KR940003730B1 - 해저작업 시스템 - Google Patents
해저작업 시스템 Download PDFInfo
- Publication number
- KR940003730B1 KR940003730B1 KR1019890011525A KR890011525A KR940003730B1 KR 940003730 B1 KR940003730 B1 KR 940003730B1 KR 1019890011525 A KR1019890011525 A KR 1019890011525A KR 890011525 A KR890011525 A KR 890011525A KR 940003730 B1 KR940003730 B1 KR 940003730B1
- Authority
- KR
- South Korea
- Prior art keywords
- bogie
- submarine
- subsea
- hydraulic
- hydraulic cylinder
- Prior art date
Links
Images













Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/88—Dredgers; Soil-shifting machines mechanically-driven with arrangements acting by a sucking or forcing effect, e.g. suction dredgers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63C—LAUNCHING, HAULING-OUT, OR DRY-DOCKING OF VESSELS; LIFE-SAVING IN WATER; EQUIPMENT FOR DWELLING OR WORKING UNDER WATER; MEANS FOR SALVAGING OR SEARCHING FOR UNDERWATER OBJECTS
- B63C11/00—Equipment for dwelling or working underwater; Means for searching for underwater objects
- B63C11/52—Tools specially adapted for working underwater, not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/005—Manipulators mounted on wheels or on carriages mounted on endless tracks or belts
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Ocean & Marine Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Civil Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Structural Engineering (AREA)
- Jib Cranes (AREA)
- Drilling And Exploitation, And Mining Machines And Methods (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Underground Or Underwater Handling Of Building Materials (AREA)
- Mechanical Means For Catching Fish (AREA)
Abstract
내용 없음.
Description
제1도는 본 발명의 한 실시예에 의한 작업 상태도.
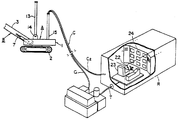
제2도는 제1도의 실시예의 주요부분의 사시도.
제3도는 해저자주용 대차와 원동장치의 평면도.
제4도는 해저자주용 대차의 사시도.
제5도는 해저에 내리는 도중의 상태도.
제6도는 해저자주용 대차를 크레인으로 달아내린 상태의 배면도.
제7도는 해저자주용 대차의 정면도.
제8도는 대차부 수중(水中) 비데오 카메라 부착 구조의 측면도.
제9도는 대차부 수중 비데오 카메라 부착 부분의 정면도.
제10도는 해저자주용 대차의 주행상태의 측면도.
제11도는 달아매는 포울 기초 부분의 분해 사시도.
제12도, 제13도는 다른 실시예의 작업용 어태치먼트 부분의 측면도.
제14도는 해저자주용 대차에 케이블용 관상 포울을 설치하지 않을 경우의 상태도.
* 도면의 주요부분에 대한 부호의 설명
A : 해저자주용 대차(海底自走用台車) B : 부옴(boom)
C : 케이블 D : 원동기
P : 액압펌프 R : 조종실
S : 해상작업선 K : 크레인
W : 와이퍼 G : 중심
2 : 주행부
10 : 작업용 어태치먼트(attachment)
13 : 달아매는 호울 15 : 케이블용 관상호울
16 : 부움부(boom 部) 탐조등 17 : 부움부 수중 비데오 카메라
18 : 대차부 탐조등 19 : 대차부 수중 비데오 카메라
24 : 모니터용 텔레비
본 발명은 깊이가 깊은 해저의 작업성이 극히 양호한 해저작업 시스템에 관한 것이다.
종래부터 해저작업을 효율적으로 실시하는 개발이 열심히 이루어져 왔다. 이 해저는, 예컨대 약 10m 등의 얕은 여울에서 작업하는 것은 육상의 작업기와 동등하여도 수압은 1기압의 증가로 끝나서 보통의 내연기관에서도 연료공급과 산소공급을 방수 구성의 기초에서 실행한다면 충분한 기계 효율을 얻을 수 있어 해저작업을 할 수 있다.
이것이, 예컨대 수심 약 30m∼50m에서도 확실한 방수를 실시하면, 효율은 저하하지만 사람없는 해저작업은 할 수 있다.
그런데, 수심 약 100m∼200m에서는 특히 수압의 문제가 발생한다. 즉, 해저작업기를 육상의 내연기관의 엔진을 사용하였다 하여도 기압에 의한 손실이 발생하여 엔진이 원활하게 회전하지 않을 뿐아니라, 대형의 엔진을 완전히 방수시키는 것은 극히 곤란하다. 이때문에 심해작업은 할 수 없다.
이상과 같이 깊이가 깊은 바다에서의 작업을 기계장치로 능률적으로 하는 것은 종래에는 거의 불가능하였다.
본 발명의 목적은 해저작업에 있어서의 작업용 기계 각부에 있어서의 구동 효율을 저하시키는 일이 없이 내구성에 뛰어난 해저작업 시스템을 제공함에 있다.
또, 본 발명의 다른 목적은 주행용 대차(走行用 台車)의 옆으로 구름을 방지하고, 저형변화에 따라서 옆으로 구름이 발생하여도 곧 이것을 회피할 수 있는 해저작업 시스템을 제공함에 있다.
나아가서, 본 발명의 그밖의 목적은 동력발달용의 각종 케이블 등을 일정한 상태로 유지함에 따라서 동력전달의 위험성을 방지한 해상작업 시스템을 제공함에 있다.
또, 본 발명의 또 다른 목적은 해저작업 위치의 작업환경을 해상에서 파악하여 작업의 확실성 및 안전성에 뛰어난 해상작업 시스템을 제공함에 있다.
그때문에 본 발명에 관한 해저작업 시스템은, 해저자주용 대차의 주행부 자주용 및 부움(boom) 선회용의 구동수단을 액압모우터 및 액압실린더라고 하여, 이것들 액압실린더 및 액압모우터를 작동시키는 액압펌프, 원동기를 포함한 구동원 및 조종실을 해상에 설치하고, 구동수단 및 구동원을 케이블 개재하여 연결한 것을 특징으로 하여 구성되어 있다.
다음에, 본 발명의 한 실시예를 도면에 따라서 설명한다.
A는 해저자주용 대차로서, 제1도, 제3도, 제4도에서 나타낸 바와 같이 대차본체(1)의 양측에는 주행부(2), (2)가 설치되어 있다. 그 주행부(2)는 전후의 구동륜(2a), (2a) 사이에 캐터필터(caterppilar)(2b)가 감겨져 있으며, 그 구동륜(2a)은 구동수단을 구성하는 액압모우터(M1)로 구동할 수 있도록 설치되어 있다. 상기 구동용 액압모우터(M1)는 내압, 방수기능을 구비하고 있으며, 특히 유압 또는 물 글리코올 등에 의하여 구동한다.
B는 적당히 굴신(屈伸)하는 부움(boom)으로서, 제1도에 나타낸 바와 같이 해저자주용 대차(A) 상에 설치되어 있다. 실시예에서는 그 부움(B)은 기초부분쪽의 제1아암(3)과, 중간의 제2아암(4)과, 선단의 제3아암(5)으로 구성되어 있다. 그 부움(B)의 기초부분인 제1아암(3)의 기초부분은 해저자주용 대차(A)의 진행측 전면의 대략 중앙에 설치한 선회기구(旋回機構)(6)에 단단히 부착되어 있다. 이 선회기구(6)는 액암모우터(M1)와 함께 구동수단을 구성하는 선회용 액압모우터(M2)로 구동할 수 있도록 설치되어 있다. 그 선회용 액압모우터(M2)도 구동용 액압모우터(M1)와 마찬가지로 내압, 방수기능을 구비하고 있으며, 특히 유압 또는 물 글리코올 등에 따라 구동한다. 그 구동용 액압모우터(M1), 선회용 액압모우터(M2)로서는 액압모우터 또는 플런저 모우터 등이고, 이것들을 총칭하고 구동수단으로서의 액압모우터라고 칭한다.
그 제1아암(3), 제2아암(4), 제3아암(5)을 각기 요동시키는 제1액압실린더(7)가 대차본체(1)와 제1아암(3) 사이에, 제2액압실린더(8)가 제1아암(3)과 제2아암(4) 사이에, 제3액압실린더(9)가 제2아암(4)과 제3아암(5) 사이에 각기 설치되어 있다.
(10)은 작업용 어태치먼트(attachment)로서, 제1도에 나타낸 바와 같이 제3아암(5)의 선단에 부착되어 가위 형상의 좌우의 집게부(10a), (10a)가 개폐용 액압실린더(10b)에 의하여 개폐할 수 있도록 구성되어 있다. 그 작업용 어태치먼트(10)에는 제3아암(5)과 작업용 어태치먼트(10)의 브래킷 사이에 설치된 링크(link)(12a), (12b)를 개재하여 제4액압실린더(11)가 설치되어 있다. 또, 그 작업용 어태치먼트(10)는 제12도에 표시한 바와 같이, 이것에는 개폐용 액압실린더(10b)는 설치하지 않고, 제4액압실린더(11)에서 개폐 가능하게 구성되어 있다. 이것은 붙잡기 위한 경우이고, 그 제4액압실린더(11)에 의한 링크(12a)의 동작에서 개폐 가능하게 설치되어 있다. 이러한 경우, 제3아암(5) 선단과 작업용 어태치먼트(10) 사이에 보조 피이스(piece)를 개재하여 부착되어 있다.
또, 제13도에 표시한 바와 같이, 버킷형(bucket type)의 것으로서 분할 버킷 (10c), (10c)이 개폐용 액압실린더(10b)로 개폐 가능하게 구성되어 있다.
상기한 제1액압실린더(7), 제2액압실린더(8), 제3액압실린더(9), 개폐용 액압실린더(10b) 및 제4액압실린더(11)를 총칭하여 간단히 구동수단으로서의 액압실린더라고 칭한다. 이 액압실린더도 내압 및 방수기능을 구비하고 있다.
(13)은 달아매는 포울(pole)이고, 대차본체(1)와 그 부움(B)의 제1아암(3)∼제3아암(5)을 제5도와 같이 접어갠 상태에서의 대략 중심(G) 위치인 대차본위(1)에 설치한 달아매는 보강부(14)의 대받침에 플랜지등을 개재하여 세워서 설치되어 있다(제1도, 제4도 참조).
(15)는 케이블이 휘감기는 것을 방지하는데 쓰는 케이블용 관상포울이며, 대차본위(1)의 후부에 달아매는 포울(13)과 동등한 높이로 세워서 설치되어 있다(제1도, 제5도 참조).
(16)은 부움부 탐조등(searching light)으로서, 부움(B) 선단의 작업용 어태치먼트(10) 부분 및 이러한 둘레를 비추도록 그 부움(B)의 적당한 장소에 설치되어 있다. 나아가서, 그 부움부 탐조등(16) 부분을 촬영하는 부움부 수중 비데오 카메라(17)도 여러곳에 설치되어 있다.
또, 대차보체(1)의 전후 좌우의 4곳에 대차부 참조등(18) 및 대차부수중 비데오 카메라(19)가 부착되어 있다(제3도 참조). 이 4곳의 대차부 수주 비데오 카메라(19)안의 안쪽위치의 좌우 대차부 수중 비데오 카메라(19), (19)는 제3도, 제7도∼제9도에 나타낸 바와 같이 대차본체(1)의 좌우에 돌출한 고정틀(20), (20)에 축받침한 설치대(20a), (20a)에 단단히 부착되어 있으며, 이 설치대(20a), (20a)는 카메라 액압실린더(21)로 대차부(台車部) 수중 비데오 카메라(19)를 상하방향으로 요동할 수 있게 된다.
그 부움부 수중 비데오 카메라(17) 및 대차부 수중 비데오 카메라(19)는 방수, 내압기능을 구비한 것이다.
P는 해상에 설치하는 액압펌프로서, 기어펌프 등이며, 고압(예컨대, 약 200㎏/㎠∼300㎏/㎠)의 배출압을 얻을 수 있도록 구성되어 있다.
D는 원동기로서, 디이젤 엔진 등의 내연기관, 증기터어빈, 전동모우터 등이고, 동력으로 변환하는 기계이다. 이 원동기(D)는 액압펌프(P)의 배출압이 고압이 되도록 기계적인 효율을 지니고 있다.
그 액압펌프(P)와 원동기(D) 및 제어밸브(V) 등으로 이루어지는 것을 구동원이라고 칭한다.
R은 조종실로서, 내부에 액압실린더 및 액압모우터의 제어용 조작간(22) 및 조종석(23)이 설치되어 있고, 그 전면에 부움부 수중 비데오 카메라(17), (17)…및 대차부 수중 비데오 카메라(19), (19)…의 모니터용 텔레비(24), (24)…가 설치되어 있다. 그 조작간(22)은 액압펌프(P)로 부터의 제어밸브(V)를 제어하도록 구성되어 있다. 상기 조작간(22) 부분과 제어밸브(V)는 배관(T)을 개재하여 연결되어 있다.
또, 그 액압펌프(P)와 액암모우터 사이, 및 액압펌프(P)와 액암실린더의 사이에는 액압용의 고압호오스(C1)가 설치되어 있으며, 또한 부움부 탐조등(16), (16)…및 대차부 탐조등(18), (18)…용의 전원케이블(C2)이 조종실(R)과의 사이에 설치되어 있다. 또, 모니터용 텔레비(24), (24)…와 부움부 수중 비데오 카메라(17), (17)…및 대차부 수중 비데오 카메라(19), (19)…의 사이에도 전원케이블(C2)이 설치되어 있다. 이것들 고압호오스(C2) 및 전원케이블(C2)을 총칭하여 간단한 케이블(C)이라고 한다.
S는 해상작업선으로서, 선상에 조종실(R), 원동기(D) 및 액압펌프(P)가 적재되어 있다. 이때문에, 깊이가 깊은 해저에서의 해저자주용 대차(A)와 해상작업선(S) 사이에 깊이분 만큼의 길이를 지닌 케이블(C)이 연결되어 있다(제1도 참조).
또, 달아매는 포울(13)의 상단은 제1도에 나타낸 바와 같이 해상작업선(S)에 설치된 크레인(crene)(K)으로부터 와이어(W1) 하단의 혹(H)에 와이어(W2)를 개재하여 드리우게 연결되어 있다. 더욱이, 이것들 와이어(W1), (W2)를 총칭하여 와이어(W)라고 칭한다.
상기 케이블(C)의 하단측은 케이블용 관상포울(15) 안으로 들어가 하단 가까이로 부터 각부에 배설되도록 구성되어 있다. 이에 따라서 해저자주용 대차(A)부분의 케이블(C)은 해상작업중에 주행 또는 선회하여도 부움(B) 등에 휘감기지 않도록 구성되어 있다.
제4도중 (25)는 수평위치 레벨센서, (26)은 집합음 마이크이며, 어느 것도 해저자주용 대차(A)의 내부에 설치되어 있다. (27)은 해저자주용 대차(A)의 후부에 설치한 무게추이다. 또, 도면에는 없으나 케이블용 관상포울(15)의 하단에도 무게추(27)가 설치되어 있다.
본 발명에서는 해저자주용 대차(A)가 해저에 착지한 다음 조종실(R)에서 작업인이 모니터용 텔레비(24)를 보면서 조종을 하고, 구동원을 작동시켜서 액압모우터와 액압실린더를 작동시킴으로써 해저자주용 대차(A)의 주행, 부움(B)의 요동, 작업용 어태치먼트(10)를 구동시킨다.
해저작업 종료후에는 작업용 대차(A)는 크레인에 감아 올려서 회수하던가, 그렇지 않으면 별도의 작업위치에 이동시켜서 이후 마찬가지로 하여 필요한 작업을 개시하게 된다.
본 발명은 해저자주용 대차(A)의 주행부(2) 구동용 및 부움(B) 선회용의 액압모우터 및 액압실린더를 각각 구비하고, 이들 액압실린더 및 액압모우터를 작동시키는 액압펌프(P), 원동기(D)를 포함하는 구동원 및 조종실(R)을 해상작업선에 설치하고, 그 액압펌프(P), 액압모우터 및 액압실린더를 고압호오스(C1)에 연결하고, 상기 해저자주용 대차(A)의 대략 중심(G) 위치에 세워서 설치한 달아매는 포울(13) 상단과 해상작업선(S)의 크레인(K)에서의 와이어(W)를 해저작업중에도 연결상태로 한 해저작업 시스템으로 함에 따라, 첫째로 해저자주용 대차(A)의 구동을 극히 좋은 효율로 할 수 있고, 둘째로 깊이가 깊이 해저에서 장시간에 걸쳐서 작업할 수 있으며, 세째로 해저자주용 대차(A)의 자주를 안정한 상태에서 작업할 수가 있는 등의 효과를 성취하였다.
이것들의 효과에 대하여 더욱 상세히 설명하면, 먼저 해주자주용 대차(A)에는 디이젤 엔진 등은 일체 없고, 주행부(2) 구동용 및 부움(B) 선회용의 구동수단으로서 액압모우터 및 액압실린더를 구비하고 있을 뿐이며, 그 액압모우터와 액압실린더는 액압용이기 때문에 하등의 가공을 가하지 않고라도 함께 내압, 방수에 뛰어나 있고, 구체적으로는 약 200㎏/㎠ 내외이기 때문에, 예컨대 수심 200m의 해저라 하여도 약 20기압(㎏/㎠)이며, 고압호오스(C2)의 길이가 길어서 손실을 고려하였다 하여도 충분한 압력을 얻을 수 있다.
또, 디이젤 엔진 등의 원동기(D)는 없고, 어디까지나 내압, 방수성을 지닌 액압실린더, 액압모우터이기 때문에 해저내에서의 문제는 거의 없앨 수 있고, 그 액압실린더 및 액압모우터를 구동시키는 액압펌프(P) 및 원동기(D)를 해상작업선(S)내에 설치하였기 때문에 대략 지상과 동일한 조건에서 작동시킬 수 있으며, 그 액압펌프(P) 및 원동기(D)의 기계적 효율을 충분한 것으로 할 수 있다. 나아가서, 이것들의 액압펌프(P), 액압모우터 및 액압실린더를 고압 호오스(C1)로 연결하여 그 케이블(C)의 길이가 길고, 길이에 의한 저항손실이 발생하였다 하여도 고압에 의한 액압이기 때문에 그 손실은 약간으로 되어 지상과 대략 같은 조건으로 극히 힘이 강한 해저자주용 대차(A)로 해저작업을 할 수 있는 커다란 효과가 있다.
또, 그 조종은 지상과 대략 같은 해상작업선(S)상에서 실시하기 때문에, 잠수 작업인과 같이 50m 내외의 해저에서 극히 단시간 작업만 가능하다고 하는 불합리는 없고, 어디까지나 동력삽(power shovel) 정도 또는 그 이상의 가동 효율로 해저에서 작업을 할 수 있는 이점이 있다.
다음에 이상과 같이, 해저자주용 대차(A)에는 그 주행부(2) 구동용 및 부움(B) 선회용의 액압모우터와, 부움(B) 요동용의 액압실린더를 구비함과 동시에, 해상작업선(S)에는 액압실린더 및 액압모우터를 구동시키는 액압펌프(P), 원동기(D)를 설치하여, 해저의 구동부분과 해상작업선(S)의 구동기관을 분리하고, 해저에서는 내압, 방수의 우수한 부분에서만 해저작업을 할 수 있으며, 해상 작업선(S)에서는 지상과 대략 같은 조건에서 디이젤 엔진 등의 원동기(D)를 구동할 수 있기 때문에, 예를 들면 해류 등의 영향으로 고압호오스(C1)에 저항이 가해지고, 또 깊이가 깊은 그 고압호오스(C1) 내의 손실이 크다고 하여도 그 해류 등에 의한 영향은 그 고압호오스(C1)의 내구성과 해저자주용 대차(A)의 중량에 의한 안정성과 해상작업선(S)으로 부터 해저자주용 대차(A)의 달아매는 태양을 충분히 고려하여 대략 극복된다.
더욱이 이와 같이, 해저자주용 대차(A)에는 그 주행부(2) 구동용 및 부움(B) 선회용의 액압모우터와, 부움(B) 요동용의 액압실린더를 구비함과 동시에, 해상작업선(S)에는 액압실린더 및 액압모우터를 작동시키는 액압펌프(P)와 원동기(D)를 설치하였으며, 산업용 기계에서는 간단한 구성과 같이 생각되지만 해저의 깊이가 깊은 위치에서도, 예를 들면 수심 약 200m에서도 충분히 작업할 수 있고, 그 작업이 지상작업에 필적할 정도로 할 수 있는 능률적이며, 더욱이 잠수부 등과는 근본적으로 차이가 있고, 기계적인 내구성이 있어 시간의 한도에서 작업할 수 있는 큰 효과가 있다.
또, 해저자주용 대차(A)의 대략 중심(G) 위치에 세워서 설치한 달아매는 포울(13) 상단과, 해상의 해상작업선(S)의 크레인(D)에서의 와이어(W)를 해저작업중에도 연결상태로 하였으므로, 그 해저자주용 대차(A)의 자주를 안정한 상태에서 작업할 수 있는 이점이 있다. 즉, 특히 해상작업선(S)으로 부터의 달아맨 해저자주용 대차(A)는 대략 중심(G) 위치에서 또한 이보다 높은 위치에서 달아매져서 해주자주용 대차(A)가 예기하지 않는 해저의 기복등에서 전도하도록 한 상황으로 되었다 하여도 그 상태를 감지한 다음에 크레인(K)으로 감아올리면 달아매는 호울(13)부분이 해저자주용 대차(A)가 대략 중심(G) 위치이며, 제5도에 나타낸 바와 같이 이보다 높이(h)만큼 높은 위치에서의 달아맨 상태로 되어서 흔들림에 대하여 상당히 안정시킬 수 있기 때문에, 해저자주용 대차(A)가 회전한다거나 예기할 수 없는 기울기가 없는 대략 평행한 상태에서 상승시킬 수 있고, 이에 따라서 해저자주용 대차(A)를 다시 세우는 것이 원활하게 할 수 있으며, 나아가서는 해저작업을 안정한 것으로 할 수 있는 효과가 있다. 또, 해저자주용 대차(A)를 크레인(K)으로부터 해중에 내릴 때에도 안정한 상태로 할 수 있다.
또한, 해저자주용 대차(A) 위에 케이블 휘감기 방지용의 케이블용 관상포울(15)을 세워서 설치하고, 해저자주용 대차(A) 주변의 케이블(C)은 케이블용 관상포울(15) 내에 수납하였으므로, 해저자주용 대차(A)에 의한 불의의 사고에 의한 케이블(C) 절단은 없다. 즉, 제어하기 어려운 깊이가 깊은 해저에서는 해저자주용 대차(A)가 주행하여 어떤 원인에 따라 제14도에 나타낸 바와 같이 테이블(C)을 밟아서 절단하는 위험성은 확실히 회피할 수 있다.
또, 제10도에 나타낸 바와 같이 해저자주용 대차(A)를 좌측으로 주행시켰다고 하여도 케이블용 관상포울(15)의 존재로 그 위쪽 위치의 케이블(C)이 이완될 뿐이고, 케이블(C)이 휘감기는 것과 같은 불편을 확실히 방지할 수 있다.
나아가서, 전술한 부움(B)에는 부움부 탐조등(16)과 부움부 수중 비데오 카메라(17)를, 해저자주용 대차(A)에는 대차부 탐조등(18)과 대차부 수중 비데오 카메라(19)를 각각 구비하였으며, 그것을 비데오 카메라에 의한 영상을 해상의 모니터용 텔레비(24), (24)…로 수상할 수 있도록 한 해저작업 시스템으로 하였으므로, 해상에서도 거의 목측관찰과 마찬가지로 안전 또한 확실한 해저작업을 할 수 있는 이점이 있다.
또, 케이블용 관상포울(15)의 주위에 케이블(C)의 권선용의 수용부를 설치하여, 케이블(C)이 느슨하여졌을 경우에 이 케이블(C)을 수용할 수 있도록 구성하면, 해저자주용 대차(A) 주위에 케이블(C)이 휘어감기는 것을 보다 유효하게 방지할 수 있다.
나아가서, 전술한 실시예에서는 해저작업용의 기계로서 해저자주용 대차(A)와 부움(B)으로 구성한 것을 나타내었으나, 이것은 한 예이고, 다른 구성으로 된 작업기계에도 적용할 수 있다.
Claims (8)
- 해저자주용 대차의 주행부 자주용 및 부움(boom) 선회용의 액압모우터와 부움 요동용이 액압실린더를 구비하고, 그 액압모우터 및 액압실린더를 작동시키는 액압펌프와 원동기를 포함하는 구동원 및 조종실을 해상작업선내에 설치하고, 상기 액압모우터와 상기 액압실린더 및 상기 구동원을 케이블을 개재하여 연결한 것을 특징으로 하는 해저작업 시스템.
- 해저자주용 대차는 여러개의 아암으로 이루어지는 부움과, 이 부움의 기초부분은 해저자주용 대차에 요동 가능하게 지됨과 동시에 선단에는 교환 가능한 작업용 어태치먼트가 설치되어 있고, 상기 저자주용 대차, 부움 및 작업용 어태치먼트의 구동수단과 ; 이 구동수단에 액압을 공급하기 위한 구동원과 ; 상기 해저자주용 대차를 달아맨 크레인 및 ; 상기 구동원과 상기 구동수단을 연결하는 케이블을 구비한 것을 특징으로 하는 해저작업 시스템.
- 제2항에 있어서, 해저자주용 대차에는 일정한 높이만큼 상방으로 돌출된 포울이 설치되었으며, 이 포울의 상단측에 크레인이 연결되어 있음을 특징으로 하는 해저작업 시스템.
- 제2항에 있어서, 해저자주용 대차에는 케이블 휘감기 방지용 수단이 설치되어 있음을 특징으로 하는 해저작업 시스템.
- 제4항에 있어서, 휘감기 방지용 수단은 해저자주용 대차상에 설치된 케이블용 관상 포울을 포함하고, 이 포울내에 케이블이 수용되어 있음을 특징으로 하는 해저작업 시스템.
- 제2항에 있어서, 구동수단은 액압모우터 및 액압실린더로 구성되어 있는 동시에, 구동원은 액압펌프 및 원동기로 구성되어 있음을 특징으로 하는 해저작업 시스템.
- 제2항에 있어서, 해저자주용 대차 및 부움 각 부분에는 탐조 등 및 카메라가 설치되어 있고, 이 카메라의 영상은 해상작업선에서 관찰 확인할 수 있음을 특징으로 하는 해저작업 시스템.
- 제3항에 있어서, 포울은 부움이 해저자주용 대차에 대하여 소정위치에 있을 때의 상기 해저자주용 대차 중심(重心) 상에 세워서 설치되어 있음을 특징으로 하는 해저작업 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP88-202517 | 1988-08-13 | ||
| JP63202517A JPH0253693A (ja) | 1988-08-13 | 1988-08-13 | 海底作業システム |
| JP63-202517 | 1988-08-13 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR900003489A KR900003489A (ko) | 1990-03-26 |
| KR940003730B1 true KR940003730B1 (ko) | 1994-04-28 |
Family
ID=16458801
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1019890011525A KR940003730B1 (ko) | 1988-08-13 | 1989-08-12 | 해저작업 시스템 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US5042959A (ko) |
| JP (1) | JPH0253693A (ko) |
| KR (1) | KR940003730B1 (ko) |
| AU (1) | AU609633B2 (ko) |
| CA (1) | CA1312350C (ko) |
| DE (1) | DE3926225A1 (ko) |
| FR (1) | FR2636038B1 (ko) |
| GB (1) | GB2221711B (ko) |
| IT (1) | IT1232431B (ko) |
| NL (1) | NL191235C (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150107512A (ko) * | 2014-03-14 | 2015-09-23 | 삼성중공업 주식회사 | 해저광물 채취용 장치 |
Families Citing this family (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2535550Y2 (ja) * | 1990-06-05 | 1997-05-14 | 三菱重工業株式会社 | 水中移動型検査装置 |
| JPH0725275U (ja) * | 1993-10-18 | 1995-05-12 | 順三 中元 | 燃料を使わない油圧タービンの船舶及び車輌 |
| US5868182A (en) * | 1996-04-04 | 1999-02-09 | Burton; Cyril | Submersible logging device |
| US6549139B2 (en) | 1997-02-27 | 2003-04-15 | Jack B. Shaw, Jr. | Crane safety device and methods |
| US6744372B1 (en) * | 1997-02-27 | 2004-06-01 | Jack B. Shaw | Crane safety devices and methods |
| US6894621B2 (en) * | 1997-02-27 | 2005-05-17 | Jack B. Shaw | Crane safety devices and methods |
| US6140930A (en) * | 1997-02-27 | 2000-10-31 | Shaw; Jack B. | Crane safety devices and methods |
| NO311639B1 (no) * | 2000-04-05 | 2001-12-27 | Gto Subsea As | Fremgangsmåte og anordning for å flytte på stein og lösmasser under vann |
| NO20003452L (no) * | 2000-07-04 | 2002-01-07 | Scanmudring As | Anordning ved undervannsfarkost |
| GB2377412A (en) * | 2000-11-03 | 2003-01-15 | Lawborough Consultants Ltd | Support vessel for self-burying mines |
| ITGE20010026A1 (it) * | 2001-03-20 | 2002-09-20 | Ts Tecnospamec S R L | Metodo per il taglio di strutture sommerse ed apparato atto a condurre tale metodo. |
| CA2353069C (en) * | 2001-07-13 | 2009-05-12 | Triton Logging Company Inc. | Method and apparatus for underwater tree cutting and retrieval |
| KR100442972B1 (ko) * | 2001-10-11 | 2004-08-04 | 한국해양연구원 | 수중 저면 오물 제거시스템 |
| US6928709B2 (en) * | 2001-10-19 | 2005-08-16 | Shell Oil Company | Apparatus for remote installation of devices for reducing drag and vortex induced vibration |
| US6695539B2 (en) * | 2001-10-19 | 2004-02-24 | Shell Oil Company | Apparatus and methods for remote installation of devices for reducing drag and vortex induced vibration |
| US6936820B2 (en) * | 2002-04-26 | 2005-08-30 | Bartlett Support Systems, Inc. | Crane mounted cargo container inspection apparatus and method |
| NL1022710C2 (nl) * | 2003-02-17 | 2004-08-19 | Mammoet Holding B V | Werkeiland en werkwijze voor het bergen van een wrak of wrakdelen. |
| KR100543778B1 (ko) * | 2003-08-26 | 2006-01-20 | 김원태 | 궤도를 구비한 수면 부상형 오니 준설기 |
| US7373935B2 (en) * | 2006-07-28 | 2008-05-20 | Oceaneering International, Inc. | Carbide wire blade |
| US7406905B2 (en) * | 2006-07-28 | 2008-08-05 | Oceaneering International, Inc | System for driving a wire loop cutting element |
| US9094082B1 (en) * | 2012-03-29 | 2015-07-28 | The United States Of America As Represented By The Secretary Of The Navy | System and method for remotely-operated deployment and retrieval of communication relays |
| US7926438B2 (en) * | 2007-11-05 | 2011-04-19 | Schlumberger Technology Corporation | Subsea operations support system |
| US20100083542A1 (en) * | 2008-10-07 | 2010-04-08 | Powers James M | Remotely operated submerged dredging system |
| JP4429376B1 (ja) * | 2009-06-03 | 2010-03-10 | 潔 斎藤 | 水中基礎均し装置 |
| US8096334B2 (en) * | 2009-07-31 | 2012-01-17 | Triton Logging, Inc. | Shallow water wood harvester |
| JP5681986B2 (ja) * | 2011-01-14 | 2015-03-11 | 新日鉄住金エンジニアリング株式会社 | 海底鉱床の採鉱方法およびその採鉱ユニット |
| NL2006153C2 (en) * | 2011-02-07 | 2012-08-08 | Heerema Marine Contractors Nl | Method and device for assembling or disassembling a structure under water. |
| CN102182462A (zh) * | 2011-04-22 | 2011-09-14 | 长沙矿山研究院 | 深海集矿机的履带除粘方法及装置 |
| CA2775641C (en) * | 2011-05-02 | 2014-07-08 | Hallin Marine Singapore Pte Ltd | Apparatus and methods of positioning a subsea object |
| GB2495950A (en) * | 2011-10-26 | 2013-05-01 | Ihc Engineering Business Ltd | Steerbale underwater trenching apparatus |
| GB2500656B (en) * | 2012-03-28 | 2018-09-12 | Pulse Structural Monitoring Ltd | ROV deployable clamp |
| NL2009005C2 (en) * | 2012-06-14 | 2013-12-17 | Heerema Marine Contractors Nl | Device and method for performing an operation on an at least partially submerged structure. |
| CN103204230B (zh) * | 2013-03-07 | 2015-09-09 | 中国船舶重工集团公司第七○二研究所 | 载人潜水器可收放可抛弃式采样篮 |
| CN103303449B (zh) * | 2013-05-30 | 2015-11-11 | 河北工业大学 | 一种水下作业机器人 |
| NL2011872C2 (en) * | 2013-11-29 | 2015-06-01 | Heerema Marine Contractors Nl | System and method for deploying/operating tool and heave compensation for same. |
| CN104084947B (zh) * | 2014-06-27 | 2015-12-02 | 哈尔滨工程大学 | 一种七功能水下机械臂系统 |
| CN105501414B (zh) * | 2015-01-16 | 2018-01-12 | 刘广 | 水下工程车 |
| CN104647365B (zh) * | 2015-03-06 | 2016-08-24 | 山东大学 | 一种液压驱动多关节工业机器人 |
| DE102015118540B4 (de) * | 2015-10-29 | 2021-12-02 | Geomar Helmholtz-Zentrum Für Ozeanforschung Kiel - Stiftung Des Öffentlichen Rechts | Tauchroboter-Bild-/Videodatenvisualisierungssystem |
| CN206170139U (zh) * | 2015-12-11 | 2017-05-17 | 广东技术师范学院 | 基于无线控制的智能机器人 |
| EP3257740B1 (en) | 2016-06-13 | 2019-08-14 | Korea Institute of Ocean Science and Technology | A glass sphere type pressure housing including titanium band and a multi-joint underwater robot system for deep sea exploration using the same |
| KR101693199B1 (ko) * | 2016-06-13 | 2017-01-06 | 한국해양과학기술원 | 티타늄 밴드를 포함하는 유리구 내압 용기 |
| CN106695748B (zh) * | 2016-12-09 | 2019-04-16 | 南京理工大学 | 一种双机械臂带电作业机器人 |
| US20210002857A1 (en) * | 2017-09-14 | 2021-01-07 | Sara Michal Sapir | System and methods for underwater works |
| DE102017129343A1 (de) * | 2017-12-08 | 2019-06-13 | Kuka Roboter Gmbh | Verfahren zur Vornahme mindestens eines Vorgangs und System zur Durchführung des Verfahrens |
| CN108622349B (zh) * | 2018-06-21 | 2019-09-03 | 中国船舶科学研究中心(中国船舶重工集团公司第七0二研究所) | 一种载人潜水器七自由度液压机械手抛弃装置 |
| US11155326B2 (en) * | 2019-03-29 | 2021-10-26 | The Hong Kong Polytechnic University | Bio-inspired underwater robot |
| CN109882180A (zh) * | 2019-04-28 | 2019-06-14 | 河海大学常州校区 | 一种履带式深海采矿车 |
| CN114274170A (zh) * | 2021-12-17 | 2022-04-05 | 镇江市高等专科学校 | 一种机械手旋转装置 |
| CN115716260B (zh) * | 2023-01-10 | 2023-04-14 | 安吉思防爆技术(苏州)有限公司 | 一种防爆式巡检工业机器人 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2987893A (en) * | 1956-10-29 | 1961-06-13 | American Mach & Foundry | Underwater craft |
| US3099913A (en) * | 1960-01-20 | 1963-08-06 | Gen Mills Inc | Underwater vehicle system |
| FR1314375A (fr) * | 1961-01-20 | 1963-01-11 | Gen Mills Inc | Véhicule sous-marin |
| US3105453A (en) * | 1961-11-24 | 1963-10-01 | Shell Oil Co | Ship control system |
| US3456371A (en) * | 1965-05-06 | 1969-07-22 | Kennecott Copper Corp | Process and apparatus for mining deposits on the sea floor |
| GB1227342A (ko) * | 1967-03-31 | 1971-04-07 | ||
| US3520358A (en) * | 1967-06-29 | 1970-07-14 | Mobil Oil Corp | Subsea production system |
| FR1553816A (ko) * | 1967-10-19 | 1969-01-17 | ||
| JPS492722Y1 (ko) * | 1968-10-18 | 1974-01-23 | ||
| US3583170A (en) * | 1969-01-28 | 1971-06-08 | Douwe Devries | Submerged pipeline entrenching apparatus and control systems for same |
| DE1961328A1 (de) * | 1969-09-17 | 1971-04-01 | Sub Sea Oil Services Ssos | Unterwasserbagger |
| US3683521A (en) * | 1970-03-05 | 1972-08-15 | Ocean Science & Eng | Submersible dredge |
| US3670514A (en) * | 1970-09-04 | 1972-06-20 | Fluor Corp | Automatic submarine trencher |
| US3719116A (en) * | 1971-09-22 | 1973-03-06 | C Burton | Underwater saw for tree and stump removal |
| IT951208B (it) * | 1972-04-07 | 1973-06-30 | Tecnomare Spa | Veicolo sottomarino per interrare cavi e condotte |
| FR2271346B1 (ko) * | 1974-01-22 | 1976-10-08 | Petroles Cie Francaise | |
| US3983707A (en) * | 1975-03-05 | 1976-10-05 | Georgy Mikhailovich Lezgintsev | Method and apparatus for moving an object on the bottom of a body of water |
| JPS5841236B2 (ja) * | 1975-08-28 | 1983-09-10 | ザイダンホウジン ニホンハクヨウキキカイハツキヨウカイ | スイテイチヨウサシヤリヨウ |
| JPS5323135A (en) * | 1976-04-16 | 1978-03-03 | Hitachi Ltd | Method of underwater work |
| US4010619A (en) * | 1976-05-24 | 1977-03-08 | The United States Of America As Represented By The Secretary Of The Navy | Remote unmanned work system (RUWS) electromechanical cable system |
| FR2376941A1 (fr) * | 1977-01-06 | 1978-08-04 | Diggs Richard | Equipement et procede pour recuperer les nodules du fond de la mer |
| NL165808C (nl) * | 1977-03-08 | 1981-05-15 | Ballast Nedam Groep Nv | Zuigbaggerinstallatie. |
| JPS5433042A (en) * | 1977-08-18 | 1979-03-10 | Fuji Photo Film Co Ltd | Thermal magnetic recording medium |
| DE2922996A1 (de) * | 1979-06-07 | 1980-12-18 | Buckau Wolf Maschf R | Vorrichtung zum loesen und aufnehmen von guetern des meeresbodens mittels eines verfahrbaren, ferngesteuerten grabgeraetes |
| JPS5876394A (ja) * | 1981-11-02 | 1983-05-09 | Nippon Kokan Kk <Nkk> | 水中作業装置 |
| JPS6037393A (ja) * | 1983-08-09 | 1985-02-26 | 川崎重工業株式会社 | 海中・海底作業ロボツトシステム |
| JPS6055132A (ja) * | 1983-08-31 | 1985-03-30 | Kinzo Ri | ダム用の自走式土砂かくはんサイホン排土装置 |
| FR2555248B1 (fr) * | 1983-11-21 | 1986-02-21 | Elf Aquitaine | Engin de pose, d'activation et de connexion des modules d'une station de production petroliere sous-marine |
| GB2176153B (en) * | 1985-06-10 | 1988-10-12 | Nobuhiko Miyanagi | Underwater ground working apparatus |
| GB2181040A (en) * | 1985-10-02 | 1987-04-15 | John Cameron Robertson | Remotely-operated vehicle for cleaning offshore structures |
| JPS63251394A (ja) * | 1987-04-08 | 1988-10-18 | Mitsubishi Heavy Ind Ltd | 水中機器の浮沈方法 |
-
1988
- 1988-08-13 JP JP63202517A patent/JPH0253693A/ja active Granted
-
1989
- 1989-07-27 GB GB8917199A patent/GB2221711B/en not_active Expired - Fee Related
- 1989-07-28 CA CA000606981A patent/CA1312350C/en not_active Expired - Fee Related
- 1989-08-01 US US07/388,083 patent/US5042959A/en not_active Expired - Fee Related
- 1989-08-04 AU AU39334/89A patent/AU609633B2/en not_active Ceased
- 1989-08-08 DE DE3926225A patent/DE3926225A1/de active Granted
- 1989-08-10 NL NL8902043A patent/NL191235C/xx not_active IP Right Cessation
- 1989-08-11 IT IT8967698A patent/IT1232431B/it active
- 1989-08-11 FR FR8910846A patent/FR2636038B1/fr not_active Expired - Fee Related
- 1989-08-12 KR KR1019890011525A patent/KR940003730B1/ko not_active IP Right Cessation
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150107512A (ko) * | 2014-03-14 | 2015-09-23 | 삼성중공업 주식회사 | 해저광물 채취용 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| NL8902043A (nl) | 1990-03-01 |
| DE3926225C2 (ko) | 1993-05-27 |
| GB2221711B (en) | 1992-09-02 |
| IT1232431B (it) | 1992-02-17 |
| DE3926225A1 (de) | 1990-02-15 |
| FR2636038A1 (fr) | 1990-03-09 |
| NL191235B (nl) | 1994-11-01 |
| IT8967698A0 (it) | 1989-08-11 |
| KR900003489A (ko) | 1990-03-26 |
| AU3933489A (en) | 1990-02-15 |
| AU609633B2 (en) | 1991-05-02 |
| GB8917199D0 (en) | 1989-09-13 |
| NL191235C (nl) | 1995-04-03 |
| JPH0253693A (ja) | 1990-02-22 |
| US5042959A (en) | 1991-08-27 |
| GB2221711A (en) | 1990-02-14 |
| FR2636038B1 (fr) | 1995-05-05 |
| CA1312350C (en) | 1993-01-05 |
| JPH0418117B2 (ko) | 1992-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR940003730B1 (ko) | 해저작업 시스템 | |
| US4318641A (en) | Method for securing a tubular element to the bottom of a body of water and apparatus for carrying out this method | |
| US1997149A (en) | Submarine locating, harvesting, and recovery apparatus | |
| US5722793A (en) | Method and device for continuously laying and burying a flexible submarine conduit | |
| JPS5830894A (ja) | 船の推進装置 | |
| US20120210926A1 (en) | Dc powered rov and umbilical | |
| EP2458972B1 (en) | Shallow water wood harvester | |
| RU97108291A (ru) | Погружной буй с якорным креплением на опорах в виде цепи | |
| JPH09511469A (ja) | 海の沖からの炭化水素の搬送並びに製造並びに/もしくは充填/排出、並びに/もしくは良好に取り扱うための船 | |
| US20140311397A1 (en) | Workstation for transporting equipment to an underwater position | |
| BRPI0711911A2 (pt) | sistema de lanÇamento para lanÇar equipamento a partir de uma embarcaÇço, e, embarcaÇço | |
| JP4046154B2 (ja) | 水中航走体 | |
| JP2854080B2 (ja) | 海底ケーブル布設船 | |
| CA2429972A1 (en) | System and method for towing a shellfish dredge | |
| KR102382466B1 (ko) | 로프형 계류라인 수중 청소로봇 | |
| JPH02501135A (ja) | 遠隔制御型自己推進式水中艇 | |
| JPS60501154A (ja) | プロペラ推進装置取付け部材 | |
| JPH0431200Y2 (ko) | ||
| CN206552215U (zh) | 一种深水海底电缆敷设船 | |
| CN111498029A (zh) | 一种海底捕捞辅助装置 | |
| CN212927767U (zh) | 可倾斜作业的液下作业装置 | |
| CN214399392U (zh) | 一种用于rov的脐带缆管理系统 | |
| KR101555957B1 (ko) | 매설된 해저케이블의 복구방법 | |
| JPS5818432Y2 (ja) | 水中用ケ−ブル中継装置 | |
| CN117465636A (zh) | 一种水下结构物表面缺陷检测机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E902 | Notification of reason for refusal | ||
| G160 | Decision to publish patent application | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| LAPS | Lapse due to unpaid annual fee |