JP4105166B2 - 制御システムを備える自動車シート - Google Patents
制御システムを備える自動車シート Download PDFInfo
- Publication number
- JP4105166B2 JP4105166B2 JP2004566416A JP2004566416A JP4105166B2 JP 4105166 B2 JP4105166 B2 JP 4105166B2 JP 2004566416 A JP2004566416 A JP 2004566416A JP 2004566416 A JP2004566416 A JP 2004566416A JP 4105166 B2 JP4105166 B2 JP 4105166B2
- Authority
- JP
- Japan
- Prior art keywords
- seat
- base
- seat base
- seat back
- control circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 30
- 230000004044 response Effects 0.000 claims abstract description 14
- 230000008859 change Effects 0.000 claims abstract description 4
- 239000000758 substrate Substances 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 8
- 230000006870 function Effects 0.000 description 8
- 230000005484 gravity Effects 0.000 description 6
- 230000005355 Hall effect Effects 0.000 description 5
- 239000000872 buffer Substances 0.000 description 3
- 230000001052 transient effect Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 239000003990 capacitor Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000012935 Averaging Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 210000004705 lumbosacral region Anatomy 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/0224—Non-manual adjustments, e.g. with electrical operation
- B60N2/02246—Electric motors therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/0224—Non-manual adjustments, e.g. with electrical operation
- B60N2/0244—Non-manual adjustments, e.g. with electrical operation with logic circuits
- B60N2/0252—Non-manual adjustments, e.g. with electrical operation with logic circuits with relations between different adjustments, e.g. height of headrest following longitudinal position of seat
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/04—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable
- B60N2/06—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable slidable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/04—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable
- B60N2/06—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable slidable
- B60N2/067—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the whole seat being movable slidable by linear actuators, e.g. linear screw mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2/00—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles
- B60N2/02—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable
- B60N2/22—Seats specially adapted for vehicles; Arrangement or mounting of seats in vehicles the seat or part thereof being movable, e.g. adjustable the back-rest being adjustable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60N—SEATS SPECIALLY ADAPTED FOR VEHICLES; VEHICLE PASSENGER ACCOMMODATION NOT OTHERWISE PROVIDED FOR
- B60N2210/00—Sensor types, e.g. for passenger detection systems or for controlling seats
- B60N2210/10—Field detection presence sensors
- B60N2210/14—Inductive; Magnetic field
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Seats For Vehicles (AREA)
- Chairs For Special Purposes, Such As Reclining Chairs (AREA)
Description
Claims (17)
- 車両シート用の制御システムであって、
シート基部を前方及び後方に移動するように構成されるシート基部モータと;
シートバックの傾斜角度を調整するように構成される手動リクライナー機構と;および
前記傾斜角度の変更に応じて、前記シート基部を前方或いは後方に移動するよう構成される制御回路とを具備し、
前記制御回路は前記シート基部モータを制御し、前記シートバックの傾斜角度に比例する距離まで前記シート基部を移動する
ことを特徴とする車両シート用の制御システム。 - 前記制御回路は、前記シートバックの傾斜角度約1度に対して約1mmから約3mmの間の比率で前記シート基部を前方又は後方に移動するように構成されることを特徴とする請求項1に記載の車両シート用の制御システム。
- 前記制御回路は、前記シートバックのリクラインに応じて前記シート基部を前方に移動し、前記シートバックのインクラインに応じて前記シート基部を後方に移動するよう構成される
ことを特徴とする請求項1に記載の車両シート用の制御システム。 - 前記制御システムは、さらに、
前記シートバックの位置を測定するセンサを具備し、
前記センサにより検出された前記シートバックの位置に応じた傾斜角度に比例する距離まで前記シート基部を移動する
ことを特徴とする請求項1に記載の車両シート用の制御システム。 - 前記センサは、ポテンショメータである
ことを特徴とする請求項4に記載の車両シート用の制御システム。 - 車両シート用の制御システムであって、
シート基部を前方及び後方に移動するよう構成されるシート基部モータと;
シートバックの傾斜角度を調整するよう構成される手動リクライナー機構と;及び
前記シート基部モータを制御し、前記シートバックの傾斜角度に比例する距離まで前記シート基部を移動するよう構成される制御回路とを具備し、
前記シートバックの傾斜角度約1度に対して約1mmから約3mmの間の比率で前記シート基部を前方又は後方に移動するように構成され、前記シートバックが前方に傾斜角度約1度でインクラインされたときには前記シート基部を後方に約1mmから約3mmの間の比率で移動し、前記シートバックが後方に傾斜角度約1度でリクラインされたときには前記シート基部を前方に約1mmから約3mmの間の比率で移動する
ことを特徴とする車両シート用の制御システム。 - 前記比率は、前記シートバックの傾斜角度1度に対して、前記シート基板を前方又は後方へ約1.5mm移動することであることを特徴とする請求項6に記載の車両シート用の制御システム。
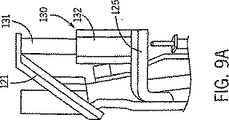
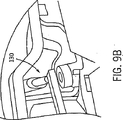
- 制御システムを有する車両シートであって、
トラックと;
前記トラックに結合されるシート基部と;
前記シート基部を前方及び後方に移動するよう構成されるシート基部モータと;
前記トラックに枢支結合されるシートバックと;
前記トラックに対して、前記シートバックを枢支回動するよう構成される手動リクライナー機構と;
前記シート基部の移動用のオペレータコマンドを受信するよう構成されるシート基部入力装置と;及び
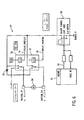
前記シート基部入力装置からの前記オペレータコマンドを受信して前記シート基部モータを制御するよう構成される制御回路とを具備し、
前記制御回路は前記シート基部モータを制御し、前記シートバックの傾斜角度に比例する距離まで前記シート基部を移動するよう構成され;及び
前記制御回路は前記シート基部入力装置からのコマンド受信に応答して、前記シート基部モータを制御し、前記シート基部のみを移動するよう構成される
ことを特徴とする車両シート。 - 前記制御回路は、前記シートバックの傾斜角約1度に対して約1mmから約3mmの間の比率で前記シート基部を前方又は後方に移動するよう構成されることを特徴とする請求項8に記載の車両シート。
- 前記車両シートは、さらに、
前記シートバックの位置を測定するセンサーを具備し、
前記制御回路は、前記センサにより検出された前記シートバックの位置に応じた傾斜角度に比例する距離まで前記シート基部を移動する
ことを特徴とする請求項8に記載の車両シート。 - 前記センサは、ポテンショメータである
ことを特徴とする請求項10に記載の車両シート。 - 前記制御回路は、前記シートバックの後方枢支回転に応じて、前記シート基部をほぼ前方に移動し、前記シートバックの前方枢支回動に応じて、前記シート基部をほぼ後方に移動する
ことを特徴とする請求項8に記載の車両シート。 - 前記手動リクライナー機構はハンドルにより駆動される
ことを特徴とする請求項8に記載の車両シート。 - 前記制御回路は、マイクロプロセッサを含む
ことを特徴とする請求項8に記載の車両シート。 - 車両シート用の制御システムであって、
シート基部を前方及び後方に移動するよう構成されるシート基部モータと;
シートバックの傾斜角度を調整するよう構成される手動リクライナー機構と;及び
前記シートバックのインクラインに応じて、前記シート基部を後方に移動するよう構成される制御回路とを具備し、
前記制御回路は前記シート基部モータを制御し、前記シートバックのインクラインの傾斜角度に比例する距離まで前記シート基部を後方に移動する
ことを特徴とする車両シート用の制御システム。 - 前記制御システムは、前記シートバックの約1度毎の傾斜に応じて、前記シート基部を後方に約1mmから約3mmの間で移動するよう構成される
ことを特徴とする請求項15に記載の車両シート用の制御システム。 - 前記制御システムは、さらに、
前記シートバックの位置を測定するセンサをさらに具備する
ことを特徴とする請求項15に記載の車両シート用の制御システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US43780403P | 2003-01-03 | 2003-01-03 | |
| PCT/US2003/019174 WO2004062961A1 (en) | 2003-01-03 | 2003-06-18 | Automotive seat with control system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006512169A JP2006512169A (ja) | 2006-04-13 |
| JP4105166B2 true JP4105166B2 (ja) | 2008-06-25 |
Family
ID=32713231
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004566416A Expired - Fee Related JP4105166B2 (ja) | 2003-01-03 | 2003-06-18 | 制御システムを備える自動車シート |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20060208549A1 (ja) |
| EP (1) | EP1587706B1 (ja) |
| JP (1) | JP4105166B2 (ja) |
| CN (1) | CN100447014C (ja) |
| AT (1) | ATE470593T1 (ja) |
| AU (1) | AU2003243625A1 (ja) |
| DE (1) | DE60332963D1 (ja) |
| WO (1) | WO2004062961A1 (ja) |
Families Citing this family (47)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7237847B2 (en) | 2002-02-12 | 2007-07-03 | Johnson Controls Technology Company | Automotive seat with active back |
| WO2003068552A1 (en) | 2002-02-12 | 2003-08-21 | Johnson Controls Technology Company | Vehicle seat having an electronic control system |
| JP4804185B2 (ja) * | 2006-03-24 | 2011-11-02 | 株式会社オーテックジャパン | 車両用シートの昇降速度可変スイッチ |
| US7823967B2 (en) * | 2007-03-26 | 2010-11-02 | Emteq, Inc. | Heater system for an aircraft seat |
| JP5418827B2 (ja) * | 2009-08-21 | 2014-02-19 | アイシン精機株式会社 | シート制御機構 |
| US8266743B2 (en) * | 2010-08-23 | 2012-09-18 | Midmark Corporation | Examination table with motion tracking |
| JP5655574B2 (ja) * | 2011-01-07 | 2015-01-21 | アイシン精機株式会社 | 車両用シートリクライニング装置 |
| DE102012007978A1 (de) * | 2012-04-20 | 2013-10-24 | GM Global Technology Operations LLC (n. d. Gesetzen des Staates Delaware) | Fahrzeugsitz für ein Kraftfahrzeug |
| US8807650B2 (en) | 2012-04-26 | 2014-08-19 | Barbara ASCHER | Infant to adult adjustable car seat |
| DE102012008822A1 (de) | 2012-05-07 | 2013-11-07 | GM Global Technology Operations LLC (n.d. Ges. d. Staates Delaware) | Verstellvorrichtung, Kraftfahrzeugsitz, Kraftfahrzeug und Verfahren hierzu |
| US9333880B2 (en) * | 2013-03-15 | 2016-05-10 | Lear Corporation | System and method for controlling vehicle seat movement |
| US20140316660A1 (en) * | 2013-04-18 | 2014-10-23 | Ford Global Technologies, Llc | Seat-integrated occupant presence detector |
| US9499072B2 (en) | 2014-02-17 | 2016-11-22 | Lear Corporation | Seat cushion length extender with sensor |
| CN106414239B (zh) * | 2014-03-31 | 2021-07-30 | Be航天公司 | 用于锁紧气弹簧的电子致动的机械电缆释放装置和方法 |
| US9610862B2 (en) * | 2014-10-14 | 2017-04-04 | Faurecia Automotive Seating, Llc | Seat position sensing and adjustment |
| CN104601059A (zh) * | 2015-01-16 | 2015-05-06 | 信阳师范学院 | 一种直流电机控制器及方法 |
| FR3064557B1 (fr) * | 2017-04-04 | 2021-01-29 | Zodiac Actuation Systems | Siege notamment pour vehicule de transport de passagers |
| US10906431B2 (en) | 2018-05-04 | 2021-02-02 | Lear Corporation | Track assembly |
| US11358497B2 (en) | 2018-05-04 | 2022-06-14 | Lear Corporation | Track system having a rolling member |
| US10562414B2 (en) | 2018-05-04 | 2020-02-18 | Lear Corporation | Track assembly |
| US11040639B2 (en) | 2018-05-04 | 2021-06-22 | Lear Corporation | Track assembly |
| US10882420B2 (en) | 2019-03-08 | 2021-01-05 | Lear Corporation | Track assembly |
| US10926667B2 (en) | 2018-05-04 | 2021-02-23 | Lear Corporation | Track assembly |
| US11040638B2 (en) | 2018-05-04 | 2021-06-22 | Lear Corporation | Track assembly |
| US10850649B2 (en) * | 2018-05-24 | 2020-12-01 | Honda Motor Co., Ltd. | Vehicle seat controller |
| US11225201B2 (en) | 2018-12-10 | 2022-01-18 | Lear Corporation | Track assembly |
| US11440482B2 (en) | 2018-12-10 | 2022-09-13 | Lear Corporation | Track assembly |
| US10855037B2 (en) | 2018-12-17 | 2020-12-01 | Lear Corporation | Support assembly with a support member and a track assembly |
| US11613220B2 (en) | 2018-12-17 | 2023-03-28 | Lear Corporation | Electrical assembly |
| US11117538B2 (en) | 2018-12-17 | 2021-09-14 | Lear Corporation | Electrical assembly |
| US10950977B2 (en) | 2018-12-18 | 2021-03-16 | Lear Corporation | Track assembly for a vehicle component |
| US11161430B2 (en) * | 2019-02-07 | 2021-11-02 | Volvo Car Corporation | Vehicle occupant posture detection |
| US11975665B2 (en) * | 2019-02-20 | 2024-05-07 | Lear Corporation | Electrical assembly |
| US11040653B2 (en) | 2019-02-25 | 2021-06-22 | Lear Corporation | Track assembly |
| US11299075B2 (en) * | 2019-03-06 | 2022-04-12 | Lear Corporation | Electrical assembly |
| US11807142B2 (en) | 2019-03-06 | 2023-11-07 | Lear Corporation | Electrical track assembly |
| US11323114B2 (en) | 2019-10-04 | 2022-05-03 | Lear Corporation | Electrical system |
| US11634101B2 (en) | 2019-10-04 | 2023-04-25 | Lear Corporation | Removable component system |
| US11463083B2 (en) | 2019-10-04 | 2022-10-04 | Lear Corporation | Electrical system |
| KR102286924B1 (ko) * | 2019-11-13 | 2021-08-06 | 현대자동차주식회사 | 시트백 자동 복원 장치 및 방법 |
| CN113043920B (zh) * | 2019-12-27 | 2022-08-30 | 耀鸿(嘉兴)电子科技有限公司 | 一种车用电动椅系统及控制方法 |
| US12044301B2 (en) | 2020-02-21 | 2024-07-23 | Lear Corporation | Track system with a support member |
| DE102020107243B4 (de) * | 2020-03-17 | 2024-02-08 | Ciar S.P.A. | Sitz- und Liegemöbel und Verfahren zum Verstellen eines Sitz- und Liegemöbels |
| DE102020113982A1 (de) * | 2020-05-25 | 2021-11-25 | Faurecia Autositze Gmbh | Kraftfahrzeugsitz |
| US11505141B2 (en) | 2020-10-23 | 2022-11-22 | Lear Corporation | Electrical system with track assembly and support assembly |
| DE102022120657A1 (de) | 2022-08-16 | 2024-02-22 | Faurecia Autositze Gmbh | Fahrzeugsitz mit Easy Entry-Verstellung |
| US12109918B2 (en) * | 2022-09-28 | 2024-10-08 | GM Global Technology Operations LLC | Integrated accessibility storage system |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2823949A (en) * | 1953-12-21 | 1958-02-18 | American Metal Prod | Adjusting means for the front seat of an automotive vehicle |
| DE3137150A1 (de) * | 1981-09-18 | 1983-04-07 | Robert Bosch Gmbh, 7000 Stuttgart | Einrichtung zur positionierung wenigstens zweier stellvorrichtungen fuer kraftfahrzeugsitze |
| DE3137151A1 (de) * | 1981-09-18 | 1983-04-07 | Robert Bosch Gmbh, 7000 Stuttgart | Einrichtung zur positionierung wenigstens einer verstellvorrichtung fuer kraftfahrzeugsitze |
| JPS5876336A (ja) * | 1981-10-29 | 1983-05-09 | Aisin Seiki Co Ltd | 車上シートの位置制御装置 |
| JPS61157040U (ja) * | 1985-03-23 | 1986-09-29 | ||
| EP0213482B1 (en) * | 1985-08-13 | 1991-01-02 | Aisin Seiki Kabushiki Kaisha | Apparatus for controlling the attitude of vehicle mounted device |
| DE3532608A1 (de) * | 1985-09-12 | 1987-03-19 | Grammer Sitzsysteme Gmbh | Sitz mit einem verstellbaren sitzflaechenelement |
| JPH0761782B2 (ja) * | 1986-12-04 | 1995-07-05 | アイシン精機株式会社 | 車上シ−トの姿勢制御装置 |
| DE3910778C2 (de) * | 1989-04-04 | 1996-10-17 | Daimler Benz Ag | Verfahren zur Steuerung von mindestens zwei, insbesondere der Sitzlängsbewegung und der Sitzlehnenneigungsbewegung zugeordneten Stellvorrichtungen eines Kraftfahrzeugsitzes |
| US5253138A (en) * | 1989-07-04 | 1993-10-12 | Ets Cousin Freres | Simplified supplying system of the position identification potentiometers of electronic memory mechanisms of a motor for setting automobile vehicle seats and the like |
| AT394829B (de) * | 1989-08-04 | 1992-06-25 | Schuster Wilhelm | Rueckenlehne fuer einen fahrzeugsitz, mit einer verstellbaren lendenstuetze |
| JPH0439164A (ja) * | 1990-06-04 | 1992-02-10 | Jidosha Denki Kogyo Co Ltd | オートドライビングポジション装置 |
| FR2664544B1 (fr) * | 1990-07-12 | 1993-12-17 | Faure Automobile Bertrand | Bloc de commande centralise pour siege de vehicule. |
| JPH04201745A (ja) * | 1990-11-30 | 1992-07-22 | Oki Electric Ind Co Ltd | 自動車用パワーシート |
| US5249839A (en) * | 1991-11-12 | 1993-10-05 | Steelcase Inc. | Split back chair |
| US5748473A (en) * | 1992-05-05 | 1998-05-05 | Automotive Technologies International, Inc. | Automatic vehicle seat adjuster |
| US6088640A (en) * | 1997-12-17 | 2000-07-11 | Automotive Technologies International, Inc. | Apparatus for determining the location of a head of an occupant in the presence of objects that obscure the head |
| FR2706826B1 (ja) * | 1993-06-24 | 1995-08-25 | Bfa | |
| DE4339113C2 (de) * | 1993-11-16 | 1996-09-05 | Daimler Benz Ag | Sitzbelegungserkennungseinrichtung in einem Kraftfahrzeug |
| FR2716649B1 (fr) * | 1994-02-25 | 1996-05-31 | Faure France Bertrand | Dispositif de positionnement longitudinal d'un siège de véhicule. |
| US5636898A (en) * | 1994-04-15 | 1997-06-10 | Burns Aerospace Corporation | Seat with recline linkage |
| US5497326A (en) * | 1994-08-03 | 1996-03-05 | The Cherry Corporation | Intelligent commutation pulse detection system to control electric D.C. motors used with automobile accessories |
| US5651587A (en) * | 1995-06-09 | 1997-07-29 | P.L. Porter Co. | Vehicle seat and system for controlling the same |
| FR2737164B1 (fr) * | 1995-07-25 | 1997-11-28 | Cesa | Ensemble de reglage de la position d'au moins deux organes d'un vehicule automobile |
| US6195603B1 (en) * | 1995-08-11 | 2001-02-27 | Lear Corporation | Multiple speed vehicle seat memory control apparatus |
| US5864105A (en) * | 1996-12-30 | 1999-01-26 | Trw Inc. | Method and apparatus for controlling an adjustable device |
| US6055473A (en) * | 1997-02-19 | 2000-04-25 | General Motors Corporation | Adaptive seating system |
| DE19734508C2 (de) * | 1997-08-08 | 2001-05-17 | Siemens Ag | Steuervorrichtung für ein Insassenschutzmittel eines Kraftfahrzeugs |
| US6157372A (en) * | 1997-08-27 | 2000-12-05 | Trw Inc. | Method and apparatus for controlling a plurality of controllable devices |
| JP3702606B2 (ja) * | 1997-09-29 | 2005-10-05 | アイシン精機株式会社 | 車両用シート構造 |
| US6220661B1 (en) * | 1999-04-19 | 2001-04-24 | Steelcase Development Inc. | Chair back and method of assembly |
| US5909923A (en) * | 1997-10-24 | 1999-06-08 | Steelcase Inc. | Chair with novel pivot mounts and method of assembly |
| US6030043A (en) * | 1997-12-18 | 2000-02-29 | Bertrand Faure Sitztechnik Gmbh & Co. Kg | Motor vehicle seat, in particular back seat |
| JP4265024B2 (ja) | 1998-06-22 | 2009-05-20 | トヨタ紡織株式会社 | リクライニング装置 |
| CN2351321Y (zh) * | 1998-09-01 | 1999-12-01 | 姚巨波 | 电动多功能汽车座椅 |
| US6079785A (en) * | 1999-01-12 | 2000-06-27 | Steelcase Development Inc. | Chair having adjustable lumbar support |
| US6179384B1 (en) * | 1999-04-21 | 2001-01-30 | Steelcase Development Inc. | Force adjusting device |
| DE19939183C1 (de) * | 1999-08-20 | 2000-10-05 | Daimler Chrysler Ag | Elektrische Verstelleinrichtung für einen Vordersitz eines Kraftfahrzeugs |
| CN2433118Y (zh) * | 2000-05-30 | 2001-06-06 | 朱丰 | 电动汽车座椅 |
| US6677720B2 (en) * | 2001-06-08 | 2004-01-13 | Dura Global Technologies, Inc. | Control system for vehicle seat |
| WO2003068552A1 (en) * | 2002-02-12 | 2003-08-21 | Johnson Controls Technology Company | Vehicle seat having an electronic control system |
-
2003
- 2003-06-18 AU AU2003243625A patent/AU2003243625A1/en not_active Abandoned
- 2003-06-18 AT AT03815170T patent/ATE470593T1/de not_active IP Right Cessation
- 2003-06-18 JP JP2004566416A patent/JP4105166B2/ja not_active Expired - Fee Related
- 2003-06-18 WO PCT/US2003/019174 patent/WO2004062961A1/en active Application Filing
- 2003-06-18 CN CNB038259621A patent/CN100447014C/zh not_active Expired - Fee Related
- 2003-06-18 EP EP03815170A patent/EP1587706B1/en not_active Expired - Lifetime
- 2003-06-18 US US10/541,370 patent/US20060208549A1/en not_active Abandoned
- 2003-06-18 DE DE60332963T patent/DE60332963D1/de not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP1587706A1 (en) | 2005-10-26 |
| AU2003243625A1 (en) | 2004-08-10 |
| US20060208549A1 (en) | 2006-09-21 |
| CN1741917A (zh) | 2006-03-01 |
| DE60332963D1 (de) | 2010-07-22 |
| JP2006512169A (ja) | 2006-04-13 |
| CN100447014C (zh) | 2008-12-31 |
| WO2004062961A1 (en) | 2004-07-29 |
| ATE470593T1 (de) | 2010-06-15 |
| EP1587706B1 (en) | 2010-06-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4105166B2 (ja) | 制御システムを備える自動車シート | |
| US7239096B2 (en) | Vehicle seat having an electronic control system | |
| US6195603B1 (en) | Multiple speed vehicle seat memory control apparatus | |
| US6677720B2 (en) | Control system for vehicle seat | |
| US20050173963A1 (en) | Vehicle seat with a support for the lower legs | |
| JP3492605B2 (ja) | 自動車の前部座席を調節する電気調節機 | |
| US5285139A (en) | Method and device for controlling motor in a powered seat | |
| KR20200051717A (ko) | 특성 맵 제어가 행해지는 시트 조절기 및 시트 조절 방법 | |
| US20100066142A1 (en) | Seat assembly with cushion tilt | |
| US20050071053A1 (en) | Seat device for vehicle | |
| CN112937394B (zh) | 用于车辆的头枕位置调节装置 | |
| KR100332208B1 (ko) | 차량용 헤드 레스트의 각도 조절장치 | |
| JP3303406B2 (ja) | 車両用シート制御装置 | |
| US5019765A (en) | Motor control device for powered seat | |
| CN111038341A (zh) | 电动座椅联动控制装置和方法 | |
| JPH03189244A (ja) | パワーシートのモータ制御方法およびモータ制御装置 | |
| JPH115479A (ja) | 車両用シート | |
| JPH02283534A (ja) | 車両用パワーシートのモータ制御装置 | |
| JPH0213215Y2 (ja) | ||
| JP2560465Y2 (ja) | 自動車用パワーシート | |
| JPH0513633Y2 (ja) | ||
| KR100371543B1 (ko) | 자동차용 가변형 시트 | |
| KR20050048239A (ko) | 차량의 경사조절 시트 | |
| JPH0327867Y2 (ja) | ||
| JPH0526691B2 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071030 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080130 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080326 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110404 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120404 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130404 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130404 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140404 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |