JP5557336B2 - 微小電気機械システム(mems)センサを備える装置およびそのセンサの製造方法 - Google Patents
微小電気機械システム(mems)センサを備える装置およびそのセンサの製造方法 Download PDFInfo
- Publication number
- JP5557336B2 JP5557336B2 JP2010520025A JP2010520025A JP5557336B2 JP 5557336 B2 JP5557336 B2 JP 5557336B2 JP 2010520025 A JP2010520025 A JP 2010520025A JP 2010520025 A JP2010520025 A JP 2010520025A JP 5557336 B2 JP5557336 B2 JP 5557336B2
- Authority
- JP
- Japan
- Prior art keywords
- section
- aperture
- electrode
- configuration
- sensing element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0822—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass
- G01P2015/0825—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass for one single degree of freedom of movement of the mass
- G01P2015/0831—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass for one single degree of freedom of movement of the mass the mass being of the paddle type having the pivot axis between the longitudinal ends of the mass, e.g. see-saw configuration
Description
Claims (4)
- 微小電気機械システム(MEMS)センサを備える装置であって、
前記センサは、
基板と、
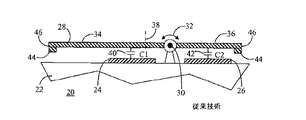
前記基板に取り付けられた可動検知要素であって、前記可動検知要素は、前記可動検知要素の第1および第2の端部間の実質的に幾何学的中心の回転軸に対する動きに対して適合されるとともに、前記回転軸と前記第1の端部との間の第1の区分と、前記回転軸と前記第2の端部との間の第2の区分とを形成し、前記第1の区分は第1の形状を有し、前記第2の区分は、前記可動検知要素が前記回転軸に関して幾何学的に対称となるように前記第1の区分とほぼ同一の第2の形状を有し、前記第1の区分は、第1の質量を有する前記第1の区分を形成するように前記可動検知要素を通って延びる第1のアパーチャを備え、前記第2の区分は、前記第1の質量より小さい第2の質量を有する前記第2の区分を形成するように前記可動検知要素を通って延びる第2のアパーチャを備える、前記可動検知要素と、
前記基板上に位置し前記可動検知要素の前記第1および第2の区分に対向する少なくとも一つの電極とを備え、
前記第1のアパーチャは前記第1の区分において第1の構成で配置され、
前記第2のアパーチャは前記第2の区分において第2の構成で配置され、前記第2の構成は前記第1の構成とは異なり、前記第1および第2の構成の各々は、前記第1のアパーチャおよび前記第2のアパーチャの対応するもののサイズおよび数量を表現し、
前記少なくとも一つの電極は、
前記第1の区分に対向する第1の電極であって、前記第2の構成で配置され、前記第1のアパーチャに対向する第3のアパーチャを有する第1の電極と、
前記第2の区分に対向する第2の電極であって、前記第1の構成で配置され、前記第2のアパーチャに対向する第4のアパーチャを有する前記第2の電極と、を備える、装置。 - 微小電気機械システム(MEMS)センサを備える装置であって、
前記センサは、
基板と、
前記基板に取り付けられた可動検知要素であって、前記可動検知要素は、前記可動検知要素の第1および第2の端部間の実質的に幾何学的中心の回転軸に対する動きに対して適合されるとともに、前記回転軸と前記第1の端部との間の第1の区分と、前記回転軸と前記第2の端部との間の第2の区分とを形成し、前記第1の区分は第1の形状を有し、前記第2の区分は、前記可動検知要素が前記回転軸に関して幾何学的に対称となるように前記第1の区分とほぼ同一の第2の形状を有し、前記第1の区分は、第1の質量を有する前記第1の区分を形成するように前記可動検知要素を通って延びる第1のアパーチャを備え、前記第2の区分は、前記第1の質量より小さい第2の質量を有する前記第2の区分を形成するように前記可動検知要素を通って延びる第2のアパーチャを備える、前記可動検知要素と、
前記基板上に位置し前記可動検知要素の前記第1および第2の区分に対向する少なくとも一つの電極とを備え、
前記第1のアパーチャは前記第1の区分において第1の構成で配置され、
前記第2のアパーチャは前記第2の区分において第2の構成で配置され、前記第2の構成は前記第1の構成とは異なり、前記第1および第2の構成の各々は、前記第1のアパーチャおよび前記第2のアパーチャの対応するもののサイズおよび数量を表現し、
前記センサは、前記第1の区分を通って延びる第3のアパーチャと、
前記第2の区分を通って延びる第4のアパーチャと、をさらに備え、
前記第3および第4のアパーチャの各々は、前記第3および第4のアパーチャの数量及びサイズを規定する共通の構成で配置され、前記第3および第4のアパーチャは、前記可動検知要素上に前記回転軸に対して実質的に対称的に配置される、装置。 - 前記第1の区分は、前記回転軸に隣接して配置される第1の近位領域と前記第1の端部に隣接して配置される第1の遠位領域とを備え、
前記第2の区分は、前記回転軸に隣接して配置される第2の近位領域と前記第2の端部に隣接して配置される第2の遠位領域とを備え、
前記第3のアパーチャは前記第1の近位領域に位置し、前記第4のアパーチャは前記第2の近位領域に位置する、請求項2に記載の装置。 - 微小電気機械システム(MEMS)センサを製造する方法であって、
基板を用意する工程と、
前記基板上に静的伝導層を第1の電極および第2の電極を備えるように形成する工程であって、前記第1の電極は前記第2の電極から電気的に絶縁されている、工程と、
前記伝導層上に犠牲層を形成する工程と、
前記犠牲層上に可動要素を形成する工程であって、前記可動要素は、前記可動要素の第1および第2の端部間の幾何学的中心である回転軸に対する動きに対して適合されるとともに、前記回転軸と前記第1の端部との間の第1の区分と、前記回転軸と前記第2の端部との間の第2の区分とを形成する、工程と、
前記可動要素の前記第1の区分を通って延びる第1のアパーチャを形成して、第1の質量を有する前記第1の区分を形成する工程と、
前記可動要素の前記第2の区分を通って延びる第2のアパーチャを形成して、前記第1の質量よりも小さい第2の質量を有する前記第2の区分を形成する工程と、
前記伝導層が前記可動要素から離れて配置されるように前記犠牲層を選択的に取り除き、前記第1の電極が前記第1のアパーチャに面して第2の電極が前記第2のアパーチャに対向するように前記伝導層を形成する工程と、
前記第1のアパーチャを前記第1の区分の第1の遠位領域に渡って第1の構成で配置されるように形成する工程であって、前記第1の遠位領域は前記第1の端部に隣接して配置される、工程と、
前記第2のアパーチャを前記第2の区分の第2の遠位領域に渡って第2の構成で配置されるように形成する工程であって、前記第2の遠位領域は前記第2の端部に隣接して配置され、前記第2の構成は前記第1の構成とは異なり、前記第1および第2の構成はそれぞれ、前記第1のアパーチャおよび前記第2のアパーチャの対応するもののサイズおよび数量を表す、工程とを備え、
前記第1の電極を形成する前記工程は、前記第1の電極を、前記第1の遠位領域と対向する関係で位置決めする工程と、第3のアパーチャを前記第1の電極内に前記第2の構成で配置されるように形成する工程とを含み、
前記第2の電極を形成する前記工程は、前記第2の電極を、前記第2の遠位領域と対向する関係で位置決めする工程と、第4のアパーチャを前記第1の電極内に前記第1の構成で配置されるように形成する工程とを含む方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/833,476 US7578190B2 (en) | 2007-08-03 | 2007-08-03 | Symmetrical differential capacitive sensor and method of making same |
| US11/833,476 | 2007-08-03 | ||
| PCT/US2008/068080 WO2009020716A1 (en) | 2007-08-03 | 2008-06-25 | Symmetrical differential capacitive sensor and method of making same |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010536036A JP2010536036A (ja) | 2010-11-25 |
| JP2010536036A5 JP2010536036A5 (ja) | 2011-08-11 |
| JP5557336B2 true JP5557336B2 (ja) | 2014-07-23 |
Family
ID=40336873
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010520025A Expired - Fee Related JP5557336B2 (ja) | 2007-08-03 | 2008-06-25 | 微小電気機械システム(mems)センサを備える装置およびそのセンサの製造方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7578190B2 (ja) |
| JP (1) | JP5557336B2 (ja) |
| CN (1) | CN101772705A (ja) |
| TW (1) | TWI439693B (ja) |
| WO (1) | WO2009020716A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013217721A (ja) * | 2012-04-06 | 2013-10-24 | Seiko Epson Corp | 物理量センサーおよび電子機器 |
| JP2014153363A (ja) * | 2013-02-06 | 2014-08-25 | Freescale Semiconductor Inc | スティクション耐性memsデバイスおよび動作方法 |
Families Citing this family (80)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006048381A1 (de) * | 2006-10-12 | 2008-04-17 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Sensor zur Erfassung von Beschleunigungen |
| DE102006058747A1 (de) * | 2006-12-12 | 2008-06-19 | Robert Bosch Gmbh | Mikromechanischer z-Sensor |
| DE102009021567A1 (de) * | 2008-05-15 | 2009-12-31 | Continental Teves Ag & Co. Ohg | Mikromechanischer Beschleunigungssensor |
| US8371167B2 (en) * | 2008-07-29 | 2013-02-12 | Pixart Imaging Inc. | In-plane sensor, out-of-plane sensor, and method for making same |
| US8171793B2 (en) * | 2008-07-31 | 2012-05-08 | Honeywell International Inc. | Systems and methods for detecting out-of-plane linear acceleration with a closed loop linear drive accelerometer |
| US8020443B2 (en) * | 2008-10-30 | 2011-09-20 | Freescale Semiconductor, Inc. | Transducer with decoupled sensing in mutually orthogonal directions |
| DE102008043788A1 (de) * | 2008-11-17 | 2010-05-20 | Robert Bosch Gmbh | Mikromechanisches Bauelement |
| CA2658141C (en) * | 2009-03-06 | 2014-07-22 | Nanometrics Inc. | Capacitive displacement transducer for a weak-motion inertial sensor |
| DE102009029095B4 (de) * | 2009-09-02 | 2017-05-18 | Robert Bosch Gmbh | Mikromechanisches Bauelement |
| DE102009029248B4 (de) * | 2009-09-08 | 2022-12-15 | Robert Bosch Gmbh | Mikromechanisches System zum Erfassen einer Beschleunigung |
| US8322216B2 (en) * | 2009-09-22 | 2012-12-04 | Duli Yu | Micromachined accelerometer with monolithic electrodes and method of making the same |
| WO2011064642A2 (ja) * | 2009-11-24 | 2011-06-03 | パナソニック電工株式会社 | 加速度センサ |
| JP5716149B2 (ja) * | 2009-11-24 | 2015-05-13 | パナソニックIpマネジメント株式会社 | 加速度センサ |
| JP2011112392A (ja) * | 2009-11-24 | 2011-06-09 | Panasonic Electric Works Co Ltd | 加速度センサ |
| JP5789737B2 (ja) * | 2009-11-24 | 2015-10-07 | パナソニックIpマネジメント株式会社 | 加速度センサ |
| JP2011112389A (ja) * | 2009-11-24 | 2011-06-09 | Panasonic Electric Works Co Ltd | 加速度センサ |
| JP2011112390A (ja) * | 2009-11-24 | 2011-06-09 | Panasonic Electric Works Co Ltd | 加速度センサ |
| US8505380B2 (en) * | 2010-02-19 | 2013-08-13 | Honeywell International Inc. | Out-of plane comb-drive accelerometer |
| US8624759B2 (en) | 2010-05-19 | 2014-01-07 | Nokia Corporation | Apparatus and method for an actuator in an electronic device |
| US20110285662A1 (en) * | 2010-05-19 | 2011-11-24 | Nokia Corporation | Apparatus and method for an actuator in an electronic device |
| JP5527019B2 (ja) | 2010-05-28 | 2014-06-18 | セイコーエプソン株式会社 | 物理量センサーおよび電子機器 |
| IT1401001B1 (it) * | 2010-06-15 | 2013-07-05 | Milano Politecnico | Accelerometro capacitivo triassiale microelettromeccanico |
| US10207719B2 (en) | 2010-07-19 | 2019-02-19 | Nxp Usa, Inc. | Use of multiple internal sensors for measurements validation |
| US8688393B2 (en) | 2010-07-29 | 2014-04-01 | Medtronic, Inc. | Techniques for approximating a difference between two capacitances |
| JP2012088120A (ja) * | 2010-10-18 | 2012-05-10 | Seiko Epson Corp | 物理量センサー素子、物理量センサーおよび電子機器 |
| US8839670B2 (en) | 2010-11-24 | 2014-09-23 | Invensense, Inc. | Anchor-tilt cancelling accelerometer |
| JP2012163507A (ja) * | 2011-02-09 | 2012-08-30 | Mitsubishi Electric Corp | 加速度センサ |
| US8927311B2 (en) | 2011-02-16 | 2015-01-06 | Freescale Semiconductor, Inc. | MEMS device having variable gap width and method of manufacture |
| JP2012173055A (ja) * | 2011-02-18 | 2012-09-10 | Seiko Epson Corp | 物理量センサー、電子機器 |
| US8596123B2 (en) * | 2011-05-05 | 2013-12-03 | Freescale Semiconductor, Inc. | MEMS device with impacting structure for enhanced resistance to stiction |
| DE102011076551B4 (de) * | 2011-05-26 | 2024-02-22 | Robert Bosch Gmbh | Inertialsensor |
| US9069005B2 (en) * | 2011-06-17 | 2015-06-30 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Capacitance detector for accelerometer and gyroscope and accelerometer and gyroscope with capacitance detector |
| US8960003B2 (en) * | 2011-09-16 | 2015-02-24 | Taiwan Semiconductor Manufacturing Company, Ltd. | Motion sensor device and methods for forming the same |
| DE102011057110A1 (de) | 2011-12-28 | 2013-07-04 | Maxim Integrated Products, Inc. | MEMS-Beschleunigungssensor |
| JP5979344B2 (ja) * | 2012-01-30 | 2016-08-24 | セイコーエプソン株式会社 | 物理量センサーおよび電子機器 |
| US8933712B2 (en) | 2012-01-31 | 2015-01-13 | Medtronic, Inc. | Servo techniques for approximation of differential capacitance of a sensor |
| JP5943192B2 (ja) * | 2012-04-10 | 2016-06-29 | セイコーエプソン株式会社 | 物理量センサーおよびその製造方法、並びに電子機器 |
| US8925384B2 (en) * | 2012-05-29 | 2015-01-06 | Freescale Semiconductor, Inc. | MEMS sensor with stress isolation and method of fabrication |
| EP2861524A4 (en) * | 2012-06-13 | 2016-07-06 | Purdue Research Foundation | MICROELECTROMECHANICAL SYSTEM (MEMS) AND METHODS OF USE |
| JP6002481B2 (ja) | 2012-07-06 | 2016-10-05 | 日立オートモティブシステムズ株式会社 | 慣性センサ |
| US9134337B2 (en) * | 2012-12-17 | 2015-09-15 | Maxim Integrated Products, Inc. | Microelectromechanical z-axis out-of-plane stopper |
| US9249008B2 (en) * | 2012-12-20 | 2016-02-02 | Industrial Technology Research Institute | MEMS device with multiple electrodes and fabricating method thereof |
| US9470709B2 (en) * | 2013-01-28 | 2016-10-18 | Analog Devices, Inc. | Teeter totter accelerometer with unbalanced mass |
| JP6142554B2 (ja) * | 2013-02-01 | 2017-06-07 | 株式会社村田製作所 | 静電容量型センサ |
| US9297825B2 (en) * | 2013-03-05 | 2016-03-29 | Analog Devices, Inc. | Tilt mode accelerometer with improved offset and noise performance |
| US9383384B2 (en) * | 2013-05-31 | 2016-07-05 | Honeywell International Inc. | Extended-range closed-loop accelerometer |
| JP6206650B2 (ja) * | 2013-07-17 | 2017-10-04 | セイコーエプソン株式会社 | 機能素子、電子機器、および移動体 |
| JP6150056B2 (ja) | 2013-07-24 | 2017-06-21 | セイコーエプソン株式会社 | 機能素子、電子機器、および移動体 |
| US9476712B2 (en) * | 2013-07-31 | 2016-10-25 | Honeywell International Inc. | MEMS device mechanism enhancement for robust operation through severe shock and acceleration |
| US9242851B2 (en) * | 2013-08-06 | 2016-01-26 | Freescale Semiconductor, Inc | MEMS device with differential vertical sense electrodes |
| JP2015072188A (ja) * | 2013-10-03 | 2015-04-16 | セイコーエプソン株式会社 | 物理量検出素子、および物理量検出装置、電子機器、移動体 |
| JP6080752B2 (ja) * | 2013-12-12 | 2017-02-15 | 三菱電機株式会社 | 加速度センサ |
| US8893563B1 (en) * | 2014-01-15 | 2014-11-25 | King Fahd University Of Petroleum And Minerals | Differential capacitance torque sensor |
| US9296606B2 (en) * | 2014-02-04 | 2016-03-29 | Invensense, Inc. | MEMS device with a stress-isolation structure |
| DE102014202816B4 (de) * | 2014-02-17 | 2022-06-30 | Robert Bosch Gmbh | Wippeneinrichtung für einen mikromechanischen Z-Sensor |
| JP6655281B2 (ja) * | 2014-08-19 | 2020-02-26 | セイコーエプソン株式会社 | 物理量センサー、電子機器および移動体 |
| CN104407172A (zh) * | 2014-12-11 | 2015-03-11 | 歌尔声学股份有限公司 | 一种新型的加速度计的z轴结构 |
| EP3038126A1 (en) * | 2014-12-22 | 2016-06-29 | DelfMEMS SAS | MEMS structure with thick movable membrane |
| US10073113B2 (en) | 2014-12-22 | 2018-09-11 | Analog Devices, Inc. | Silicon-based MEMS devices including wells embedded with high density metal |
| US9840409B2 (en) * | 2015-01-28 | 2017-12-12 | Invensense, Inc. | Translating Z axis accelerometer |
| US20160371664A1 (en) * | 2015-06-19 | 2016-12-22 | Ncr Corporation | Slotted rotatable drum and method of using same |
| US10078098B2 (en) | 2015-06-23 | 2018-09-18 | Analog Devices, Inc. | Z axis accelerometer design with offset compensation |
| CN104897334B (zh) * | 2015-06-29 | 2017-07-21 | 歌尔股份有限公司 | 一种mems压力传感元件 |
| US20170023606A1 (en) * | 2015-07-23 | 2017-01-26 | Freescale Semiconductor, Inc. | Mems device with flexible travel stops and method of fabrication |
| FI127042B (en) * | 2015-09-09 | 2017-10-13 | Murata Manufacturing Co | Electrode of a microelectromechanical device |
| JP6401868B2 (ja) * | 2015-09-15 | 2018-10-10 | 株式会社日立製作所 | 加速度センサ |
| JP6437429B2 (ja) * | 2015-12-25 | 2018-12-12 | 株式会社日立製作所 | 加速度センサ、受振器および地震探査システム |
| ITUA20162173A1 (it) | 2016-03-31 | 2017-10-01 | St Microelectronics Srl | Sensore accelerometrico mems avente elevata accuratezza e ridotta sensibilita' nei confronti della temperatura e dell'invecchiamento |
| US11268976B2 (en) * | 2017-02-23 | 2022-03-08 | Invensense, Inc. | Electrode layer partitioning |
| JP6691882B2 (ja) * | 2017-03-03 | 2020-05-13 | 株式会社日立製作所 | 加速度センサ |
| GB2566100A (en) * | 2017-09-05 | 2019-03-06 | Cirrus Logic Int Semiconductor Ltd | MEMS devices and processes |
| JP2020030067A (ja) * | 2018-08-21 | 2020-02-27 | セイコーエプソン株式会社 | 物理量センサー、センサーデバイス、電子機器、および移動体 |
| CN111273057A (zh) * | 2018-12-05 | 2020-06-12 | 苏州明皜传感科技有限公司 | 三轴加速度计 |
| IT201900000190A1 (it) * | 2019-01-08 | 2020-07-08 | St Microelectronics Srl | Dispositivo mems con geometria ottimizzata per la riduzione dell'offset dovuto all'effetto radiometrico |
| EP3792637B1 (en) * | 2019-09-11 | 2023-05-03 | Murata Manufacturing Co., Ltd. | Low-noise multi-axis mems accelerometer |
| EP3839519B1 (en) * | 2019-12-18 | 2023-11-08 | Murata Manufacturing Co., Ltd. | Microelectromechanical device with stopper |
| US11499987B2 (en) * | 2020-06-17 | 2022-11-15 | Nxp Usa, Inc. | Z-axis inertial sensor with extended motion stops |
| FR3114583B1 (fr) * | 2020-09-29 | 2022-09-16 | Commissariat Energie Atomique | Procédé de fabrication d’un transducteur électroacoustique |
| JP2022175616A (ja) * | 2021-05-14 | 2022-11-25 | セイコーエプソン株式会社 | 慣性センサー及び慣性計測装置 |
| CN113702665B (zh) * | 2021-10-27 | 2022-02-11 | 杭州麦新敏微科技有限责任公司 | 一种mems加速度计及其形成方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2617607B1 (fr) * | 1987-06-30 | 1989-12-01 | Applic Gles Electrici Meca | Accelerometre pendulaire a reequilibrage et procede de fabrication d'un tel accelerometre |
| US5195371A (en) * | 1988-01-13 | 1993-03-23 | The Charles Stark Draper Laboratory, Inc. | Semiconductor chip transducer |
| US5404749A (en) * | 1993-04-07 | 1995-04-11 | Ford Motor Company | Boron doped silicon accelerometer sense element |
| US6230566B1 (en) * | 1999-10-01 | 2001-05-15 | The Regents Of The University Of California | Micromachined low frequency rocking accelerometer with capacitive pickoff |
| US6428713B1 (en) * | 1999-10-01 | 2002-08-06 | Delphi Technologies, Inc. | MEMS sensor structure and microfabrication process therefor |
| US6571628B1 (en) * | 2000-10-16 | 2003-06-03 | Institute Of Microelectronics | Z-axis accelerometer |
| EP1419396B1 (en) * | 2001-08-20 | 2009-05-06 | Honeywell International Inc. | Arcuately shaped flexures for micro-machined electromechanical system (mems) accelerometer device |
| US6955086B2 (en) * | 2001-11-19 | 2005-10-18 | Mitsubishi Denki Kabushiki Kaisha | Acceleration sensor |
| US6666092B2 (en) * | 2002-02-28 | 2003-12-23 | Delphi Technologies, Inc. | Angular accelerometer having balanced inertia mass |
| US7005193B2 (en) * | 2003-04-29 | 2006-02-28 | Motorola, Inc. | Method of adding mass to MEMS structures |
| JP2005069852A (ja) * | 2003-08-25 | 2005-03-17 | Seiko Instruments Inc | 容量型力学量センサ |
| US7059190B2 (en) * | 2003-10-08 | 2006-06-13 | Denso Corporation | Semiconductor dynamic sensor having variable capacitor formed on laminated substrate |
| US6935175B2 (en) * | 2003-11-20 | 2005-08-30 | Honeywell International, Inc. | Capacitive pick-off and electrostatic rebalance accelerometer having equalized gas damping |
| US7140250B2 (en) * | 2005-02-18 | 2006-11-28 | Honeywell International Inc. | MEMS teeter-totter accelerometer having reduced non-linearty |
| FI119299B (fi) * | 2005-06-17 | 2008-09-30 | Vti Technologies Oy | Menetelmä kapasitiivisen kiihtyvyysanturin valmistamiseksi ja kapasitiivinen kiihtyvyysanturi |
| DE102006022811A1 (de) * | 2006-05-16 | 2007-11-22 | Robert Bosch Gmbh | Beschleunigungssensor |
-
2007
- 2007-08-03 US US11/833,476 patent/US7578190B2/en active Active
-
2008
- 2008-06-25 WO PCT/US2008/068080 patent/WO2009020716A1/en active Application Filing
- 2008-06-25 JP JP2010520025A patent/JP5557336B2/ja not_active Expired - Fee Related
- 2008-06-25 CN CN200880101859A patent/CN101772705A/zh active Pending
- 2008-07-10 TW TW097126122A patent/TWI439693B/zh not_active IP Right Cessation
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013217721A (ja) * | 2012-04-06 | 2013-10-24 | Seiko Epson Corp | 物理量センサーおよび電子機器 |
| JP2014153363A (ja) * | 2013-02-06 | 2014-08-25 | Freescale Semiconductor Inc | スティクション耐性memsデバイスおよび動作方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010536036A (ja) | 2010-11-25 |
| US7578190B2 (en) | 2009-08-25 |
| WO2009020716A1 (en) | 2009-02-12 |
| CN101772705A (zh) | 2010-07-07 |
| TW200912318A (en) | 2009-03-16 |
| US20090031809A1 (en) | 2009-02-05 |
| TWI439693B (zh) | 2014-06-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5557336B2 (ja) | 微小電気機械システム(mems)センサを備える装置およびそのセンサの製造方法 | |
| EP2106553B1 (en) | Differential capacitive sensor and method of making same | |
| JP5474946B2 (ja) | パッケージ応力を補償する応力逃がしを有する容量性センサ | |
| JP4787746B2 (ja) | トランスデューサの製造方法 | |
| US5377544A (en) | Rotational vibration gyroscope | |
| EP1879034B1 (en) | Microelectromechanical inertial sensor, in particular for free-fall detection applications | |
| JP5214984B2 (ja) | 改良型のストッパ構造を備えるz軸マイクロエレクトロメカニカルデバイス | |
| JP5627590B2 (ja) | 相互直交方向で分離的検知を有するトランスデューサ | |
| TWI445961B (zh) | 具有自由下落自我測試能力之感測器及其方法 | |
| JP2008531991A (ja) | 非線形性が低減されたmemsシーソー式加速度計 | |
| JPH05249138A (ja) | 3軸加速度計 | |
| JP2012152890A (ja) | ジグザグ形のねじりばねを有するmemsセンサ | |
| US6666092B2 (en) | Angular accelerometer having balanced inertia mass | |
| US6718826B2 (en) | Balanced angular accelerometer | |
| JP2001255153A (ja) | 分離された多ディスク・ジャイロスコープ | |
| JP2008164365A (ja) | 慣性センサおよびその製造方法、ならびに慣性センサを備えた電気・電子機器 | |
| KR100464309B1 (ko) | 면적변화정전용량형마이크로가속도계및그제조방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110623 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110623 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120227 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140530 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5557336 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |