JP5527019B2 - 物理量センサーおよび電子機器 - Google Patents
物理量センサーおよび電子機器 Download PDFInfo
- Publication number
- JP5527019B2 JP5527019B2 JP2010122959A JP2010122959A JP5527019B2 JP 5527019 B2 JP5527019 B2 JP 5527019B2 JP 2010122959 A JP2010122959 A JP 2010122959A JP 2010122959 A JP2010122959 A JP 2010122959A JP 5527019 B2 JP5527019 B2 JP 5527019B2
- Authority
- JP
- Japan
- Prior art keywords
- region
- physical quantity
- quantity sensor
- oscillator
- acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/0802—Details
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B81—MICROSTRUCTURAL TECHNOLOGY
- B81B—MICROSTRUCTURAL DEVICES OR SYSTEMS, e.g. MICROMECHANICAL DEVICES
- B81B7/00—Microstructural systems; Auxiliary parts of microstructural devices or systems
- B81B7/02—Microstructural systems; Auxiliary parts of microstructural devices or systems containing distinct electrical or optical devices of particular relevance for their function, e.g. microelectro-mechanical systems [MEMS]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/18—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration in two or more dimensions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P2015/0805—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration
- G01P2015/0822—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass
- G01P2015/0825—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass for one single degree of freedom of movement of the mass
- G01P2015/0831—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values being provided with a particular type of spring-mass-system for defining the displacement of a seismic mass due to an external acceleration for defining out-of-plane movement of the mass for one single degree of freedom of movement of the mass the mass being of the paddle type having the pivot axis between the longitudinal ends of the mass, e.g. see-saw configuration
Description
図1(A)〜図1(F)は、物理量センサーの構造と動作の一例を示す図である。物理量センサーは慣性センサーとして使用することができ、具体的には、例えば、鉛直方向(水平面に垂直な方向)の加速度(例えば重力加速度)を測定するための加速度センサー(静電容量型加速度センサー、静電容量型MEMS加速度センサー)として利用可能である。
図1(A)に示されるように、物理量センサー(ここでは、静電容量型加速度センサーであるとする)は、支持体100および蓋体200によって構成される封止体250と、封止体250の内部の空間に設けられる揺動体300と、揺動体300を、支持軸Q1を支点としてシーソー揺動可能に両持ち支持する第1支持部40a(図1(A)では不図示、図1(B),図1(C)参照)および第2支持部40bと、揺動体300のシーソー揺動に応じて位置が変化する可動電極(第1可動電極109a,第2可動電極109b)ならびに、ベース102上の、可動電極に対向する位置に設けられる固定電極(第1固定電極208a,第2固定電極208b)を有する可変容量(第1可変容量c1,第2可変容量c2)と、を含む。
図2(A),図2(B)は、封止体の構造の一例を示す図である。図2(A)は封止体の全体構成を示す斜視図であり、図2(B)は、ベースと蓋体との接続部の断面構造の一例を示す図である。
図3(A)〜図3(D)は、封止体の製造方法の一例を示す図である。この例では、2枚のSOI基板を貼り合わせて封止体を製造する。
本実施形態では、検出回路の構成例について説明する。図4(A)〜図4(C)は、検出回路の構成例を示す図である。検出回路13は、先に図2(A)を用いて説明したように、例えば支持体100上の空きスペースに設けられ、かつ、信号処理回路10を内蔵する。図4(A)の例では、物理量センサー(ここでは静電容量型加速度センサーとする)に含まれる第1可変容量c1,第2可変容量c2は、共通の接地電極である固定電極208と、第1可動電極109aおよび第2可動電極109bと、を有している。
ここで、図5(A)〜図5(C)を用いて、C/V変換回路(C/V変換アンプ)の構成と動作の一例について説明する。図5(A)〜図5(C)は、C/V変換回路の構成と動作について説明するための図である。
本実施形態では、2つの異なる方向の加速度を検出することができる静電容量型センサーの一例について説明する。以下の説明では、静電容量型加速度センサーについて説明する。
本実施形態では、第1方向(X軸方向)、第2方向(Y軸方向)および第3方向(Z軸方向)の各々の容量値の変化を検出することができる、3軸感度をもつ物理量センサーについて説明する。図8は、第1方向(X軸方向)、第2方向(Y軸方向)および第3方向(Z軸方向)の各々の容量値の変化を検出することができる、3軸感度をもつ物理量センサーの構成例を示す平面図である。図8において、前掲の実施形態と共通する要素には同じ参照符号を付している。以下の説明では、加速度センサーを例にとって説明する。
本実施形態では、2つの異なる方向の加速度を検出することができる静電容量型加速度センサーの他の例について説明する。以下の説明では、静電容量型加速度センサーについて説明する。
図10は、図6および図7に示される構造の揺動体を2個使用して、異なる3つの方向の加速度を検出可能とした物理量加速度センサーの構成を示す平面図である。図10の例では、共通の支持体100に、揺動体300と、揺動体300’とが設けられる。揺動体300および揺動体300’の構成は、図6および図7に示される揺動体300の構成と同じである。なお、揺動体300’の構成要素の参照符号には、ダッシュ記号が付されている。
本実施形態では、シーソー構造を利用した物理量センサーの検出精度を、より向上させるための信号処理方法と、その信号処理方法を利用した物理量センサーの構成について説明する。
図13は、物理量加速度センサーの他の例(図12の構成に、さらに、第1方向(X軸方向)の加速度を検出するための構成を追加した例)を示す平面図である。図13の例では、図12の構成に加えて、第1方向(X軸方向)の加速度を検出するための静電容量型物理量センサー370が追加されている。この物理量加速度センサー370は、第1方向(X軸方向)の加速度を検出するための機能のみを有し、シーソー揺動による第3方向(Z軸方向)の加速度を検出する機能は有していない(一対の揺動体300a,300bを用いて、高精度に第3方向の加速度を検出することができるため、それ以上、揺動体を設ける必要がないからである)。
以上の実施形態においては、揺動体の支持部を揺動体の中心を通る線と平行な位置にずらすことにより揺動体をシーソー揺動可能にしたが、これに限らず、種々、変形や応用が可能である。
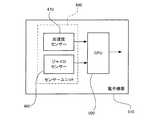
図16は、電子機器の構成の一例を示す図である。図16の電子機器には、上記いずれかの実施形態にかかる物理量センサー(例えば静電容量型物理量加速度センサー等)が含まれる。電子機器は、例えば、ゲームコントローラやモーションセンサー等である。
40b 第2支持部(第2トーションバネ)、90 封止材、95 空隙、
97,99 開口部、100 支持体(例えばSOI基板)、
102 ベース(シリコン板等)、104 絶縁層、
106 基板(例えばSOI基板の活性層)、
109a 第1可動電極、109b 第2可動電極、200 蓋体、
208a 第1固定電極、208b 第2固定電極、250 封止体(気密封止体)、
300(300a,300b) 揺動体、
311 シリコンをパターニングして形成されるシーソープレート、
900 質量部(部分的な錘)、Q1,Q2 支持軸(第1軸,第2軸)、
GL 重力線、SL 重力線をd1だけ平行にシフトさせた線分、
QL 揺動体の中心線、G1 揺動体の重心、
PT1 第1シーソー片(第1の領域)、PT2 第2シーソー片(第2の領域)、
PT1a 第1シーソー片(第1の領域)、PT2a 第2シーソー片(第2の領域)、
PT1b 第3シーソー片(第3の領域)、PT2b 第4シーソー片(第4の領域)、
c1 第1可変容量、c2 第2可変容量
Claims (11)
- 第1揺動体および第2揺動体を備え、
前記第1揺動体は、第1軸に配置された第1支持部と第2支持部とによって支持され、且つ、平面視で前記第1軸によって第1の領域と第2の領域とに区画した場合に各々の領域には第1可動電極が設けられ、
前記第2揺動体は、前記第1軸と並行する第2軸に配置された第3支持部と第4支持部とによって支持され、且つ、平面視で前記第2軸によって第3の領域と第4の領域とに区画した場合に各々の領域には第2可動電極が設けられ、
前記第1可動電極および前記第2可動電極の各々に対向して固定電極が設けられ、
前記第2の領域の質量は前記第1の領域の質量よりも重く、前記第3の領域の質量は前記第4の領域よりも重く、
前記第1揺動体の前記第1の領域から前記第2の領域への並びの方向と、前記第2揺動体の前記第3の領域から前記第4の領域への並びの方向と、は同じであり、
検出信号に基づいて信号処理を実行する信号処理回路、を備え、
前記検出信号は、前記第1の領域の前記第1可動電極と前記固定電極との間で生じる第1検出信号と、前記第2の領域の前記第1可動電極と前記固定電極との間で生じる第2検出信号と、前記第3の領域の前記第2可動電極と前記固定電極との間で生じる第3検出信号と、前記第4の領域の前記第2可動電極と前記固定電極との間で生じる第4検出信号とを含み、
前記信号処理回路は、
前記第1検出信号と前記第2検出信号との差を示す第1差動信号を生成し、
前記第3検出信号と前記第4検出信号との差を示す第2差動信号を生成し、
前記第1差動信号と前記第2差動信号を加算して得られる信号に基づいて加速度検出信号を生成することを特徴とする物理量センサー。 - 請求項1に記載の物理量センサーであって、
前記加速度検出信号は、前記第1軸に交差する方向に発生する加速度成分と、前記第2軸に交差する方向に発生する加速度成分と、が互いに相殺されていることを特徴とする物理量センサー。 - 請求項1または2に記載の物理量センサーであって、
前記第1軸および前記第2軸の少なくとも一方は、前記第1揺動体または前記第2揺動体の中心を通る線と平行であることを特徴とする物理量センサー。 - 請求項1ないし3のいずれか一項に記載の物理量センサーであって、
前記第1の領域および前記第2の領域の少なくとも一方、または、前記第3の領域および前記第4の領域の少なくとも一方には、質量部が設けられていることを特徴とする物理量センサー。 - 請求項1ないし4のいずれか一項に記載の物理量センサーであって、
前記第1揺動体および前記第2揺動体を備えたベースは、平面視で、前記第1の領域に対向する第5の領域と、前記第2の領域に対向する第6の領域と、前記第3の領域に対向する第7の領域と、前記第4の領域に対向する第8の領域と、を有し、
前記固定電極は、前記第5〜8の領域の各々に設けられていることを特徴とする物理量センサー。 - 請求項5に記載の物理量センサーであって、
前記第1可動電極は、前記第1の領域と前記第2の領域とに跨って共通に設けられていることを特徴とする物理量センサー。 - 請求項5に記載の物理量センサーであって、
前記第2可動電極は、前記第3の領域と前記第4の領域とに跨って共通に設けられていることを特徴とする物理量センサー。 - 請求項1ないし7のいずれか一項に記載の物理量センサーであって、
前記第1揺動体には、開口部が設けられ、
前記開口部に配置された可動錘部と、
前記可動錘部と前記第1揺動体とを連結する連結部と、
前記第1揺動体から前記可動錘部に向けて設けられている第1腕状電極部と、
前記可動錘部から前記第1揺動体に向けて前記第1腕状電極部に対向して設けられている第2腕状電極部と、を備えていることを特徴とする物理量センサー。 - 揺動体を備え、
前記揺動体は、第1軸上に配置された第1支持部と第2支持部とによって支持され、且つ、平面視で前記第1軸によって第1の領域と第2の領域とに区画され、
前記揺動体は、
開口部と、
前記開口部に配置された可動錘部と、
前記可動錘部と前記揺動体とを連結する連結部と、
を備え、
前記第1の領域と前記第2の領域との各々には、前記揺動体から前記可動錘部に向けて設けられている第1腕状電極部が設けられ、
前記第1の領域と前記第2の領域との各々には、前記可動錘部から前記第1揺動体に向けて前記第1腕状電極部に対向して第2腕状電極部が設けられ、
前記第1の領域および前記第2の領域の少なくとも一方には、質量部が設けられていることを特徴とする物理量センサー。 - 請求項9に記載の物理量センサーであって、
前記第1軸は、前記揺動体の中心を通る線と平行であることを特徴とする物理量センサー。 - 請求項1ないし10のいずれか一項に記載の物理量センサーを備えることを特徴とする電子機器。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010122959A JP5527019B2 (ja) | 2010-05-28 | 2010-05-28 | 物理量センサーおよび電子機器 |
| KR1020110048430A KR101300576B1 (ko) | 2010-05-28 | 2011-05-23 | 물리량 센서 및 전자 기기 |
| TW100118352A TWI471567B (zh) | 2010-05-28 | 2011-05-25 | Inertial sensors and electronic machines |
| TW104101215A TWI524071B (zh) | 2010-05-28 | 2011-05-25 | Physical quantity sensor and electronic machine |
| EP11167631A EP2390671A3 (en) | 2010-05-28 | 2011-05-26 | Physical quantity sensor and electronic apparatus |
| US13/116,455 US8736254B2 (en) | 2010-05-28 | 2011-05-26 | Physical quantity sensor and electronic apparatus |
| CN2011101410029A CN102313821B (zh) | 2010-05-28 | 2011-05-27 | 物理量传感器以及电子设备 |
| US14/252,023 US9157927B2 (en) | 2010-05-28 | 2014-04-14 | Physical quantity sensor and electronic apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010122959A JP5527019B2 (ja) | 2010-05-28 | 2010-05-28 | 物理量センサーおよび電子機器 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014085256A Division JP5831582B2 (ja) | 2014-04-17 | 2014-04-17 | 物理量センサーおよび電子機器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011247812A JP2011247812A (ja) | 2011-12-08 |
| JP2011247812A5 JP2011247812A5 (ja) | 2013-06-27 |
| JP5527019B2 true JP5527019B2 (ja) | 2014-06-18 |
Family
ID=44117957
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010122959A Expired - Fee Related JP5527019B2 (ja) | 2010-05-28 | 2010-05-28 | 物理量センサーおよび電子機器 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US8736254B2 (ja) |
| EP (1) | EP2390671A3 (ja) |
| JP (1) | JP5527019B2 (ja) |
| KR (1) | KR101300576B1 (ja) |
| CN (1) | CN102313821B (ja) |
| TW (2) | TWI471567B (ja) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5527019B2 (ja) * | 2010-05-28 | 2014-06-18 | セイコーエプソン株式会社 | 物理量センサーおよび電子機器 |
| US8539836B2 (en) * | 2011-01-24 | 2013-09-24 | Freescale Semiconductor, Inc. | MEMS sensor with dual proof masses |
| CA2860544A1 (en) | 2012-01-12 | 2013-07-18 | Murata Electronics Oy | Accelerator sensor structure and use thereof |
| JP5983912B2 (ja) | 2012-02-09 | 2016-09-06 | セイコーエプソン株式会社 | 電子デバイスおよびその製造方法、並びに電子機器 |
| JP5999302B2 (ja) | 2012-02-09 | 2016-09-28 | セイコーエプソン株式会社 | 電子デバイスおよびその製造方法、並びに電子機器 |
| JP2013181855A (ja) * | 2012-03-02 | 2013-09-12 | Seiko Epson Corp | 物理量センサーおよび電子機器 |
| TWI547808B (zh) | 2012-04-20 | 2016-09-01 | 緯創資通股份有限公司 | 資訊交換方法及資訊交換系統 |
| JP6002481B2 (ja) * | 2012-07-06 | 2016-10-05 | 日立オートモティブシステムズ株式会社 | 慣性センサ |
| JP6230285B2 (ja) * | 2012-08-24 | 2017-11-15 | セイコーインスツル株式会社 | 電子デバイス、memsセンサ及び電子デバイスの製造方法 |
| JP5799929B2 (ja) * | 2012-10-02 | 2015-10-28 | 株式会社村田製作所 | 加速度センサ |
| US9316666B2 (en) * | 2012-11-27 | 2016-04-19 | Murata Manufacturing Co., Ltd. | Acceleration sensor having a capacitor array located in the center of an inertial mass |
| DE102013208534A1 (de) * | 2012-12-27 | 2014-07-03 | Robert Bosch Gmbh | Verfahren zum Herstellen eines Sensorgehäuses sowie entsprechendes Sensorgehäuse |
| US9075079B2 (en) * | 2013-03-07 | 2015-07-07 | MCube Inc. | Method and structure of an integrated MEMS inertial sensor device using electrostatic quadrature-cancellation |
| US10046964B2 (en) | 2013-03-07 | 2018-08-14 | MCube Inc. | MEMS structure with improved shielding and method |
| US10309997B2 (en) * | 2013-03-15 | 2019-06-04 | Infineon Technologies Ag | Apparatus and a method for generating a sensor signal indicating information on a capacitance of a variable capacitor comprising a variable capacitance |
| ITTO20130237A1 (it) * | 2013-03-22 | 2014-09-23 | St Microelectronics Srl | Struttura microelettromeccanica di rilevamento ad asse z ad elevata sensibilita', in particolare per un accelerometro mems |
| JP6150056B2 (ja) * | 2013-07-24 | 2017-06-21 | セイコーエプソン株式会社 | 機能素子、電子機器、および移動体 |
| JP6146566B2 (ja) * | 2013-08-06 | 2017-06-14 | セイコーエプソン株式会社 | 物理量センサー、電子機器、および移動体 |
| US9695515B2 (en) * | 2013-08-30 | 2017-07-04 | Hewlett-Packard Development Company, L.P. | Substrate etch |
| US9551730B2 (en) | 2014-07-02 | 2017-01-24 | Merlin Technology, Inc. | Mechanical shock resistant MEMS accelerometer arrangement, associated method, apparatus and system |
| RU2580637C1 (ru) * | 2014-12-16 | 2016-04-10 | Открытое акционерное общество Арзамасское научно-производственное предприятие "ТЕМП-АВИА" (ОАО АНПП "ТЕМП-АВИА") | Емкостный датчик перемещений |
| JP2016176834A (ja) * | 2015-03-20 | 2016-10-06 | セイコーエプソン株式会社 | ジャイロセンサー、電子機器、および移動体 |
| CN107636473B (zh) * | 2015-05-20 | 2020-09-01 | 卢米达因科技公司 | 从非线性的周期性信号中提取惯性信息 |
| US9797921B2 (en) * | 2015-09-03 | 2017-10-24 | Nxp Usa, Inc. | Compensation and calibration of multiple mass MEMS sensor |
| WO2017051243A1 (en) * | 2015-09-25 | 2017-03-30 | Murata Manufacturing Co., Ltd. | Improved microelectromechanical accelerometer device |
| JP6468167B2 (ja) * | 2015-11-03 | 2019-02-13 | 株式会社デンソー | 力学量センサ |
| JP6705168B2 (ja) * | 2015-12-28 | 2020-06-03 | セイコーエプソン株式会社 | センサー用基板、物理量検出センサー、加速度センサー、電子機器、および移動体 |
| DE102016207866A1 (de) | 2016-05-09 | 2017-11-09 | Robert Bosch Gmbh | Mikromechanischer Sensor und Verfahren zum Herstellen eines mikromechanischen Sensors |
| US10234477B2 (en) | 2016-07-27 | 2019-03-19 | Google Llc | Composite vibratory in-plane accelerometer |
| US10239746B2 (en) * | 2016-11-11 | 2019-03-26 | Analog Devices, Inc. | Vertical stopper for capping MEMS devices |
| JP6897224B2 (ja) * | 2017-03-27 | 2021-06-30 | セイコーエプソン株式会社 | 物理量センサー、電子機器、および移動体 |
| CN107421526B (zh) * | 2017-07-04 | 2020-05-05 | 东南大学 | 一种仿生双轴毛发传感器装置 |
| US11820648B2 (en) * | 2018-05-15 | 2023-11-21 | Murata Manufacturing Co., Ltd. | Vibration damping in MEMS acceleration sensors |
| RU204922U1 (ru) * | 2019-03-19 | 2021-06-17 | Российская Федерация, От Имени Которой Выступает Министерство Промышленности И Торговли Российской Федерации | Чувствительный элемент трехосевого микромеханического акселерометра |
| EP4116718A1 (en) | 2021-07-05 | 2023-01-11 | Murata Manufacturing Co., Ltd. | Seesaw accelerometer |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1640726U (de) | 1951-12-01 | 1952-07-10 | Ernst Reuss | Wagenaufhaltevorrichtung fuer foerderwagen. |
| US6199874B1 (en) * | 1993-05-26 | 2001-03-13 | Cornell Research Foundation Inc. | Microelectromechanical accelerometer for automotive applications |
| US5488864A (en) * | 1994-12-19 | 1996-02-06 | Ford Motor Company | Torsion beam accelerometer with slotted tilt plate |
| DE19541388A1 (de) | 1995-11-07 | 1997-05-15 | Telefunken Microelectron | Mikromechanischer Beschleunigungssensor |
| US6928872B2 (en) * | 2001-04-27 | 2005-08-16 | Stmicroelectronics S.R.L. | Integrated gyroscope of semiconductor material with at least one sensitive axis in the sensor plane |
| JP2005221450A (ja) * | 2004-02-09 | 2005-08-18 | Yamaha Corp | 物理量センサ |
| DE602004023082D1 (de) * | 2004-09-22 | 2009-10-22 | St Microelectronics Srl | Mikro-Elektromechanische Struktur mit Selbstkompensation von durch thermomechanische Spannungen hervorgerufenen thermischen Driften |
| JP4975972B2 (ja) * | 2005-03-15 | 2012-07-11 | 日立オートモティブシステムズ株式会社 | 物理量センサ |
| US20070220973A1 (en) * | 2005-08-12 | 2007-09-27 | Cenk Acar | Multi-axis micromachined accelerometer and rate sensor |
| DE102006058747A1 (de) | 2006-12-12 | 2008-06-19 | Robert Bosch Gmbh | Mikromechanischer z-Sensor |
| ITTO20070033A1 (it) | 2007-01-19 | 2008-07-20 | St Microelectronics Srl | Dispositivo microelettromeccanico ad asse z con struttura di arresto perfezionata |
| US7578190B2 (en) | 2007-08-03 | 2009-08-25 | Freescale Semiconductor, Inc. | Symmetrical differential capacitive sensor and method of making same |
| US8079262B2 (en) | 2007-10-26 | 2011-12-20 | Rosemount Aerospace Inc. | Pendulous accelerometer with balanced gas damping |
| JP5470767B2 (ja) * | 2008-07-28 | 2014-04-16 | 富士通株式会社 | マイクロ可動素子製造方法 |
| DE102008040855B4 (de) * | 2008-07-30 | 2022-05-25 | Robert Bosch Gmbh | Dreiachsiger Beschleunigungssensor |
| TWI374268B (en) * | 2008-09-05 | 2012-10-11 | Ind Tech Res Inst | Multi-axis capacitive accelerometer |
| DE102008042357A1 (de) | 2008-09-25 | 2010-04-01 | Robert Bosch Gmbh | Mikromechanischer Sensor mit symmetrischem Flächenaufbau bei asymmetrischer Massenverteilung |
| JP5527019B2 (ja) * | 2010-05-28 | 2014-06-18 | セイコーエプソン株式会社 | 物理量センサーおよび電子機器 |
-
2010
- 2010-05-28 JP JP2010122959A patent/JP5527019B2/ja not_active Expired - Fee Related
-
2011
- 2011-05-23 KR KR1020110048430A patent/KR101300576B1/ko active IP Right Grant
- 2011-05-25 TW TW100118352A patent/TWI471567B/zh not_active IP Right Cessation
- 2011-05-25 TW TW104101215A patent/TWI524071B/zh not_active IP Right Cessation
- 2011-05-26 EP EP11167631A patent/EP2390671A3/en not_active Withdrawn
- 2011-05-26 US US13/116,455 patent/US8736254B2/en active Active
- 2011-05-27 CN CN2011101410029A patent/CN102313821B/zh active Active
-
2014
- 2014-04-14 US US14/252,023 patent/US9157927B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR20110131106A (ko) | 2011-12-06 |
| CN102313821A (zh) | 2012-01-11 |
| US8736254B2 (en) | 2014-05-27 |
| US20140224017A1 (en) | 2014-08-14 |
| TWI471567B (zh) | 2015-02-01 |
| TW201200876A (en) | 2012-01-01 |
| KR101300576B1 (ko) | 2013-08-27 |
| EP2390671A3 (en) | 2011-12-28 |
| TWI524071B (zh) | 2016-03-01 |
| US9157927B2 (en) | 2015-10-13 |
| EP2390671A2 (en) | 2011-11-30 |
| JP2011247812A (ja) | 2011-12-08 |
| TW201514498A (zh) | 2015-04-16 |
| CN102313821B (zh) | 2013-03-20 |
| US20110291644A1 (en) | 2011-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5527019B2 (ja) | 物理量センサーおよび電子機器 | |
| US11808574B2 (en) | Micromechanical detection structure of a MEMS multi-axis gyroscope, with reduced drifts of corresponding electrical parameters | |
| US10209269B2 (en) | Z-axis microelectromechanical detection structure with reduced drifts | |
| JP5831582B2 (ja) | 物理量センサーおよび電子機器 | |
| JP5527015B2 (ja) | 素子構造体、慣性センサー、電子機器 | |
| US7258011B2 (en) | Multiple axis accelerometer | |
| CN105372451B (zh) | 物理量传感器、物理量传感器装置、电子设备以及移动体 | |
| US20160091528A1 (en) | Microelectromechanical device incorporating a gyroscope and an accelerometer | |
| JP5930183B2 (ja) | 物理量センサーおよび電子機器 | |
| EP2284545A2 (en) | Coplanar proofmasses employable to sense acceleration along three axes | |
| JP5527017B2 (ja) | 素子構造体、慣性センサーおよび電子機器 | |
| TW201625953A (zh) | 微機電系統感測器和半導體封裝 | |
| JP2015125124A (ja) | 多軸センサ | |
| EP3240996B1 (en) | Micromechanical gyroscope structure | |
| US11085766B2 (en) | Micromachined multi-axis gyroscopes with reduced stress sensitivity | |
| JP6544058B2 (ja) | 物理量センサー、電子機器および移動体 | |
| US20240142235A1 (en) | Microelectromechanical gyroscope with detection of angular velocity along a vertical axis | |
| CN117452023A (zh) | 物理量传感器以及惯性测量装置 | |
| JP2022022024A (ja) | 慣性センサー、慣性計測装置、及び慣性センサーの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130513 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130513 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131210 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140210 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140318 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140331 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5527019 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |