JP5550201B2 - 時間最適アーム動作を生成する方法 - Google Patents
時間最適アーム動作を生成する方法 Download PDFInfo
- Publication number
- JP5550201B2 JP5550201B2 JP2001500199A JP2001500199A JP5550201B2 JP 5550201 B2 JP5550201 B2 JP 5550201B2 JP 2001500199 A JP2001500199 A JP 2001500199A JP 2001500199 A JP2001500199 A JP 2001500199A JP 5550201 B2 JP5550201 B2 JP 5550201B2
- Authority
- JP
- Japan
- Prior art keywords
- trajectory
- acceleration
- arm
- shape
- end effector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images





















































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Systems or methods specially adapted for specific business sectors, e.g. utilities or tourism
- G06Q50/04—Manufacturing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
- G06Q10/06—Resources, workflows, human or project management; Enterprise or organisation planning; Enterprise or organisation modelling
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40395—Compose movement with primitive movement segments from database
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40454—Max velocity, acceleration limit for workpiece and arm jerk rate as constraints
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40519—Motion, trajectory planning
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/136—Associated with semiconductor wafer handling including wafer orienting means
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/137—Associated with semiconductor wafer handling including means for charging or discharging wafer cassette
Description
本発明は、ロボットマニピュレータに関し、特に、シングルアーム、デュアルアーム、マルチアームロボットマニピュレータの単純移動及び複合、即ち合成移動に対して、制約を受けた時間最適軌道の信頼性を有し且つ効率の良い生成をなす方法及び手段に関する。
シングルアーム、デュアルアーム、及びマルチアーム、すなわちシングルエンドエフェクタ、デュアルエンドエフェクタ、及びマルチエンドエフェクタ、ロボットマニピュレータは、従来の周知の実施例において様々なタイプの搬送装置の中で使用されている。かかる実施例を含む代表的な搬送装置の例は、アメリカ特許第4,730,976号、第5,180,276号,第5,404,894号、第5,431,529号、第5,647,724号、第5,655,060号、第5,765,983号、及びアメリカ特許出願第09/163,844号に開示されている。アメリカ特許出願第09/163,844号の出願人は、本願と同一である。また、上記特許及び出願の内容は全て本明細書に取り込まれているものとする。
このように、当該分野において、マニピュレータのマルチアームの動作を制御する追跡容易、即ち連続した加速度プロファイルを有する時間最適軌道を信頼性を有しつつ且つ効率良く計算できる、マルチアームロボットマニピュレータにおける軌道生成を行うことに対して需要が存在する。合成して円滑なノンストップ搬送路を生成できる単純移動用の軌道を生成する取り組み、及びこの合成を行う方法に対する需要も存在する。
故に、本発明の目的は、速度、加速度、ジャークの制約を受けて、直線に沿った伸長及び収縮移動、又は円弧に追従する回転移動などの、マルチアームロボットマニピュレータの単純移動を制御する、追跡容易、即ち連続した加速度プロファイルを有する時間最適軌道の信頼性を有し且つ効率の良い生成をなすための方法及び手段を提供することである。
本発明のさらなる目的は、マルチアームロボットマニピュレータの単純移動用の軌道を生成し、これらの移動を合成して円滑なノンストップ搬送路を形成するシステム及び方法を提供することである。
本発明は、速度、加速度、ジャークの制約を受けて、場合によってはジャーク速度の制約を受けて、直線に沿った伸長及び収縮移動や、円弧に追従する回転移動を含む、マルチアームロボットマニピュレータの単純移動及び合成移動用の追跡容易、即ち連続する加速度プロファイルを有する時間最適軌道の信頼性を呈し且つ効率の良い生成をなす方法及び手段を提供することを目的とする。時間最適軌道は、所定の制約を犯さずに可能な最短時間内で所定路に沿った選択されたエンドエフェクタの移動を記述する位置、速度、加速度プロファイルのセットになることが分かる。特に、本発明は、所定のカテゴリの移動に対する制約条件の全ての組み合わせをカバーする基本軌道形状のセットを最初に特定する。尚、所定のカテゴリの移動とは、例えば、直線や円弧に沿った移動である。次に、本発明は、基本形状を、単一の制約が有効となるセグメントに分解し、次に、セグメントでの時間最適路を判別するものである。結果として、時間最適軌道の唯一の構成が、1組の所定軌道形状に基づいて生成される。
本発明の特徴を、添付図面を参照して、以下に説明する。
本発明は、搬送装置でのマルチアームロボットマニピュレータの動作を制御して、単純移動及び複合移動による搬送アーム動作の間、追跡容易、即ち連続した加速プロファイルを有する時間最適軌道を信頼性を呈し且つ効率良く生成する方法及び手段を含む。時間最適軌道は、所定の制約を犯さずに可能な最短時間で所定パスに沿って選択されたアームの動作を描写する、位置、速度、加速度プロファイルのセットとして理解される。そして、特別な場合が最適中止軌道であれば、移動アームは最短時間のうちに完全休止状態になる。本発明の目的は、例えばアメリカ特許第5,655,060号に記されるように、既存のアプローチの他の不都合と同様に、円によって囲まれた曲線部分によって図1乃至図10の従来の加速度プロファイルに示すように、基板及び他の搬送装置にて既存の軌道生成の典型的な不都合により発生する中断を克服することである。本発明は、速度、加速度、及びジャークの制約を伴う、直線に沿った伸長及び収縮移動や、円弧に沿う回転動作などのアーム動作を、円滑にするために使用される。後方軌道(移動の終了位置から後方)及び前方軌道(移動の開始位置から前方)が繰り返し計算されて合成される既存のアプローチとは対照的に、単純移動及び複合移動用の時間最適軌道の信頼性を呈し且つ効率の良い生成は、以下の行程によって行われる。あるカテゴリの移動、すなわち直線に沿った移動や円弧に沿った移動に対する制約の起こり得る組み合わせの全てをカバーする基本軌道形状のセットを特定する行程と、単一の制約が有効となるセグメントに基本形状を分解する行程と、セグメントにおける時間最適パスを判別する行程とである。次に、所望の軌道が、適当なセグメントを軌道のパスに組み立てることによって生成される。このように、本発明は、あらかじめ定義された軌道形状のセットに基づいて時間最適軌道の構成を生成し、合成を経て複合移動用の軌道を計算する方法を提供するために使用される。
用形の簡単な型として見なされる。基本軌道形状の各々は、関連した1組の条件を有し、
この条件が、ある形状が特定の移動に対して使用できるか否かを判別する。例えば、選択
された基本軌道形状に関連する1組の条件は、以下のようになる。
例1:図12の形状、即ち直線移動用の最も複雑な形状に対して満たすべき条件は、(t
1 > t0) 及び (t3 > t2) 及び (t6 > t5)であり、即ち、セグメント0−1
,2−3,5−6が存在する。
例2:図19の形状、即ち直線移動に対して最も単純な形状に対して満たすべき条件は、

、ジャーク速度を含む1組のノードによって完全に定義される。対応する位置、速度、加
速度プロファイルは、選択された軌道形状に関連した1組の式を使用してノードから構成
される。
移動の基本カテゴリに対する汎用(基本)軌道形状、その数学的説明、関連する基本軌
道形状の説明を次に説明する。
直線に沿うシングルアームロボット移動 最初に、本発明による直線に沿ったシングル
アームロボットの移動を検討する。これの移動は、エンドエフェクタの中心点に作用する
、最大速度、加速度、ジャーク、ジャーク速度による制約を受ける。典型的な時間最適軌
道形状を、図11乃至図19に示す。図11乃至図19において、セグメント名は、以下
のパラメータを表す。a = 加速度 (m/s2)
ai = ノードiでの加速度 (m/s2)
amax = 最大加速度 (m/s2)
d = ジャークの変化率 (m/s4)
di = ノードiでのジャークの変化率 (m/s4)
dmax = ジャークでの最大変化率 (m/s4)
j = ジャーク (m/s3)
ji = ノードiでのジャーク (m/s3)
jmax = 最大ジャーク (m/s3)
s = 位置 (m)
si = ノードiでの位置 (m)
smax = 移動距離 (m)
t = 時間 (s)
ti = ノードiでの時間 (s)
v = 速度 (m/s)
vi = ノードiでの速度 (m/s)
vmax = 最大速度 (m/s)
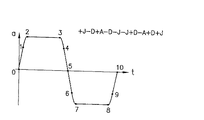
図11は、以下の12のセグメントから構成される直線ラインに沿う移動用の汎用軌道形
状を示す。12のセグメントは、セグメント0−1: j = +jmaxセグメント1−2:
d = −dmaxセグメント2−3: a = +amaxセグメント3−4: d = −dmaxセ
グメント4−5: j = −jmaxセグメント5−6: v = vmaxセグメント6−7:
v = vmaxセグメント7−8: j = −jmaxセグメント8−9: d = +dmaxセグ
メント9−10: a = −amaxセグメント10−11: d = +dmaxセグメント11
−12: j = +jmaxからなる。
円弧に沿ったシングルアームロボット移動 次に、本発明による円弧に沿ったシングルアームロボットの移動を検討する。この移動は、エンドエフェクタの中心点に作用する、最大速度、加速度、ジャークによる制約を受ける。典型的な時間最適軌道形状を、図26乃至図32に示す。図26乃至図32において、セグメント識別名は、以下のパラメータを示す。即ち、ac = 遠心加速度 (m/s2)
amax = 最大全加速度 (m/s2)
at = 接線加速度 (m/s2)
ati = ノードiでの接線加速度 (m/s2)
atotal = 全(接線+遠心)加速度 (m/s2)
jmax = 最大接線ジャーク (m/s3)
jt = 接線ジャーク (m/s3)
jti = ノードiでの接線ジャーク (m/s3)
r = 円弧の半径 (m)
s = 位置 (m)
si = ノードiでの位置 (m)
smax = 移動距離 (m)
v = 速度 (m/s)
vi = ノードiでの速度 (m/s)
vmax = 最大速度 (m/s)
t = 時間 (s)
ti = ノードiでの時間 (s)
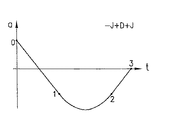
図26は、加速度プロファイル、加速度対時間のグラフを示し、円弧に沿った移動用の汎用軌道形状を示す。これは、8つのセグメントからなる。即ち、セグメント0−1: jt = +jmaxセグメント1−2: atotal = amaxセグメント2−3: jt = −jmaxセグメント3−4: v = vmaxセグメント4−5: v = vmaxセグメント5−6: jt = −jmaxセグメント6−7: atotal = amaxセグメント7−8: jt = +jmax エンドエフェクタの中心点の全加速度は、その接線方向成分及び遠心方向成分に関して以下のように表すことができる。
位置、速度、加速度プロファイルは、以下の式を使用してノードから計算される。
デュアルアームカエル足ロボット半径方向移動 半径方向の移動は、ロボットの中心に関する半径方向における直線移動である。デュアルアームカエル足ロボットの典型的な半径方向移動用の軌道生成を説明する。
エンドエフェクタAは、半径方向移動を行うものと仮定する。この移動は、エンドエフェクタAに作用するジャーク及び最大許容加速度と、エンドエフェクタBの最大許容加速度とによる制約を受ける。一般に、2つの加速度制約は、必ずしも等しいものではない。時間最適軌道形状を、図35乃至図47に示す。図35乃至図47において、セグメント名は、以下のパラメータを示す。
aA = アームAの加速度 (m/s2)
aAi = ノードiでのアームAの加速度 (m/s2)
aAmax = アームAの最大加速度 (m/s2)
aB = アームBの加速度 (m/s2)
aBi = ノードiでのアームBの加速度 (m/s2)
aBmax = アームBの最大加速度 (m/s2)
jA = アームAのジャーク (m/s3)
jAi = ノードiでのアームAのジャーク (m/s3)
jAmax = アームAの最大ジャーク (m/s3)
jB = アームBのジャーク (m/s3)
jBi = ノードiでのアームBのジャーク (m/s3)
sA = アームAの位置 (m)
sAi = ノードiでのアームAの位置 (m)
sB = アームBの位置 (m)
sBi = ノードiでのアームBの位置 (m)
t = 時間 (s)
ti = ノードiでの時間 (s)
vA = アームAの速度 (m/s)
vAi = ノードiでのアームAの速度 (m/s)
vB = アームBの速度 (m/s)
vBi = ノードiでのアームBの速度 (m/s)
2つの基本的な事例が、加速度限界の値に基づいて識別される。
事例1: aAmax ≦ aBmax 事例2: aAmax > aBmax エンドエフェクタBの加速度は、デュアルアームカエル足ロボットの周知の構成に対する半径方向移動の間、aAmaxを犯さないので、aAmax ≦ aBmaxの時、加速度限界aBmaxは有効にならない。その結果、上記のシングルアームロボットの直線移動に関しては、同一の軌道形状が事例1において使用される。事例2に対する汎用軌道形状を図35に示す。汎用軌道形状は、以下に示す7つのセグメントからなる。
セグメント0−1: jA = +jAmaxセグメント1−2: aB = −aBmaxセグメント2−3: jA = +jAmaxセグメント3−4: aA = aAlimセグメント4−5: jA = −jAmaxセグメント5−6: aA = −aAmaxセグメント6−7: jA = +jAmax 最適解からの僅かなずれを犠牲にして、aAlimの値は、max(aB)=aBmaxとなるように選択される。この簡素化により、必要な基本軌道形状の数は、相当に減少される。位置、速度、加速度プロファイルは、以下の式によりノードから計算される。
j=1に対し、i=B (4.26)
デュアルアームロボット回転移動 説明すべき単純移動の最後のカテゴリは、デュアルアームロボット、即ち2つのエンドエフェクタを備えたロボットマニピュレータの回転移動である。ロボットのエンドエフェクタが中心を共通とする円弧に沿って移動するとき、回転移動は実施される。
aAmax / rA ≦ aBmax / rB (4.27)
但し、aAmax = アームAの最大加速度 (m/s2)
aBmax = アームBの最大加速度 (m/s2)
rA = アームAの回転半径 (m)
rB = アームBの回転半径 (m)
その結果、同一の基本軌道形状が、図26乃至図34に関して、上記のように、シングルアームロボットに関して使用できる。式(4.27)の条件を満足しない場合、軌道は、エンドエフェクタBに関連した加速度限界及び半径に基づいて生成すべきである。
2つの直線移動の合成 制約条件下での最初の連続移動の概略を、図50(a)に示す。これは、パスでの2つの直線セグメント、すなわち、ポイント「0」から「1」までと、ポイント「1」から「2」までとからなる。例えば、上記の所定時間最適軌道形状に基づいて生成された、2つのセグメント用の軌道が利用可能であると仮定すると、この合成移動用の位置、速度、加速度プロファイルは、以下の式を使用して得られる。
x1,y1 = ポイント1でのx、y座標 (m)
sA,vA,aA = セグメント0−1に対する位置、速度、加速度プロファイル(m)
sB,vB,aB = セグメント1−2に対する位置、速度、加速度プロファイル(m)
tA = セグメント0−1に沿った移動存続期間 (S)
Δ = オーバラップ時間 (s)
直線及び円弧の合成 制約条件下での第2の順次移動の概略を、図50(b)に示す。これは、連続した、ポイント「0」から「1」までの直線に沿った第1の移動と、次の、ポイント「1」から「2」までの円弧に沿った移動とからなる。例えば、上記のように所定の時間最適軌道形状に基づいて生成された、2つのセグメント用の軌道が利用可能であると仮定すると、混合移動用の位置、速度、加速度プロファイルは、以下の式を利用して計算される。
x1,y1 = ポイント1でのx、y座標(m)
xc,yc = 円弧の中心のx、y座標(m)
sA,vA,aA = セグメント0−1の位置(m),速度(m/s),加速度プロファイル(m/s2)
sB,vB,aB = セグメント1−2の位置(m),速度(m/s),加速度プロファイル(m/s2)
tA = セグメント0−1に沿った移動の持続期間(s)
Δ = オーバラップ時間(s)
直線に沿った2つの移動、即ち、ポイント「0」から「1」までとポイント「2」から「3」までとのセグメントと、円弧に沿った移動、即ちポイント「1」から「2」までのセグメントとの合成を、図52に示す。図52は、各セグメントに続く丸い基板を示し、左側(a)は順次の事例を示し、右側は複合移動を示す。左側(a)の事例は、従来例によるパスを示し、右側(b)は、本発明による複合移動が行われた円形基板用の最適搬送路を示す。
【図面の簡単な説明】
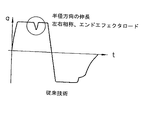
【図1】
従来の加速度プロファイル、加速度対時間のグラフを示し、基板搬送装置での既存の軌道生成と共に生じる円内の代表的な不都合を示し、特に、加速度制約が有効の(少なくとも1つのエンドエフェクタがロードされる)場合のアームの半径方向の伸長を示す。
【図2】
従来の加速度プロファイル、加速度対時間のグラフを示し、基板搬送装置での既存の軌道生成と共に生じる円内の代表的な不都合を示し、特に、加速度制約が有効の(少なくとも1つのエンドエフェクタがロードされる)場合のアームの半径方向の伸長を示す。
【図3】
従来の加速度プロファイル、加速度対時間のグラフを示し、基板搬送装置での既存の軌道生成と共に生じる円内の代表的な不都合を示し、特に、加速度制約が有効の(少なくとも1つのエンドエフェクタがロードされる)場合のアームの半径方向の伸長を示す。
【図4】
従来の加速度プロファイル、加速度対時間のグラフを示し、基板搬送装置での既存の軌道生成と共に生じる円内の代表的な不都合を示し、特に、加速度制約が有効の(少なくとも1つのエンドエフェクタがロードされる)場合のアームの半径方向の伸長を示す。
【図5】
従来の加速度プロファイル、加速度対時間のグラフを示し、基板搬送装置での既存の軌道生成と共に生じる円内の代表的な欠点を示し、特に、加速度制約が非活動の(エンドエフェクタがアンロードされる)場合の半径方向の伸長を示す。
【図6】
従来の加速度プロファイル、加速度対時間のグラフを示し、基板搬送装置での既存の軌道生成と共に生じる円内の代表的な欠点を示し、特に、加速度制約が非活動の(エンドエフェクタがアンロードされる)場合の半径方向の伸長を示す。
【図7】
従来の加速度プロファイル、加速度対時間のグラフを示し、基板搬送装置での既存の軌道生成と共に生じる円内の代表的な欠点を示し、加速度制約が有効の(少なくとも1つのエンドエフェクタがロードされた)場合の回転動作を示す。
【図8】
従来の加速度プロファイル、加速度対時間のグラフを示し、基板搬送装置での既存の軌道生成と共に生じる円内の代表的な欠点を示し、特に、加速度制約が有効の(少なくとも1つのエンドエフェクタがロードされた)場合の回転動作を示す。
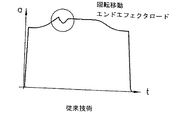
【図9】
従来の加速度プロファイル、加速度対時間のグラフを示し、基板搬送装置での既存の軌道生成と共に生じる円内の代表的な欠点を示し、特に、加速度制約が有効の(少なくとも1つのエンドエフェクタがロードされた)場合の回転動作を示す。
【図10】
従来の加速度プロファイル、加速度対時間のグラフを示し、基板搬送装置での既存の軌道生成と共に生じる円内の代表的な欠点を示し、特に、加速度制約が非活動の(エンドエフェクタがアンロードされる)場合の回転動作を示す。
【図11】
シングルアームロボットの移動用の典型的な時間最適形状を示す加速度プロファイルを示し、特に、直線に沿う移動用の汎用軌道形状を示す。
【図12】
シングルアームロボットの移動用の典型的な時間最適形状を示す加速度プロファイルを示し、図11の汎用形状から導かれる形状を含み、且ついわゆる軌道ノード、すなわち軌道をセグメントに分割するポイント、を示す番号を伴う直線に沿った動作用の基本軌道形状を示す。
【図13】
シングルアームロボットの移動用の典型的な時間最適形状を示す加速度プロファイルを示し、図11の汎用形状から導かれる形状を含み、且ついわゆる軌道ノード、すなわち軌道をセグメントに分割するポイント、を示す番号を伴う直線に沿った動作用の基本軌道形状を示す。
【図14】
シングルアームロボットの移動用の典型的な時間最適形状を示す加速度プロファイルを示し、図11の汎用形状から導かれる形状を含み、且ついわゆる軌道ノード、すなわち軌道をセグメントに分割するポイント、を示す番号を伴う直線に沿った動作用の基本軌道形状を示す。
【図15】
シングルアームロボットの移動用の典型的な時間最適形状を示す加速度プロファイルを示し、図11の汎用形状から導かれる形状を含み、且ついわゆる軌道ノード、すなわち軌道をセグメントに分割するポイント、を示す番号を伴う直線に沿った動作用の基本軌道形状を示す。
【図16】
シングルアームロボットの移動用の典型的な時間最適形状を示す加速度プロファイルを示し、図11の汎用形状から導かれる形状を含み、且ついわゆる軌道ノード、すなわち軌道をセグメントに分割するポイント、を示す番号を伴う直線に沿った動作用の基本軌道形状を示す。
【図17】
シングルアームロボットの移動用の典型的な時間最適形状を示す加速度プロファイルを示し、図11の汎用形状から導かれる形状を含み、且ついわゆる軌道ノード、すなわち軌道をセグメントに分割するポイント、を示す番号を伴う直線に沿った動作用の基本軌道形状を示す。
【図18】
シングルアームロボットの移動用の典型的な時間最適形状を示す加速度プロファイルを示し、図11の汎用形状から導かれる形状を含み、且ついわゆる軌道ノード、すなわち軌道をセグメントに分割するポイント、を示す番号を伴う直線に沿った動作用の基本軌道形状を示す。
【図19】
シングルアームロボットの移動用の典型的な時間最適形状を示す加速度プロファイルを示し、図11の汎用形状から導かれる形状を含み、且ついわゆる軌道ノード、すなわち軌道をセグメントに分割するポイント、を示す番号を伴う直線に沿った動作用の基本軌道形状を示す。
【図20】
中止軌道用の図12乃至図19の軌道形状に対応する軌道形状の概要を示す。
【図21】
中止軌道用の図12乃至図19の軌道形状に対応する軌道形状の概要を示す。
【図22】
中止軌道用の図12乃至図19の軌道形状に対応する軌道形状の概要を示す。
【図23】
中止軌道用の図12乃至図19の軌道形状に対応する軌道形状の概要を示す。
【図24】
中止軌道用の図12乃至図19の軌道形状に対応する軌道形状の概要を示す。
【図25】
中止軌道用の図12乃至図19の軌道形状に対応する軌道形状の概要を示す。
【図26】
本発明により、円弧に沿ったシングルアームロボット及びマルチアームロボットの移動用の汎用時間最適軌道形状の加速度プロファイルを示す。
【図27】
図26に示す汎用形から導出される基本軌道形状の完全セットを示す。
【図28】
図26に示す汎用形から導出される基本軌道形状の完全セットを示す。
【図29】
図26に示す汎用形から導出される基本軌道形状の完全セットを示す。
【図30】
図26に示す汎用形から導出される基本軌道形状の完全セットを示す。
【図31】
図26に示す汎用形から導出される基本軌道形状の完全セットを示す。
【図32】
図26に示す汎用形から導出される基本軌道形状の完全セットを示す。
【図33】
中止軌道用に対応する形状を示す。
【図34】
中止軌道用に対応する形状を示す。
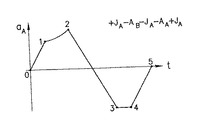
【図35】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に汎用軌道形状を示す。
【図36】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図37】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図38】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図39】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図40】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図41】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図42】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図43】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図44】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図45】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図46】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
【図47】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、いわゆる軌道ノードを示す番号を伴う図35の汎用形状から導出される基本軌道形状を含む。
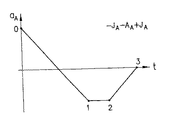
【図48】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、中止軌道用に対応する形状を示す。
【図49】
本発明による各アームの制約が同一でないデュアルアームカエル足ロボットの半径方向移動用の代表的な時間最適軌道の形状を示し、特に、中止軌道用に対応する形状を示す。
【図50a】
合成された軌道を示し、ポイント「0」から「1」までと、ポイント「1」から「2」までとの2つの直線セグメントからなる典型的な連続した移動用のパスを示す。
【図50b】
合成された軌道を示し、ポイント「0」から「1」までの直線と、「1」から「2」までの円弧とに沿った典型的な連続した移動を示す。
【図51a】
ポイント「0」から「1」までとポイント「1」から「2」までとの2つの直線セグメントに従う丸い基板を示す2つの直線移動を合成する典型的な軌道を示し、順次実行させた例である。
【図51b】
ポイント「0」から「1」までとポイント「1」から「2」までとの2つの直線セグメントに従う丸い基板を示す2つの直線移動を合成する典型的な軌道を示し、複合移動を示し、基板の中心は、実際にはポイント1を通過せず、示された円滑パスに従うものである。
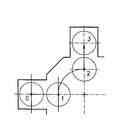
【図52a】
直線、すなわちポイント「0」から「1」までと、「2」から「3」までのセグメントに沿う2つの移動と、円弧、すなわちポイント「1」から「2」までのセグメントに沿った移動とを合成する典型的な軌道を示し、各セグメントを追従する円形基板を示し、移動を連続させた場合であり、従来例による移動路を表す。
【図52b】
直線、すなわちポイント「0」から「1」までと、「2」から「3」までのセグメントに沿う2つの移動と、円弧、すなわちポイント「1」から「2」までのセグメントに沿った移動とを合成する典型的な軌道を示し、各セグメントを追従する丸い基板を示し、複合移動の場合を示し、本発明による複合移動を受ける円形基板用の最適搬送路を示す。
【図53】
加速度プロファイル、加速度対時間のグラフを示し、本発明による加速度プロファイルと、従来の反復法により得られた加速度プロファイルとの比較を示し、特に、加速度制約が有効の(エンドエフェクタがロードされた)場合の半径方向の伸長を伴うシングルアームロボット用の事例を示す。
【図54】
加速度プロファイル、加速度対時間のグラフを示し、本発明による加速度プロファイルと、従来の反復法により得られた加速度プロファイルとの比較を示し、特に、一方のエンドエフェクタAの加速度制約が有効であり(ロードされ)、且つ他方のエンドエフェクタBの加速度制約が非活動の(アンロードされる)ときの半径方向伸長のデュアルアームカエル足ロボット用の事例を示す。
【図55】
加速度プロファイル、加速度対時間のグラフを示し、本発明による加速度プロファイルと、従来の反復法により得られた加速度プロファイルとの比較を示し、特に、一方のエンドエフェクタAの加速度制約が非活動であり(アンロードされる)、且つ他方のエンドエフェクタBでの加速度制約が有効の(ロードされた)場合の、半径方向に伸長するデュアルアームカエル足ロボット用の事例を示す。
【図56】
加速度プロファイル、加速度対時間のグラフを示し、本発明による加速度プロファイルと、従来の反復法により得られた加速度プロファイルとの比較を示し、特に、エンドエフェクタA,Bでの半径方向伸長及び加速度制約が有効でない(アンロードされる)場合の半径方向に伸長するデュアルアームカエル足ロボット用の事例を示す。
【図57】
加速度プロファイル、加速度対時間のグラフを示し、本発明による加速度プロファイルと、従来の反復法により得られた加速度プロファイルとの比較を示し、特に、加速度制約が有効の場合(少なくとも1つのエンドエフェクタがロードされる)の回転移動用の事例を示す。
【図58】
加速度プロファイル、加速度対時間のグラフを示し、本発明による加速度プロファイルと、従来の反復法により得られた加速度プロファイルとの比較を示し、特に、加速度制約が非活動の(エンドエフェクタがアンロードされる)回転移動用の事例を示す。
Claims (12)
- ロボットマニピュレータのアーム動作について連続加速度プロファイルを有して制約を伴う時間最適軌道を信頼性高く且つ数的に効率良く生成して、搬送路に沿った時間最適アーム動作を生成する方法であって、
前記方法は、
一組の基本軌道形状を設定する工程を含み、前記一組の基本軌道形状は、前記アーム動作の始点から前記アーム動作の終点まで搬送路に沿った所定の種類の前記アーム動作に対する所定の一組の制約条件に対応した時間最適加速度プロファイルであり、前記時間最適加速度プロファイルは時系列的にセグメントを接続することにより構成され、当該セグメントの各々においては最大速度、最大加速度、最大ジャーク、最大ジャーク変化率、全加速度若しくは接線方向ジャークの1つの制約条件が有効であり、前記一組の基本軌道形状は、前記搬送路に適用可能な全ての制約条件が含まれるように接続されたセグメントで構成された汎用軌道形状から設定され、前記一組の基本軌道形状の各基本軌道形状は前記汎用軌道形状の制約条件の幾つかを含んでおり、
前記方法は更に、
基本軌道形状の各々に付随する一組の条件を判断し、基本軌道形状の各々に関する前記所定の一組の制約条件に付随する前記一組の条件に基づいて前記基本軌道形状が特定のアーム動作に使用するのに選択できるか否かを判断する判断工程と、
前記選択された基本軌道形状の各基本軌道形状を複数のセグメントに分解する工程と、を含み、前記セグメントの各々では単一の制約条件が有効であり、
前記方法は更に、
前記選択された基本軌道形状の複数のセグメントの各々に対して前記時間最適路を求める工程と、
前記選択された基本軌道形状の前記複数のセグメントについての前記時間最適路を所定時間間隔で軌道の搬送路に組み合わせる工程とを含み、前記所定時間間隔において当該軌道の搬送路は前記一組の条件に基づき前記選択された基本軌道形状を用いて前記搬送路に沿った時間最適アーム動作を形成することを特徴とする方法。 - 前記アーム動作はシングルアームロボットのものであり、前記搬送路は直線であり、前記一組の制約条件は、最大速度、最大加速度、最大ジャーク及び最大ジャーク変化率であることを特徴とする請求項1記載の方法。
- 前記アーム動作はシングルアームロボットのものであり、前記搬送路は円弧であり、前記一組の制約条件は、最大速度、全加速度及び接線方向ジャークからなることを特徴とする請求項1記載の方法。
- 前記アーム動作は、エンドエフェクタA及びエンドエフェクタBを備えるデュアルアームロボットのものであり、前記搬送路は半径方向移動からなり、前記一組の制約条件は、エンドエフェクタAの最大速度、最大加速度、最大ジャーク及び最大ジャーク変化率、エンドエフェクタBの最大加速度からなることを特徴とする請求項1記載の方法。
- 前記アーム動作は、エンドエフェクタA及びエンドエフェクタBを備えるデュアルアームロボットのものであり、前記搬送路は半径方向移動からなり、前記一組の制約条件は、前記エンドエフェクタAの最大ジャーク及び最大加速度と、前記エンドエフェクタBの最大加速度を含むことを特徴とする請求項1記載の方法。
- 前記アーム動作は、デュアルアームロボットのものであり、前記搬送路は回転移動を有し、前記一組の制約条件は、最大速度、全加速度及び接線方向ジャークを含むことを特徴とする請求項1記載の方法。
- 前記搬送路は、直線及び円弧を含むことを特徴とする請求項1記載の方法。
- 前記ロボットマニピュレータにはエンドエフェクタが設けられており、前記一組の制約条件は、前記ロボットマニピュレータのエンドエフェクタの中心に与えられる、最大速度、最大加速度、最大ジャーク及び最大ジャーク変化率を含むことを特徴とする請求項1記載の方法。
- 前記加速度プロファイルは、
前記ロボットマニピュレータが搬送路に沿って開始ポイントから最終ポイントまでの設定距離を移動するために必要な時間を最小にすることと、
エンドエフェクタと当該エンドエフェクタにて支持される基板との間の保持力を越える慣性力を生じさせる加速度を避けることと、
により決定されることを特徴とする請求項1記載の方法。 - 前記複数のセグメントを、合成された経路に沿ったノンストップ移動のための合成軌道に合成する合成工程を更に含み、
前記複数のセグメントの各々は独立した軌道成分を形成しており、
前記合成工程は、
前記独立した軌道成分を所定期間毎に重畳する工程と、
重畳させた成分を、前記合成された経路に沿ったノンストップ移動のための合成軌道に合成する工程と、
からなることを特徴とする請求項1記載の方法。 - 前記独立した軌道成分は、互いに直交し、直交座標系のx、y軸方向成分によって示されることを特徴とする請求項10記載の方法。
- 前記独立した軌道成分は直線及び円弧を含むことを特徴とする請求項10記載の方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/322,858 US6216058B1 (en) | 1999-05-28 | 1999-05-28 | System of trajectory planning for robotic manipulators based on pre-defined time-optimum trajectory shapes |
| US09/322,858 | 1999-05-28 | ||
| PCT/US2000/013362 WO2000073967A1 (en) | 1999-05-28 | 2000-05-15 | Robotic manipulators based on pre-defined time-optimum trajectory shape |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012172529A Division JP6240377B2 (ja) | 1999-05-28 | 2012-08-03 | 時間最適アーム動作を生成する装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2003507195A JP2003507195A (ja) | 2003-02-25 |
| JP2003507195A5 JP2003507195A5 (ja) | 2011-11-17 |
| JP5550201B2 true JP5550201B2 (ja) | 2014-07-16 |
Family
ID=23256746
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001500199A Expired - Lifetime JP5550201B2 (ja) | 1999-05-28 | 2000-05-15 | 時間最適アーム動作を生成する方法 |
| JP2012172529A Expired - Lifetime JP6240377B2 (ja) | 1999-05-28 | 2012-08-03 | 時間最適アーム動作を生成する装置 |
| JP2016201355A Expired - Lifetime JP6587355B2 (ja) | 1999-05-28 | 2016-10-12 | 時間最適アーム動作を生成する装置 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012172529A Expired - Lifetime JP6240377B2 (ja) | 1999-05-28 | 2012-08-03 | 時間最適アーム動作を生成する装置 |
| JP2016201355A Expired - Lifetime JP6587355B2 (ja) | 1999-05-28 | 2016-10-12 | 時間最適アーム動作を生成する装置 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US6216058B1 (ja) |
| EP (1) | EP1232464A4 (ja) |
| JP (3) | JP5550201B2 (ja) |
| KR (1) | KR100640019B1 (ja) |
| CN (1) | CN1240016C (ja) |
| AU (1) | AU5017800A (ja) |
| TW (1) | TW448092B (ja) |
| WO (1) | WO2000073967A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108687758A (zh) * | 2017-04-11 | 2018-10-23 | 日本电产三协株式会社 | 机器人的移动速度控制装置及方法 |
Families Citing this family (83)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19836835C2 (de) * | 1998-08-13 | 2002-04-11 | Richard Herbst | Kunststoff-Spritzgießmaschine sowie Verfahren zum Steuern einer solchen |
| US6216058B1 (en) * | 1999-05-28 | 2001-04-10 | Brooks Automation, Inc. | System of trajectory planning for robotic manipulators based on pre-defined time-optimum trajectory shapes |
| US6567711B1 (en) * | 2000-08-28 | 2003-05-20 | Brooks Automation | Observer-corrector control system for systems with unmodeled dynamics |
| JP4364634B2 (ja) | 2001-07-13 | 2009-11-18 | ブルックス オートメーション インコーポレイテッド | 二次元3自由度ロボットアームの軌道プラニング及び移動制御戦略 |
| US9855657B2 (en) * | 2003-01-31 | 2018-01-02 | Thermo Crs Ltd. | Syntactic inferential motion planning method for robotic systems |
| WO2004095520A2 (en) * | 2003-04-22 | 2004-11-04 | Berkeley Process Control, Inc. | System of path planning for robotic manipulators based on maximum acceleration and finite jerk constraints |
| DE10321970A1 (de) * | 2003-05-15 | 2004-12-09 | Siemens Ag | Verfahren zur Bewegungsführung eines bewegbaren Maschinenelementes einer numerisch gesteuerten Werkzeug-oder Produktionsmaschine |
| US20040236453A1 (en) * | 2003-05-22 | 2004-11-25 | Gabor Szoboszlay | Method and apparatus for combining and generating trajectories |
| SE0303145D0 (sv) * | 2003-11-23 | 2003-11-23 | Abb Research Ltd | Method for optimising the performance of a robot |
| US7016019B2 (en) * | 2003-12-16 | 2006-03-21 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| US7927062B2 (en) * | 2005-11-21 | 2011-04-19 | Applied Materials, Inc. | Methods and apparatus for transferring substrates during electronic device manufacturing |
| US8084706B2 (en) * | 2006-07-20 | 2011-12-27 | Gsi Group Corporation | System and method for laser processing at non-constant velocities |
| DE102007037037B3 (de) * | 2007-08-06 | 2009-02-12 | Mtu Friedrichshafen Gmbh | Verfahren zur Regelung einer Brennkraftmaschine |
| US7784723B2 (en) | 2007-09-11 | 2010-08-31 | Deepflex Inc. | Layered tape guide spool and alignment device and method |
| US7919940B2 (en) * | 2007-10-21 | 2011-04-05 | Ge Intelligent Platforms, Inc. | System and method for jerk limited trajectory planning for a path planner |
| DE102008029657A1 (de) * | 2008-06-24 | 2009-12-31 | Technische Universität Carolo-Wilhelmina Zu Braunschweig | Positionsgesteuerter Mechanismus und Verfahren zur Steuerung von in mehreren Bewegungsfreiheitsgraden beweglichen Mechanismen |
| US8024069B2 (en) * | 2009-01-28 | 2011-09-20 | Ge Intelligent Platforms, Inc. | System and method for path planning |
| JP5504641B2 (ja) * | 2009-02-13 | 2014-05-28 | 株式会社安川電機 | 基板搬送用ロボット及びそれを備えた基板搬送装置、半導体製造装置 |
| DE102009023307A1 (de) * | 2009-05-29 | 2010-12-02 | Kuka Roboter Gmbh | Verfahren und Vorrichtung zur Steuerung eines Manipulators |
| US20110153080A1 (en) * | 2009-12-22 | 2011-06-23 | Siemens Product Lifecycle Management Software Inc. | Method and apparatus for industrial robotic pathscycle time optimization using fly by |
| JP5404519B2 (ja) * | 2010-04-26 | 2014-02-05 | 本田技研工業株式会社 | ロボット、制御システムおよび制御プログラム |
| EP2644334B1 (en) * | 2010-11-26 | 2019-02-20 | Rorze Corporation | Robot control device and control method |
| CN102554938B (zh) * | 2010-12-31 | 2014-12-03 | 北京中科广视科技有限公司 | 机器人的机械手末端轨迹跟踪方法 |
| CN102298395B (zh) * | 2011-05-31 | 2014-04-16 | 深圳华强数码电影有限公司 | 一种跟踪控制方法和系统 |
| KR101876380B1 (ko) * | 2011-07-06 | 2018-07-11 | 삼성전자주식회사 | 매니퓰레이터 및 그 경로 생성 방법 |
| US8700190B2 (en) | 2011-08-05 | 2014-04-15 | Mitsubishi Electric Research Labs. | Method for generating trajectories for motor controlled actuators |
| KR102080812B1 (ko) * | 2011-09-02 | 2020-02-24 | 브룩스 오토메이션 인코퍼레이티드 | 로봇 이송 장비들을 위한 시간 최적화 궤적들 |
| US8874258B2 (en) | 2011-09-13 | 2014-10-28 | Persimmon Technologies Corporation | Method for transporting a substrate with a substrate support |
| DE102011122434B4 (de) | 2011-12-24 | 2019-07-04 | Robert Bosch Gmbh | Verfahren zur Steuerung einer Bewegung von mechanischen Vorrichtungen unter Verwendung nacheinander interpolierter Verfahrsätze |
| JP6021478B2 (ja) * | 2012-07-05 | 2016-11-09 | キヤノン株式会社 | ロボット制御装置、及びロボット制御方法 |
| JP6128767B2 (ja) * | 2012-07-05 | 2017-05-17 | キヤノン株式会社 | ロボット制御装置、及びロボット制御方法 |
| US9056394B2 (en) | 2012-09-27 | 2015-06-16 | Siemens Product Lifecycle Management Software Inc. | Methods and systems for determining efficient robot-base position |
| SG11201503120PA (en) * | 2012-10-22 | 2015-05-28 | Güdel Group AG | Method for the determination of workpiece transport trajectories in a multiple station press |
| CN103853043B (zh) * | 2012-11-30 | 2017-02-22 | 北京配天技术有限公司 | 机器人中实现同步ptp运动的方法及装置 |
| US8700307B1 (en) * | 2013-03-04 | 2014-04-15 | Mitsubishi Electric Research Laboratories, Inc. | Method for determining trajectories manipulators to avoid obstacles |
| US9649765B2 (en) | 2013-03-11 | 2017-05-16 | Siemens Aktiengesellschaft | Reducing energy consumption of industrial robots by using new methods for motion path programming |
| US9242376B2 (en) * | 2013-03-28 | 2016-01-26 | Denso Wave Incorporated | Method of generating path of multiaxial robot and control apparatus for the multiaxial robot |
| JP2014233774A (ja) * | 2013-05-31 | 2014-12-15 | 株式会社荏原製作所 | ロボットアーム制御装置、基板搬送装置、基板処理装置、ロボットアーム制御方法およびプログラム |
| CN103353761B (zh) * | 2013-07-12 | 2016-01-20 | 北京配天技术有限公司 | 机器人连续加工方法、装置及平滑转接方法、装置 |
| CN103353737B (zh) * | 2013-07-12 | 2016-08-10 | 北京配天技术有限公司 | 机器人连续加工方法、装置及平滑转接方法、装置 |
| US9076337B2 (en) * | 2013-09-19 | 2015-07-07 | Mitsubishi Electric Research Laboratories, Inc. | Method for determining trajectory of multi-motor control system avoiding obstacle |
| DE102014103370B4 (de) * | 2014-03-12 | 2017-08-24 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren und Vorrichtung zur zeitdiskreten Steuerung eines Manipulators |
| US9922144B2 (en) | 2014-03-26 | 2018-03-20 | Siemens Industry Software Ltd. | Energy and cycle time efficiency based method for robot positioning |
| US9701011B2 (en) | 2014-05-08 | 2017-07-11 | Siemens Industry Software Ltd. | Method for robotic energy saving tool search |
| DE102015205631A1 (de) | 2014-06-05 | 2015-06-03 | Heidelberger Druckmaschinen Ag | Verfahren zum automatisierten Bedrucken einer gekrümmten Oberfläche eines dreidimensionalen Objekts |
| CN104008250B (zh) * | 2014-06-10 | 2016-01-20 | 广东工业大学 | 基于主频能量时域最优分布的非对称变加速度规划方法 |
| US9298863B2 (en) | 2014-07-31 | 2016-03-29 | Siemens Industry Software Ltd. | Method and apparatus for saving energy and reducing cycle time by using optimal robotic joint configurations |
| US9815201B2 (en) | 2014-07-31 | 2017-11-14 | Siemens Industry Software Limited | Method and apparatus for industrial robotic energy saving optimization using fly-by |
| US9469029B2 (en) | 2014-07-31 | 2016-10-18 | Siemens Industry Software Ltd. | Method and apparatus for saving energy and reducing cycle time by optimal ordering of the industrial robotic path |
| JP5908544B2 (ja) * | 2014-08-11 | 2016-04-26 | ファナック株式会社 | 駆動軸のジャークを低下させるロボットプログラムを生成するロボットプログラム生成装置 |
| US9457469B2 (en) * | 2014-08-14 | 2016-10-04 | Siemens Industry Software Ltd. | Method and apparatus for automatic and efficient location generation for cooperative motion |
| CN105500361B (zh) * | 2014-09-23 | 2017-07-11 | 上海通用汽车有限公司 | 一种连杆结构机械手的运动控制方法及系统 |
| CN104570735B (zh) * | 2014-12-23 | 2017-03-15 | 佛山市湘德智能科技有限公司 | 一种码垛机器人弧形运动轨迹算法 |
| DE102015103452B4 (de) * | 2015-03-10 | 2022-06-02 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren zum zeitdiskreten Anhalten antreibbarer Achsen, Computerprogrammprodukt und Vorrichtung zur Durchführung eines derartigen Verfahrens |
| JP6126152B2 (ja) | 2015-03-16 | 2017-05-10 | ファナック株式会社 | 曲線部を有する軌道を生成するロボットの軌道生成装置 |
| DE102015106227B3 (de) * | 2015-04-22 | 2016-05-19 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Steuern und/oder Regeln von Motoren eines Roboters |
| DE102015215347A1 (de) * | 2015-08-12 | 2017-02-16 | Krones Aktiengesellschaft | Verfahren zum Bewegen mindestens einer für den Umgang mit Stückgütern ausgebildeten Handhabungseinrichtung, Vorrichtung zum Umgang mit Stückgütern und bestimmte Arbeitsbahn für eine Handhabungseinrichtung |
| WO2017090186A1 (ja) * | 2015-11-27 | 2017-06-01 | 株式会社日立国際電気 | 基板処理装置 |
| US10456103B2 (en) | 2016-06-14 | 2019-10-29 | Shanghai United Imaging Healthcare Co., Ltd. | Unified trajectory generation process and system |
| CN105922265B (zh) * | 2016-06-20 | 2018-08-24 | 广州视源电子科技股份有限公司 | 一种机械臂的运动轨迹规划方法、装置及机器人 |
| US10580681B2 (en) * | 2016-07-10 | 2020-03-03 | Yaskawa America Inc. | Robotic apparatus and method for transport of a workpiece |
| EP3484396B1 (en) | 2016-07-14 | 2023-02-15 | Intuitive Surgical Operations, Inc. | Automatic manipulator assembly deployment for draping |
| DE102016224564A1 (de) * | 2016-12-09 | 2018-06-14 | Robert Bosch Gmbh | Verfahren zum Bereitstellen einer Bewegungskontur für einen Manipulator |
| CN106671110A (zh) * | 2017-02-10 | 2017-05-17 | 苏州库浩斯信息科技有限公司 | 一种机器人头部行程控制方法及其系统 |
| CN107030695B (zh) * | 2017-04-19 | 2019-07-09 | 广州视源电子科技股份有限公司 | 机器人返回原点运动控制方法和系统 |
| CN107030697B (zh) * | 2017-04-28 | 2019-05-28 | 广州大学 | 一种机器人笛卡尔空间平滑轨迹的规划方法 |
| CN107943034B (zh) * | 2017-11-23 | 2020-08-04 | 南开大学 | 移动机器人沿给定路径的完备且最短时间轨迹规划方法 |
| DE102017011334A1 (de) * | 2017-12-08 | 2019-06-13 | Kuka Deutschland Gmbh | Abfahren einer vorgegebenen Arbeitsbahn mit einem Roboter |
| WO2019127443A1 (en) | 2017-12-29 | 2019-07-04 | Shenzhen United Imaging Healthcare Co., Ltd. | System and method for synchronous motion optimization of device with moving components |
| CN108262747B (zh) * | 2018-01-16 | 2021-07-13 | 广州视源电子科技股份有限公司 | 运动轨迹规划方法、装置、机器人及存储介质 |
| DE102018203078B3 (de) * | 2018-03-01 | 2019-05-09 | Kuka Deutschland Gmbh | Verfahren zum automatischen Erzeugen einer Bewegungstrajektorie und zugehöriges Computerprogrammprodukt |
| CN108748138A (zh) * | 2018-04-17 | 2018-11-06 | 上海达野智能科技有限公司 | 速度规划方法、系统、控制系统、机器人、及存储介质 |
| EP3784448A1 (en) | 2018-04-25 | 2021-03-03 | ABB Schweiz AG | Method and control system for controlling movement trajectories of a robot |
| EP3817897A1 (en) * | 2018-07-04 | 2021-05-12 | ABB Schweiz AG | Method and control system for controlling an industrial actuator |
| CA3131004A1 (en) * | 2019-03-19 | 2020-09-24 | Quest Integrated, Llc | Indoors positioning and navigation systems and methods |
| EP3725472A1 (de) * | 2019-04-16 | 2020-10-21 | Siemens Aktiengesellschaft | Verfahren zum ermitteln einer trajektorie eines roboters |
| CN110221538B (zh) * | 2019-04-26 | 2021-10-01 | 华南理工大学 | 一种结合迭代学习的时间最优轨迹规划控制器及方法 |
| GB2584677B (en) * | 2019-06-10 | 2023-02-15 | Glowbuzzer Ltd | Method and apparatus for trajectory-planning |
| EP3880413B1 (en) | 2019-10-03 | 2023-10-04 | Mitsubishi Electric Corporation | Method and system for trajectory optimization for vehicles with geometric constraints |
| US11707843B2 (en) * | 2020-04-03 | 2023-07-25 | Fanuc Corporation | Initial reference generation for robot optimization motion planning |
| CN111665851B (zh) * | 2020-06-30 | 2022-02-11 | 哈工大机器人(合肥)国际创新研究院 | 一种动态调整机器人运行速度的轨迹规划方法及装置 |
| AT525225B1 (de) * | 2021-07-09 | 2023-10-15 | Stiwa Ams Gmbh | Verfahren und Vorrichtung zur Bestimmung einer zeitoptimalen Trajektorie |
| CN115592675B (zh) * | 2022-12-01 | 2023-09-12 | 今麦郎饮品股份有限公司 | 一种基于移动式饮品制备机械臂的控制系统 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2656433C3 (de) * | 1976-12-14 | 1983-11-17 | Fraunhofer-Gesellschaft Zur Foerderung Der Angewandten Forschung E.V., 8000 Muenchen | Verfahren und Anordnung zur Regelung von Manipulatoen und industriellen Robotern |
| JPS60220408A (ja) * | 1984-04-18 | 1985-11-05 | Hitachi Ltd | 関節形ロボツト用制御装置 |
| JPH0743605B2 (ja) * | 1985-03-20 | 1995-05-15 | 日本鋼管株式会社 | サーボ機構の円弧軌道生成法 |
| EP0268491A3 (en) * | 1986-11-20 | 1988-08-03 | Unimation Inc. | Multiaxis robot having improved motion control |
| JPH01173209A (ja) * | 1987-12-28 | 1989-07-07 | Nitto Seiko Co Ltd | 産業用ロボットの制御方法 |
| JP3182542B2 (ja) * | 1993-03-27 | 2001-07-03 | 豊田工機株式会社 | ロボット制御装置 |
| US5331264A (en) * | 1993-04-15 | 1994-07-19 | Fanuc Robotics North America, Inc. | Method and device for generating an input command for a motion control system |
| US5373221A (en) * | 1993-07-30 | 1994-12-13 | Fanuc Robotics North America, Inc. | Method and system for estimating robot tool center point speed |
| US5434489A (en) * | 1993-07-30 | 1995-07-18 | Fanuc Robotics North America, Inc. | Method and system for path planning in cartesian space |
| JPH07146704A (ja) * | 1993-11-25 | 1995-06-06 | Nippon Telegr & Teleph Corp <Ntt> | 速度教示方法 |
| US5602968A (en) * | 1994-05-02 | 1997-02-11 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Task space angular velocity blending for real-time trajectory generation |
| JPH0825258A (ja) * | 1994-07-08 | 1996-01-30 | Nitto Kohki Co Ltd | 荷役機械の制御方法 |
| JPH08234823A (ja) * | 1995-02-28 | 1996-09-13 | Sony Corp | 数値制御装置およびその方法 |
| US5655060A (en) * | 1995-03-31 | 1997-08-05 | Brooks Automation | Time optimal trajectory for cluster tool robots |
| US5647724A (en) * | 1995-10-27 | 1997-07-15 | Brooks Automation Inc. | Substrate transport apparatus with dual substrate holders |
| WO1997034742A1 (fr) * | 1996-03-18 | 1997-09-25 | Komatsu Ltd. | Dispositif de commande d'un systeme de transport de pieces |
| WO1998010340A1 (en) * | 1996-09-02 | 1998-03-12 | Philips Electronics N.V. | Control by means of a set-point generator |
| JPH10124132A (ja) * | 1996-10-21 | 1998-05-15 | Tokico Ltd | ロボット制御装置及びロボット |
| US6216058B1 (en) * | 1999-05-28 | 2001-04-10 | Brooks Automation, Inc. | System of trajectory planning for robotic manipulators based on pre-defined time-optimum trajectory shapes |
| JP5438702B2 (ja) * | 2011-02-17 | 2014-03-12 | 住友ゴム工業株式会社 | コンプレッサ装置 |
-
1999
- 1999-05-28 US US09/322,858 patent/US6216058B1/en not_active Expired - Lifetime
-
2000
- 2000-05-15 EP EP00932457A patent/EP1232464A4/en not_active Withdrawn
- 2000-05-15 JP JP2001500199A patent/JP5550201B2/ja not_active Expired - Lifetime
- 2000-05-15 AU AU50178/00A patent/AU5017800A/en not_active Abandoned
- 2000-05-15 KR KR1020017015297A patent/KR100640019B1/ko active IP Right Grant
- 2000-05-15 CN CNB008108129A patent/CN1240016C/zh not_active Expired - Lifetime
- 2000-05-15 WO PCT/US2000/013362 patent/WO2000073967A1/en active Application Filing
- 2000-05-23 TW TW089109885A patent/TW448092B/zh not_active IP Right Cessation
-
2012
- 2012-08-03 JP JP2012172529A patent/JP6240377B2/ja not_active Expired - Lifetime
-
2016
- 2016-10-12 JP JP2016201355A patent/JP6587355B2/ja not_active Expired - Lifetime
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108687758A (zh) * | 2017-04-11 | 2018-10-23 | 日本电产三协株式会社 | 机器人的移动速度控制装置及方法 |
| CN108687758B (zh) * | 2017-04-11 | 2022-04-05 | 日本电产三协株式会社 | 机器人的移动速度控制装置及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1240016C (zh) | 2006-02-01 |
| AU5017800A (en) | 2000-12-18 |
| EP1232464A1 (en) | 2002-08-21 |
| KR20020072493A (ko) | 2002-09-16 |
| JP2003507195A (ja) | 2003-02-25 |
| KR100640019B1 (ko) | 2006-10-30 |
| TW448092B (en) | 2001-08-01 |
| US6216058B1 (en) | 2001-04-10 |
| JP2017035782A (ja) | 2017-02-16 |
| JP6240377B2 (ja) | 2017-11-29 |
| EP1232464A4 (en) | 2007-12-26 |
| WO2000073967A1 (en) | 2000-12-07 |
| CN1399762A (zh) | 2003-02-26 |
| JP2012232410A (ja) | 2012-11-29 |
| JP6587355B2 (ja) | 2019-10-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6587355B2 (ja) | 時間最適アーム動作を生成する装置 | |
| KR100377973B1 (ko) | 클러스터 툴 로봇용 시간 최적 궤도 | |
| US6643563B2 (en) | Trajectory planning and motion control strategies for a planar three-degree-of-freedom robotic arm | |
| KR20020010522A (ko) | 로봇들의 자동 교정을 위한 방법 및 장치 | |
| JP2007168053A (ja) | 垂直多関節型ロボットのティーチング方法および産業用ロボット装置 | |
| CN110914020B (zh) | 具有机器人的操纵装置以及方法和计算机程序 | |
| Hassan et al. | Time-optimal pick-and-throw S-curve trajectories for fast parallel robots | |
| Bazaz et al. | Online computing of a robotic manipulator joint trajectory with velocity and acceleration constraints | |
| Tangpattanakul et al. | Optimal trajectory of robot manipulator using harmony search algorithms | |
| Schappler et al. | Resolution of functional redundancy for 3T2R robot tasks using two sets of reciprocal Euler angles | |
| Chang et al. | Online approximate Cartesian path trajectory planning for robotic manipulators | |
| Shih et al. | Collision avoidance for two SCARA robots | |
| Hosek | Time-Optimum Trajectories for Robots with Multiple End-Effectors | |
| JP7478777B2 (ja) | ロボットシステム、ワーク管理システム、ロボット制御方法、およびワーク管理プログラム | |
| JPH11198072A (ja) | ロボットの最短時間速度制御装置 | |
| JPH07256580A (ja) | 複腕協調制御装置 | |
| JP3668821B2 (ja) | ロボットコントローラおよびロボット制御方法 | |
| US7363092B2 (en) | Multi-joint robot and control device thereof | |
| Cao et al. | Task-oriented redundancy resolution and obstacle avoidance for kinematically redundant robots | |
| JP2001277160A (ja) | ロボットの経路生成方法 | |
| Ren et al. | Comparison of control approaches for tracking control of a 3 dof parallel robot: experimental results | |
| Yasuda et al. | Experiments with a parallel robot with singularity-perturbed design | |
| Gueta et al. | Design of the end-effector tool attachment for robot arm with multiple reconfigurable goals | |
| JPS6160447B2 (ja) | ||
| Krishnasamy et al. | Application of optimal trajectory algorithms to a solar-panel handling industrial manipulator: a case study |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070508 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100302 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20100526 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20100602 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100902 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110329 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20110627 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20110704 |
|
| A524 | Written submission of copy of amendment under section 19 (pct) |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20110929 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120403 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120803 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120803 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20120924 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20121228 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130919 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130925 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131024 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131029 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20131121 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20131126 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20131225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140520 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5550201 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |