JP5147943B2 - 電動パワーステアリング装置、及び制御装置一体型電動機 - Google Patents
電動パワーステアリング装置、及び制御装置一体型電動機 Download PDFInfo
- Publication number
- JP5147943B2 JP5147943B2 JP2010520711A JP2010520711A JP5147943B2 JP 5147943 B2 JP5147943 B2 JP 5147943B2 JP 2010520711 A JP2010520711 A JP 2010520711A JP 2010520711 A JP2010520711 A JP 2010520711A JP 5147943 B2 JP5147943 B2 JP 5147943B2
- Authority
- JP
- Japan
- Prior art keywords
- power
- electric motor
- phase
- semiconductor switch
- reduction mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000004065 semiconductor Substances 0.000 claims description 92
- 238000004804 winding Methods 0.000 claims description 88
- 230000009467 reduction Effects 0.000 claims description 84
- 230000007246 mechanism Effects 0.000 claims description 79
- 239000000758 substrate Substances 0.000 claims description 33
- 229910052751 metal Inorganic materials 0.000 claims description 14
- 239000002184 metal Substances 0.000 claims description 14
- 230000002093 peripheral effect Effects 0.000 description 14
- 239000003990 capacitor Substances 0.000 description 7
- 238000001514 detection method Methods 0.000 description 7
- 229910000838 Al alloy Inorganic materials 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 239000000919 ceramic Substances 0.000 description 5
- 230000006866 deterioration Effects 0.000 description 5
- 230000001681 protective effect Effects 0.000 description 5
- 230000001360 synchronised effect Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000000694 effects Effects 0.000 description 4
- 230000017525 heat dissipation Effects 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 206010000117 Abnormal behaviour Diseases 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 239000003822 epoxy resin Substances 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 229920000647 polyepoxide Polymers 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 230000000116 mitigating effect Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0403—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box
- B62D5/0406—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box including housing for electronic control unit
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
- H02K7/1163—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears where at least two gears have non-parallel axes without having orbital motion
- H02K7/1166—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears where at least two gears have non-parallel axes without having orbital motion comprising worm and worm-wheel
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Steering Mechanism (AREA)
- Cooling Or The Like Of Electrical Apparatus (AREA)
Description
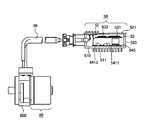
以下、この発明の実施の形態1による電動パワーステアリング装置、及び制御装置一体型電動機について詳細に説明する。図1は、この発明の実施の形態1による電動パワーステアリング装置を示す断面図、図2は、その電動パワーステアリング装置に於ける制御装置一体型電動機を示す断面図である。この実施の形態1に於いて、制御装置一体型電動機は、永久磁石型同期電動機として構成されている。
前述の実施の形態1に於いては、パワー素子及び半導体スイッチ素子を実装してパワー基板は電動機部のU相、V相、W相の各相毎に3分割されており、これらは電動機部の回転子軸の周りに放射状に配置され、又、電動機部の制御装置と外部のバッテリーとの導通を遮断するための半導体スイッチ素子を実装したスイッチ基板は、パワー基板から離れた位置に配置されていたが、実施の形態2に於いては、U相、V相、W相の全ての相のパワー素子、及び電動機内の導通を遮断する半導体スイッチ素子、及び電動機外部との導通を遮断するための半導体スイッチ素子の全てを1枚のパワー基板に実装したものである。
次に、この発明の実施の形態3による電動パワーステアリング装置、及び制御装置一体型電動機について説明する。図7はこの発明の実施の形態3による電動パワーステアリング装置に於ける制御装置一体型電動機の断面図、図8は、その制御装置部を、制御基板を取り除いた状態で示す平面図である。この実施の形態3に於いて、制御装置一体型電動機は、永久磁石型同期電動機として構成されている。
次に、この発明の実施の形態4による電動パワーステアリング装置について説明する。図9は、この発明の実施の形態4による電動パワーステアリング制御を示す構成図で、その制御装置部を断面にて示している。この実施の形態4に於いて、電動機は、永久磁石型同期電動機として構成されている。
次に、この発明の実施の形態5による電動パワーステアリング装置、及び制御装置一体型電動機について説明する。図10は、この発明の実施の形態3による電動パワーステアリング装置に於ける制御装置一体型電動機の断面図である。
尚、前述の実施の形態1、及び実施の形態2によれば、減速機構側ケース60と減速機構20とは別体としていたが、減速機構側ケース60と減速機構20のハウジング24とを一体構成としてもよい。このように構成とすることにより、パワー基板及びスイッチ基板と減速機構との間の熱伝導性がより向上し、制御装置部の電動機駆動回路と電動機外部のバッテリーとの導通を遮断する半導体スイッチ素子、電動機部内に於いて電動機駆動回路と固定子巻線との導通を遮断するスイッチ素子、及びパワー素子の放熱性をさらに良好なものとすることができる。又、減速機構側ケース60と減速機構のハウジング24とが一体に構成されるので、部品点数の削減による組み立て工数の削減、コストの低減、重量の低減等が図れるという利点がある。
Claims (4)
- 車両の運転者によりハンドルを介してステアリング軸に加えられる操舵トルクを検出し、この検出した操舵トルクに対応したアシストトルクを減速機構を介して電動機により前記ステアリング軸に加えるようにした電動パワーステアリング装置であって、
半導体からなる複数個のパワー素子により構成され、前記電動機の電機子巻線に供給する電力を制御する電動機駆動回路と、
前記電動機駆動回路の入力端子と外部の電源との間を開閉するスイッチ装置と、
前記電機子巻線を開閉するスイッチ装置と、
を備え、
前記両スイッチ装置のうちの少なくとも一方は半導体スイッチ素子により構成され、
前記パワー素子と前記半導体スイッチ素子とは、金属製のケースに装着された基板に実装され、
前記電機子巻線は、3相交流巻線により構成され、
前記電動機駆動回路は、前記複数個のパワー素子により構成された3相ブリッジ回路により構成され、
前記複数個のパワー素子は、前記3相ブリッジ回路の同一相のアームを構成する単位毎に夫々異なる基板に実装され、
前記夫々のパワー素子を実装する夫々の基板は、前記電動機の回転子軸の軸心の周りに放射状に均等に配置され、
前記半導体スイッチ素子を実装した基板は、前記パワー素子を実装した2つの基板の間に配置されている、
ことを特徴とする電動パワーステアリング装置。 - 前記金属製のケースは、前記電動機と前記減速機構とを一体に連結するケースであることを特徴とする請求項1に記載の電動パワーステアリング装置。
- 車両の運転者によりハンドルを介してステアリング軸に加えられる操舵トルクを検出し、この検出した操舵トルクに対応したアシストトルクを前記ステアリング軸に加えるようにしたパワーステアリング装置に用いられ、前記アシストトルクを減速機構を介して前記ステアリング軸に加える電動機であって、 固定子と回転子と電機子巻線とを備えた電動機部と、
前記電動機部に一体に固定された制御装置部と、
を備え、
前記制御装置部は、前記電動機部の内部空間に連通する制御装置部内部空間を備えると共に前記制御装置部内部空間に半導体からなる複数個のパワー素子により構成され前記電動機の電機子巻線に供給する電力を制御する電動機駆動回路と前記電動機駆動回路の入力端子と外部の電源との間を開閉するスイッチ装置と前記電機子巻線を開閉するスイッチ装置とを収容し、
前記両スイッチ装置のうちの少なくとも一方は半導体スイッチ素子により構成され、
前記パワー素子と前記半導体スイッチ素子とは、前記電動機部の金属製のケースに装着された基板に実装され、
前記電機子巻線は3相交流巻線により構成され、
前記電動機駆動回路は、前記複数個のパワー素子により構成された3相ブリッジ回路により構成され、
前記複数個のパワー素子は、前記3相ブリッジ回路の同一相のアームを構成する単位毎に夫々異なる基板に実装され、
前記夫々のパワー素子を実装する夫々の基板は、前記電動機の回転子軸の軸心の周りに放射状に均等に配置され、
前記半導体スイッチ素子を実装した基板は、前記パワー素子を実装した2つの基板の間に配置されている、
ことを特徴とする制御装置一体型電動機。 - 前記電動機部の金属製のケースは、前記電動機部と前記減速機構とを一体に連結するケースであることを特徴とする請求項3に記載の制御装置一体型電動機。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2008/062815 WO2010007672A1 (ja) | 2008-07-16 | 2008-07-16 | 電動パワーステアリング装置、及び制御装置一体型電動機 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2010007672A1 JPWO2010007672A1 (ja) | 2012-01-05 |
| JP5147943B2 true JP5147943B2 (ja) | 2013-02-20 |
Family
ID=41550091
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010520711A Expired - Fee Related JP5147943B2 (ja) | 2008-07-16 | 2008-07-16 | 電動パワーステアリング装置、及び制御装置一体型電動機 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8924081B2 (ja) |
| EP (2) | EP2623394B1 (ja) |
| JP (1) | JP5147943B2 (ja) |
| KR (1) | KR101260577B1 (ja) |
| CN (1) | CN102026861B (ja) |
| WO (1) | WO2010007672A1 (ja) |
Families Citing this family (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5509446B2 (ja) * | 2009-08-01 | 2014-06-04 | ダイヤモンド電機株式会社 | 電動パワーステアリング用モータユニット及び電動パワーステアリング装置 |
| JP5603045B2 (ja) * | 2009-09-24 | 2014-10-08 | 三菱電機株式会社 | 電動パワーステアリング装置用モータ装置 |
| JP5039171B2 (ja) * | 2010-05-11 | 2012-10-03 | 三菱電機株式会社 | 電動式駆動装置およびその電動式駆動装置を搭載した電動式パワーステアリング装置 |
| EP2634066B1 (en) * | 2010-10-27 | 2020-03-25 | Mitsubishi Electric Corporation | Device for controlling drive of motor for electric power steering device |
| WO2012060123A1 (ja) * | 2010-11-02 | 2012-05-10 | 三菱電機株式会社 | 電動式パワーステアリング用パワーモジュールおよびこれを用いた電動式パワーステアリング駆動制御装置 |
| EP2574521B1 (en) * | 2010-12-07 | 2016-11-16 | NSK Ltd. | Electric power steering device |
| JP5711551B2 (ja) * | 2011-01-28 | 2015-05-07 | 日立オートモティブシステムズ株式会社 | モータ駆動装置 |
| US9531232B2 (en) | 2011-04-06 | 2016-12-27 | Mitsubishi Electric Corporation | Rotating electrical machine incorporating drive device |
| US9123693B2 (en) | 2011-04-07 | 2015-09-01 | Mitsubishi Electric Corporation | Mold module utilized as power unit of electric power steering apparatus and electric power steering apparatus |
| JP5619279B2 (ja) * | 2011-05-11 | 2014-11-05 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| JP5375874B2 (ja) | 2011-05-13 | 2013-12-25 | 株式会社デンソー | モータ駆動装置 |
| JP5354396B2 (ja) | 2011-05-13 | 2013-11-27 | 株式会社デンソー | モータ駆動装置 |
| JP5273573B2 (ja) | 2011-05-13 | 2013-08-28 | 株式会社デンソー | モータ駆動装置 |
| CN103548246B (zh) * | 2011-05-20 | 2016-02-10 | 三菱电机株式会社 | 驱动装置一体型旋转电机 |
| JP5500144B2 (ja) * | 2011-09-07 | 2014-05-21 | 株式会社安川電機 | 回転電機 |
| IN2014CN02465A (ja) * | 2011-09-12 | 2015-08-07 | Mitsubishi Electric Corp | |
| JP5518106B2 (ja) | 2012-01-17 | 2014-06-11 | 三菱電機株式会社 | 一体型電動パワーステアリング装置 |
| JP5518107B2 (ja) * | 2012-01-25 | 2014-06-11 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| JP5518108B2 (ja) * | 2012-01-25 | 2014-06-11 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| KR20130100411A (ko) * | 2012-03-02 | 2013-09-11 | 주식회사 만도 | 전동식 동력 보조 조향장치의 웜휠 및 그 제조방법 |
| JP5774208B2 (ja) | 2012-04-16 | 2015-09-09 | 三菱電機株式会社 | 回転電機 |
| WO2014023857A1 (es) * | 2012-08-10 | 2014-02-13 | Gomez Martinez Claudio | Mecanismo de accionamiento electromecánico para dirección asistida de un vehículo |
| JP5420040B1 (ja) * | 2012-09-13 | 2014-02-19 | 三菱電機株式会社 | 回転電機 |
| JP5554395B2 (ja) * | 2012-12-26 | 2014-07-23 | 三菱電機株式会社 | 電動過給機 |
| DE102013101084A1 (de) * | 2013-02-04 | 2014-08-07 | Cpm Compact Power Motors Gmbh | Drehfeldmaschine mit Außenläufer, insbesondere in modularer Bauweise |
| JP5595537B2 (ja) * | 2013-02-20 | 2014-09-24 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| JP5595551B1 (ja) * | 2013-04-01 | 2014-09-24 | 三菱電機株式会社 | モータ制御装置、およびモータ制御装置を備えた電動パワーステアリング装置 |
| ES2555121T3 (es) | 2013-07-08 | 2015-12-29 | Fagor, S. Coop. | Dispositivo de accionamiento eléctrico |
| CN103318248A (zh) * | 2013-07-16 | 2013-09-25 | 江苏博众汽车部件有限公司 | 一种伺服壳体 |
| JP6129676B2 (ja) * | 2013-08-05 | 2017-05-17 | 日立オートモティブシステムズ株式会社 | 車両用電動モータの制御装置及び電動パワーステアリング制御装置 |
| JP6129677B2 (ja) * | 2013-08-05 | 2017-05-17 | 日立オートモティブシステムズ株式会社 | 電動モータの駆動制御装置 |
| JP6117661B2 (ja) | 2013-09-19 | 2017-04-19 | 日立オートモティブシステムズ株式会社 | 電子制御装置 |
| KR101560980B1 (ko) * | 2014-06-23 | 2015-10-15 | 주식회사 만도 | 전동식 동력 보조 조향장치의 동력전달 장치 |
| WO2016057569A1 (en) * | 2014-10-08 | 2016-04-14 | Remy Technologies,Llc | Pedestal surface for mosfet module |
| WO2016057584A1 (en) * | 2014-10-08 | 2016-04-14 | Remy Technologies | Circuit layout for electric machine control electronics |
| JP2017017975A (ja) * | 2015-06-30 | 2017-01-19 | 株式会社豊田自動織機 | 電動コンプレッサ |
| EP3352362B1 (en) | 2015-09-18 | 2022-02-23 | Mitsubishi Electric Corporation | Integrated electric power steering apparatus |
| JP6147315B2 (ja) | 2015-11-02 | 2017-06-14 | 三菱電機株式会社 | 制御装置一体型回転電機 |
| WO2017154075A1 (ja) * | 2016-03-07 | 2017-09-14 | 三菱電機株式会社 | 電子制御装置 |
| CN107791240A (zh) * | 2016-08-31 | 2018-03-13 | 精工爱普生株式会社 | 电机单元以及机器人 |
| DE102017106311A1 (de) * | 2017-03-23 | 2018-09-27 | Atlanta Antriebssysteme E. Seidenspinner Gmbh & Co. Kg | Wechselflansch mit Sensorik für ein Getriebe |
| KR102205254B1 (ko) * | 2017-04-27 | 2021-01-21 | 현대모비스 주식회사 | 전동식 파워 스티어링 시스템의 모터 제어 장치 및 방법 |
| GB201710104D0 (en) * | 2017-06-23 | 2017-08-09 | Trw Ltd | Electric power assisted steering |
| KR102029846B1 (ko) * | 2018-05-16 | 2019-10-08 | 현대자동차 주식회사 | 구동모터 및 감속기 일체형의 구동 시스템 |
| CN110979449B (zh) * | 2019-12-20 | 2020-11-03 | 江苏鸿迅机车有限公司 | 一种电动车节能转向结构 |
| US20230085115A1 (en) * | 2020-01-27 | 2023-03-16 | Mitsubishi Electric Corporation | Drive control device for electric vehicle |
| JP7399351B2 (ja) * | 2021-04-28 | 2023-12-15 | 三菱電機株式会社 | 制御装置、駆動装置、および電動パワーステアリング装置 |
| JP7375083B2 (ja) * | 2022-03-29 | 2023-11-07 | 株式会社リケン | モータシステム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5598154U (ja) * | 1978-12-27 | 1980-07-08 | ||
| JPH11155298A (ja) * | 1997-11-20 | 1999-06-08 | Kayaba Ind Co Ltd | 電動パワーステアリング装置 |
| JP2001315654A (ja) * | 2000-05-11 | 2001-11-13 | Omron Corp | 電動パワーステアリング制御装置及びその電流特性調整装置 |
| JP2004129362A (ja) * | 2002-10-01 | 2004-04-22 | Mitsubishi Electric Corp | 電動パワーステアリング用モータ装置 |
| JP2004135492A (ja) * | 2003-08-29 | 2004-04-30 | Kayaba Ind Co Ltd | 電動パワーステアリング装置の電動モータ |
| JP3560701B2 (ja) * | 1995-07-18 | 2004-09-02 | カヤバ工業株式会社 | 電動パワーステアリング装置 |
| JP2006021645A (ja) * | 2004-07-08 | 2006-01-26 | Mitsubishi Electric Corp | 電動パワーステアリング装置 |
| JP3774624B2 (ja) * | 2000-10-18 | 2006-05-17 | 三菱電機株式会社 | 電動パワーステアリング装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0796387B2 (ja) | 1986-03-31 | 1995-10-18 | 本田技研工業株式会社 | 電動式パワーステアリング装置 |
| US5289486A (en) * | 1991-02-28 | 1994-02-22 | Omron Corporation | Semiconductor luminous element and superlattice structure |
| GB9619175D0 (en) | 1996-09-13 | 1996-10-23 | Lucas Ind Plc | Electrical power-assisted steering systems |
| JP3622362B2 (ja) * | 1996-09-19 | 2005-02-23 | 株式会社デンソー | 電動式パワーステアリング装置 |
| JP3614380B2 (ja) * | 2001-05-17 | 2005-01-26 | 三菱電機株式会社 | 電動式パワーステアリング装置 |
| US6889792B1 (en) * | 2002-08-01 | 2005-05-10 | Trw Inc. | Electrically assisted power steering system with anti-theft capability |
| JP4409313B2 (ja) * | 2004-02-24 | 2010-02-03 | 株式会社デンソー | ブラシレスモータ駆動装置 |
| JP2004345643A (ja) | 2004-08-24 | 2004-12-09 | Mitsubishi Electric Corp | 電動式パワーステアリング回路装置 |
| JP4319112B2 (ja) * | 2004-08-27 | 2009-08-26 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| JP4289458B2 (ja) * | 2004-09-07 | 2009-07-01 | 三菱電機株式会社 | 電動パワーステアリング制御装置 |
| JP4432709B2 (ja) * | 2004-10-01 | 2010-03-17 | トヨタ自動車株式会社 | 電動パワーステアリング装置 |
| JP4102404B2 (ja) * | 2005-11-21 | 2008-06-18 | 三菱電機株式会社 | 電動式パワーステアリング装置 |
| DE102005059162A1 (de) * | 2005-12-12 | 2007-06-21 | Robert Bosch Gmbh | Elektromotor |
| JP4402057B2 (ja) * | 2006-02-21 | 2010-01-20 | 三菱電機株式会社 | 制御装置一体型回転電機 |
| JP5058554B2 (ja) * | 2006-10-16 | 2012-10-24 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
-
2008
- 2008-07-16 JP JP2010520711A patent/JP5147943B2/ja not_active Expired - Fee Related
- 2008-07-16 EP EP13166216.5A patent/EP2623394B1/en not_active Not-in-force
- 2008-07-16 CN CN200880129222.6A patent/CN102026861B/zh not_active Expired - Fee Related
- 2008-07-16 EP EP08791210.1A patent/EP2298622B1/en not_active Not-in-force
- 2008-07-16 KR KR1020107022847A patent/KR101260577B1/ko active IP Right Grant
- 2008-07-16 WO PCT/JP2008/062815 patent/WO2010007672A1/ja active Application Filing
- 2008-07-16 US US12/992,537 patent/US8924081B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5598154U (ja) * | 1978-12-27 | 1980-07-08 | ||
| JP3560701B2 (ja) * | 1995-07-18 | 2004-09-02 | カヤバ工業株式会社 | 電動パワーステアリング装置 |
| JPH11155298A (ja) * | 1997-11-20 | 1999-06-08 | Kayaba Ind Co Ltd | 電動パワーステアリング装置 |
| JP2001315654A (ja) * | 2000-05-11 | 2001-11-13 | Omron Corp | 電動パワーステアリング制御装置及びその電流特性調整装置 |
| JP3774624B2 (ja) * | 2000-10-18 | 2006-05-17 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| JP2004129362A (ja) * | 2002-10-01 | 2004-04-22 | Mitsubishi Electric Corp | 電動パワーステアリング用モータ装置 |
| JP2004135492A (ja) * | 2003-08-29 | 2004-04-30 | Kayaba Ind Co Ltd | 電動パワーステアリング装置の電動モータ |
| JP2006021645A (ja) * | 2004-07-08 | 2006-01-26 | Mitsubishi Electric Corp | 電動パワーステアリング装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2623394B1 (en) | 2014-08-20 |
| US20110066332A1 (en) | 2011-03-17 |
| EP2298622A4 (en) | 2012-11-14 |
| US8924081B2 (en) | 2014-12-30 |
| CN102026861B (zh) | 2015-03-04 |
| JPWO2010007672A1 (ja) | 2012-01-05 |
| CN102026861A (zh) | 2011-04-20 |
| KR20100122955A (ko) | 2010-11-23 |
| EP2298622B1 (en) | 2013-12-18 |
| EP2298622A1 (en) | 2011-03-23 |
| WO2010007672A1 (ja) | 2010-01-21 |
| EP2623394A1 (en) | 2013-08-07 |
| KR101260577B1 (ko) | 2013-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5147943B2 (ja) | 電動パワーステアリング装置、及び制御装置一体型電動機 | |
| JP5496357B2 (ja) | 電動パワーステアリング用モータ駆動制御装置 | |
| JP5039171B2 (ja) | 電動式駆動装置およびその電動式駆動装置を搭載した電動式パワーステアリング装置 | |
| EP2637285B1 (en) | Electric power steering power module and electric power steering drive control device employing same | |
| JP5705306B2 (ja) | 電動パワーステアリング装置のパワー部として用いるモールドモジュール、及び電動パワーステアリング装置 | |
| JP6509359B2 (ja) | 一体型電動パワーステアリング装置、及びその製造方法 | |
| JP6444495B2 (ja) | 電動パワーステアリング駆動装置 | |
| KR101204624B1 (ko) | 제어 장치 일체형 전동 파워 스티어링 장치용 모터 및 전동 파워 스티어링 장치 | |
| JP4203055B2 (ja) | 電動式パワーステアリング装置 | |
| WO2012160622A1 (ja) | 電動パワーステアリング装置用モータ駆動装置 | |
| CN110892616B (zh) | 电动驱动装置及电动动力转向装置 | |
| JP2020141499A (ja) | モータ制御ユニットおよびモータ | |
| JP2020145856A (ja) | モータ制御ユニットおよびモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120828 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121003 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121106 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121127 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5147943 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |