JP4442568B2 - 内燃機関の失火判定装置および失火判定方法 - Google Patents
内燃機関の失火判定装置および失火判定方法 Download PDFInfo
- Publication number
- JP4442568B2 JP4442568B2 JP2006019177A JP2006019177A JP4442568B2 JP 4442568 B2 JP4442568 B2 JP 4442568B2 JP 2006019177 A JP2006019177 A JP 2006019177A JP 2006019177 A JP2006019177 A JP 2006019177A JP 4442568 B2 JP4442568 B2 JP 4442568B2
- Authority
- JP
- Japan
- Prior art keywords
- misfire
- pattern
- rotation angle
- internal combustion
- combustion engine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M15/00—Testing of engines
- G01M15/04—Testing internal-combustion engines
- G01M15/042—Testing internal-combustion engines by monitoring a single specific parameter not covered by groups G01M15/06 - G01M15/12
- G01M15/046—Testing internal-combustion engines by monitoring a single specific parameter not covered by groups G01M15/06 - G01M15/12 by monitoring revolutions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D45/00—Electrical control not provided for in groups F02D41/00 - F02D43/00
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D35/00—Controlling engines, dependent on conditions exterior or interior to engines, not otherwise provided for
- F02D35/02—Controlling engines, dependent on conditions exterior or interior to engines, not otherwise provided for on interior conditions
- F02D35/027—Controlling engines, dependent on conditions exterior or interior to engines, not otherwise provided for on interior conditions using knock sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/009—Electrical control of supply of combustible mixture or its constituents using means for generating position or synchronisation signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/0097—Electrical control of supply of combustible mixture or its constituents using means for generating speed signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D43/00—Conjoint electrical control of two or more functions, e.g. ignition, fuel-air mixture, recirculation, supercharging or exhaust-gas treatment
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M15/00—Testing of engines
- G01M15/04—Testing internal-combustion engines
- G01M15/11—Testing internal-combustion engines by detecting misfire
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/02—Input parameters for engine control the parameters being related to the engine
- F02D2200/10—Parameters related to the engine output, e.g. engine torque or engine speed
- F02D2200/1015—Engines misfires
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/021—Introducing corrections for particular conditions exterior to the engine
- F02D41/0235—Introducing corrections for particular conditions exterior to the engine in relation with the state of the exhaust gas treating apparatus
- F02D41/024—Introducing corrections for particular conditions exterior to the engine in relation with the state of the exhaust gas treating apparatus to increase temperature of the exhaust gas treating apparatus
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1497—With detection of the mechanical response of the engine
- F02D41/1498—With detection of the mechanical response of the engine measuring engine roughness
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
排気系に排気を浄化する浄化装置が取り付けられた複数気筒の内燃機関を備えるハイブリッドシステムにおける該内燃機関の失火を判定する内燃機関の失火判定装置であって、
前記内燃機関の出力軸の回転位置を検出する回転位置検出手段と、
前記検出された回転位置に基づいて前記内燃機関の出力軸の所定の単位回転角毎の回転に要する時間である単位回転角所要時間を演算する単位回転角所要時間演算手段と、
前記内燃機関に対して前記浄化装置の暖機を促進するための暖機促進制御が行なわれているときには前記演算された単位回転角所要時間を用いて複数の失火パターンを少なくとも二つのグループに区分けして該複数の失火パターンを判定し、前記暖機促進制御が行なわれていないときには前記演算された単位回転角所要時間を用いて前記複数の失火パターンを前記グループとは異なるグループに区分けして該複数の失火パターンを判定する失火判定手段と、
を備えることを要旨とする。
排気系に排気を浄化する浄化装置が取り付けられた複数気筒の内燃機関を備えるハイブリッドシステムにおける該内燃機関の失火を判定する内燃機関の失火判定方法であって、
前記内燃機関に対して前記浄化装置の暖機を促進するための暖機促進制御が行なわれているときには、前記内燃機関の出力軸の回転位置に基づいて前記内燃機関の出力軸の所定の単位回転角毎の回転に要する時間である単位回転角所要時間を演算すると共に該演算した単位回転角所要時間を用いて複数の失火パターンを少なくとも二つのグループに区分けして該複数の失火パターンを判定し、
前記暖機促進制御が行なわれていないときには、前記単位回転角所要時間を演算すると共に前記演算した単位回転角所要時間を用いて前記複数の失火パターンを前記グループとは異なるグループに区分けして該複数の失火パターンを判定する、
ことを特徴とする。
Claims (10)
- 排気系に排気を浄化する浄化装置が取り付けられた複数気筒の内燃機関を備えるハイブリッドシステムにおける該内燃機関の失火を判定する内燃機関の失火判定装置であって、
前記内燃機関の出力軸の回転位置を検出する回転位置検出手段と、
前記検出された回転位置に基づいて前記内燃機関の出力軸の所定の単位回転角毎の回転に要する時間である単位回転角所要時間を演算する単位回転角所要時間演算手段と、
前記複数気筒のうちの1気筒だけが失火している単失火パターンと前記複数気筒のうち連続する2気筒が失火している連続失火パターンと前記複数気筒のうち一つの燃焼気筒を挟む2気筒が失火している間欠失火パターンとからなる複数の失火パターンを判定する際に、前記内燃機関に対して前記浄化装置の暖機を促進するための暖機促進制御が行なわれているときには前記演算された単位回転角所要時間を用いて前記単失火パターンと前記間欠失火パターンとのグループと前記連続失火パターンのグループとに区分けして該複数の失火パターンを判定し、前記暖機促進制御が行なわれていないときには前記演算された単位回転角所要時間を用いて前記単失火パターンと前記連続失火パターンとのグループと前記間欠失火パターンのグループとに区分けして該複数の失火パターンを判定する失火判定手段と、
を備え、
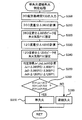
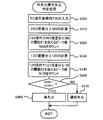
前記失火判定手段は、前記暖機促進制御が行なわれているときには、前記演算された単位回転角所要時間が第1の時間を超えるときに前記連続失火パターンのグループと判定し、前記演算された単位回転角所要時間が前記第1の時間は超えないが該第1の時間より短い第2の時間を超えるときに前記単失火パターンと前記間欠失火パターンとのグループと判定し、前記暖機促進制御が行なわれていないときには、前記演算された単位回転角所要時間が第3の時間を超えるときに前記間欠失火パターンのグループと判定し、前記演算された単位回転角所要時間が前記第3の時間は超えないが該第3の時間より短い第4の時間を超えるときに前記単失火パターンと前記連続失火パターンとのグループと判定する手段である、
内燃機関の失火判定装置。 - 前記失火判定手段は、前記暖機促進制御が行なわれているときには、前記単失火パターンと前記間欠失火パターンとのグループを区分けした後に前記演算された単位回転角所要時間の所定角度差に基づいて前記単失火パターンと前記間欠失火パターンとを分別して判定する手段である請求項1記載の内燃機関の失火判定装置。
- 前記失火判定手段は、前記暖機促進制御が行なわれているときに前記単失火パターンと前記間欠失火パターンとのグループを区分けした後は、前記演算された単位回転角所要時間の360度差および/または120度差とに基づいて単失火パターンと間欠失火パターンとを判定する手段である請求項2記載の失火判定装置。
- 前記失火判定手段は、前記暖機促進制御が行なわれているときに前記単失火パターンと
前記間欠失火パターンとのグループを区分けした後は、前記360度差が720度内で第1の判定値を1回のみ超えると共に前記120度差が720度内で第2の判定値を1回のみ超えるときに単失火パターンを判定し、前記360度差が720度内で前記第1の判定値を2回超えると共に前記120度差が720度内で前記第2の判定値を2回超えるときに間欠失火パターンを判定する手段である請求項3記載の失火判定装置。 - 前記失火判定手段は、前記暖機促進制御が行なわれていないときには、前記単失火パターンと前記連続失火パターンとのグループを区分けした後に前記演算された単位回転角所要時間の所定角度差に基づいて前記単失火パターンと前記連続失火パターンとを分別して判定する手段である請求項2ないし4いずれか記載の内燃機関の失火判定装置。
- 前記失火判定手段は、前記暖機促進制御が行なわれていないときに前記単失火パターンと前記連続失火パターンとのグループを区分けした後は、前記演算された単位回転角所要時間の360度差および/または120度差とに基づいて前記単失火パターンと前記連続失火パターンとを判定する手段である請求項5記載の内燃機関の失火判定装置。
- 前記失火判定手段は、前記暖機促進制御が行なわれていないときに前記単失火パターンと前記連続失火パターンとのグループを区分けした後は、前記演算された単位回転角所要時間の360度差におけるパターンと120度差におけるパターンとに基づいて前記単失火パターンを判定し、前記演算された単位回転角所要時間の360度差におけるパターンと120度差におけるパターンとによっては前記単失火パターンが判定されないときに前記連続失火パターンと判定する手段である請求項6記載の内燃機関の失火判定装置。
- 前記失火判定手段は、前記演算された単位回転角所要時間を用いて複数の失火パターンを二つのグループに区分けした後に、前記演算された単位回転角所要時間の所定角度差に基づいて区分けしたグループ内の失火を判定する手段である請求項1記載の内燃機関の失火判定装置。
- 前記所定角度差は、360度差および/または120度差である請求項8記載の内燃機関の失火判定装置。
- 排気系に排気を浄化する浄化装置が取り付けられた複数気筒の内燃機関を備えるハイブリッドシステムにおける該内燃機関の失火を前記複数気筒のうちの1気筒だけが失火している単失火パターンと前記複数気筒のうち連続する2気筒が失火している連続失火パターンと前記複数気筒のうち一つの燃焼気筒を挟む2気筒が失火している間欠失火パターンとからなる複数の失火パターンとして判定する内燃機関の失火判定方法であって、
前記内燃機関に対して前記浄化装置の暖機を促進するための暖機促進制御が行なわれているときには、前記内燃機関の出力軸の回転位置に基づいて前記内燃機関の出力軸の所定の単位回転角毎の回転に要する時間である単位回転角所要時間を演算すると共に該演算した単位回転角所要時間を用いて前記単失火パターンと前記間欠失火パターンとのグループと前記連続失火パターンのグループとに区分けして該複数の失火パターンを判定し、
前記暖機促進制御が行なわれていないときには、前記単位回転角所要時間を演算すると共に前記演算した単位回転角所要時間を用いて前記単失火パターンと前記連続失火パターンとのグループと前記間欠失火パターンのグループとに区分けして該複数の失火パターンを判定する、
ことを特徴とし、
前記グループの区分けは、前記暖機促進制御が行なわれているときには、前記演算された単位回転角所要時間が第1の時間を超えるときに前記連続失火パターンのグループと判定し、前記演算された単位回転角所要時間が前記第1の時間は超えないが該第1の時間より短い第2の時間を超えるときに前記単失火パターンと前記間欠失火パターンとのグループと判定することにより行ない、前記暖機促進制御が行なわれていないときには、前記演算された単位回転角所要時間が第3の時間を超えるときに前記間欠失火パターンのグループと判定し、前記演算された単位回転角所要時間が前記第3の時間は超えないが該第3の時間より短い第4の時間を超えるときに前記単失火パターンと前記連続失火パターンとのグループと判定することにより行なう、
内燃機関の失火判定方法。
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006019177A JP4442568B2 (ja) | 2006-01-27 | 2006-01-27 | 内燃機関の失火判定装置および失火判定方法 |
| KR1020077029498A KR100942280B1 (ko) | 2006-01-27 | 2006-11-29 | 내연기관의 실화 판정장치 및 실화 판정방법 |
| AU2006336750A AU2006336750B2 (en) | 2006-01-27 | 2006-11-29 | Misfire judging apparatus, and method of misfire judgment, for internal combustion engine |
| CN2006800234154A CN101213359B (zh) | 2006-01-27 | 2006-11-29 | 内燃机的失火判定装置以及失火判定方法 |
| IN8766DEN2007 IN266765B (ja) | 2006-01-27 | 2006-11-29 | |
| US11/919,214 US7543483B2 (en) | 2006-01-27 | 2006-11-29 | Engine misfire detection apparatus for internal combustion engine and engine misfire detection method |
| EP06833568.6A EP1978228A4 (en) | 2006-01-27 | 2006-11-29 | Misfire judging apparatus, and method of misfire judgment, for internal combustion engine |
| PCT/JP2006/323764 WO2007086192A1 (ja) | 2006-01-27 | 2006-11-29 | 内燃機関の失火判定装置および失火判定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006019177A JP4442568B2 (ja) | 2006-01-27 | 2006-01-27 | 内燃機関の失火判定装置および失火判定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007198304A JP2007198304A (ja) | 2007-08-09 |
| JP4442568B2 true JP4442568B2 (ja) | 2010-03-31 |
Family
ID=38308999
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006019177A Expired - Fee Related JP4442568B2 (ja) | 2006-01-27 | 2006-01-27 | 内燃機関の失火判定装置および失火判定方法 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7543483B2 (ja) |
| EP (1) | EP1978228A4 (ja) |
| JP (1) | JP4442568B2 (ja) |
| KR (1) | KR100942280B1 (ja) |
| CN (1) | CN101213359B (ja) |
| AU (1) | AU2006336750B2 (ja) |
| IN (1) | IN266765B (ja) |
| WO (1) | WO2007086192A1 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4552687B2 (ja) * | 2005-01-11 | 2010-09-29 | トヨタ自動車株式会社 | 内燃機関の失火判定装置および失火判定方法 |
| JP4492549B2 (ja) * | 2006-01-27 | 2010-06-30 | トヨタ自動車株式会社 | 失火判定装置、ハイブリッド自動車及び失火判定方法 |
| JP4702169B2 (ja) * | 2006-05-09 | 2011-06-15 | トヨタ自動車株式会社 | 内燃機関装置およびこれを搭載する車両並びに内燃機関の失火判定方法 |
| JP4702180B2 (ja) * | 2006-05-23 | 2011-06-15 | トヨタ自動車株式会社 | 内燃機関装置および内燃機関の失火判定方法 |
| JP4458105B2 (ja) * | 2007-03-07 | 2010-04-28 | トヨタ自動車株式会社 | 内燃機関装置およびこれを搭載する車両並びに内燃機関の失火判定方法 |
| JP4276685B2 (ja) * | 2007-07-25 | 2009-06-10 | 株式会社日本自動車部品総合研究所 | 内燃機関の異常検出装置および異常検出方法 |
| JP4483927B2 (ja) | 2007-10-26 | 2010-06-16 | トヨタ自動車株式会社 | 多気筒内燃機関の失火気筒特定装置 |
| US7707874B2 (en) * | 2007-12-11 | 2010-05-04 | Toyota Jidosha Kabushiki Kaisha | Misfire determination device and method for internal combustion engine, and vehicle including misfire determination device |
| JP4438858B2 (ja) * | 2007-12-12 | 2010-03-24 | トヨタ自動車株式会社 | 内燃機関の失火判定装置および車両並びにねじれ要素の剛性推定装置,内燃機関の失火判定方法,ねじれ要素の剛性推定方法 |
| JP4691142B2 (ja) * | 2008-07-17 | 2011-06-01 | 本田技研工業株式会社 | 内燃機関の失火検出装置 |
| CN101839807B (zh) * | 2010-05-07 | 2012-08-08 | 北汽福田汽车股份有限公司 | 一种多缸发动机的失火检测装置与方法 |
| CN102374094B (zh) * | 2010-08-20 | 2013-09-11 | 长春易控汽车电子有限公司 | 发动机失火故障诊断方法 |
| JP5402982B2 (ja) * | 2011-05-12 | 2014-01-29 | トヨタ自動車株式会社 | 内燃機関の異常判定装置 |
| US8601862B1 (en) * | 2012-05-22 | 2013-12-10 | GM Global Technology Operations LLC | System and method for detecting misfire based on a firing pattern of an engine and engine torque |
| JP2015190330A (ja) * | 2014-03-27 | 2015-11-02 | マツダ株式会社 | エンジンの失火検出装置 |
| JP6269572B2 (ja) * | 2015-05-15 | 2018-01-31 | トヨタ自動車株式会社 | エンジン装置 |
| US10005469B2 (en) | 2016-06-08 | 2018-06-26 | Fca Us Llc | Response amplitude modification for hybrid electric vehicle misfire detections |
| JP6665774B2 (ja) * | 2016-12-26 | 2020-03-13 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
| EP3555441A4 (en) | 2017-03-08 | 2020-08-12 | Kerdea Technologies, Inc. | DETECTION OF FAILED COMBUSTION IGNITION EVENTS IN ENGINES BY COMPARING SIGNALS DERIVED FROM TWO DIFFERENT TYPES OF OXYGEN SENSORS |
| FR3072125A1 (fr) * | 2017-10-09 | 2019-04-12 | Continental Automotive France | Procede et systeme de validation de la phase d'un moteur de vehicule |
| US10899355B2 (en) | 2018-09-26 | 2021-01-26 | Fca Us Llc | Crank velocity driveline filtering for consecutive misfire detection |
| EP3929424B1 (en) | 2019-03-13 | 2023-07-26 | Yamaha Hatsudoki Kabushiki Kaisha | Straddled vehicle engine unit and straddled vehicle |
| JP6624324B1 (ja) | 2019-03-29 | 2019-12-25 | トヨタ自動車株式会社 | 内燃機関の失火検出装置、内燃機関の失火検出システム、データ解析装置、内燃機関の制御装置、内燃機関の失火検出方法、および受信実行装置 |
| JP6624325B1 (ja) * | 2019-03-29 | 2019-12-25 | トヨタ自動車株式会社 | 内燃機関の失火検出装置、内燃機関の失火検出システム、データ解析装置、内燃機関の制御装置、内燃機関の失火検出方法、および受信実行装置 |
| GB2597964B (en) * | 2020-08-12 | 2022-11-30 | Caterpillar Energy Solutions Gmbh | Misfire detection method and control unit of an internal combustion engine |
| JP7322852B2 (ja) * | 2020-10-09 | 2023-08-08 | トヨタ自動車株式会社 | 内燃機関の失火検出装置 |
| CN112523885B (zh) * | 2020-11-27 | 2023-04-14 | 江门市大长江集团有限公司 | 一种发动机内失火的控制方法及装置 |
| JP7392672B2 (ja) * | 2021-01-29 | 2023-12-06 | トヨタ自動車株式会社 | 内燃機関の失火検出装置 |
| CN115217625B (zh) * | 2021-06-17 | 2023-09-01 | 广州汽车集团股份有限公司 | 发动机失火诊断标定方法、装置、存储介质、设备及系统 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2636565B2 (ja) | 1991-07-12 | 1997-07-30 | トヨタ自動車株式会社 | 異常検出装置 |
| US5309756A (en) * | 1991-07-04 | 1994-05-10 | Toyota Jidosha Kabushiki Kaisha | Device for determining malfunction of an engine cylinder |
| US5544058A (en) * | 1992-10-20 | 1996-08-06 | Mitsubishi Denki Kabushiki Kaisha | Misfire detecting apparatus for a multi-cylinder internal combustion engine |
| JP3675049B2 (ja) | 1996-08-09 | 2005-07-27 | 株式会社デンソー | 内燃機関の失火検出装置 |
| JP2937107B2 (ja) | 1996-02-19 | 1999-08-23 | 三菱自動車工業株式会社 | 燃焼悪化検出装置 |
| JP3360566B2 (ja) | 1997-05-23 | 2002-12-24 | トヨタ自動車株式会社 | 多気筒内燃機関の失火検出装置 |
| JP2000240501A (ja) * | 1999-02-23 | 2000-09-05 | Denso Corp | ハイブリッド型車両の多気筒内燃機関失火検出装置 |
| JP3961745B2 (ja) | 2000-06-22 | 2007-08-22 | 株式会社デンソー | 内燃機関の失火検出装置 |
| JP4120276B2 (ja) | 2002-05-31 | 2008-07-16 | トヨタ自動車株式会社 | 内燃機関の失火検出装置 |
| JP4552687B2 (ja) * | 2005-01-11 | 2010-09-29 | トヨタ自動車株式会社 | 内燃機関の失火判定装置および失火判定方法 |
| JP4525538B2 (ja) * | 2005-02-24 | 2010-08-18 | トヨタ自動車株式会社 | 内燃機関の失火判定装置および失火判定方法 |
-
2006
- 2006-01-27 JP JP2006019177A patent/JP4442568B2/ja not_active Expired - Fee Related
- 2006-11-29 IN IN8766DEN2007 patent/IN266765B/en unknown
- 2006-11-29 WO PCT/JP2006/323764 patent/WO2007086192A1/ja active Application Filing
- 2006-11-29 AU AU2006336750A patent/AU2006336750B2/en not_active Ceased
- 2006-11-29 CN CN2006800234154A patent/CN101213359B/zh not_active Expired - Fee Related
- 2006-11-29 KR KR1020077029498A patent/KR100942280B1/ko not_active IP Right Cessation
- 2006-11-29 EP EP06833568.6A patent/EP1978228A4/en not_active Withdrawn
- 2006-11-29 US US11/919,214 patent/US7543483B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| KR100942280B1 (ko) | 2010-02-16 |
| JP2007198304A (ja) | 2007-08-09 |
| AU2006336750B2 (en) | 2009-09-10 |
| CN101213359A (zh) | 2008-07-02 |
| AU2006336750A1 (en) | 2007-08-02 |
| EP1978228A4 (en) | 2017-03-29 |
| CN101213359B (zh) | 2010-05-19 |
| US20080196485A1 (en) | 2008-08-21 |
| US7543483B2 (en) | 2009-06-09 |
| KR20080012365A (ko) | 2008-02-11 |
| IN266765B (ja) | 2015-05-29 |
| EP1978228A1 (en) | 2008-10-08 |
| WO2007086192A1 (ja) | 2007-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4442568B2 (ja) | 内燃機関の失火判定装置および失火判定方法 | |
| JP4007401B1 (ja) | 内燃機関の失火判定装置および失火判定方法 | |
| JP4525538B2 (ja) | 内燃機関の失火判定装置および失火判定方法 | |
| JP4458105B2 (ja) | 内燃機関装置およびこれを搭載する車両並びに内燃機関の失火判定方法 | |
| JP4702180B2 (ja) | 内燃機関装置および内燃機関の失火判定方法 | |
| JP4453654B2 (ja) | 内燃機関の失火判定装置およびこれを搭載する車両並びに失火判定方法 | |
| US9545920B2 (en) | Misfire determination device for internal combustion engine | |
| JP2008057492A (ja) | 内燃機関の失火判定装置および失火判定方法並びに車両 | |
| US9951710B2 (en) | Vehicle and control method for vehicle | |
| CN106150731B (zh) | 发动机装置 | |
| JP2007303310A (ja) | 内燃機関装置および内燃機関の失火判定方法 | |
| JP2009292362A (ja) | 内燃機関の失火判定装置およびハイブリッド車並びに内燃機関の失火判定方法 | |
| CN102477916A (zh) | 车辆、用于内燃机的异常判定方法和用于内燃机的异常判定装置 | |
| JP4816574B2 (ja) | 内燃機関の出力状態検出装置、車両及び内燃機関の出力状態検出方法 | |
| JP2007170248A (ja) | 内燃機関装置およびこれを搭載する車両並びに内燃機関の失火判定方法 | |
| JP4650379B2 (ja) | 内燃機関の失火判定装置および失火判定方法並びに車両 | |
| JP2009298365A (ja) | 動力出力装置およびこれを搭載する車両並びに動力出力装置の制御方法 | |
| JP2008063975A (ja) | 内燃機関の失火判定装置および失火判定方法並びに車両 | |
| JP2008095617A (ja) | 内燃機関の失火判定装置および失火判定方法 | |
| JP4697046B2 (ja) | 内燃機関装置および内燃機関の失火判定方法 | |
| JP4605124B2 (ja) | 内燃機関の失火判定装置および失火判定方法並びに車両 | |
| JP4650342B2 (ja) | 内燃機関装置および内燃機関の失火判定方法 | |
| JP4952684B2 (ja) | 内燃機関の失火判定装置およびその失火判定方法 | |
| JP2009281186A (ja) | 内燃機関の失火判定装置および車両並びに内燃機関の失火判定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080311 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091110 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091202 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091222 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100104 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130122 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130122 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |