JP6785671B2 - 作業車 - Google Patents
作業車 Download PDFInfo
- Publication number
- JP6785671B2 JP6785671B2 JP2017008345A JP2017008345A JP6785671B2 JP 6785671 B2 JP6785671 B2 JP 6785671B2 JP 2017008345 A JP2017008345 A JP 2017008345A JP 2017008345 A JP2017008345 A JP 2017008345A JP 6785671 B2 JP6785671 B2 JP 6785671B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- control unit
- vehicle body
- unit
- vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/062—Details, component parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/09—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle characterised by means for actuating valves
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D49/00—Tractors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/08—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle characterised by type of steering valve used
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/225—Control of steering, e.g. for hydraulic motors driving the vehicle tracks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/20—Off-Road Vehicles
- B60Y2200/22—Agricultural vehicles
- B60Y2200/221—Tractors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D49/00—Tractors
- B62D49/06—Tractors adapted for multi-purpose use
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Guiding Agricultural Machines (AREA)
- Power Steering Mechanism (AREA)
Description
本発明に係る作業車は、左右のサイドメンバ及び前記左右のサイドメンバに亘って取り付けられたクロスメンバを有する車体フレームと、前記クロスメンバに支持されることにより前記車体フレームに支持された車輪支持部材と、前記車輪支持部材に操舵可能に支持された左右の操舵輪と、パワーステアリングユニットを有して前記左右の操舵輪を操舵するステアリング機構とを備え、
前記パワーステアリングユニットは、前記左右の操舵輪に連係された油圧式のステアリングシリンダと、前記ステアリングシリンダに作用する油圧を制御する油圧制御ユニットとを備え、
前記油圧制御ユニットは、平面視で前記車輪支持部材に対して前側の前記クロスメンバと重複するように前記前側のクロスメンバの上方に配置され、且つ、前記左右のサイドメンバの間に配置された状態で、前記車体フレームに支持されている。
本発明をより好適にするための手段の一つとして、
前記ステアリングシリンダが、平面視で前記車輪支持部材に対して前側に配置された状態で、前記前側のクロスメンバの下方に配置されている。
手動操舵用のステアリングホイールと、車体を自動で運転する自動運転用の電子制御システムとを備え、
前記油圧制御ユニットは、前記ステアリングシリンダに対するオイルの流れを制御するパイロット式のステアリングバルブと、前記ステアリングホイールの回動操作量に応じて前記ステアリングバルブに対するパイロット流量を制御する手動式の第1パイロットバルブと、前記電子制御システムからの制御指令に基づいて前記ステアリングバルブに対するパイロット流量を制御する電動式の第2パイロットバルブとを備えている。
前記油圧制御ユニットを上方から覆う位置に配置された仕切板と、前記仕切板の上面との間に冷却風路を形成するボンネットと、前記仕切板における冷却方向下手側の端部に連接されたラジエータとを備え、
前記仕切板には、前記第2パイロットバルブに備えたハーネス接続用のカプラを上方に臨ませる開口が形成され、かつ、前記開口と前記カプラとの間に形成された隙間を塞ぐ遮蔽部材が取り付けられている。
前記油圧制御ユニットに備えられた複数の接続ポートにねじ込み接続されるL字型の複数の管継手を備え、
複数の前記管継手のうち、近接する前記接続ポートに接続される管継手は、前記接続ポートに接続されたときに、隣接する一方の管継手が他方の管継手の内側に位置するように、前記油圧制御ユニットからの延出長さが異なる長さに設定されている。
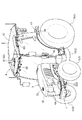
尚、図1に記載された符号Fの矢印が指し示す方向がトラクタの前側であり、符号Uの矢印が指し示す方向がトラクタの上側である。
又、図2に記載された符号Fの矢印が指し示す方向がトラクタの前側であり、符号Rの矢印が指し示す方向がトラクタの右側である。
協調運転制御部30Eは、進行方向での車間距離が適正距離よりも長い場合は、走行制御部30Aに増速指令を出力する。これにより、協調運転制御部30Eは、走行制御部30Aの制御作動によって主変速装置32を増速作動させて、進行方向での車間距離を適正距離に復帰させる。そして、協調運転制御部30Eは、進行方向での車間距離が適正距離に復帰するのに伴って、自動運転制御部30Cの制御作動に基づく自動運転を再開させることにより、車速を通常走行用の設定速度まで低下させて進行方向での車間距離を適正距離に維持する。
協調運転制御部30Eは、併走方向での車間距離が適正距離よりも長い場合は、走行制御部30Aに他車側への操舵指令を出力する。これにより、協調運転制御部30Eは、走行制御部30Aの制御作動によって左右の前輪9を他車側に操舵させて、併走方向での車間距離を適正距離に復帰させる。そして、協調運転制御部30Eは、併走方向での車間距離が適正距離に復帰するのに伴って、自動運転制御部30Cの制御作動に基づく自動運転を再開させることにより、車体の進行方向を通常走行用の進行方向に戻して併走方向での車間距離を適正距離に維持する。
協調運転制御部30Eは、併走方向での車間距離が適正距離よりも短い場合は、走行制御部30Aに他車から離れる側への操舵指令を出力する。これにより、協調運転制御部30Eは、走行制御部30Aの制御作動によって左右の前輪9を他車から離れる側に操舵させて、併走方向での車間距離を適正距離に復帰させる。そして、協調運転制御部30Eは、併走方向での車間距離が適正距離に復帰するのに伴って、自動運転制御部30Cの制御作動に基づく自動運転を再開させることにより、車体の進行方向を通常走行用の進行方向に戻して併走方向での車間距離を適正距離に維持する。
これにより、自車を、先行する他車に対して、進行方向での車間距離と併走方向での車間距離とを訂正に維持しながら自動で適正に併走させることができる。
本発明は、上記の実施形態で例示した構成に限定されるものではなく、以下、本発明に関する代表的な別実施形態を例示する。
例えば、作業車は、左右の後輪10に代えて左右のクローラを備えるセミクローラ仕様に構成されていてもよい。
例えば、作業車は、左右の後輪10が操舵輪であってもよく、又、左右の前輪9と左右の後輪10との双方が操舵輪であってもよい。
例えば、作業車は、左右の前輪9と左右の後輪10とのいずれか一方が駆動される二輪駆動式であってもよい。
例えば、作業車は、エンジン6の代わりに電動モータを備える電動仕様に構成されていてもよい。
例えば、作業車は、エンジン6と電動モータとを備えるハイブリッド仕様に構成されていてもよい。
例えば、作業車は、キャビン4に代えて保護フレームを備えていてもよい。
1 車体フレーム
11 車輪支持部材
14 ラジエータ
16 ボンネット
19 ステアリングホイール
24 パワーステアリングユニット
25 ステアリング機構
51 電子制御システム
55 ステアリングシリンダ
56 油圧制御ユニット
57 ステアリングバルブ
58 第1パイロットバルブ
59 第2パイロットバルブ
59A カプラ
80 サイドメンバ
82 クロスメンバ
86 仕切板
86A 開口
87 遮蔽部材
89A 管継手
89B 管継手
89C 管継手
89D 管継手
89E 管継手
Claims (5)
- 左右のサイドメンバ及び前記左右のサイドメンバに亘って取り付けられたクロスメンバを有する車体フレームと、前記クロスメンバに支持されることにより前記車体フレームに支持された車輪支持部材と、前記車輪支持部材に操舵可能に支持された左右の操舵輪と、パワーステアリングユニットを有して前記左右の操舵輪を操舵するステアリング機構とを備え、
前記パワーステアリングユニットは、前記左右の操舵輪に連係された油圧式のステアリングシリンダと、前記ステアリングシリンダに作用する油圧を制御する油圧制御ユニットとを備え、
前記油圧制御ユニットは、平面視で前記車輪支持部材に対して前側の前記クロスメンバと重複するように前記前側のクロスメンバの上方に配置され、且つ、前記左右のサイドメンバの間に配置された状態で、前記車体フレームに支持されている作業車。 - 前記ステアリングシリンダが、平面視で前記車輪支持部材に対して前側に配置された状態で、前記前側のクロスメンバの下方に配置されている請求項1に記載の作業車。
- 手動操舵用のステアリングホイールと、車体を自動で運転する自動運転用の電子制御システムとを備え、
前記油圧制御ユニットは、前記ステアリングシリンダに対するオイルの流れを制御するパイロット式のステアリングバルブと、前記ステアリングホイールの回動操作量に応じて前記ステアリングバルブに対するパイロット流量を制御する手動式の第1パイロットバルブと、前記電子制御システムからの制御指令に基づいて前記ステアリングバルブに対するパイロット流量を制御する電動式の第2パイロットバルブとを備えている請求項1又は2に記載の作業車。 - 前記油圧制御ユニットを上方から覆う位置に配置された仕切板と、前記仕切板の上面との間に冷却風路を形成するボンネットと、前記仕切板における冷却方向下手側の端部に連接されたラジエータとを備え、
前記仕切板には、前記第2パイロットバルブに備えたハーネス接続用のカプラを上方に臨ませる開口が形成され、かつ、前記開口と前記カプラとの間に形成された隙間を塞ぐ遮蔽部材が取り付けられている請求項3に記載の作業車。 - 前記油圧制御ユニットに備えられた複数の接続ポートにねじ込み接続されるL字型の複数の管継手を備え、
複数の前記管継手のうち、近接する前記接続ポートに接続される管継手は、前記接続ポートに接続されたときに、隣接する一方の管継手が他方の管継手の内側に位置するように、前記油圧制御ユニットからの延出長さが異なる長さに設定されている請求項1〜4のいずれか一項に記載の作業車。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017008345A JP6785671B2 (ja) | 2017-01-20 | 2017-01-20 | 作業車 |
| KR1020197012501A KR102456874B1 (ko) | 2017-01-20 | 2017-12-26 | 작업차 |
| EP17892273.8A EP3572302B1 (en) | 2017-01-20 | 2017-12-26 | Work vehicle |
| CN201780070816.3A CN109963771B (zh) | 2017-01-20 | 2017-12-26 | 作业车 |
| US16/469,650 US11186312B2 (en) | 2017-01-20 | 2017-12-26 | Work vehicle |
| PCT/JP2017/046692 WO2018135257A1 (ja) | 2017-01-20 | 2017-12-26 | 作業車 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017008345A JP6785671B2 (ja) | 2017-01-20 | 2017-01-20 | 作業車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018114923A JP2018114923A (ja) | 2018-07-26 |
| JP6785671B2 true JP6785671B2 (ja) | 2020-11-18 |
Family
ID=62909100
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017008345A Active JP6785671B2 (ja) | 2017-01-20 | 2017-01-20 | 作業車 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11186312B2 (ja) |
| EP (1) | EP3572302B1 (ja) |
| JP (1) | JP6785671B2 (ja) |
| KR (1) | KR102456874B1 (ja) |
| CN (1) | CN109963771B (ja) |
| WO (1) | WO2018135257A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6785671B2 (ja) | 2017-01-20 | 2020-11-18 | 株式会社クボタ | 作業車 |
| JP6863358B2 (ja) * | 2018-10-26 | 2021-04-21 | 井関農機株式会社 | 作業車両 |
| JP7233950B2 (ja) | 2019-02-14 | 2023-03-07 | 株式会社クボタ | 農業機械 |
| JP6766240B1 (ja) * | 2019-09-06 | 2020-10-07 | 株式会社クボタ | 作業車両 |
| US20220413165A1 (en) * | 2020-02-26 | 2022-12-29 | Texaroba Technology Inc. | Lawn profile data collecting tool |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61122974U (ja) | 1985-01-22 | 1986-08-02 | ||
| JPH0415586Y2 (ja) * | 1986-03-17 | 1992-04-08 | ||
| JPH0629172Y2 (ja) * | 1987-12-29 | 1994-08-10 | 三菱農機株式会社 | トラクタの油圧装置における配管取付装置 |
| JPH03276883A (ja) * | 1990-03-26 | 1991-12-09 | Iseki & Co Ltd | トラクターのカバー装置 |
| JPH07300075A (ja) * | 1994-05-09 | 1995-11-14 | Kubota Corp | 作業車のパワーステアリング構造 |
| JPH10266260A (ja) * | 1997-03-26 | 1998-10-06 | Kubota Corp | 作業機の油圧管類の配設構造 |
| JP2000128032A (ja) * | 1998-10-26 | 2000-05-09 | Iseki & Co Ltd | トラクタのステアリング装置 |
| JP3535079B2 (ja) * | 2000-06-27 | 2004-06-07 | 日本車輌製造株式会社 | 建設機械の油圧配管構造 |
| JP2003261501A (ja) * | 2002-01-07 | 2003-09-19 | Mitsubishi Chemicals Corp | 気相接触酸化方法 |
| JP3872992B2 (ja) * | 2002-03-08 | 2007-01-24 | カヤバ工業株式会社 | 自動操舵システム |
| JP3894823B2 (ja) * | 2002-03-29 | 2007-03-22 | 株式会社クボタ | トラクタ |
| JP4458531B2 (ja) | 2004-10-01 | 2010-04-28 | ヤンマー株式会社 | 作業車両 |
| GB0902988D0 (en) | 2009-02-21 | 2009-04-08 | Jcb Landpower Ltd | Hybrid steering system |
| US8807265B2 (en) | 2011-09-14 | 2014-08-19 | Kubota Corporation | Tractor |
| JP5654968B2 (ja) | 2011-09-14 | 2015-01-14 | 株式会社クボタ | トラクタ |
| JP6066808B2 (ja) | 2013-04-10 | 2017-01-25 | 株式会社クボタ | 作業車 |
| GB2529746A (en) * | 2013-06-07 | 2016-03-02 | Jc Bamford Excavators Ltd | A steering arrangement |
| JP6401568B2 (ja) * | 2014-10-16 | 2018-10-10 | ヤンマー株式会社 | トラクタ |
| US10611403B2 (en) | 2015-06-23 | 2020-04-07 | Eaton Intelligent Power Limited | Steering device for construction/transport/farm machine |
| US9796406B2 (en) * | 2015-07-02 | 2017-10-24 | Kubota Corporation | Electric power steering unit with offset link mechanism |
| CN205499046U (zh) * | 2015-12-29 | 2016-08-24 | 天津市达昆电子科技有限公司 | 一种自动驾驶转向控制系统 |
| JP6785671B2 (ja) | 2017-01-20 | 2020-11-18 | 株式会社クボタ | 作業車 |
-
2017
- 2017-01-20 JP JP2017008345A patent/JP6785671B2/ja active Active
- 2017-12-26 EP EP17892273.8A patent/EP3572302B1/en active Active
- 2017-12-26 US US16/469,650 patent/US11186312B2/en active Active
- 2017-12-26 WO PCT/JP2017/046692 patent/WO2018135257A1/ja unknown
- 2017-12-26 KR KR1020197012501A patent/KR102456874B1/ko active IP Right Grant
- 2017-12-26 CN CN201780070816.3A patent/CN109963771B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018135257A1 (ja) | 2018-07-26 |
| EP3572302A1 (en) | 2019-11-27 |
| CN109963771B (zh) | 2022-12-20 |
| JP2018114923A (ja) | 2018-07-26 |
| KR102456874B1 (ko) | 2022-10-21 |
| CN109963771A (zh) | 2019-07-02 |
| KR20190108555A (ko) | 2019-09-24 |
| EP3572302A4 (en) | 2020-11-04 |
| US20190315393A1 (en) | 2019-10-17 |
| US11186312B2 (en) | 2021-11-30 |
| EP3572302B1 (en) | 2022-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102493698B1 (ko) | 작업차 | |
| KR102443415B1 (ko) | 작업차 | |
| JP6785671B2 (ja) | 作業車 | |
| JP6837902B2 (ja) | 作業車 | |
| JP6781055B2 (ja) | 作業車 | |
| JP6742928B2 (ja) | 作業車 | |
| JP6615823B2 (ja) | 作業車 | |
| JP6669678B2 (ja) | 作業車 | |
| JP2018114925A (ja) | 作業車 | |
| JP6837903B2 (ja) | 作業車 | |
| JP6781056B2 (ja) | 作業車 | |
| JP6873211B2 (ja) | 作業車 | |
| JP7094337B2 (ja) | 作業車 | |
| JP6832716B2 (ja) | 作業車 | |
| JP7475295B2 (ja) | 作業車 | |
| JP7509850B2 (ja) | 作業車 | |
| JP7058679B2 (ja) | 作業車 | |
| JP7094338B2 (ja) | 作業車 | |
| JP6972215B2 (ja) | 作業車及び協調制御システム | |
| JP6991285B2 (ja) | 作業車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190626 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200512 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200708 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200929 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201027 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6785671 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |