JP5309552B2 - 電子線トモグラフィ法及び電子線トモグラフィ装置 - Google Patents
電子線トモグラフィ法及び電子線トモグラフィ装置 Download PDFInfo
- Publication number
- JP5309552B2 JP5309552B2 JP2007330320A JP2007330320A JP5309552B2 JP 5309552 B2 JP5309552 B2 JP 5309552B2 JP 2007330320 A JP2007330320 A JP 2007330320A JP 2007330320 A JP2007330320 A JP 2007330320A JP 5309552 B2 JP5309552 B2 JP 5309552B2
- Authority
- JP
- Japan
- Prior art keywords
- electron beam
- image
- sample
- electron microscope
- electron
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Description
馬場則男、「電子線トモグラフィ再構成の原理」、顕微鏡、社団法人日本顕微鏡学会、平成16年、第39巻、第1号、p.4−10
以下、図1を参照しつつ、本発明の実施形態に係る電子線トモグラフィ装置10について説明する。ここに、図1は、本発明の実施形態に係る電子線トモグラフィ装置の構成を示すブロック図である。
以下、図2乃至図5を参照しつつ、本発明の実施形態に係る電子線トモグラフィ装置10に使用する試料3、支持膜5及び試料ホルダ6について説明する。ここに、図2は、試料ホルダの一例を示す斜視図である。図3は、試料の運搬及び試料ホルダへの固定のために使用する支持膜の一例を示す斜視図である。図4は、実施形態に係る試料及び単結晶並びに照射電子線の様子を示す模式図である。図5(a)は、支持膜上に取り付けた試料の一例を示す走査電子顕微鏡像を示す図であり、図5(b)は、図5(a)に示す試料を収束イオンビームにより薄層化したものを撮像した走査透過電子顕微鏡像を示す図である。
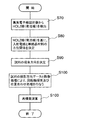
以下、図6を参照しつつ、本発明の実施形態に係る電子線トモグラフィ法の走査透過電子顕微鏡像及び収束電子線回折像の取得手順について説明する。ここに、図6は、実施形態に係る電子線トモグラフィ法において、一連の電子顕微鏡画像及び電子線散乱像を取得する手順を示すフロー図である。
以下、図7及び図8を参照しつつ、本発明の実施形態に係る電子線トモグラフィ法の画像データの処理手順について説明する。ここに、図7は、実施形態に係る電子線トモグラフィ法のデータ解析手順を示すフロー図である。図8は、シリコン単結晶に収束電子線を照射したときに観察されるHOLZ線の角度依存性を計算により求めた結果を示す図である。
上記の実施形態では、評価部位3a及び単結晶部位3bを1軸周りに回転させて、走査電子顕微鏡像及び収束電子線回折像を取得していたが、本発明はこれに限定されるものではなく、試料を2軸又は3軸周りに回転させて走査電子顕微鏡像及び収束電子線回折像を取得する構成としてもよい。これにより、走査透過電子顕微鏡像を取得できる角度領域が増大し、情報欠落領域を減少させることができる。
Claims (6)
- 構造を評価すべき評価部位と、前記評価部位と一体的に結合した単結晶部位とを有する試料に対し複数の角度から電子線を照射して一連の透過電子線による画像を取得し、これらの画像に基づいて前記評価部位の立体構造を再構築する電子線トモグラフィ法であって、
前記評価部位に前記電子線を照射して透過電子顕微鏡像を取得すると共に前記電子線の照射角度を変化させずに前記単結晶部位に前記電子線を照射して電子線回折像を取得する操作をそれぞれの角度毎に行うことにより、一連の前記透過電子顕微鏡像及び前記電子線回折像を取得する工程と、
前記電子線回折像から前記試料への前記電子線の入射方位を求めて前記透過電子顕微鏡像の各々についての投影方向を決定する工程と、
前記透過電子顕微鏡像の各々についての投影方向の情報を用いて、一連の前記透過電子顕微鏡像の位置合わせを行い、前記評価部位の立体構造を再構築する工程と、
を有することを特徴とする電子線トモグラフィ法。 - 前記電子線回折像は、前記結晶部位に局所的に収束させた電子線を照射したときに観測される収束電子線回折像であることを特徴とする請求項1に記載の電子線トモグラフィ法。
- 前記試料への前記電子線の入射方位の決定は、前記収束電子線回折像に現れるHOLZ線又は菊池線のパターンを検出することにより行うことを特徴とする請求項2に記載の電子線トモグラフィ法。
- 前記透過電子顕微鏡像は、平行な電子ビームを前記評価部位全体に同時に照射して撮影を行う透過電子顕微鏡像であることを特徴とする請求項1に記載の電子線トモグラフィ法。
- 前記透過電子顕微鏡像は、局所的に収束させた電子ビームを前記評価部位上を走査させて取得する走査透過電子顕微鏡像であることを特徴とする請求項1に記載の電子線トモグラフィ法。
- 構造を評価すべき評価部位と、前記評価部位と一体的に結合した単結晶部位とを有する試料に電子線を照射する電子線照射装置と、
前記試料を保持すると共に、前記試料を少なくとも1軸周りに回転させて前記試料への前記電子線の照射角度を変化させることができる試料保持部材と、
前記試料からの透過電子顕微鏡像及び電子線回折像を検出する検出器と、
前記電子線照射装置、前記試料保持部材、及び前記検出器を制御して、前記評価部位に前記電子線を照射して透過電子顕微鏡像を取得すると共に前記電子線の照射角度を変化させずに前記単結晶部位に前記電子線を照射して電子線回折像を取得する操作を複数の角度で行うことにより、一連の透過電子顕微鏡像及び一連の電子線回折像を取得し、前記電子線回折像から前記透過電子顕微鏡像の各々についての投影方向を決定し、その投影方向の情報を用いて前記一連の透過電子顕微鏡像の位置合わせを行い前記評価部位の立体構造を再構築する制御装置と、
を備えたことを特徴とする電子線トモグラフィ装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007330320A JP5309552B2 (ja) | 2007-12-21 | 2007-12-21 | 電子線トモグラフィ法及び電子線トモグラフィ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007330320A JP5309552B2 (ja) | 2007-12-21 | 2007-12-21 | 電子線トモグラフィ法及び電子線トモグラフィ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009152120A JP2009152120A (ja) | 2009-07-09 |
| JP5309552B2 true JP5309552B2 (ja) | 2013-10-09 |
Family
ID=40921008
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007330320A Expired - Fee Related JP5309552B2 (ja) | 2007-12-21 | 2007-12-21 | 電子線トモグラフィ法及び電子線トモグラフィ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5309552B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015072609A1 (ko) * | 2013-11-18 | 2015-05-21 | 한국지질자원연구원 | 전자 단층촬영을 이용한 다공성 지오폴리머의 3차원 측정방법 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5339368B2 (ja) * | 2009-09-18 | 2013-11-13 | 独立行政法人産業技術総合研究所 | 電子顕微鏡における三次元像構築画像処理方法 |
| JP5670096B2 (ja) * | 2009-11-17 | 2015-02-18 | 日本電子株式会社 | トモグラフィー法を用いた試料の3次元画像取得方法及び装置 |
| JP5292326B2 (ja) * | 2010-01-29 | 2013-09-18 | 株式会社日立ハイテクノロジーズ | 標準試料作成方法、および標準試料 |
| JP5321918B2 (ja) * | 2010-06-15 | 2013-10-23 | 独立行政法人産業技術総合研究所 | 電子顕微鏡用試料作製方法 |
| JP5331780B2 (ja) * | 2010-11-30 | 2013-10-30 | 株式会社日立ハイテクノロジーズ | 電子顕微鏡,電子顕微鏡用画像再構成システム、および電子顕微鏡用画像再構成方法 |
| JP2014082134A (ja) * | 2012-10-17 | 2014-05-08 | Fujitsu Ltd | 電子装置及び電子線を照射する方法 |
| KR101543417B1 (ko) | 2013-11-29 | 2015-08-10 | 한국해양과학기술원 | 전자―토모그래피에서 이미지 정렬의 정확도 향상 방법 |
| JP5703404B2 (ja) * | 2014-03-07 | 2015-04-22 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置及び荷電粒子線を用いた測長方法 |
| KR102724079B1 (ko) | 2019-05-20 | 2024-10-29 | 엘디코 사이언티픽 아게 | 하전 입자 결정학을 위한 회절계 |
| JP7693426B2 (ja) * | 2021-07-12 | 2025-06-17 | キオクシア株式会社 | 解析方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03246861A (ja) * | 1990-02-23 | 1991-11-05 | Nec Corp | 透過型電子顕微鏡 |
| JP3422045B2 (ja) * | 1993-06-21 | 2003-06-30 | 株式会社日立製作所 | 組成及び格子歪測定用電子顕微鏡及びその観察方法 |
| JP3304681B2 (ja) * | 1995-04-25 | 2002-07-22 | 株式会社日立製作所 | 電子顕微鏡及び3次元原子配列観察方法 |
| JPH09213253A (ja) * | 1996-01-31 | 1997-08-15 | Ricoh Co Ltd | 電子線回折による非晶質材料の構造解析方法 |
| JPH10214587A (ja) * | 1997-01-30 | 1998-08-11 | Hitachi Ltd | 立体観察用走査透過電子顕微鏡及び立体画像形成システム |
| JP3984521B2 (ja) * | 2002-09-20 | 2007-10-03 | 松下電器産業株式会社 | 透過型電子顕微鏡による観察方法 |
| JP2005019218A (ja) * | 2003-06-26 | 2005-01-20 | Jeol Ltd | 電子顕微鏡装置 |
-
2007
- 2007-12-21 JP JP2007330320A patent/JP5309552B2/ja not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015072609A1 (ko) * | 2013-11-18 | 2015-05-21 | 한국지질자원연구원 | 전자 단층촬영을 이용한 다공성 지오폴리머의 3차원 측정방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2009152120A (ja) | 2009-07-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5309552B2 (ja) | 電子線トモグラフィ法及び電子線トモグラフィ装置 | |
| US7863564B2 (en) | Electric charged particle beam microscope and microscopy | |
| US9202671B2 (en) | Charged particle beam apparatus and sample processing method using charged particle beam apparatus | |
| JP5296413B2 (ja) | 複合荷電粒子ビーム装置を用いた断面画像取得方法および複合荷電粒子ビーム装置 | |
| CN106370680B (zh) | 用于tem/stem层析成像倾斜系列采集和对准的基准形成 | |
| JP2003014667A (ja) | 電子線を用いた観察装置及び観察方法 | |
| US20070023651A1 (en) | Methods for sample preparation and observation, charged particle apparatus | |
| JP2008270056A (ja) | 走査型透過電子顕微鏡 | |
| JP2012013703A (ja) | 電子回折断層撮影の方法 | |
| US12362135B2 (en) | Method and system for automatic zone axis alignment | |
| EP4067886A1 (en) | Method and system to determine crystal structure | |
| WO2017104186A1 (ja) | Ebsd検出装置 | |
| US10541108B2 (en) | Method and apparatus for transmission electron microscopy | |
| JP3304681B2 (ja) | 電子顕微鏡及び3次元原子配列観察方法 | |
| JP7527282B2 (ja) | 分子の構造および配座を決定するための電子回折イメージングシステム | |
| JP2011204367A (ja) | 電子顕微鏡用試料台 | |
| US20230377836A1 (en) | Analysis System | |
| CN208420756U (zh) | 一种成像系统 | |
| JP7304098B2 (ja) | 立体像観察方法及びこれに用いる試料グリッド | |
| JP2022155554A (ja) | 三次元電子回折データを取得するための方法およびシステム | |
| JP4845452B2 (ja) | 試料観察方法、及び荷電粒子線装置 | |
| JP2021043073A (ja) | 誤差算出装置、荷電粒子線装置、誤差算出方法およびプログラム | |
| WO2019038917A1 (ja) | 較正用試料、それを用いた電子ビーム調整方法及び電子ビーム装置 | |
| JP2003317654A (ja) | 電子顕微方法及びそれを用いた電子顕微鏡並び生体試料検査方法及び生体検査装置 | |
| JP2653084B2 (ja) | 表面分析装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100820 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120620 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120626 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130604 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130617 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |