WO2014148124A1 - ベルト式無段変速機の制御装置 - Google Patents
ベルト式無段変速機の制御装置 Download PDFInfo
- Publication number
- WO2014148124A1 WO2014148124A1 PCT/JP2014/052375 JP2014052375W WO2014148124A1 WO 2014148124 A1 WO2014148124 A1 WO 2014148124A1 JP 2014052375 W JP2014052375 W JP 2014052375W WO 2014148124 A1 WO2014148124 A1 WO 2014148124A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- torque
- pulley
- hydraulic pressure
- drive
- coast
- Prior art date
Links
- 230000005540 biological transmission Effects 0.000 title claims abstract description 68
- 230000001172 regenerating effect Effects 0.000 claims description 29
- 230000000694 effects Effects 0.000 claims description 9
- 238000000034 method Methods 0.000 description 16
- 230000007246 mechanism Effects 0.000 description 15
- 230000008569 process Effects 0.000 description 15
- 230000002441 reversible effect Effects 0.000 description 11
- 230000008929 regeneration Effects 0.000 description 10
- 238000011069 regeneration method Methods 0.000 description 10
- 230000000881 depressing effect Effects 0.000 description 9
- 230000001105 regulatory effect Effects 0.000 description 8
- 230000004044 response Effects 0.000 description 8
- 238000010248 power generation Methods 0.000 description 7
- 238000012545 processing Methods 0.000 description 7
- 230000007423 decrease Effects 0.000 description 6
- 230000000994 depressogenic effect Effects 0.000 description 6
- 230000007704 transition Effects 0.000 description 5
- 239000012530 fluid Substances 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000007792 addition Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/48—Parallel type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/50—Architecture of the driveline characterised by arrangement or kind of transmission units
- B60K6/54—Transmission for changing ratio
- B60K6/543—Transmission for changing ratio the transmission being a continuously variable transmission
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/101—Infinitely variable gearings
- B60W10/107—Infinitely variable gearings with endless flexible members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
- B60W10/184—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes
- B60W10/188—Conjoint control of vehicle sub-units of different type or different function including control of braking systems with wheel brakes hydraulic brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/30—Control strategies involving selection of transmission gear ratio
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18072—Coasting
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/68—Inputs being a function of gearing status
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
- F16H61/0213—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal characterised by the method for generating shift signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0262—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being hydraulic
- F16H61/0265—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being hydraulic for gearshift control, e.g. control functions for performing shifting or generation of shift signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
- F16H61/66272—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members characterised by means for controlling the torque transmitting capability of the gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H9/00—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members
- F16H9/02—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion
- F16H9/04—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion using belts, V-belts, or ropes
- F16H9/12—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion using belts, V-belts, or ropes engaging a pulley built-up out of relatively axially-adjustable parts in which the belt engages the opposite flanges of the pulley directly without interposed belt-supporting members
- F16H9/16—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion using belts, V-belts, or ropes engaging a pulley built-up out of relatively axially-adjustable parts in which the belt engages the opposite flanges of the pulley directly without interposed belt-supporting members using two pulleys, both built-up out of adjustable conical parts
- F16H9/18—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion using belts, V-belts, or ropes engaging a pulley built-up out of relatively axially-adjustable parts in which the belt engages the opposite flanges of the pulley directly without interposed belt-supporting members using two pulleys, both built-up out of adjustable conical parts only one flange of each pulley being adjustable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18072—Coasting
- B60W2030/1809—Without torque flow between driveshaft and engine, e.g. with clutch disengaged or transmission in neutral
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0614—Position of fuel or air injector
- B60W2510/0623—Fuel flow rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0657—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/083—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0666—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/10—Change speed gearings
- B60W2710/1077—Change speed gearings fluid pressure, e.g. oil pressure
- B60W2710/1083—Change speed gearings fluid pressure, e.g. oil pressure pressure of control fluid
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
- B60W2710/182—Brake pressure, e.g. of fluid or between pad and disc
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H59/18—Inputs being a function of torque or torque demand dependent on the position of the accelerator pedal
- F16H2059/186—Coasting
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
- F16H61/0213—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal characterised by the method for generating shift signals
- F16H2061/0227—Shift map selection, i.e. methods for controlling selection between different shift maps, e.g. to initiate switch to a map for up-hill driving
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/915—Specific drive or transmission adapted for hev
- Y10S903/917—Specific drive or transmission adapted for hev with transmission for changing gear ratio
- Y10S903/918—Continuously variable
Definitions
- the present invention relates to a control device for a belt-type continuously variable transmission that controls pulley hydraulic pressures of a primary pulley and a secondary pulley over which a belt is stretched.
- a normal hydraulic pressure-input torque map (first map) and a hydraulic pressure-input torque map in which the hydraulic pressure is reduced with respect to the input torque according to the accelerator opening and the accelerator opening speed.
- a technique for switching between (second map) is known (see, for example, Patent Document 1).
- the above-described conventional device is intended for a driving state in which torque is input from a driving source to the belt-type continuously variable transmission by an accelerator operation. For this reason, the pulley hydraulic pressure control with respect to the input torque in the coast state where torque is input from the drive wheels to the belt type continuously variable transmission is not clear.
- the condition determination by the accelerator release operation is performed, the second state is not obtained in the coast state.
- the pulley hydraulic pressure is controlled using the map.
- this second map hydraulic pressure reduction map
- An object of the present invention is to provide a control device for a belt-type continuously variable transmission capable of suppressing belt slippage that causes loss of belt transmission torque in a coast state where torque is input from drive wheels.
- the control device for a belt type continuously variable transmission includes a primary pulley connected to a drive source, a secondary pulley connected to a drive wheel, the primary pulley, and the secondary pulley. And a pulley hydraulic pressure control means for controlling pulley hydraulic pressure to the primary pulley and the secondary pulley.
- the input torque direction input to the belt-type continuously variable transmission is in a driving state in which the driving wheel is driven by the input torque from the driving source, or from the driving wheel.
- the pulley hydraulic pressure control means sets the pulley hydraulic pressure with respect to the input torque higher than the pulley hydraulic pressure with respect to the input torque when determined as the drive state when it is determined that the coast state is established.
- the pulley hydraulic pressure control means determines that the pulley hydraulic pressure relative to the input torque is in the driving state. It is set higher than the pulley hydraulic pressure against. That is, in the coast state, for example, when the pulley hydraulic pressure with respect to the input torque in the drive state is applied as it is, when the input torque from the drive wheel becomes large, the belt with respect to the transmission torque to be transmitted to the drive source by the belt The belt clamping force for clamping the belt may be insufficient, and belt slippage may occur due to the relative movement of the pulley and the belt.
- FIG. 1 is an overall system diagram showing a drive system and a control system of an FF hybrid vehicle equipped with a belt-type continuously variable transmission to which a control device of Embodiment 1 is applied. It is a flowchart which shows the flow of the CVT hydraulic pressure control process by the input torque direction performed by the CVT control unit of Example 1.
- FIG. It is a drive map figure which shows the drive side hydraulic characteristic of the drive side torque and pulley oil pressure used at the time of the judgment of the drive state of CVT oil pressure control processing.
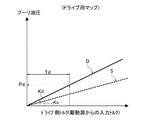
- FIG. 5 is a coast map showing coast-side hydraulic characteristics of coast-side torque and pulley oil pressure used when judging a coast state of CVT oil pressure control processing.
- the accelerator opening / brake / target torque command value (target drive torque command value) when the brake depressing operation is performed from the accelerator depressing operation via the accelerator foot release operation.
- Target braking torque command value (actual driving torque value, actual braking torque value).
- the configuration of the control device for the belt-type continuously variable transmission CVT in the first embodiment is “hybrid drive system configuration”, “pulley hydraulic control system configuration”, “hybrid electronic control system configuration”, “pulley hydraulic control by CVT input torque direction”
- the processing will be described separately.
- the hybrid drive system configuration includes an engine 1 (drive source), a motor generator 2 (drive source), a forward / reverse switching mechanism 3, a belt-type continuously variable transmission mechanism 4, and a final deceleration mechanism. 5 and left and right front wheels 6 and 6 (drive wheels).
- the engine 1 has an engine control actuator 10 that controls output torque and rotation speed by a throttle valve opening / closing operation, a fuel cut operation, and the like. Between the engine output shaft 11 of the engine 1 and the motor shaft of the motor generator 2, a first clutch 12 whose engagement / release is controlled by a selected travel mode is interposed.
- the motor generator 2 is a three-phase AC synchronous rotating electric machine, and converts power applied from the battery 22 into three-phase AC power by an inverter 21 during powering by a positive torque command, thereby applying a motor. Function is demonstrated. On the other hand, during regeneration by a negative torque command, power is generated by rotational energy input from the drive wheels 6 and 6 (or the engine 1), and the inverter 21 converts the three-phase AC power into single-phase DC power and charges the battery 22. By doing so, the generator function is exhibited.
- the forward / reverse switching mechanism 3 is a mechanism that switches the input rotation direction to the belt type continuously variable transmission mechanism 4 between a forward rotation direction during forward travel and a reverse rotation direction during reverse travel.
- the forward / reverse switching mechanism 3 includes a double pinion planetary gear 30, a forward clutch 31, and a reverse brake 32.
- the forward / reverse switching mechanism 3 and the belt-type continuously variable transmission mechanism 4 constitute a belt-type continuously variable transmission CVT.
- the belt-type continuously variable transmission mechanism 4 is a continuously variable transmission that continuously changes a gear ratio, which is a ratio of the input rotational speed of the transmission input shaft 40 and the output rotational speed of the transmission output shaft 41, by changing the belt contact diameter. It has a function.
- the belt type continuously variable transmission mechanism 4 includes a primary pulley 42, a secondary pulley 43, and a belt 44.
- the primary pulley 42 is composed of a fixed pulley 42 a and a slide pulley 42 b, and the slide pulley 42 b is slid by the primary hydraulic pressure guided to the primary hydraulic chamber 45.
- the secondary pulley 43 includes a fixed pulley 43 a and a slide pulley 43 b, and the slide pulley 43 b is slid by a secondary hydraulic pressure guided to the secondary hydraulic chamber 46.
- the belt 44 is wound around a sheave surface that forms a V shape of the primary pulley 42 and a sheave surface that forms a V shape of the secondary pulley 43.
- the belt 44 includes two sets of laminated rings in which a large number of annular rings are stacked from the inside to the outside, and a large number of elements that are formed of a punched plate material and are annularly connected to each other by sandwiching the two sets of laminated rings, Consists of.
- the final reduction mechanism 5 is a mechanism that decelerates transmission output rotation from the transmission output shaft 41 of the belt-type continuously variable transmission mechanism 4 and transmits it to the left and right front wheels 6 and 6 with a differential function.
- the final reduction mechanism 5 is interposed in the transmission output shaft 41, the idler shaft 50, and the left and right drive shafts 51, 51, and has a first gear 52, a second gear 53, and a third gear 54 having a reduction function. And a fourth gear 55 and a gear differential gear 56 having a differential function.
- the left and right front wheels 6 and 6 are provided with wheel cylinders 61 and 61 for braking the brake disc with the brake hydraulic pressure as a hydraulic brake device.
- the brake fluid pressure applied to the wheel cylinders 61 and 61 is generated by a brake fluid pressure actuator 62 provided in the middle of the brake fluid pressure path from the master cylinder 64 that converts the brake depression force applied to the brake pedal 63 into the brake fluid pressure. .
- the brake hydraulic pressure actuator 62 also generates brake hydraulic pressure to the left and right rear wheels (RL, RR).
- EV mode electric vehicle mode
- HEV mode hybrid vehicle mode
- EV mode drive torque control mode
- WSC mode drive torque control mode
- the “EV mode” is a mode in which the first clutch 12 is disengaged and the drive source is only the motor generator 2 and has a motor drive mode (motor power running) and a generator power generation mode (generator regeneration). This “EV mode” is selected, for example, when the required driving force is low and the battery SOC (electric power stored in the battery) is secured.
- the “HEV mode” is a mode in which the first clutch 12 is engaged and the drive source is the engine 1 and the motor generator 2.
- the motor assist mode (motor power running), the engine power generation mode (generator regeneration), and the deceleration regenerative power generation.
- Has a mode generator regeneration. This “HEV mode” is selected, for example, when the required driving force is high or when the battery SOC is insufficient.
- the “WSC mode” does not have a rotational difference absorbing element in the drive system unlike a torque converter, so the second clutch (the forward clutch 31 at the time of forward movement and the reverse brake 32 at the time of backward movement) is brought into a slip engagement state.
- the torque transmission capacity of the two clutches is controlled.
- the torque transmission capacity of the second clutch is controlled so that the driving force transmitted after passing through the second clutch becomes the required driving force that appears in the operation amount of the accelerator pedal of the driver.
- the “WSC mode” is selected in a region where the engine speed is lower than the idle speed, such as when starting in the “HEV mode” selection state.
- the pulley hydraulic control system configuration includes a variable pressure hydraulic control unit 7 based on a dual pressure control system that generates a primary hydraulic pressure Ppri guided to the primary hydraulic chamber 45 and a secondary hydraulic pressure Psec guided to the secondary hydraulic chamber 46. It has.
- the transmission hydraulic pressure control unit 7 includes an oil pump 70, a regulator valve 71, a line pressure solenoid 72, a line pressure oil passage 73, a first pressure regulating valve 74, a primary hydraulic solenoid 75, and a primary pressure oil passage 76. , A second pressure regulating valve 77, a secondary hydraulic solenoid 78, and a secondary pressure oil passage 79 are provided.
- the regulator valve 71 is a valve that regulates the line pressure PL using the discharge pressure from the oil pump 70 as a source pressure.
- the regulator valve 71 has a line pressure solenoid 72 and adjusts the pressure of the oil pumped from the oil pump 70 to a predetermined line pressure PL in response to a command from the CVT control unit 81.
- the first pressure regulating valve 74 is a valve that uses the line pressure PL generated by the regulator valve 71 as a source pressure to generate a primary hydraulic pressure Ppri guided to the primary hydraulic chamber 45.
- the first pressure regulating valve 74 has a primary hydraulic solenoid 75 and applies an operation signal pressure to the spool of the first pressure regulating valve 74 in response to a command from the CVT control unit 81.
- the second pressure regulating valve 77 is a valve that uses the line pressure PL generated by the regulator valve 71 as a source pressure to generate the secondary hydraulic pressure Psec guided to the secondary hydraulic chamber 46.
- the second pressure regulating valve 77 has a secondary hydraulic solenoid 78 and applies an operation signal pressure to the spool of the second pressure regulating valve 77 in accordance with a command from the CVT control unit 8.
- the hybrid electronic control system 8 includes a hybrid control module 80, a CVT control unit 81, a brake control unit 82, a motor control unit 83, and an engine control unit 84, as shown in FIG. Is done.
- the hybrid control module 80 and the control units 81, 82, 83, 84 are connected via a CAN communication line 90 that can exchange information with each other.
- the hybrid control module 80 manages the energy consumption of the entire vehicle and has an integrated control function for running the vehicle with the highest efficiency.
- the hybrid control module 80 is provided with an accelerator opening sensor 85, a vehicle speed sensor 86, a brake stroke sensor 87, and the like. Input necessary information via information and CAN communication line.
- the hybrid control module 80 includes a driving torque calculation unit that calculates a target driving torque and an actual driving torque when the driver depresses the accelerator, and a braking torque that calculates the target braking torque and the actual braking torque when the driver depresses the brake. And an arithmetic unit.
- the target braking torque the maximum regenerative torque possible by the motor generator 2 is determined first, and the remainder obtained by subtracting the regenerative torque from the target braking torque is set as the hydraulic torque, and the regenerative braking torque and the hydraulic braking are performed. It has a cooperative regeneration control unit that obtains a target braking torque (target deceleration) by the sum of torques. Furthermore, it has a regeneration control unit that regenerates by the motor generator 2 during deceleration.
- the CVT control unit 81 receives necessary information from the primary rotation sensor 88, the secondary rotation sensor 89, etc., and performs hydraulic control of the belt type continuously variable transmission CVT such as line pressure control, transmission hydraulic pressure control, forward / reverse switching control, and the like.
- the line pressure control is performed by outputting a control command for obtaining a target line pressure corresponding to the transmission input torque or the like to the line pressure solenoid 72.
- the shift hydraulic pressure control is performed by outputting a control command for obtaining a target gear ratio to the primary hydraulic solenoid 75 and the secondary hydraulic solenoid 78 according to the vehicle speed VSP, the accelerator opening APO, and the like.
- the forward / reverse switching control is performed by engaging the forward clutch 31 when the selected range position is the forward travel range such as the D range, and engaging the reverse brake 32 when the selected range position is the R range.
- the brake control unit 82 outputs a drive command to the brake hydraulic pressure actuator 62 based on a control command from the hybrid control module 80. Further, actual hydraulic braking torque information obtained by monitoring the brake hydraulic pressure generated by the brake hydraulic actuator 62 is sent to the hybrid control module 80.
- the motor control unit 83 outputs a target power running command (positive torque command) or a target regeneration command (negative torque command) to the inverter 21 based on a control command from the hybrid control module 80. Further, the actual motor driving torque information or the actual generator braking torque information obtained by detecting the motor applied current value or the like is sent to the hybrid control module 80.
- the engine control unit 84 outputs a drive command to the engine control actuator 10 based on a control command from the hybrid control module 80. Further, actual engine drive torque information obtained from the rotational speed of the engine 1 and the fuel injection amount is sent to the hybrid control module 80.
- FIG. 2 shows a flow of pulley hydraulic pressure control processing in the CVT input torque direction by the CVT control unit 81
- FIG. 3 shows a drive map
- FIG. 4 shows a coast map.
- each step of the flowchart of FIG. 2 showing the pulley hydraulic pressure control processing configuration according to the CVT input torque direction will be described. Note that the flowchart of FIG. 2 is repeatedly executed every predetermined control cycle.
- step S1 the target torque command value and the actual torque value are read from the hybrid control module 80 (HCM), and the process proceeds to step S2.
- HCM hybrid control module 80
- the accelerator is depressed by the driver in the EV mode or the HEV mode
- the target drive torque calculated from the accelerator opening APO and the vehicle speed VSP is used as the target torque command value on the drive side.
- the actual motor drive torque information obtained by detecting the motor drive current value or the like is set as the actual torque value.
- the actual drive torque of the engine 1 is added to the actual torque value to the motor generator 2. The actual torque value on the drive side.
- Target regenerative command value (negative torque command value) to be output to the motor generator 2 based on the calculated target regenerative torque when the brake is depressed by the driver in EV mode or HEV mode and coordinated regenerative control is performed Is the target torque command value on the coast side. Further, during the cooperative regenerative control, the actual generator braking torque information obtained by detecting the motor generated current value or the like is used as the actual torque value on the coast side.
- step S2 following the reading of the target torque command value and the actual torque value in step S1, it is determined whether or not it is in a drive state. If YES (drive state), the process proceeds to step S3. If NO (state other than the drive), the process proceeds to step S6.
- the “drive state” refers to a state in which the direction of the input torque input to the belt type continuously variable transmission CVT drives the drive wheels by the input torque from the drive source. Then, for example, when the target drive torque calculated from the accelerator opening APO and the vehicle speed VSP exceeds a set drive determination threshold, the drive state is determined.
- step S3 following the determination that the drive state is in step S2, the drive-side target torque corresponding pulley hydraulic pressure Ptd is calculated based on the drive-side target torque command value and the drive map shown in FIG. Proceed to S4.
- the drive side target torque command value is set as the drive side torque, and the target torque corresponding pulley hydraulic pressure Ptd is calculated.
- step S4 following the calculation of the drive side target torque corresponding pulley hydraulic pressure Ptd in step S3, the drive side actual torque corresponding pulley hydraulic pressure Prd is calculated based on the drive side actual torque value and the drive map shown in FIG. Then, the process proceeds to step S5.
- the actual torque value on the drive side is set as the drive side torque, and the pulley torque Prd corresponding to the actual torque is calculated.
- step S5 following the calculation of the drive side actual torque corresponding pulley hydraulic pressure Prd in step S4, the drive side target torque corresponding pulley hydraulic pressure Ptd calculated in step S3 and the drive side actual torque calculated in step S4.
- the higher pressure is selected by selecting high, the selected oil pressure is set as the drive-side pulley oil pressure target value Pd *, and the process proceeds to step S11.
- step S6 following the determination that the state is other than the drive in step S2, it is determined whether or not the coast state. If YES (coast state), the process proceeds to step S7. If NO (state other than the coast), the process proceeds to step S10.
- the “coast state” refers to a state in which the direction of the input torque input to the belt type continuously variable transmission CVT is the direction in which the drive source is rotated by the input torque from the drive wheels. Then, for example, when the target regenerative torque when the cooperative regenerative control is performed exceeds the set coast determination threshold, it is determined that the coast state.
- step S7 following the determination that the coast state is in step S6, the coast-side target torque corresponding pulley hydraulic pressure Ptc is calculated based on the coast-side target torque command value and the coast map shown in FIG. Proceed to S8.
- the coast side target torque command value is set as the coast side torque, and the target torque corresponding pulley hydraulic pressure Ptc is calculated.
- the fact that the slope Kc shown in FIG. 4 is larger than the slope Kd shown in FIG. 3 means that the pulley hydraulic pressure corresponding to the input torque is higher in the coast map than in the drive map.
- step S8 following the calculation of the coast-side target torque corresponding pulley hydraulic pressure Ptc in step S7, the coast-side actual torque corresponding pulley hydraulic pressure Prc is calculated based on the coast-side actual torque value and the coast map shown in FIG. Then, the process proceeds to step S9.
- the actual torque value on the coast side is set as the coast-side torque, and the pulley torque Prc corresponding to the actual torque is calculated.
- step S9 following the calculation of the coast-side actual torque corresponding pulley hydraulic pressure Prc in step S8, the coast-side target torque-corresponding pulley hydraulic pressure Ptc calculated in step S7 and the coast-side actual torque calculated in step S8.
- the higher pressure is selected by selecting high, the selected oil pressure is set as the coast side pulley oil pressure target value Pc *, and the process proceeds to step S11.
- step S10 the target torque is determined based on the target torque command value, the actual torque value, and the low torque side hydraulic characteristic S indicated by the broken line in FIG.
- the corresponding pulley hydraulic pressure Pts and the actual torque corresponding pulley hydraulic pressure Prs are calculated, the higher pressure is selected by Select High, the selected hydraulic pressure is set as the pulley hydraulic pressure target value Ps * in the low torque range, and the process proceeds to Step S11.
- the slope Ks of the map characteristic S for low torque is a low torque region in which belt slip does not become a problem
- the slope Kd of the drive side hydraulic characteristic D is reduced so as to reduce the friction between the pulleys 42 and 43 and the belt 44. Is set smaller.
- step S11 following the setting of the pulley hydraulic pressure target values Pd *, Pc *, and Ps * in step S5, step S9, or step S10, the obtained pulley hydraulic pressure target values Pd *, Pc *, and Ps * are finally set as final values.
- a pulley pressure target value P * is set, and a line pressure command value that secures the pulley pressure target value P * is calculated.
- the primary hydraulic pressure Ppri and the secondary hydraulic pressure Psec to obtain the target gear ratio at that time are determined, the primary hydraulic pressure command value and the secondary hydraulic pressure command value are calculated based on the determination of the hydraulic pressure distribution, and the process proceeds to step S12.
- step S12 following the calculation of the line pressure command value, the primary hydraulic pressure command value, and the secondary hydraulic pressure command value in step S11, the line pressure command value is output to the line pressure solenoid 72, and the primary hydraulic pressure command value is sent to the primary hydraulic solenoid 75.
- the secondary hydraulic pressure command value is output to the secondary hydraulic solenoid 78, and the process proceeds to the end.
- step S3 step S4, and step S5
- step S11, step S12, and the end is repeated. That is, in step S3, step S4, and step S5, the target torque corresponding pulley hydraulic pressure Ptd and the actual torque corresponding pulley are based on the target torque command value, the actual torque value, and the drive side hydraulic characteristic D shown by the solid line in FIG.
- the hydraulic pressure Prd is calculated, the higher pressure is selected by select high, and the selected hydraulic pressure is set as the drive-side pulley hydraulic pressure target value Pd *.
- step S1 when the input torque direction input to the belt type continuously variable transmission CVT is in a coasting state from the drive wheels 6 and 6 toward the drive source (engine 1 and motor generator 2), the steps in the flowchart of FIG.
- step S2 ⁇ Step S6 ⁇ Step S7 ⁇ Step S8 ⁇ Step S9 ⁇ Step S11 ⁇ Step S12 ⁇ End is repeated. That is, in step S7, step S8, and step S9, the target torque corresponding pulley hydraulic pressure Ptd and the actual torque corresponding pulley are based on the target torque command value, the actual torque value, and the coast side hydraulic characteristic C shown by the solid line in FIG.
- the hydraulic pressure Prd is calculated, the higher pressure is selected by select high, and the selected hydraulic pressure is set as the coast-side pulley hydraulic pressure target value Pc *.
- the drive side pulley hydraulic pressure Pd and the coast side pulley hydraulic pressure Pc are compared, as is apparent from FIGS. , Pd ⁇ Pc.
- step S1 step S2
- step S6 step The flow from S10 ⁇ step S11 ⁇ step S12 ⁇ end is repeated. That is, in step S10, the target torque corresponding pulley hydraulic pressure Pts and the actual torque corresponding pulley hydraulic pressure Prs are calculated based on the target torque command value, the actual torque value, and the low torque side hydraulic pressure characteristic S indicated by the broken line in FIG. The higher pressure is selected by select high, and the selected hydraulic pressure is set as the pulley hydraulic pressure target value Ps * in the low torque range.
- FIG. 5 shows each characteristic when the brake depressing operation is performed from the accelerator depressing operation to the accelerator depressing operation in the FF hybrid vehicle to which the control device of the first embodiment is applied.
- the pulley hydraulic pressure control operation will be described with reference to FIG.
- the target torque command value (target drive torque command value) shows a characteristic of increasing following the increase of the accelerator opening.
- the actual torque value (actual driving torque value) shows a characteristic that matches the target torque command value with a response delay from the increase in the accelerator opening.
- the target torque corresponding pulley hydraulic pressure Ptd and the actual torque correspondence are based on the target drive torque command value, the actual drive torque value, and the drive side hydraulic characteristic D shown by the solid line in FIG.
- the pulley hydraulic pressure Prd is calculated.
- the higher target torque corresponding pulley hydraulic pressure Ptd is selected by the select high, and the selected hydraulic pressure is set as the drive-side pulley hydraulic pressure target value Pd *.
- the oil pressure response of the pulley oil pressure is lower than that of the motor.
- the target pulley oil pressure P * is set by the actual drive torque command value, the belt clamp force will be Insufficient belt 44 may slip.
- the target torque command value (target drive torque command value) from the accelerator release operation to the time t3 from the time t2 to time t3 is It shows a characteristic that decreases following the decrease.
- the actual torque value (actual driving torque value) shows a characteristic that gradually matches the target torque command value with a response delay from a decrease in the accelerator opening.
- the belt 44 may slip due to a sudden decrease in the pulley hydraulic pressure.
- the target pulley hydraulic pressure P * is set by the actual drive torque value having a response delay with respect to the target drive torque command value. Note that a region indicated by F in FIG. 5 represents a post-pulling region of the pulley hydraulic pressure. For this reason, the primary hydraulic pressure Ppri and the secondary hydraulic pressure Psec are gradually decreased along with the decrease in the actual driving torque value. Slip is prevented.
- the target torque command value (target regenerative torque command value to the motor generator 2) shows a characteristic that immediately decreases when the cooperative regenerative control is started.
- the actual torque value (actual regenerative torque value) shows a characteristic that matches the target regenerative torque command value with a response delay from the brake depression operation.
- the target torque corresponding pulley oil pressure Ptc and the actual torque correspondence are based on the target regenerative torque command value, the actual regenerative torque value, and the coast side hydraulic characteristic C shown by the solid line in FIG.
- the pulley hydraulic pressure Prc is calculated.
- the higher target torque corresponding pulley oil pressure Ptc is selected by the select high, and the selected oil pressure is set as the coast side pulley oil pressure target value Pd *.
- the belt clamping force for clamping the belt 44 is ensured even in the coast state. For this reason, in the coast steady state, the clamping force for maintaining the belt clamping is ensured even when the input torque increases, and the belt 44 is prevented from slipping.
- the motor generator 2 immediately becomes negative torque due to high generator responsiveness, and the motor generator 2 is used as a drive system load. A large torque is suddenly input from the left and right front wheels 6 and 6 toward the belt type continuously variable transmission CVT.
- the belt 44 may slip due to a delay in the increase of the pulley hydraulic pressure in the transition region where the coast state is started.
- the primary hydraulic pressure Ppri and the secondary hydraulic pressure Psec can be increased by setting the target pulley hydraulic pressure P * according to the target regenerative torque command value so that the response to the brake depressing operation is delayed without delay.
- a region indicated by G in FIG. 5 represents a pulley oil pressure first-in region. For this reason, in the transition region where the coast state is started, the belt clamping force is secured at an early stage, and the belt 44 is prevented from slipping.
- a control device for a belt-type continuously variable transmission CVT comprising: a belt 44 that is stretched; and pulley hydraulic pressure control means (CVT control unit 81) that controls pulley hydraulic pressure to the primary pulley 42 and the secondary pulley 43.
- the direction of input torque input to the belt type continuously variable transmission CVT is such that the drive wheels (left and right front wheels 6, 6) are driven by input torque from the drive source (engine 1, motor generator 2).
- Driving state determination means for determining whether the vehicle is in a driving state or a coasting state in the direction in which the driving source (engine 1, motor generator 2) is rotated by input torque from the driving wheels (left and right front wheels 6, 6). 2 steps S2, S6)
- the pulley hydraulic pressure control means (FIG. 2) sets the pulley hydraulic pressure with respect to the input torque higher than the pulley hydraulic pressure with respect to the input torque when it is determined that the drive state is established when it is determined that the coast state is established. For this reason, in the coast state in which torque is input from the drive wheels (the left and right front wheels 6, 6), it is possible to suppress belt slippage that causes loss of belt transmission torque.
- a drive map (FIG. 3) based on the drive side hydraulic characteristic D indicating the relationship between the pulley hydraulic pressure and the drive side torque, and a coast side hydraulic characteristic C indicating the relationship between the pulley hydraulic pressure and the coast side torque.
- a coast map (FIG. 4) in which the slope Kc of C is larger than the slope Kd of the drive side hydraulic characteristic D and the pulley hydraulic pressure becomes higher than the drive map when the input torque is the same.
- the pulley hydraulic pressure control means (FIG. 2) sets a target pulley hydraulic pressure Pc * using the coast map (FIG. 4) when it is determined that the coast state is established. For this reason, in addition to the effect of (1), when using the drive map (FIG. 3) and the coast map (FIG.
- the drive-side target torque corresponding pulley hydraulic pressure using the drive-side torque based on the target torque command value and the drive-side hydraulic characteristic D Ptd is calculated
- the drive side actual torque corresponding pulley hydraulic pressure Prd is calculated using the drive side torque based on the actual torque value and the drive side hydraulic characteristic D
- the target torque corresponding pulley hydraulic pressure Prd and the actual torque corresponding pulley hydraulic pressure Prd are calculated.
- the target pulley hydraulic pressure Pd * is set by selecting high. For this reason, in addition to the effect of (2) or (3), in the drive transition region due to the accelerator depressing operation, it is possible to ensure good driving performance by suppressing slippage of the belt 44 by hydraulic pre-loading.
- the drive source has a motor generator 2;
- the operating state determining means determines that the coasting state is in effect when regenerative braking is performed by the motor generator 2. Therefore, in addition to the effects (1) to (4), high regenerative power generation efficiency can be ensured by suppressing slippage of the belt 44 by applying hydraulic pre-loading at the time of braking or deceleration when the motor generator 2 performs regenerative braking. Can do.
- control apparatus of the belt type continuously variable transmission of the present invention has been described based on the first embodiment, the specific configuration is not limited to the first embodiment, and each claim of the claims Design changes and additions are permitted without departing from the spirit of the invention according to the paragraph.
- the target pulley hydraulic pressure is set using a drive map (FIG. 3) and a coast map (FIG. 4) as pulley hydraulic pressure control means.
- the pulley hydraulic pressure control means may be an example in which the target pulley hydraulic pressure with respect to the input torque is set by a correction calculation with different correction coefficients depending on whether the driving state or the coasting state.
- the belt of the belt-type continuously variable transmission CVT an example of the belt 44 including two stacked rings and a large number of elements is shown.
- the belt of the belt type continuously variable transmission may be a chain belt or another belt.
- a map in which the positive input torque is the drive side and the negative input torque is the coast side can be applied.
- positive and negative signs may be assigned to the target torque command value and the actual torque value to be read. For example, when the accelerator is depressed by the driver in the EV mode or HEV mode, the target drive torque calculated from the accelerator opening APO and the vehicle speed VSP is given to the drive side, that is, a positive sign is used as the target torque command value.
- the actual motor drive torque information obtained by detecting the motor drive current value or the like is set as the actual torque value.
- the actual drive torque of the engine 1 is added to the actual torque value to the motor generator 2.
- a positive sign is given to obtain the actual torque value on the drive side.
- the target regeneration command value output to the motor generator 2 based on the calculated target regeneration torque is negative.
- a code is given to set the target torque command value on the coast side.
- the actual generator braking torque information obtained by detecting the motor power generation current value or the like is given a negative sign as an actual torque value on the coast side.
- the means for giving positive and negative signs to the input torque corresponds to the operating state determination means.
- the pulley hydraulic pressure with respect to the input torque is determined when the driving torque is determined. It may be set higher than the pulley hydraulic pressure with respect to the input torque.
- an application example to an FF hybrid vehicle equipped with a belt-type continuously variable transmission is shown.
- an engine vehicle equipped with a belt-type continuously variable transmission, an electric vehicle equipped with a belt-type continuously variable transmission, and the like can also be applied to.
- the present invention can be applied to any vehicle equipped with a belt-type continuously variable transmission that performs shift control by pulley hydraulic pressure.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Power Engineering (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Transmission Device (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
前記制御装置は、前記ベルト式無段変速機に対して入力される入力トルク方向が、前記駆動源からの入力トルクにより前記駆動輪を駆動させる方向のドライブ状態であるか、前記駆動輪からの入力トルクにより前記駆動源を連れ回す方向のコースト状態であるかを判断する運転状態判断手段を有する。
前記プーリ油圧制御手段は、前記コースト状態であると判断されたとき、入力トルクに対するプーリ油圧を、前記ドライブ状態であると判断されたときの入力トルクに対するプーリ油圧より高く設定する。
これに対し、コースト状態では、ドライブ状態の入力トルクに対するプーリ油圧より高いプーリ油圧とすることで、ベルトを挟持するベルトクランプ力が確保され、駆動輪からの入力トルクが大きくなった場合でもベルト滑りが抑制される。このベルト滑りの抑制によりベルト伝達トルクの損失が低下することで、エンジン車の場合はエンジンブレーキの効きが確保され、電動車両の場合は高い回生発電効率が確保される。
この結果、駆動輪からトルクが入力されるコースト状態において、ベルト伝達トルクの損失を招くベルトの滑りを抑制することができる。
実施例1におけるベルト式無段変速機CVTの制御装置の構成を、「ハイブリッド駆動系構成」、「プーリ油圧制御系構成」、「ハイブリッド電子制御系構成」、「CVT入力トルク方向によるプーリ油圧制御処理構成」に分けて説明する。
前記ハイブリッド駆動系構成は、図1に示すように、エンジン1(駆動源)と、モータジェネレータ2(駆動源)と、前後進切替機構3と、ベルト式無段変速機構4と、終減速機構5と、左右前輪6,6(駆動輪)と、を備えている。
前記プーリ油圧制御系構成としては、図1に示すように、プライマリ油圧室45に導かれるプライマリ油圧Ppriと、セカンダリ油圧室46に導かれるセカンダリ油圧Psecを作り出す両調圧方式による変速油圧コントロールユニット7を備えている。
前記ハイブリッド電子制御系8は、図1に示すように、ハイブリッドコントロールモジュール80と、CVTコントロールユニット81と、ブレーキコントロールユニット82と、モータコントロールユニット83と、エンジンコントロールユニット84と、を有して構成される。なお、ハイブリッドコントロールモジュール80と各コントロールユニット81,82,83,84は、情報交換が互いに可能なCAN通信線90を介して接続されている。
図2は、CVTコントロールユニット81によりCVT入力トルク方向によるプーリ油圧制御処理の流れを示し、図3は、ドライブ用マップを示し、図4は、コースト用マップを示す。以下、CVT入力トルク方向によるプーリ油圧制御処理構成をあらわす図2のフローチャートの各ステップについて説明する。なお、図2のフローチャートは、所定の制御周期毎に繰り返し実行される。
ここで、EVモード又はHEVモードでのドライバーによるアクセル踏み込み操作時には、アクセル開度APOと車速VSPにより演算される目標駆動トルクをドライブ側の目標トルク指令値とする。また、EVモードでは、モータ駆動電流値等の検出により得られる実モータ駆動トルク情報を実トルク値とし、HEVモードでは、モータジェネレータ2への実トルク値に、エンジン1の実駆動トルクを加えてドライブ側の実トルク値とする。
EVモード又はHEVモードでのドライバーによるブレーキ踏み込み操作時であって、協調回生制御が行われるとき、演算される目標回生トルクに基づき、モータジェネレータ2へ出力する目標回生指令値(負トルク指令値)をコースト側の目標トルク指令値とする。また、協調回生制御中、モータ発電電流値等の検出により得られる実ジェネレータ制動トルク情報をコースト側の実トルク値とする。
ここで、「ドライブ状態」とは、ベルト式無段変速機CVTに対して入力される入力トルク方向が、駆動源からの入力トルクにより駆動輪を駆動させる方向の状態をいう。そして、例えば、アクセル開度APOと車速VSPにより演算された目標駆動トルクが、設定されたドライブ判断閾値を超えているときドライブ状態と判断する。
ここで、図3に示す傾きKdによるドライブ側油圧特性Dに基づき、ドライブ側の目標トルク指令値をドライブ側トルクとし、目標トルク対応プーリ油圧Ptdが演算される。
ここで、図3に示す傾きKdによるドライブ側油圧特性Dに基づき、ドライブ側の実トルク値をドライブ側トルクとし、実トルク対応プーリ油圧Prdが演算される。
ここで、「コースト状態」とは、ベルト式無段変速機CVTに対して入力される入力トルク方向が、駆動輪からの入力トルクにより駆動源を連れ回す方向の状態をいう。そして、例えば、協調回生制御が実施されるときの目標回生トルクが、設定されたコースト判断閾値を超えているときコースト状態と判断する。
ここで、図4に示す傾きKc(>Kd)によるコースト側油圧特性Cに基づき、コースト側の目標トルク指令値をコースト側トルクとし、目標トルク対応プーリ油圧Ptcが演算される。図4に示す傾きKcが、図3に示す傾きKdより大きいということは、コースト用マップでは、ドライブ用マップより入力トルクに対応するプーリ油圧が高くなることを意味する。
ここで、図4に示す傾きKc(>Kd)によるコースト側油圧特性Cに基づき、コースト側の実トルク値をコースト側トルクとし、実トルク対応プーリ油圧Prcが演算される。
ここで、低トルク用マップ特性Sの傾きKsは、ベルト滑りが問題とならない低トルク域であるため、プーリ42,43とベルト44のフリクションを低減するように、ドライブ側油圧特性Dの傾きKdよりも小さく設定している。
実施例1のベルト式無段変速機CVTの制御装置における作用を、「CVT入力トルク方向によるプーリ油圧制御処理作用」、「プーリ油圧制御作用」に分けて説明する。
ベルト式無段変速機CVTに対して入力される入力トルク方向が、駆動源(エンジン1、モータジェネレータ2)から駆動輪6,6へ向かうドライブ状態のとき、図2のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS5→ステップS11→ステップS12→エンドへと進む流れが繰り返される。
すなわち、ステップS3、ステップS4、ステップS5において、目標トルク指令値と、実トルク値と、図3の実線にて示すドライブ側油圧特性Dに基づいて、目標トルク対応プーリ油圧Ptdと実トルク対応プーリ油圧Prdが演算され、高い方の圧力がセレクトハイにより選択され、選択された油圧がドライブ側のプーリ油圧目標値Pd*と設定される。
すなわち、ステップS7、ステップS8、ステップS9において、目標トルク指令値と、実トルク値と、図4の実線にて示すコースト側油圧特性Cに基づいて、目標トルク対応プーリ油圧Ptdと実トルク対応プーリ油圧Prdが演算され、高い方の圧力がセレクトハイにより選択され、選択された油圧がコースト側のプーリ油圧目標値Pc*と設定される。
ここで、仮にドライブ側トルクTdとコースト側トルクTcの絶対値が同じであるとき、ドライブ側のプーリ油圧Pdと、コースト側のプーリ油圧Pcを比較すると、図3及び図4から明らかなように、Pd<Pcの関係となる。
すなわち、ステップS10において、目標トルク指令値と、実トルク値と、図3の破線にて示す低トルク側油圧特性Sに基づいて、目標トルク対応プーリ油圧Ptsと実トルク対応プーリ油圧Prsが演算され、高い方の圧力がセレクトハイにより選択され、選択された油圧が低トルク域のプーリ油圧目標値Ps*と設定される。
図5は、実施例1の制御装置が適用されたFFハイブリッド車両においてアクセル踏み込み操作からアクセル足離し操作を経由してブレーキ踏み込み操作を行ったときの各特性を示す。以下、図5に基づき、プーリ油圧制御作用を説明する。
これに対し、ドライブ状態から低トルク状態へと移行するとき、目標駆動トルク指令値に対して応答遅れを持つ実駆動トルク値により目標プーリ油圧P*を設定するようにしている。なお、図5のFで示す領域がプーリ油圧の後抜き領域をあらわす。このため、実駆動トルク値の低下に沿うように、プライマリ油圧Ppriとセカンダリ油圧Psecが徐々に低下させられることになり、アクセル足離し操作により低トルク状態へ移行する過渡領域のとき、ベルト44の滑りが防止される。
実施例1のベルト式無段変速機CVTの制御装置にあっては、下記に列挙する効果を得ることができる。
前記ベルト式無段変速機CVTに対して入力される入力トルク方向が、前記駆動源(エンジン1、モータジェネレータ2)からの入力トルクにより前記駆動輪(左右前輪6,6)を駆動させる方向のドライブ状態であるか、前記駆動輪(左右前輪6,6)からの入力トルクにより前記駆動源(エンジン1、モータジェネレータ2)を連れ回す方向のコースト状態であるかを判断する運転状態判断手段(図2のステップS2,S6)を有し、
前記プーリ油圧制御手段(図2)は、前記コースト状態であると判断されたとき、入力トルクに対するプーリ油圧を、前記ドライブ状態であると判断されたときの入力トルクに対するプーリ油圧より高く設定する。
このため、駆動輪(左右前輪6,6)からトルクが入力されるコースト状態において、ベルト伝達トルクの損失を招くベルトの滑りを抑制することができる。
前記プーリ油圧制御手段(図2)は、前記コースト状態であると判断されたとき、前記コースト用マップ(図4)を用いて目標プーリ油圧Pc*を設定する。
このため、(1)の効果に加え、ドライブ用マップ(図3)とコースト用マップ(図4)を用いることで、コースト状態であると判断されたとき、入力トルクに対するプーリ油圧を、ドライブ状態であると判断されたときの入力トルクに対するプーリ油圧より高く設定するプーリ油圧制御を容易に行うことができる。
このため、(2)の効果に加え、ブレーキ踏み込み操作によるコースト過渡領域のとき、油圧先入れによりベルト44の滑りを抑えることで、効率的な回生エネルギーの回収と良好な制動性能を確保することができる。
このため、(2)又は(3)の効果に加え、アクセル踏み込み操作によるドライブ過渡領域のとき、油圧先入れによりベルト44の滑りを抑えることで、良好な駆動性能を確保することができる。
前記運転状態判断手段(図2のステップS6)は、前記モータジェネレータ2により回生制動を行うとき、前記コースト状態であると判断する。
このため、(1)~(4)の効果に加え、モータジェネレータ2により回生制動を行う制動時や減速時、油圧先入れによりベルト44の滑りを抑えることで、高い回生発電効率を確保することができる。
また、実施例1の各マップに代えて、例えば、正の入力トルクをドライブ側、負の入力トルクをコースト側としたマップを適用することができる。この場合、読み込まれる目標トルク指令値と実トルク値にそれぞれ正負の符号を付与するようにしてもよい。例えば、EVモード又はHEVモードでのドライバーによるアクセル踏み込み操作時には、アクセル開度APOと車速VSPにより演算される目標駆動トルクをドライブ側、つまり正の符号を付与して目標トルク指令値とする。また、EVモードでは、モータ駆動電流値等の検出により得られる実モータ駆動トルク情報を実トルク値とし、HEVモードでは、モータジェネレータ2への実トルク値に、エンジン1の実駆動トルクを加えて正の符号を付与してドライブ側の実トルク値とする。
そして、EVモード又はHEVモードでのドライバーによるブレーキ踏み込み操作時であって、協調回生制御が行われるとき、演算される目標回生トルクに基づき、モータジェネレータ2へ出力する目標回生指令値は、負の符号を付与してコースト側の目標トルク指令値とする。また、協調回生制御中、モータ発電電流値等の検出により得られる実ジェネレータ制動トルク情報は、負の符号を付与してコースト側の実トルク値とする。
このような構成とした場合、入力トルクに正負の符号を付与する手段が運転状態判断手段に相当する。また、正負の符号が付与された入力トルクにそれぞれ対応する目標プーリ油圧を設定して、コースト状態であると判断されたとき、入力トルクに対するプーリ油圧を、ドライブ状態であると判断されたときの入力トルクに対するプーリ油圧より高く設定してもよい。
Claims (5)
- 駆動源に接続されたプライマリプーリと、駆動輪に接続されたセカンダリプーリと、前記プライマリプーリと前記セカンダリプーリに掛け渡されたベルトと、前記プライマリプーリと前記セカンダリプーリへのプーリ油圧を制御するプーリ油圧制御手段と、を備えたベルト式無段変速機の制御装置において、
前記ベルト式無段変速機に対して入力される入力トルク方向が、前記駆動源からの入力トルクにより前記駆動輪を駆動させる方向のドライブ状態であるか、前記駆動輪からの入力トルクにより前記駆動源を連れ回す方向のコースト状態であるかを判断する運転状態判断手段を有し、
前記プーリ油圧制御手段は、前記コースト状態であると判断されたとき、入力トルクに対するプーリ油圧を、前記ドライブ状態であると判断されたときの入力トルクに対するプーリ油圧より高く設定する、ベルト式無段変速機の制御装置。 - 請求項1に記載されたベルト式無段変速機の制御装置において、
ドライブ側トルクに対するプーリ油圧の関係を示すドライブ側油圧特性によるドライブ用マップと、コースト側トルクに対するプーリ油圧の関係を示すコースト側油圧特性であり、コースト側油圧特性の傾きを前記ドライブ側油圧特性よりも大きくして、同じ入力トルクの場合に、前記ドライブ用マップよりプーリ油圧が高くなるコースト用マップと、を有し、
前記プーリ油圧制御手段は、前記コースト状態であると判断されたとき、前記コースト用マップを用いて目標プーリ油圧を設定する、ベルト式無段変速機の制御装置。 - 請求項2に記載されたベルト式無段変速機の制御装置において、
前記プーリ油圧制御手段は、前記コースト状態であると判断されたとき、目標トルク指令値によるコースト側トルクと前記コースト側油圧特性を用いてコースト側の目標トルク対応プーリ油圧を演算し、実トルク値によるコースト側トルクと前記コースト側油圧特性を用いてコースト側の実トルク対応プーリ油圧を演算し、前記目標トルク対応プーリ油圧と前記実トルク対応プーリ油圧のセレクトハイにより目標プーリ油圧を設定する、ベルト式無段変速機の制御装置。 - 請求項2又は3に記載されたベルト式無段変速機の制御装置において、
前記プーリ油圧制御手段は、ドライブ状態であると判断されたとき、目標トルク指令値によるドライブ側トルクと前記ドライブ側油圧特性を用いてドライブ側の目標トルク対応プーリ油圧を演算し、実トルク値によるドライブ側トルクと前記ドライブ側油圧特性を用いてドライブ側の実トルク対応プーリ油圧を演算し、前記目標トルク対応プーリ油圧と前記実トルク対応プーリ油圧のセレクトハイにより目標プーリ油圧を設定する、ベルト式無段変速機の制御装置。 - 請求項1から4までの何れか1項に記載されたベルト式無段変速機の制御装置において、
前記駆動源は、モータジェネレータを有し、
前記運転状態判断手段は、前記モータジェネレータにより回生制動を行うとき、前記コースト状態であると判断する、ベルト式無段変速機の制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201480016466.9A CN105190110B (zh) | 2013-03-22 | 2014-02-03 | 带式无级变速器的控制装置 |
| KR1020157021285A KR101698712B1 (ko) | 2013-03-22 | 2014-02-03 | 벨트식 무단 변속기의 제어 장치 |
| US14/777,641 US9989150B2 (en) | 2013-03-22 | 2014-02-03 | Control device for belt-type continuously variable transmission |
| EP14769757.7A EP2977649B1 (en) | 2013-03-22 | 2014-02-03 | Belt-type continuously variable transmission |
| JP2015506636A JP5937751B2 (ja) | 2013-03-22 | 2014-02-03 | ベルト式無段変速機の制御装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013059807 | 2013-03-22 | ||
| JP2013-059807 | 2013-03-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014148124A1 true WO2014148124A1 (ja) | 2014-09-25 |
Family
ID=51579819
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/052375 WO2014148124A1 (ja) | 2013-03-22 | 2014-02-03 | ベルト式無段変速機の制御装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9989150B2 (ja) |
| EP (1) | EP2977649B1 (ja) |
| JP (1) | JP5937751B2 (ja) |
| KR (1) | KR101698712B1 (ja) |
| CN (1) | CN105190110B (ja) |
| WO (1) | WO2014148124A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016152354A1 (ja) * | 2015-03-23 | 2016-09-29 | ジヤトコ株式会社 | 車両制御装置、及び車両の制御方法 |
| WO2016152337A1 (ja) * | 2015-03-23 | 2016-09-29 | ジヤトコ株式会社 | 車両及び車両の制御方法 |
| WO2016174920A1 (ja) * | 2015-04-27 | 2016-11-03 | ジヤトコ株式会社 | 車両の表示回転数制御装置 |
| EP3273101A4 (en) * | 2015-03-20 | 2018-08-15 | Nissan Motor Co., Ltd. | Vehicle regenerative speed control device |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6196857B2 (ja) * | 2013-09-13 | 2017-09-13 | ジヤトコ株式会社 | 車両の制御装置 |
| WO2016021316A1 (ja) * | 2014-08-05 | 2016-02-11 | ジヤトコ株式会社 | 無段変速機の制御装置 |
| KR101673355B1 (ko) * | 2015-07-13 | 2016-11-16 | 현대자동차 주식회사 | 차량의 타력 주행 토크 제어시스템 및 이에 의한 제어방법 |
| US10514095B2 (en) * | 2015-09-09 | 2019-12-24 | Jatco Ltd | Control device and control method for continuously variable transmission mechanism for vehicle |
| US10619586B2 (en) | 2018-03-27 | 2020-04-14 | GM Global Technology Operations LLC | Consolidation of constraints in model predictive control |
| US10661804B2 (en) * | 2018-04-10 | 2020-05-26 | GM Global Technology Operations LLC | Shift management in model predictive based propulsion system control |
| CN108749643B (zh) * | 2018-04-17 | 2023-06-13 | 江西精骏电控技术有限公司 | 一种电动汽车启动扭矩方向检测装置及其检测方法 |
| US11421778B2 (en) * | 2018-09-10 | 2022-08-23 | Jatco Ltd | Hydraulic control device and hydraulic control method for automatic transmission |
| CN109322990B (zh) * | 2018-11-13 | 2020-01-14 | 安徽江淮汽车集团股份有限公司 | 一种滑行工况扭矩控制方法 |
| US10859159B2 (en) | 2019-02-11 | 2020-12-08 | GM Global Technology Operations LLC | Model predictive control of torque converter clutch slip |
| US11192561B2 (en) | 2019-05-21 | 2021-12-07 | GM Global Technology Operations LLC | Method for increasing control performance of model predictive control cost functions |
| US11312208B2 (en) | 2019-08-26 | 2022-04-26 | GM Global Technology Operations LLC | Active thermal management system and method for flow control |
| US11008921B1 (en) | 2019-11-06 | 2021-05-18 | GM Global Technology Operations LLC | Selective catalytic reduction device control |
| GB2594279B (en) * | 2020-04-21 | 2023-03-08 | Jaguar Land Rover Ltd | Belt integrated starter generator torque control |
| CN113503358B (zh) * | 2021-07-22 | 2022-07-01 | 湖南容大智能变速器股份有限公司 | 基于cvt液压系统的单压力传感器电磁阀自学习方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6252264A (ja) * | 1985-08-30 | 1987-03-06 | Fuji Heavy Ind Ltd | 無段変速機の油圧制御装置 |
| JPH0198747A (ja) * | 1987-10-09 | 1989-04-17 | Fuji Heavy Ind Ltd | 無段変速機の制御装置 |
| JP2001330126A (ja) * | 2000-05-23 | 2001-11-30 | Toyota Motor Corp | ベルト式無段変速機の制御装置 |
| JP2006336796A (ja) | 2005-06-03 | 2006-12-14 | Nissan Motor Co Ltd | ベルト式無段変速機の制御装置 |
| JP2013053641A (ja) * | 2011-09-01 | 2013-03-21 | Nissan Motor Co Ltd | 車両の回生発電制御装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2878925B2 (ja) * | 1993-03-31 | 1999-04-05 | 本田技研工業株式会社 | ベルト式無段変速機のプーリ側圧制御装置 |
| JP4821054B2 (ja) * | 2001-05-18 | 2011-11-24 | トヨタ自動車株式会社 | 車両用制御装置 |
| JP3912235B2 (ja) | 2002-09-10 | 2007-05-09 | トヨタ自動車株式会社 | 車両の油圧制御装置 |
| ATE388355T1 (de) | 2004-10-27 | 2008-03-15 | Bosch Gmbh Robert | Mit einer steuervorrichtung versehenes stufenloses getriebe |
| JP4375321B2 (ja) * | 2005-10-31 | 2009-12-02 | トヨタ自動車株式会社 | 無段変速機の変速制御装置 |
| JP4844493B2 (ja) * | 2007-07-27 | 2011-12-28 | トヨタ自動車株式会社 | ハイブリッド車の制御装置 |
| JP4211862B1 (ja) * | 2007-09-28 | 2009-01-21 | トヨタ自動車株式会社 | 無段変速機の制御装置 |
| JP5207925B2 (ja) * | 2008-11-11 | 2013-06-12 | 株式会社エフ・シー・シー | ハイブリッド車両の動力伝達装置 |
| JP2010127423A (ja) * | 2008-11-28 | 2010-06-10 | Toyota Motor Corp | 車両の制御装置 |
| JP4435857B1 (ja) * | 2009-04-30 | 2010-03-24 | 日産自動車株式会社 | ベルト式無段変速機の制御装置と制御方法 |
| JP5039819B2 (ja) * | 2010-09-01 | 2012-10-03 | ジヤトコ株式会社 | コーストストップ車両及びコーストストップ方法 |
| JP2013127287A (ja) * | 2011-12-19 | 2013-06-27 | Nissan Motor Co Ltd | Vベルト式無段変速機のベルト挟圧力制御装置 |
| US9415771B1 (en) * | 2012-11-16 | 2016-08-16 | Nissan Motor Co., Ltd. | Control device for a hybrid vehicle |
-
2014
- 2014-02-03 EP EP14769757.7A patent/EP2977649B1/en active Active
- 2014-02-03 US US14/777,641 patent/US9989150B2/en active Active
- 2014-02-03 JP JP2015506636A patent/JP5937751B2/ja active Active
- 2014-02-03 CN CN201480016466.9A patent/CN105190110B/zh active Active
- 2014-02-03 WO PCT/JP2014/052375 patent/WO2014148124A1/ja active Application Filing
- 2014-02-03 KR KR1020157021285A patent/KR101698712B1/ko active IP Right Grant
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6252264A (ja) * | 1985-08-30 | 1987-03-06 | Fuji Heavy Ind Ltd | 無段変速機の油圧制御装置 |
| JPH0198747A (ja) * | 1987-10-09 | 1989-04-17 | Fuji Heavy Ind Ltd | 無段変速機の制御装置 |
| JP2001330126A (ja) * | 2000-05-23 | 2001-11-30 | Toyota Motor Corp | ベルト式無段変速機の制御装置 |
| JP2006336796A (ja) | 2005-06-03 | 2006-12-14 | Nissan Motor Co Ltd | ベルト式無段変速機の制御装置 |
| JP2013053641A (ja) * | 2011-09-01 | 2013-03-21 | Nissan Motor Co Ltd | 車両の回生発電制御装置 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3273101A4 (en) * | 2015-03-20 | 2018-08-15 | Nissan Motor Co., Ltd. | Vehicle regenerative speed control device |
| US10246077B2 (en) | 2015-03-20 | 2019-04-02 | Nissan Motor Co., Ltd. | Vehicle regenerative speed control device |
| WO2016152354A1 (ja) * | 2015-03-23 | 2016-09-29 | ジヤトコ株式会社 | 車両制御装置、及び車両の制御方法 |
| WO2016152337A1 (ja) * | 2015-03-23 | 2016-09-29 | ジヤトコ株式会社 | 車両及び車両の制御方法 |
| KR20170117517A (ko) * | 2015-03-23 | 2017-10-23 | 쟈트코 가부시키가이샤 | 차량 및 차량의 제어 방법 |
| CN107429825A (zh) * | 2015-03-23 | 2017-12-01 | 加特可株式会社 | 车辆及车辆的控制方法 |
| JPWO2016152337A1 (ja) * | 2015-03-23 | 2017-12-21 | ジヤトコ株式会社 | 車両及び車両の制御方法 |
| CN107429825B (zh) * | 2015-03-23 | 2019-05-21 | 加特可株式会社 | 车辆及车辆的控制方法 |
| KR101994018B1 (ko) | 2015-03-23 | 2019-06-27 | 쟈트코 가부시키가이샤 | 차량 및 차량의 제어 방법 |
| WO2016174920A1 (ja) * | 2015-04-27 | 2016-11-03 | ジヤトコ株式会社 | 車両の表示回転数制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20150105414A (ko) | 2015-09-16 |
| EP2977649A4 (en) | 2017-04-19 |
| JPWO2014148124A1 (ja) | 2017-02-16 |
| CN105190110A (zh) | 2015-12-23 |
| JP5937751B2 (ja) | 2016-06-22 |
| CN105190110B (zh) | 2017-03-15 |
| EP2977649A1 (en) | 2016-01-27 |
| US9989150B2 (en) | 2018-06-05 |
| EP2977649B1 (en) | 2020-06-24 |
| US20160290502A1 (en) | 2016-10-06 |
| KR101698712B1 (ko) | 2017-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5937751B2 (ja) | ベルト式無段変速機の制御装置 | |
| JP5835500B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6115022B2 (ja) | 車両の制御装置 | |
| US9758158B2 (en) | Hybrid vehicle control device | |
| JP2010143308A (ja) | 車両の駆動トルク制御装置 | |
| JP6340605B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6860678B2 (ja) | 車両の制御装置および車両の制御方法 | |
| JP6409363B2 (ja) | ハイブリッド車両の制御装置 | |
| JP5453847B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6303783B2 (ja) | ハイブリッド車両の制御装置 | |
| JP6747583B2 (ja) | 電動車両の制御方法及び電動車両の制御装置 | |
| WO2014091838A1 (ja) | ハイブリッド車両の制御装置 | |
| JP6860679B2 (ja) | 車両の制御装置および車両の制御方法 | |
| JP2018069960A (ja) | 電動車両の制御装置 | |
| JP7232092B2 (ja) | 車両の制御装置 | |
| JP6207269B2 (ja) | ベルト式無段変速機の制御装置 | |
| JP6400148B2 (ja) | ベルト式無段変速機の制御装置 | |
| JP6329341B2 (ja) | 車両用制御装置 | |
| JP6355308B2 (ja) | ベルト式無段変速機の制御装置 | |
| JP2019031193A (ja) | 車両の制御装置及び車両の制御方法 | |
| JP5960658B2 (ja) | フライホイール回生システム及びその制御方法 | |
| JP2015036255A (ja) | ハイブリッド車両 | |
| JP6379063B2 (ja) | 車両及び車両の制御方法 | |
| JP2015030309A (ja) | 車両用駆動装置の制御装置 | |
| JP2015077860A (ja) | ハイブリッド車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201480016466.9 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14769757 Country of ref document: EP Kind code of ref document: A1 |
|
| DPE1 | Request for preliminary examination filed after expiration of 19th month from priority date (pct application filed from 20040101) | ||
| ENP | Entry into the national phase |
Ref document number: 2015506636 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 20157021285 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14777641 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014769757 Country of ref document: EP |