CN101772705A - 对称差动电容式传感器及其制造方法 - Google Patents
对称差动电容式传感器及其制造方法 Download PDFInfo
- Publication number
- CN101772705A CN101772705A CN200880101859A CN200880101859A CN101772705A CN 101772705 A CN101772705 A CN 101772705A CN 200880101859 A CN200880101859 A CN 200880101859A CN 200880101859 A CN200880101859 A CN 200880101859A CN 101772705 A CN101772705 A CN 101772705A
- Authority
- CN
- China
- Prior art keywords
- parts
- hole
- electrode
- turning axle
- moving element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0822—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass
- G01P2015/0825—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass for one single degree of freedom of movement of the mass
- G01P2015/0831—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass for one single degree of freedom of movement of the mass the mass being of the paddle type having the pivot axis between the longitudinal ends of the mass, e.g. see-saw configuration
Abstract
一种对称差动电容式传感器(60),包括围绕几何居中的旋转轴(70)可枢转的可动元件(66)。元件(66)包括部件(86,88)。部件(86,88)的每个具有与旋转轴(70)距离相等的止动器(94,96)。部件(86,88)的每个也具有孔(102,106)的不同配置(104,108)。孔(102,106)的配置(104,108)造成部件(86,88)之间的质量不平衡,使得元件(66)响应于加速度围绕旋转轴(70)枢转。孔(102,106)也可在制造期间促进蚀刻释放,并在元件(66)旋转时减少空气阻尼。孔(126,128)形成于位于孔(102,106)之下的电极(78,80)中,来匹配可动元件(86)的两部件(86,88)之间的电容,以提供相同的双向激励能力。
Description
技术领域
本发明总体上涉及微机电系统(MEMS)传感器。更具体地,本发明涉及MEMS对称差动电容式加速计。
背景技术
加速计是典型地用于测量加速力的传感器。这些力可以是静态的,如重力的恒力,或者它们也可以是动态的,由运动或振动加速计产生。加速计可以沿一个、两个或三个轴或方向感测加速度或其他现象。根据此信息,可以确定在其中安装了加速计的设备的运动或方位。加速计被用于内部引导系统、车辆的安全气囊展开系统、多种设备的保护系统,以及许多其他的科学和工程学系统中。
由于其相对价格低廉,电容式感测MEMS加速计设计非常值得在高重力环境和小型化的设备中运行。电容式加速计感测与加速度相关的电容的变化,以改变带电电路的输出。加速计的一个普遍形式是具有“跷跷板”或“秋千”配置的两层电容式换能器。该普遍应用的换能器类型使用在基底上的在z轴加速度下旋转的可动元件或板。该加速计结构可以测量两个不同的电容以确定差动或相对电容。
图1示出现有技术不对称电容式加速计20的侧视图,其被构造为常规的铰接或“跷跷板”型传感器。电容式加速计20包括静态基底22,其具有预定配置的金属电极元件24和26沉积在表面上,以形成相应的电容器电极或“板”。普遍称为“检测质量(proof mass)”的可动元件28由扭力式悬挂元件30柔性悬挂于基底22之上并绕由双向箭头32表示的旋转轴旋转。在旋转轴32一侧上的可动元件28的部件34被形成为比在旋转轴32另一侧上的可动元件28的部件36具有相对更大的质量。典型地通过从可动元件28的几何中心38偏置旋转轴32而产生部件34的该更大质量。由于旋转轴32两侧的质量不同,可动元件28响应于加速度枢转或旋转,从而改变其相对于静态感测电极24和26的位置。该位置的改变导致可动元件28和每一个电极24和26之间的电容的改变。图1所示的电容器40和42表示该电容,或更具体地是当可动元件28响应于加速度枢转时表示电容的改变。该电容之间的差,即差动电容,表示加速度。应当理解的是,电容器40和42表示该电容,并且不是加速计20的实际组件。
当加速计20承受高加速度时,可动部件28可以旋转并接触基底22,从而避免进一步旋转。该止动特征用于避免可动元件28的结构故障和/或避免任一电容器40和42的短路。在一些实施例中,可以将止动器或柱形结构44实现在可动元件28的相对的纵向末端46上作为该止动特征。止动器44的相对较小的表面区域会在很大程度上避免可动元件28粘在下面的电极和/或基底上。也就是说,在没有止动器44时,可动元件28的该较大表面区域将会粘在下面的电极和/或基底上,从而使得加速计20不可用。
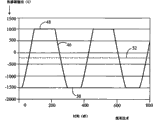
图2表示正弦激励下的不对称加速计20(图1)的示例性的输出信号46的图表。由于其不对称配置以及止动器44的不对称布置,可动元件28在正负方向之间止动在不同的加速度振幅上。止动器导致在正加速度值上的削波48不同于在负加速度值上的削波50。这产生了在超载响应下的非零时间平均输出值52。正弦激励的时间平均输出值应当为零,所以非零值52可引起加速度测量的不准确性,以及加速计20被合成于其中的设备的可能的故障。
再参考图1,有时激励电极(未示出)被布置在基底22上,在可动元件28的部件34的下方并在电极24旁边。这样的激励电极可以用于自检活动。不幸地,使用在旋转轴32一侧的单个激励电极只允许在单个方向的自检。一些方法要求两个方向的激励,即双向自检。对于加速计20的不对称结构,一种实现双向自检的技术是减少两个电极24和26的有效区域并利用该区域中的一些作为附加的一对激励电极。不幸地,电极24和26的区域的损失可能导致加速计性能下降。
附图说明
当结合附图考虑时,可通过参考详细说明和权利要求得出对本发明的更加完整的理解,其中在各个图中相同附图标记表示类似项目,并且:
图1示出现有技术不对称电容式加速计的侧视图,其被构造为常规铰接或“跷跷板”型传感器;
图2示出正弦激励下的图1中的不对称加速计的示例性输出信号的图表;
图3示出依照本发明的对称差动电容式传感器的顶视图;
图4示出图3的对称差动电容式传感器的侧视图;
图5示出布置在图3的传感器的基底上的电极的顶视图;
图6示出依照本发明的差动电容式传感器在处理期间的侧视图;
图7示出依照本发明另一实施例的对称差动电容式传感器的顶视图;
图8示出布置在图7的传感器的基底上的电极的顶视图;以及
图9示出该差动电容式传感器可以被安装于其中的设备。
具体实施方式
参考图3和图4,图3示出依照本发明的对称差动电容式传感器60的透视图,图4示出对称差动电容式传感器60的侧视图。传感器60可以是例如微机电系统(MEMS)加速计或其他MEMS感测设备。为了接下来的讨论,在下文中将传感器60称为电容式加速计60。电容式加速计60具有几何对称的跷跷板配置,其消除由不对称削波引起的非零时间平均输出值,使芯片区的利用最优化以提供更好的感测,并允许足够的静电激励,可用于双向自检和/或“闭环”或反馈设计。
电容式加速计60包括布置在基底64上的静态导电层62。另一个导电层,这里称作可动感测元件66,形成于导电层62之上。可动感测元件66由铰链元件68支撑,并被允许绕由铰链元件68限定的旋转轴70枢转。应当理解的是,许多弯曲部件、铰链及其他旋转机构可以用于使可动感测元件66绕旋转轴70枢转运动。
静态导电层62包括至少一个电极,其是放置在基底64上的四个电极或板的形式并面向可动元件66的表面72。这些电极包括与另一个感测电极76电隔离的感测电极74,和与激励电极80电隔离的激励电极78。感测电极74和76及激励电极78和80位于可动元件66下方。因此,在图3的顶视图中,电极正常时不会可见,由虚线表示电极74、76、78和80以表明其相对于可动元件66和旋转轴70的位置。
如以上简单提到的,电容式加速计60具有几何对称的跷跷板配置。最终,铰链元件68被放置为使得旋转轴70在可动元件66的端部82和84之间基本几何居中。部件86形成于旋转轴70与端部82之间,而部件88形成于旋转轴70与端部84之间。根据总几何构型,从端部82到旋转轴70的长度90基本上等于端部84与旋转轴70之间的长度90。可动元件66基本上是矩形的。因此,每一个部件86和88的宽度92也基本上相等。
止动器94和96分别在端部82和84从可动元件66的表面72朝向基底64延伸。当止动器94和96接触相应的设置在基底64上的专用接触板98和100时,可动元件66的枢转运动被止动,并保持与止动器94和96相同的电位。止动器94和96被设置为距旋转轴70相等的距离。因此,在正负方向上在基本上相同的加速度幅值将可动元件66止动。因此,消除了现有技术设计中的由不对称削波引起的非零时间平均输出值。
在可动元件66上需要产生绕旋转轴70的运动的力矩或趋势,以使电容式加速计60执行其感测功能。通过在部件86和88的每个中形成尺寸和/或数量不同的延伸贯通可动元件66的孔来实现这点。例如,以配置104来设置部件86中的孔102,并且以配置108来设置部件88中的孔106。配置104和108描述在相应部分86和88中的孔102和106的对应一个孔的尺寸和数量。例如,在配置104中的孔102比配置108的孔106的直径小并且数量少。
通过在部件86中放置较小和/或较少的孔102以及在部件88中放置较大和较多的孔106,产生关于旋转轴70的质量的不平衡。通过将孔102和106放置在旋转轴70的远端从而增加可动元件66的力臂,有效地增大该质量的不平衡。在此情形中,部件88的质量比部件86小。由于该不平衡,由输入加速度产生力矩以使可动元件66绕旋转轴70枢转。因此,通过检测形成于对应的感测电极74和76与可动元件66之间的电容器110和电容器112之间的差动电容信号而实现该感测功能。此外,通过形成于激励电极78和可动元件66之间的电容器111以及形成于激励电极80和可动元件66之间的电容器113来实现激励功能。虽然示出两个配置104和108,但明显的是,只要其能引起关于旋转轴70不平衡的可动元件66,可以实现孔102和106的尺寸和数量的变化。
孔102和106另外还用于当可动元件66枢转时使空气的阻尼效应最优化。阻尼器是调节机械的、声学的、电子的或空气动力学的振荡的振幅的实体。在可动元件66和基底64之间的空气作为阻尼器,并且可导致不需要的高阻尼。不需要的高阻尼可使可动元件66响应过慢,特别是对于大的加速度。相反地,如果可动元件66与基底64之间俘获的空气量不够,可动元件66可振荡过多,导致加速度测量的不准确和过载。孔102和106允许可动元件66和之下的结构之间的一些空气溢出以适当地控制空气阻尼效应。
图5示出布置于电容式加速计60的基底64上的电极74、76、78、80的顶视图。在图5的顶视图中,由虚线表示可动元件66以说明其相对于电极74、76、78和80的位置。一般的,部件86可以被表征为具有邻近旋转轴70放置的近侧区域114和邻近端部82放置的远侧区域116。同样的,部件88可以被表征为具有邻近旋转轴70放置的近侧区域118和邻近端部84放置的远侧区域120。
在实施例中,感测电极74面向部件86的近侧区域114,而感测电极76面向部件88的近侧区域118。更重要地,将感测电极74和76相对于旋转轴70对称地安排,使得每个电极74和76与旋转轴70之间的距离122基本上相等。激励电极78面向部件86的远侧区域116,并且激励电极80面向部件88的远侧区域120。和电极74和76一样,将激励电极78和80相对于旋转轴70对称地安排,使得每个电极78和80与旋转轴70之间的距离124基本上相等。
和可动元件66的部件88中的孔106(图3)一样,激励电极78具有以配置108安排的孔126。此外,和可动元件66的部件86中的孔102(图3)一样,激励电极80具有以配置104安排的孔128。电极74、76的对称放置产生匹配电容,即,在电容器110和112(图4)之间的相等且相对的电容。这在两个方向提供了感测电极74,76的相等感测能力。电极78、80的对称放置以及孔126相对于孔106以及孔128相对于孔102的“镜像”或翻转对称在电容器111和113(图4)之间产生匹配电容。这在两个方向提供了激励电极78、80的相等激励能力。
当在任一激励电极78和80与可动元件66之间施加偏压时,可有效地产生静电力以提供激励功能。可动元件66的部件86的远侧区域116的净表面区域不同于可动元件66的部件88的远侧区域120的净区域。在该情形中,配置104(图3)包括比配置108(图3)更小且数量更少的孔102。因此,部件86的远侧区域116中的剩余可动元件66的净表面区域大于部件88的远侧区域120中的剩余可动元件66的净表面区域。
边缘电场描述归于周界尺寸的电场通量。即,该电场集中在边缘,诸如在孔102和106(图3)的每个的周界上。由于边缘电场,仍可以在部件86和88之间以合理的程度匹配电极78和80与可动元件66之间的电容,因此也从两个方向在激励电极78和80上提供相等的激励能力。
激励电极78和80分别有利地为“自检”操作和/或反馈“闭环”操作提供激励。对于“自检”操作,其可以提供大量的激励以检测差动加速计60的功能。对于反馈操作,其提供抵消大的加速度的能力。因此,在反馈操作中,可以将反馈信号施加到激励电极78和80以用电容感测可动元件66的位置,并向该激励电极提供静电偏压以保持该可动元件固定,或在特定频率范围内限制运动。例如,可以限制运动以允许高频运动但抵消低频运动,诸如任何由封装压力引起的温度和/或时间相关的偏移量。因此,电容式加速计60的对称的跷跷板设计进一步为自检、反馈、偏移消除等提供有效的双向激励。
应当注意的是,电极74和78的组合基本上在可动元件66的部件86的整体的下方。类似地,电极76和80的组合基本上在可动元件66的部件88的整体的下方。与现有技术的不对称检测质量配置具有未使用的屏蔽区域相比,该配置使得可动元件66的全部表面区域得到充分利用。此外,该配置考虑到最佳尺寸的检测质量,即可动元件66,同时实现电容器110和112的重要的电容输出及考虑到激励电极78和80上的充足的激励电压。
图6示出依照本发明的在处理期间的差动电容式传感器60的侧视图。基底64可以是包括硅的半导体晶片,虽然也可以利用任何机械支撑基底。依照常规制造实践,如果基底64不导电,绝缘层130可以形成于基底64的表面上。静态导电层62可以包括多晶硅,虽然也可以采用其他导电材料。可以通过诸如沉积和溅射的已知方法形成导电层62。例如,可以将导电层62作为覆盖层沉积在基底64的表面上,并随后将其图案化并蚀刻以形成感测电极74和76,以及分别具有孔126和128的激励电极78和80(图5)。然后可以将接触板98和100形成在基底64上。可以通过已知方法并从已知材料形成接触板98和100。保护层(未示出)可以可选择地被沉积在导电层62上以及依需要被图案化并蚀刻以在进一步处理步骤期间保护基底64并防止导电层62和可动元件66之间的短路和/或焊接。
随后将牺牲层132形成在被图案化并蚀刻的导电层62及接触板98和100上。和前面的层一样,也可以依需要共形地形成牺牲层132并随后将其图案化并蚀刻。例如,可以在牺牲层132中形成接触开口用来沉积用以将铰链元件68机械连接到基底64的铰链锚133。如本领域技术人员所知,牺牲层132典型地为氧化硅,并可以通过化学汽相沉积来沉积。应当理解的是,可以使用其它牺牲材料代替氧化硅,诸如磷硅酸盐玻璃或硼磷硅酸盐玻璃。
下一个导电层,即,具有止动器82和84的可动元件66,包括多晶硅,并且通过已知方法被形成为置于导电层62上方的跷跷板结构。此外,可以通过已知方法在可动元件66中图案化并蚀刻孔102和孔106(图3)。在一实施例中,可以在单个工艺中掩膜、图案化及蚀刻该导电层以限定可动元件66的各个元件。在所描述的实施例中,这些包括铰链锚133、铰链元件68、具有止动器82和84及孔102和106的可动元件66。如本领域技术人员所知,随后可被执行的其它沉积工艺包括,例如在可动元件66之上的另一个牺牲层的沉积等等。
在形成以上描述的结构之后,将牺牲层132移除使得该可动元件66自由枢转。例如,可以采用选择性的蚀刻剂,能够移除磷硅酸盐玻璃牺牲层而一点都不破坏静态导电层62和可动元件66的多晶硅。可动元件66中的孔102和106(图3)在电容式加速计60的制造期间另外提供有用的功能。可通过孔102和106将蚀刻剂应用于牺牲层132。这有效地增加了蚀刻剂的传播从而促进在制造期间的牺牲层132的蚀刻及所后的从下面的结构中释放可动元件66。
参考图7-8,图7示出依据本发明另一实施例的对称差动电容式传感器134的顶视图,图8示出布置在传感器134的基底140上的电极136和138的顶视图。应当注意的是,电极136和138在可动元件142之下。因此,在图7的顶视图中,由虚线表示电极136和138以说明其相对于可动元件142的几何居中的旋转轴144的位置。此外,在图8的顶视图中由虚线表示可动元件142以说明其相对于电极136和138的位置。
电容式传感器134包括电容式加速计60的几个特征,诸如包括以配置104安排的孔102和以配置108安排的孔106的可动元件142,和铰链元件68。此外,电极136包括以配置108安排的孔126,并且孔138包括以配置106安排的孔128。还相对于旋转轴144对称地安排电极136和138。在上文中结合图3-5讨论了这些特征,为了简便这里不再对其描述和优点进行复述。
传感器134的可动元件142包括部件146和部件148,其限定由旋转轴144描述的元件142的相对两半。在孔102的配置104的附近,将材料150设置在可动元件142的部件146上。材料150可以是例如设置于可动元件142的部件146上的金属或其他材料。可以根据每种已知工艺来沉积和图案化材料150。材料150用于进一步增加可动元件142的部件146相对于部件148的质量,以致在部件146和148之间产生更大的不平衡。所以,可以增加传感器134的灵敏度而不改变扭转弹簧常数或不增大传感器尺寸。
通常,可动元件142的部件146可以被表征为具有邻近旋转轴144放置的近侧区域152和邻近可动元件142的端部156放置的远侧区域154。同样的,部件148可以被表征为具有邻近旋转轴144放置的近侧区域158和邻近端部162放置的远侧区域160。可动元件142包括延伸贯通部件146的近侧区域152的孔164,和延伸贯通部件148的近侧区域158的孔166。以定义孔164和166的数量和尺寸的公共配置168来安排孔162和164的每个。孔164和166也对称地位于旋转轴144的相对侧。由于其公共配置168以及相对于旋转轴144的对称的位置,孔164和166不用于在部件146和148之间产生质量不平衡。更确切地,孔164和166促进可动元件142和靠近旋转轴144的下面的结构之间的蚀刻释放。
在图7-8的实施例中,电极136面向可动元件142的部件146,且电极138面向可动元件142的部件148。电极136和138的每个具有制作得尽可能大的外周界170。例如,电极136和138的每个的周界170大约等于其相应上面的部件146和148的外周界172。电极136和138的每个提供结合的功能。即,电极136和138的每个同时提供感测功能和激励功能。在示例性情形中,当将激励或反馈信号叠加到感测信号上时,电极元件136和138的单个集同时起感测和激励或反馈电极的作用,同时有效地利用可动元件66的表面区域的整体。该电极配置有效地改善感测和激励能力。
图9示出差动加速计60可以安装于其中的设备174。虽然示出的是将差动加速计60安装于其中的设备174,但设备174的另一实施例可以具有安装在其中的差动加速计134(图7)。设备174可以是许多设备中的任一种,诸如内部引导系统、车辆的安全气囊展开系统、各种设备的保护系统,以及许多其他的科学和工程学系统。设备174包括差动加速计60被合并于其中的加速计封装176。在该示例性情形中,加速计封装176与电路178通信,该电路178可以包括例如处理器、硬盘驱动,以及通过本领域技术人员已知的常规总线结构互联的其他组件。本领域技术人员将认识到,设备174可以包括为简便起见在此处未讨论的很多其他组件。而且,设备174不需要具有在此处描述的结构。
通常,电路178监视来自加速计封装176的信号。这些信号包括沿Z轴的加速度。加速计封装176的差动加速计60感测Z轴加速度(Az)180。依据本发明,由来自结合图4所讨论的电容器110和112的电容产生Z轴加速度180。如本领域技术人员所知,在输出到电路178之前,来自差动加速计50的电容信号被传送到输入/输出电路芯片182的感测电路通信,用于适当的处理。
加速计封装176进一步包括与电路178通信的激励电压输入端口184,用于施加数字输入电压信号186。电压信号186发信号到I/O电路芯片182的激励电路188以在激励电极78和/或80上提供激励电压(V+和V-)190。电路178可以另外与设备174的外部端口(未示出)通信,使得外部输入信号可以被传送至电路178。电路178上的处理器软件或硬件随后产生电压信号186,其被传递至输入端口184。
这里所描述的实施例由包括被制造为对称跷跷板结构的差动电容式传感器的设备组成。另一实施例包括制造本发明的微机电系统对称差动电容式传感器的方法。止动器从可动元件伸出,与跷跷板检测质量的几何居中的旋转轴距离相等,使得可动元件止动器在正负方向上均在相同的加速度幅值止动。因此,消除了由不对称削波引起的非零时间平均输出值。此外,在该可动检测质量的每个远侧的部分设置多个孔。旋转轴一侧上的孔与旋转轴另一侧上的孔具有不同的尺寸和/或数量,从而在检测质量的相对的两半之间产生质量不平衡。而且,在旋转轴的任一侧上的孔被放置为远离可动元件的旋转轴以产生可动元件的大的力臂。这使得该可动检测质量元件响应于Z轴的加速度而旋转。诸如金属的附加材料可以被设置在可动检测质量的重的一边以进一步增加其质量。该检测质量中的孔还在传感器制造期间促进牺牲氧化物蚀刻,并且当该可动检测质量枢转时,孔有效地减少空气阻尼。在远离跷跷板式检测质量结构的几何居中的旋转轴的相等距离处放置激励电极,使得可以靠近旋转轴集群相对大的传感器电极。在可动质量的孔下方的电极被形成为包括对应的“镜像”孔,使得该激励电极和可动检测质量之间的电容可以在重和轻的端部之间相匹配以提供相同的激励能力。感测电极和激励电极的配置允许可动元件的表面区域的整体得到有效利用,以提供改进的感测和激励能力。
虽然已经详细说明和描述了本发明的优选实施例,但在不脱离本发明的精神或所附的权利要求的范围的情况下,可以做出各种修改,这对本领域技术人员是很显然的。例如,在不需要激励的应用中,该激励电极可以用作感测电极。在此情况下,可以对应地增加电容输出量。
Claims (20)
1.一种设备,包括:
微机电系统(MEMS)传感器,所述传感器包括:
基底;
附连于所述基底的可动感测元件,所述元件适合相对于在所述可动感测元件的第一和第二端部之间基本上几何居中的旋转轴运动以形成在所述旋转轴和所述第一端部之间的第一部件以及在所述旋转轴和所述第二端部之间的第二部件,所述第一部件包括延伸贯通所述可动元件的第一孔以产生具有第一质量的所述第一部件,所述第二部件包括延伸贯通所述可动元件的第二孔以产生具有少于所述第一质量的第二质量的所述第二部件;以及
放置于所述基底上、面向所述可动元件的所述第一和第二部件的至少一个电极。
2.如权利要求1所述的设备,其中:
从所述旋转轴朝向所述第一端部设置所述第一孔;并且
从所述旋转轴朝向所述第二端部设置所述第二孔。
3.如权利要求1所述的设备,其中:
以第一配置将所述第一孔安排在所述第一部件中;并且
以第二配置将所述第二孔安排在所述第二部件中,所述第二配置不同于所述第一配置,并且所述第一和第二配置的每个描述所述第一孔和所述第二孔中的相应孔的尺寸和数量。
4.如权利要求3所述的设备,其中所述至少一个电极包括:
面向所述第一部件的第一电极,所述第一电极具有以所述第二配置安排并且与所述第一孔相对的第三孔;以及
面向所述第二远侧区域的第二电极,所述第二电极具有以所述第一配置安排并且与所述第二孔相对的第四孔。
5.如权利要求3所述的设备,进一步包括:
延伸贯通所述第一部件的第三孔,所述第三孔以第三配置安排;以及
延伸贯通所述第二部件的第四孔,所述第四孔以所述第三配置安排,并且所述第三和第四孔相对于所述旋转轴基本对称地置于所述可动元件上。
6.如权利要求1所述的设备,其中:
所述第一部件包括位置邻近所述旋转轴的第一近侧区域,和位置邻近所述第一端部的第一远侧区域;
所述第二部件包括位置邻近所述旋转轴的第二近侧区域,和位置邻近所述第二端部的第二远侧区域;以及
所述至少一个电极包括面向所述第一近侧区域的第一感测电极和面向所述第二近侧区域的第二感测电极,所述第一和第二感测电极被相对于所述旋转轴基本对称地安排。
7.如权利要求6所述的设备,其中所述至少一个电极进一步包括:
面向所述第一远侧区域的第一激励电极;和
面向所述第二远侧区域的第二激励电极,所述第一和第二激励电极被相对于所述旋转轴基本对称地安排。
8.如权利要求1所述的设备,其中所述至少一个电极包括:
面向所述第一部件并具有与所述第一部件的部件周界大约相等的周界的第一电极;以及
面向所述第二部件并具有与所述第二部件的所述部件周界大约相等的所述周界的第二电极。
9.如权利要求8所述的设备,其中:
所述第一电极包括与所述第一部件中的所述第一孔相对的第三孔;以及
所述第二电极包括与所述第二部件中的所述第二孔相对的第四孔。
10.如权利要求1所述的设备,进一步包括布置于所述检测质量的所述第一部件上的材料,所述材料使所述第一部件的所述第一质量相对于所述第二质量增加。
11.如权利要求1所述的设备,其中所述传感器进一步包括:
接近所述第一端部从所述可动元件的表面延伸的第一止动器,所述表面面向所述基底;以及
接近所述第二端部从所述可动元件的所述表面延伸的第二止动器,距离所述旋转轴基本上等距离地设置所述第一和第二止动器的每个。
12.如权利要求11所述的设备,其中所述基底包括:
面向所述可动感测元件的第一接触板,所述第一止动器选择性地与所述第一接触板接触;以及
面向所述可动感测元件的第二接触板,所述第二止动器选择性地与所述第二接触板接触,并且所述第一和第二止动器在与所述第一和第二接触板基本上相同的电位上。
13.一种制造微机电系统(MEMS)传感器的方法,包括:
提供基底;
在所述基底上形成静态导电层以包括第一电极和第二电极,所述第一电极与所述第二电极电隔离;
在所述第一导电层上形成牺牲层;
在所述第一牺牲层上形成可动元件,所述可动元件适于相对于在所述可动元件的第一和第二端部之间几何居中的旋转轴运动,以形成在所述旋转轴和所述第一端部之间的第一部件和在所述旋转轴和所述第二端部之间的第二部件;
形成延伸贯通所述可动元件的所述第一部件的第一孔以产生具有第一质量的所述第一部件;
形成延伸贯通所述可动元件的所述第二部件的第二孔以产生具有第二质量的所述第二部件,所述第二质量小于所述第一质量;和
选择性地移除所述牺牲层使得所述导电层与所述可动元件隔开,且将所述导电层形成为使得所述第一电极面向所述第一孔且第二电极面向所述第二孔。
14.如权利要求13所述的方法,进一步包括:
跨越所述第一部件的第一远侧区域以第一配置安排所述第一孔,所述第一远侧区域被置于邻近于所述第一端部;以及
跨越所述第二部件的第二远侧区域以第二配置安排所述第二孔,所述第二远侧区域被置于邻近于所述第二端部,所述第二配置不同于所述第一配置,且所述第一和第二配置的每个描述所述第一孔和所述第二孔的相应孔的尺寸和数量。
15.如权利要求14所述的方法,其中:
所述形成所述第一电极包括将所述第一电极放置为面对所述第一远侧区域,并形成以所述第二配置安排的所述第一电极中的第三孔;以及
所述形成所述第二电极包括将所述第二电极放置为面对所述第二远侧区域,并形成以所述第一配置安排的所述第一电极中的第四孔。
16.如权利要求13所述的方法,进一步包括:
跨越所述第一部件的第一近侧区域以第三配置形成第三孔,所述第一近侧区域被置于邻近于所述旋转轴;以及
跨越所述第二部件的第二近侧区域以所述第三配置形成第四孔,所述第二近侧区域被置于邻近于所述旋转轴,并且相对于所述旋转轴以所述第三配置跨越所述第一和第二近侧区域的相应近侧区域基本对称地分布所述第三和第四孔。
17.一种微机电系统(MEMS)传感器,包括:
基底;
附连于所述基底的可动感测元件,所述元件适合相对于在所述可动感测元件的第一和第二端部之间基本上几何居中的旋转轴运动以形成在所述旋转轴和所述第一端部之间的第一部件以及在所述旋转轴和所述第二端部之间的第二部件,所述第一部件包括延伸贯通所述可动元件的第一孔以产生具有第一质量的所述第一部件,所述第二部件包括延伸贯通所述可动元件的第二孔以产生具有少于所述第一质量的第二质量的所述第二部件,以第一配置将所述第一孔安排在所述第一部件中,以第二配置将所述第二孔安排在所述第二部件中,所述第二配置不同于所述第一配置,且所述第一和第二配置的每个描述所述第一孔和所述第二孔的相应孔的尺寸和数量;
接近所述第一端部从所述可动元件的所述表面延伸的第一止动器;
接近所述第二端部从所述可动元件的所述表面延伸的第二止动器,距离所述旋转轴基本上等距离地设置所述第一和第二止动器的每个;以及
放置于所述基底上、面向所述可动元件的所述第一和第二部件的至少一个电极。
18.如权利要求17所述的传感器,其中所述至少一个电极包括:
面向所述第一部件的第一电极,所述第一电极具有以所述第二配置安排并且与所述第一孔相对的第三孔;和
面向所述第二远侧区域的第二电极,所述第二电极具有以所述第一配置安排并且与所述第二孔相对的第四孔。
19.如权利要求17所述的设备,其中:
所述第一部件包括位置邻近所述旋转轴的第一近侧区域和位置邻近所述第一端部的第一远侧区域;
所述第二部件包括位置邻近所述旋转轴的第二近侧区域和位置邻近所述第二端部的第二远侧区域;
面向所述第一近侧区域的第一感测电极;
面向所述第二近侧区域的第二感测电极,所述第一和第二感测电极相对于所述旋转轴基本对称地安排;
面向所述第一远侧区域的第一激励电极;以及
面向所述第二远侧区域的第二激励电极,所述第一和第二激励电极相对于所述旋转轴基本对称地安排。
20.如权利要求17所述的设备,其中所述至少一个电极包括:
面向所述第一部件并具有与所述第一部件的部件周界大约相等的周界的第一电极,所述第一电极包括与所述第一部件中的所述第一孔相对的第三孔;以及
面向所述第二部件并具有与所述第二部件的所述部件周界大约相等的所述周界的第二电极,所述第二电极包括与所述第二部件中的所述第二孔相对的第四孔。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/833,476 US7578190B2 (en) | 2007-08-03 | 2007-08-03 | Symmetrical differential capacitive sensor and method of making same |
| US11/833,476 | 2007-08-03 | ||
| PCT/US2008/068080 WO2009020716A1 (en) | 2007-08-03 | 2008-06-25 | Symmetrical differential capacitive sensor and method of making same |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN101772705A true CN101772705A (zh) | 2010-07-07 |
Family
ID=40336873
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200880101859A Pending CN101772705A (zh) | 2007-08-03 | 2008-06-25 | 对称差动电容式传感器及其制造方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7578190B2 (zh) |
| JP (1) | JP5557336B2 (zh) |
| CN (1) | CN101772705A (zh) |
| TW (1) | TWI439693B (zh) |
| WO (1) | WO2009020716A1 (zh) |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102645550A (zh) * | 2011-02-18 | 2012-08-22 | 精工爱普生株式会社 | 物理量传感器及电子设备 |
| CN102667496A (zh) * | 2009-11-24 | 2012-09-12 | 松下电器产业株式会社 | 加速度传感器 |
| CN103226153A (zh) * | 2012-01-30 | 2013-07-31 | 精工爱普生株式会社 | 物理量传感器以及电子设备 |
| CN103364591A (zh) * | 2012-04-09 | 2013-10-23 | 精工爱普生株式会社 | 物理量传感器以及电子设备 |
| CN103364592A (zh) * | 2012-04-10 | 2013-10-23 | 精工爱普生株式会社 | 物理量传感器及其制造方法、以及电子设备 |
| CN103364589A (zh) * | 2012-04-06 | 2013-10-23 | 精工爱普生株式会社 | 物理量传感器和电子设备 |
| CN104297524A (zh) * | 2013-07-17 | 2015-01-21 | 精工爱普生株式会社 | 功能元件、电子设备、以及移动体 |
| CN104345167A (zh) * | 2013-07-31 | 2015-02-11 | 霍尼韦尔国际公司 | 稳健操作通过严重冲击和加速的mems装置机构增强 |
| CN104407172A (zh) * | 2014-12-11 | 2015-03-11 | 歌尔声学股份有限公司 | 一种新型的加速度计的z轴结构 |
| CN104515870A (zh) * | 2013-10-03 | 2015-04-15 | 精工爱普生株式会社 | 物理量检测元件、以及物理量检测装置、电子设备、移动体 |
| CN104849493A (zh) * | 2014-02-17 | 2015-08-19 | 罗伯特·博世有限公司 | 用于微机械z传感器的摆杆装置 |
| CN105712292A (zh) * | 2014-12-22 | 2016-06-29 | 德尔福芒斯公司 | 具有可移动厚隔膜的微机电系统结构 |
| CN103364591B (zh) * | 2012-04-09 | 2018-08-31 | 精工爱普生株式会社 | 物理量传感器以及电子设备 |
Families Citing this family (71)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006048381A1 (de) * | 2006-10-12 | 2008-04-17 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Sensor zur Erfassung von Beschleunigungen |
| DE102006058747A1 (de) * | 2006-12-12 | 2008-06-19 | Robert Bosch Gmbh | Mikromechanischer z-Sensor |
| US20110113880A1 (en) * | 2008-05-15 | 2011-05-19 | Continental Teves Ag & Co. Ohg | Micromechanical acceleration sensor |
| US8371167B2 (en) * | 2008-07-29 | 2013-02-12 | Pixart Imaging Inc. | In-plane sensor, out-of-plane sensor, and method for making same |
| US8171793B2 (en) * | 2008-07-31 | 2012-05-08 | Honeywell International Inc. | Systems and methods for detecting out-of-plane linear acceleration with a closed loop linear drive accelerometer |
| US8020443B2 (en) * | 2008-10-30 | 2011-09-20 | Freescale Semiconductor, Inc. | Transducer with decoupled sensing in mutually orthogonal directions |
| DE102008043788A1 (de) * | 2008-11-17 | 2010-05-20 | Robert Bosch Gmbh | Mikromechanisches Bauelement |
| CA2658141C (en) * | 2009-03-06 | 2014-07-22 | Nanometrics Inc. | Capacitive displacement transducer for a weak-motion inertial sensor |
| DE102009029095B4 (de) * | 2009-09-02 | 2017-05-18 | Robert Bosch Gmbh | Mikromechanisches Bauelement |
| DE102009029248B4 (de) * | 2009-09-08 | 2022-12-15 | Robert Bosch Gmbh | Mikromechanisches System zum Erfassen einer Beschleunigung |
| US8322216B2 (en) * | 2009-09-22 | 2012-12-04 | Duli Yu | Micromachined accelerometer with monolithic electrodes and method of making the same |
| JP2011112389A (ja) * | 2009-11-24 | 2011-06-09 | Panasonic Electric Works Co Ltd | 加速度センサ |
| JP5716149B2 (ja) * | 2009-11-24 | 2015-05-13 | パナソニックIpマネジメント株式会社 | 加速度センサ |
| CN102667497B (zh) * | 2009-11-24 | 2014-06-18 | 松下电器产业株式会社 | 加速度传感器 |
| JP2011112392A (ja) * | 2009-11-24 | 2011-06-09 | Panasonic Electric Works Co Ltd | 加速度センサ |
| JP2011112390A (ja) * | 2009-11-24 | 2011-06-09 | Panasonic Electric Works Co Ltd | 加速度センサ |
| US8505380B2 (en) * | 2010-02-19 | 2013-08-13 | Honeywell International Inc. | Out-of plane comb-drive accelerometer |
| US8624759B2 (en) | 2010-05-19 | 2014-01-07 | Nokia Corporation | Apparatus and method for an actuator in an electronic device |
| US20110285662A1 (en) * | 2010-05-19 | 2011-11-24 | Nokia Corporation | Apparatus and method for an actuator in an electronic device |
| JP5527019B2 (ja) * | 2010-05-28 | 2014-06-18 | セイコーエプソン株式会社 | 物理量センサーおよび電子機器 |
| IT1401001B1 (it) * | 2010-06-15 | 2013-07-05 | Milano Politecnico | Accelerometro capacitivo triassiale microelettromeccanico |
| US10207719B2 (en) | 2010-07-19 | 2019-02-19 | Nxp Usa, Inc. | Use of multiple internal sensors for measurements validation |
| US8688393B2 (en) | 2010-07-29 | 2014-04-01 | Medtronic, Inc. | Techniques for approximating a difference between two capacitances |
| JP2012088120A (ja) * | 2010-10-18 | 2012-05-10 | Seiko Epson Corp | 物理量センサー素子、物理量センサーおよび電子機器 |
| US8839670B2 (en) * | 2010-11-24 | 2014-09-23 | Invensense, Inc. | Anchor-tilt cancelling accelerometer |
| JP2012163507A (ja) * | 2011-02-09 | 2012-08-30 | Mitsubishi Electric Corp | 加速度センサ |
| US8927311B2 (en) | 2011-02-16 | 2015-01-06 | Freescale Semiconductor, Inc. | MEMS device having variable gap width and method of manufacture |
| US8596123B2 (en) * | 2011-05-05 | 2013-12-03 | Freescale Semiconductor, Inc. | MEMS device with impacting structure for enhanced resistance to stiction |
| DE102011076551B4 (de) * | 2011-05-26 | 2024-02-22 | Robert Bosch Gmbh | Inertialsensor |
| US9069005B2 (en) * | 2011-06-17 | 2015-06-30 | Avago Technologies General Ip (Singapore) Pte. Ltd. | Capacitance detector for accelerometer and gyroscope and accelerometer and gyroscope with capacitance detector |
| US8960003B2 (en) * | 2011-09-16 | 2015-02-24 | Taiwan Semiconductor Manufacturing Company, Ltd. | Motion sensor device and methods for forming the same |
| DE102011057110A1 (de) | 2011-12-28 | 2013-07-04 | Maxim Integrated Products, Inc. | MEMS-Beschleunigungssensor |
| US8933712B2 (en) | 2012-01-31 | 2015-01-13 | Medtronic, Inc. | Servo techniques for approximation of differential capacitance of a sensor |
| US8925384B2 (en) * | 2012-05-29 | 2015-01-06 | Freescale Semiconductor, Inc. | MEMS sensor with stress isolation and method of fabrication |
| CN104684841A (zh) * | 2012-06-13 | 2015-06-03 | 普渡研究基金会 | 微电子机械系统和使用方法 |
| JP6002481B2 (ja) | 2012-07-06 | 2016-10-05 | 日立オートモティブシステムズ株式会社 | 慣性センサ |
| US9134337B2 (en) * | 2012-12-17 | 2015-09-15 | Maxim Integrated Products, Inc. | Microelectromechanical z-axis out-of-plane stopper |
| US9249008B2 (en) * | 2012-12-20 | 2016-02-02 | Industrial Technology Research Institute | MEMS device with multiple electrodes and fabricating method thereof |
| US9470709B2 (en) | 2013-01-28 | 2016-10-18 | Analog Devices, Inc. | Teeter totter accelerometer with unbalanced mass |
| JP6142554B2 (ja) * | 2013-02-01 | 2017-06-07 | 株式会社村田製作所 | 静電容量型センサ |
| US9190937B2 (en) * | 2013-02-06 | 2015-11-17 | Freescale Semiconductor, Inc. | Stiction resistant mems device and method of operation |
| US9297825B2 (en) * | 2013-03-05 | 2016-03-29 | Analog Devices, Inc. | Tilt mode accelerometer with improved offset and noise performance |
| US9383384B2 (en) * | 2013-05-31 | 2016-07-05 | Honeywell International Inc. | Extended-range closed-loop accelerometer |
| JP6150056B2 (ja) | 2013-07-24 | 2017-06-21 | セイコーエプソン株式会社 | 機能素子、電子機器、および移動体 |
| US9242851B2 (en) | 2013-08-06 | 2016-01-26 | Freescale Semiconductor, Inc | MEMS device with differential vertical sense electrodes |
| JP6080752B2 (ja) * | 2013-12-12 | 2017-02-15 | 三菱電機株式会社 | 加速度センサ |
| US8893563B1 (en) * | 2014-01-15 | 2014-11-25 | King Fahd University Of Petroleum And Minerals | Differential capacitance torque sensor |
| US9296606B2 (en) * | 2014-02-04 | 2016-03-29 | Invensense, Inc. | MEMS device with a stress-isolation structure |
| JP6655281B2 (ja) * | 2014-08-19 | 2020-02-26 | セイコーエプソン株式会社 | 物理量センサー、電子機器および移動体 |
| US10073113B2 (en) | 2014-12-22 | 2018-09-11 | Analog Devices, Inc. | Silicon-based MEMS devices including wells embedded with high density metal |
| US9840409B2 (en) * | 2015-01-28 | 2017-12-12 | Invensense, Inc. | Translating Z axis accelerometer |
| US20160371664A1 (en) * | 2015-06-19 | 2016-12-22 | Ncr Corporation | Slotted rotatable drum and method of using same |
| US10078098B2 (en) | 2015-06-23 | 2018-09-18 | Analog Devices, Inc. | Z axis accelerometer design with offset compensation |
| CN104897334B (zh) * | 2015-06-29 | 2017-07-21 | 歌尔股份有限公司 | 一种mems压力传感元件 |
| US20170023606A1 (en) * | 2015-07-23 | 2017-01-26 | Freescale Semiconductor, Inc. | Mems device with flexible travel stops and method of fabrication |
| FI127042B (en) * | 2015-09-09 | 2017-10-13 | Murata Manufacturing Co | Electrode of a microelectromechanical device |
| JP6401868B2 (ja) * | 2015-09-15 | 2018-10-10 | 株式会社日立製作所 | 加速度センサ |
| JP6437429B2 (ja) * | 2015-12-25 | 2018-12-12 | 株式会社日立製作所 | 加速度センサ、受振器および地震探査システム |
| ITUA20162173A1 (it) | 2016-03-31 | 2017-10-01 | St Microelectronics Srl | Sensore accelerometrico mems avente elevata accuratezza e ridotta sensibilita' nei confronti della temperatura e dell'invecchiamento |
| US11268976B2 (en) * | 2017-02-23 | 2022-03-08 | Invensense, Inc. | Electrode layer partitioning |
| JP6691882B2 (ja) * | 2017-03-03 | 2020-05-13 | 株式会社日立製作所 | 加速度センサ |
| GB2566100A (en) * | 2017-09-05 | 2019-03-06 | Cirrus Logic Int Semiconductor Ltd | MEMS devices and processes |
| JP2020030067A (ja) * | 2018-08-21 | 2020-02-27 | セイコーエプソン株式会社 | 物理量センサー、センサーデバイス、電子機器、および移動体 |
| CN111273057A (zh) * | 2018-12-05 | 2020-06-12 | 苏州明皜传感科技有限公司 | 三轴加速度计 |
| IT201900000190A1 (it) * | 2019-01-08 | 2020-07-08 | St Microelectronics Srl | Dispositivo mems con geometria ottimizzata per la riduzione dell'offset dovuto all'effetto radiometrico |
| EP3792637B1 (en) * | 2019-09-11 | 2023-05-03 | Murata Manufacturing Co., Ltd. | Low-noise multi-axis mems accelerometer |
| EP3839519B1 (en) * | 2019-12-18 | 2023-11-08 | Murata Manufacturing Co., Ltd. | Microelectromechanical device with stopper |
| US11499987B2 (en) * | 2020-06-17 | 2022-11-15 | Nxp Usa, Inc. | Z-axis inertial sensor with extended motion stops |
| FR3114583B1 (fr) * | 2020-09-29 | 2022-09-16 | Commissariat Energie Atomique | Procédé de fabrication d’un transducteur électroacoustique |
| JP2022175616A (ja) * | 2021-05-14 | 2022-11-25 | セイコーエプソン株式会社 | 慣性センサー及び慣性計測装置 |
| CN113702665B (zh) * | 2021-10-27 | 2022-02-11 | 杭州麦新敏微科技有限责任公司 | 一种mems加速度计及其形成方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2617607B1 (fr) * | 1987-06-30 | 1989-12-01 | Applic Gles Electrici Meca | Accelerometre pendulaire a reequilibrage et procede de fabrication d'un tel accelerometre |
| US5195371A (en) * | 1988-01-13 | 1993-03-23 | The Charles Stark Draper Laboratory, Inc. | Semiconductor chip transducer |
| US5404749A (en) * | 1993-04-07 | 1995-04-11 | Ford Motor Company | Boron doped silicon accelerometer sense element |
| US6428713B1 (en) | 1999-10-01 | 2002-08-06 | Delphi Technologies, Inc. | MEMS sensor structure and microfabrication process therefor |
| US6230566B1 (en) | 1999-10-01 | 2001-05-15 | The Regents Of The University Of California | Micromachined low frequency rocking accelerometer with capacitive pickoff |
| US6571628B1 (en) | 2000-10-16 | 2003-06-03 | Institute Of Microelectronics | Z-axis accelerometer |
| DE60232250D1 (de) | 2001-08-20 | 2009-06-18 | Honeywell Int Inc | Bogenförmige federelemente für mikro-elektromechanischen beschleunigungssensor |
| US6955086B2 (en) * | 2001-11-19 | 2005-10-18 | Mitsubishi Denki Kabushiki Kaisha | Acceleration sensor |
| US6666092B2 (en) | 2002-02-28 | 2003-12-23 | Delphi Technologies, Inc. | Angular accelerometer having balanced inertia mass |
| US7005193B2 (en) | 2003-04-29 | 2006-02-28 | Motorola, Inc. | Method of adding mass to MEMS structures |
| JP2005069852A (ja) * | 2003-08-25 | 2005-03-17 | Seiko Instruments Inc | 容量型力学量センサ |
| US7059190B2 (en) * | 2003-10-08 | 2006-06-13 | Denso Corporation | Semiconductor dynamic sensor having variable capacitor formed on laminated substrate |
| US6935175B2 (en) * | 2003-11-20 | 2005-08-30 | Honeywell International, Inc. | Capacitive pick-off and electrostatic rebalance accelerometer having equalized gas damping |
| US7140250B2 (en) * | 2005-02-18 | 2006-11-28 | Honeywell International Inc. | MEMS teeter-totter accelerometer having reduced non-linearty |
| FI119299B (fi) * | 2005-06-17 | 2008-09-30 | Vti Technologies Oy | Menetelmä kapasitiivisen kiihtyvyysanturin valmistamiseksi ja kapasitiivinen kiihtyvyysanturi |
| DE102006022811A1 (de) * | 2006-05-16 | 2007-11-22 | Robert Bosch Gmbh | Beschleunigungssensor |
-
2007
- 2007-08-03 US US11/833,476 patent/US7578190B2/en active Active
-
2008
- 2008-06-25 CN CN200880101859A patent/CN101772705A/zh active Pending
- 2008-06-25 JP JP2010520025A patent/JP5557336B2/ja not_active Expired - Fee Related
- 2008-06-25 WO PCT/US2008/068080 patent/WO2009020716A1/en active Application Filing
- 2008-07-10 TW TW097126122A patent/TWI439693B/zh not_active IP Right Cessation
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9052334B2 (en) | 2009-11-24 | 2015-06-09 | Panasonic Intellectual Property Management Co., Ltd. | Acceleration sensor |
| CN102667496A (zh) * | 2009-11-24 | 2012-09-12 | 松下电器产业株式会社 | 加速度传感器 |
| CN102645550A (zh) * | 2011-02-18 | 2012-08-22 | 精工爱普生株式会社 | 物理量传感器及电子设备 |
| CN102645550B (zh) * | 2011-02-18 | 2016-04-13 | 精工爱普生株式会社 | 物理量传感器及电子设备 |
| CN103226153A (zh) * | 2012-01-30 | 2013-07-31 | 精工爱普生株式会社 | 物理量传感器以及电子设备 |
| CN103364589A (zh) * | 2012-04-06 | 2013-10-23 | 精工爱普生株式会社 | 物理量传感器和电子设备 |
| CN103364589B (zh) * | 2012-04-06 | 2017-07-18 | 精工爱普生株式会社 | 物理量传感器和电子设备 |
| CN103364591A (zh) * | 2012-04-09 | 2013-10-23 | 精工爱普生株式会社 | 物理量传感器以及电子设备 |
| CN103364591B (zh) * | 2012-04-09 | 2018-08-31 | 精工爱普生株式会社 | 物理量传感器以及电子设备 |
| CN103364592A (zh) * | 2012-04-10 | 2013-10-23 | 精工爱普生株式会社 | 物理量传感器及其制造方法、以及电子设备 |
| CN103364592B (zh) * | 2012-04-10 | 2018-09-14 | 精工爱普生株式会社 | 物理量传感器及其制造方法、以及电子设备 |
| CN104297524A (zh) * | 2013-07-17 | 2015-01-21 | 精工爱普生株式会社 | 功能元件、电子设备、以及移动体 |
| CN104297524B (zh) * | 2013-07-17 | 2019-10-29 | 精工爱普生株式会社 | 功能元件、电子设备、以及移动体 |
| CN104345167A (zh) * | 2013-07-31 | 2015-02-11 | 霍尼韦尔国际公司 | 稳健操作通过严重冲击和加速的mems装置机构增强 |
| CN104515870A (zh) * | 2013-10-03 | 2015-04-15 | 精工爱普生株式会社 | 物理量检测元件、以及物理量检测装置、电子设备、移动体 |
| CN104849493A (zh) * | 2014-02-17 | 2015-08-19 | 罗伯特·博世有限公司 | 用于微机械z传感器的摆杆装置 |
| CN104407172A (zh) * | 2014-12-11 | 2015-03-11 | 歌尔声学股份有限公司 | 一种新型的加速度计的z轴结构 |
| CN105712292A (zh) * | 2014-12-22 | 2016-06-29 | 德尔福芒斯公司 | 具有可移动厚隔膜的微机电系统结构 |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI439693B (zh) | 2014-06-01 |
| JP2010536036A (ja) | 2010-11-25 |
| US7578190B2 (en) | 2009-08-25 |
| WO2009020716A1 (en) | 2009-02-12 |
| US20090031809A1 (en) | 2009-02-05 |
| TW200912318A (en) | 2009-03-16 |
| JP5557336B2 (ja) | 2014-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101772705A (zh) | 对称差动电容式传感器及其制造方法 | |
| EP2106553B1 (en) | Differential capacitive sensor and method of making same | |
| US7121141B2 (en) | Z-axis accelerometer with at least two gap sizes and travel stops disposed outside an active capacitor area | |
| RU2325722C2 (ru) | Миниатюрное реле и соответствующие варианты его использования | |
| CN102046514B (zh) | 具有微型机电系统传感器的设备及其制造方法 | |
| US6230566B1 (en) | Micromachined low frequency rocking accelerometer with capacitive pickoff | |
| US6935175B2 (en) | Capacitive pick-off and electrostatic rebalance accelerometer having equalized gas damping | |
| US20100212425A1 (en) | 3-Axis Accelerometer With Gap-Closing Capacitive Electrodes | |
| EP1702884B1 (en) | Method of making a microsensor | |
| EP0527342B1 (en) | Differential capacitor structure and fabricating method | |
| US9128114B2 (en) | Capacitive sensor device and a method of sensing accelerations | |
| JP5352865B2 (ja) | 加速度センサ | |
| Jayanetti et al. | Design and simulation of a MEMS based dual axis capacitive accelerometer | |
| KR101064285B1 (ko) | 일축 가속도 측정 소자 및 이를 이용한 가속도 측정 센서 | |
| KR20010050348A (ko) | 미크로 기계가공되는 구조물 및 그 제조방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C12 | Rejection of a patent application after its publication | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20100707 |