JP6083428B2 - 車両の電動パワーステアリング装置 - Google Patents
車両の電動パワーステアリング装置 Download PDFInfo
- Publication number
- JP6083428B2 JP6083428B2 JP2014253575A JP2014253575A JP6083428B2 JP 6083428 B2 JP6083428 B2 JP 6083428B2 JP 2014253575 A JP2014253575 A JP 2014253575A JP 2014253575 A JP2014253575 A JP 2014253575A JP 6083428 B2 JP6083428 B2 JP 6083428B2
- Authority
- JP
- Japan
- Prior art keywords
- rotation angle
- failure
- steering
- motor
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/049—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures detecting sensor failures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/244—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing characteristics of pulses or pulse trains; generating pulses or pulse trains
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/12—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving photoelectric means
Description
本発明は、運転者の操舵操作に基づいてモータを駆動して操舵アシストトルクを発生する車両の電動パワーステアリング装置に関する。
従来から、電動パワーステアリング装置は、ドライバーが操舵ハンドルに入力した操舵トルクをトルクセンサにより検出し、検出した操舵トルクに基づいて目標操舵アシストトルクを計算する。そして、目標操舵アシストトルクが得られるようにモータに流す電流を制御することにより、ドライバーの操舵操作をアシストする。
電動パワーステアリング装置のモータとして、回転角センサを必要とするモータが使用される場合がある。例えば、3相永久磁石モータなどのブラシレスモータを使用した場合には、回転角センサによりモータ電気角を検出して、3相の位相を制御する必要がある。
回転角センサが故障した場合には、モータの位相を制御することができなくなる。そこで、例えば、特許文献1に提案されているように、2系統の回転角センサを設けた電動パワーステアリングも知られている。
2系統の回転角センサを設けた場合には、回転角センサ同士の検出信号を比較することによって、2つの検出値が乖離している場合には、どちらかの回転角センサに故障が発生していると判定できる。しかし、1系統の回転角センサの故障が検出された後の、残りの1系統の回転角センサの故障については、精度良く検出できない可能性がある。回転角センサ同士の検出信号の比較を行うことができないからである。
例えば、回転角センサの検出信号(例えば、電圧信号)の大きさが想定範囲から外れている場合などでは、1系統の回転角センサの故障を単独で検出することができる。しかし、検出信号の大きさが想定範囲内で中間値に固定されてしまう故障(信号線の短絡による故障など)に対しては、故障により検出値が固定されているのか、操舵ハンドルがロックしているのか判別ができない。このため、残りの1系統の回転角センサの故障を適正に監視することができない。1系統の回転角センサの故障が検出されたとき、残りの1系統の回転角センサが故障であるか否かを精度良く判定することが困難であることを考慮すると、実際には残りの系統回転角センサが正常であっても操舵アシスト制御を停止せざるを得なくなる。
結局、2系統の回転角センサを設けても、最初の1系統目の回転角センサの故障検出精度は向上するものの、その後の残りの1系統の回転角センサを有効活用できていない。
本発明は、上記問題に対処するためになされたもので、2系統の回転角センサの一方の故障が検出された場合でも、残りの1系統の回転角センサを適正に監視しつつ、その回転角センサを使って適正な操舵アシストを継続できるようにすることを目的とする。
上記目的を達成するために、本発明の特徴は、
操舵ハンドルからステアリングシャフトに入力された操舵トルクを検出するトルク検出手段(21)と、
ステアリング機構に設けられて操舵アシストトルクを発生するモータ(20)と、
2系統の回転角センサ(31,32)を有し、前記2系統の回転角センサの少なくとも一方の出力信号を用いて、前記モータの回転角を検出する回転角検出手段(30)と、
前記トルク検出手段により検出された操舵トルクに基づいて目標操舵アシストトルクを発生させるためのモータ制御値を演算するモータ制御値演算手段(51)と、
前記回転角検出手段により検出された回転角と前記モータ制御値演算手段により演算された前記モータ制御値とに基づいて、前記モータを駆動制御するモータ制御手段(52,40)と
を備えた車両の電動パワーステアリング装置において、
前記2系統の回転角センサに対して故障が発生したか否かについて、すでに回転角センサの故障が1系統だけ検出されている状況であるのか、1系統も検出されていない状況であるのかに応じて互いに異なる故障判定方法を用いて判定するセンサ故障判定手段(70,S11,S12,S17,S21)を備え、
前記モータ制御手段は、前記回転角センサの故障が1系統だけ検出されている状況においては、故障が検出されていない残り1系統の回転角センサにより検出された回転角に基づいて前記モータの駆動制御を継続し、
前記センサ故障判定手段は、前記回転角センサの故障が1系統だけ検出されている状況で前記残り1系統の回転角センサに故障が発生したか否かについて判定する場合に限って、前記トルク検出手段によって検出された操舵トルクが、前記残り1系統の回転角センサが故障した場合に想定される特定の挙動を示したか否かに基づいて、前記故障発生の有無を判定する判定処理(S104〜S109)を含むように構成されたことにある。
操舵ハンドルからステアリングシャフトに入力された操舵トルクを検出するトルク検出手段(21)と、
ステアリング機構に設けられて操舵アシストトルクを発生するモータ(20)と、
2系統の回転角センサ(31,32)を有し、前記2系統の回転角センサの少なくとも一方の出力信号を用いて、前記モータの回転角を検出する回転角検出手段(30)と、
前記トルク検出手段により検出された操舵トルクに基づいて目標操舵アシストトルクを発生させるためのモータ制御値を演算するモータ制御値演算手段(51)と、
前記回転角検出手段により検出された回転角と前記モータ制御値演算手段により演算された前記モータ制御値とに基づいて、前記モータを駆動制御するモータ制御手段(52,40)と
を備えた車両の電動パワーステアリング装置において、
前記2系統の回転角センサに対して故障が発生したか否かについて、すでに回転角センサの故障が1系統だけ検出されている状況であるのか、1系統も検出されていない状況であるのかに応じて互いに異なる故障判定方法を用いて判定するセンサ故障判定手段(70,S11,S12,S17,S21)を備え、
前記モータ制御手段は、前記回転角センサの故障が1系統だけ検出されている状況においては、故障が検出されていない残り1系統の回転角センサにより検出された回転角に基づいて前記モータの駆動制御を継続し、
前記センサ故障判定手段は、前記回転角センサの故障が1系統だけ検出されている状況で前記残り1系統の回転角センサに故障が発生したか否かについて判定する場合に限って、前記トルク検出手段によって検出された操舵トルクが、前記残り1系統の回転角センサが故障した場合に想定される特定の挙動を示したか否かに基づいて、前記故障発生の有無を判定する判定処理(S104〜S109)を含むように構成されたことにある。
本発明においては、モータ制御値演算手段が、トルク検出手段によって検出された操舵トルクに基づいて目標操舵アシストトルクを発生させるためのモータ制御値を演算する。モータ制御手段は、回転角検出手段によって検出されたモータの回転角と、モータ制御値演算手段により演算されたモータ制御値とに基づいて、モータを駆動制御する。これにより、ステアリング機構に操舵操作に応じた操舵アシストトルクが付与され、ドライバーの操舵操作をアシストする。
回転角検出手段は、2系統の回転角センサを有し、この2系統の回転角センサの少なくとも一方の出力信号を用いて、モータの回転角を検出する。この場合、回転角検出手段は、モータのロータの回転角を検出できる構成であればよく、ロータの回転角を直接検出する構成に限らず、ロータの回転とともに回転する部材の回転角を検出する構成であってもよい。
本発明の車両の電動パワーステアリング装置は、センサ故障判定手段を備えている。センサ故障判定手段は、回転角センサに故障が発生したか否かについて、すでに回転角センサの故障が1系統だけ検出されている状況であるのか、1系統も検出されていない状況であるのかに応じて互いに異なる故障判定方法を用いて判定する。モータ制御手段は、センサ故障判定手段によって、回転角センサの故障が1系統だけ検出されている状況においては、残り1系統の回転角センサにより検出された回転角に基づいてモータの駆動制御を継続する。
モータ制御手段が、残り1系統の回転角センサにより検出された回転角に基づいてモータを駆動制御している場合、その回転角センサが故障した場合には、トルク検出手段によって検出された操舵トルクに特有の変化が生じる。そこで、センサ故障判定手段は、回転角センサの故障が1系統だけ検出されている状況で残り1系統の回転角センサに故障が発生したか否かについて判定する場合に限って、トルク検出手段によって検出された操舵トルクが、残り1系統の回転角センサが故障した場合に想定される特定の挙動を示したか否かに基づいて、故障発生の有無を判定する。
これにより、残り1系統の回転角センサに、その検出信号だけでは故障判定できないような故障が発生しても、操舵トルクが、残り1系統の回転角センサが故障した場合に想定される特定の挙動を示した場合には、モータ制御に用いられている回転角センサ(残り1系統の回転角センサ)に故障が発生したと判定することができる。
従って、本発明によれば、2系統の回転角センサの一方の故障が検出された場合でも、残りの1系統の回転角センサを適正に監視しつつ、その回転角センサを使って操舵アシストを継続することができる。また、残り1系統の回転角センサの故障を判定する場合に限って、操舵トルクの挙動に基づいて故障発生の有無を判定する判定処理を含むようにしているため、2系統の回転角センサが正常である状況での、故障誤判定の可能性を小さくすることができる。
本発明の一側面の特徴は、
前記特定の挙動は、前記操舵トルクが予め設定された故障判定値以上となる継続時間が設定時間以上となる挙動を含む(S104〜S107)ことにある。
前記特定の挙動は、前記操舵トルクが予め設定された故障判定値以上となる継続時間が設定時間以上となる挙動を含む(S104〜S107)ことにある。
例えば、残り1系統の回転角センサの検出信号が一定値に固着するという故障(信号固着故障)が発生した場合、検出されるモータ回転角が進まなくなるため、モータで発生するトルクが不足し、結果としてドライバーが操舵ハンドルに入力する力、つまり、トルク検出手段により検出される操舵トルクが急激に増加する。こうした故障時の特徴を捉えて、本発明の一側面においては、操舵トルクが予め設定された故障判定値以上となる継続時間が設定時間以上となる場合に、残り1系統の回転角センサが故障したと判定する。従って、信号固着故障が発生した場合には、適正に故障判定を行うことができる。
本発明の一側面の特徴は、
前記車両の速度である車速が遅い場合には、前記車速が速い場合に比べて前記故障判定値を大きくする車速応答故障判定値設定手段(S120)を備えたことにある。
前記車両の速度である車速が遅い場合には、前記車速が速い場合に比べて前記故障判定値を大きくする車速応答故障判定値設定手段(S120)を備えたことにある。
残りの1系統の回転角センサが故障していない場合に、操舵トルクが故障判定値以上になると1系統の回転角センサが故障していると誤判定する可能性が高くなる。その一方、据え切り操舵時、極低速走行中の操舵時においては、操舵トルクが増加しやすいので、操舵トルクが故障判定値以上になる可能性が高くなる。そこで、本発明の一側面では、車速応答故障判定値設定手段が、車速が遅い場合には、車速が速い場合に比べて故障判定値を大きくする。従って、本発明の一側面によれば、残り1系統の回転角センサの故障検出精度を維持しつつ、故障検出に係る誤判定(故障していないものを故障していると判定する誤り)を低減することができる。
本発明の一側面の特徴は、
前記モータ制御手段が前記モータの出力制限をする出力制限モードにて動作している場合には、前記出力制限モードにて動作していない場合に比べて前記故障判定値を大きくする出力制限応答故障判定値設定手段(S120)を備えたことにある。
前記モータ制御手段が前記モータの出力制限をする出力制限モードにて動作している場合には、前記出力制限モードにて動作していない場合に比べて前記故障判定値を大きくする出力制限応答故障判定値設定手段(S120)を備えたことにある。
一般に、電動パワーステアリング装置は、モータの過熱防止などのために、モータの出力を制限する機能を備えている。そうしたモータの出力を制限する出力制限モードにて動作している場合には、操舵アシストトルクが通常モード(出力制限モードにて動作していないモード)に比べて制限される。このため、ドライバーが操舵ハンドルに入力する力、つまり、トルク検出手段により検出される操舵トルクが増加しやすい。
そこで、本発明の一側面では、出力制限応答故障判定値設定手段が、モータの出力制限をする出力制限モードにて動作している場合には、出力制限モードにて動作していない場合に比べて故障判定値を大きくする。従って、本発明の一側面によれば、残り1系統の回転角センサの故障検出精度を維持しつつ、故障検出に係る誤判定を低減することができる。
本発明の一側面の特徴は、
前記操舵ハンドルが操舵限界位置から所定範囲内に位置する場合には、前記操舵ハンドルが前記操舵限界位置から所定範囲内に位置しない場合に比べて前記故障判定値を大きくする操舵位置応答故障判定値設定手段(S120)を備えたことにある。
前記操舵ハンドルが操舵限界位置から所定範囲内に位置する場合には、前記操舵ハンドルが前記操舵限界位置から所定範囲内に位置しない場合に比べて前記故障判定値を大きくする操舵位置応答故障判定値設定手段(S120)を備えたことにある。
例えば、操舵ハンドルを大きく操舵操作して操舵位置が操舵限界位置に到達した場合には、操舵ハンドルをそれ以上回すことができなくなり、操舵トルクが急激に増加する可能性がある。
そこで、本発明の一側面では、操舵位置応答故障判定値設定手段が、操舵ハンドルが操舵限界位置から所定範囲内に位置する場合には、操舵ハンドルが操舵限界位置から所定範囲内に位置しない場合に比べて故障判定値を大きくする。「操舵ハンドルが操舵限界位置から所定範囲内に位置する」とは、操舵ハンドルが操舵限界位置近傍に位置することを意味している。従って、本発明の一側面によれば、残り1系統の回転角センサの故障検出精度を維持しつつ、故障検出に係る誤判定を低減することができる。
本発明の一側面の特徴は、
前記センサ故障判定手段は、前記操舵トルクが予め設定された故障判定値以上となる継続時間が設定時間以上となる挙動が検出された場合、前記モータ制御手段が前記モータを駆動制御するために用いる回転角に所定回転角を加算し、前記所定回転角の加算後に、前記回転角検出手段によって検出される回転角の変化が生じない場合に、前記残り1系統の回転角センサが故障したことを確定する(S30,S31)ように構成されたことにある。
前記センサ故障判定手段は、前記操舵トルクが予め設定された故障判定値以上となる継続時間が設定時間以上となる挙動が検出された場合、前記モータ制御手段が前記モータを駆動制御するために用いる回転角に所定回転角を加算し、前記所定回転角の加算後に、前記回転角検出手段によって検出される回転角の変化が生じない場合に、前記残り1系統の回転角センサが故障したことを確定する(S30,S31)ように構成されたことにある。
本発明の一側面では、操舵トルクが予め設定された故障判定値以上となる継続時間が設定時間以上となる挙動が検出された場合、すぐに、残り1系統の回転角センサが故障したことを確定するのではなく、モータ制御手段がモータを駆動制御するために用いる回転角に所定回転角を加算し、所定回転角の加算後に、回転角検出手段によって検出される回転角の変化が生じない場合に、残り1系統の回転角センサが故障したことを確定する。モータ回転角に所定回転角が加算されると、モータ制御手段は、その加算量に対応した量だけモータの電気角を変化させる。従って、モータの出力する操舵アシストトルクが変化し、操舵ハンドルが回転する。例えば、所定回転角度は、操舵トルクの働いている方向に加算されることが好ましいが、その反対方向であってもよい。
このとき、残り1系統の回転角センサが故障していなければ、回転角検出手段によって検出される検出される回転角は変化するはずである。このことを利用して、センサ故障判定手段は、所定回転角の加算後に、回転角検出手段によって検出される回転角の変化が生じない場合に、残り1系統の回転角センサが故障したことを確定する。従って、本発明の一側面によれば、残り1系統の回転角センサの故障検出精度を維持しつつ、故障検出に係る誤判定を低減することができる。
本発明の一側面の特徴は、
前記センサ故障判定手段は、前記所定回転角の加算後に、前記回転角検出手段によって検出される回転角の変化が生じなく、かつ、前記モータで発生する誘起電圧の大きさが前記モータの回転状態を判定する設定電圧より大きい場合に、前記残り1系統の回転角センサが故障したことを確定する(S30,S31,S32)ように構成されたことにある。
前記センサ故障判定手段は、前記所定回転角の加算後に、前記回転角検出手段によって検出される回転角の変化が生じなく、かつ、前記モータで発生する誘起電圧の大きさが前記モータの回転状態を判定する設定電圧より大きい場合に、前記残り1系統の回転角センサが故障したことを確定する(S30,S31,S32)ように構成されたことにある。
例えば、操舵ハンドルを回転できない状況(操舵ハンドルが操舵限界位置に到達している状況、操舵輪が轍にはまっている状況など)においては、モータの回転角に所定回転角を加算しても、操舵ハンドルは回転できないので、回転角検出手段によって検出される回転角が変化しない可能性がある。一方、モータで発生する誘起電圧が大きい場合には、モータが回転していると推定できる。
このことを利用して、センサ故障判定手段は、所定回転角の加算後に、回転角検出手段によって検出される回転角の変化が生じなく、かつ、モータで発生する誘起電圧の大きさがモータの回転状態を判定する設定電圧より大きい場合に、残り1系統の回転角センサが故障したことを確定する。従って、本発明の一側面によれば、残り1系統の回転角センサの故障検出精度を維持しつつ、故障検出に係る誤判定を更に低減することができる。
本発明の一側面の特徴は、
前記モータ制御値演算手段は、前記センサ故障判定手段によって1系統の回転角センサの故障が検出されている場合には、2系統ともに回転角センサの故障が検出されていない場合に比べて、前記操舵トルクに対する前記目標操舵アシストトルクの大きさを大きくするように構成されたことにある。
前記モータ制御値演算手段は、前記センサ故障判定手段によって1系統の回転角センサの故障が検出されている場合には、2系統ともに回転角センサの故障が検出されていない場合に比べて、前記操舵トルクに対する前記目標操舵アシストトルクの大きさを大きくするように構成されたことにある。
残りの1系統の回転角センサが故障していない場合は、故障検出に係る誤判定を防止するために、できるだけ操舵トルクが故障判定値以上にならないようにする必要がある。そこで、モータ制御値演算手段は、1系統の回転角センサの故障が検出されている場合には、2系統ともに回転角センサの故障が検出されていない場合に比べて、操舵トルクに対する目標操舵アシストトルクの大きさを大きくする。これにより、1系統の回転角センサの故障が検出されている場合には、ハンドル操作が軽い設定になり(即ち、運転者がより小さい力で操舵ハンドルの操作が可能な状態となり)、操舵トルクが故障判定値以上になりにくいようにすることができる。従って、本発明の一側面によれば、残り1系統の回転角センサの故障検出精度を維持しつつ、故障検出に係る誤判定を低減することができる。尚、操舵トルクの全域において、操舵トルクに対する目標操舵アシストトルクの大きさを大きくする必要はなく、少なくとも操舵トルクの一部の範囲において、そのような関係が設定されていればよい。
本発明の一側面の特徴は、
前記2系統の回転角センサ(31,32)は、それぞれ、2つの磁気センサ(Ss1,Sc1,Ss2,Sc2)を備え、
前記2つの磁気センサは、それぞれ、電源回路から電圧が印加される直列に接続された2つの磁気抵抗効果素子(Ele1,Ele2)を備え、前記2つの磁気抵抗効果素子の接続点の電圧信号であって、前記モータの回転に伴って正弦波状に変化し、互いに位相がπ/2だけずれた振幅の等しい電圧信号を出力するように構成され、
前記特定の挙動は、前記操舵トルクが予め設定された周波数範囲で周期的に変化する挙動を含む(S108,S109)ことにある。
前記2系統の回転角センサ(31,32)は、それぞれ、2つの磁気センサ(Ss1,Sc1,Ss2,Sc2)を備え、
前記2つの磁気センサは、それぞれ、電源回路から電圧が印加される直列に接続された2つの磁気抵抗効果素子(Ele1,Ele2)を備え、前記2つの磁気抵抗効果素子の接続点の電圧信号であって、前記モータの回転に伴って正弦波状に変化し、互いに位相がπ/2だけずれた振幅の等しい電圧信号を出力するように構成され、
前記特定の挙動は、前記操舵トルクが予め設定された周波数範囲で周期的に変化する挙動を含む(S108,S109)ことにある。
本発明の一側面においては、2系統の回転角センサは、それぞれ、2つの磁気センサを備えている。この磁気センサは、それぞれ、電源回路から電圧が印加される直列に接続された2つの磁気抵抗効果素子を備え、2つの磁気抵抗効果素子の接続点の電圧信号であって、モータの回転に伴って正弦波状に変化し、互いに位相がπ/2だけずれた振幅の等しい電圧信号を出力する。これにより、一方の磁気センサの電圧信号から正弦波電圧信号が得られ、他方の電圧信号から余弦波電圧信号が得られる。従って、2つの信号の電圧値(直流成分の除いた電圧値)の逆正接を計算することにより、モータ回転角を求めることができる。
回転角センサにおいては、正弦波電圧成分の電圧値(正弦波電圧信号から直流成分の除いた電圧値)の二乗と、余弦波電圧成分の電圧値(余弦波電圧信号から直流成分の除いた電圧値)の二乗との和に応じた値(例えば、上記和の平方根)を演算し、その演算値が予め定まった所定値とならない場合には、故障していると判断することができる。
しかし、回転角センサ(2つの磁気センサ)の電源電圧が正常電圧よりも低い中間電圧に固着するという故障が発生して中間点の電位が変化した場合には、磁気センサの出力する電圧信号の原点がずれる。1系統の回転角センサが故障している状況においては、上記の演算値では、モータ回転角によっては、故障を検出できない範囲がある。つまり、正弦波電圧成分の電圧値の二乗と、余弦波電圧成分の電圧値の二乗との和に応じた値が、特定のモータ回転角の範囲において正常となる。このため、速い操舵操作が行われたときには、回転角センサの故障検出に至らないおそれがある。
一方、こうした電源故障が発生した場合には、操舵ハンドルが操作されているあいだ、操舵トルクが周期的に変動する。こうした故障時の特徴を捉えて、本発明の一側面においては、操舵トルクが予め設定された周波数範囲で周期的に変化する場合に、残り1系統の回転角センサが故障したと判定する。この予め設定された周波数範囲は、残り1系統の回転角センサの電源電圧が中間電圧に固着した場合に想定される操舵トルクの振動周波数の範囲に設定される。従って、上記の電源故障が発生した場合には、適正に故障判定を行うことができる。
上記説明においては、発明の理解を助けるために、実施形態に対応する発明の構成に対して、実施形態で用いた符号を括弧書きで添えているが、発明の各構成要件は、前記符号によって規定される実施形態に限定されるものではない。
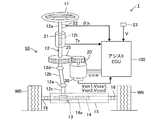
以下、本発明の実施形態に係る車両の電動パワーステアリング装置について図面を用いて説明する。図1は、同実施形態に係る車両の電動パワーステアリング装置1の概略構成を表している。
この電動パワーステアリング装置1は、操舵ハンドル11の操舵操作により転舵輪を転舵するステアリング機構10と、ステアリング機構10に組み付けられ操舵アシストトルクを発生するモータ20と、操舵ハンドル11の操作状態に応じてモータ20の作動を制御する電子制御ユニット100とを主要部として備えている。以下、電子制御ユニット100をアシストECU100と呼ぶ。
ステアリング機構10は、操舵ハンドル11の回動操作に連動したステアリングシャフト12の軸線周りの回転をラックアンドピニオン機構13によりラックバー14の左右方向のストローク運動に変換して、このラックバー14のストローク運動により左前輪Wflと右前輪Wfrとを転舵するようになっている。ステアリングシャフト12は、操舵ハンドル11を上端に連結したメインシャフト12aと、ラックアンドピニオン機構13と連結されるピニオンシャフト12cと、メインシャフト12aとピニオンシャフト12cとをユニバーサルジョイント12d,12eを介して連結するインターミディエイトシャフト12bとから構成される。
ラックバー14は、ギヤ部14aがラックハウジング15内に収納され、その左右両端がラックハウジング15から露出してタイロッド16と連結される。左右のタイロッド16の他端は、左右前輪Wfl,Wfrに設けられたナックル(図示略)に接続される。以下、左前輪Wflと右前輪Wfrとを単に転舵輪Wと呼ぶ。
ステアリングシャフト12(メインシャフト12a)には、トルクセンサ21と操舵角センサ22が設けられている。トルクセンサ21は、ステアリングシャフト12(メインシャフト12a)に介装されているトーションバー12tの捩れ角度を検出し、この捩れ角に基づいて、操舵ハンドル11からステアリングシャフト12に入力された操舵トルクTrを検出する。操舵角センサ22は、操舵ハンドル11の回転角度を操舵角θhとして検出する。
操舵トルクTrは、正負の値により操舵ハンドル11の操作方向が識別される。例えば、操舵ハンドル11の左方向への操舵時における操舵トルクTrは正の値で、操舵ハンドル11の右方向への操舵時における操舵トルクTrは負の値で示される。また、操舵角θhは、正負の値により中立位置に対する操舵方向が識別される。例えば、左方向の操舵角θは正の値で、右方向の操舵角θは負の値で示される。また、操舵トルクTrの大きさ、操舵角θの大きさは、その絶対値で示される。
ステアリングシャフト12(メインシャフト12a)には減速機25を介してモータ20が組み付けられている。モータ20は、例えば、三相ブラシレスモータが使用される。モータ20は、ロータの回転により減速機25を介してステアリングシャフト12をその中心軸周りに回転駆動して、操舵ハンドル11の回動操作に対してアシストトルクを付与する。
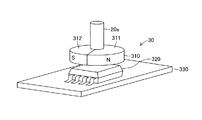
モータ20には、ロータ20aの回転角を検出する回転角センサユニット30が設けられる。回転角センサユニット30は、図2に示すように、モータ20のロータ20aの一方端に固定して取り付けられるマグネット部310と、マグネット部310に向かい合うように設けられるセンサ部320とを備えている。センサ部320は、モータ20のケーシング(図示略)との相対位置が変わらないように固定された基板330に設けられる。マグネット部310は、モータ20のロータ20aと同軸状に設けられる円盤形状の磁性部材であって、その半分の領域311(半月状の領域)がN極に着磁され、残り半分の領域312(半月状の領域)がS極に着磁されている。
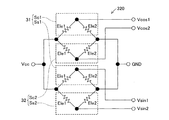
センサ部320は、マグネット部310の円盤状の平面に対して、モータ20のロータ20aの軸方向に所定のギャップをあけて設けられる。センサ部320には、図3に示すように、第1回転角センサ31と第2回転角センサ32とを備えている。第1回転角センサ31は、2つの磁気センサSs1,Sc1を備え、第2回転角センサ32は、2つの磁気センサSs2,Sc2を備える。
モータ20の回転角を検出するためには、第1回転角センサ31と第2回転角センサ32の何れか一方だけを備えていればよいが、一方が故障した場合のバックアップとして2つの回転角センサ31,32が設けられている。そのため、回転角センサユニット30は、2系統の回転角センサ31,32を備えていることになる。以下、2系統の回転角センサ31,32と呼ぶ場合は、第1回転角センサ31と第2回転角センサ32との両方を表し、1系統の回転角センサ31(32)と呼ぶ場合は、第1回転角センサ31と第2回転角センサ32との何れか一方を表す。
各磁気センサSs1,Sc1,Ss2,Sc2は、特定方向の磁界の強度に応じて電気抵抗値が変化する特性を有する2つの薄膜強磁性金属エレメント(磁気抵抗効果素子)Ele1,Ele2を備えている。各磁気センサSs1,Sc1,Ss2,Sc2においては、2つのエレメントEle1,Ele2が直列に接続され、その両端に電圧Vccが印加され(直列接続された一方のエレメントEle1の端と他方のエレメントEle2の端との間に電圧Vccが印加され)、2つのエレメントEle1,Ele2の接続点(中間点)における電位を表す電圧信号Vsin1,Vcos1,Vsin2,Vcos2を出力する。磁気抵抗効果素子を用いた磁気センサは、一般に、MRセンサと呼ばれているため、以下、磁気センサSs1,Sc1,Ss2,Sc2をMRセンサSs1,Sc1,Ss2,Sc2と呼ぶ。
このセンサ部320においては、2つの回転角センサ31,32に対して共通の電源回路を使用するように構成されており、各MRセンサSs1,Sc1,Ss2,Sc2の一方端が共通の電源端子に接続され、他方端が共通のグランド端子に接続されている。
2つのエレメントEle1,Ele2は、その配設される向きが互いに異なるように設けられている。つまり、エレメントEle1,Ele2に作用する磁界の方向に対して電気抵抗値の変化する特性が異なるように設けられている。このため、マグネット部310が回転して各エレメントEle1,Ele2に作用する磁界の向きが回転すると、それに同期してMRセンサSの出力信号の電圧が変動する。この電圧変動分は、モータ20の回転角度に応じた正弦波状に変化する。
センサ部320における4つのMRセンサSs1,Sc1,Ss2,Sc2は、モータ20の回転に伴って正弦波状に電圧が変動する周期信号を出力するが、この出力信号の電圧波形の位相が、π/2ずつずれるように配置して設けられる。
MRセンサSs1の出力電圧をVsin1、MRセンサSc1の出力電圧をVcos1、MRセンサSs2の出力電圧をVsin2、MRセンサSc2の出力電圧をVcos2とすると、出力電圧Vsin1,Vcos1,Vsin2,Vcos2は次式(1)〜(4)のように表される。
Vsin1=Vcc/2+Vt・sinθ ・・・(1)
Vcos1=Vcc/2+Vt・cosθ ・・・(2)
Vsin2=Vcc/2−Vt・sinθ ・・・(3)
Vcos2=Vcc/2−Vt・cosθ ・・・(4)
θは、予め設定したマグネット部310とセンサ部320との相対回転基準位置からマグネット部310が回転した角度を表す。Vtは、一定の電圧振幅を表す。
Vsin1=Vcc/2+Vt・sinθ ・・・(1)
Vcos1=Vcc/2+Vt・cosθ ・・・(2)
Vsin2=Vcc/2−Vt・sinθ ・・・(3)
Vcos2=Vcc/2−Vt・cosθ ・・・(4)
θは、予め設定したマグネット部310とセンサ部320との相対回転基準位置からマグネット部310が回転した角度を表す。Vtは、一定の電圧振幅を表す。
MRセンサSs1,Sc1,Ss2,Sc2の出力電圧Vsin1,Vcos1,Vsin2,Vcos2を、そこに含まれる直流分(Vcc/2)だけオフセットすることにより、互いに位相がπ/2だけずれた正弦波状(=余弦波状)の電圧信号が得られる。モータ回転角の計算にあたっては、出力電圧Vsin1,Vcos1,Vsin2,Vcos2から、直流分(Vcc/2=一定)をオフセットした電圧値、つまり、正弦波電圧信号の振幅の中心(Vcc/2)をゼロV(原点)とした電圧値が用いられる。従って、以下、モータ回転角の計算に用いられる出力電圧Vsin1,Vcos1,Vsin2,Vcos2については、次式(5)〜(8)のように置き換えればよい。
Vsin1=Vt・sinθ ・・・(5)
Vcos1=Vt・cosθ ・・・(6)
Vsin2=−Vt・sinθ ・・・(7)
Vcos2=−Vt・cosθ ・・・(8)
尚、MRセンサSs1,Sc1,Ss2,Sc2が、その出力信号がモータ20の1回転に対してN周期(N:自然数)で変動するように構成されているタイプである場合には、実際のモータ20のロータ20aの回転角は、モータ回転角θの1/Nとして計算すればよい。以下、MRセンサSs1,Sc1,Ss2,Sc2の出力信号におけるθをモータ回転角として説明する。
Vsin1=Vt・sinθ ・・・(5)
Vcos1=Vt・cosθ ・・・(6)
Vsin2=−Vt・sinθ ・・・(7)
Vcos2=−Vt・cosθ ・・・(8)
尚、MRセンサSs1,Sc1,Ss2,Sc2が、その出力信号がモータ20の1回転に対してN周期(N:自然数)で変動するように構成されているタイプである場合には、実際のモータ20のロータ20aの回転角は、モータ回転角θの1/Nとして計算すればよい。以下、MRセンサSs1,Sc1,Ss2,Sc2の出力信号におけるθをモータ回転角として説明する。
このように構成されたセンサ部320においては、第1回転角センサ31から、互いにπ/2位相のずれた出力電圧Vsin1,Vcos1をアシストECU100に出力し、第2回転角センサ32から、互いにπ/2位相のずれた出力電圧Vsin2,Vcos2をアシストECU100に出力する。以下、第1回転角センサ31の出力する電圧信号を検出信号Vsin1,Vcos1と呼び、第2回転角センサ32の出力する電圧信号を検出信号Vsin2,Vcos2と呼ぶ。アシストECU100は、この検出信号Vsin1,Vcos1,Vsin2,Vcos2を使って、モータ20の回転角θを計算し、この回転角θからモータ20の位相を制御するために必要な電気角を算出する。
次に、アシストECU100について説明する。アシストECU100は、上述したトルクセンサ21,操舵角センサ22、回転角センサユニット30に加えて、車速センサ23を接続している。車速センサ23は、車速Vを表す検出信号をアシストECU100に出力する。
アシストECU100は、図4に示すように、モータ20の目標制御量を計算し、計算された目標制御量に応じたスイッチ駆動信号を出力するアシスト演算部50と、アシスト演算部50から出力されたスイッチ駆動信号によってモータ20を駆動するモータ駆動回路40とを備えている。モータ駆動回路40は、例えば、インバータ回路で構成され、アシスト演算部50から出力されたスイッチ駆動信号(PWM制御信号)を入力して、内部のスイッチング素子のデューティ比を制御することによりモータ20への通電量を調整する。モータ駆動回路40には、モータ20の3相に流れるモータ電流Imを検出する電流センサ41,および、モータ20の3相端子の端子電圧Vmを検出する電圧センサ42が設けられる。
アシスト演算部50は、CPU,ROM,RAM等からなるマイクロコンピュータと、各種の入出力インタフェースと、モータ駆動回路40にスイッチ駆動信号を供給するスイッチ駆動回路等を備えている。
アシスト演算部50は、その機能に着目すると、モータ20の制御量である指令電流値を計算するモータ制御量演算部51と、指令電流値に対応した3相の電流がモータ20に流れるようにモータ駆動回路40の作動を制御する通電制御部52と、回転角センサユニット30から出力された検出信号Vsin1,Vcos1、Vsin2,Vcos2に基づいてモータ回転角θを計算するモータ回転角演算部60と、回転角センサユニット30の故障を検出する回転角センサ故障検出部70とを備えている。
モータ制御量演算部51は、トルクセンサ21により検出される操舵トルクTrを入力して、図5(a)に示す正常時アシストマップを参照して目標アシストトルクTa*を計算する。正常時アシストマップは、操舵トルクTrと目標アシストトルクTa*との関係を設定した関係付けデータであり、操舵トルクTrの大きさ(絶対値)が大きくなるほど大きくなる目標アシストトルクTa*を設定する特性を有する。尚、図5は、左方向の操舵アシスト特性を表しているが、右方向の操舵アシスト特性についても、トルクの発生方向が異なるだけで、大きさは、左方向の操舵アシスト特性と同じである。また、目標アシストトルクTa*の計算にあたっては、例えば、操舵トルクTrと車速Vとを組み合わせて、操舵トルクTrの大きさ(絶対値)が大きくなるほど大きくなり、かつ、車速Vが大きくなるほど小さくなる目標アシストトルクTa*を設定するなどしてもよい。
モータ制御量演算部51は、目標アシストトルクTa*を入力し、目標アシストトルクTa*をモータ20のトルク定数で除算することにより、目標アシストトルクTa*を発生させるために必要な目標電流であるアシスト指令電流I*を計算する。モータ制御量演算部51は、算出したアシスト指令電流I*を通電制御部52に供給する。
通電制御部52は、電流センサ41により検出されるモータ電流Im(実電流Imと呼ぶ)を読み込み、アシスト指令電流I*と実電流Imとの偏差を計算し、この偏差を使った比例積分制御により実電流Imがアシスト指令電流I*に追従するように目標電圧V*を計算する。そして、目標電圧V*に対応したPWM制御信号(スイッチ駆動信号)をモータ駆動回路(インバータ)40のスイッチング素子に出力する。これにより、モータ20が駆動され、目標アシストトルクTa*に追従した操舵アシストトルクがステアリング機構10に付与される。
この場合、通電制御部52は、モータ回転角演算部60から供給されたモータ回転角θを入力し、このモータ回転角θを電気角に変換して、その電気角に基づいてアシスト指令電流I*の位相角を制御する。例えば、通電制御部52は、モータ回転角θから換算される電気角に基づいて、モータ20の永久磁石の磁界が貫く方向となるd軸と、d軸に直交する方向(d軸からπ/2だけ電気角を進めた方向)となるq軸とを定めたd−q座標を用いた電流ベクトル制御によりモータ20を駆動制御する。
また、通電制御部52は、回転角センサ故障検出部70から回転角センサユニット30の故障の検出状況を表す故障検出信号Failを入力する。この故障検出信号Failは、回転角センサユニット30における系統毎の故障の有無、つまり、第1回転角センサ31と第2回転角センサ32との故障の有無について、故障している系統を特定して表す信号である。通電制御部52は、故障検出信号Failが、回転角センサユニット30の故障が検出されていない、あるいは、1系統の回転角センサのみ(第1回転角センサ31あるいは第2回転角センサ32)の故障が検出されていることを表している場合には、操舵アシスト制御を継続する。つまり、操舵トルクTrに応じた操舵アシストを実施する。一方、故障検出信号Failが、2系統の回転角センサ(第1回転角センサ31と第2回転角センサ32との両方)の故障が検出されていることを表している場合には、操舵アシストを停止する。
モータ回転角演算部60は、第1回転角センサ31、第2回転角センサ32の出力する検出信号(出力電圧Vsin1,Vcos1,Vsin2,Vcos2)を入力して、モータ回転角θを計算する。モータ回転角演算部60は、正常時回転角演算部61と、1系統故障時回転角演算部62と、回転角出力部63とを備えている。
モータ回転角演算部60においては、回転角センサ故障検出部70から出力される故障検出信号Failを入力し、故障検出信号Failが、2系統の回転角センサ31,32がともに正常(故障が検出されていない状態)であることを表す場合には、正常時回転角演算部61がモータ回転角θを計算する。また、故障検出信号Failが、1系統の回転角センサのみ(第1回転角センサ31あるいは第2回転角センサ32)の故障が検出されていることを表している場合には、1系統故障時回転角演算部62が、故障が検出されていない方の回転角センサ31(32)を使って、モータ回転角θを計算する。
正常時回転角演算部61は、第1回転角センサ31、第2回転角センサ32のどちらを使ってもモータ回転角θを計算することができる。例えば、第1回転角センサ31の出力電圧Vsin1,Vcos1を使って、モータ回転角θを次式のように計算することができる。
θ=tan-1(sinθ/cosθ)=tan-1(Vsin1/Vcos1) ・・・(9)
同様に、第2回転角センサ32の出力電圧Vsin2,Vcos2を使って、モータ回転角を次式のように計算することができる。
θ=tan-1(sinθ/cosθ)=tan-1(Vsin2/Vcos2) ・・・(10)
θ=tan-1(sinθ/cosθ)=tan-1(Vsin1/Vcos1) ・・・(9)
同様に、第2回転角センサ32の出力電圧Vsin2,Vcos2を使って、モータ回転角を次式のように計算することができる。
θ=tan-1(sinθ/cosθ)=tan-1(Vsin2/Vcos2) ・・・(10)
モータ回転角θの計算にあたっては、解が2つ求められるが、sinθとcosθとが正の値である場合にはθが第1象限(0°〜90°)になる角度を選択し、sinθが正の値でcosθが負の値である場合にはθが第2象限(90°〜180°)になる角度を選択し、sinθが負の値でcosθが負の値である場合にはθが第3象限(180°〜270°)になる角度を選択し、sinθが負の値でcosθが正の値である場合にはθが第4象限(270°〜360°)になる角度を選択する。以下、逆正接の計算に当たっては、これに準じる。
また、第1回転角センサ31、第2回転角センサ32の両方が正常である場合であれば、モータ回転角θの計算は、2つの回転角センサ31,32におけるそれぞれ一方の出力信号(位相が互いにπ/2ずれている出力信号)を使って計算することができる。例えば、MRセンサSs1の出力電圧Vsin1とMRセンサSc2の出力電圧Vcos2とを用いれば、次式(11)によりモータ回転角θを計算することができる。
θ=tan-1(sinθ/cosθ)=tan-1(Vsin1/−Vcos2)・・・(11)
また、MRセンサSc1の出力電圧Vcos1とMRセンサSs2の出力電圧Vsin2とを用いた場合には、次式(12)によりモータ回転角θを計算することができる。
θ=tan-1(sinθ/cosθ)=tan-1(−Vsin2/Vcos1)・・・(12)
尚、このように式(11)あるいは式(12)を用いてモータ回転角を計算する場合には、MRセンサSs1とMRセンサSc2とにより第1回転角センサ31(あるいは第2回転角センサ32)が構成され、MRセンサSs2とMRセンサSc1とにより第2回転角センサ32(あるいは第1回転角センサ31)が構成されていると考えればよい。
θ=tan-1(sinθ/cosθ)=tan-1(Vsin1/−Vcos2)・・・(11)
また、MRセンサSc1の出力電圧Vcos1とMRセンサSs2の出力電圧Vsin2とを用いた場合には、次式(12)によりモータ回転角θを計算することができる。
θ=tan-1(sinθ/cosθ)=tan-1(−Vsin2/Vcos1)・・・(12)
尚、このように式(11)あるいは式(12)を用いてモータ回転角を計算する場合には、MRセンサSs1とMRセンサSc2とにより第1回転角センサ31(あるいは第2回転角センサ32)が構成され、MRセンサSs2とMRセンサSc1とにより第2回転角センサ32(あるいは第1回転角センサ31)が構成されていると考えればよい。
また、第1回転角センサ31、第2回転角センサ32の出力する出力電圧Vsin1,Vcos1、Vsin2,Vcos2の全てを使ってモータ回転角θを計算することもできる。例えば、MRセンサSs1の出力電圧Vsin1とMRセンサSs2の出力電圧Vsin2との差(Vsin1−Vsin2)を表す電圧差Vs1-s2、および、MRセンサSc1の出力電圧Vcos1とMRセンサSc2の出力電圧Vcos2との差(Vcos1−Vcos2)を表す電圧差Vc1-c2は、次式(13),(14)のように表される。
Vs1-s2=Vt・sinθ−(−Vt・sinθ)=2Vt・sinθ・・・(13)
Vc1-c2=Vt・cosθ−(−Vt・cosθ)=2Vt・cosθ・・・(14)
従って、モータ回転角θは、次式(15)にて計算することもできる。
θ=tan-1(sinθ/cosθ)=tan-1(Vs1-s2/Vc1-c2)・・・(15)
Vs1-s2=Vt・sinθ−(−Vt・sinθ)=2Vt・sinθ・・・(13)
Vc1-c2=Vt・cosθ−(−Vt・cosθ)=2Vt・cosθ・・・(14)
従って、モータ回転角θは、次式(15)にて計算することもできる。
θ=tan-1(sinθ/cosθ)=tan-1(Vs1-s2/Vc1-c2)・・・(15)
正常時回転角演算部61は、このような計算式(9),(10),(11),(12)の1つを使って算出されたモータ回転角θ、あるいは、その計算式の複数を使って算出されたモータ回転角の平均値、あるいは、計算式(15)を使って算出されたモータ回転角を、計算結果として出力する。また、2系統の回転角センサ31,32のsin信号(Vsin1,Vsin2)同士、cos信号同士(Vcos1,Vcos2)の平均値を計算してから、その平均値を使ってモータ回転角θを計算するようにしてもよい。
1系統故障時回転角演算部62は、故障が検出されていない系統の回転角センサ(第1回転角センサ31、あるいは、第2回転角センサ32)の出力する出力電圧に基づいて、計算式(9),(10),(11),(12)の何れかを使ってモータ回転角θを計算する。例えば、第1回転角センサ31のMRセンサSc1の故障が検出されている場合には、MRセンサSc1およびMRセンサSs1の検出信号Vsin1,Vcos1を用いずに、第2回転角センサ32の検出信号Vsin2,Vcos2を用いてモータ回転角θを計算する。
回転角出力部63は、正常時回転角演算部61あるいは1系統故障時回転角演算部62によって計算されたモータ回転角θを通電制御部52に出力する。
回転角センサ故障検出部70は、1系統目故障検出部71と2系統目故障検出部72と故障信号出力部73とを備えている。1系統目故障検出部71は、2系統の回転角センサ(第1回転角センサ31と第2回転角センサ32)の両方に故障が検出されていない状況において作動し、2系統の回転角センサ31、32のうちの1つの系統の回転角センサ31(32)に故障が発生したか否かについて、故障が発生した系統の回転角センサ31(32)を特定して判定する。
一方、2系統目故障検出部72は、1系統目故障検出部71によって何れか1系統の回転角センサ31(32)の故障が検出されている状況において作動し、残り1系統の回転角センサ32(31)(故障が検出されていない回転角センサ)に故障が発生したか否かについて判定する。
故障信号出力部73は、回転角センサユニット30の故障状況を表す故障検出信号Failを通電制御部52とモータ回転角演算部60とに出力する。故障検出信号Failは、例えば、2系統の回転角センサ31,32がともに正常(故障が検出されていない状態)である場合には「0」にて表され、第1回転角センサ31の故障のみが検出されている場合には「1」にて表され、第2回転角センサ32の故障のみが検出されている場合には「2」にて表され、第1回転角センサ31と第2回転角センサ32との両方の故障が検出されている場合には「3」にて表される。
1系統目故障検出部71は、第1回転角センサ31の出力信号と、第2回転角センサ32の出力信号とを用いて、両者の乖離の有無に基づいて、2系統の回転角センサ31(32)のうちの一方に故障が発生したか否かについて判定する。例えば、1系統目故障検出部71は、第1回転角センサ31の出力電圧Vsin1,Vcos1から計算されるモータ回転角(第1演算モータ回転角θ1と呼ぶ)と、第2回転角センサ32の出力電圧Vsin2,Vcos2から計算されるモータ回転角(第2演算モータ回転角θ2と呼ぶ)との偏差|θ1−θ2|を計算し、この偏差|θ1−θ2|が故障判定基準値よりも大きい場合には、2系統の回転角センサ31、32のうちの1つの系統の回転角センサ31(32)に故障が発生したと判定する。
1系統目故障検出部71の行う故障判定については、演算された第1演算モータ回転角θ1と第2演算モータ回転角θ2との比較に限るものではない。例えば、上記手法に代えて、あるいは、加えて、第1回転角センサ31の出力電圧Vsin1と第2回転角センサ32の出力電圧Vsin2との絶対値の比較(正常であれば一致)、符号の比較(正常であれば正負逆)等を行って故障判定を行ってもよい。同様に、第1回転角センサ31の出力電圧Vcos1と第2回転角センサ32の出力電圧Vcos2との絶対値の比較(正常であれば一致)、符号の比較(正常であれば正負逆)等を行って故障判定を行ってもよい。このように、1系統目故障検出部71においては、2系統の回転角センサ31,32の4つの出力信号を故障判定に利用できるため、故障判定を正確、かつ、迅速に行うことができる。
1系統目故障検出部71は、上記比較演算と並行して、第1回転角センサ31の出力電圧Vsin1,Vcos1の二乗値の和の平方根を表す二乗平均和√(Vsin12+Vcos12)、および、第2回転角センサ32の出力電圧Vsin2,Vcos2の二乗値の和の平方根を表す二乗平均和√(Vsin22+Vcos22)を計算している。故障の発生していない回転角センサ31(32)であれば、この計算結果は、√(Vt2(sinθ2+cosθ2))=Vtとなり、予め設定された一定値となる。
第1演算モータ回転角θ1と第2演算モータ回転角θ2とが乖離している場合には、一方の回転角センサ31(32)の出力電圧の二乗平均和が異常値をとる。従って、1系統目故障検出部71は、計算した出力電圧の二乗平均和が許容範囲から外れている系統の回転角センサ31(32)を、故障の発生している回転角センサ31(32)として特定することができる。例えば、図6に示すように、二乗平均和の値をVxとすれば、二乗平均和Vxが許容範囲の下限値であるV1(=Vt−α)以上であって、許容範囲の上限値であるV2(=Vt+α)以下である場合(V1≦Vx≦V2)には、正常と判定し、それ以外の場合には、故障と判定すればよい。尚、平方根の計算は省略して、二乗和の計算により得られるVt2の大きさにより故障判定しても実質同じである。
2系統目故障検出部72は、1系統目故障検出部71によって故障が検出された系統とは異なる系統の回転角センサ31(32)の故障を検出する機能部である。上述したように、2系統の回転角センサ31,32がともに正常であれば、2系統の回転角センサ31,32の4つの出力信号を使って(比較して)、一方の回転角センサ31(32)に故障が発生したことを確実に判定できる。しかし、一方の回転角センサ31(32)の故障が検出された後においては、適正な比較対象が無くなるため、残り1つの回転角センサ31(32)に故障が発生したことを精度良く判定することは難しい。以下、その理由から説明する。
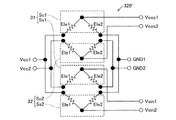
例えば、特許文献1に提案された回転角センサは、図7に示すように、2系統の回転角センサ31,32に対して、それぞれ独立した電源回路からMRセンサSs1,Sc1,Ss2,Sc2に電圧が印加されるように構成されている。この構成であれば、1系統の回転角センサ31(32)の故障が検出されている状況であっても、残りの1系統の回転角センサ32(31)において、2つのMRセンサSs2,Sc2(Ss1,Sc1)の出力電圧Vsin2,Vcos2(Vsin1,Vcos1)を比較すれば、故障を検出できる場合が多い。
しかし、本実施形態のように、電源端子、グランド端子を2つの回転角センサ31,32で共用している構成も一般的に採用されている。このように、2系統の回転角センサ31,32に対して電源回路を共用して備えた構成の場合、例えば、電源端子の電圧Vccが異常値(適正電圧よりも低い中間電圧値)に固着されてしまった場合(例えば、本来5Vであるはずの電源電圧Vccが3Vになっている等)など、残りの1系統の回転角センサ32(31)の有する2つのMRセンサSs2,Sc2(Ss1,Sc1)の出力信号が同時に影響を受けるような故障モードが発生する。この場合には、残り1つの回転角センサ32(31)において、2つのMRセンサSs2,Sc2(Ss1,Sc1)の出力電圧Vsin2,Vcos2(Vsin1,Vcos1)を比較しても、故障検出が困難になる場合がある、あるいは、時間がかかる場合がある。
また、例えば、残り1つの回転角センサ32(31)において、2つのMRセンサSs2,Sc2(Ss1,Sc1)の出力信号が間違った中間電圧(本来発生する電圧範囲内の任意の電圧)に固着されてしまうという故障が発生する場合がある。この場合には、二乗平均和√(Vsin12+Vcos12)も固着してしまう。こうしたケースにおいては、ハンドル操作が行われていないのか(保舵中も含む)、回転角センサ32(31)の故障であるのか判別することが難しい。つまり、2つのMRセンサSs2,Sc2(Ss1,Sc1)の出力信号が、ハンドル操作が行われていない場合と同様な値を示すため、2つのMRセンサSs2,Sc2(Ss1,Sc1)の出力電圧Vsin2,Vcos2(Vsin1,Vcos1)を比較しても、確実な故障判定を行うことは難しい。尚、2系統の回転角センサ31,32が両方とも正常である状態においては、その状態から4つのMRセンサSc1,Ss1,Sc2,Ss2の出力信号が同時に中間電圧に固着されてしまうということは実質的に考えられないので、2つのMRセンサSs2,Sc2(Ss1,Sc1)の出力信号の比較によって、一方の系統の回転角センサ32(31)の信号固着故障を検出することができる。
また、残り1つの回転角センサ32(31)において、2つのMRセンサSs2,Sc2(Ss1,Sc1)の1つが故障した場合であっても、出力電圧の二乗平均和を使った故障判定では、故障確定に時間がかかったり、最悪の場合には、故障検出できなかったりする場合がある。例えば、図8に示すように、2つのMRセンサSs2,Sc2の一方であるMRセンサSc2の出力電圧が急変して出力電圧の二乗平均和の値が異常値となった場合でも、故障を確定するために必要な一定時間経過する前に、図9に示すように、出力電圧が変化してしまうことがある。つまり、MRセンサSc2の出力電圧の符号のみが正常値に対して反転するという状態(反転故障と呼ぶ)となった場合には、出力電圧の二乗平均和の値が、√(Vt2(sinθ2+cosθ2))=Vt(正常値)となり、MRセンサSc2に故障が発生したことを確定することができない。
一般に、誤った故障検出を防ぐために、異常となる状態が一定時間継続することを確認してから、故障を確定するという手法が採られている。そのため、例えば、図8に示すように、一方のMRセンサSc2の出力電圧が急変して、出力電圧の二乗平均和の値が異常値となっても、一定時間経過する前に、図9に示すように、出力電圧の符号が反転した場合には、出力電圧の二乗平均和の値が正常値に戻ってしまう。こうした場合には、故障確定に時間がかかったり、最悪の場合には、故障検出できなかったりする。
例えば、2系統の回転角センサ31,32がともに正常である状況においては、2系統の回転角センサ31,32の4つの出力信号を使って(比較して)故障を判定できるため、故障を確定させるために必要な時間を短く設定することができる。つまり、2系統の回転角センサ31,32のうちの一方の出力電圧の二乗平均和の値が正常であれば、出力電圧の二乗平均和の値が急変した回転角センサに対しては、その急変を検出した早い段階で故障していると判定することができる。しかし、1系統の回転角センサ31(32)の故障が確定している状況においては、残り1系統の回転角センサ32(31)の故障を確定させるためには、誤検出のリスクを考えると、故障判定までにより長い時間をかける必要がある。そのため、故障確定させるための時間経過を待っている期間に、反転故障が発生した場合には、故障判定ができない。
このように、残り1系統の回転角センサ32(31)を使ってモータ回転角を検出する場合には、その回転角センサ32(31)の出力信号だけでは、故障を精度良く検出することができないおそれがある。また、出力電圧が急変した場合には、演算されるモータ回転角も急変する。このため、故障が発生してから故障が確定するまでの間に、操舵アシストを大きく誤らせてしまう可能性や、長時間誤った操舵アシストを行ってしまう可能性もある。
そこで、2系統目故障検出部72は、残り1系統の回転角センサ32(31)の出力信号の二乗平均和に基づく故障判定に加えて、操舵トルクTrの変動に基づいた故障判定を追加することにより、残り1系統の回転角センサ32(31)の故障を適正に検出する。
残り1系統の回転角センサ31(32)の出力信号を使って計算したモータ回転角θに基づいて操舵アシスト制御を行っている場合、残り1系統の回転角センサ31(32)が故障した場合には、操舵トルクTrに特有の変化が生じる。例えば、残り1系統の回転角センサ31(32)において、2つのMRセンサSc1,Ss1(Sc2,Ss2)の出力信号が同時に一定電圧に固着されてしまうという故障(信号固着故障と呼ぶ)が発生する場合が考えられる。その場合、図10(a)に示すように、故障が発生したタイミングで、計算されるモータ回転角θが一定となる。
このため、モータ20が回転しているにもかかわらず、一定のモータ回転角θが通電制御部52に供給される。従って、モータ20の電気角を回転方向に進めることができず、操舵アシストトルクが減少する。その結果として、ドライバーは、無意識に操舵アシストトルクの減少を補うように操舵ハンドル11を操作する。これにより、トルクセンサ21によって検出される操舵トルクTrは、図10(b)に示すように急増する。
操舵トルクTrは、回転角センサ31(32)が正常であってモータ20の通電制御を適正に行っているときには、予め想定される大きさの範囲内に収まるが、回転角センサ31(32)に信号固着故障が発生してモータ回転角θが一定値に固定されてしまうと、想定範囲を超える。従って、こうした操舵トルクTrの特定の挙動(増加)を検出することにより、回転角センサ31(32)の信号固着故障が発生したことを判定することができる。
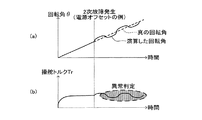
他の故障パターン例として、残り1つの回転角センサ31(32)において、電源電圧Vccが正常電圧よりも低い中間電圧に固着した故障(電源オフセット故障と呼ぶ)が発生する場合がある。その場合、図11(a)に示すように、回転角センサ31(32)の出力信号の電圧が変化する。この例では、電源電圧Vccが5Vから4Vに変化した例を表している。この場合、回転角センサ31(32)の出力信号は、振動の中点(原点)が2.5Vから2Vにずれ、振幅が2Vに変化する。これにより、計算される回転角(ここでは電気角で示している)は、図11(b)に示すように、誤差が発生する。
この誤差は、モータ20の回転に対して、電気角で360degを1周期として周期的に変動する。この場合、回転角センサ31(32)の出力電圧の二乗平均和Vxを計算すると、図11(c)に示すように、常に異常が検出されるというわけでなく、回転位置によっては異常が検出されない状況が発生する。この例では、図に破線で囲んだ領域においては、出力電圧の二乗平均和Vxが正常値から大きく外れるために、回転角センサの故障を確実に検出できるが、例えば、電気角で180deg、270deg近傍においては、故障を検出できない。従って、ドライバーが速いハンドル操作を行った場合には、出力電圧の二乗平均和を計算しても、故障検出をできないケースもある。
尚、2系統の回転角センサ31,32が正常である状態から電源オフセット故障が発生した場合には、それぞれの回転角センサ31,32の出力電圧の位相がπずれているため、それぞれの出力電圧の二乗平均和Vxが同時に正常値内に入ってしまう可能性は非常に小さい。従って、2系統の回転角センサ31,32が正常である状態から電源オフセット故障が発生した場合においては、迅速に故障検出できる。
操舵中において、回転角センサ31(32)に電源オフセット故障が発生すると、図12(a)に示すように、計算されたモータ回転角θが周期的に真値からずれる。このため、モータ20にトルクリップルが発生する。例えば、モータ20の極対数を7,減速機25のギヤ比を18.5,操舵速度を90deg/秒とすると、トルクリップルの周波数は、32Hz(=7×18.5×90/360)となる。このトルクリップルに同期して、ドライバーが操舵ハンドル11に入力する操舵トルクが周期的に変動する。このような回転角センサ31(32)の電源オフセット故障に起因する操舵トルクの変動は、その周期が短く、ドライバーが操舵操作によって意図的に発生させることもなく、かつ、発生させることができるものでもない。このため、ドライバーの意図的な操舵操作による操舵トルクの振動とは、容易に区別することができる。
従って、こうした操舵トルクTrの周期的な変動を検出することにより、回転角センサ31(32)の電源オフセット故障が発生したことを判定することができる。この場合、操舵トルクの変動の周期が、電源オフセット故障時に想定される設定周期範囲に入っている場合に、回転角センサ31(32)の故障が発生したと判定すればよい。
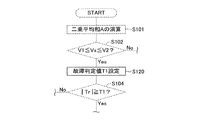
以下、2系統目故障検出部72における処理について説明する。図13は、2系統目故障検出部72の実施する2系統目故障判定ルーチンを表す。2系統目故障判定ルーチンは、所定の短い演算周期で繰り返し実施される。2系統目故障判定ルーチンは、後述する回転角故障対応制御ルーチン(図14)のステップS17として組み込まれたサブルーチンである。
2系統目故障判定ルーチンが起動すると、2系統目故障検出部72はステップS101において、残り1系統の回転角センサ31の検出信号Vsin1,Vcos1を読み込み、その出力電圧の二乗平均和Vx(=√(Vsin12+Vcos12)を計算する。ここでは、残り1系統の回転角センサ(1系統目故障検出部71によって故障が検出された系統とは異なる系統の回転角センサ)が第1回転角センサ31である場合を例として説明する。
続いて、2系統目故障検出部72はステップS102において、二乗平均和Vxが許容範囲の下限値であるV1(=Vt−α)以上であって、許容範囲の上限値であるV2(=Vt+α)以下であるか否か、つまり、二乗平均和Vxが許容範囲内であるか否かを判断する。ここでαは、検出誤差等を考慮した許容値(α>0)である。二乗平均和Vxが許容範囲に入っていない場合、2系統目故障検出部72は、ステップS103において、当該回転角センサ31について故障有りと判定して、本ルーチンを一旦終了する。
一方、ステップS102において「Yes」と判定された場合、つまり、二乗平均和による判定では故障を検知できなかった場合、2系統目故障検出部72は、その処理をステップS104に進める。ステップS104からの処理は、操舵トルクTrの変動に基づいて、残り1系統の回転角センサ31の故障の有無を判定する処理である。つまり、二乗平均和では、回転角センサ31の故障を検出できないケースがあるため、それを担保するための処理である。
2系統目故障検出部72は、ステップS104において、トルクセンサ21により検出される操舵トルクTrを読み込み、操舵トルクTrの大きさ|Tr|が予め設定された故障判定値T1以上であるか否かについて判断する。2系統目故障検出部72は、操舵トルク|Tr|が故障判定値T1以上である場合には、ステップS105において、タイマカウンタtimを値1だけインクリメントし、ステップS106において、タイマカウンタtimが設定値tim1以上に達したか否かを判断する。一方、操舵トルク|Tr|が故障判定値T1未満である場合には、2系統目故障検出部72は、ステップS107において、タイマカウンタtimの値をゼロクリアする。タイマカウンタtimの初期値はゼロに設定されている。これにより、タイマカウンタtimは、本ルーチンが繰り返されて、操舵トルク|Tr|が故障判定値T1以上であると判定されるたびにインクリメントされ、途中で操舵トルク|Tr|が故障判定値T1未満であると判定された場合にはゼロクリアされる。従って、このステップS104〜S107の処理は、操舵トルク|Tr|が故障判定値T1以上と判定されている継続時間が設定時間以上(設定値tim1に対応する時間)であるか否かについて判断する処理である。
2系統目故障検出部72は、操舵トルク|Tr|が故障判定値T1以上となっている継続時間が設定時間以上となったと判断した場合(S106:Yes)、その処理をステップS103に進めて、当該回転角センサ31について故障有りと判定する。回転角センサ31に信号固着故障が発生した場合には、上述したように、操舵トルクTrが急増する。従って、このステップS104〜S107の処理によって、信号固着故障を検出することができる。また、信号固着故障以外の原因、例えば、回転角センサ31の出力信号が反転する故障が発生したりして、二乗平均和では故障検出できなかった場合(S102:Yes)にも、操舵トルクTrが急増するため、回転角センサ31の故障を検出することができる。
一方、操舵トルク|Tr|が故障判定値T1以上となっている継続時間が設定時間未満であると判定された場合には、2系統目故障検出部72は、ステップS108において、操舵トルクTrの変動周波数fを演算する。例えば、2系統目故障検出部72は、操舵トルクTrをサンプリングして、直近の所定期間のサンプリング値から操舵トルクTrの周期的な変動成分を抽出し、その変動成分の変動周波数fを別途演算している。
続いて、2系統目故障検出部72は、ステップS109において、操舵トルクTrの変動周波数fが故障判定周波数範囲(f1〜f2)に入っているか否かについて判断する。操舵トルクTrは、電源オフセット故障が発生した場合には、特有の周波数(正常時には検出されない周波数)で振動する。2系統目故障検出部72は、電源オフセット故障に想定される操舵トルクTrの周波数範囲を故障判定周波数範囲(f1〜f2)として記憶しており、ステップS108で算出した操舵トルクTrの変動周波数fと、故障判定周波数範囲(f1〜f2)を比較する。
2系統目故障検出部72は、操舵トルクTrの変動周波数fが故障判定周波数範囲(f1〜f2)に入っている場合(f1≦f≦f2)には、その処理をステップS103に進めて、当該回転角センサ31について故障有りと判定する。一方、操舵トルクTrに周期的な変動が発生していない、あるいは、発生していても変動周波数fが故障判定周波数範囲(f1〜f2)に入っていない場合には、ステップS110において、当該回転角センサ31について故障無しと判定する。
2系統目故障検出部72は、こうした処理を繰り返すことにより、残り1系統の回転角センサ31(32)の故障を判定する。従って、二乗平均和では検出できなかった故障に対しても検出することができる。
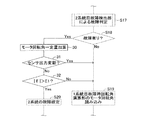
次に、回転角センサ31,32の故障に対する全体的な動作について説明する。図14は、回転角故障対応制御ルーチンを表す。本ルーチンは、主に、回転角センサ故障検出部70、モータ回転角演算部60、通電制御部52が協働して行う全体的な動作を示したものであるため、以下、アシスト演算部50の実施する処理として説明する。アシスト演算部50は、イグニッションスイッチがオンされている期間中、操舵アシスト制御と並行して回転角故障対応制御ルーチンを所定の短い周期で繰り返す。
本ルーチンが起動されると、アシスト演算部50は、ステップS11において、2系統の回転角センサ31,32の両方ともが正常であるか(故障が検出されていないか)否かについて判断する。2系統の回転角センサ31,32に故障が検出されていない場合(S11:Yes)は、アシスト演算部50は、ステップS12において、1系統目故障検出部71による回転角センサ31,32の故障判定を上述したように操舵トルクTrを用いることなく実施する。
一方、ステップS11において「No」と判定された場合には、アシスト演算部50は、ステップS21において、何れか一方の1系統の回転角センサ31(32)が正常であるか(故障が検出されていないか)否かについて判断する。1系統のみの回転角センサ31(32)に故障が検出されている場合には、アシスト演算部50は、ステップS17において、2系統目故障検出部72による回転角センサ31(32)の故障判定を実施する。このステップS17の処理は、上述した2系統目故障判定ルーチン(図13)と同一である。
また、ステップS21において「No」と判定された場合、つまり、2系統の回転角センサ31,32が何れも故障していると判定されている場合には、アシスト演算部50は、ステップS22において、操舵アシスト制御を停止する。
アシスト演算部50は、ステップS12において、1系統目故障検出部71による回転角センサ31,32の故障判定を実施した結果、故障有りと判定されなかった場合(S13:No)には、その処理をステップS14に進める。アシスト演算部50は、ステップS14において、正常時回転角演算部61により算出されたモータ回転角θを読み込み、ステップS15において、正常時回転角演算部61により算出されたモータ回転角θを使った操舵アシスト制御を継続する。
一方、1系統の回転角センサ31(32)に故障有りと判定された場合(S13:Yes)には、ステップS16において、故障有りと特定された回転角センサ31(32)について、故障確定する。つまり、故障有りと特定された回転角センサ31に係る故障確定情報を記憶する。この故障確定情報によって、以降、ステップS11,S21の判断が決定される。アシスト演算部50は、ステップS16において、1系統の回転角センサ31(32)の故障を確定した後、その処理をステップS17に進める。
アシスト演算部50は、ステップS17において、2系統目故障検出部72による回転角センサ31(32)の故障判定を実施した結果、故障有りと判定されなかった場合(S18:No)には、その処理をステップS19に進める。アシスト演算部50は、ステップS19において、1系統故障時回転角演算部62により算出されたモータ回転角θを読み込み、ステップS15において、1系統故障時回転角演算部62により算出されたモータ回転角θを使った操舵アシスト制御を継続する。従って2系統の回転角センサ31,32の一方の故障が検出されている状況であっても、残り1系統の回転角センサ31(32)の検出信号から算出されたモータ回転角θを使った操舵アシスト制御が継続される。
また、アシスト演算部50は、ステップS17において2系統目故障検出部72による回転角センサ31(32)の故障判定を実施した結果、故障有りと判定された場合(S18:Yes)、ステップS20において、故障有りと特定された回転角センサ31(32)について故障確定情報を記憶する。続いて、アシスト演算部50は、ステップS22において、操舵アシスト制御を停止する。
アシスト演算部50は、回転角故障対応制御ルーチンを所定の周期で繰り返す。従って、操舵アシスト制御中に、回転角センサ31,32の故障状況に応じた回転角センサ31,32の故障判定方法、および、モータ回転角θの計算に使用する回転角センサ31,32が選択され、2系統の回転角センサ31,32が両方とも故障するまで、回転角センサ31,32の検出信号を使った操舵アシスト制御を継続することができる。
以上説明した本実施形態の電動パワーステアリング装置1によれば、2系統目故障検出部72を設けて、1系統の回転角センサ31(32)が故障した場合には、それまでの故障判定方法を変更し、二乗平均和の値による判定に加えて、操舵トルクTrの特有な変動の有無に基づいた故障判定を追加している。これにより、二乗平均和では故障を検出できないケースであっても、故障を検出する可能性を高めることができる。
また、操舵トルクTrの変動は、回転角センサ31,32が故障した場合だけでなく他の要因にても発生する。そこで、2系統の回転角センサ31,32が両方とも故障が検出されていない状況においては、操舵トルクTrの変動に基づく故障判定を行わないようにし、残り1系統の回転角センサ31(32)により検出されるモータ回転角を使ったアシスト制御時においてのみ、操舵トルクTrの特有な変動に基づいた故障判定を追加している。従って、回転角センサ31,32の故障以外の要因による操舵トルクTrの変動に関しては、誤って回転角センサ31,32の故障であると誤判定しないように最大限配慮されている。
更に、電源オフセット故障、および、信号固着故障は、それぞれ特有の操舵トルクTrの挙動を生じるため、回転角センサ31,32の故障モードと操舵トルクTrの挙動とに強い相関がある。このため、電源オフセット故障時、および、信号固着故障時に特有に生じる操舵トルクの挙動に基づいて、故障判定閾値(故障判定値T1、故障判定周波数f1〜f2)を設定して、故障判定を行っているため、誤検出の可能性を小さくすることができる。つまり、操舵トルク|Tr|が故障判定値T1以上と判定されている継続時間が設定時間以上である、あるいは、操舵トルクTrの変動周波数fが故障判定周波数範囲(f1〜f2)に入っている場合に限って、故障有りと判定しているため、誤検出の可能性を小さくすることができる。つまり、他の要因で操舵トルクTrが変動した場合には、回転角センサ31,32の故障であると誤判定する可能性を小さくすることができる。
これらの結果、2系統の回転角センサ31,32を有効利用して、精度の良い操舵アシスト制御を継続させることができる。これにより、ドライバーは、長期にわたって良好な操舵アシストを得ることができる。
次に、いくつかの変形例について説明する。
<センサレス制御の適用>
上記実施形態においては、2系統の回転角センサ31,32の両方に故障が検出されている状況においては、ステップS22において、操舵アシストを停止するが、それに代えて、モータ20のセンサレス制御により操舵アシストを実施するようにしてもよい。モータ20のセンサレス制御は、モータ20の電気角を推定し、その推定した電気角に基づいてモータ20を駆動制御する公知の手法である。例えば、本願出願人は、センサレス制御にて電動パワーステアリング装置のモータを駆動する技術を特開2012−166776等に提案しており、こうした技術などを使用することができる。
<センサレス制御の適用>
上記実施形態においては、2系統の回転角センサ31,32の両方に故障が検出されている状況においては、ステップS22において、操舵アシストを停止するが、それに代えて、モータ20のセンサレス制御により操舵アシストを実施するようにしてもよい。モータ20のセンサレス制御は、モータ20の電気角を推定し、その推定した電気角に基づいてモータ20を駆動制御する公知の手法である。例えば、本願出願人は、センサレス制御にて電動パワーステアリング装置のモータを駆動する技術を特開2012−166776等に提案しており、こうした技術などを使用することができる。
この場合、アシスト演算部50は、図4に破線で示すように、センサレス電気角推定部80を備えている。センサレス電気角推定部80は、電流センサ41により検出されるモータ電流Imと、電圧センサ42により検出される端子電圧Vmとを読み込み、このモータ電流Imと端子電圧Vmとに基づいて、誘起電圧(逆起電力)を演算し、誘起電圧に比例するモータ角速度ωを算出する。そして、誘起電圧の演算周期と角速度とから、1演算周期あたりにモータ20が回転した回転角度を演算し、1演算周期前の電気角に、この回転角度を加減算することにより現時点の電気角、つまり、推定電気角θeを演算する。通電制御部52は、この推定電気角θeを使ってモータ20を駆動制御する。
電気角の推定は、回転角センサ31(32)を使って実際にモータ20の回転角を検出する場合に比べて検出精度が劣る。そこで、この変形例では、2系統の回転角センサ31,32を有効利用して、精度の良い操舵アシスト制御を継続させ、2系統の回転角センサ31,32の両方の故障が検出された時点で、ステップS22においてセンサレス制御に切り替えられる。従って、できるだけ操舵アシストを延命させることができ、ドライバーの負担を軽減することができる。
<故障判定閾値の変形例>
上記実施形態においては、2系統目故障検出部72が、ステップS104〜S107において、操舵トルク|Tr|が予め設定された故障判定値T1以上となっている継続期間が設定時間以上である場合に、回転角センサ31(32)が故障していると判定する。この場合、故障判定値T1が小さいと、実際には回転角センサ31(32)が故障していなくても故障していると誤判定しやすく、逆に、故障判定値T1が大きいと、回転角センサ31,32の故障検出精度が低下する。そこで、こうした点を改良する3つの変形例について説明する。3つの変形例は、図15に示すように、2系統目故障検出部72が、ステップS104の判断処理を行う前に、ステップS120において、故障判定値T1を状況に応じて設定する処理を追加したものである。
上記実施形態においては、2系統目故障検出部72が、ステップS104〜S107において、操舵トルク|Tr|が予め設定された故障判定値T1以上となっている継続期間が設定時間以上である場合に、回転角センサ31(32)が故障していると判定する。この場合、故障判定値T1が小さいと、実際には回転角センサ31(32)が故障していなくても故障していると誤判定しやすく、逆に、故障判定値T1が大きいと、回転角センサ31,32の故障検出精度が低下する。そこで、こうした点を改良する3つの変形例について説明する。3つの変形例は、図15に示すように、2系統目故障検出部72が、ステップS104の判断処理を行う前に、ステップS120において、故障判定値T1を状況に応じて設定する処理を追加したものである。
<故障判定閾値の変形例1>
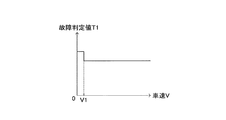
例えば、据え切り操舵時、極低速走行中の操舵時においては、軸力が大きく、ドライバーが操舵ハンドル11に入力する操作力が増加しやすい。そこで、この変形例1においては、2系統目故障検出部72が、ステップS120において、車速センサ23により検出される車速Vを読み込み、この車速Vに応じて故障判定値T1を設定する。例えば、2系統目故障検出部72は、図16の故障判定値設定マップに示すように、車速Vがゼロから設定速度V1(極低速速度)の範囲(低車速範囲と呼ぶ)に入る場合は、車速Vが低車速範囲に入らない場合に比べて大きな故障判定値T1を設定する。そして、2系統目故障検出部72は、ステップS104において、この故障判定値T1を使って操舵トルク|Tr|と比較する。
例えば、据え切り操舵時、極低速走行中の操舵時においては、軸力が大きく、ドライバーが操舵ハンドル11に入力する操作力が増加しやすい。そこで、この変形例1においては、2系統目故障検出部72が、ステップS120において、車速センサ23により検出される車速Vを読み込み、この車速Vに応じて故障判定値T1を設定する。例えば、2系統目故障検出部72は、図16の故障判定値設定マップに示すように、車速Vがゼロから設定速度V1(極低速速度)の範囲(低車速範囲と呼ぶ)に入る場合は、車速Vが低車速範囲に入らない場合に比べて大きな故障判定値T1を設定する。そして、2系統目故障検出部72は、ステップS104において、この故障判定値T1を使って操舵トルク|Tr|と比較する。
この故障判定値設定マップでは、故障判定値T1を2段階に変更しているが、車速Vが低い場合には高い場合に比べて、故障判定値T1が大きな値に設定されるものであればよく、複数段階、あるいは、連続的に変更するものであってもよい。この変形例1によれば、残り1系統の回転角センサ31の故障検出精度を維持しつつ、故障検出に係る誤判定を低減することができる。
<故障判定閾値の変形例2>
一般に、電動パワーステアリング装置は、モータの出力を制限する機能を備えている。例えば、モータの過熱するおそれがある場合には、モータの出力が制限される。本実施形態の電動パワーステアリング装置1においても、モータ20の出力制限機能を備えている。例えば、アシスト演算部50は、モータ20の温度を検出、あるいは、推定することによって、モータ20が過熱するおそれのある場合には、モータ20に流す電流の上限値を下げることによって、モータ20の過熱防止を図る。こうしたモータ20の出力制限が働いている状況、つまり、出力制限モードが設定されている状況においては、操舵アシストトルクが通常時(モータの出力制限が働いていない時)に比べて制限される。このため、ドライバーの操舵ハンドルに入力する操舵トルクが増加しやすい。
一般に、電動パワーステアリング装置は、モータの出力を制限する機能を備えている。例えば、モータの過熱するおそれがある場合には、モータの出力が制限される。本実施形態の電動パワーステアリング装置1においても、モータ20の出力制限機能を備えている。例えば、アシスト演算部50は、モータ20の温度を検出、あるいは、推定することによって、モータ20が過熱するおそれのある場合には、モータ20に流す電流の上限値を下げることによって、モータ20の過熱防止を図る。こうしたモータ20の出力制限が働いている状況、つまり、出力制限モードが設定されている状況においては、操舵アシストトルクが通常時(モータの出力制限が働いていない時)に比べて制限される。このため、ドライバーの操舵ハンドルに入力する操舵トルクが増加しやすい。
そこで、この変形例2においては、2系統目故障検出部72が、ステップS120において、モータ20の出力制限が働いている状況(出力制限モード)か否かを判断し、モータ20の出力制限が働いている状況であれば、出力制限が働いていない状況に比べて、大きな故障判定値T1を設定する。従って、この変形例2においても、残り1系統の回転角センサ31(32)の故障検出精度を維持しつつ、故障検出に係る誤判定を低減することができる。
<故障判定閾値の変形例3>
ステアリング機構10には、右方向および左方向の操舵操作の限界位置を設定するストッパが設けられている。この操舵操作の限界位置をストロークエンドと呼ぶ。操舵ハンドル11を大きく操舵操作して操舵位置がストロークエンドに到達した場合には、操舵ハンドル11をそれ以上回すことができなくなり、操舵トルクTrが急激に増加する可能性がある。
ステアリング機構10には、右方向および左方向の操舵操作の限界位置を設定するストッパが設けられている。この操舵操作の限界位置をストロークエンドと呼ぶ。操舵ハンドル11を大きく操舵操作して操舵位置がストロークエンドに到達した場合には、操舵ハンドル11をそれ以上回すことができなくなり、操舵トルクTrが急激に増加する可能性がある。
そこで、この変形例3においては、2系統目故障検出部72が、ステップS120において、操舵角センサ22により検出される操舵角θhを読み込み、この操舵角θhに基づいて故障判定値T1を設定する。例えば、2系統目故障検出部72は、操舵角θhが最大舵角近傍(操舵操作位置がストロークエンド近傍)であるか否かを判断し、操舵角θhが最大舵角近傍である場合には、最大舵角近傍でない場合に比べて大きな故障判定値T1を設定する。従って、この変形例3においても、残り1系統の回転角センサ31の故障検出精度を維持しつつ、故障検出に係る誤判定を低減することができる。尚、操舵角θhが最大舵角近傍であるか否かの判断は、例えば、操舵角θhが最大舵角θmaxから所定範囲γ内(θmax−γ≦|θh|≦θmax)に入っているか否かについて判断すればよい。
<故障確定に係る変形例1>
上述した実施形態においては、2系統目故障検出部72による回転角センサ31(32)の故障判定を実施した結果、故障有りと判定された時点(操舵トルク|Tr|が故障判定値T1以上と判定されている継続時間が設定時間以上であるか、あるいは、操舵トルクTrの変動周波数fが故障判定周波数範囲(f1〜f2)に入っていると判定された時点)で、故障が確定された(S20)。この変形例においては、故障を確定するに当たって、更に、以下の処理を追加している。
上述した実施形態においては、2系統目故障検出部72による回転角センサ31(32)の故障判定を実施した結果、故障有りと判定された時点(操舵トルク|Tr|が故障判定値T1以上と判定されている継続時間が設定時間以上であるか、あるいは、操舵トルクTrの変動周波数fが故障判定周波数範囲(f1〜f2)に入っていると判定された時点)で、故障が確定された(S20)。この変形例においては、故障を確定するに当たって、更に、以下の処理を追加している。
図17は、故障確定に係る変形例1に係る処理を表す。この変形例1は、実施形態の回転角故障対応制御ルーチンにステップS30,S31の処理を追加したものである。アシスト演算部50は、回転角故障対応制御ルーチンのステップS18において、2系統目故障検出部72によって故障有りと判定された場合、ステップS30において、操舵トルクTrの符号と同じ方向に、モータ回転角θに所定回転角だけ加算する。これにより、通電制御部52においては、その加算量に対応した量だけモータ20の電気角を進める。従って、モータ20の出力する操舵アシストトルクが変化し、それに応答してドライバーが操舵ハンドル11を回転させる。尚、所定回転角の加算は、操舵トルクTrの符号と同じ方向に限らず、反対方向であってもよい。
このとき、残り1系統の回転角センサ31(32)が故障していなければ、回転角センサ31(32)の出力する電圧信号は変化するはずである。そこで、アシスト演算部50は、ステップS31において、回転角センサ31(32)の出力する電圧信号を読み込み、電圧信号に変動があったか否かを判断する。アシスト演算部50は、電圧信号に変動が無い場合には、ステップS20において、残り1系統の回転角センサ31(32)についても故障を確定する。一方、電圧信号に変動があった場合には、アシスト演算部50は、残り1系統の回転角センサ31(32)の故障を確定することなく、その処理をステップS19に進める。
この故障確定に係る変形例1によれば、2系統目故障検出部72によって故障有りと判定されても直ちに故障を確定せずに、モータ20の電気角を進めてドライバーに操舵ハンドル11を回転操作させた後に、回転角センサ31(32)の故障の有無を再度判定する。従って、残り1系統の回転角センサ31(32)の故障検出精度を維持しつつ、故障検出に係る誤判定を低減することができる。
<故障確定に係る変形例2>
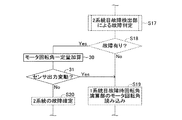
例えば、操舵ハンドル11を回転できない状況(操舵角がエンド位置に到達している状況、転舵輪Wが轍にはまっている状況など)においては、モータ回転角θに所定回転角だけ加算しても、回転角センサ31の出力する電圧信号は変化しない可能性がある。そこで、この故障確定に係る変形例2においては、図18に示すように、故障確定に係る変形例1に対して、ステップS32の判断処理が追加されている。
例えば、操舵ハンドル11を回転できない状況(操舵角がエンド位置に到達している状況、転舵輪Wが轍にはまっている状況など)においては、モータ回転角θに所定回転角だけ加算しても、回転角センサ31の出力する電圧信号は変化しない可能性がある。そこで、この故障確定に係る変形例2においては、図18に示すように、故障確定に係る変形例1に対して、ステップS32の判断処理が追加されている。
アシスト演算部50は、ステップS31において、残り1系統の回転角センサ31(32)の出力する電圧信号が変化しないと判定した場合、その処理をステップS32に進める。アシスト演算部50は、ステップS32において、電流センサ41により検出されるモータ電流Imと、電圧センサ42により検出される端子電圧Vmとを読み込み、このモータ電流Imと端子電圧Vmとに基づいて、モータ20で発生する誘起電圧(逆起電力)Eを演算する。そして、誘起電圧Eの大きさ|E|が車輪ロック判定閾値E1よりも大きいか否かについて判断する。
車輪ロック判定閾値E1は、転舵輪Wがロックしているか否かを判定するために予め設定された閾値である。誘起電圧|E|が車輪ロック判定閾値E1以下となる場合には、転舵輪Wがロックしていると推定できるため、アシスト演算部50は、「No」と判定して、その処理をステップS19に進める。従って、この場合には、残り1系統の回転角センサ31(32)の故障は確定されない。一方、誘起電圧|E|が車輪ロック判定閾値E1よりも大きい場合には、転舵輪Wがロックしていないと推定できるため、アシスト演算部50は、「Yes」と判定して、その処理をステップS20に進める。従って、この場合には、残り1系統の回転角センサ31についても故障が確定する。
この故障確定に係る変形例2によれば、変形例1の作用効果に加えて、操舵ハンドル11を回転できない状況における、回転角センサ31(32)の故障検出に係る誤判定を低減することができる。
<アシスト特性に係る変形例>
上記実施形態においては、2系統目故障検出部72が、ステップS104〜S107において、操舵トルク|Tr|が予め設定された故障判定値T1以上となっている継続期間が設定時間以上である場合に、回転角センサ31(32)が故障していると判定する。よって、残りの1系統の回転角センサ32(31)が故障していない場合は、できるだけ操舵トルク|Tr|が故障判定値T1以上にならないようにすることにより誤判定の可能性を低減できる。そこで、この変形例では、アシスト特性を、2系統の回転角センサ31,32がともに正常である場合(故障が検出されていない場合)と、1系統の回転角センサ31(32)に故障が検出されている場合とで切り替える。
上記実施形態においては、2系統目故障検出部72が、ステップS104〜S107において、操舵トルク|Tr|が予め設定された故障判定値T1以上となっている継続期間が設定時間以上である場合に、回転角センサ31(32)が故障していると判定する。よって、残りの1系統の回転角センサ32(31)が故障していない場合は、できるだけ操舵トルク|Tr|が故障判定値T1以上にならないようにすることにより誤判定の可能性を低減できる。そこで、この変形例では、アシスト特性を、2系統の回転角センサ31,32がともに正常である場合(故障が検出されていない場合)と、1系統の回転角センサ31(32)に故障が検出されている場合とで切り替える。
図5(a)は、正常時アシスト特性を示し、図5(b)は、1系統故障時アシスト特性を示す。モータ制御量演算部51は、回転角センサ故障検出部70から出力される故障検出信号Failを入力し、2系統の回転角センサ31,32の故障状況を判断する。モータ制御量演算部51は、2系統の回転角センサ31,32がともに正常である場合には、正常時アシスト特性を使って操舵トルクTrに応じた目標アシストトルクTa*を演算し、1系統の回転角センサ31(32)に故障が検出されている場合には、1系統故障時アシスト特性を使って操舵トルクTrに応じた目標アシストトルクTa*を演算する。
1系統故障時アシスト特性においては、正常時アシスト特性に比べて、操舵トルク|Tr|が所定値よりも大きい範囲において、操舵トルク|Tr|の増加に対する目標アシストトルクTa*の増加度合が大きくなっており、操舵トルク|Tr|に対する目標アシストトルクTa*が大きな値に設定される。このため、1系統故障時アシスト特性においては、正常時アシスト特性に比べて、小さな操舵トルク|Tr|で目標アシストトルクTa*が上限値に達する。従って、ハンドル操作が軽い設定になっている。
1系統故障時アシスト特性においては、回転角センサ31,32の故障判定に用いられる故障判定値T1は、目標アシストトルクTa*が上限値Ta*maxに到達するときの操舵トルクTmaxよりも大きな値に設定されている。このように設定することにより、ドライバーは、通常、目標アシストトルクTa*が上限値Ta*max以下となる範囲の操舵トルクにて操舵ハンドル11を操作する。従って、1系統故障時アシスト特性を用いて操舵アシスト制御が実施されている場合には、操舵トルク|Tr|は、故障判定値T1よりも小さくなる。
このアシスト特性に係る変形例によれば、残り1系統の回転角センサ31(32)の故障検出精度を維持しつつ、故障検出に係る誤判定を低減することができる。
以上、本実施形態および変形例にかかる車両の電動パワーステアリング装置1について説明したが、本発明は上記実施形態および変形例に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。
例えば、本実施形態においては、MRセンサの出力信号に基づいてモータ回転角θを検出する回転角検出手段を備えているが、回転角検出手段は、必ずしもMRセンサを備えている必要はなく、他のセンサを用いたものであってもよい。
また、実施形態に故障判定閾値の変形例1,2,3を適宜組み合わせて実施する構成であってもよい。つまり、車速条件、出力制限モード条件、操舵角条件を任意に組み合わせたOR条件を使って、故障判定値T1を設定する構成であってもよい。
また、故障確定に係る変形例1,2についても、実施形態に限らず、故障判定閾値の変形例1,2,3と適宜組み合わせることも可能である。また、アシスト特性に係る変形例についても、実施形態に限らず、故障判定閾値の変形例1,2,3、および、故障確定に係る変形例1,2と適宜組み合わせることも可能である。
また、本実施形態においては、回転角検出手段(回転角センサユニット30)は、モータ20のロータの回転角を直接検出するが、それに代えて、モータ20の回転と共に回転する部材、例えば、ピニオンシャフト12cあるいはインターミディエイトシャフト12bなどの部材の回転角を検出する構成であってもよい。
また、本実施形態においては、モータ20の発生するトルクをステアリングシャフト12に付与するコラムアシスト式の電動パワーステアリング装置について説明したが、モータの発生するトルクをラックバー14に付与するラックアシスト式の電動パワーステアリング装置であってもよい。
1…電動パワーステアリング装置、10…ステアリング機構、11…操舵ハンドル、20…モータ、21…トルクセンサ、22…操舵角センサ、23…車速センサ、30…回転角センサユニット、31,32…回転角センサ、40…モータ駆動回路、41…電流センサ、42…電圧センサ、50…アシスト演算部、51…モータ制御量演算部、52…通電制御部、60…モータ回転角演算部、61…正常時回転角演算部、62…1系統故障時回転角演算部、63…回転角出力部、70…回転角センサ故障検出部、71…1系統目故障検出部、72…2系統目故障検出部、73…故障信号出力部、80…センサレス電気角推定部、100…アシストECU、Ele1,Ele2…エレメント、f…変動周波数、Fail…故障検出信号、Ss1,Sc1,Ss2,Sc2…磁気センサ、T1…故障判定値、Tr…操舵トルク、Vsin1,Vcos1,Vsin2,Vcos2…検出信号(出力電圧)、Vx…二乗平均和、θ…モータ回転角、θh…操舵角。
Claims (9)
- 操舵ハンドルからステアリングシャフトに入力された操舵トルクを検出するトルク検出手段と、
ステアリング機構に設けられて操舵アシストトルクを発生するモータと、
2系統の回転角センサを有し、前記2系統の回転角センサの少なくとも一方の出力信号を用いて、前記モータの回転角を検出する回転角検出手段と、
前記トルク検出手段により検出された操舵トルクに基づいて目標操舵アシストトルクを発生させるためのモータ制御値を演算するモータ制御値演算手段と、
前記回転角検出手段により検出された回転角と前記モータ制御値演算手段により演算された前記モータ制御値とに基づいて、前記モータを駆動制御するモータ制御手段と
を備えた車両の電動パワーステアリング装置において、
前記2系統の回転角センサに対して故障が発生したか否かについて、すでに回転角センサの故障が1系統だけ検出されている状況であるのか、1系統も検出されていない状況であるのかに応じて互いに異なる故障判定方法を用いて判定するセンサ故障判定手段を備え、
前記モータ制御手段は、前記回転角センサの故障が1系統だけ検出されている状況においては、故障が検出されていない残り1系統の回転角センサにより検出された回転角に基づいて前記モータの駆動制御を継続し、
前記センサ故障判定手段は、前記回転角センサの故障が1系統だけ検出されている状況で前記残り1系統の回転角センサに故障が発生したか否かについて判定する場合に限って、前記トルク検出手段によって検出された操舵トルクが、前記残り1系統の回転角センサが故障した場合に想定される特定の挙動を示したか否かに基づいて、前記故障発生の有無を判定する判定処理を含むように構成された、車両の電動パワーステアリング装置。 - 請求項1記載の車両の電動パワーステアリング装置において、
前記特定の挙動は、前記操舵トルクが予め設定された故障判定値以上となる継続時間が設定時間以上となる挙動を含む、車両の電動パワーステアリング装置。 - 請求項2記載の車両の電動パワーステアリング装置において、
前記車両の速度である車速が遅い場合には、前記車速が速い場合に比べて前記故障判定値を大きくする車速応答故障判定値設定手段を備えた車両の電動パワーステアリング装置。 - 請求項2または請求項3記載の車両の電動パワーステアリング装置において、
前記モータ制御手段が前記モータの出力制限をする出力制限モードにて動作している場合には、前記出力制限モードにて動作していない場合に比べて前記故障判定値を大きくする出力制限応答故障判定値設定手段を備えた車両の電動パワーステアリング装置。 - 請求項2ないし請求項4の何れか一項記載の車両の電動パワーステアリング装置において、
前記操舵ハンドルが操舵限界位置から所定範囲内に位置する場合には、前記操舵ハンドルが前記操舵限界位置から所定範囲内に位置しない場合に比べて前記故障判定値を大きくする操舵位置応答故障判定値設定手段を備えた車両の電動パワーステアリング装置。 - 請求項2ないし請求項5の何れか一項記載の車両の電動パワーステアリング装置において、
前記センサ故障判定手段は、前記操舵トルクが予め設定された故障判定値以上となる継続時間が設定時間以上となる挙動が検出された場合、前記モータ制御手段が前記モータを駆動制御するために用いる回転角に所定回転角を加算し、前記所定回転角の加算後に、前記回転角検出手段によって検出される回転角の変化が生じない場合に、前記残り1系統の回転角センサが故障したことを確定するように構成された車両の電動パワーステアリング装置。 - 請求項6記載の車両の電動パワーステアリング装置において、
前記センサ故障判定手段は、前記所定回転角の加算後に、前記回転角検出手段によって検出される回転角の変化が生じなく、かつ、前記モータで発生する誘起電圧の大きさが前記モータの回転状態を判定する設定電圧より大きい場合に、前記残り1系統の回転角センサが故障したことを確定するように構成された車両の電動パワーステアリング装置。 - 請求項1ないし請求項7の何れか一項記載の車両の電動パワーステアリング装置において、
前記モータ制御値演算手段は、前記センサ故障判定手段によって1系統の回転角センサの故障が検出されている場合には、2系統ともに回転角センサの故障が検出されていない場合に比べて、前記操舵トルクに対する前記目標操舵アシストトルクの大きさを大きくするように構成された車両の電動パワーステアリング装置。 - 請求項1ないし請求項8の何れか一項記載の車両の電動パワーステアリング装置において、
前記2系統の回転角センサは、それぞれ、2つの磁気センサを備え、
前記2つの磁気センサは、それぞれ、電源回路から電圧が印加される直列に接続された2つの磁気抵抗効果素子を備え、前記2つの磁気抵抗効果素子の接続点の電圧信号であって、前記モータの回転に伴って正弦波状に変化し、互いに位相がπ/2だけずれた振幅の等しい電圧信号を出力するように構成され、
前記特定の挙動は、前記操舵トルクが予め設定された周波数範囲で周期的に変化する挙動を含む、車両の電動パワーステアリング装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014253575A JP6083428B2 (ja) | 2014-12-16 | 2014-12-16 | 車両の電動パワーステアリング装置 |
| US14/961,100 US9663140B2 (en) | 2014-12-16 | 2015-12-07 | Electric power steering system for vehicle |
| CN201510903674.7A CN105691444B (zh) | 2014-12-16 | 2015-12-09 | 用于车辆的电动转向系统 |
| DE102015121717.1A DE102015121717B4 (de) | 2014-12-16 | 2015-12-14 | Elektrisches Servolenksystem für ein Fahrzeug |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014253575A JP6083428B2 (ja) | 2014-12-16 | 2014-12-16 | 車両の電動パワーステアリング装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016113031A JP2016113031A (ja) | 2016-06-23 |
| JP6083428B2 true JP6083428B2 (ja) | 2017-02-22 |
Family
ID=56082636
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014253575A Active JP6083428B2 (ja) | 2014-12-16 | 2014-12-16 | 車両の電動パワーステアリング装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9663140B2 (ja) |
| JP (1) | JP6083428B2 (ja) |
| CN (1) | CN105691444B (ja) |
| DE (1) | DE102015121717B4 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6380014B2 (ja) * | 2014-11-04 | 2018-08-29 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP6083428B2 (ja) * | 2014-12-16 | 2017-02-22 | トヨタ自動車株式会社 | 車両の電動パワーステアリング装置 |
| DE102015116438B4 (de) | 2015-09-29 | 2023-03-30 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben eines Servolenksystems, Servolenksystem |
| DE102016103518A1 (de) * | 2016-02-29 | 2017-08-31 | Robert Bosch Automotive Steering Gmbh | Verfahren und Vorrichtung zur Rotorlagendiagnose in einem elektromotorischen Antrieb |
| GB2549328A (en) * | 2016-04-15 | 2017-10-18 | Jaguar Land Rover Ltd | Vehicle steering system |
| US11237021B2 (en) * | 2016-04-28 | 2022-02-01 | Mitsubishi Electric Corporation | Failure determination device for rotating machine control device and failure determination method |
| JP6319538B1 (ja) * | 2016-07-20 | 2018-05-09 | 日本精工株式会社 | 回転角度検出器及びトルクセンサ |
| KR101835406B1 (ko) * | 2016-08-26 | 2018-03-09 | 현대모비스 주식회사 | 전동식 파워 스티어링 시스템의 제어 장치 |
| JP6747367B2 (ja) * | 2017-04-18 | 2020-08-26 | 株式会社デンソー | 舵角検出装置、および、これを用いた電動パワーステアリング装置 |
| KR101950259B1 (ko) * | 2017-05-22 | 2019-02-22 | 주식회사 만도 | 전동식 조향장치의 조향정보 검출 장치 및 조향정보 검출방법 |
| JP6228341B1 (ja) * | 2017-05-26 | 2017-11-08 | 株式会社ショーワ | 故障検出装置、電動パワーステアリング装置 |
| DE102017116764A1 (de) * | 2017-07-25 | 2019-01-31 | Danfoss Power Solutions Aps | Lenkhandrad-Winkelsensor und Verfahren zur Fehlererfassunq eines Lenkhandrad-Winkelsensors |
| DE102017215842A1 (de) * | 2017-09-08 | 2019-03-14 | Robert Bosch Gmbh | Verfahren zum Betrieb einer Lenkvorrichtung und Lenkvorrichtung |
| KR101901127B1 (ko) | 2017-09-29 | 2018-09-27 | 주식회사 만도 | 모터 고장 판단 장치 및 방법 |
| KR102024550B1 (ko) * | 2017-10-16 | 2019-09-24 | 주식회사 만도 | 전동식 동력 조향 시스템의 페일 세이프 제어장치 및 제어방법 |
| JP6911714B2 (ja) * | 2017-11-07 | 2021-07-28 | 株式会社ジェイテクト | 操舵制御装置 |
| JP6922669B2 (ja) * | 2017-11-07 | 2021-08-18 | 株式会社ジェイテクト | 操舵制御装置 |
| JP6965697B2 (ja) | 2017-11-09 | 2021-11-10 | 株式会社ジェイテクト | 操舵制御装置 |
| US11529990B2 (en) | 2018-03-20 | 2022-12-20 | Denso Corporation | Signal control apparatus and electric power steering apparatus using same |
| JP7106989B2 (ja) * | 2018-03-20 | 2022-07-27 | 株式会社デンソー | 信号制御装置、および、これを用いた電動パワーステアリング装置 |
| CN108945091B (zh) * | 2018-07-26 | 2020-03-24 | 北京新能源汽车股份有限公司 | 转向控制方法、装置、电动助力转向系统控制器及汽车 |
| US11654958B2 (en) | 2018-10-12 | 2023-05-23 | Robert Bosch Gmbh | Detecting impact forces on an electric power steering system |
| CN109552403A (zh) * | 2018-11-28 | 2019-04-02 | 安徽德孚转向系统股份有限公司 | 电动助力转向系统的传感器故障检测方法 |
| JP6811820B1 (ja) * | 2019-09-27 | 2021-01-13 | 三菱電機株式会社 | モータ制御装置 |
| CN111293928A (zh) * | 2020-01-23 | 2020-06-16 | 中国公路车辆机械有限公司 | 基于tmr元件的eps电机位置检测系统及方法 |
| US11708105B2 (en) | 2020-02-11 | 2023-07-25 | Robert Bosch Gmbh | Detecting damage to components of an electric power steering system |
| US11608109B2 (en) | 2020-08-12 | 2023-03-21 | Analog Devices International Unlimited Company | Systems and methods for detecting magnetic turn counter errors with redundancy |
| US11493362B2 (en) | 2020-08-12 | 2022-11-08 | Analog Devices International Unlimited Company | Systems and methods for detecting magnetic turn counter errors |
| US11919580B2 (en) * | 2021-12-09 | 2024-03-05 | Ford Global Technologies, Llc | Methods and apparatus to move a steering wheel |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4474872B2 (ja) | 2003-09-02 | 2010-06-09 | パナソニック株式会社 | 絶対回転角およびトルク検出装置 |
| JP4334953B2 (ja) * | 2003-09-16 | 2009-09-30 | 株式会社日立製作所 | パワーステアリング装置 |
| FR2899862B1 (fr) * | 2006-04-13 | 2009-06-05 | Siemens Vdo Automotive Sas | Procede et dispositif de mesure de la position angulaire, entre deux butees de braquage,d'un volant de direction d'un vehicule |
| US9102355B2 (en) * | 2009-06-29 | 2015-08-11 | Volvo Lastvagnar Ab | Method and a system for assisting a driver of a vehicle during operation |
| JP5257374B2 (ja) * | 2010-02-02 | 2013-08-07 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| US8656791B2 (en) * | 2010-08-25 | 2014-02-25 | Toyota Jidosha Kabushiki Kaisha | Torque detection apparatus |
| JP5375796B2 (ja) | 2010-11-05 | 2013-12-25 | 株式会社デンソー | 回転角検出装置、および、これを用いた電動パワーステアリング装置 |
| JP5672191B2 (ja) | 2011-01-26 | 2015-02-18 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| JP2013088154A (ja) | 2011-10-14 | 2013-05-13 | Panasonic Corp | 回転角度検出装置及びこれを用いた回転角度検出システム |
| JP5679136B2 (ja) | 2011-11-24 | 2015-03-04 | トヨタ自動車株式会社 | 回転角検出装置、および、回転角検出装置を備えた電動パワーステアリング装置 |
| JP5274702B1 (ja) | 2012-06-28 | 2013-08-28 | 株式会社一宮電機 | モータ駆動システム |
| JP6056482B2 (ja) * | 2013-01-08 | 2017-01-11 | 株式会社ジェイテクト | 回転角センサの異常検出装置 |
| JP2014208503A (ja) * | 2013-04-16 | 2014-11-06 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP2014213719A (ja) * | 2013-04-25 | 2014-11-17 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| EP3035523B1 (en) * | 2013-08-12 | 2018-04-25 | NSK Ltd. | Motor control device, electric power steering device using same, and vehicle |
| WO2015087553A1 (ja) * | 2013-12-13 | 2015-06-18 | 日本精工株式会社 | 電子制御ユニット、電動パワーステアリング装置及び車両 |
| EP3110002B1 (en) * | 2014-02-19 | 2021-06-16 | Mitsubishi Electric Corporation | Motor rotation angle detection apparatus and electric power steering apparatus using same |
| EP3113355B1 (en) * | 2014-02-28 | 2019-05-22 | NSK Ltd. | Motor control device and electric power-steering device and vehicle using said motor control device |
| WO2015145962A1 (ja) * | 2014-03-25 | 2015-10-01 | 日本精工株式会社 | 電動パワーステアリング装置 |
| JP6237565B2 (ja) * | 2014-10-17 | 2017-11-29 | 株式会社デンソー | 回転電機制御装置、および、これを用いた電動パワーステアリング装置 |
| JP6222063B2 (ja) * | 2014-12-03 | 2017-11-01 | 株式会社デンソー | 制御装置 |
| JP6083428B2 (ja) * | 2014-12-16 | 2017-02-22 | トヨタ自動車株式会社 | 車両の電動パワーステアリング装置 |
-
2014
- 2014-12-16 JP JP2014253575A patent/JP6083428B2/ja active Active
-
2015
- 2015-12-07 US US14/961,100 patent/US9663140B2/en active Active
- 2015-12-09 CN CN201510903674.7A patent/CN105691444B/zh not_active Expired - Fee Related
- 2015-12-14 DE DE102015121717.1A patent/DE102015121717B4/de not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US9663140B2 (en) | 2017-05-30 |
| US20160167701A1 (en) | 2016-06-16 |
| CN105691444B (zh) | 2018-01-23 |
| DE102015121717B4 (de) | 2018-08-30 |
| CN105691444A (zh) | 2016-06-22 |
| DE102015121717A1 (de) | 2016-06-16 |
| JP2016113031A (ja) | 2016-06-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6083428B2 (ja) | 車両の電動パワーステアリング装置 | |
| JP6657584B2 (ja) | 回転検出装置、回転角検出装置および電動パワーステアリング装置 | |
| EP3045871B1 (en) | Rotational-angle detection device and electric power-steering device provided with rotational-angle detection device | |
| JP4378151B2 (ja) | モータ駆動装置 | |
| EP2518894B1 (en) | Motor control unit and vehicle steering system | |
| US10340827B2 (en) | Fault tolerant current measurement in motor control systems | |
| US9873451B2 (en) | Motor circuit for electric power assisted steering and method | |
| JP6556343B2 (ja) | 角度検出装置および電動パワーステアリングの制御装置 | |
| JP2014134390A (ja) | 回転角センサの異常検出装置 | |
| JP5720963B2 (ja) | モータ制御装置 | |
| JP6769247B2 (ja) | 回転電機システム | |
| CN107820671B (zh) | 电动助力转向装置的控制装置以及电动助力转向装置 | |
| CN108290605B (zh) | 电动助力转向装置 | |
| US8767364B2 (en) | Vehicle steering system | |
| CN111200384B (zh) | 电流感测故障下永磁同步马达驱动的前馈控制方法及系统 | |
| JP3915595B2 (ja) | レゾルバを用いた回転角度検出装置およびこの装置を用いた制御装置 | |
| WO2019054089A1 (ja) | モータ駆動装置、モータ、および電動パワーステアリング装置 | |
| JP5327503B2 (ja) | モータ制御装置 | |
| JP6655159B2 (ja) | 三相同期電動機の制御装置および制御方法、駆動装置並びに電動パワーステアリング装置 | |
| WO2019054091A1 (ja) | モータ駆動装置、モータ、電動パワーステアリング装置、モータ駆動方法、および記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161227 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170109 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6083428 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |