目とを簡単に把握することができる。
以上、ガイダンス画面M3によれば、トラクタ1(車体3)の走行条件を整えるための指令(内容)を表示しているため、運転者は、ガイダンス画面M3に示された指令を見ることによって、操舵及び走行をしながらトラクタ1(車体3)を、走行条件を整える状態にすることができる。ガイダンス画面M3では、運転情報が表示されることから、走行条件を整えるためにトラクタ1の走行が必要である場合、トラクタ1の運転情報を見ながらトラクタ1を走行させつつ、当該トラクタ1を走行条件に適合する状態にすることができる。また、ガイダンス画面M3において、ハンドル表示部68と運転表示部61との両方を表示しているため、例えば、運転情報とステアリングハンドル30の操舵方向との両方を把握しながらトラクタ1を走行させることができる。
図8に示すように、トラクタ1(車体3)の進行方向が走行基準ラインL1と略平行になり、自動操舵の条件が整うと、表示装置45は、可変表示部46Bに表示する画面を、ガイダンス画面M3から運転画面M2に戻す。ここで、運転者が操舵切換スイッチ52の操作を行い、自動操舵が開始されると、図10Aに示すように、運転画面M2にて運転情報を表示しながら自動操舵を行うことができる。自動操舵が行われている状況下において、補正スイッチ53が操作されると、表示装置45は、運転画面M2に車体位置の補正量を表示する。図10B及び図10Cに示すように、運転画面M2における運転表示部61は、補正表示部71を含んでいる。補正表示部71は、運転情報として車体位置の補正量を表示する部分である。即ち、表示装置45は、設定モードが有効である場合に、補正表示部71を表示する。
図10B及び図10Cに示すように、補正表示部71で示された数字は、補正スイッチ53の操作回数を示していて、当該補正表示部71は、操作回数を補正量として表示する。上述したように、補正量は操作回数に対応しているため、運転者が操作回数を見ることによって補正量を段階的に把握することができる。
具体的には、補正表示部71は、第1補正表示部72と、第2補正表示部73とを含んでいる。第1補正表示部72は、車体3の幅方向における一方側、即ち、左側の車体位置の補正量(左補正量)を表示する部分である。第2補正表示部73は、車体3の幅方向における他方側、即ち、右側の車体位置の補正量(右補正量)を表示する部分である。運転画面M2には、補正スイッチ53が操作された場合、第1補正表示部72及び第2補正表示部73のいずれか一方が表示される。
具体的には、補正表示部71は、第1補正表示部72と、第2補正表示部73とを含んでいる。第1補正表示部72は、車体3の幅方向における一方側、即ち、左側の車体位置の補正量(左補正量)を表示する部分である。第2補正表示部73は、車体3の幅方向における他方側、即ち、右側の車体位置の補正量(右補正量)を表示する部分である。運転画面M2には、補正スイッチ53が操作された場合、第1補正表示部72及び第2補正表示部73のいずれか一方が表示される。
図10Bに示すように、第1補正表示部72は、自動操舵中において第1補正部53Aが操作された場合、レベル表示部63の左側に表示される。図10Cに示すように、第2補正表示部73は、自動操舵中において第2補正部53Bが操作された場合、レベル表示部63の右側に表示される。即ち、第1補正表示部72は、第1補正部53Aに対応して左側に表示され、第2補正表示部73は、第2補正部53Bに対応して右側に表示される。
第1補正表示部72は、矢印部74Aと、数値部75Aとを含んでいる。矢印部74Aは、補正された向き、即ち、車体3の幅方向における一方側(左側)を示している。数値部75Aは、第1補正部53Aの操作回数を示しており、操作回数が増加するにつれて数値がカウントアップされる。第2補正表示部73は、矢印部74Bと、数値部75Bとを含んでいる。矢印部74Bは、補正された向き、即ち、車体3の幅方向における他方側(右側)を示している。数値部75Bは、第2補正部53Bの操作回数を示しており、操作回数が増加するにつれて数値がカウントアップされる。
なお、上述した実施形態では、補正表示部71は、操作回数を補正量として表示することで、補正量の大きさを段階的に示していたが、これに代え、補正量を段階的に示す場合として、図11に示すように、車体位置の補正量に基づいて、矢印部74A、74Bの長さを変更したり、又は、矢印部74A、74Bに複数段のレベル(指標部)76を設けて補正量に応じてレベル76を変更してもよい。指標部76において、例えば、補正スイッチ53の操作回数が増加するにつれて表示個数が増加する、又は、補正スイッチ53の操舵量が増加するにつれて表示個数が増加する。また、補正表示部71は、補正量のそのものを数字で示してもよい。
表示装置45は、図10A~図10Cのいずれかの運転画面M2を表示している状況において、操舵切換スイッチ52の操作が行われ自動操舵が終了すると、当該運転画面M2に自動操舵が終了した旨の表示を行い、図9Cに示す運転画面M2及び図6Aに示す運転画面M1のいずれかに戻る。
以上、運転画面M2に補正表示部71が表示されるため、運転者は、自動操舵中に補正表示部71を見ることにより、補正スイッチ53による補正量と、どちらの方向の補正量を行っているかを簡単に把握することができる。
以上、運転画面M2に補正表示部71が表示されるため、運転者は、自動操舵中に補正表示部71を見ることにより、補正スイッチ53による補正量と、どちらの方向の補正量を行っているかを簡単に把握することができる。
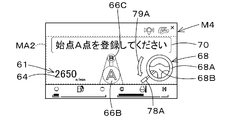
上述した実施形態では、表示装置45に運転画面M1を表示している状態で、設定スイッチ51をOFFからONにした場合に運転画面M2を経由して、車体3の走行に関する指令を表示するガイダンス画面M3を表示していたが、運転画面M1を表示した状態から画面切換スイッチ54を操作した場合又は運転画面M2を表示した状態から画面切換スイッチ54を操作した場合、図12A~図12Cに示すようなガイダンス画面M4を表示することが可能である。ガイダンス画面M4は、走行に関する設定を行う画面であって、例えば、走行基準ラインL1の設定、車体3の走行条件を整える指令(内容)を表示する画面である。言い換えれば、ガイダンス画面M4は、走行条件を整えるためのナビゲーションを表示可能な画面である。
図12A~図12Cに示すように、ガイダンス画面M4は、メッセージ表示部70と、運転表示部61と、ハンドル表示部68とを含んでいる。即ち、ガイダンス画面M3でも、運転表示部61及びハンドル表示部68を同じ画面(同一画面)で表示している。
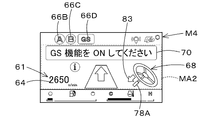
メッセージ表示部70は、様々な指令を文字で表示する部分であって、図12Aに示すように、設定モードが無効に設定された場合、メッセージ表示部70は、設定スイッチ51をONにする旨の表示、例えば、「GSモードにして下さい」を表示する。図12Bに示すように、設定モードが有効に設定された場合、メッセージ表示部70は、走行基準ラインL1の始点P10を設定する旨の表示、例えば、「始点を登録して下さい」を表示する。また、図12Cに示すように、メッセージ表示部70は、走行基準ラインL1の始点P10を設定する旨の表示、例えば、「終点を登録して下さい」を表示する。
メッセージ表示部70は、様々な指令を文字で表示する部分であって、図12Aに示すように、設定モードが無効に設定された場合、メッセージ表示部70は、設定スイッチ51をONにする旨の表示、例えば、「GSモードにして下さい」を表示する。図12Bに示すように、設定モードが有効に設定された場合、メッセージ表示部70は、走行基準ラインL1の始点P10を設定する旨の表示、例えば、「始点を登録して下さい」を表示する。また、図12Cに示すように、メッセージ表示部70は、走行基準ラインL1の始点P10を設定する旨の表示、例えば、「終点を登録して下さい」を表示する。
ガイダンス画面M4における運転表示部61も、運転画面M1、M2と同様に、運転情報を表示する部分であって、少なくとも運転画面M1、M2で示した運転情報の一部を表示している。ガイダンス画面M4において、説明を変更する部分(範囲)MA2に運転表示部61を表示している。この実施形態では、ガイダンス画面M4における運転表示部61は、原動機回転数を数字で示す数字表示部64を含んでいて、エンジン回転数等を表示する。なお、ガイダンス画面M4における運転表示部61も、運転画面M1、M2で示した回転表示部62を含んでいてもよい。或いは、ガイダンス画面M4における運転表示部61も、運転画面M1、M2で示した数字表示部64と回転表示部62との両方を含んでいてもよい。
ガイダンス画面M4におけるハンドル表示部68も把持部68A及び連結部68Bを有している。また、ガイダンス画面M4におけるハンドル表示部68は、操舵切換スイッチ52を図形で示した切換表示部78Aを示している。図12Bに示すように、切換表示部78Aは、走行基準ラインL1の始点P10を設定する際の操作位置を示しており、切換表示部78Aの先端部は、中立位置よりも把持部68Aの下側に位置している。図12Cに示すように、切換表示部78Aは、走行基準ラインL1の終点P11を設定する際の操作位置を示しており、切換表示部78Aの先端部は、中立位置よりも把持部68Aの上側に位置している。また、ガイダンス画面M4は、走行基準ラインL1の始点P10及び終点P11を設定するに際して、操舵切換スイッチ52の操作方向を切換表示部78Aに対応して矢印部79Aで示している。また、ガイダンス画面M4には、アイコン表示部67とは別の位置、即ち、幅方向の中央部に、走行基準ラインL1の始点P10を示す第2アイコン部66B、走行基準ラインL1の終点P11を示す第3アイコン部66Cが表示される。
なお、画面切換スイッチ54を操作した場合に、位置検出装置40のウォームアップが必要な場合には、表示装置45には、図13に示すようなウォームアップを示すウォームアップ画面が表示される。表示装置45は、ウォームアップが完了すると、図12Aに示すガイダンス画面M4に切り換える。
以上、ガイダンス画面M4では、走行基準ラインL1の設定を説明付きで行うことができる。即ち、運転画面M2においても走行基準ラインL1の設定を行うことができるが、表示装置45は、運転画面M2とは別にガイダンス画面M4を表示するため、運転者は、自動操舵の設定を知らなくてもガイダンス画面M4によって走行基準ラインL1の設定を行うことができる。
以上、ガイダンス画面M4では、走行基準ラインL1の設定を説明付きで行うことができる。即ち、運転画面M2においても走行基準ラインL1の設定を行うことができるが、表示装置45は、運転画面M2とは別にガイダンス画面M4を表示するため、運転者は、自動操舵の設定を知らなくてもガイダンス画面M4によって走行基準ラインL1の設定を行うことができる。
なお、ガイダンス画面M4における走行に関する指令により走行基準ラインL1等が設定された後、画面切換等の操作によって運転画面M1、M2に切り換えた場合、運転画面M1、M2には、走行基準ラインL1の始点P10が設定されたこと及び終点P11が設定されたことが、第2アイコン部66B、第3アイコン部66Cにより表示される。
また、図12A~図12Cに示したように、ガイダンス画面M4において、走行基準ラインL1の設定後、自動操舵の条件が整っていない場合、表示装置45は、図9A~図9Dに示すように、可変表示部46Bに表示する画面をガイダンス画面M4からガイダンス画面M3に切り換える。また、表示装置45は、可変表示部46Bに表示する画面をガイダンス画面M4からガイダンス画面M3に切り換えた後、自動操舵の条件が整った場合には、図14Aに示すように、再びガイダンス画面M4を表示する。
また、図12A~図12Cに示したように、ガイダンス画面M4において、走行基準ラインL1の設定後、自動操舵の条件が整っていない場合、表示装置45は、図9A~図9Dに示すように、可変表示部46Bに表示する画面をガイダンス画面M4からガイダンス画面M3に切り換える。また、表示装置45は、可変表示部46Bに表示する画面をガイダンス画面M4からガイダンス画面M3に切り換えた後、自動操舵の条件が整った場合には、図14Aに示すように、再びガイダンス画面M4を表示する。
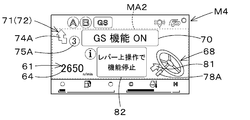
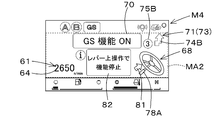
図14Aに示すように、走行基準ラインL1が設定され且つ自動操舵の条件が整った場合は、ガイダンス画面M4に第2アイコン部66B及び第3アイコン部66Cに加え、第4アイコン部66Dが表示される。また、自動操舵の開始が行われていない状況において、ガイダンス画面M4のメッセージ表示部70には、操舵切換スイッチ52による自動操舵の開始が可能である旨、例えば、「GS機能をONにして下さい」が表示される。また、また、自動操舵の開始が行われていない状況において、ガイダンス画面M4には、矢印部83が表示される。矢印部83は、ハンドル表示部68及び切換表示部78Aの近傍に位置していて、自動操舵の開始を指示するための操舵切換スイッチ52の操作方向を示している。図14Aに示すように、自動操舵の条件が整い且つ自動操舵の開始が行われていない状況では、ガイダンス画面M4に示したメッセージ表示部70及び矢印部83は、操舵切換スイッチ52による自動操舵の開始が可能である旨を示す指示表示部となる。なお、メッセージ表示部70及び矢印部83の表示方法は上述した実施形態に限定されない。また、指示表示部として、メッセージ表示部70及び矢印部83の両方を示したが、指示表示部は、メッセージ表示部70及び矢印部83のいずれか一方であってもよい。
運転者が操舵切換スイッチ52を操作することにより、自動操舵を開始すると、ガイダンス画面M4の表示状態は、図14B及び図14Cに示す状態に変わる。図14B及び図14Cに示すように、自動操舵を開始後もガイダンス画面M4には、運転表示部61及びハンドル表示部68が表示される。
図14B及び図14Cに示すように、自動操舵の開始後、ガイダンス画面M4には、メッセージ表示部70とは他にメッセージ表示部82が表示される。メッセージ表示部82には、操舵切換スイッチ52が操作することにより自動操舵を停止(終了)させる旨の表示、例えば、「レバー上操作で機能停止」を表示する。自動操舵の開始後、ガイダンス画面M4には、矢印部81が表示される。矢印部81は、ハンドル表示部68及び切換表示部78Aの近傍に位置していて、自動操舵の終了を指示するための操舵切換スイッチ52の操作方向を示している。
図14B及び図14Cに示すように、自動操舵の開始後、ガイダンス画面M4には、メッセージ表示部70とは他にメッセージ表示部82が表示される。メッセージ表示部82には、操舵切換スイッチ52が操作することにより自動操舵を停止(終了)させる旨の表示、例えば、「レバー上操作で機能停止」を表示する。自動操舵の開始後、ガイダンス画面M4には、矢印部81が表示される。矢印部81は、ハンドル表示部68及び切換表示部78Aの近傍に位置していて、自動操舵の終了を指示するための操舵切換スイッチ52の操作方向を示している。
また、自動操舵が行われている状況下において、補正スイッチ53が操作されると、表示装置45は、ガイダンス画面M4に車体位置の補正量、即ち、補正表示部71を表示する。ガイダンス画面M4に表示した補正表示部71は、運転画面M2に表示した補正表示部71と同一であり、操作回数を補正量として表示する。また、ガイダンス画面M4に表示した補正表示部71も第1補正表示部72と、第2補正表示部73とを含んでいる。図14Bに示すように、ガイダンス画面M4の第1補正表示部72は、自動操舵中において第1補正部53Aが操作された場合、メッセージ表示部82の左側に表示される。図14Cに示すように、第2補正表示部73は、自動操舵中において第2補正部53Bが操作された場合、メッセージ表示部82の右側に表示される。なお、ガイダンス画面M4の第1補正表示部72は、矢印部74Aと数値部75Aとを含み、ガイダンス画面M4の第2補正表示部73は、矢印部74Bと数値部75Bとを含んでいるが、運転画面M2と同様であるため説明を省略する。
表示装置45は、図14B及び図14Cのいずれかのガイダンス画面M4を表示している状況において、操舵切換スイッチ52の操作が行われ自動操舵が終了すると、当該ガイダンス画面M4に自動操舵が終了した旨の表示を行い、図14Aに示すガイダンス画面M4及び図6Aに示す運転画面M1のいずれかに戻る。
さて、表示装置45は、上述したように、自動操舵等の走行条件を整った後に、自動操舵等の走行を維持するための条件を表示可能である。具体的には、表示装置45は、自動操舵中において、当該自動操舵を維持するガイダンス画面M4を表示する。図14B及び図14Cに示すガイダンス画面M4を表示しながら自動操舵を行っている状況において、トラクタ1(車体3)の車速が予め定められた速度以上になった場合、図14B及び図14Cに示すガイダンス画面M4が図15Aのガイダンス画面M4に切り換わる。図15Aのガイダンス画面M4のメッセージ表示部70は、自動操舵中のトラクタ1の状態、即ち、車速が超過している旨を表示する。また、ガイダンス画面M4のメッセージ表示部82は、自動操舵を維持する条件として、車速を低下させる旨の表示、「速度が超過しています。速度を落としてください」を表示する。また、ガイダンス画面M4の運転表示部61は、車速表示部90を含んでいる。車速表示部90は、現在の車速、即ち、自動操舵中の車速を数字で表示する。運転者がアクセル等の操作によって、トラクタ1(車体3)の車速を自動操舵で定められた車速以下に減少させると、ガイダンス画面M4は、再び図14B及び図14Cに示すガイダンス画面M4に切り換わる。
さて、表示装置45は、上述したように、自動操舵等の走行条件を整った後に、自動操舵等の走行を維持するための条件を表示可能である。具体的には、表示装置45は、自動操舵中において、当該自動操舵を維持するガイダンス画面M4を表示する。図14B及び図14Cに示すガイダンス画面M4を表示しながら自動操舵を行っている状況において、トラクタ1(車体3)の車速が予め定められた速度以上になった場合、図14B及び図14Cに示すガイダンス画面M4が図15Aのガイダンス画面M4に切り換わる。図15Aのガイダンス画面M4のメッセージ表示部70は、自動操舵中のトラクタ1の状態、即ち、車速が超過している旨を表示する。また、ガイダンス画面M4のメッセージ表示部82は、自動操舵を維持する条件として、車速を低下させる旨の表示、「速度が超過しています。速度を落としてください」を表示する。また、ガイダンス画面M4の運転表示部61は、車速表示部90を含んでいる。車速表示部90は、現在の車速、即ち、自動操舵中の車速を数字で表示する。運転者がアクセル等の操作によって、トラクタ1(車体3)の車速を自動操舵で定められた車速以下に減少させると、ガイダンス画面M4は、再び図14B及び図14Cに示すガイダンス画面M4に切り換わる。
また、図14B及び図14Cに示すガイダンス画面M4を表示しながら自動操舵を行っている状況において、トラクタ1(車体3)の車速が零になった場合、図14B及び図14Cに示すガイダンス画面M4が図15Bのガイダンス画面M4に切り換わる。図15Bのガイダンス画面M4のメッセージ表示部70は、自動操舵中のトラクタ1の状態、即ち、車速が零である旨を表示する。また、ガイダンス画面M4のメッセージ表示部82は、自動操舵を維持する条件として、車速を零よりも大きくする旨の表示、「車両が停車しています。速度を回復してください」を表示する。運転者がアクセル等の操作によって、トラクタ1(車体3)の車速を零よりも大きくすると、ガイダンス画面M4は、再び図14B及び図14Cに示すガイダンス画面M4に切り換わる。
上述した実施形態では、自動操舵の開始後に表示されるガイダンス画面M4を表示中に、自動操舵の維持する条件を示す画面として、図15A及び図15Bを示したが、図10A~図10Cの運転画面M2を表示しながら自動操舵を行っている場合において、車速が予め定められた速度以上になった場合又は車速が零になった場合、可変表示部46Bに表示する画面を運転画面M2から図15Aのガイダンス画面M4、又は、図15Bのガイダンス画面M4に切り換えてもよい。可変表示部46Bに表示する画面が図15Aのガイダンス画面M4及び図15Bのガイダンス画面M4に切り換えられ後、自動操舵を維持する条件を満たすと、ガイダンス画面M4から運転画面M2に切り換えられる。
作業車両1は、走行可能な車体3と、車体3の操舵を回転の操作によって行うステアリングハンドル30と、車体3に設けられ、且つ測位衛星の信号に基づいて車体3の位置を検出する位置検出装置40と、位置検出装置40で検出された車体3の位置の補正を指令する補正スイッチ53と、補正スイッチ53の操作により補正された車体3の位置である補正車体位置と、走行予定ラインL2に基づいて車体3を自動操舵する自動操舵機構37とを備えている。これによれば、様々な影響により位置検出装置40で検出された車体3の位置(演算車体位置W1)が実際のトラクタ1等の作業車両1(車体3)の実際位置W2とズレた場合であっても、自動操舵の開始後に補正スイッチ53によって車体3の位置(車体位置)を補正することにより、車体3と走行予定ラインL2に沿って走行させることができる。つまり、補正スイッチ53により演算車体位置W1を補正することができるため、位置検出装置40による検出精度の影響を軽減することができる。
補正スイッチ53は、車体3の幅方向における一方側の車体3の位置の補正を指令する第1補正部53Aと、車体3の幅方向における他方側の車体3の位置の補正を指令する第2補正部53Bとを含んでいる。これによれば、演算車体位置W1が一方側又は他方側にズレた場合であっても、第1補正部53A、第2補正部53Bによって、ズレの方向に対して簡単に演算車体位置W1を補正することができる。
補正スイッチ53が接続され、且つ、自動操舵機構37を制御する制御装置60を備え、制御装置60は、補正スイッチ53の操作回数に基づいて、車体3の位置の補正量を設定する。これによれば、運転者が補正スイッチ53の操作回数を増減するだけで、補正量を変更することができる。
制御装置60は、補正スイッチ53の操作量に基づいて、車体3の位置の補正量を設定する。これによれば、運転者が補正スイッチ53の操作量を調整するだけで、補正量を変更することができる。
制御装置60は、補正スイッチ53の操作量に基づいて、車体3の位置の補正量を設定する。これによれば、運転者が補正スイッチ53の操作量を調整するだけで、補正量を変更することができる。
作業車両1は、自動操舵と手動操舵とを切り換える操舵切換スイッチ52を備えている。これによれば、走行予定ラインL2に沿って車体3を走行させる自動操舵と、運転者がステアリングハンドル30を用いて車体3を走行させる手動操舵との切換を簡単にすることができる。
また、作業車両1は、ステアリングハンドル30と、ステアリングハンドル30による手動操舵と、走行予定ラインに基づくステアリングハンドル30の自動操舵とのいずれかで走行可能な車体3と、少なくとも自動操舵の開始前の設定を行う設定モードを有効又は無効に切り換える設定スイッチ51と、車体3の走行時の運転情報を表示する運転表示部61を有し、且つ、設定モードが有効に切り換えられた場合に運転表示部61の表示状態を設定モードが無効とは異なる表示状態に変更する表示装置45と、を備えている。これによれば、手動操舵と自動操舵とを行うことができる車体3において、運転者が運転表示部61を見るだけで、運転者が簡単に自動操舵前の設定を行うことができる状態であるか否かを簡単に把握することができる。
また、作業車両1は、ステアリングハンドル30と、ステアリングハンドル30による手動操舵と、走行予定ラインに基づくステアリングハンドル30の自動操舵とのいずれかで走行可能な車体3と、少なくとも自動操舵の開始前の設定を行う設定モードを有効又は無効に切り換える設定スイッチ51と、車体3の走行時の運転情報を表示する運転表示部61を有し、且つ、設定モードが有効に切り換えられた場合に運転表示部61の表示状態を設定モードが無効とは異なる表示状態に変更する表示装置45と、を備えている。これによれば、手動操舵と自動操舵とを行うことができる車体3において、運転者が運転表示部61を見るだけで、運転者が簡単に自動操舵前の設定を行うことができる状態であるか否かを簡単に把握することができる。
作業車両1は、原動機4を備え、運転表示部61は、運転情報として原動機の回転数を表示する回転表示部62を含み、表示装置45は、設定モード時に回転表示部62の色を、設定モードが無効とは異なる色に変更する。これによれば、運転者が運転を行う際に特に注視する原動機の回転数の色の違いによって、設定モードが有効であるか無効であるかを指し示すことができる。言い換えれば、運転者に対して設定モードが有効であることをいち早く気付かせることができる。
回転表示部62は、原動機の回転数を段階的に表示するレベル表示部63と、原動機の回転数を数字で表示する数字表示部64とを含んでいる。これによれば、運転者は、少なくともレベル表示部63及び原動機の回転数のいずれかを見た時点で、設定モードが有効であるか無効であるかを簡単に把握することができる。
作業車両1は、車体3に設けられ、且つ測位衛星の信号に基づいて車体3の位置を検出する位置検出装置40と、位置検出装置40で検出された車体3の位置の補正する補正スイッチ53と、を備え、運転表示部61は、運転情報として補正スイッチ53による車体3の位置の補正量を表示する補正表示部71を含み、表示装置45は、設定モード時に補正表示部71を表示する。これによれば、運転者は、運転表示部61に表示された運転情報と補正表示部71に表示された補正量とを同時に把握することができ、自動操舵の状況を把握しやすい。
作業車両1は、車体3に設けられ、且つ測位衛星の信号に基づいて車体3の位置を検出する位置検出装置40と、位置検出装置40で検出された車体3の位置の補正する補正スイッチ53と、を備え、運転表示部61は、運転情報として補正スイッチ53による車体3の位置の補正量を表示する補正表示部71を含み、表示装置45は、設定モード時に補正表示部71を表示する。これによれば、運転者は、運転表示部61に表示された運転情報と補正表示部71に表示された補正量とを同時に把握することができ、自動操舵の状況を把握しやすい。
補正表示部71は、補正スイッチ53の操作回数を補正量として表示する。これによれば、運転者が補正表示部71に表示された補正スイッチ53の操作回数を見るだけで、演算車体位置W1がどの程度補正されているかを簡単に把握することができる。補正表示部71は、補正量の大きさを段階的に表示する。これによれば、運転者が補正表示部71に表示された補正量の大きさの段階を見るだけで、演算車体位置W1がどの程度補正されているかを簡単に把握することができる。
補正表示部71は、車体3の幅方向における一方側の車体3の位置の補正量を表示する第1補正表示部72と、車体3の幅方向における他方側の車体3の位置の補正量を表示する第2補正表示部73とを含んでいる。これによれば、運転者が第1補正表示部72及び第2補正表示部73のいずれかを見るだけで、車体3の幅方向における一方側又は他方側に対する演算補正量がどの程度であるかを簡単に把握することができる。
作業車両1は、表示装置45を備え、表示装置45は、ステアリングハンドル30を示すハンドル表示部68と、車体3の走行時の運転情報を表示する運転表示部61とを有し、且つ、ハンドル表示部68及び運転表示部61を同一画面に表示する。これによれば、ハンドル表示部68と運転表示部61とが同一画面に表示されることから、自動操舵及び手動操舵のいずれかを行う場合に、ステアリングハンドル30に関する状態と運転情報とを同時に把握することができる。即ち、簡単にステアリングハンドルの操舵について運転者が把握することができる。例えば、同一画面に表示された運転表示部及びハンドル表示部を見ることによって、運転者は、手動操舵及び自動操舵のいずれかの走行時において、走行時の運転情報と、ステアリングハンドルの操舵との両方を把握しながら操縦を行うことができる。
ハンドル表示部68及び運転表示部61は、少なくとも自動操舵の開始前に車体3の向きの変更を指示するガイダンス画面に表示される。これによれば、自動操舵の開始前に車体3の向きを変更する必要がある場合に、運転者は、ハンドル表示部68を見ながらステアリングハンドル30の操舵をしつつ、ステアリングハンドル30の操舵時の運転情報を運転表示部61から判断することができる。
表示装置45は、同一画面に表示され、且つ車体3の操舵方向を示す操舵指示部69を有している。これによれば、運転者は、ハンドル表示部68及び操舵指示部69を同一画面で同時に見ることができ、ハンドル表示部68からステアリングハンドル30を操舵する必要があること、ステアリングハンドル30の操舵方向がどの方向であるかを簡単に把握することができる。
表示装置45は、同一画面に表示され、且つ車体3の操舵を説明するメッセージを表示するメッセージ表示部70を有している。これによれば、運転者は、ハンドル表示部68及びメッセージ表示部70を同一画面で同時に見ることができ、ハンドル表示部68からステアリングハンドル30を操舵する必要があること、メッセージ表示部70の操舵について簡単に把握することができる。
ハンドル表示部68の操舵方向は、操舵方向の指示に応じて変更する。これによれば、運転者は、ハンドル表示部68を見るだけで、ステアリングハンドル30の操舵方向を把握することができる。
作業車両1は、少なくとも自動操舵の開始前の設定を行う設定モードに切り換える設定スイッチ51を備え、設定モード時に、ハンドル表示部68及び運転表示部61は同一画面に表示される。これによれば、自動操舵の開始前の設定について、ハンドル表示部68及び運転表示部61を見ながら簡単に行うことができる。
作業車両1は、少なくとも自動操舵の開始前の設定を行う設定モードに切り換える設定スイッチ51を備え、設定モード時に、ハンドル表示部68及び運転表示部61は同一画面に表示される。これによれば、自動操舵の開始前の設定について、ハンドル表示部68及び運転表示部61を見ながら簡単に行うことができる。
表示装置45は、設定モードにおいて自動操舵の開始又は終了を切り換える操舵切換スイッチ52を備え、表示装置45は、操舵切換スイッチ52による自動操舵の開始が可能である旨を示す指示表示部を有している。これによれば、運転者は、表示装置45に表示された指示表示部を見るだけで、自動操舵を行える状態であるか否かを把握することができると共に、自動操舵が行えることができる場合には、操舵切換スイッチ52によって簡単に自動操舵の開始を切り換えることができる。
作業車両1は、走行可能な車体3と、車体3の操舵を行うステアリングハンドル30と、車体3の走行時の運転情報を表示する運転画面と、車体3の走行に関する指令を表示するガイダンス画面とを表示可能な表示装置45と、を備え、表示装置45は、少なくとも運転画面で表示した運転情報の一部をガイダンス画面に表示する。これによれば、運転者がガイダンス画面を見ながら車体3の走行に関する設定を行う場合に、当該ガイダンス画面に運転情報が表示されるため、簡単に走行に関する設定を行うことができる。言い換えれば、ガイダンス画面を見ながらでも、運転者は、簡単に運転を行うことができる。
作業車両1は、原動機4を備え、表示装置45は、運転情報として原動機の回転数をガイダンス画面に表示する。これによれば、作業車両1の運転において重要な原動機の回転数をガイダンス画面に表示しているため、運転者はガイダンス画面で原動機の回転数を見ながら作業車両1の運転を行うことができる。
作業車両1は、運転席10を備え、表示装置45は、運転席10の前方、且つ、ステアリングハンドル30に対応する位置に設けられている。これによれば、運転者が通常運転席10に座って運転をする状態で、表示装置45に表示されたガイダンス画面を見ることができ、ガイダンス画面の情報を把握しつつ運転を行うことができる。
作業車両1は、運転席10を備え、表示装置45は、運転席10の前方、且つ、ステアリングハンドル30に対応する位置に設けられている。これによれば、運転者が通常運転席10に座って運転をする状態で、表示装置45に表示されたガイダンス画面を見ることができ、ガイダンス画面の情報を把握しつつ運転を行うことができる。
表示装置45は、指令(内容)を文字で示すメッセージ表示部70、77と運転情報を示す運転表示部61とをガイダンス画面に表示する。これによれば、メッセージ表示部70、77の情報と、運転表示部61に表示された運転情報との両方を見ながら、メッセージ表示部70、77に対応した運転を行うことができる。
作業車両1は、走行可能な車体3と、車体3の操舵を行うステアリングハンドル30と、少なくとも車体3の走行条件を整える指令を表示するガイダンス画面を表示可能な表示装置45と、を備えている。これによれば、作業車両1において走行条件を整えて走行を行うことが必要な場合に、運転者は、ガイダンス画面を見るだけで簡単に走行条件を整えることができる。
作業車両1は、走行可能な車体3と、車体3の操舵を行うステアリングハンドル30と、少なくとも車体3の走行条件を整える指令を表示するガイダンス画面を表示可能な表示装置45と、を備えている。これによれば、作業車両1において走行条件を整えて走行を行うことが必要な場合に、運転者は、ガイダンス画面を見るだけで簡単に走行条件を整えることができる。
表示装置45は、自動操舵の開始前にガイダンス画面を表示し、且つ、走行条件に対応した車体3の操舵方向を示す操舵指示部69をガイダンス画面に表示する。これによれば、自動操舵の開始前に走行条件を整える必要がある場合、運転者は、ガイダンス画面に表示された操舵指示部69を見るだけで、自動操舵の走行条件を整えるために操舵を行うことができる。
表示装置45は、自動操舵の開始前にガイダンス画面を表示し、且つ、走行条件に対応した車体3の操舵方向を向いたステアリングハンドル30を示すハンドル表示部68をガイダンス画面に表示する。これによれば、自動操舵の開始前に走行条件を整える必要がある場合、運転者は、ガイダンス画面のハンドル表示部68を見るだけで、当該ハンドル表示部68で示された操舵方向にステアリングハンドル30の操舵をすることによって自動操舵の走行条件を整えることができることを簡単に把握することができ、自動操舵の走行条件を整えやすい。
作業車両1は、手動操舵と自動操舵とを切り換える操舵切換スイッチ52を備え、表示装置45は、走行における走行条件が整った場合、操舵切換スイッチ52を自動操舵に切り換える指令をガイダンス画面に表示する。これによれば、運転者は、操舵切換スイッチ52を自動操舵に切り換える指令が表示された段階で、自動操舵が行なえる状態になったことを簡単に把握することができる。
表示装置45は、車体3の走行条件が整えられた後に走行が開始された場合、当該走行を維持するための条件を表示する。これによれば、車体3の走行を開始した後も、走行を維持するための条件を整えることができる。
表示装置45は、自動操舵の開始後に走行を維持するための条件として、自動操舵を維持するための条件を表示する。これによれば、車体3の自動操舵を開始した後も、自動操舵を維持するための条件を整えることができる。
表示装置45は、自動操舵の開始後に走行を維持するための条件として、自動操舵を維持するための条件を表示する。これによれば、車体3の自動操舵を開始した後も、自動操舵を維持するための条件を整えることができる。
表示装置45は、自動操舵時に車体3の運転情報をガイダンス画面に表示する。これによれば、自動操舵時における運転状況をガイダンス画面で把握することができる。
作業車両1は、車体3に設けられ、且つ測位衛星の信号に基づいて車体3の位置を検出する位置検出装置40と、位置検出装置40で検出された車体3の位置の補正を指令する補正スイッチ53と、補正スイッチ53の操作により補正された車体3の位置である補正車体位置と、走行予定ラインL2に基づいて車体3を自動操舵する自動操舵機構37とを備え、表示装置45は、補正スイッチ53による車体3の位置の補正量をガイダンス画面に表示する。これによれば、ガイダンス画面を表示させながらでも自動操舵を行うことができる。
作業車両1は、車体3に設けられ、且つ測位衛星の信号に基づいて車体3の位置を検出する位置検出装置40と、位置検出装置40で検出された車体3の位置の補正を指令する補正スイッチ53と、補正スイッチ53の操作により補正された車体3の位置である補正車体位置と、走行予定ラインL2に基づいて車体3を自動操舵する自動操舵機構37とを備え、表示装置45は、補正スイッチ53による車体3の位置の補正量をガイダンス画面に表示する。これによれば、ガイダンス画面を表示させながらでも自動操舵を行うことができる。
上述した実施形態では、位置検出装置40で検出された演算車体位置を補正した補正車体位置と、走行予定ラインに基づいて車体3を自動操舵する場合、演算車体位置を補正する補正スイッチ53によって車体3の操舵を変更することができる。即ち、補正スイッチ53は、ステアリングハンドル30とは別に車体3の操舵を行う操舵スイッチとして機能する。即ち、作業車両1は、操舵スイッチを備えている。操舵スイッチの説明は、上述した実施形態における補正スイッチ53を、操舵スイッチ53に読み替えればよく、操舵スイッチの説明を省略する。第1補正部53Aを第1操舵部、第2補正部53Bを第2操舵部に読み替えればよく、第1操舵部及び第2操舵部の説明を省略する。
つまり、作業車両1は、走行可能な車体3と、車体3の操舵を回転の操作によって行うステアリングハンドル30と、ステアリングハンドル30とは別に、車体3の操舵を行う操舵スイッチと、を備えている。したがって、運転者は、操舵スイッチを操作するだけで、ステアリングハンドル30を操作しなくても作業車両1の操舵を行うことができる。
また、操舵スイッチは、車体3の操舵を押圧の操作又はスライドの操作により行うスイッチである。これによれば、運転者が操舵スイッチを押圧の操作及びスライドの操作のいずれかを行うことにより簡単に車体3の操舵を行うことができる。
また、操舵スイッチは、車体3の操舵を押圧の操作又はスライドの操作により行うスイッチである。これによれば、運転者が操舵スイッチを押圧の操作及びスライドの操作のいずれかを行うことにより簡単に車体3の操舵を行うことができる。
操舵スイッチは、ステアリングハンドル30の周囲に設けられている。これによれば、運転者は、ステアリングハンドル30の操作から操舵スイッチによる操舵に素早く変更することができる。言い換えれば、運転者は、ステアリングハンドル30による操舵と、操舵スイッチによる操舵との両方を簡単に使い分けながら、作業車両1の走行を行うことができる。作業車両1は、ステアリングハンドル30を回転可能に支持するステアリングシャフト31を備え、操舵スイッチは、ステアリングハンドル30の周囲に設けられている。これによれば、運転者は、ステアリング30の操作から操舵スイッチによる操舵に素早く変更することができる。
操舵スイッチは、車体3を一方に操舵する第1操舵部と、車体3を他方に操舵する第2操舵部とを含んでいる。したがって、運転者は、第1操舵部を押圧の操作又はスライドすることで操作することで車体3を一方に操舵することができ、第2操舵部を押圧の操作又はスライドすることで操作することで車体3を他方に操舵することができる。
作業車両1は、車体3に設けられ、且つ測位衛星の信号に基づいて車体3の位置を検出する位置検出装置40と、位置検出装置40で検出された車体3の位置に基づいて車体3を自動操舵する自動操舵機構37と、を備え、操舵スイッチは、押圧又はスライドの操作が行われた際に位置検出装置40で検出された車体3の位置の補正を指令し、自動操舵機構は、操舵スイッチの押圧の操作又はスライドの操作により補正された車体3の位置である補正車体位置と、走行予定ラインに基づいて車体3を自動操舵する。これによれば、自動操舵機構によって自動操舵が行われている場合に、操舵スイッチを操舵することにより、簡単に自動操舵時の操舵方向を変更することができる。
作業車両1は、車体3に設けられ、且つ測位衛星の信号に基づいて車体3の位置を検出する位置検出装置40と、位置検出装置40で検出された車体3の位置に基づいて車体3を自動操舵する自動操舵機構37と、を備え、操舵スイッチは、押圧又はスライドの操作が行われた際に位置検出装置40で検出された車体3の位置の補正を指令し、自動操舵機構は、操舵スイッチの押圧の操作又はスライドの操作により補正された車体3の位置である補正車体位置と、走行予定ラインに基づいて車体3を自動操舵する。これによれば、自動操舵機構によって自動操舵が行われている場合に、操舵スイッチを操舵することにより、簡単に自動操舵時の操舵方向を変更することができる。
図19は、操舵スイッチを備えた作業車両の変形例における制御ブロック図を示す図である。なお、図19において上述した実施形態と同様の構成については説明を繰り返さない。
トラクタ1は、操舵スイッチ153を備えている。操舵スイッチ153は、押圧可能なプッシュスイッチ又はスライド可能なスライドスイッチで構成されている。以下、操舵スイッチ153がプッシュスイッチ、スライドスイッチのそれぞれである場合について説明する。
トラクタ1は、操舵スイッチ153を備えている。操舵スイッチ153は、押圧可能なプッシュスイッチ又はスライド可能なスライドスイッチで構成されている。以下、操舵スイッチ153がプッシュスイッチ、スライドスイッチのそれぞれである場合について説明する。
操舵スイッチ153がプッシュスイッチである場合、当該プッシュスイッチの操作回数に基づいて、操舵量が設定される。操舵量は、操舵量=操作回数×1回の操作回数当たりの操舵量により決定される。また、操舵スイッチ153がスライドスイッチである場合、当該スライドスイッチの操作量(変位量)に基づいて、操舵量が設定される。例えば、操舵量は、操舵量=所定位置からの変位量により決定される。なお、上述した操舵量の増加方法及び増加の割合は、上述した数値に限定されない。
操舵スイッチ153は、第1操舵部153Aと、第2操舵部153Bとを有している。第1操舵部153Aは、車体3の幅方向における一方側、即ち、左側の操舵を設定する部分である。第2操舵部153Bは、車体3の幅方向における他方側、即ち、右側の操舵を設定する部分である。
操舵スイッチ153がプッシュスイッチである場合、第1操舵部153A及び第2操舵部153Bは、操作を行う毎に自動的に復帰するON又はOFFのスイッチである。第1操舵部153Aを構成するスイッチと第2操舵部153Bを構成するスイッチとは一体化されている。なお、第1操舵部153Aを構成するスイッチと第2操舵部153Bを構成するスイッチとは互いに離間して配置されていてもよい。第1操舵部153Aを押圧する毎に、車体3の左側に対応する操舵量(左操舵量)が増加する。また、第2操舵部153Bを押圧する毎に、車体3の右側に対応する操舵量(右操舵量)が増加する。
操舵スイッチ153がプッシュスイッチである場合、第1操舵部153A及び第2操舵部153Bは、操作を行う毎に自動的に復帰するON又はOFFのスイッチである。第1操舵部153Aを構成するスイッチと第2操舵部153Bを構成するスイッチとは一体化されている。なお、第1操舵部153Aを構成するスイッチと第2操舵部153Bを構成するスイッチとは互いに離間して配置されていてもよい。第1操舵部153Aを押圧する毎に、車体3の左側に対応する操舵量(左操舵量)が増加する。また、第2操舵部153Bを押圧する毎に、車体3の右側に対応する操舵量(右操舵量)が増加する。
操舵スイッチ153がスライドスイッチである場合、第1操舵部153A及び第2操舵部153Bは、長孔の長手方向に沿って左又は右に移動する摘み部を含んでいる。操舵スイッチ153がスライドスイッチである場合、第1操舵部153Aと第2操舵部153Bとは互いに幅方向に離間して配置されている。摘み部を予め定められた基準位置から徐々に左側へ変位させると、変位量に応じて左操舵量が増加する。また、摘み部を予め定められた基準位置から徐々に右側へ変位させると、変位量に応じて右操舵量が増加する。なお、スライドスイッチである場合、第1操舵部153Aと第2操舵部153Bとを一体化に形成し、摘み部の基準位置を中央部に設定し、基準位置から左側に移動した場合に左操舵量が設定され、摘み部を中間位置から右側に移動した場合に右操舵量が設定される構成としてもよい。
トラクタ1は、操舵機構137は、操舵スイッチ153の操舵に基づいてステアリングシャフト31の回転(回動)を行う機構である。操舵機構137は、ステアリングモータ38とギア機構39とを備えている。ステアリングモータ38及びギア機構39は、上述した実施形態と同様である。
第4制御装置60Dを備えている。第4制御装置60Dは、操舵スイッチ153の操作に基づいて、ステアリングモータ38を制御する。第4制御装置60Dは、第1操舵部153Aが操作されると、当該第1操舵部153Aで設定された左操舵量に対応して、ステアリングシャフト31の回動量(回転角)を設定して、トラクタ1の操舵方向が左方向となるようにステアリングモータ38の回転軸を回転させる。第4制御装置60Dは、第2操舵部153Bが操作されると、当該第2操舵部153Bで設定された右操舵量に対応して、ステアリングシャフト31の回動量(回転角)を設定して、トラクタ1の操舵方向が右方向となるようにステアリングモータ38の回転軸を回転させる。このように、操舵スイッチ153を操作することによって、トラクタ1を左又は右に操舵することができる。なお、上述した変形例では、操舵機構137によってステアリングモータ38を回動していたが、これに代えて、制御弁34をスプールの移動量を設定可能な電磁弁付き制御弁等で構成し、第4制御装置60Dは、左操舵量又は右操舵量に応じて、制御弁34の切換位置及び開度を制御することでトラクタ1の操舵を行ってもよい。
第4制御装置60Dを備えている。第4制御装置60Dは、操舵スイッチ153の操作に基づいて、ステアリングモータ38を制御する。第4制御装置60Dは、第1操舵部153Aが操作されると、当該第1操舵部153Aで設定された左操舵量に対応して、ステアリングシャフト31の回動量(回転角)を設定して、トラクタ1の操舵方向が左方向となるようにステアリングモータ38の回転軸を回転させる。第4制御装置60Dは、第2操舵部153Bが操作されると、当該第2操舵部153Bで設定された右操舵量に対応して、ステアリングシャフト31の回動量(回転角)を設定して、トラクタ1の操舵方向が右方向となるようにステアリングモータ38の回転軸を回転させる。このように、操舵スイッチ153を操作することによって、トラクタ1を左又は右に操舵することができる。なお、上述した変形例では、操舵機構137によってステアリングモータ38を回動していたが、これに代えて、制御弁34をスプールの移動量を設定可能な電磁弁付き制御弁等で構成し、第4制御装置60Dは、左操舵量又は右操舵量に応じて、制御弁34の切換位置及び開度を制御することでトラクタ1の操舵を行ってもよい。
次に、第2実施形態について説明する。
さて、図18、図21~図23に示すように、補正スイッチ53は、操作台150に装着された状態で操作可能な第1状態301と、操作台150から取り外された状態で操作可能な第2状態302とに位置変更可能である。図23及び図24には、操作台150のパネルカバー178の上板部178a、即ち、補正スイッチ53が装着される取付面178fには、凹部310が形成されている。凹部310の内周面310aには、凸状の係止部310bが形成されている。この凹部310に補正スイッチ53が着脱自在に取り付けられる。補正スイッチ53が凹部310には嵌りこんだ状態が第1状態301であり、補正スイッチ53が凹部310から嵌りこんだ状態から取り外された状態が第2状態302である。
さて、図18、図21~図23に示すように、補正スイッチ53は、操作台150に装着された状態で操作可能な第1状態301と、操作台150から取り外された状態で操作可能な第2状態302とに位置変更可能である。図23及び図24には、操作台150のパネルカバー178の上板部178a、即ち、補正スイッチ53が装着される取付面178fには、凹部310が形成されている。凹部310の内周面310aには、凸状の係止部310bが形成されている。この凹部310に補正スイッチ53が着脱自在に取り付けられる。補正スイッチ53が凹部310には嵌りこんだ状態が第1状態301であり、補正スイッチ53が凹部310から嵌りこんだ状態から取り外された状態が第2状態302である。
補正スイッチ53は、操作部253Aと、コード部253Bとを有している。操作部253Aは、第1状態301では操作台150に装着され且つ第2状態302では操作台150から取り外される部分である。操作部253Aは、押圧部330と、押圧部330に連結された取付部331とを含んでいる。押圧部330は、第1補正部53A及び第2補正部53Bを一体的に形成した部分であって、幅方向一方側に第1補正部53Aが設けられ、幅方向他方側に第2補正部53Bが設けられている。押圧部330は、例えば、第1補正部53Aを押圧すると押圧された一方向に揺動し、第2補正部53Bを押圧すると押圧された他方向に揺動する。
取付部331は、押圧部330を揺動自在に支持すると共に、パネルカバー178の凹部310に嵌りこむ部分である。取付部331には、押圧部330の操作を電気信号に変換する電子回路、電気回路の基板が格納されている。また、取付部331の外周面331aには、凹状の係止部331bが形成されている。
したがって、取付部331を凹部310に近づけて、当該取付部331を凹部310に挿入すると、取付部331の係止部331bと、凹部310の係止部310bとが掛止されて、取付部331は凹部310内で保持される。また、取付部331を凹部310に装着した状態で、押圧部330等を介して当該取付部331を離脱する方向に引っ張ると、係止部331b及び係止部310bの弾性変形等によって、係止部331bと係止部310bとの係止が解除される。
したがって、取付部331を凹部310に近づけて、当該取付部331を凹部310に挿入すると、取付部331の係止部331bと、凹部310の係止部310bとが掛止されて、取付部331は凹部310内で保持される。また、取付部331を凹部310に装着した状態で、押圧部330等を介して当該取付部331を離脱する方向に引っ張ると、係止部331b及び係止部310bの弾性変形等によって、係止部331bと係止部310bとの係止が解除される。
コード部253Bは、操作部253Aに接続された電気線を含んでいて、第1状態301では操作台150内に収容され且つ第2状態302では操作部253Aと共に移動する部分である。コード部253Bの長手方向の一端は、取付部331に接続されていて、当該取付部331に内蔵された基板に接続されている。コード部253Bの長手方向の他端は、第1制御装置60Aに接続されている。なお、コード部253Bの長手方向の他端は、第2制御装置60B、或いは、その他の装置に接続されていてもよい。コード部253Bは、凹部310に形成された貫通孔310cを通過していて、パネルカバー178の内部に至っている。
したがって、操作部253A(取付部331)を操作台150(凹部310)に近づける、即ち、装着方向へ移動させると、コード部253Bはパネルカバー178に入り、当該パネルカバー178内に収容される。また、操作部253A(取付部331)を凹部310から離脱方向へ移動させると、パネルカバー178内に収容されたコード部253Bの一部が取付部331の移動と共に外部へ延びる。
図21及び図22に示すように、操作部253A(取付部331)を操作台150(凹部310)から離脱させて、当該操作部253A(取付部331)を運転席10側へ移動させた場合、当該操作部253A(取付部331)が少なくとも運転席10の座部10aの側方に位置できるような長さにコード部253Bの長さが設定されている。なお、操作部253A(取付部331)を操作台150(凹部310)から離脱させて、当該操作部253A(取付部331)を運転席10側へ移動させた場合、操作部253A(取付部331)を運転席10のせもたれ部10bの側方又は後方に位置するように、コード部253Bの長さを設定してもよい。
以上によれば、図22に示すように、トラクタ1の自動操舵を行っている状況下において、作業者が補正スイッチ53を操作台150から取り外し、取り外した補正スイッチ53を運転席10の後側まで移動させることができる。そして、作業者は、車体3の後方を見ながら、補正スイッチ53を操作することにより、トラクタ1の操舵を行うことができる。
図25は、補正スイッチ53の変形例を示している。図25に示すように、補正スイッチ53は、操作部253Cと、コード部253Bとを有している。操作部253Cは、操作部253Aと同様に押圧部330と押圧部330に連結された取付部331と含んでいる。操作部253Cの取付部331は、高さ方向に長く形成されていて、作業者(運転者)が把持する把持部(グリップ部)と兼用されている。操作部253Cの取付部331を凹部310に嵌め込んだ状態では、少なくとも押圧部330が取付面178fよりも上方に突出する。また、操作部253Cの取付部331を凹部310から離脱させると、当該取付部331の外周面を作業者が把持することができる。したがって、図25の変形例では、把持部が兼用化された取付部331を持ちながら簡単に操作を行うことができる。
図18に示すように、補正スイッチ53は、操作を推奨することを報知する報知部153Cを有していてもよい。報知部153Cは、発光するLED、音を出力するスピーカ、振動を発生させるバイブレータ等であり、押圧部330又は取付部331に内蔵されている。報知部153Cは、コード部253Bを介して第1制御装置60Aに接続されている。第1制御装置60Aは、例えば、測位衛星から送信された衛星信号を受信する受信感度の低下、測位衛星のDOP(Dilution of Precision)の増加した場合などに、報知部153Cに操作を推奨することを報知する指令信号を出力する。報知部153Cは、指令信号を取得すると、発光、音声、振動等によって操作することを報知する。つまり、自動操舵を行っている状況下において、測位誤差が発生しやすくなった場合に、報知部153Cにより補正スイッチ53にて操作を促すことができる。
上述した実施形態では、操作部材として、補正スイッチ53を例にあげ説明したが、当該操作部材は補正スイッチ53以外であってもよい。例えば、操作部材は、作業装置を昇降する連結部(昇降装置)の昇降を行うポンパスイッチ、PTOの回転数を変更するPTO切換スイッチ、昇降装置の昇降の高さを制限する上昇高さ制限スイッチ等であってもよく、限定されない。
作業車両1は、運転席10と、運転席10の前方又は側方に設けられた操作台150と、を備え、操作部材は、操作台150に装着された状態で操作可能な第1状態301と、操作台150から取り外された状態で操作可能な第2状態302とに位置変更可能である。これによれば、操作部材を操作台150に装着した第1状態301で操作できるだけでなく、操作部材を操作台150から取り外した第2状態302で操作することができる。例えば、作業者(運転者)が運転席10に座った状態で後ろを見ながら操作部材の操作を行うことができる。
操作部材は、第1状態301では操作台150に装着され且つ第2状態302では操作台150から取り外される操作部253Aと、操作部253Aに接続されたコード部253Bであって、第1状態301では操作台150内に収容され且つ第2状態302では操作部253Aと共に移動するコード部253Bと、を有している。これによれば、操作台150から操作部253Aを取り外し、取り外した操作部253Aをコード部253Bと共に所定の位置に移動させることができる。
操作部253Aは、第2状態302では運転席10の側方又は後方に位置する。これによれば、操作部253Aが運転席10の側方又は後方に位置させることができるため、作業者が運転席10に座った状態で簡単に操作を行うことができる。
操作台150は、操作部253Aが装着される凹部310と、操作部253Aを凹部310に装着した場合にコード部253Bを収容するカバー(パネルカバー)178とを有している。これによれば、操作部253Aを簡単に凹部310を介して操作台150に装着することができ、コード部253Bは収容されるため、操作部材をコンパクトに操作台150に収めることができる。
操作台150は、操作部253Aが装着される凹部310と、操作部253Aを凹部310に装着した場合にコード部253Bを収容するカバー(パネルカバー)178とを有している。これによれば、操作部253Aを簡単に凹部310を介して操作台150に装着することができ、コード部253Bは収容されるため、操作部材をコンパクトに操作台150に収めることができる。
操作部材は、操作を推奨することを報知する報知部153Cを有している。これによれば、作業者が操作のタイミングを報知部153Cによって簡単に把握することができる。
作業車両1は、車体3と、車体3の操舵を行うステアリングハンドル30と、を備え、操作部材は、ステアリングハンドル30とは別に車体3の操舵を行う。これによれば、操作部材によって簡単に車体3の操舵を行うことができる。
作業車両1は、車体3と、車体3の操舵を行うステアリングハンドル30と、を備え、操作部材は、ステアリングハンドル30とは別に車体3の操舵を行う。これによれば、操作部材によって簡単に車体3の操舵を行うことができる。
作業車両1は、車体3と、車体3の操舵を行うステアリングハンドル30と、車体3に設けられ、且つ測位衛星の信号に基づいて車体3の位置を検出可能な測位装置40と、を備え、操作部材は、測位装置40で検出された車体3の位置の補正を指令する補正スイッチ53である。これによれば、補正スイッチ53によって、測位装置40によって検出した車体3の位置を簡単に補正することができる。
作業車両1は、補正スイッチ53の操作により補正された車体3の位置である補正位置と走行予定ラインL2とに基づいて車体3を操舵する操舵装置11を備えている。これによれば、補正スイッチ53で補正した補正位置を用いて、車体3を走行予定ラインL2に沿って走行させることができる。
この第2実施形態のその他の構成は、第1実施形態と同様に構成される。
この第2実施形態のその他の構成は、第1実施形態と同様に構成される。
次に、第3実施形態について説明する。
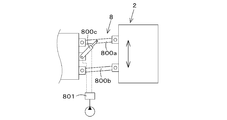
図26に示すように、連結部8に連結される作業装置2は、機体幅方向に位置変更可能である。連結部8は、車体3の後部に機体幅方向に揺動自在に連結された第1揺動部800aと、車体3の後部に機体幅方向に揺動自在に連結され且つ第1揺動部800aに離間して設けられた第2揺動部800bと、少なくとも一端が車体3に連結され且つ他端が第1揺動部800a及び第2揺動部800bのいずれかに連結された油圧アクチュエータ800cとを含んでいる。第1揺動部800aの後部には作業装置2の前部が揺動自在に連結され、第2揺動部800bの後部には作業装置2の前部が揺動自在に連結されている。
図26に示すように、連結部8に連結される作業装置2は、機体幅方向に位置変更可能である。連結部8は、車体3の後部に機体幅方向に揺動自在に連結された第1揺動部800aと、車体3の後部に機体幅方向に揺動自在に連結され且つ第1揺動部800aに離間して設けられた第2揺動部800bと、少なくとも一端が車体3に連結され且つ他端が第1揺動部800a及び第2揺動部800bのいずれかに連結された油圧アクチュエータ800cとを含んでいる。第1揺動部800aの後部には作業装置2の前部が揺動自在に連結され、第2揺動部800bの後部には作業装置2の前部が揺動自在に連結されている。
油圧アクチュエータ800cは、例えば、油圧によって伸縮する油圧シリンダである。油圧アクチュエータ800の作動、即ち、油圧シリンダの伸縮は、切換弁801で行うことができる。切換弁801が一方に切り換わると、油圧シリンダは伸長し、他方に切り換わると、油圧シリンダは収縮する。油圧シリンダの伸縮によって、第1揺動部800a及び第2揺動部800bは、機体幅方向の一方(例えば、左側)、機体幅方向の他方(例えば、右側)に位置変更することが可能である。なお、上述した実施形態では、第1揺動部800a及び第2揺動部800bの揺動によって作業装置2を機体幅方向に位置変更していたが、これに限定されず。作業装置2をレール等に沿って移動させるスライド機構で連結部8を構成し、スライド機構による動作によって作業装置2を機体幅方向に位置変更してもよい。
測位装置40は、慣性計測装置42で検出した測定情報を用いて車体3(トラクタ1)の位置を補正する。図27に示すように、測位装置40は、衛星信号を衛星航法(GNSS)に適用して測位の情報である第1測位情報として、位置、速度、方位を演算する。測位装置40は、慣性計測装置42が検出した測定情報(加速度、角速度)を慣性法(INS)に適用して測位の情報である第2測位情報として、位置、速度、方位を演算する。また、測位装置40は、衛星航法(GNSS)で求めた第1測位情報(位置、速度、方位)、及び、慣性航法(INS)で求めた第2測位情報(位置、速度、方位)をカルマンフィルタに適用して測位の情報である第3測位情報を演算する。即ち、測位装置40は、ハイブリッド航法(複合航法)によって、第3測位情報である位置、速度、方位を演算する。つまり、測位装置40は、測定情報(加速度、角速度)で得られた第2観測情報によって、衛星航法(GNSS)によって求めた第1観測情報を補正した第3観測情報を、車体3(トラクタ1)の位置としている。なお、ハイブリッド航法(複合航法)のパラメータ設定は、直進における精度を重視した設定である。また、カルマンフィルタは、多くの文献で示されており、例えば、特開2004-239643号公報等で開示されている。
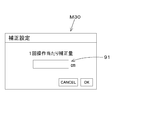
図28Aに示すように、表示装置45に対して所定の動作を行うと、第1制御装置60Aは、表示装置45に補正量を設定する設定画面M30を表示する。設定画面M30では、プッシュスイッチの1回の操作当たりの補正量(単位当たりの補正量)を入力する設定入力部91が表示される。設定入力部91の単位当たりの補正量は、表示装置45を操作することによって入力することができる。表示装置45の設定入力部91に入力した単位当たりの補正量は、第1制御装置60Aに記憶することができる。つまり、設定入力部91に単位当たりの補正量を入力することによって、例えば、図3Aで示した単位当たりの補正量を2cmから4cmに変更することができる。
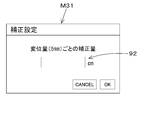
図28Bに示すように、表示装置45に対して所定の動作を行うと、第1制御装置60Aは、表示装置45に補正量を設定する設定画面M31を表示する。設定画面M31では、スライドスイッチの所定の操作、即ち、スライドスイッチの変位量に対する補正量(単位当たりの補正量)を入力する設定入力部92が表示される。設定入力部92の単位当たりの補正量は、表示装置45を操作することによって入力することができ、入力した単位当たりの補正量は、第1制御装置60Aに記憶することができる。つまり、設定入力部92に単位当たりの補正量を入力することによって、例えば、図3Bで示したように変位量が5mm増加毎での補正量(単位当たりの補正量)を2cmから4cmに変更することができる。
図29は、操舵切換スイッチ52、第2制御装置60B、ステアリングモータ38の関係を示した図である。図29に示すように、第2制御装置60Bの電源供給ラインL50には、複数の遮断スイッチ77が接続されている。複数の遮断スイッチ77は、第1遮断スイッチ77aと、第2遮断スイッチ77bとを含んでいる。第1遮断スイッチ77a及び第2遮断スイッチ77bは、電源供給ラインL50を遮断する遮断位置78と、電源供給ラインL50を通電する通電位置79とに切り換え可能である。第1遮断スイッチ77a及び第2遮断スイッチ77bは、例えば、ON/OFFに切り換わるリレーであって、ONである場合には通電位置79に切り換わり、OFFである場合には遮断位置78に切り換わる。
第1遮断スイッチ77a及び第2遮断スイッチ77bには、操舵切換スイッチ52が接続されている。操舵切換スイッチ52は、切換部52aと、入力端子52b、出力端子52cとを含んでいる。切換部52aは、少なくとも第1位置(開始位置、終了位置)と第2位置(中立位置)とに切り換わる部分であって、例えば、押圧によって第1位置に切り換わった後に第2位置に自動で復帰するスイッチである。切換部52aが第1位置(開始位置、終了位置)である場合には入力端子52bと出力端子52cとの接続を行い、第2位置(中立位置)である場合には入力端子52bと出力端子52cとの接続を解除する。入力端子52bは、電源供給ラインL50に接続され、出力端子52cは、出力ラインL51を介して第1遮断スイッチ77a及び第2遮断スイッチ77bのコイル端子に接続されている。なお、出力ラインL51は分岐していて、分岐した出力ラインL52は表示装置45に接続されている。
自動操舵が終了している状態において、操舵切換スイッチ52の切換部52aを第2位置から第1位置にした場合、当該操舵切換スイッチ52は、自動操舵の開始の指令を行うことになる。操舵切換スイッチ52の自動操舵の開始の指令、即ち、切換部52aを第1位置にした場合、当該切換部52aによって入力端子52bと出力端子52cとが接続される。その結果、第1遮断スイッチ77a及び第2遮断スイッチ77bのコイルが励磁されて、当該第1遮断スイッチ77a及び第2遮断スイッチ77bは、通電位置79に切り換わり、通電位置79が保持される。
一方、自動操舵の開始の指令が行われている状態において、再び、第2位置から第1位置にした場合、当該操舵切換スイッチ52は、自動操舵の終了の指令を行うことになる。操舵切換スイッチ52の自動操舵の終了の指令、即ち、再び切換部52aを第1位置にした場合、当該切換部52aによって入力端子52bと出力端子52cとが接続される。その結果、第1遮断スイッチ77a及び第2遮断スイッチ77bのコイルが励磁されて、当該第1遮断スイッチ77a及び第2遮断スイッチ77bは、通電位置79から遮断位置78に切り換わり、遮断位置78が保持される。
つまり、第1遮断スイッチ77a及び第2遮断スイッチ77bは、操舵切換スイッチ52が自動操舵の開始の指令が行われた場合には通電位置79に切り換わり、操舵切換スイッチ52が自動操舵の開始の指令から終了の指令を行った場合には遮断位置78に切り換わる。
さて、自動操舵制御部200は、トラクタ1が走行予定ラインL2から外れている状況下で、自動操舵によってトラクタ1が走行予定ラインL2に近づく方向に操舵装置11の操舵角を設定してもトラクタ1が走行予定ラインL2に近づかない場合、前輪7F及び/又は後輪7Rに関する制動制御を行う。
さて、自動操舵制御部200は、トラクタ1が走行予定ラインL2から外れている状況下で、自動操舵によってトラクタ1が走行予定ラインL2に近づく方向に操舵装置11の操舵角を設定してもトラクタ1が走行予定ラインL2に近づかない場合、前輪7F及び/又は後輪7Rに関する制動制御を行う。
制動制御では、例えば、幅方向に並ぶ2つの後輪(第1輪)7R、後輪(第2輪)7Rのうちいずれか1つの制動を行う。また、制動制御では、例えば、幅方向に並ぶ2つの前輪(第1輪)7F、前輪(第2輪)7Fのうちいずれか1つの制動を行う。
以下、制動制御について、後輪7Rの制動を例にとり説明する。
図30に示すように、自動操舵制御部200は、自動操舵の開始後、トラクタ1が走行予定ラインL2に戻るように操舵装置11の操舵角を設定した場合、トラクタ1が走行予定ラインL2に戻ったか否かを確認する(S21)。自動操舵時にトラクタ1が走行予定ラインL2に戻らない場合、即ち、トラクタ1が走行予定ラインL2に近づかない場合(S21、No)、自動操舵制御部200は、制動制御を実行する(S22)。
以下、制動制御について、後輪7Rの制動を例にとり説明する。
図30に示すように、自動操舵制御部200は、自動操舵の開始後、トラクタ1が走行予定ラインL2に戻るように操舵装置11の操舵角を設定した場合、トラクタ1が走行予定ラインL2に戻ったか否かを確認する(S21)。自動操舵時にトラクタ1が走行予定ラインL2に戻らない場合、即ち、トラクタ1が走行予定ラインL2に近づかない場合(S21、No)、自動操舵制御部200は、制動制御を実行する(S22)。
例えば、自動操舵制御部200が、偏差(位置偏差、方位偏差)を解消するように、操舵角を設定した場合において、車体位置が操舵した方向に推移しない場合、当該自動操舵制御部200は、第1輪及び第2輪のいずれかのうち、自動操舵によって操舵を行った操舵方向に対応する輪の制動を実行する。具体的には、図31Aに示すように、自動操舵制御部200が位置P1にて前輪7Fを右に操舵後、所定時間経過してもトラクタ1と走行予定ラインL2との位置偏差が閾値未満にならない場合、当該自動操舵制御部200は制動制御により、右制動弁49bに制御信号を出力し、右制動装置46bの制動によって右の後輪7Rの回転速度を低下させる。
図31Aと同じように、自動操舵制御部200が位置P1にて前輪7Fを左に操舵後、所定時間経過してもトラクタ1と走行予定ラインL2との位置偏差が閾値未満にならない場合、当該自動操舵制御部200は制動制御により、左制動弁49aに制御信号を出力し、左制動装置46aの制動によって左の後輪7Rの回転速度を低下させる。
以上によれば、自動操舵の際にトラクタ1が走行予定ラインL2に近づかない場合に、自動操舵制御部200は、第1輪及び第2輪のうち、操舵方向に対応する輪の制動を実行する。
以上によれば、自動操舵の際にトラクタ1が走行予定ラインL2に近づかない場合に、自動操舵制御部200は、第1輪及び第2輪のうち、操舵方向に対応する輪の制動を実行する。
次に、自動操舵制御部200は、制動制御後、位置偏差が閾値未満になったか否かを判断し(S23)、位置偏差が閾値未満である場合(S23、Yes)、制動制御を終了する(S24)。
なお、自動操舵制御部200は、走行予定ラインL2で示された方位とトラクタ1の走行方位とが異なる場合に左の後輪7R、右の後輪7Rのいずれかの制動の設定を行ってもよい。例えば、図31Bに示すように、自動操舵制御部200が位置P2にて前輪7Fを右に操舵後、所定時間経過してもトラクタ1と走行予定ラインL2との方位偏差が閾値未満にならない場合、自動操舵制御部200は制動制御により、右制動弁49bのいずれかに制御信号を出力し、右制動装置46bの制動によって右の後輪7Rの回転速度を低下させる。
なお、自動操舵制御部200は、走行予定ラインL2で示された方位とトラクタ1の走行方位とが異なる場合に左の後輪7R、右の後輪7Rのいずれかの制動の設定を行ってもよい。例えば、図31Bに示すように、自動操舵制御部200が位置P2にて前輪7Fを右に操舵後、所定時間経過してもトラクタ1と走行予定ラインL2との方位偏差が閾値未満にならない場合、自動操舵制御部200は制動制御により、右制動弁49bのいずれかに制御信号を出力し、右制動装置46bの制動によって右の後輪7Rの回転速度を低下させる。
図31Bと同じように、自動操舵制御部200が位置P4にて前輪7Fを左に操舵後、所定時間経過してもトラクタ1と走行予定ラインL2との方位偏差が閾値未満にならない場合、自動操舵制御部200は制動制御により、左制動弁49aに制御信号を出力し、左制動装置46aの制動によって左の後輪7Rの回転速度を低下させる。
以上のように、自動操舵によって操舵装置11の操舵角を変更したとしても、トラクタ1が走行予定ラインL2に近づかない場合であっても、自動操舵制御部200によって、片ブレーキをしているのでトラクタ1の向きを変更し、トラクタ1を走行予定ラインL2に近づけることができる。例えば、圃場がぬかるんでいたり、圃場が傾斜しているなどでは、自動操舵によって、トラクタ1の向きが変更できない場合があるが、上述したように、片ブレーキをすることで、トラクタ1の向きを変更することができる。なお、位置偏差が閾値以上で且つ方位偏差θが閾値以上である場合、即ち、位置偏差及び方位偏差の両方が閾値以上である場合に、自動操舵制御部200によって制動制御を行ってもよい。
以上のように、自動操舵によって操舵装置11の操舵角を変更したとしても、トラクタ1が走行予定ラインL2に近づかない場合であっても、自動操舵制御部200によって、片ブレーキをしているのでトラクタ1の向きを変更し、トラクタ1を走行予定ラインL2に近づけることができる。例えば、圃場がぬかるんでいたり、圃場が傾斜しているなどでは、自動操舵によって、トラクタ1の向きが変更できない場合があるが、上述したように、片ブレーキをすることで、トラクタ1の向きを変更することができる。なお、位置偏差が閾値以上で且つ方位偏差θが閾値以上である場合、即ち、位置偏差及び方位偏差の両方が閾値以上である場合に、自動操舵制御部200によって制動制御を行ってもよい。
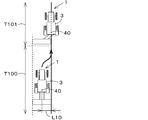
さて、自動操舵制御部200を行っている場合に、トラクタ1の車体位置と走行予定ラインL2とに基づいて作業装置2の位置を機体幅方向に変更してもよい。図32Aに示すように、第3制御装置60Cは、トラクタ1と走行予定ラインL2との位置偏差が閾値L10以上である場合、作業装置2を走行予定ラインL2側に位置変更をする。例えば、第3制御装置60Cは、自動操舵制御部200から位置偏差を取得し、位置偏差の推移を監視する。第3制御装置60Cは、位置偏差を監視している状況下において、トラクタ1が所定距離を進んでも位置偏差が減少する方向に推移しない場合、例えば、位置偏差がL10の状態でトラクタ1が進む場合、切換弁801に制御信号を出力することによって、作業装置2を機体幅方向に位置偏差L10と同じ距離だけ走行予定ラインL2側にシフトさせる。これによれば、トラクタ1が走行予定ラインL2とズレて走行している場合に、作業装置2を走行予定ラインL2上に移動させることができ、当該作業装置2の作業位置を走行予定ラインL2上に位置させることができる。
なお、図32Aでは、トラクタ1と走行予定ラインL2との位置偏差が閾値以上である場合に、作業装置2の位置を走行予定ラインL2側に変更をしていたが、これに代えて、自動操舵において、位置偏差があった状態から位置偏差が解消される状態に変化する場合に、位置偏差が解消される方向とは逆方向に作業装置2を移動させてもよい。
図32Bに示すように、ズレ区間T100では、トラクタ1と走行予定ラインL2との位置偏差がL10であったとする。ズレ区間T100において、自動操舵によってトラクタ1が走行予定ラインL2に徐々に近づいた場合、トラクタ1が走行予定ラインL2に近づくにつれて、第3制御装置60Cは、作業装置2を走行予定ラインL2に離れる方向に移動させる。つまり、ズレ区間T100において、切換弁801に制御信号を出力することによって、第3制御装置60Cは、作業装置2の幅方向中央部と走行予定ラインL2との距離が、位置偏差であるL10と同じとなるように、作業装置2の位置を変更する。また、トラクタ1と走行予定ラインL2との位置偏差が零、即ち、走行予定ラインL2上にトラクタ1が達したズレ解消区間T101においても、走行予定ラインL2と作業装置2の幅方向中心部との距離がズレ区間T100と同じ位置になるように、作業装置2の位置を変更する。これによれば、トラクタ1が位置偏差のために、走行予定ラインL2に近づいた場合において、作業装置2の位置を一定に維持することができる。
図32Bに示すように、ズレ区間T100では、トラクタ1と走行予定ラインL2との位置偏差がL10であったとする。ズレ区間T100において、自動操舵によってトラクタ1が走行予定ラインL2に徐々に近づいた場合、トラクタ1が走行予定ラインL2に近づくにつれて、第3制御装置60Cは、作業装置2を走行予定ラインL2に離れる方向に移動させる。つまり、ズレ区間T100において、切換弁801に制御信号を出力することによって、第3制御装置60Cは、作業装置2の幅方向中央部と走行予定ラインL2との距離が、位置偏差であるL10と同じとなるように、作業装置2の位置を変更する。また、トラクタ1と走行予定ラインL2との位置偏差が零、即ち、走行予定ラインL2上にトラクタ1が達したズレ解消区間T101においても、走行予定ラインL2と作業装置2の幅方向中心部との距離がズレ区間T100と同じ位置になるように、作業装置2の位置を変更する。これによれば、トラクタ1が位置偏差のために、走行予定ラインL2に近づいた場合において、作業装置2の位置を一定に維持することができる。
さて、上述したように、車体位置(演算車体位置W1、補正車体位置W3)を演算するに際して、慣性計測装置42が検出した測定情報(加速度、角速度)を用いているが、慣性計測装置42が検出した測定情報には、バイアス誤差の積算値(ドリフト量)が増加することがある。表示装置45は、ドリフト量が所定以上となった場合に、当該ドリフト量が所定以上となったことを表示する。例えば、第1制御装置60Aは、慣性計測装置42のドリフト量を監視し、ドリフト量が所定以上となった場合に、図33に示すように、表示装置45の運転画面M1等にドリフト量が所定以上になった旨、即ち、慣性計測装置42をリセットすることを、例えば、「IMUをリセットしてください」で示す。
上述したように、運転画面M1にドリフト量が所定以上になったことが示された場合、慣性計測装置42のドリフト量をリセットすることができる。例えば、第1制御装置60Aなどの制御装置60には、慣性計測装置42をリセットするリセットスイッチ195が接続されている(図1参照)。リセットスイッチ195は、運転席10の周囲に設けられている。なお、表示装置45の運転画面M1にリセットスイッチ195を表示してもよい。第1制御装置60Aは、ドリフト量が所定以上である場合に、リセットスイッチ195の操作を受付け、リセットスイッチ195の操作を取得した場合には、慣性計測装置42を初期化(リセット)することでドリフト量を初期化する。なお、第1制御装置60Aは、ドリフト量が所定以上でない場合は、リセットスイッチ195が操作されても、当該慣性計測装置42を初期化しないようにすることが好ましい。また、第1制御装置60Aは、操舵切換スイッチ52の操作によって自動操舵が終了し且つリセットスイッチ195が操作された場合に慣性計測装置42を初期化することが好ましい。
作業車両1は、車体3と、車体3の操舵を行うステアリングハンドル30と、車体3に設けられ且つ測位衛星の信号に基づいて車体3の位置を検出する測位装置40と、測位装置40で検出された車体3の位置に基づいて、ステアリングハンドル30による手動操舵とは別に車体3の操舵を自動操舵する自動操舵機構37と、測位装置40で検出された車体3の位置の補正量を設定可能な補正スイッチ53と、自動操舵機構37の自動操舵を制御し且つ補正スイッチ53の所定の操作における補正量を変更可能な制御装置60(第1制御装置60A)と、を備えている。これによれば、補正スイッチ53を操作することによって測位装置40で検出した車体3の位置を簡単に補正することができる。また、補正スイッチ53の補正量を変更することで、当該補正スイッチ53の操作によって補正される車体3の位置の調整を行うことができる。例えば、補正スイッチ53の操作の1回当たりの補正量、操作量の当たりの補正量を任意に変更することができる。
自動操舵機構37は、補正量に基づいて補正された車体3の位置である補正車体位置W3と走行予定ラインL2とに基づいて車体を自動操舵する。これによれば、例えば、測位衛星の測位誤差が生じた場合であっても、補正車体位置W3によって走行予定ラインL2に沿ってトラクタ1を走行させることができる。
車体3の幅方向の一方側に設けられた第1車輪と、車体3の幅方向の他方側に設けられた第2車輪とを有する走行装置7と、第1車輪及び第2車輪のいずれかの制動が可能な制動装置(左制動装置46a、右制動装置46b)と、を備え、制動装置(左制動装置46a、右制動装置46b)は、車体3の位置と走行予定ラインL2との偏差が所定以上である場合に偏差を解消すべく、第1車輪及び第2車輪のいずれかの制動を行う。これによれば、自動操舵時にトラクタ1(車体3)の操舵を行ったとしても当該トラクタ1が走行予定ラインL2に近づかない(偏差が解消できない)場合でも、制動装置の制動によって、トラクタ1を走行予定ラインL2に近づけることができる。
車体3の幅方向の一方側に設けられた第1車輪と、車体3の幅方向の他方側に設けられた第2車輪とを有する走行装置7と、第1車輪及び第2車輪のいずれかの制動が可能な制動装置(左制動装置46a、右制動装置46b)と、を備え、制動装置(左制動装置46a、右制動装置46b)は、車体3の位置と走行予定ラインL2との偏差が所定以上である場合に偏差を解消すべく、第1車輪及び第2車輪のいずれかの制動を行う。これによれば、自動操舵時にトラクタ1(車体3)の操舵を行ったとしても当該トラクタ1が走行予定ラインL2に近づかない(偏差が解消できない)場合でも、制動装置の制動によって、トラクタ1を走行予定ラインL2に近づけることができる。
測位装置40は、車体3の慣性を検出し且つ検出した慣性に基づいて車体3の位置を補正する慣性計測装置42と、慣性計測装置42のドリフト量が所定以上になったことを表示する表示装置と、慣性計測装置42をリセットするリセットスイッチ195と、を備えている。これによれば、慣性計測装置42によるドリフト量が増加していることを作業者等が簡単に把握することができ、リセットスイッチ195を操作することでドリフト量を初期化することができる。
作業車両1は、車体3に設けられ且つ作業幅を変更可能な作業装置2を備え、作業装置2は、車体3の位置と走行予定ラインL2との偏差に基づいて、当該作業装置2の位置を変更する。これによれば、例えば、偏差が大きく車体3が走行予定ラインL2から離れた場合に、作業装置2の位置を走行予定ラインL2に近づけることにより、車体3が走行予定ラインL2から離れていても作業装置2による作業位置を走行予定ラインL2上にすることができる。一方で、例えば、偏差が大きく車体3が走行予定ラインL2から離れている状況から車体3が走行予定ラインL2に近づいた場合は、作業装置2の位置を走行予定ラインL2に近づく前の状態に維持することができる。
作業車両1は、自動操舵の開始及び終了の指令を行う操舵切換スイッチ52を備え、自動操舵機構37は、ステアリングハンドル30を支持するステアリングポストを回転可能なステアリングモータ38と、ステアリングモータ38の回転を制御することで自動操舵を行う制御装置60(第2制御装置60B)の電源供給ラインL50に接続され、電源供給ラインL50を遮断する遮断位置78と電源供給ラインL50を通電する通電位置79とに切り換え可能な遮断スイッチ77と、を有し、遮断スイッチ77は、操舵切換スイッチ52が自動操舵の開始の指令が行われた場合には通電位置79に切り換わり、操舵切換スイッチ52が自動操舵の開始の指令から終了の指令を行った場合には遮断位置78に切り換わる。これによれば、操舵切換スイッチ52によって自動操舵を開始から終了に切り換えた場合に、自動操舵の制御を行う制御装置60(第2制御装置60B)に電力が供給されなくなるため、操舵切換スイッチ52の切換に応じて確実に自動操舵を停止させることができる。
作業車両1は、自動操舵の開始及び終了のいずれかを切り換える操舵切換スイッチ52を備え、制御装置60(第1制御装置60A)は、操舵切換スイッチ52により自動操舵の開始の切換が行われた場合に操舵装置による自動操舵を開始する。これによれば、操舵切換スイッチ52の操作によって簡単に自動操舵を行うことができる。
作業車両1は、車体の位置を検出可能な測位装置40と、測位装置40で検出された車体の位置を走行基準ラインL1の開始位置及び終了位置に設定する基準ライン設定スイッチと、を備えている。これによれば、基準ライン設定スイッチによって走行基準ラインL1の設定を簡単に行うことができる。
作業車両1は、車体の位置を検出可能な測位装置40と、測位装置40で検出された車体の位置を走行基準ラインL1の開始位置及び終了位置に設定する基準ライン設定スイッチと、を備えている。これによれば、基準ライン設定スイッチによって走行基準ラインL1の設定を簡単に行うことができる。
この第3実施形態のその他の構成は、第1実施形態と同様に構成される。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて請求の範囲によって示され、請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて請求の範囲によって示され、請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
1 作業車両
3 車体
7 走行装置
10 運転席
10a 座部
10b 背もたれ部
30 ステアリングハンドル
31 ステアリングシャフト(回転軸)
37 自動操舵機構
38 ステアリングモータ
40 位置検出装置(測位装置)
42 慣性計測装置
46a 左制動装置
46b 右制動装置
45 表示装置
52 操舵切換スイッチ
53 補正スイッチ
53A 第1補正部
53B 第2補正部
60 制御装置
60A 第1制御装置
60B 第2制御装置
77 遮断スイッチ
78 遮断位置
79 通電位置
150 操作台
153 操舵スイッチ
153A 第1操舵部
153B 第2操舵部
177 カバー
178 パネルカバー
178a 上板部
178b 左板部
178e 支持部
178f 取付面
179 コラムカバー
195 リセットスイッチ
253A 操作部
253B コード部
301 第1状態
302 第2状態
310 凹部
310a 内周面
310b 係止部
310c 貫通孔
330 押圧部
331 取付部
331a 外周面
331b 係止部
L1 走行基準ライン
L2 走行予定ライン
L50 電源ライン
3 車体
7 走行装置
10 運転席
10a 座部
10b 背もたれ部
30 ステアリングハンドル
31 ステアリングシャフト(回転軸)
37 自動操舵機構
38 ステアリングモータ
40 位置検出装置(測位装置)
42 慣性計測装置
46a 左制動装置
46b 右制動装置
45 表示装置
52 操舵切換スイッチ
53 補正スイッチ
53A 第1補正部
53B 第2補正部
60 制御装置
60A 第1制御装置
60B 第2制御装置
77 遮断スイッチ
78 遮断位置
79 通電位置
150 操作台
153 操舵スイッチ
153A 第1操舵部
153B 第2操舵部
177 カバー
178 パネルカバー
178a 上板部
178b 左板部
178e 支持部
178f 取付面
179 コラムカバー
195 リセットスイッチ
253A 操作部
253B コード部
301 第1状態
302 第2状態
310 凹部
310a 内周面
310b 係止部
310c 貫通孔
330 押圧部
331 取付部
331a 外周面
331b 係止部
L1 走行基準ライン
L2 走行予定ライン
L50 電源ライン
Claims (27)
- 走行可能な車体と、
前記車体の操舵を回転の操作によって行うステアリングハンドルと、
前記ステアリングハンドルとは別に、前記車体の操舵を行う操舵スイッチと、
を備えている作業車両。 - 前記操舵スイッチは、前記車体の操舵を押圧の操作又はスライドの操作によって行うスイッチである請求項1に記載の作業車両。
- 前記操舵スイッチは、前記ステアリングハンドルの周囲に設けられている請求項1又は2に記載の作業車両。
- 前記ステアリングハンドルを回転可能に支持するステアリングシャフトを備え、
前記操舵スイッチは、前記ステアリングシャフトの周囲に設けられている請求項1~3のいずれかに記載の作業車両。 - 前記操舵スイッチは、前記車体を一方に操舵する第1操舵部と、前記車体を他方に操舵する第2操舵部とを含んでいる請求項1~4のいずれかに記載の作業車両。
- 前記車体に設けられ、且つ測位衛星の信号に基づいて前記車体の位置を検出する位置検出装置と、
前記位置検出装置で検出された前記車体の位置に基づいて前記車体を自動操舵する自動操舵機構と、
を備え、
前記操舵スイッチは、前記押圧の操作又はスライドの操作が行われた際に前記位置検出装置で検出された前記車体の位置の補正を指令し、前記自動操舵機構は、前記操舵スイッチの押圧の操作又はスライドの操作により補正された前記車体の位置である補正車体位置と、走行予定ラインに基づいて前記車体を自動操舵する請求項1~5のいずれかに記載の作業車両。 - 走行可能な車体と、
前記車体の操舵を回転の操作によって行うステアリングハンドルと、
前記車体に設けられ、且つ測位衛星の信号に基づいて前記車体の位置を検出する位置検出装置と、
前記位置検出装置で検出された前記車体の位置の補正を指令する補正スイッチと、
前記操舵スイッチの操作により補正された前記車体の位置である補正車体位置と、走行予定ラインに基づいて前記車体を自動操舵する自動操舵機構と、
を備えている作業車両。 - 前記補正スイッチは、前記車体の幅方向における一方側の前記車両の位置の補正を指令する第1補正部と、前記車体の幅方向における他方側の前記車両の位置の補正を指令する第2補正部とを含んでいる請求項7に記載の作業車両。
- 前記補正スイッチが接続され、且つ、前記自動操舵機構を制御する制御装置を備え、
前記制御装置は、前記補正スイッチの操作回数に基づいて、前記車体の位置の補正量を設定する請求項7又は8に記載の作業車両。 - 前記制御装置は、前記補正スイッチの操作量に基づいて、前記車体の位置の補正量を設定する請求項9に記載の作業車両。
- 前記自動操舵と、前記ステアリングハンドルによる手動操舵とを切り換える操舵切換スイッチを備えている請求項7~10のいずれかに記載の作業車両。
- 運転席と、
前記運転席の前方又は側方に設けられた操作台と、
を備え、
前記操作部材は、前記操作台に装着された状態で操作可能な第1状態と、前記操作台から取り外された状態で操作可能な第2状態とに位置変更可能である作業車両。 - 前記操作部材は、
前記第1状態では前記操作台に装着され且つ前記第2状態では前記操作台から取り外される操作部と、
前記操作部に接続されたコード部であって、前記第1状態では前記操作台内に収容され且つ前記第2状態では前記操作部と共に移動するコード部と、
を有している請求項12に記載の作業車両。 - 前記操作部は、前記第2状態では前記運転席の側方又は後方に位置する請求項13に記載の作業車両。
- 前記操作台は、前記操作部が装着される凹部と、前記操作部を凹部に装着した場合に前記コード部を収容するカバーとを有している請求項13又は14に記載の作業車両。
- 前記操作部材は、操作を推奨することを報知する報知部を有している請求項12~15のいずれかに記載の作業車両。
- 車体と、
前記車体の操舵を行うステアリングハンドルと、
を備え、
前記操作部材は、前記ステアリングハンドルとは別に前記車体の操舵を行う請求項12~15のいずれかに記載の作業車両。 - 車体と、
前記車体の操舵を行うステアリングハンドルと、
前記車体に設けられ、且つ測位衛星の信号に基づいて前記車体の位置を検出可能な位置検出装置と、
を備え、
前記操作部材は、前記位置検出装置で検出された前記車体の位置の補正を指令する補正スイッチである請求項12~16のいずれかに記載の作業車両。 - 前記補正スイッチの操作により補正された前記車体の位置である補正位置と走行予定ラインとに基づいて前記車体を操舵する操舵装置を備えている請求項18に記載の作業車両。
- 車体と、
前記車体の操舵を行うステアリングハンドルと、
前記車体に設けられ且つ測位衛星の信号に基づいて前記車体の位置を検出する位置検出装置と、
前記位置検出装置で検出された前記車体の位置に基づいて、前記ステアリングハンドルによる手動操舵とは別に前記車体の操舵を自動操舵する自動操舵機構と、
前記位置検出装置で検出された前記車体の位置の補正量を設定可能な補正スイッチと、
前記自動操舵機構の自動操舵を制御し且つ前記補正スイッチの所定の操作における補正量を変更可能な制御装置と、
を備えている作業車両。 - 前記自動操舵機構は、前記補正量に基づいて補正された前記車体の位置である補正車体位置と走行予定ラインとに基づいて前記車体を自動操舵する請求項20に記載の作業車両。
- 前記車体の幅方向の一方側に設けられた第1車輪と、前記車体の幅方向の他方側に設けられた第2車輪とを有する走行装置と、
前記第1車輪及び前記第2車輪のいずれかの制動が可能な制動装置と、
を備え、
前記制動装置は、前記車体の位置と走行予定ラインとの偏差が所定以上である場合に前記偏差を解消すべく、前記第1車輪及び前記第2車輪のいずれかの制動を行う請求項20又は21に記載の作業車両。 - 前記位置検出装置は、前記車体の慣性を検出し且つ検出した慣性に基づいて前記車体の位置を補正する慣性計測装置と、
前記慣性計測装置のドリフト量が所定以上になったことを表示する表示装置と、
前記慣性計測装置をリセットするリセットスイッチと、
を備えている請求項20~22のいずれかに記載の作業車両。 - 前記車体に設けられ且つ作業幅を変更可能な作業装置を備え、
前記作業装置は、前記車体の位置と走行予定ラインとの偏差に基づいて、当該作業装置の位置を変更する請求項20~23のいずれかに記載の作業車両。 - 前記自動操舵の開始及び終了の指令を行う操舵切換スイッチを備え、
前記自動操舵機構は、
前記ステアリングハンドルを支持するステアリングポストを回転可能なステアリングモータと、
前記ステアリングモータの回転を制御することで前記自動操舵を行う前記制御装置の電源ラインに接続され、前記電源ラインを遮断する遮断位置と前記電源ラインを通電する通電位置とに切り換え可能な遮断スイッチと、
を有し、
前記遮断スイッチは、前記操舵切換スイッチが前記自動操舵の開始の指令が行われた場合には前記通電位置に切り換わり、前記操舵切換スイッチが前記自動操舵の開始の指令から終了の指令を行った場合には前記遮断位置に切り換わる請求項20~24のいずれかに記載の作業車両。 - 前記自動操舵の開始及び終了のいずれかを切り換える操舵切換スイッチを備え、
前記制御装置は、前記操舵切換スイッチにより前記自動操舵の開始の切換が行われた場合に前記操舵装置による自動操舵を開始する請求項20~25のいずれかに記載の作業車両。 - 前記車体の位置を検出可能な位置検出装置と、
前記位置検出装置で検出された車体の位置を前記走行基準ラインの開始位置及び終了位置に設定する基準ライン設定スイッチと、
を備えている請求項20~26のいずれかに記載の作業車両。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020207014441A KR20200109295A (ko) | 2018-01-23 | 2018-12-29 | 작업 차량 |
| EP18903016.6A EP3744161A4 (en) | 2018-01-23 | 2018-12-29 | WORK VEHICLE |
| CN201880079815.XA CN111447826B (zh) | 2018-01-23 | 2018-12-29 | 作业车辆 |
| US16/932,981 US11399454B2 (en) | 2018-01-23 | 2020-07-20 | Working vehicle |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018009223A JP7125205B2 (ja) | 2018-01-23 | 2018-01-23 | 作業車両 |
| JP2018-009223 | 2018-01-23 | ||
| JP2018-120246 | 2018-06-25 | ||
| JP2018120246A JP7034848B2 (ja) | 2018-06-25 | 2018-06-25 | 作業車両 |
| JP2018-131238 | 2018-07-11 | ||
| JP2018131238A JP7290923B2 (ja) | 2018-07-11 | 2018-07-11 | 作業車両 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/932,981 Continuation US11399454B2 (en) | 2018-01-23 | 2020-07-20 | Working vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019146381A1 true WO2019146381A1 (ja) | 2019-08-01 |
Family
ID=67395922
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/048624 WO2019146381A1 (ja) | 2018-01-23 | 2018-12-29 | 作業車両 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11399454B2 (ja) |
| EP (1) | EP3744161A4 (ja) |
| KR (1) | KR20200109295A (ja) |
| CN (1) | CN111447826B (ja) |
| WO (1) | WO2019146381A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021045097A1 (ja) * | 2019-09-06 | 2021-03-11 | 株式会社クボタ | 作業車両 |
| JP2022040105A (ja) * | 2020-08-28 | 2022-03-10 | 豊疆智能(深▲セン▼)有限公司 | 制御パネル付きの田植機 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200096512A (ko) * | 2017-12-18 | 2020-08-12 | 가부시끼 가이샤 구보다 | 작업차 및 트랙터 |
| JP7259612B2 (ja) * | 2019-07-18 | 2023-04-18 | コベルコ建機株式会社 | ガイダンスシステム |
| CN114855900B (zh) * | 2022-06-15 | 2023-12-05 | 山推工程机械股份有限公司 | 一种装载机控制方法及装载机 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004239643A (ja) | 2003-02-03 | 2004-08-26 | Furuno Electric Co Ltd | ハイブリッド航法装置 |
| JP2009095290A (ja) * | 2007-10-17 | 2009-05-07 | Kubota Corp | コンバイン |
| JP2010075123A (ja) * | 2008-09-27 | 2010-04-08 | Iseki & Co Ltd | 散布作業車 |
| JP2010202014A (ja) * | 2009-03-02 | 2010-09-16 | Yanmar Co Ltd | 作業車 |
| JP2014180894A (ja) * | 2013-03-18 | 2014-09-29 | Yanmar Co Ltd | 走行車両 |
| JP2016041565A (ja) | 2014-08-19 | 2016-03-31 | 株式会社クボタ | 操作制御システム |
| JP2016106608A (ja) * | 2014-12-10 | 2016-06-20 | 井関農機株式会社 | 農用作業車両 |
| JP2017123803A (ja) | 2016-01-13 | 2017-07-20 | 株式会社クボタ | 農作業機 |
| US20170318422A1 (en) * | 2016-04-28 | 2017-11-02 | Westfield Retail Solutions, Inc. | Systems and methods to determine the locations of packages and provide navigational guidance to reach the packages |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0623530U (ja) | 1992-08-31 | 1994-03-29 | 東京電気株式会社 | 按摩装置 |
| JPH0652095U (ja) | 1992-12-16 | 1994-07-15 | エスエムケイ株式会社 | 携帯用オーディオ装置 |
| JPH09331588A (ja) | 1996-06-10 | 1997-12-22 | Inax Corp | リモコン装置 |
| US6314348B1 (en) * | 1998-02-11 | 2001-11-06 | Trimble Navigation Limited | Correction control for guidance control system |
| AUPP679598A0 (en) * | 1998-10-27 | 1998-11-19 | Agsystems Pty Ltd | A vehicle navigation apparatus |
| JP2002265022A (ja) | 2001-03-09 | 2002-09-18 | Daifuku Co Ltd | 棚設備 |
| JP2003036666A (ja) | 2001-07-24 | 2003-02-07 | Funai Electric Co Ltd | リモコン付きプレーヤ、リモコンおよびプレーヤ |
| JP2007110921A (ja) | 2005-10-18 | 2007-05-10 | Iseki & Co Ltd | 圃場作業車両 |
| JP2009006843A (ja) | 2007-06-28 | 2009-01-15 | Mitsubishi Agricult Mach Co Ltd | 作業車両のステアリング機構 |
| US8116977B2 (en) * | 2008-10-02 | 2012-02-14 | Trimble Navigation Limited | Automatic control of passive, towed implements |
| JP4801745B2 (ja) * | 2009-01-29 | 2011-10-26 | 株式会社クボタ | 乗用型田植機 |
| JP2011107209A (ja) | 2009-11-12 | 2011-06-02 | Sanyo Electric Co Ltd | 電子機器 |
| US8494726B2 (en) * | 2011-05-16 | 2013-07-23 | Trimble Navigation Ltd. | Agricultural autopilot path adjustment |
| US9454153B2 (en) * | 2014-11-24 | 2016-09-27 | Trimble Navigation Limited | Farm vehicle autopilot with automatic calibration, tuning and diagnostics |
| EP3467606B1 (en) * | 2016-05-30 | 2022-07-20 | Kubota Corporation | Autonomous work vehicle |
| JP6770839B2 (ja) * | 2016-07-08 | 2020-10-21 | 株式会社クボタ | 経路探索プログラムと、経路探索システムと、この経路探索システムを組み込んだ作業車 |
| JP6719395B2 (ja) * | 2017-01-20 | 2020-07-08 | 株式会社クボタ | 自動走行作業車 |
| JP6786407B2 (ja) * | 2017-01-23 | 2020-11-18 | 株式会社クボタ | 作業車無線管理システム |
| JP7049033B2 (ja) * | 2018-12-11 | 2022-04-06 | ヤンマーパワーテクノロジー株式会社 | 自律走行システム |
| JP7327306B2 (ja) * | 2020-07-13 | 2023-08-16 | トヨタ自動車株式会社 | ノズルユニット |
| US20220022375A1 (en) * | 2020-07-21 | 2022-01-27 | Deere & Company | Harvester implement degree of crop processing sensor system |
-
2018
- 2018-12-29 WO PCT/JP2018/048624 patent/WO2019146381A1/ja unknown
- 2018-12-29 CN CN201880079815.XA patent/CN111447826B/zh active Active
- 2018-12-29 EP EP18903016.6A patent/EP3744161A4/en active Pending
- 2018-12-29 KR KR1020207014441A patent/KR20200109295A/ko not_active Application Discontinuation
-
2020
- 2020-07-20 US US16/932,981 patent/US11399454B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004239643A (ja) | 2003-02-03 | 2004-08-26 | Furuno Electric Co Ltd | ハイブリッド航法装置 |
| JP2009095290A (ja) * | 2007-10-17 | 2009-05-07 | Kubota Corp | コンバイン |
| JP2010075123A (ja) * | 2008-09-27 | 2010-04-08 | Iseki & Co Ltd | 散布作業車 |
| JP2010202014A (ja) * | 2009-03-02 | 2010-09-16 | Yanmar Co Ltd | 作業車 |
| JP2014180894A (ja) * | 2013-03-18 | 2014-09-29 | Yanmar Co Ltd | 走行車両 |
| JP2016041565A (ja) | 2014-08-19 | 2016-03-31 | 株式会社クボタ | 操作制御システム |
| JP2016106608A (ja) * | 2014-12-10 | 2016-06-20 | 井関農機株式会社 | 農用作業車両 |
| JP2017123803A (ja) | 2016-01-13 | 2017-07-20 | 株式会社クボタ | 農作業機 |
| US20170318422A1 (en) * | 2016-04-28 | 2017-11-02 | Westfield Retail Solutions, Inc. | Systems and methods to determine the locations of packages and provide navigational guidance to reach the packages |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3744161A4 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021045097A1 (ja) * | 2019-09-06 | 2021-03-11 | 株式会社クボタ | 作業車両 |
| JP2021040498A (ja) * | 2019-09-06 | 2021-03-18 | 株式会社クボタ | 作業車両 |
| JP2022040105A (ja) * | 2020-08-28 | 2022-03-10 | 豊疆智能(深▲セン▼)有限公司 | 制御パネル付きの田植機 |
| JP7201757B2 (ja) | 2020-08-28 | 2023-01-10 | 豊疆智能(深▲セン▼)有限公司 | 制御パネル付きの田植機 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20200109295A (ko) | 2020-09-22 |
| US20200383261A1 (en) | 2020-12-10 |
| EP3744161A1 (en) | 2020-12-02 |
| CN111447826B (zh) | 2023-01-31 |
| US11399454B2 (en) | 2022-08-02 |
| CN111447826A (zh) | 2020-07-24 |
| EP3744161A4 (en) | 2022-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019146381A1 (ja) | 作業車両 | |
| JP7392058B2 (ja) | 作業車両 | |
| US11866094B2 (en) | Working vehicle having a display for displaying driving information thereof | |
| JP2024040453A (ja) | 作業車両 | |
| JP7046618B2 (ja) | 作業車両 | |
| JP2023107830A (ja) | 作業車両 | |
| WO2020003561A1 (ja) | 作業車両 | |
| JP7004411B2 (ja) | 作業車両 | |
| JP7132812B2 (ja) | 作業車両 | |
| JP7314353B2 (ja) | 作業車両 | |
| JP7125205B2 (ja) | 作業車両 | |
| JP7059019B2 (ja) | 作業車両 | |
| JP2020054320A (ja) | 作業車両 | |
| JP2020000020A (ja) | 作業車両 | |
| JP2020001467A (ja) | 作業車両 | |
| JP2020000024A (ja) | 作業車両 | |
| JP2020000025A (ja) | 作業車両 | |
| JP2020000140A (ja) | 作業車両 | |
| JP7163178B2 (ja) | 作業車両 | |
| JP2023118933A (ja) | 作業車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18903016 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018903016 Country of ref document: EP Effective date: 20200824 |