JP4566570B2 - 光学機器 - Google Patents
光学機器 Download PDFInfo
- Publication number
- JP4566570B2 JP4566570B2 JP2004024924A JP2004024924A JP4566570B2 JP 4566570 B2 JP4566570 B2 JP 4566570B2 JP 2004024924 A JP2004024924 A JP 2004024924A JP 2004024924 A JP2004024924 A JP 2004024924A JP 4566570 B2 JP4566570 B2 JP 4566570B2
- Authority
- JP
- Japan
- Prior art keywords
- region
- signal
- lock
- lock member
- lens
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images
















Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0007—Movement of one or more optical elements for control of motion blur
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0053—Driving means for the movement of one or more optical element
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T70/00—Locks
- Y10T70/70—Operating mechanism
- Y10T70/7051—Using a powered device [e.g., motor]
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Adjustment Of Camera Lenses (AREA)
- Control Of Stepping Motors (AREA)
Description
れて、駆動電圧の供給が途中で絶たれたり、レンズ本体に衝撃等が加わった時などに、上記移動部材が、不意に所定の基準位置より移動してしまった場合は、移動部材を当接部に当接させ、所定の基準位置(初期状態)に戻すような構成になっている。
図15は、像振れ補正ユニットを搭載した、カメラシステム(レンズシステムを含む)の構成を示すブロック図である。
305は振れ補正ユニットであり、以下の6つの構成要素に大別される。第1は、振れ補正レンズとそれを保持する保持枠とから成る振れ補正光学系、第2は、振れ補正光学系を駆動するための駆動機構、第3は、移動した振れ補正光学系の位置を検出するための位置検出回路、第4は、振れ補正光学系を所定位置(光軸中心位置)にロックしたりロック解除(アンロック)したりすることのできるロック機構、第5は、ロック機構を駆動するためのロック駆動機構、第6はカメラの縦振れおよび横振れの加速度あるいは速度を検出して、振れ補正の対象となる振動状態を検出する振動検出回路である。
次に、カメラCPU201がレリーズスイッチ204のSW1信号が発生しているか否かを判別し(S5003)、発生していれば、レンズCPU301においてISスイッチ303がON(IS動作選択)になっているかを判別し(S5004)、IS動作が選択されていればステップS5005へ、選択されていなければステップS5019へ進む。
次に、カメラCPU201がレリーズスイッチ204のSW2信号が発生しているか否かを調べ(S5020)、発生していなければ再びSW1信号が発生しているか否かの判別を行い(S5022)、SW1信号も発生していなければステップS5003に戻り、SW1信号の発生待機の状態に入る。また、ステップS5020でSW2信号は発生していないがSW1信号は発生していれば、ステップS5020へ戻る。そして、このステップS5020でレリーズスイッチ204にSW2信号が発生したことを検知すると、レンズCPU301が絞りユニット307を制御し、同時にカメラCPU201が露光ユニット206を制御して、撮像素子207への露光動作を開始する(S5021)。次いで、カメラCPU201がSW1信号の状態を調べ(S5022)、SW1信号が発生していなければステップS5022からステップS5003へ戻る。
本発明の実施例におけるカメラシステムでは、電源スイッチ203がOFFされるまで上記一連の動作を繰り返し、OFFされるとカメラCPU201とレンズCPU301との通信が終了しレンズ本体300への電源供給が終了する。
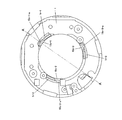
次に、本発明の振れ補正ユニットの機械的構成について説明する。
まず各部品について、概説する。図1は本発明の振れ補正ユニットの分解斜視図である。1は合成樹脂で形成されたベース部材、2は透磁率の高い鋼板で形成された第1のヨーク部材、3は永久磁石であり、矩形の4つの永久磁石3a−1、3b−1、3a−2、3b−2で構成されている。
次に各部品の詳細と各部品の相互関係について説明する。
まず、ベース部材1に第1のヨーク部材2が取り付けられる。その際、ベース部材1に設けられた突出軸部1a−1〜1a−4に、第1のヨーク部材2に設けられた穴部2a−1〜2a−4をそれぞれ係合させる。また、ベース部材1に設けられた当接面部1b−1、1b−2に第1のヨーク部材2の端面を当接させ、締結部材17a、17bを第1のヨーク部材2の溝部2b−1、2b−2に挿通させて、ベース部材1の穴部1b−1−a、1b−2−aに係合させ、ベース部材1に第1のヨーク部材を固定する。
次に、レンズ保持枠5に設けられた係合柱部5i、5jの係合穴部5i−1、5j−1(図3参照)に、ガイド部材4の第2のガイド部4bが係合する。
次に、レンズ保持枠5の穴部5g−1〜5g−3には、支持軸21a〜21cが圧入等により取り付けられる。その際、支持軸21a〜21cを、ベース部材1の突出片部1h−1〜1h−3に設けられた長穴部1h−1−a〜1h−3−aに係合させているので、ベース部材1に対する、レンズ保持枠5の光軸方向の移動が制限される。
次に、電気回路基板9には、受光素子16a、16bが実装されており、前述の発光素子15a、15bからの光線を受光できる位置に配置されている。電気回路基板9は、絶縁板8を挟んでベース部材に締結される。その際、締結部材20a、20bは、電気回路基板9の穴部9a−1、9a−2、8a−1、8a−2、7b−1、7b−2に挿通し、ベース部材1の穴部1i−1−a、1i−1−bに係合するため、ベース部材1に対して、電気回路基板9と絶縁板8と第2のヨーク部材7が位置決めされる。
次に、本発明の振れ補正ユニットの動作を説明する。
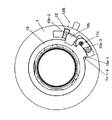
レンズCPUのロック解除指令により、ロックリング10が、イニシャル動作にて設定した基準位置から、アンロック側へ駆動される。そして、フォトインタラプタ12の出力信号が、HからLになったのを検出後、さらにアンロック側に数パルス(所定時間)駆動して駆動を停止して、ロック解除動作を終了し、振れ補正動作に移行する。その後、レンズCPUのロック駆動指令があった場合は、ロックリング10が、ロック側へ駆動される。
次に、アンロック側への駆動中に、再度焦点検出および合焦動作もしくは絞り動作の割込みがあるかどうかについて監視し、割込みがあった場合はステップS7002へ移行し、割込みがなかった場合は、フォトインタラプタ12の出力信号がHからLになったのを検出(S7008)後、さらにアンロック側に数パルス(所定時間)駆動して駆動を停止(S7009)してアンロック動作を終了し、ステップS5007に移行する。ここで、アンロック側に数パルス(所定時間)駆動する理由は、前述のロックリング10の基準位置を設定する際の考慮と同じで、アンロック領域の停止位置でのフォトインタラプタ12の出力信号を安定させるために行う処理である。
一方、『Hを通過したL』(2))もしくは『H』(3))の場合はロック領域でないと判定されるため、ロック側へ駆動される(S7012)。
そして、フォトインタラプタ12の出力信号がHからLになったのを検出(S7013)後、さらにロック側に数パルス(所定時間)駆動して駆動を停止(S7014)してロック動作を終了し、ステップS5014に移行する。
2:第1のヨーク部材
3:永久磁石
4:ガイド部材
5:レンズ保持枠
6:コイル
7:第2のヨーク部材
10:ロックリング
11:モータ
12:フォトインタラプタ
15:発光素子
16:受光素子
200:カメラ本体
300:レンズ本体
Claims (2)
- 撮影光学系の光軸と直交する方向に移動して像振れを補正するためのレンズを保持するレンズ保持部材と、前記レンズ保持部材のロック及びロック解除を行うためのロック部材であって、前記レンズ保持部材を第1の位置にロックする第1の領域と、前記レンズ保持部材のロックを解除する第2の領域と、前記第1の領域および前記第2の領域の間の移行領域である第3の領域とで移動可能であるロック部材と、前記ロック部材を駆動するアクチュエータと、前記レンズ保持部材が前記第1の位置に存在するか否かに応じた位置信号を出力する第1の検出手段と、前記ロック部材が前記第1の領域および前記第2の領域のいずれかに位置する状態で第1の信号を出力し、前記ロック部材が前記第3の領域に位置する状態で前記第1の信号とは異なる第2の信号を出力する第2の検出手段と、前記アクチュエータを制御する制御手段と、を有する光学機器であって、
前記ロック部材が前記第1の領域に位置すると判別したときは、前記アクチュエータを、前記ロック部材が前記第3の領域に移動する方向に、前記第1の信号が前記第2の信号に切り換わり、かつ前記切り換わり時点からの駆動量が第1の駆動量に達するまで駆動し、その後、前記ロック部材が前記第1の領域に移動する方向に、前記第2の信号が前記第1の信号に切り換わり、かつ前記切り換わり時点から前記第1の領域内の初期化位置に達するまで駆動し、
前記ロック部材が前記第2の領域又は前記第3の領域に位置すると判別したときは、前記アクチュエータを前記ロック部材が前記第1の領域に移動する方向に前記第2の信号が前記第1の信号に切り換わり、かつ前記切り換わり時点から前記第1の領域内の初期化位置に達するまで駆動することを特徴とする光学機器。 - 前記ロック部材が前記第1の領域に位置すると判別したときは、前記アクチュエータを、前記ロック部材が前記第3の領域に移動する方向に、前記第1の信号が前記第2の信号に切り換わり、かつ前記切り換わり時点からの駆動量が第1の駆動量に達するまで駆動し、その後、前記ロック部材が前記第1の領域に移動する方向に、前記第2の信号が前記第1の信号に切り換わり、かつ前記切り換わり時点からの駆動量が初期化位置までの駆動量に相当する第2の駆動量に達するまで駆動し、
前記ロック部材が前記第2の領域又は前記第3の領域に位置すると判別したときは、前記アクチュエータを前記ロック部材が前記第1の領域に移動する方向に前記第2の信号が前記第1の信号に切り換わり、かつ前記切り換わり時点からの駆動量が前記第2の駆動量に達するまで駆動する請求項1に記載の光学機器。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004024924A JP4566570B2 (ja) | 2004-01-30 | 2004-01-30 | 光学機器 |
| US11/032,647 US7149419B2 (en) | 2004-01-30 | 2005-01-10 | Position control device, image blur correction device, and optical apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004024924A JP4566570B2 (ja) | 2004-01-30 | 2004-01-30 | 光学機器 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010074765A Division JP4981945B2 (ja) | 2010-03-29 | 2010-03-29 | 光学機器 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005215564A JP2005215564A (ja) | 2005-08-11 |
| JP2005215564A5 JP2005215564A5 (ja) | 2007-03-15 |
| JP4566570B2 true JP4566570B2 (ja) | 2010-10-20 |
Family
ID=34805781
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004024924A Expired - Fee Related JP4566570B2 (ja) | 2004-01-30 | 2004-01-30 | 光学機器 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7149419B2 (ja) |
| JP (1) | JP4566570B2 (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2869158A1 (fr) * | 2004-04-20 | 2005-10-21 | St Microelectronics Sa | Boitier semi-conducteur optique a moyen compressible de reglage |
| US7992579B2 (en) * | 2006-12-29 | 2011-08-09 | Goody Products Inc. | Hair clip with latch mechanism |
| JP5258309B2 (ja) * | 2008-01-18 | 2013-08-07 | キヤノン株式会社 | 光学防振装置及び光学機器 |
| JP5419360B2 (ja) * | 2008-01-28 | 2014-02-19 | キヤノン株式会社 | 光学機器 |
| JP5448629B2 (ja) * | 2009-08-06 | 2014-03-19 | キヤノン株式会社 | 光学ユニットおよび光学機器 |
| JP5441666B2 (ja) * | 2009-12-21 | 2014-03-12 | キヤノン株式会社 | 光学機器 |
| KR101777350B1 (ko) * | 2011-03-14 | 2017-09-12 | 삼성전자주식회사 | 광학 요소의 위치 조정 방법 및 위치 조정 장치 |
| JP2013109040A (ja) * | 2011-11-17 | 2013-06-06 | Nikon Corp | ブレ補正ユニット、レンズ鏡筒及び光学機器 |
| US8682753B2 (en) | 2012-03-24 | 2014-03-25 | Murali S. Kulathungam | System and method to consolidate and update a user's financial account information |
| US9567773B2 (en) | 2014-02-25 | 2017-02-14 | Schlage Lock Company Llc | Electronic lock with selectable power off function |
| KR102255295B1 (ko) | 2014-07-24 | 2021-05-25 | 삼성전자주식회사 | 카메라 모듈 |
| JP6492454B2 (ja) * | 2014-08-18 | 2019-04-03 | リコーイメージング株式会社 | 像振れ補正装置および光学機器 |
| US9848108B2 (en) * | 2014-08-18 | 2017-12-19 | Ricoh Imaging Company, Ltd. | Image shake correction device and optical apparatus |
| JP7071092B2 (ja) * | 2017-11-07 | 2022-05-18 | キヤノン株式会社 | 駆動装置、光学装置および撮像装置 |
| JP7236847B2 (ja) * | 2018-11-21 | 2023-03-10 | オリンパス株式会社 | 内視鏡システム |
| JP7202468B2 (ja) * | 2018-12-26 | 2023-01-11 | 華為技術有限公司 | レンズ交換装置及び携帯端末 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01105229A (ja) * | 1987-07-30 | 1989-04-21 | Mita Ind Co Ltd | 画像形成装置におけるレンズ制御方法 |
| JPH0743591A (ja) * | 1993-07-28 | 1995-02-14 | Canon Inc | 光学機器 |
| JPH08110553A (ja) * | 1994-10-07 | 1996-04-30 | Canon Inc | カメラ |
| JPH10254018A (ja) * | 1997-03-12 | 1998-09-25 | Canon Inc | 振れ補正装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3044106B2 (ja) * | 1991-10-09 | 2000-05-22 | キヤノン株式会社 | 像ぶれ防止機能付カメラ |
| US5656899A (en) * | 1994-07-18 | 1997-08-12 | Mitsui Mining & Smelting Co., Ltd. | Control apparatus for door lock device |
| JP3530643B2 (ja) * | 1995-07-31 | 2004-05-24 | キヤノン株式会社 | レンズ鏡筒及びそれを用いた光学機器 |
| JPH10142647A (ja) | 1996-11-07 | 1998-05-29 | Canon Inc | 像ぶれ防止装置 |
| JPH10293335A (ja) | 1997-04-17 | 1998-11-04 | Canon Inc | 位置制御装置及び補正光学装置 |
| US5974269A (en) | 1996-11-07 | 1999-10-26 | Canon Kabushiki Kaisha | Image blur preventing apparatus |
| JPH10293334A (ja) | 1997-04-17 | 1998-11-04 | Canon Inc | 位置制御装置及び補正光学装置 |
| JP2002318402A (ja) * | 2001-04-20 | 2002-10-31 | Fuji Photo Optical Co Ltd | カメラ用防振レンズのロック装置、防振アダプタ及びレンズ装置 |
-
2004
- 2004-01-30 JP JP2004024924A patent/JP4566570B2/ja not_active Expired - Fee Related
-
2005
- 2005-01-10 US US11/032,647 patent/US7149419B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01105229A (ja) * | 1987-07-30 | 1989-04-21 | Mita Ind Co Ltd | 画像形成装置におけるレンズ制御方法 |
| JPH0743591A (ja) * | 1993-07-28 | 1995-02-14 | Canon Inc | 光学機器 |
| JPH08110553A (ja) * | 1994-10-07 | 1996-04-30 | Canon Inc | カメラ |
| JPH10254018A (ja) * | 1997-03-12 | 1998-09-25 | Canon Inc | 振れ補正装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050169618A1 (en) | 2005-08-04 |
| US7149419B2 (en) | 2006-12-12 |
| JP2005215564A (ja) | 2005-08-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4566570B2 (ja) | 光学機器 | |
| JP3233493B2 (ja) | 振れ補正装置 | |
| JP3253168B2 (ja) | レンズ鏡筒 | |
| EP3561589B1 (en) | Image stabilization apparatus, lens apparatus, and camera system | |
| US7991276B2 (en) | Optical image stabilizer and optical apparatus | |
| JP5794661B2 (ja) | 光学機器 | |
| US6738198B2 (en) | Optical-element holding mechanism, image-shake correcting device and optical apparatus | |
| JP3618798B2 (ja) | 像振れ補正装置 | |
| US5969886A (en) | Lens barrel and optical apparatus having the same | |
| JP4981945B2 (ja) | 光学機器 | |
| US7758261B2 (en) | Light amount adjustment apparatus and image pickup apparatus | |
| JP4416530B2 (ja) | 振れ補正装置及び光学機器 | |
| JP4416525B2 (ja) | 振れ補正装置及び光学機器 | |
| JP5714451B2 (ja) | 光学的像振れ補正装置及び撮像装置 | |
| JPH10186431A (ja) | ブレ補正装置 | |
| JPH10221726A (ja) | ブレ補正装置 | |
| JP2897022B2 (ja) | カメラの誤動作検出装置 | |
| JPH0743591A (ja) | 光学機器 | |
| JPH10228044A (ja) | ブレ補正装置と切替装置 | |
| JP3150224B2 (ja) | 振れ補正装置 | |
| JP7490441B2 (ja) | 光学機器 | |
| JP2014089264A (ja) | 光学防振装置および光学機器 | |
| KR101402207B1 (ko) | 렌즈 이동 장치 및 이를 구비한 촬상 장치 | |
| JPH11174512A (ja) | 像振れ補正装置、像振れ補正機能付きレンズ装置、及び、像振れ補正機能付きカメラ | |
| JP2011164238A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070126 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070126 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20081023 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20081201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100202 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100329 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100518 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100614 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100803 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100804 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130813 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |