JP6393448B2 - Tem/stemトモグラフィ連続傾斜の取得および位置合せのための基準マーク形成 - Google Patents
Tem/stemトモグラフィ連続傾斜の取得および位置合せのための基準マーク形成 Download PDFInfo
- Publication number
- JP6393448B2 JP6393448B2 JP2016140965A JP2016140965A JP6393448B2 JP 6393448 B2 JP6393448 B2 JP 6393448B2 JP 2016140965 A JP2016140965 A JP 2016140965A JP 2016140965 A JP2016140965 A JP 2016140965A JP 6393448 B2 JP6393448 B2 JP 6393448B2
- Authority
- JP
- Japan
- Prior art keywords
- sample
- pillar
- reference hole
- tomographic
- tomographic data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003325 tomography Methods 0.000 title claims description 47
- 230000015572 biosynthetic process Effects 0.000 title description 8
- 238000000034 method Methods 0.000 claims description 163
- 230000008569 process Effects 0.000 claims description 77
- 239000002245 particle Substances 0.000 claims description 53
- 238000010884 ion-beam technique Methods 0.000 claims description 38
- 238000004458 analytical method Methods 0.000 claims description 9
- 238000010894 electron beam technology Methods 0.000 claims description 8
- 230000005540 biological transmission Effects 0.000 claims description 7
- 238000011835 investigation Methods 0.000 claims description 5
- 238000007493 shaping process Methods 0.000 claims description 5
- 238000011065 in-situ storage Methods 0.000 claims description 4
- 239000000523 sample Substances 0.000 description 265
- 238000004627 transmission electron microscopy Methods 0.000 description 35
- 230000003287 optical effect Effects 0.000 description 17
- 239000000758 substrate Substances 0.000 description 17
- 238000003801 milling Methods 0.000 description 15
- 238000010586 diagram Methods 0.000 description 13
- 238000001350 scanning transmission electron microscopy Methods 0.000 description 11
- 239000000463 material Substances 0.000 description 8
- 230000008901 benefit Effects 0.000 description 7
- 238000012937 correction Methods 0.000 description 6
- 239000010410 layer Substances 0.000 description 6
- 230000033001 locomotion Effects 0.000 description 6
- 239000004065 semiconductor Substances 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 5
- 230000003252 repetitive effect Effects 0.000 description 5
- 230000009977 dual effect Effects 0.000 description 4
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 4
- 229910052737 gold Inorganic materials 0.000 description 4
- 239000010931 gold Substances 0.000 description 4
- 238000012800 visualization Methods 0.000 description 4
- 238000002372 labelling Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 239000000203 mixture Substances 0.000 description 3
- 238000000992 sputter etching Methods 0.000 description 3
- 238000003466 welding Methods 0.000 description 3
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 2
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 239000013590 bulk material Substances 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 230000000875 corresponding effect Effects 0.000 description 2
- 238000000151 deposition Methods 0.000 description 2
- 230000008021 deposition Effects 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 238000000386 microscopy Methods 0.000 description 2
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical group [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 2
- 238000005498 polishing Methods 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- BLRBOMBBUUGKFU-SREVYHEPSA-N (z)-4-[[4-(4-chlorophenyl)-5-(2-methoxy-2-oxoethyl)-1,3-thiazol-2-yl]amino]-4-oxobut-2-enoic acid Chemical compound S1C(NC(=O)\C=C/C(O)=O)=NC(C=2C=CC(Cl)=CC=2)=C1CC(=O)OC BLRBOMBBUUGKFU-SREVYHEPSA-N 0.000 description 1
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- 241001634884 Cochlicopa lubricella Species 0.000 description 1
- GYHNNYVSQQEPJS-UHFFFAOYSA-N Gallium Chemical compound [Ga] GYHNNYVSQQEPJS-UHFFFAOYSA-N 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 229910052786 argon Inorganic materials 0.000 description 1
- 239000012472 biological sample Substances 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000000356 contaminant Substances 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000013499 data model Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005430 electron energy loss spectroscopy Methods 0.000 description 1
- 238000001493 electron microscopy Methods 0.000 description 1
- 238000000313 electron-beam-induced deposition Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 229910052733 gallium Inorganic materials 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 229910052500 inorganic mineral Inorganic materials 0.000 description 1
- 238000007737 ion beam deposition Methods 0.000 description 1
- 238000001888 ion beam-induced deposition Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 238000001000 micrograph Methods 0.000 description 1
- 239000011707 mineral Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 229910003446 platinum oxide Inorganic materials 0.000 description 1
- 239000011253 protective coating Substances 0.000 description 1
- 239000011241 protective layer Substances 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 235000012239 silicon dioxide Nutrition 0.000 description 1
- 239000000377 silicon dioxide Substances 0.000 description 1
- 241000894007 species Species 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- YLJREFDVOIBQDA-UHFFFAOYSA-N tacrine Chemical compound C1=CC=C2C(N)=C(CCCC3)C3=NC2=C1 YLJREFDVOIBQDA-UHFFFAOYSA-N 0.000 description 1
- 229960001685 tacrine Drugs 0.000 description 1
- 231100000027 toxicology Toxicity 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- DZKDPOPGYFUOGI-UHFFFAOYSA-N tungsten dioxide Inorganic materials O=[W]=O DZKDPOPGYFUOGI-UHFFFAOYSA-N 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 238000007794 visualization technique Methods 0.000 description 1
- 229910052724 xenon Inorganic materials 0.000 description 1
- FHNFHKCVQCLJFQ-UHFFFAOYSA-N xenon atom Chemical compound [Xe] FHNFHKCVQCLJFQ-UHFFFAOYSA-N 0.000 description 1
Images

















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/22—Optical, image processing or photographic arrangements associated with the tube
- H01J37/222—Image processing arrangements associated with the tube
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/22—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by measuring secondary emission from the material
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/28—Electron or ion microscopes; Electron or ion diffraction tubes with scanning beams
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/02—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material
- G01N23/04—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material and forming images of the material
- G01N23/046—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material and forming images of the material using tomography, e.g. computed tomography [CT]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N1/00—Sampling; Preparing specimens for investigation
- G01N1/28—Preparing specimens for investigation including physical details of (bio-)chemical methods covered elsewhere, e.g. G01N33/50, C12Q
- G01N1/32—Polishing; Etching
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/22—Treatment of data
- H01J2237/226—Image reconstruction
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/26—Electron or ion microscopes
- H01J2237/2611—Stereoscopic measurements and/or imaging
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/26—Electron or ion microscopes
- H01J2237/28—Scanning microscopes
- H01J2237/2802—Transmission microscopes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/26—Electron or ion microscopes
- H01J2237/282—Determination of microscope properties
- H01J2237/2826—Calibration
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/304—Controlling tubes
- H01J2237/30433—System calibration
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/30—Electron or ion beam tubes for processing objects
- H01J2237/304—Controlling tubes
- H01J2237/30433—System calibration
- H01J2237/30438—Registration
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/30—Electron-beam or ion-beam tubes for localised treatment of objects
- H01J37/304—Controlling tubes by information coming from the objects or from the beam, e.g. correction signals
- H01J37/3045—Object or beam position registration
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Immunology (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Pulmonology (AREA)
- Radiology & Medical Imaging (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Sampling And Sample Adjustment (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
Description
試料を、トモグラフィ用のピラー形に整形するために、1つまたは複数の荷電粒子ビームを試料に導くことと、
試料内に第1の基準穴を作製するために、試料を第1の位置に配置すること、および前記荷電粒子ビームのうちの1つの荷電粒子ビームをドウェル動作モードで試料に導くことと、
第1の基準穴を作製した後に、試料を、一連のトモグラフィ・データ走査のために配置することと、
試料の一連のトモグラフィ・データ走査を実施することと、
トモグラフィ・データ走査における第1の基準穴の位置に基づいて、トモグラフィ・データ走査におけるトモグラフィ・データの正確さを改善することと
を含む方法を提供する。
トモグラフィによって調査するための円錐形またはピラー形の試料を提供することと、
第1の基準マークを作製するために、荷電粒子ビーム・システム内において試料を第1の位置に配置すること、および、試料に荷電粒子ビームを導くことと、
第1の基準マークを作製した後に、一連のトモグラフィ・データ走査のために試料を顕微鏡内に配置することと、
顕微鏡を用いて試料の一連のトモグラフィ・データ走査を実施することと、
トモグラフィ・データ走査における第1の基準マークの位置に基づいて、トモグラフィ・データ取得におけるデータの位置合せをすることと
を含む方法を提供する。
ピラー形試料を提供することと、
ピラー形試料を形成した後に、ピラー形試料上に基準マークを形成することと、
顕微鏡を用いて試料の一連のトモグラフィ・データ走査を実施することと、
トモグラフィ・データ走査における基準マークの位置に基づいて、トモグラフィ・データ走査におけるデータの位置合せをすることと
を含む方法。
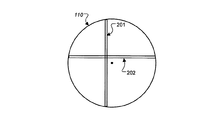
201 第1の基準穴
202 第2の基準穴
203 第3の基準穴
204 第4の基準穴
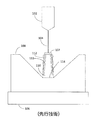
220 ピラーの長手方向軸
510 回転試料ホルダ(傾斜試料ホルダ)
Claims (25)
- ピラー形試料のトモグラフィ分析の方法であって、
(a)試料を、トモグラフィ用のピラー形に整形するために、1つまたは複数の荷電粒子ビームを前記試料に導くことと、
(b)前記試料内に第1の基準穴を作製するために、前記試料を第1の位置に配置すること、および前記荷電粒子ビームのうちの1つの荷電粒子ビームを、前記荷電粒子ビームを動かさずに保持する、ドウェル動作モードで前記試料に導くことと、
(c)前記第1の基準穴を作製した後に、前記試料を、一連の傾斜のトモグラフィ・データ走査のために配置することと、
(d)前記試料の一連の傾斜のトモグラフィ・データ走査を実施することと、
(e)前記トモグラフィ・データ走査における前記第1の基準穴の位置に基づいて、前記トモグラフィ・データ走査から得られたトモグラフィ・データの正確さを改善することと
を含む方法。 - 前記試料内に第2の基準穴を作製するために、前記試料を第2の位置に配置すること、および前記荷電粒子ビームのうちの1つの荷電粒子ビームを前記試料に導くことをさらに含み、前記トモグラフィ・データ走査における前記第1および第2の基準穴の位置に基づいて、前記トモグラフィ・データの正確さを改善する、請求項1に記載の方法。
- トモグラフィ用に前記試料を整形することが、関心領域を含む試料ピラーを前記試料内に形成するために集束イオン・ビームを使用することを含み、前記第1および第2の基準穴が前記関心領域の外側に配置され、前記方法がさらに、前記試料を第3の位置に配置することと、前記荷電粒子ビームのうちの1つの荷電粒子ビームを用いて第3の基準穴を作製することと、前記試料を第4の位置に配置することと、前記荷電粒子ビームのうちの1つの荷電粒子ビームを用いて第4の基準穴を作製することとを含み、前記第3および第4の基準穴が、前記第1および第2の基準穴とは反対側の前記関心領域の外側に配置される、請求項2に記載の方法。
- 前記第1の基準穴と前記第2の基準穴の向きが直交方向である、請求項2に記載の方法。
- 前記第1の基準穴の作製が、前記一連の傾斜のトモグラフィ・データ走査を実施する透過電子顕微鏡内において原位置で実行される、請求項1に記載の方法。
- 前記第1の基準穴が、傾斜トモグラフィ・ホルダ内に前記試料を保持して形成され、前記一連の傾斜のトモグラフィ・データ走査が、透過電子顕微鏡によって前記傾斜試料ホルダ内で実行される、請求項1に記載の方法。
- 前記第1の基準穴の作製が、第1の方向に沿って前記試料の少なくとも半分まで達する第1の穴の作製を含む、請求項1に記載の方法。
- 前記試料内に第2の基準穴を作製するために、前記試料を第2の位置に配置すること、および、前記荷電粒子ビームのうちの1つの荷電粒子ビームを前記試料に導くことをさらに含み、前記第1および第2の穴が、それらの穴のそれぞれの方向に前記試料を完全に貫通する、請求項7に記載の方法。
- 前記第1の穴と前記第2の穴が共通の平面に沿って形成される、請求項8に記載の方法。
- トモグラフィ用の前記試料を整形することが、関心領域を含む試料ピラーを前記試料内に形成するために、集束イオン・ビームを使用することを含み、前記一連の傾斜のトモグラフィ・データ走査が、前記ピラー形の長手方向軸を軸にして前記試料を傾け、透過電子顕微鏡を用いて、前記ピラー形の長手方向軸に対してほぼ直角に走査することによって実施される、請求項1に記載の方法。
- 前記トモグラフィ・データの正確さを改善することが、データ群の位置合せを、相互相関位置合せだけに依存して改善するために前記第1の基準穴を識別することにより、トモグラフィ再構成を改善することを含む、請求項1に記載の方法。
- 前記トモグラフィ・データの正確さを改善することが、前記一連の傾斜のトモグラフィ・データ走査のうちの連続するトモグラフィ・データ走査において前記試料を配置する間に、前記第1の基準穴を識別することを含む、請求項1に記載の方法。
- 前記トモグラフィ・データの正確さを改善することが、前記トモグラフィ・データ群の位置合せ中に、前記第1の基準穴を、特徴部分追跡技法のための目標物として識別することを含む、請求項1に記載の方法。
- 試料を分析する方法であって、
(a)トモグラフィによって調査するための円錐形またはピラー形の試料を提供することと、
(b)第1の基準穴を前記試料内に作製するために、荷電粒子ビーム・システム内において前記試料を第1の位置に配置すること、および、前記試料に荷電粒子ビームを導くことと、
(c)前記第1の基準穴を作製した後に、一連の傾斜のトモグラフィ・データ走査のために前記試料を顕微鏡内に配置することと、
(d)前記顕微鏡を用いて前記試料の一連の傾斜のトモグラフィ・データ走査を実施することと、
(e)前記トモグラフィ・データ走査における前記第1の基準穴の位置に基づいて、前記トモグラフィ・データ走査から得られたデータの位置合せをすることと
を含む方法。 - 第1の基準穴を作製するために前記試料に荷電粒子ビームを導くことが、前記試料に向かって電子ビームを導くことを含む、請求項14に記載の方法。
- 前記顕微鏡を用いて前記試料の一連の傾斜のトモグラフィ・データ走査を実施することが、電子顕微鏡を用いて前記試料の一連の傾斜のトモグラフィ・データ走査を実施することを含む、請求項15に記載の方法。
- 第2の基準穴を作製するために、前記荷電粒子ビーム・システム内において前記試料を第2の位置に配置すること、および、前記試料に前記荷電粒子ビームを導くことをさらに含み、前記トモグラフィ・データの正確さを改善することが、前記第2の基準穴の位置にも基づく、請求項14に記載の方法。
- 前記試料が、関心領域を含む太さ200nm未満のピラーであり、前記第1および第2の基準穴が、前記関心領域の第1の端部の近くに提供された穴であり、前記方法がさらに、前記第1の端部の反対側の前記関心領域の第2の端部の近くに、前記試料を貫通する第3および第4の基準穴を形成することを含み、前記トモグラフィ・データの正確さを改善することが、前記第3および第4の基準穴の位置にも基づく、請求項17に記載の方法。
- 前記試料が円筒ピラー形に形成され、前記一連の傾斜のトモグラフィ・データ走査が、前記ピラー形の長手方向軸を軸にして前記試料を傾け、前記顕微鏡を用いて、前記ピラー形の長手方向軸に対してほぼ直角に走査することによって実施される、請求項14に記載の方法。
- 前記トモグラフィ・データからのデータの位置合せをすることが、前記第1の基準穴を、再構成プロセスの位置合せ手順中に特徴部分追跡アルゴリズムを用いて追跡する特徴部分として識別することにより、トモグラフィ再構成を改善することを含む、請求項14に記載の方法。
- 前記試料をより良好に配置するために、前記一連の傾斜のトモグラフィ・データ走査の連続する走査のために前記試料を配置する間に、前記第1の基準穴を識別することをさらに含む、請求項14に記載の方法。
- トモグラフィを形成する方法であって、
ピラー形試料を提供することと、
前記ピラー形試料を形成した後に、前記ピラー形試料内に基準穴を形成することと、
顕微鏡を用いて前記試料の一連の傾斜のトモグラフィ・データ走査を実施することと、
前記トモグラフィ・データ走査における前記基準穴の位置に基づいて、前記トモグラフィ・データ走査におけるデータの位置合せをすることと
を含む方法。 - 前記ピラー形試料内に基準穴を形成することが、荷電粒子ビームを使用して前記ピラー内に穴を形成することを含む、請求項22に記載の方法。
- 前記トモグラフィ・データ走査におけるデータの位置合せをすることが、所定のレベル内の走査の位置合せをすることを含む、請求項22に記載の方法。
- 前記トモグラフィ・データ走査におけるデータの位置合せをすることが、異なるレベルからの画像の位置合せをすることを含む、請求項22に記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562196246P | 2015-07-23 | 2015-07-23 | |
| US62/196,246 | 2015-07-23 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017026612A JP2017026612A (ja) | 2017-02-02 |
| JP2017026612A5 JP2017026612A5 (ja) | 2017-08-24 |
| JP6393448B2 true JP6393448B2 (ja) | 2018-09-19 |
Family
ID=57836148
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016140965A Active JP6393448B2 (ja) | 2015-07-23 | 2016-07-18 | Tem/stemトモグラフィ連続傾斜の取得および位置合せのための基準マーク形成 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9627176B2 (ja) |
| EP (1) | EP3121834A1 (ja) |
| JP (1) | JP6393448B2 (ja) |
| CN (1) | CN106370680B (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017212020B3 (de) * | 2017-07-13 | 2018-05-30 | Carl Zeiss Microscopy Gmbh | Verfahren zur In-situ-Präparation und zum Transfer mikroskopischer Proben, Computerprogrammprodukt sowie mikroskopische Probe |
| JP7154531B2 (ja) * | 2018-03-22 | 2022-10-18 | 国立大学法人東北大学 | 電子デバイスの評価方法および評価装置 |
| US10695844B2 (en) | 2018-06-17 | 2020-06-30 | Arevo, Inc. | Registration of articles of manufacture with dimensional variations |
| CN112903733B (zh) * | 2021-01-25 | 2022-07-29 | 中国科学院广州地球化学研究所 | 一种透射电镜能谱超分辨分析方法 |
| US20220254060A1 (en) * | 2021-02-09 | 2022-08-11 | Fei Company | 3d fiducial for precision 3d nand channel tilt/shift analysis |
| US11476079B1 (en) * | 2021-03-31 | 2022-10-18 | Fei Company | Method and system for imaging a multi-pillar sample |
| CN117553723B (zh) * | 2024-01-12 | 2024-04-23 | 中铁大桥局集团有限公司 | 一种基于三维扫描技术的预埋件装配板孔群的定位方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7442924B2 (en) | 2005-02-23 | 2008-10-28 | Fei, Company | Repetitive circumferential milling for sample preparation |
| US7312448B2 (en) | 2005-04-06 | 2007-12-25 | Carl Zeiss Nts Gmbh | Method and apparatus for quantitative three-dimensional reconstruction in scanning electron microscopy |
| US7884326B2 (en) | 2007-01-22 | 2011-02-08 | Fei Company | Manipulator for rotating and translating a sample holder |
| JP5268324B2 (ja) * | 2007-10-29 | 2013-08-21 | 株式会社日立ハイテクノロジーズ | 荷電粒子線顕微装置及び顕微方法 |
| TWI372859B (en) * | 2008-10-03 | 2012-09-21 | Inotera Memories Inc | Method for manufacturing an electron tomography specimen with fiducial markers and method for constructing 3d image |
| JP5321918B2 (ja) * | 2010-06-15 | 2013-10-23 | 独立行政法人産業技術総合研究所 | 電子顕微鏡用試料作製方法 |
| EP2402976A1 (en) | 2010-06-30 | 2012-01-04 | Fei Company | Method of electron diffraction tomography |
| EP2708874A1 (en) | 2012-09-12 | 2014-03-19 | Fei Company | Method of performing tomographic imaging of a sample in a charged-particle microscope |
| EP2738786A1 (en) | 2012-11-29 | 2014-06-04 | Fei Company | Method of performing tomographic imaging of a sample in a charged-particle microscope |
| CN105264635B (zh) * | 2012-12-31 | 2018-11-20 | Fei 公司 | 用于利用带电粒子束的倾斜或掠射研磨操作的基准设计 |
| EP2811288B1 (en) | 2013-06-06 | 2016-08-10 | Fei Company | Method for electron tomography |
| EP2916342A1 (en) | 2014-03-05 | 2015-09-09 | Fei Company | Fabrication of a lamella for correlative atomic-resolution tomographic analyses |
-
2016
- 2016-01-06 US US14/989,419 patent/US9627176B2/en active Active
- 2016-03-04 EP EP16158607.8A patent/EP3121834A1/en not_active Withdrawn
- 2016-07-18 JP JP2016140965A patent/JP6393448B2/ja active Active
- 2016-07-22 CN CN201610806416.1A patent/CN106370680B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20170025246A1 (en) | 2017-01-26 |
| EP3121834A1 (en) | 2017-01-25 |
| CN106370680A (zh) | 2017-02-01 |
| JP2017026612A (ja) | 2017-02-02 |
| CN106370680B (zh) | 2019-04-23 |
| US9627176B2 (en) | 2017-04-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6393448B2 (ja) | Tem/stemトモグラフィ連続傾斜の取得および位置合せのための基準マーク形成 | |
| JP5296413B2 (ja) | 複合荷電粒子ビーム装置を用いた断面画像取得方法および複合荷電粒子ビーム装置 | |
| KR102579329B1 (ko) | Cad 지원 tem 샘플 제작 레시피 생성 | |
| US8476588B2 (en) | Method of electron diffraction tomography | |
| KR20160119840A (ko) | 시료에 따른 전자 회절 패턴 분석을 수행하는 방법 | |
| JP5309552B2 (ja) | 電子線トモグラフィ法及び電子線トモグラフィ装置 | |
| US9659743B2 (en) | Image creating method and imaging system for performing the same | |
| US9514913B2 (en) | TEM sample mounting geometry | |
| US9488554B2 (en) | Method and system for reducing curtaining in charged particle beam sample preparation | |
| JP4433092B2 (ja) | 三次元構造観察方法 | |
| JP2005520279A (ja) | 走査型計測装置の較正のための方法と装置 | |
| US10937625B2 (en) | Method of imaging a sample using an electron microscope | |
| JP3677895B2 (ja) | 3次元構造観察用試料作製装置、電子顕微鏡及びその方法 | |
| JP2020064780A (ja) | 荷電粒子ビーム装置、試料加工観察方法 | |
| US9947506B2 (en) | Sample holder and focused ion beam apparatus | |
| JP4393352B2 (ja) | 電子顕微鏡 | |
| JP4988175B2 (ja) | 荷電粒子装置用試料台 | |
| Ritter et al. | SEM/FIB stage calibration with photogrammetric methods | |
| WO2020100179A1 (ja) | 画像形成方法及び画像形成システム | |
| JP5939627B2 (ja) | 電子顕微鏡用試料、電子顕微鏡画像形成方法及び電子顕微鏡装置 | |
| JP4845452B2 (ja) | 試料観察方法、及び荷電粒子線装置 | |
| JP4232848B2 (ja) | 3次元構造観察用試料作製装置、電子顕微鏡及びその方法 | |
| JP2004301852A (ja) | 3次元構造観察用試料作製装置、電子顕微鏡及びその方法 | |
| JP2008262921A (ja) | 3次元構造観察用試料作製装置、電子顕微鏡及びその方法 | |
| WO2024211063A1 (en) | Novel flow for high resolution stereoscopic measurements |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170714 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170714 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20170714 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20170824 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170905 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180123 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180422 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180611 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180814 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180825 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6393448 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |