JP2022040105A - 制御パネル付きの田植機 - Google Patents
制御パネル付きの田植機 Download PDFInfo
- Publication number
- JP2022040105A JP2022040105A JP2021139401A JP2021139401A JP2022040105A JP 2022040105 A JP2022040105 A JP 2022040105A JP 2021139401 A JP2021139401 A JP 2021139401A JP 2021139401 A JP2021139401 A JP 2021139401A JP 2022040105 A JP2022040105 A JP 2022040105A
- Authority
- JP
- Japan
- Prior art keywords
- control
- rice transplanter
- hydraulic valve
- control panel
- detecting element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Guiding Agricultural Machines (AREA)
- Transplanting Machines (AREA)
Abstract
Description
前記ボディ本体の後部に保持されて、前記ボディ本体、前記走行主体及び前記挿植主体に接続され、且つ前記ボディ本体、前記走行主体及び前記挿植主体の稼働状態を制御できる制御パネルと、を含む。
前記制御ハンドルの位置情報を取得するステップ(a)と、
前記制御ハンドルの位置情報に基づいて前記HTS制御モーターの回転を制御するステップ(b)と、
前記HST制御モーターが前記油圧伝動装置の稼働状態を調節するステップ(c)とを含む。
前記差動装置ペダル320を電動駆動して回転させるステップ(a)と、
前記差動装置310を駆動して前記ロック状態と前記アンロック状態を切り替えさせるステップ(b)とを含む。
Claims (24)
- 制御パネル付きの田植機であって、
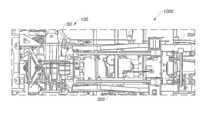
ボディ本体と、前記ボディ本体に設けられる走行主体及び挿植主体とを含む田植機本体と、
前記ボディ本体の後部に保持されて、前記ボディ本体、前記走行主体及び前記挿植主体に接続され、且つ前記ボディ本体、前記走行主体及び前記挿植主体の稼働状態を制御できる制御パネルと、を含むことを特徴とする制御パネル付きの田植機。 - 前記制御パネルは、制御マザーボード及び制御コンポーネントを含み、前記制御コンポーネントは、前記制御マザーボードに通信可能に接続され、操作命令を入力するように操作され得る、請求項1に記載の制御パネル付きの田植機。
- 前記制御コンポーネントは、前記制御マザーボードに接続される速度制御キーを含み、前記制御マザーボードは、前記走行主体に接続される、請求項2に記載の制御パネル付きの田植機。
- 前記制御コンポーネントは、前記挿植主体に接続される前記制御マザーボードと通信可能に接続される昇降制御キーを含む、請求項3に記載の制御パネル付きの田植機。
- 前記制御コンポーネントは、前記ボディ本体のライトコンポーネントに接続される前記制御マザーボードに通信可能に接続されるライト制御キーを含む、請求項4に記載の制御パネル付きの田植機。
- 前記田植機本体は、デフロックシステムを含み、前記制御コンポーネントは、前記デフロックシステムに接続される前記制御マザーボードに通信可能に接続されるデフロック制御キーを含む、請求項5に記載の制御パネル付きの田植機。
- 前記制御コンポーネントは、前記ボディ本体の音声コンポーネントに接続される前記制御マザーボードに通信可能に接続される音声制御キーを含む、請求項6に記載の制御パネル付きの田植機。
- 前記速度制御キー、昇降制御キー、前記ライト制御キー、前記デフロック制御キー及び前記音声制御キーは、ノブ、プッシュロッド及びボタンからなるタイプ群から選択される、請求項7に記載の制御パネル付きの田植機。
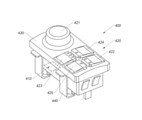
- 前記制御パネルは、内部に前記制御マザーボードが密封される保護ケースを含み、前記制御コンポーネントは、前記保護ケースの内部に可動に取り付けられる、請求項8に記載の制御パネル付きの田植機。
- 前記田植機本体は、ガードレールを含み、前記ガードレールは、左側ガードレール、右側ガードレール及び中間ガードレールを含み、前記左側ガードレール及び前記右側ガードレールがそれぞれ前記ボディ本体の左側と右側に設けられ、前記中間ガードレールの両端がそれぞれ前記左側ガードレール及び前記右側ガードレールに取り付けられ、且つ前記左側ガードレール、前記右側ガードレール及び前記中間ガードレールが前記ボディ本体の後部に位置し、
前記制御パネルは、前記保護ケースに設けられる組み立て部材を含み、前記組み立て部材は、前記左側ガードレール、前記右側ガードレール又は前記中間ガードレールに取り付けられるように前記ボディ本体の後部に保持される、請求項9に記載の制御パネル付きの田植機。 - コントローラ、制御ハンドル及び挿植制御ユニットを含む田植機制御システムをさらに含み、
前記走行主体は、油圧伝動装置、及び前記油圧伝動装置に駆動可能に接続される走行手段を含み、
前記挿植主体は、油圧弁及び挿植機構を含み、前記油圧弁は、弁本体及び前記弁本体に操作可能に接続される油圧弁棒を含み、
前記挿植機構は、前記弁本体に接続され、前記制御ハンドルは、前記コントローラに通信可能に接続され、前記挿植制御ユニットは、前記コントローラに制御可能に接続され、前記挿植制御ユニットは、前記挿植主体の前記油圧弁の前記油圧弁棒に接続される、請求項1~l0のいずれかに記載の制御パネル付きの田植機。 - 前記田植機制御システムは、前記制御ハンドルと前記コントローラに駆動可能に接続され、且つ前記走行主体の前記油圧伝動装置に接続される走行制御ユニットをさらに含む、請求項llに記載の制御パネル付きの田植機。
- 前記走行制御ユニットは、ハンドル位置検出素子、HST状態検出素子及びHST制御モーターを含み、
前記ハンドル位置検出素子は、前記制御ハンドルに接続されて、前記制御ハンドルの位置を検出し、
前記油圧伝動装置は、前記HST制御モーターに制御可能に接続され、前記HST検出素子は、前記HST制御モーターに接続されて、前記HST制御モーターの回転を検出する、請求項l2に記載の制御パネル付きの田植機。 - 前記ハンドル位置検出素子は、前記コントローラに通信可能に接続され、前記コントローラは、前記ハンドル位置検出素子によってフィードバックされた情報に基づいて、前記HST制御モーターの回転を制御する、請求項l3に記載の制御パネル付きの田植機。
- 前記HST状態検出素子は、前記コントローラに通信可能に接続され、前記コントローラは、前記HST状態検出素子によってフィードバックされた情報に基づいて、前記HST制御モーターの回転を制御する、請求項l4に記載の制御パネル付きの田植機。
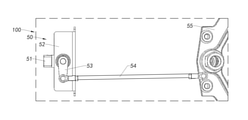
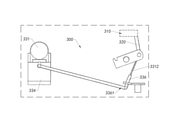
- 前記走行制御ユニットは、ハンドル駆動棒、第1取付板、支持フレーム及び第1リンクをさらに含み、前記ハンドル駆動棒の両端は、それぞれ前記制御ハンドルと前記支持フレームに接続され、前記支持フレームは、前記田植機本体の前記ボディ本体に取り付けられ、前記第1取付板は、前記ボディ本体に固定され、前記第1リンクは、前記支持フレームに取り付けられ、前記ハンドル位置検出素子は、前記ハンドル位置検出素子に接続され、
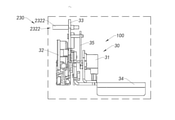
前記制御ハンドルは、回転するときに、前記ハンドル駆動棒を駆動して回転させ、前記ハンドル駆動棒は、前記第1リンクを動かして回転させ、さらに前記ハンドル位置検出素子を動かして偏向させる、請求項l5に記載の制御パネル付きの田植機。 - 前記走行制御ユニットは、回転板、第2取付板及び第2リンクをさらに含み、前記HST制御モーターは、前記第2取付板を介して前記ボディ本体に取り付けられ、前記回転板は、それぞれ前記HST制御モーターと前記油圧伝動装置に接続され、前記HST制御モーターは、回転するときに、前記回転板を駆動して前記油圧伝動装置に対して相対回転させ、且つ前記油圧伝動装置から出力される動力の大きさを調節し、
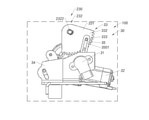
前記第2リンクは、それぞれ前記回転板と前記HST状態検出素子に接続され、前記HST状態検出素子は、前記回転板とともに偏向する、請求項l6に記載の制御パネル付きの田植機。 - 前記挿植制御ユニットは、油圧弁状態検出素子及び油圧弁制御モーターを含み、
前記油圧弁制御モーターは、前記コントローラに通信可能に接続され、前記挿植主体の前記油圧弁の前記油圧弁棒は、前記油圧弁制御モーターに駆動可能に接続され、前記油圧弁状態検出素子は、前記油圧弁棒の回転を検出する、請求項l5に記載の制御パネル付きの田植機。 - 前記挿植制御ユニットは、第1可動板、第2可動板及び第3リンクをさらに含み、前記油圧弁状態検出素子と前記油圧弁制御モーターは、前記第2可動板を介して前記ボディ本体に取り付けられ、
ここで、前記第1可動板は、前記油圧弁棒に取り付けられ、前記第3リンクの両端は、それぞれ前記第1可動板と前記油圧弁状態検出素子に接続され、
前記油圧弁制御モーターが前記第1可動板を駆動して回転させるときに、前記第1可動板は、前記油圧弁の前記油圧弁棒を作動させるとともに、前記油圧弁状態検出素子を駆動して偏向させる、請求項l8に記載の制御パネル付きの田植機。 - 前記油圧弁状態検出素子は、前記コントローラに通信可能に接続され、前記コントローラは、前記油圧弁状態検出素子によってフィードバックされた情報に基づいて前記油圧弁制御モーターの回転を制御する、請求項l9に記載の制御パネル付きの田植機。
- 前記挿植制御ユニットは、挿植位置検出素子、第1取付板、第4リンク及び第5リンクをさらに含み、
前記挿植位置検出素子は、前記第3取付板を介して前記ボディ本体に取り付けられ、前記第5リンクの両端は、それぞれ前記挿植主体の前記挿植機構と前記第4リンクに接続され、前記第4リンクの両端は、それぞれ前記第5リンクと前記挿植位置検出素子に接続され、
前記挿植機構は、作動中に、前記第4リンクと前記第5リンクを引っ張って移動し、且つ前記挿植位置検出素子を駆動して回転させる、請求項l8に記載の制御パネル付きの田植機。 - 前記挿植位置検出素子は、前記コントローラに通信可能に接続され、前記コントローラは、前記挿植位置検出素子によってフィードバックされた情報に基づいて前記油圧弁制御モーターを制御する、請求項2lに記載の制御パネル付きの田植機。
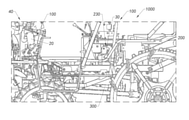
- 前記田植機制御システムは、操舵検出ユニットをさらに含み、前記操舵検出ユニットは、操舵角度検出素子、取付台、連結棒、駆動棒及び操舵板を含み、
前記取付台は前記田植機本体の前記ボディ本体に取り付けられ、前記操舵角度検出素子は前記取付台に取り付けられ、前記駆動棒は前記操舵板と前記接続部品に接続され、前記接続部品は前記操舵角度検出素子に接続され、前記回転板は前記走行手段のステアリングホイールに接続され、
前記走行手段のステアリングホイールが操舵されるときに、前記走行手段の前記ステアリングホイールは前記操舵板を駆動して回転させ、前記操舵板は前記接続部品を駆動して回転させ、前記接続部品は前記操舵角度検出素子を駆動して偏向させる、請求項22に記載の制御パネル付きの田植機。 - 前記ハンドル位置検出素子、前記HST状態検出素子、前記油圧弁状態検出素子、前記挿植位置検出素子及び前記操舵角度検出素子は、角度センサーとして実施される、請求項23に記載の制御パネル付きの田植機。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010883058.0 | 2020-08-28 | ||
| CN202010883058.0A CN113115613B (zh) | 2020-08-28 | 2020-08-28 | 带有控制面板的插秧机 |
| CN202021847668.7U CN214708704U (zh) | 2020-08-28 | 2020-08-28 | 带有控制面板的插秧机 |
| CN202021847668.7 | 2020-08-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022040105A true JP2022040105A (ja) | 2022-03-10 |
| JP7201757B2 JP7201757B2 (ja) | 2023-01-10 |
Family
ID=80498739
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021139401A Active JP7201757B2 (ja) | 2020-08-28 | 2021-08-27 | 制御パネル付きの田植機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7201757B2 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6368708U (ja) * | 1986-10-25 | 1988-05-09 | ||
| JPH0686101U (ja) * | 1993-05-27 | 1994-12-13 | 山武ハネウエル株式会社 | 農業機械におけるコントローラ |
| JPH08191615A (ja) * | 1995-01-13 | 1996-07-30 | Mitsubishi Agricult Mach Co Ltd | 歩行型作業車における操作装置 |
| JP2013074815A (ja) * | 2011-09-29 | 2013-04-25 | Iseki & Co Ltd | 作業車両 |
| WO2019146381A1 (ja) * | 2018-01-23 | 2019-08-01 | 株式会社クボタ | 作業車両 |
-
2021
- 2021-08-27 JP JP2021139401A patent/JP7201757B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6368708U (ja) * | 1986-10-25 | 1988-05-09 | ||
| JPH0686101U (ja) * | 1993-05-27 | 1994-12-13 | 山武ハネウエル株式会社 | 農業機械におけるコントローラ |
| JPH08191615A (ja) * | 1995-01-13 | 1996-07-30 | Mitsubishi Agricult Mach Co Ltd | 歩行型作業車における操作装置 |
| JP2013074815A (ja) * | 2011-09-29 | 2013-04-25 | Iseki & Co Ltd | 作業車両 |
| WO2019146381A1 (ja) * | 2018-01-23 | 2019-08-01 | 株式会社クボタ | 作業車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7201757B2 (ja) | 2023-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9909280B2 (en) | Mechanical linkage for control of power machine | |
| US10934684B2 (en) | Control system for power machine | |
| CN103850285B (zh) | 用于行驶控制启用的方法和设备 | |
| JP2022040105A (ja) | 制御パネル付きの田植機 | |
| JP4108913B2 (ja) | 土工機械用運転室 | |
| CN214708704U (zh) | 带有控制面板的插秧机 | |
| CN113115613B (zh) | 带有控制面板的插秧机 | |
| CN213117357U (zh) | 插秧机和其差速锁系统 | |
| WO2018175858A1 (en) | Power machine with a boom, a boom actuator, an implement and a stop for preventing contact between the boom actuator and the implement | |
| KR100596014B1 (ko) | 무논작업기 | |
| JP4321141B2 (ja) | 農作業車 | |
| KR20220080256A (ko) | 농업용 작업차량 | |
| KR101173388B1 (ko) | 농작업 차량용 작업기의 승강높이 제어장치 | |
| KR20210143481A (ko) | 농업용 작업차량 | |
| JP3901149B2 (ja) | 農作業機の操作装置 | |
| JP2016015936A (ja) | 作業車両、及びその昇降装置の制御方法 | |
| JP3659859B2 (ja) | 水田作業機 | |
| JP4506967B2 (ja) | 走行車両 | |
| KR102680208B1 (ko) | 농업용 작업차량 | |
| CA3056780C (en) | Power machine with a boom, a boom actuator, an implement and a stop for preventing contact between the boom actuator and the implement | |
| JP2595931Y2 (ja) | 移動農機の作業機昇降制御装置 | |
| JP2000106723A (ja) | 移動農機の油圧制御装置 | |
| JP3443401B2 (ja) | 対地作業機 | |
| WO2025197261A1 (ja) | 作業車 | |
| JP3540870B2 (ja) | 田植機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210827 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220715 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220830 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221118 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221222 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7201757 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |