JP2012152890A - ジグザグ形のねじりばねを有するmemsセンサ - Google Patents
ジグザグ形のねじりばねを有するmemsセンサ Download PDFInfo
- Publication number
- JP2012152890A JP2012152890A JP2011286840A JP2011286840A JP2012152890A JP 2012152890 A JP2012152890 A JP 2012152890A JP 2011286840 A JP2011286840 A JP 2011286840A JP 2011286840 A JP2011286840 A JP 2011286840A JP 2012152890 A JP2012152890 A JP 2012152890A
- Authority
- JP
- Japan
- Prior art keywords
- movable element
- torsion spring
- zigzag
- zigzag torsion
- suspension anchor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000000758 substrate Substances 0.000 claims abstract description 30
- 239000000725 suspension Substances 0.000 claims description 48
- 238000005259 measurement Methods 0.000 abstract description 8
- 238000004519 manufacturing process Methods 0.000 abstract description 7
- 238000000034 method Methods 0.000 abstract description 2
- 230000001133 acceleration Effects 0.000 description 13
- 230000035882 stress Effects 0.000 description 6
- 230000000694 effects Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 238000000059 patterning Methods 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000005549 size reduction Methods 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 230000008646 thermal stress Effects 0.000 description 1
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0822—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass
- G01P2015/0825—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass for one single degree of freedom of movement of the mass
- G01P2015/0831—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass for one single degree of freedom of movement of the mass the mass being of the paddle type having the pivot axis between the longitudinal ends of the mass, e.g. see-saw configuration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0857—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration using a particular shape of the suspension spring
- G01P2015/086—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration using a particular shape of the suspension spring using a torsional suspension spring
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Pressure Sensors (AREA)
- Micromachines (AREA)
Abstract
【解決手段】一態様では、微小電気機械システム(MEMS)センサは、複数のセグメントを有するジグザグ形のねじりばね(トーションばね)を備え、該ねじりばねは、可動要素すなわちプルーフマスを、その下にある基板の上に懸架している。さらなる一態様では、この複数のセグメントを有するジグザグ形のねじりばねは、熱によって誘起される応力による測定誤差を最小化するべく配向される。係るジグザグ形のねじりばねを有するMEMSセンサは、既存のMEMS製法を用いて製造可能である。
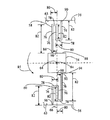
【選択図】図2
Description
回転軸66に対し平行に配置されたセグメント76を組み合わせた全体によって、加速44に応答して回転軸66の周りに可動要素56を回転させることを可能とする望ましい効果が得られる。実際に、各セグメント76の長さ82の合計に等しい全長を有するねじりばね32(図1)など、直棒のねじりばねとほぼ同じ捻ればね定数が得られる。しかしながら、3つのセグメント76の「ジグザグ形」の構成のため、第1および第2のねじりばね58,60によって占有される空間の大きさは、同じ捻ればね定数を有する従来の直棒ねじりばねの約1/3である。
Claims (20)
- 微小電気機械システム(MEMS)センサであって、
基板と、
基板の1つの表面の上に離間して配置された可動要素と、
基板の前記表面上に形成されたサスペンションアンカと、
可動要素とサスペンションアンカとを相互に接続する第1のジグザグ形のねじりばねと、
可動要素とサスペンションアンカとを相互に接続する第2のジグザグ形のねじりばねとを備え、第1および第2のジグザグ形のねじりばねは実質的に同一の形状を有し、第2のジグザグ形のねじりばねは、サスペンションアンカの中心を回転中心として第1のジグザグ形のねじりばねに対しほぼ回転対称となるように配向される、MEMSセンサ。 - 第2のジグザグ形のねじりばねは、第1のジグザグ形のねじりばねに対して約180度だけサスペンションアンカの中心の周りに回転された方向に配向される、請求項1に記載のMEMSセンサ。
- 可動要素は、可動要素の第1の端部と第2の端部との間に位置する回転軸に対して運動することができ、
サスペンションアンカの中心は前記回転軸に位置し、
第1のジグザグ形のねじりばねはサスペンションアンカに接続された第1の端部を有し、
第2のジグザグ形のねじりばねはサスペンションアンカに接続された第2の端部を有し、
第1のジグザグ形のねじりばねの第1の端部および第2のジグザグ形のねじりばねの第2の端部は、それぞれ前記回転軸の両側に前記回転軸からほぼ等しい距離だけ離間して配置されている、請求項1に記載のMEMSセンサ。 - 可動要素は、可動要素の第1の端部と第2の端部との間に位置する回転軸に対して運動することができ、
第1および第2のジグザグ形のねじりばねの各々は、前記回転軸に対しほぼ平行に配置されている、請求項1に記載のMEMSセンサ。 - 可動要素は、可動要素の第1の端部と第2の端部との間に位置する回転軸に対して運動することができ、
第1および第2のジグザグ形のねじりばねの各々は、前記回転軸に対しほぼ平行に整合して配置された複数のセグメントを含み、該セグメントは棒部材によって屈曲して連結される、請求項1に記載のMEMSセンサ。 - 棒部材の各々は第1の長さを有し、セグメントは第2の長さを有し、第1の長さは第2の長さより小さい、請求項5に記載のMEMSセンサ。
- 第1および第2のジグザグ形のねじりばねは各々少なくとも3つのセグメントを含む、請求項5に記載のMEMSセンサ。
- 可動要素は可動要素を通じて延びている開口部を備え、該開口部は可動要素の内縁部によって画定されており、
サスペンションアンカは前記開口部の中心に配置されており、
第1のジグザグ形のねじりばねは、サスペンションアンカの第1の側に接続された第1の端部と、可動要素の内縁部に接続された第2の端部とを有し、
第2のジグザグ形のねじりばねは、サスペンションアンカの第1の側に対向する第2の側に接続された第3の端部と、可動要素の内縁部に接続された第4の端部とを有する、請求項1に記載のMEMSセンサ。 - 可動要素は、可動要素の第1の端部と第2の端部との間に位置する回転軸に対して運動することができ、
前記センサは、基板上であって可動要素の下に配置された感知要素を含み、感知要素は、基板の1つの平面に対し垂直な軸に沿って前記回転軸の周りの第1の位置から第2の位置までの運動を可動要素の移動を検出するべく適合されている、請求項1に記載のMEMSセンサ。 - 微小電気機械システム(MEMS)センサを備えるデバイスであって、
前記MEMSセンサは、
基板と、
基板の1つの表面の上に離間して配置された可動要素であって、該可動要素の第1の端部と第2の端部との間に位置する回転軸に対して運動することができる可動要素と、
基板の前記表面上に形成されたサスペンションアンカであって、前記回転軸に位置する中心を有するサスペンションアンカと、
可動要素とサスペンションアンカとを相互に接続する第1のジグザグ形のねじりばねと、
可動要素とサスペンションアンカとを相互に接続する第2のジグザグ形のねじりばねとを備え、第1および第2のジグザグ形のねじりばねは実質的に同一の形状を有し、第2のジグザグ形のねじりばねは、サスペンションアンカの中心を回転中心として第1のジグザグ形のねじりばねに対しほぼ回転対称となるように配向される、MEMSセンサ。 - 第2のジグザグ形のねじりばねは、第1のジグザグ形のねじりばねに対して約180度だけサスペンションアンカの中心の周りに回転された方向に配向される、請求項10に記載のデバイス。
- 棒部材の各々は第1の長さを有し、セグメントは第2の長さを有し、第1の長さは第2の長さより小さい、請求項10に記載のデバイス。
- 第1および第2のジグザグ形のねじりばねは各々少なくとも3つのセグメントを含む、請求項10に記載のデバイス。
- 可動要素は可動要素を通じて延びている開口部を備え、該開口部は可動要素の内縁部によって画定されており、
サスペンションアンカは前記開口部の中心に配置されており、
第1のジグザグ形のねじりばねは、サスペンションアンカの第1の側に接続された第1の端部と、可動要素の内縁部に接続された第2の端部とを有し、
第2のジグザグ形のねじりばねは、サスペンションアンカの第1の側に対向する第2の側に接続された第3の端部と、可動要素の内縁部に接続された第4の端部とを有する、請求項10に記載のデバイス。 - 前記センサは、基板上であって可動要素の下に配置された感知要素を含み、感知要素は、基板の1つの平面に対し垂直な軸に沿って前記回転軸の周りの第1の位置から第2の位置までの運動を可動要素の移動を検出するべく適合されている、請求項10に記載のデバイス。
- 微小電気機械システム(MEMS)センサであって、
基板と、
基板の1つの表面の上に離間して配置された可動要素であって、該可動要素を通じて延びている開口部を備え、該開口部は可動要素の内縁部によって画定されており、該可動要素は、該可動要素の第1の端部と第2の端部との間に位置する回転軸に対して運動することができる可動要素と、
基板の前記表面上に形成されたサスペンションアンカであって、前記開口部の中心に配置されているサスペンションアンカと、
可動要素とサスペンションアンカとを相互に接続する第1のジグザグ形のねじりばねであって、前記回転軸に対しほぼ平行に配置されており、サスペンションアンカの第1の側に接続された第1の端部と、可動要素の内縁部に接続された第2の端部とを有する第1のジグザグ形のねじりばねと、
可動要素とサスペンションアンカとを相互に接続する第2のジグザグ形のねじりばねであって、前記回転軸に対しほぼ平行に配置されており、サスペンションアンカの第1の側に対向する第2の側に接続された第3の端部と、可動要素の内縁部に接続された第4の端部とを有する第2のジグザグ形のねじりばねと、を備え、第1および第2のジグザグ形のねじりばねは実質的に同一の形状を有し、第2のジグザグ形のねじりばねは、サスペンションアンカの中心を回転中心として第1のジグザグ形のねじりばねに対しほぼ回転対称となるように配向される、MEMSセンサ。 - 第2のジグザグ形のねじりばねは、第1のジグザグ形のねじりばねに対して約180度だけサスペンションアンカの中心の周りに回転された方向に配向される、請求項16に記載のMEMSセンサ。
- サスペンションアンカの中心は前記回転軸に位置し、
第1のジグザグ形のねじりばねの第1の端部および第2のジグザグ形のねじりばねの第3の端部は、それぞれ前記回転軸の両側に前記回転軸からほぼ等しい距離だけ離間して配置されている、
請求項16に記載のMEMSセンサ。 - 第1および第2のジグザグ形のねじりばねの各々は、前記回転軸に対し平行に整合して配置された少なくとも3つのセグメントを含み、該セグメントは棒部材によって屈曲して連結されており、棒部材の各々は第1の長さを有し、セグメントは第2の長さを有し、第1の長さは第2の長さより小さい、請求項16に記載のMEMセンサ。
- 前記センサは、基板上であって可動要素の下に配置された感知要素を含み、感知要素は、基板の1つの平面に対し垂直な軸に沿って前記回転軸の周りの第1の位置から第2の位置までの運動を可動要素の移動を検出するべく適合されている、請求項16に記載のMEMSセンサ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/012,643 | 2011-01-24 | ||
| US13/012,643 US8555719B2 (en) | 2011-01-24 | 2011-01-24 | MEMS sensor with folded torsion springs |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012152890A true JP2012152890A (ja) | 2012-08-16 |
| JP2012152890A5 JP2012152890A5 (ja) | 2015-02-05 |
| JP5924521B2 JP5924521B2 (ja) | 2016-05-25 |
Family
ID=45470466
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011286840A Active JP5924521B2 (ja) | 2011-01-24 | 2011-12-27 | ジグザグ形のねじりばねを有するmemsセンサ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8555719B2 (ja) |
| EP (1) | EP2479580B1 (ja) |
| JP (1) | JP5924521B2 (ja) |
| CN (1) | CN102602875B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015059830A (ja) * | 2013-09-19 | 2015-03-30 | 株式会社デンソー | 加速度センサ |
| US20160187372A1 (en) * | 2014-12-25 | 2016-06-30 | Semiconductor Manufacturing International (Shanghai) Corporation | Accelerometer with little cross effect |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8839670B2 (en) * | 2010-11-24 | 2014-09-23 | Invensense, Inc. | Anchor-tilt cancelling accelerometer |
| DE102011076551B4 (de) * | 2011-05-26 | 2024-02-22 | Robert Bosch Gmbh | Inertialsensor |
| ITTO20110782A1 (it) * | 2011-08-31 | 2013-03-01 | Milano Politecnico | Struttura di rilevamento perfezionata per un accelerometro risonante ad asse z |
| US9290067B2 (en) * | 2012-08-30 | 2016-03-22 | Freescale Semiconductor, Inc. | Pressure sensor with differential capacitive output |
| US9176157B2 (en) * | 2012-12-05 | 2015-11-03 | Maxim Integrated Products, Inc. | Micro-electromechanical structure with low sensitivity to thermo-mechanical stress |
| DE102013208824A1 (de) * | 2013-05-14 | 2014-11-20 | Robert Bosch Gmbh | Beschleunigungssensor |
| DE102013209238B4 (de) * | 2013-05-17 | 2017-10-12 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | MEMS-Struktur und Verfahren zum Herstellen derselben |
| US9335340B2 (en) * | 2013-07-23 | 2016-05-10 | Freescale Semiconductor, Inc. | MEMS parameter identification using modulated waveforms |
| DE102013216915A1 (de) * | 2013-08-26 | 2015-02-26 | Robert Bosch Gmbh | Mikromechanischer Sensor und Verfahren zur Herstellung eines mikromechanischen Sensors |
| TWI580632B (zh) * | 2014-03-14 | 2017-05-01 | 財團法人工業技術研究院 | 具用於旋轉元件之摺疊彈簧的微機電裝置 |
| JP6655281B2 (ja) * | 2014-08-19 | 2020-02-26 | セイコーエプソン株式会社 | 物理量センサー、電子機器および移動体 |
| CN105584984B (zh) * | 2014-10-20 | 2018-02-02 | 立锜科技股份有限公司 | 微机电装置 |
| CN205090976U (zh) * | 2014-12-11 | 2016-03-16 | 意法半导体股份有限公司 | 微机电检测结构、微机电传感器和电子器件 |
| CN105819390B (zh) * | 2015-01-04 | 2019-05-21 | 上海矽睿科技有限公司 | 传感器 |
| US20170089945A1 (en) * | 2015-09-29 | 2017-03-30 | Freescale Semiconductor, Inc. | Mems sensor with reduced cross-axis sensitivity |
| CN105366627B (zh) * | 2015-11-24 | 2017-03-22 | 中北大学 | 一种适应高过载环境的mems器件保护机构 |
| US10126129B2 (en) * | 2016-07-11 | 2018-11-13 | Nxp Usa, Inc. | Vibration and shock robust gyroscope |
| US20180031599A1 (en) * | 2016-07-27 | 2018-02-01 | Khalifa University of Science and Technology | Optically enabled micro-disk inertia sensor |
| EP3509837A4 (en) | 2016-09-07 | 2020-04-22 | The Government Of The United States Of America As The Secretary of The Navy | ELECTROMECHANICAL SILICON CARBIDE STRUCTURE, ASSOCIATED DEVICES AND METHOD |
| US10520526B2 (en) | 2016-10-11 | 2019-12-31 | Analog Devices, Inc. | Folded tether structure for MEMS sensor devices |
| DE102016220510A1 (de) | 2016-10-19 | 2018-04-19 | Robert Bosch Gmbh | Mikromechanischer z-Beschleunigungssensor |
| CN108088477B (zh) * | 2016-11-21 | 2020-09-22 | 清华大学 | 翘板式电容差分传感器及传感系统 |
| US10429407B2 (en) | 2017-03-27 | 2019-10-01 | Nxp Usa, Inc. | Three-axis inertial sensor for detecting linear acceleration forces |
| CN107314808B (zh) * | 2017-08-14 | 2020-05-05 | 武汉理工大学 | 一种基于扭转光纤光栅的二维振动传感器 |
| JP2019045172A (ja) | 2017-08-30 | 2019-03-22 | セイコーエプソン株式会社 | 物理量センサー、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 |
| JP2019045171A (ja) | 2017-08-30 | 2019-03-22 | セイコーエプソン株式会社 | 物理量センサー、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 |
| JP2019045170A (ja) * | 2017-08-30 | 2019-03-22 | セイコーエプソン株式会社 | 物理量センサー、複合センサー、慣性計測ユニット、携帯型電子機器、電子機器及び移動体 |
| US10809277B2 (en) | 2017-12-18 | 2020-10-20 | Nxp Usa, Inc. | Single axis inertial sensor with suppressed parasitic modes |
| DE102018216611B4 (de) * | 2018-05-22 | 2022-01-05 | Infineon Technologies Ag | MEMS-Bauelement mit Aufhängungsstruktur und Verfahren zum Herstellen eines MEMS-Bauelementes |
| US10816569B2 (en) | 2018-09-07 | 2020-10-27 | Analog Devices, Inc. | Z axis accelerometer using variable vertical gaps |
| US11255873B2 (en) * | 2018-09-12 | 2022-02-22 | Analog Devices, Inc. | Increased sensitivity z-axis accelerometer |
| DE102018222615B4 (de) * | 2018-12-20 | 2021-09-02 | Robert Bosch Gmbh | Bauelement mit einer optimierten mehrlagigen Torsionsfeder |
| US10703625B1 (en) | 2019-03-29 | 2020-07-07 | Industrial Technology Research Institute | Microelectromechanical system (MEMS) apparatus with adjustable spring |
| JP2021006794A (ja) * | 2019-06-28 | 2021-01-21 | セイコーエプソン株式会社 | 慣性センサー、電子機器および移動体 |
| US11105826B2 (en) | 2019-09-19 | 2021-08-31 | Nxp Usa, Inc. | Inertial sensor with integrated damping structures |
| DE102020119371B3 (de) | 2020-07-22 | 2021-08-05 | IMMS Institut für Mikroelektronik- und Mechatronik-Systeme gemeinnützige GmbH (IMMS GmbH) | Mikroelektromechanischer Beschleunigungssensor |
| US20220050124A1 (en) * | 2020-08-17 | 2022-02-17 | Nxp Usa, Inc. | Inertial sensor with split anchors and flexure compliance between the anchors |
| CN113090638B (zh) * | 2021-03-29 | 2022-03-04 | 齐鲁工业大学 | 一种柔性铰链及应用 |
| US12072350B2 (en) * | 2022-06-23 | 2024-08-27 | Knowles Electronics, Llc | Suspension for a mems vibration sensor |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006018250A (ja) * | 2004-06-02 | 2006-01-19 | Sumitomo Precision Prod Co Ltd | Memsミラースキャナ |
| US20100186508A1 (en) * | 2009-01-26 | 2010-07-29 | Sebastian Guenther | Sensor device and method for manufacturing a sensor device |
| JP2011191593A (ja) * | 2010-03-16 | 2011-09-29 | Canon Inc | マイクロ構造体及びその製造方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6831765B2 (en) * | 2001-02-22 | 2004-12-14 | Canon Kabushiki Kaisha | Tiltable-body apparatus, and method of fabricating the same |
| US6935759B1 (en) | 2002-02-19 | 2005-08-30 | Glimmerglass Networks, Inc. | Folded longitudinal torsional hinge for gimbaled MEMS mirror |
| US6718826B2 (en) * | 2002-02-28 | 2004-04-13 | Delphi Technologies, Inc. | Balanced angular accelerometer |
| US6845670B1 (en) * | 2003-07-08 | 2005-01-25 | Freescale Semiconductor, Inc. | Single proof mass, 3 axis MEMS transducer |
| DE102007060942A1 (de) * | 2007-12-18 | 2009-06-25 | Robert Bosch Gmbh | Drehratensensor und Verfahren zum Betrieb eines Drehratensensors |
| DE102008001442A1 (de) * | 2008-04-29 | 2009-11-05 | Robert Bosch Gmbh | Mikromechanisches Bauelement und Verfahren zum Betrieb eines mikromechanischen Bauelements |
| US8056415B2 (en) * | 2008-05-30 | 2011-11-15 | Freescale Semiconductor, Inc. | Semiconductor device with reduced sensitivity to package stress |
| JP5513184B2 (ja) | 2010-03-16 | 2014-06-04 | キヤノン株式会社 | マイクロ構造体及びその製造方法 |
| IT1401001B1 (it) | 2010-06-15 | 2013-07-05 | Milano Politecnico | Accelerometro capacitivo triassiale microelettromeccanico |
| CN101881785B (zh) * | 2010-06-22 | 2011-11-30 | 吉林大学 | 四折叠梁变面积差分电容结构微加速度传感器及制备方法 |
| DE102010039069B4 (de) * | 2010-08-09 | 2023-08-24 | Robert Bosch Gmbh | Beschleunigungssensor mit einer Dämpfungseinrichtung |
-
2011
- 2011-01-24 US US13/012,643 patent/US8555719B2/en active Active
- 2011-12-27 JP JP2011286840A patent/JP5924521B2/ja active Active
-
2012
- 2012-01-18 EP EP12151630.6A patent/EP2479580B1/en active Active
- 2012-01-19 CN CN201210017188.1A patent/CN102602875B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006018250A (ja) * | 2004-06-02 | 2006-01-19 | Sumitomo Precision Prod Co Ltd | Memsミラースキャナ |
| US20100186508A1 (en) * | 2009-01-26 | 2010-07-29 | Sebastian Guenther | Sensor device and method for manufacturing a sensor device |
| JP2011191593A (ja) * | 2010-03-16 | 2011-09-29 | Canon Inc | マイクロ構造体及びその製造方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015059830A (ja) * | 2013-09-19 | 2015-03-30 | 株式会社デンソー | 加速度センサ |
| US20160187372A1 (en) * | 2014-12-25 | 2016-06-30 | Semiconductor Manufacturing International (Shanghai) Corporation | Accelerometer with little cross effect |
| US9823267B2 (en) * | 2014-12-25 | 2017-11-21 | Semiconductor Manufacturing International (Shanghai) Corporation | Accelerometer with little cross effect |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2479580B1 (en) | 2014-09-10 |
| CN102602875B (zh) | 2016-04-13 |
| JP5924521B2 (ja) | 2016-05-25 |
| US8555719B2 (en) | 2013-10-15 |
| CN102602875A (zh) | 2012-07-25 |
| EP2479580A1 (en) | 2012-07-25 |
| US20120186346A1 (en) | 2012-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5924521B2 (ja) | ジグザグ形のねじりばねを有するmemsセンサ | |
| JP5852437B2 (ja) | デュアルプルーフマスを有するmemsセンサ | |
| TWI494263B (zh) | 具有互相正交方向中解偶感測之傳感器 | |
| EP3121605B1 (en) | Multi-axis inertial sensor with dual mass and integrated damping structure | |
| US8096182B2 (en) | Capacitive sensor with stress relief that compensates for package stress | |
| EP3151018B1 (en) | Mems sensor with reduced cross-axis sensitivity | |
| JP6366170B2 (ja) | 多軸速度センサ | |
| JP5965934B2 (ja) | 改善されたオフセットおよびノイズ性能を有する傾斜モード加速度計 | |
| CN106915721B (zh) | 具有中央固定座的微机电装置 | |
| US20110174074A1 (en) | Framed transducer device | |
| JP2011523905A (ja) | パッケージ応力に対する感度を低くした半導体装置 | |
| WO2010055716A1 (ja) | 加速度センサ | |
| JP2012517002A (ja) | 加速度センサおよび加速度センサの作動方法 | |
| JP2022503690A (ja) | 向上した感度のz軸加速度計 | |
| US9035400B2 (en) | Micro electro mechanical systems device | |
| US11499987B2 (en) | Z-axis inertial sensor with extended motion stops | |
| US20220050124A1 (en) | Inertial sensor with split anchors and flexure compliance between the anchors |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141212 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141212 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20151120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20151201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160229 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160322 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160406 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5924521 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |