JP3920439B2 - ゴルフカート - Google Patents
ゴルフカート Download PDFInfo
- Publication number
- JP3920439B2 JP3920439B2 JP02001798A JP2001798A JP3920439B2 JP 3920439 B2 JP3920439 B2 JP 3920439B2 JP 02001798 A JP02001798 A JP 02001798A JP 2001798 A JP2001798 A JP 2001798A JP 3920439 B2 JP3920439 B2 JP 3920439B2
- Authority
- JP
- Japan
- Prior art keywords
- output
- sensor
- golf cart
- traveling
- inclination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Hydraulic Control Valves For Brake Systems (AREA)
Description
【発明の属する技術分野】
本発明は、ゴルフ場内での物品の搬送に用いられる自動走行可能なゴルフカートに関し、更に詳しくは、自動走行中の傾斜地での確実な停止又は発進を行わせるべく、ブレーキの制動力制御、及び/又は原動機の出力制御を行う構成としたゴルフカートに関する。
【0002】
【従来の技術】
ゴルフ場内で用いられるゴルフカートは、無謀な運転による事故の発生を防ぐと共に、コース上の芝生を保護することを目的として、コースに沿って設けられた所定の走行路(カート路)を自動走行するものが主流となっている。
【0003】
このゴルフカートは、車体前部に配された左右一対の検出コイルにより構成された誘導線センサと、車体前部の略中央に配された一つの検出コイルにより構成された標識センサとを備えると共に、走行速度の変更のため、エンジン、モータ等の走行用原動機の出力調整を行う原動機制御手段、及びブレーキによる制動力を調節するブレーキ制御手段を備え、更に、車体の操向のための操向手段を備えて構成されている。一方走行経路となるカート路には、交流電流が通電された誘導線が連続的に埋設してあり、また、速度の変更、停止等、走行条件の変更が必要な各位置に、これらの変更を指示するための標識マグネットが埋設してある。
【0004】
前述の如く構成されたゴルフカートは、利用者の乗車中には、例えば、乗車位置にて操作される走行スイッチのオンオフ操作に応じて、また非乗車中には、利用者により携帯されるリモコン発信器の操作によって発せられる操作信号の受信に応じて発進及び停止せしめられる。
【0005】
この発進から停止までの間には、前記誘導線の周囲に形成される磁界の作用により前記誘導線センサの一対の検出コイルに誘起される電圧を検出し、両検出コイルの誘起電圧の偏差を解消すべく操向手段を動作させ、前記誘導線を辿る操向制御が行われ、また、前記標識マグネットの埋設位置において標識センサの検出コイルに誘起される電圧を検出し、この検出に応じて予め設定された走行条件を実現すべく、原動機制御手段及びブレーキ制御手段を動作させることにより、走行速度の変更、停止を含めた走行条件の変更が行なわれ、このような走行条件の変更制御と、前記操向制御とにより、走行路上での自動走行を実現している。
【0006】
さて、以上の如く自動走行するゴルフカートは、コース上の定点(ティーグラウンド、グリーン等)近傍に設置された停止を指示する標識マグネット(定点標識)の検出に応じて自動停止せしめられるが、これらの定点以外での停止が必要な場合もあり、この停止は、前述の如く、乗車状態での走行スイッチのオフ操作、及び非乗車状態でのリモコン発信器の停止操作によって適宜に行わせ得るようになっている。
【0007】
しかしながら、ゴルフコースに沿って設けられるゴルフカートの走行路は、一般的に多くの傾斜地(上り坂、下り坂)を含んでおり、これらの傾斜地において停止操作、又は発進操作がなされたとき、上り坂での急停車、下り坂での急発進等の不都合が発生し、確実な停止又は発進が行えず、乗り心地の悪化を招くという問題がある。
【0008】
そこで従来から、本願出願人による特開平9-198139号公報等において、車体の適宜位置に走行路の傾斜を検出する傾斜センサを備え、前記停止又は発進操作が行われたとき、前記傾斜センサの出力を取り込み、この出力に基づいて得られた傾斜の方向及び程度に応じて原動機制御手段及びブレーキ制御手段の動作内容を変更して、走行路の傾斜の如何に拘わらず確実な停止又は発進を行わせ得るようにしたゴルフカートが提案されている。
【0009】
前記傾斜センサは、ハウジングの内部に垂下支持された振子と、該振子の揺動角度を検出する角度検出器とを備え、前記ハウジングをゴルフカートの車体の適宜位置に固定して用いられる。この傾斜センサにおいては、車体に固定されたハウジングに対する前記振子の相対的な揺動角度が前記角度検出器の出力として得られ、前記振子が常時鉛直を保つことから、前記出力に基づいて水平方向に対するハウジングの傾斜、即ち、該ハウジングが取り付けられた車体、及び該車体が置かれた走行路の傾斜を知ることができる。前記角度検出器としては、例えば、前記振子の支軸に取り付けたロータリエンコーダが用いられている。
【0010】
【発明が解決しようとする課題】
さて以上の如く構成された傾斜センサの出力は、ハウジングに対する振子の相対的な揺動角度を示すものであり、走行路の傾斜は、水平状態において得られる傾斜センサの出力を基準値として用い、この基準値と個々の検出時点において得られた出力とを比較した結果に基づいて求められている。
【0011】
従って、高い精度での傾斜検出を可能とするためには、傾斜センサのハウジングが、ゴルフカートの車体の適宜位置に正しく水平を保って取り付けられている必要がある。そこで従来においては、傾斜センサの取り付け段階において、ゴルフカートを水平な路面上に置き、傾斜センサの取り付け角度を自身の出力を監視しつつ調整し、前記基準値に近い出力が得られた位置にて取り付けを実施するようにしており、この取り付け作業が煩雑であり、多大の手間を要するという問題があった。
【0012】
また、この取り付けが正確に行われた場合であっても、出荷に至るまでのその後の製造工程において加えられる外力、並びに、出荷に伴う搬送中、及び使用状態において車体に加わる振動により傾斜センサの取り付け位置にずれが生じる虞れがあり、この場合、走行路の傾斜を高精度に検出し得ず、この検出結果に基づく前述した停止又は発進制御が良好に行えず、乗り心地の悪化を招くという問題があった。
【0013】
本発明は斯かる事情に鑑みてなされたものであり、走行路の傾斜角度を、傾斜センサの取り付け不良、又は取り付け後の位置ずれの如何に拘わらず正しく検出することができ、傾斜センサの取り付け作業の煩雑さを解消すると共に、傾斜の検出結果に基づく停止制御又は発進制御を確実に行わせ、長期に亘って良好な乗り心地を維持することができるゴルフカートを提供することを目的とする。
【0014】
【課題を解決するための手段】
本発明に係るゴルフカートは、所定の走行路に沿った自動走行が可能に構成してあり、走行のための原動機と、制動のためのブレーキと、走行路の傾斜を検出する傾斜センサとを備え、前記自動走行中の停止又は発進に際し、前記傾斜センサの出力を予め記憶させてある基準値と比較し、この比較結果に基づいて前記ブレーキが発生する制動力及び/又は前記原動機の出力を制御する構成としてあるゴルフカートにおいて、前記基準値の記憶内容の更新を指示する指示手段を備え、該指示手段の指示に従って前記傾斜センサの出力を取り込み、この出力に応じて前記基準値を更新する構成とし、前記指示手段の指示に従って得られた前記傾斜センサの出力が、傾斜センサが正しく取り付けられたゴルフカートが水平面上に置かれたときに本来得られるべき出力値の近傍に適宜の幅を有して設定された範囲外にあるとき、前記更新を禁じると共に報知する手段を備えることを特徴とする。
【0015】
本発明においては、前記指示手段による更新指示がなされたとき、傾斜センサの出力を取り込み、この出力を基準値として更新する。従って、製造、出荷又は運行中の適宜のタイミングにおいて、ゴルフカートを略水平な路面上に停止させた状態で指示手段を動作させることにより、このとき路面の傾斜に対応する傾斜センサの出力が基準値として更新され、以後は、更新時点における路面を水平面と見なした傾斜検出が行われる。
【0017】
この発明においては、指示手段による更新の指示に従って取り込まれた傾斜センサの出力が、予め設定された所定の範囲、例えば、傾斜センサが正しく取り付けられたゴルフカートが水平面上に置かれたときに本来得られるべき出力値の近傍に適宜の幅を有して設定された範囲の外にあるとき、前記操作手段の操作が傾斜を有した路面上にて誤ってなされたか、又は傾斜センサが誤作動状態にあると判定し、このとき得られた傾斜センサの出力による基準値の更新を禁じて、不確かな基準値を用いた傾斜検出に応じて不安定な制御が行われることを防止する。なおこの場合、ランプの点灯、警報音の発生等、適宜の警報を発して作業者に報知するのが望ましい。
【0020】
【発明の実施の形態】
以下本発明をその実施の形態を示す図面に基づいて詳述する。図1は、本発明に係るゴルフカートの外観を示す側面図、図2は、同じく内部の構成を模式的に示す平面図である。
【0021】
図示の如くゴルフカート1は、左右各一対の前輪2,2及び後輪3,3により支持された車体フレーム4の上部を、フロントカウル4a及びリアカウル4bにより覆うと共に、リアカウル4bの前側に着座のための座席5aとステップ5bとを設置して乗車部5を構成し、前記座席5aへの着座姿勢にて操作可能な位置に突設されたステアリングコラム6aの上端に、操向のためのステアリングホイール6を取付けて構成されている。
【0022】
乗車部5の上側は、フロントカウル4aから後上方に向けて突設された左右一対のサポート7a,7a(片側のみ図示)に支持されたルーフ板7bにより囲われ、同じく前側は、前記サポート7a,7a間に架設された風防板7cにより前方の透視が可能に囲われており、座席5aに着座した乗員を風雨から保護するようになしてある。また乗車部5の後側には、ゴルフバッグ等の大嵩な物品を搭載し、適宜に固定可能に載置フレーム7dが突設してあり、乗車部5の前側には、グローブ、帽子等の小嵩の物品を収納するための小物入れ7eが取付けてある。
【0023】
以上の如きゴルフカート1は、後輪3,3を駆動輪とし、前輪2,2の操向により方向を変えて、乗車部5の座席5aに着座した運転者の手動操作に応じた手動走行と、所定の走行路上にて後述の如く行われる自動走行とにより走行する。
【0024】
前輪2,2は、車体フレーム4の前部に横架されたフロントアクスル20の両端部に取付けてあり、該フロントアクスル20の後側に並設されたラック軸21の両端に、各別のナックルアーム22,22を介して連結されている。ラック軸21は、これを収納するラックハウジング23の内部において図示しないピニオンに噛合しており、該ピニオンは、前記ステアリングコラム6aの内部に支持され、ステアリングホイール6の回転に伴って回転するステアリングシャフト6bの下端に、ユニバーサルジョイント24を介して連結されている。
【0025】
而して、ステアリングホイール6の操作がなされた場合、ユニバーサルジョイント24を介して前記ピニオンが回転し、この回転がラック軸21の軸長方向の移動に変換され、この移動によりナックルアーム22,22が揺動し、前輪2,2は、ステアリングホイール6の操作方向に操作量に相当する角度だけ操向される。これにより手動走行時の操向が可能となる。
【0026】
また、前記ラックハウジング23の中途部には、ステアリングモータM1 が取付けてあり、該ステアリングモータM1 の出力端は、ラックハウジング23の内部に延設され、図示しないピニオンを介して前記ラック軸21に噛合させてある。
【0027】
而して、ステアリングモータM1 が回転した場合、この回転が前記ピニオンを介してラック軸21に伝達され、該ラック軸21の軸長方向の移動によりナックルアーム22,22が揺動せしめられ、前輪2,2は、ステアリングモータM1 の回転方向に回転量に相当する角度だけ操向される。このステアリングモータM1 は、自動走行中のゴルフカート1の操向手段として、車体フレーム4の適宜位置、図においては中央部近傍に搭載された走行制御部10から与えられる駆動信号に応じて回転駆動される。なお走行制御部10は、これに付随する各種の回路と共に、保護ボックス 10aに収納されており、利用者による無為な接触を防ぐと共に、風雨、各部からの電磁ノイズの影響による誤作動を防ぐようにしてある。
【0028】
一方、駆動輪となる後輪3,3は、車体フレーム4の後側略中央部に横置き固定されたエンジンEにより駆動される。該エンジンEの出力端には、遠心クラッチ30が付設された駆動プーリ31が嵌着されている。また車体フレーム4には、エンジンEのやや後側に位置して、後輪3,3の車軸を収納するリアアクスル32が架設され、これの上側中央部にトランスミッションTが固定してある。
【0029】
エンジンEの出力端と同側に突設されたトランスミッションTの入力端には、従動プーリ33が嵌着してあり、エンジンEの出力は、駆動プーリ31と従動プーリ33との間に巻架された伝動ベルト34を介してトランスミッションTに伝達され、該トランスミッションTの下部に連設されたディファレンシャルギヤD(図1参照)により分配されて、左右の後輪3,3に伝達される。
【0030】
エンジンEの外側には、スロットルモータM2 が取付けてある。スロットルモータM2 は、その回転によりスロットルワイヤ37を巻き取り、エンジンEに内蔵された図示しないスロットル弁を開閉する動作をなすものであり、該エンジンEの出力は、スロットルモータM2 の正逆転に応じて増減される。
【0031】
スロットルモータM2 は、自動走行中におけるゴルフカート1の走行速度を調整すべく、前記走行制御部10から与えられる駆動信号に応じて回転駆動される。この回転に応じて定まるスロットル開度は、ポテンシオメータ等を用いてなるスロットル開度センサ50により、スロットルモータM2 の回転角度を媒介として検出され、走行制御部10に与えられている。
【0032】
一方、手動走行中のゴルフカート1の速度調整は、乗車部5のステップ5b上に突設されたアクセルペダルAPの踏圧操作に応じて行われる。このアクセルペダルAPは、前記スロットルワイヤ37に機械的に連結されておらず、手動走行中の速度調整は、アクセルペダルAPの踏み込み量を、これの枢支位置に取付けたポテンシオメータ等を用いてなるアクセルセンサ51により検出し、この検出結果に基づく走行制御部10の動作により前記スロットルモータM2 を駆動して、エンジンEの出力を調整する手順により行われている。
【0033】
また左右の後輪3,3には、これら夫々に制動力を加えるためのブレーキ40,40が付設してある。これらのブレーキ40,40は、乗車部5のステップ5b上に突設されたブレーキペダルBPに、図中に2点鎖線により示すブレーキワイヤ41,41を介して連結されている。また、ブレーキペダルBPの配設位置の後方の車体フレーム4上には、ブレーキモータM3 が取付けてあり、該ブレーキモータM3 の出力端は、減速装置を介してブレーキワイヤ41,41に連結されている。
【0034】
而してブレーキワイヤ41,41は、ブレーキペダルBPの踏み込み、又はブレーキモータM3 の回転によって引っ張られ、この引っ張りに応じてブレーキ40,40が発生する制動力が後輪3,3に夫々加えられる。ブレーキペダルBPの踏み込みとブレーキモータM3 の回転との干渉は、夫々とブレーキワイヤ41,41との間に介装された図示しないリンク機構により吸収されるようになしてある。
【0035】
ブレーキモータM3 は、自動走行中のゴルフカート1を停止、又は減速させるべく、前記走行制御部10から与えられる駆動信号に応じて回転駆動される。このとき後輪3,3に加わるブレーキ力は、ポテンシオメータ等を用いてなるブレーキセンサ52により、ブレーキモータM3 の回転角度を媒介として検出され、前記走行制御部10に与えられている。
【0036】
エンジンEから後輪3,3に至る伝動系の中途には、図2に示す如く、前記トランスミッションTの一側に並設された態様にて駐車ブレーキ8が設けてある。この駐車ブレーキ8は、停止状態にあるゴルフカート1の無為な移動を防止すべく、トランスミッションT、及びディファレンシャルギヤDを介して左右の後輪3,3に機械的な制動力を加える動作をなすものであり、この制動は、前記走行制御部10からの動作指令により、アクチュエータとしての電磁シリンダSに通電せしめることにより解除される。
【0037】
またゴルフカート1の前部には、その中途部をフロントアクスル20の略中央に枢支してセンサアーム60が取付けてある。該センサアーム60は、車体フレーム4の下側にて前輪2,2の前方に至るまで延設され左右両側に分岐されており、両分岐端には、前輪2,2及び後輪3,3が接地する路面に対向せしめて一対の誘導線センサ61,61が取付けてある。センサアーム60の後端は、ラックハウジング23内部のラック軸21に係合され、ラック軸21と共に左右に移動するようになしてある。この構成により、センサアーム60前部の誘導線センサ61,61は、ラック軸21の移動に伴う前輪2,2の操向に追随して、前記路面と略平行をなす面内にて左右両側に揺動することになる。
【0038】
また、ラックハウジング23のやや後側の車体フレーム4の底面には、幅方向の中央から一側にずらせた位置に、前輪2,2及び後輪3,3が接地する路面に対向せしめて標識センサ62が取付けてある。
【0039】
前記誘導線センサ61,61及び標識センサ62はいずれも、周辺磁場の作用により誘起電圧を発生するコイルであり、前者は、路面下に埋設されて交流電流が通電される誘導線9aの周囲に形成される磁界を検出対象とし、また後者は、路面下の所要位置に埋設されたされた標識マグネット9bにより形成される磁界を検出対象とする。誘導線センサ61,61及び標識センサ62の検出結果は、これらに誘起される電圧信号として前記走行制御部10に与えられている。
【0040】
更にゴルフカート1の前部には、該ゴルフカート1が走行する路面の傾斜を検出する傾斜センサ9が取り付けてある。この傾斜センサ9は、公知の如く、ハウジングの内部に垂下支持された振子と、該振子の揺動角度を検出するロータリエンコーダとを備え、前記ハウジングをゴルフカート1に固定して、走行路面の傾斜に応じて生じる前記振子の揺動角度の変化を、前記ロータリエンコーダの出力として取り出す構成としたものである。
【0041】
本発明において検出対象とするのは、ゴルフカート1の前後方向における走行路面の傾斜であり、傾斜センサ9は、前記振子の揺動が前後方向に生じるように方向を定めて取り付けられている。また傾斜センサ9の取り付け位置は、風雨に曝されることがなく、車体フレーム4からの振動の伝播が少なく、乗車部5上の利用者による接触の虞れが小さいという各条件を満たし、更に、前記ハウジングを略水平に保つことが可能な位置であればよく、図1には、フロントカウル4aの上部内面に傾斜センサ9を取り付けた例が示してある。
【0042】
以上の如く取り付けられた傾斜センサ9の出力、より具体的には、振子の揺動角度を検出するロータリエンコーダの出力は、前記走行制御部10に与えられている。走行制御部10は、傾斜センサ9からの入力に基づいてゴルフカート1が走行する路面の傾斜角度αを、その正負(上り、下り)を含めて求め、この結果を、自動走行中に行われる後述の停止制御及び発進制御のために利用している。
【0043】
図3は、傾斜センサ9の動作説明図である。傾斜センサ9は、ゴルフカート1の車体の一部に固定されたハウジング90の内部に、その上部を揺動軸91により支えて振子92を垂下支持し、該振子92が、車体の前後方向(図の左右方向)に揺動し得るように構成されている。
【0044】
ゴルフカート1は、その走行中、前輪2,2及び後輪3,3が接地する走行路面の傾斜に応じて前後(及び左右)に傾斜する。図3(a)は、ゴルフカート1が略水平な路面上にある場合を、図3(b)は、ゴルフカート1が、前後に傾斜した路面上にある場合を夫々示している。
【0045】
これらの各場合において、ゴルフカート1の車体に固定された傾斜センサ9のハウジング90は、ゴルフカート1の傾斜に応じて傾斜する一方、振子92は、常に鉛直な垂下状態を保とうとし、該振子92は、ハウジング90に対して相対的に揺動する。従って、この揺動角度の変化を振子92の揺動軸91に取り付けたロータリエンコーダ93の出力として取り出すことにより、ハウジング90に対する振子92の揺動角度、即ち、ゴルフカート1の前後方向の傾斜角度αを知ることができる。
【0046】
但し、図3(b)に示す傾斜状態において得られる傾斜センサ9(ロータリエンコーダ93)の出力Kは、振子92の相対的な揺動角度を示すものであり、ゴルフカート1の傾斜角度αは、図3(a)に示す水平状態において得られる傾斜センサ9の出力K0 を基準値として用い、両者の偏差(=K−K0 )に所定の定数βを乗じることにより求められる。
【0047】
α=β(K−K0 ) …(1)
【0048】
図4は、以上の如く構成されたゴルフカート1の制御系の構成を示すブロック図である。マイクロプロセッサを用いてなる走行制御部10の入力側には、前記スロットル開度センサ50、アクセルセンサ51及びブレーキセンサ52の検出信号が夫々与えられている。また左右の誘導線センサ61,61の誘起電圧は、各別の増幅器63,63により増幅されて比較器64に入力され、この比較器64の出力、即ち、両センサ61,61の誘起電圧の偏差信号が走行制御部10に与えられている。更に標識センサ62の誘起電圧は、増幅器65により増幅され、波形整形回路66により整形されて走行制御部10に与えられている。
【0049】
また走行制御部10の入力側には、前記傾斜センサ9の出力Kが与えられていると共に、該傾斜センサ9の出力Kから傾斜角度αを前述の如く算出する際に用いる前記基準値K0 の更新を指示する指示手段として、更新スイッチ11が接続されている。この更新スイッチ11は、後述する如く、製造時又はメインテナンス時に夫々の作業者により操作されるものであり、走行制御部10を収納する前記保護ボックス 10aの内部等、ゴルフカート1の利用者により誤って操作される虞れのない位置に配設されている。
【0050】
更に走行制御部10の入力側には、モード選択スイッチ12及び走行スイッチ13が接続され、また車体の適宜位置に搭載されたリモコン受信器14の出力信号、及びゴルフカート1の走行速度を検出する車速センサ 16a,16bの出力信号が夫々与えられている。
【0051】
モード選択スイッチ12は、前述した自動走行及び手動走行のいずれによって走行するかを選択するものであり、走行制御部10は、モード選択スイッチ12からのオンオフ信号に応じて自動走行及び手動走行のいずれが選択されたかを認識する構成となっている。また走行スイッチ13は、乗車部5に乗車した利用者が発進及び停止手段として使用するものであり、更にリモコン受信器14は、利用者により携帯されるリモコン発信器15の操作に応じて発せられる操作信号(発進信号及び停止信号)を受信し、この受信結果を出力するものであり、これらからの入力に応じた走行制御部10の所定の動作によりゴルフカート1は、走行スイッチ13のオン操作又はリモコン発信器15の発進操作に応じて発進せしめられ、また走行スイッチ13のオフ操作、リモコン発信器15の停止操作、又は定点停止用の標識マグネット9bの検出に応じて停止せしめられる。
【0052】
また前記車速センサ 16a,16bとしては、トランスミッションTから後輪3,3までの伝動系の適宜位置に取付けたスリット円板と、これを挾んで配されたフォトインタラプタとを備え、後輪3,3の一回転当たり複数のパルス信号を得て、F/V変換器により後輪3,3の回転速度、即ち、ゴルフカート1の車速に対応する出力を得るようにしたものを用いることができる。一方の車速センサ 16aの出力は、自動走行に際し、標識マグネット9bにより指定される目標速度との比較、及び走行距離の算定に用いられている。他方の車速センサ 16bの出力は、前記車速センサ 16aの故障判定に用いられており、該車速センサ 16bとしては、主たる車速センサ 16aに比して、後輪3,3の一回転当たりに得られるパルス数が十分に少ないものが用いられている。
【0053】
一方走行制御部10の出力側には、前記ステアリングモータM1 、スロットルモータM2 、及びブレーキモータM3 が各別の駆動回路D1 ,D2 ,D3 を介して接続されており、各モータM1 ,M2 ,M3 は、走行制御部10から各別に与えられる駆動信号に応じて回転駆動され、夫々の動作、即ち、前輪2,2の操向、エンジンEの出力調整、及び後輪3,3の制動を行う構成となっている。
【0054】
また走行制御部10の出力側には、駐車ブレーキ8のブレーキシリンダSが、通電回路S1 を介して接続されており、前述した如く駐車ブレーキ8は、走行制御部10からの出力に応じてブレーキシリンダSが通電されたとき、後輪3,3の制動を解除する動作をなす。
【0055】
以上の如く構成された走行制御部10は、エンジンEを起動するための図示しないキースイッチのオン操作により電源に接続されてその動作を開始し、入力側に接続されたモード選択スイッチ12のオンオフ状態に応じて、手動走行及び自動走行のいずれが選択されたかを認識する。
【0056】
手動走行が選択されている場合、走行制御部10は、入力側に接続されたアクセルセンサ51からの入力に応じてアクセルペダルAPの踏込み量を認識し、この踏込み量に応じたスロットル開度を得るべく、出力側のスロットルモータM2 を駆動しエンジンEの出力を調整する動作を行う。このとき、スロットル開度センサ50からの入力は、現状のスロットル開度を示すフィードバック信号として利用される。
【0057】
手動走行中の制動は、ブレーキペダルBPの踏込みをブレーキワイヤ41,41を介してブレーキ40,40に伝え、後輪3,3を制動することにより、また手動走行中の操向は、ステアリングホイール6の回転を前述した操向機構に伝えることにより、夫々機械的に行われる。
【0058】
自動走行が選択されている場合、走行制御部10は、入力側に接続された誘導線センサ61,61及び標識センサ62の出力を逐次取り込み、前者の出力、即ち、前記比較器64が出力する両誘導線センサ61,61の誘起電圧の偏差信号により、走行路に埋設された誘導線9aからのずれ量を認識し、このずれ量を解消すべく出力側のステアリングモータM1 に駆動信号を与え、前輪2,2を操向せしめる動作をなす。これによりゴルフカート1は、幅方向の中央部が前記誘導線9aを辿るように操向される。
【0059】
また走行制御部10は、標識センサ62の出力により、走行路の適宜位置に埋設された標識マグネット9bにより指示される走行条件を認識し、この走行条件を満足すべく出力側のスロットルモータM2 及びブレーキモータM3 に駆動指令を発し、エンジンEの出力を調整し、またブレーキ40,40による制動力を調整する動作を行う。これによりゴルフカート1は、標識マグネット9bにより指示される速度を保って走行路上を走行し、また、各ホールのティーグラウンド近傍、グリーン近傍等、ホール形態に対応させて走行路上に設定された定点にて停止せしめられる。
【0060】
このように行われる自動走行の間、前記車速センサ 16aの出力が、現状の車速を示すフィードバック信号として利用される。車速センサ 16aの出力として得られる車速は、自動走行中のゴルフカート1の暴走を防止し、安全な走行を実現するために重要な検出値であり、走行制御部10は、自動走行中の適宜のタイミングでの割込み処理により、図5に示すフローチャートに従って車速センサ 16aの故障判定処理を行う構成としてあり、このとき、入力側に与えられる他方の車速センサ 16bの出力が利用される。
【0061】
この故障判定処理において走行制御部10は、まず、車速センサ 16bからの入力パルスの有無を監視し(ステップ1)、この入力があった時点で車速センサ 16aからの入力パルスのカウントを開始し(ステップ2)、このカウントを車速センサ 16bからの次の入力パルスがある(ステップ3)まで継続する。そして、車速センサ 16bからの入力があったとき、車速センサ 16aからの入力パルスのカウント値が正常範囲にあるか否かを調べ(ステップ4)、正常範囲にある場合、車速センサ 16aにより正常な検出がなされていると判定して故障判定処理を終える。
【0062】
一方、ステップ1において車速センサ 16bからの入力パルスが与えられなかったとき、及びステップ4の判定において前記カウント値が正常範囲外にあると判定された場合、車速センサ 16a(又は車速センサ 16b)に異常があると判定し、走行制御部10は、出力側のスロットルモータM2 に動作指令を発し、エンジンEへの燃料供給を遮断して該エンジンEを停止させて故障判定処理を終える。
【0063】
以上の動作において、ステップ3の完了後に得られるカウント値は、車速センサ 16bが発する入力パルスの間に車速センサ 16aから何回の入力パルスが発せられたかを示す値となっている。前述した如く車速センサ 16bとしては、後輪3,3の一回転当たりに得られるパルス数が、車速センサ 16aのそれに比して十分に少ないものが用いられており、前記カウント値は、車速センサ 16a,16bが共に正常に動作しているとき、これらに設定された一回転当たりのパルス数の比となるべきである。
【0064】
ステップ4においては、ステップ3において得られたカウント値が前記パルス数の比の前後の所定の範囲内にあるか否かの判定がなされており、これにより、車速センサ 16aの検出値が正常であるか否かを確実に判定することができる。またこの異常判定は、車速センサ 16bの出力が異常である場合にもなされ、異常判定に応じてエンジンEを停止させる構成としたから、自動走行中に誤った車速の検出結果に基づく異常な速度調整が実施され、ゴルフカート1が暴走する虞れを未然に防止することができる。
【0065】
また、以上の如き自動走行中に走行制御部10は、入力側に接続された走行スイッチ13、及びリモコン受信器14からの入力を監視し、これらの入力に応じて出力側のスロットルモータM2 及びブレーキモータM3 に駆動指令を発する動作をなす。これによりゴルフカート1は、走行スイッチ13のオフ操作、リモコン発信器15の停止操作に応じて停止し、走行スイッチ13のオン操作、リモコン発信器15の発進操作に応じて走行を再開することとなる。この動作は、前記定点以外の適宜位置での停止、及びその後の発進を可能とし、利用者の便益を図るために必要である。
【0066】
以上の如く行われる停止、及びその後の発進は、前記定点でのそれらとは異なり、走行路に含まれる上り坂、下り坂等の傾斜地において行われることがある。走行制御部10は、傾斜センサ9の出力からゴルフカート1が置かれた走行路の傾斜角度αを算出し、この傾斜角度αに応じて、前記スロットルモータM2 及びブレーキモータM3 の駆動、並びにブレーキシリンダSの作動を制御し、傾斜の如何に拘わらず安定した停止を実現するための停止制御、同じく安定した発進を実現するための発進制御を行う。
【0067】
図6は、停止制御の一例を示すフローチャート、図7は、発進制御の一例を示すフローチャートである。
【0068】
まず停止制御の内容について説明する。自動走行中に走行制御部10は、前記走行スイッチ13及びリモコン受信器14からの入力により前述した停止操作がなされたか否かを常時監視し(ステップ11)、停止操作がなされた場合、入力側に接続された傾斜センサ9の出力を取り込み、これを前記(1)式に適用してゴルフカート1が走行している路面の傾斜角度αを算出する(ステップ12)。
【0069】
次いで、算出された傾斜角度αの絶対値が、10°以上であるか否か(ステップ13)、5°以上であるか否か(ステップ14)を夫々判定し、傾斜が10°以上であるときには、駐車ブレーキ8の作動タイミングを示す時間Tを0(sec)に設定し(ステップ15)、傾斜角度が5°以上10°未満であるときには、前記時間Tを1.0(sec)に(ステップ16)、傾斜角度が5°未満である場合には、前記時間Tを1.5(sec)に(ステップ17)に夫々設定する。
【0070】
その後、出力側のスロットルモータM2 及びブレーキモータM3 に動作指令を発し、エンジンEの出力を減じると共に、ブレーキ40,40を作動させる(ステップ18)。そして、この状態で車速センサ 16aにより検出される車速を監視し、これが所定の下限車速(例えば、1km/sec)未満となったとき(ステップ19)、その後前記時間Tが経過したか否かを判定し(ステップ20)、この経過時点において出力側のブレーキシリンダSに動作指令を発して駐車ブレーキ8を作動させる(ステップ21)と共に、ブレーキモータM3 への動作指令を停止しブレーキ40,40の作動を解除して(ステップ22)、一連の停止制御動作を終える。
【0071】
以上の停止制御動作によれば、エンジンEの出力低下とブレーキ40,40の作動とにより減速するゴルフカート1の車速が前記下限車速を下回った時点、即ち、停止寸前の状態にあるゴルフカート1に駐車ブレーキ8により制動力が加え始められるまでの時間が走行路の傾斜αの大小に応じて変更され、走行路の傾斜角度αが大きい場合には短く、逆に小さい場合には長くされる。
【0072】
駐車ブレーキ8は、その制動力により停止状態を保つ作用をなすものであり、その負荷容量は減速のためのブレーキ40,40と比して小さいが、駐車ブレーキ8を作動させないままブレーキ40,40による制動を解除すると、停止後にゴルフカート1が移動する虞れがあり、この移動の虞れは、停止位置における路面の傾斜角度が大となるに従って増大する。
【0073】
図6に示す制御動作は、このような事情に従って行われるものであり、停止操作がなされた時点での路面の傾斜角度αが10°以上、即ち、急な坂道の中途において停止操作が行われた場合には、駐車ブレーキ8は、ゴルフカート1の車速が下限車速を下回った直後に作動せしめられるから、停止後のゴルフカート1が急な傾斜に沿って移動することを防止でき、確実な停止状態が得られる。
【0074】
一方、停止操作がなされた時点での路面の傾斜角度αが5°未満、即ち、略平坦な路面上にて停止操作が行われた場合、駐車ブレーキ8は、ゴルフカート1の車速が下限車速を下回った後、十分な時間(1.5sec)が経過するまで作動しないから、該駐車ブレーキ8の制動力が、停止前の回転中の後輪3,3に加えられ、駐車ブレーキ8が過負荷状態となり、早期に損耗する等の不都合の発生を緩和し得る。
【0075】
なお、以上の停止制御動作に加えて、例えば、走行路面の傾斜角度αの検出結果をブレーキモータM3 のデューティー制御に用い、下り、上り及び平坦の各場合においてブレーキ40,40の効き具合を加減するようにしてもよく、これにより安定した制動が可能となる。
【0076】
次に、図7のフローチャートに従って実施される発進制御の動作内容について説明する。この発進制御は、ゴルフカート1が停止していることを条件として行われ、停止中に走行制御部10は、前記走行スイッチ13及びリモコン受信器14からの入力により発進操作がなされたか否かを監視し(ステップ31)、発進操作がなされた場合、入力側に接続された傾斜センサ9の出力を取り込み、これを(1)式に適用してゴルフカート1が停止している路面の傾斜角度αを算出する(ステップ32)。
【0077】
次いで、算出された傾斜角度αに応じてスロットル開度の目標値、及びブレーキデューティーを夫々設定する(ステップ33)。スロットル開度の目標値は、正負を含めて傾斜角度αの大小に応じて大小となるように、またブレーキデューティーは、傾斜角度αの絶対値の大小に応じて大小となるように、連続的又は段階的に設定される。即ち、スロットル開度の目標値は、ゴルフカート1が停止している路面が、急な下り坂であるとき最小値、急な上り坂であるときに最大値、平坦な路面であるとき中間値となるのに対し、ブレーキデューティーの目標値は、上り下りの如何に拘わらず急な傾斜を有する路面において最大値となり、平坦な路面において最小値となる。
【0078】
この後走行制御部10は、先に設定されたスロットル開度の目標値を得るべくスロットルモータM2 を駆動し、先に設定されたブレーキデューティーを有するPWM信号によりブレーキモータM3 を駆動し(ステップ34)、前記スロットル開度センサ50から与えられる現状のスロットル開度を示すフィードバック信号が前記目標値と略一致したとき(ステップ35)、出力側のブレーキシリンダSに動作指令を発し、該ブレーキシリンダSの動作により駐車ブレーキ8を解除し(ステップ36)、その後、ブレーキモータM3 に与えるPWM信号のデューティーを徐々に低下させてブレーキ40,40による制動を解除して(ステップ37)、一連の発進動作を終える。
【0079】
このような動作により、発進に際し、停止状態を保つための駐車ブレーキ8の制動解除前に、路面の傾斜に応じた強さにてブレーキ40,40を制動動作させるから、発進に際してのエンジンEの出力上昇による駐車ブレーキ8の負荷増大を防ぐことができ、更に、下り坂においては小さく、上り坂においては大きいスロットル開度を実現して、エンジンEの出力を下り坂においては低く、上り坂においては高く保った状態とし、その後駐車ブレーキ8の制動解除、ブレーキ40,40にの制動解除を行うから、上り坂においては、大なるエンジン出力により確実な発進が、また下り坂においては、小なるエンジン出力により滑らかな発進が夫々実現される。
【0080】
以上の如き停止制御及び発進制御動作は、傾斜センサ9の出力に基づいて算出された路面の傾斜角度αが用いられており、両制御を安定して行わせるには、傾斜角度αの算出結果が正確であることが必要である。しかしながら、傾斜角度αの算出には、前述の如く、傾斜センサ9が正しく水平に取り付けられたときに得られるべき出力K0 を基準値として用いてある一方、ゴルフカート1の製造工程において傾斜センサ9を正しく水平に取り付けることは困難であり、また運行中における振動等の外力の作用により、取り付け位置にすれが生じることがあり、このように位置ずれを生じた傾斜センサ9の出力Kを前記(1)式に適用したとしても、得られる傾斜角度αは不正確なものとなる。
【0081】
本発明においては、このような不都合を解消するために、走行制御部10の入力側に接続された更新スイッチ11が設けてある。この更新スイッチ11は、前述の如く、ゴルフカート1の利用者により誤って操作される虞れがないように、走行制御部10を収納する前記保護ボックス 10aの内部に設けてあり、製造工程の中途の適宜のタイミング、又は運行開始後のメインテナンス作業に際し、ゴルフカート1を略水平と見なし得る路面、又は作業台上に載置した状態において夫々の作業者により操作される。
【0082】
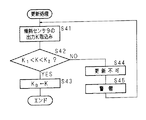
この更新スイッチ11が操作されたとき、走行制御部10は、図8に示すフローチャートに従って、前記傾斜角度αの算出基準となる基準値K0 を更新する動作をなす。図8に示す更新処理は、更新スイッチ11のオン操作に応じて開始され、走行制御部10は、傾斜センサ9の出力Kを取り込み(ステップ41)、この出力Kが予め設定された下限値K1 と上限値K2 との間にあるか否かを判定する(ステップ42)。
【0083】
前記下限値K1 及び上限値K2 は、傾斜センサ9の出力の中間値の前後に所定の幅を有して設定されたものである。例えば、走行制御部10への入力に際し、傾斜センサ9の最大出力を 256ビットのディジタル値に変換して取り込むようにした入力インタフェースを備える場合、前記下限値K1 は、 256ビットの半値である 128ビットに対し、前記下限値K1 は 113ビットに、上限値K2 は 143ビットに夫々設定することができる。
【0084】
ステップ42での判定の結果、傾斜センサ9の出力Kが、前記下限値K1 と上限値K2 との間の範囲にあると判定された場合、走行制御部10は、前記基準値K0 の記憶領域に現在の出力Kを書込み(ステップ43)、更新処理を終了する。以上の如き更新がなされた場合、この基準値、即ち、更新処理を行った時点においてゴルフカート1が置かれた路面、又は作業台を水平とした傾斜検出が行われることとなり、前記路面又は作業台が略水平である場合、更新後の基準値K0 の使用により、実用上十分な精度にて傾斜角度αの算出が可能となる。
【0085】
また一方、ステップ42での判定の結果、傾斜センサ9の出力Kが前記範囲外にあると判定された場合、傾斜センサ9が、故障又は過大な位置ずれ状態にあり、現状における傾斜センサ9の出力Kが基準値K0 の更新に適しないと判定し(ステップ44)、ランプの点灯、警報音の発生等、適宜の警報を発して作業者に報知し(ステップ45)、その後、ステップ41に戻って前述した動作を繰り返す。
【0086】
即ち、更新不可と判定された場合、警報の発生が継続して行われることとなり作業者は、更新スイッチ11をオフ操作して、更新処理モードを一旦解除し、傾斜センサ9の交換、取り付け状態の調整等、更新不可の原因を排除した後、再度更新スイッチ11をオン操作することにより傾斜検出を可能とすることができる。なお、ステップ41での傾斜センサ9の出力Kの取り込みを複数回行い、これらの平均値に基づいてステップ42以降の動作を行わせる構成としてもよい。
【0087】
【発明の効果】
以上詳述した如く本発明に係るゴルフカートにおいては、傾斜センサの出力に基づいて走行路の傾斜角度を求める際に用いられる基準値を、指示手段による更新指示に応じて更新する構成としてあるから、ゴルフカートを略水平な路面上に停止させた状態で指示手段を動作させることにより、このとき路面の傾斜に対応する傾斜センサの出力が基準値として更新され、以後は、更新時点における路面を水平面と見なした傾斜検出が行われ、製造時における傾斜センサの取り付けに多大の手間を要することなく、また運行に伴って傾斜センサに位置ずれが生じた場合においても、実用上十分な精度での傾斜検出が可能となり、この傾斜検出に応じた停止及び/又は発進制御を確実に行わせることができる。
【0088】
また、指示手段の指示に従う更新処理の時点において得られた傾斜センサの出力が所定の範囲外にあるとき、更新を禁じる構成としたから、指示手段の誤った操作、傾斜センサの故障等に起因して得られる不確かな検出値により基準値が更新される虞れがなく、この基準値を用いた傾斜検出に応じて不安定な制御が行われることを未然に防止することができる。
【図面の簡単な説明】
【図1】本発明に係るゴルフカートの外観を示す側面図である。
【図2】本発明に係るゴルフカートの内部構成を模式的に示す平面図である。
【図3】傾斜センサの動作説明図である。
【図4】本発明に係るゴルフカートの制御系の構成を示すブロック図である。
【図5】車速センサの故障判定処理の内容を示すフローチャートである。
【図6】傾斜センサの検出結果に基づいて行われる停止制御の一例を示すフローチャートである。
【図7】傾斜センサの検出結果に基づいて行われる発進制御の一例を示すフローチャートである。
【図8】更新スイッチの操作に応じて行われる基準値更新処理の内容を示すフローチャートである。
【符号の説明】
1 ゴルフカート
9 傾斜センサ
9a 誘導線
9b 標識マグネット
10 走行制御部
11 更新スイッチ
12 モード選択スイッチ
13 走行スイッチ
14 リモコン受信器
15 リモコン発信器
16a 車速センサ
16b 車速センサ
40 ブレーキ
50 スロットル開度センサ
51 アクセルセンサ
52 ブレーキセンサ
61 誘導線センサ
62 標識センサ
E エンジン
M1 ステアリングモータ
M2 スロットルモータ
M3 ブレーキモータ
S ブレーキシリンダ
Claims (1)
- 所定の走行路に沿った自動走行が可能に構成してあり、走行のための原動機と、制動のためのブレーキと、走行路の傾斜を検出する傾斜センサとを備え、前記自動走行中の停止又は発進に際し、前記傾斜センサの出力を予め記憶させてある基準値と比較し、この比較結果に基づいて前記ブレーキが発生する制動力及び/又は前記原動機の出力を制御する構成としてあるゴルフカートにおいて、前記基準値の記憶内容の更新を指示する指示手段を備え、該指示手段の指示に従って前記傾斜センサの出力を取り込み、この出力に応じて前記基準値を更新する構成とし、前記指示手段の指示に従って得られた前記傾斜センサの出力が、傾斜センサが正しく取り付けられたゴルフカートが水平面上に置かれたときに本来得られるべき出力値の近傍に適宜の幅を有して設定された範囲外にあるとき、前記更新を禁じると共に報知する手段を備えることを特徴とするゴルフカート。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP02001798A JP3920439B2 (ja) | 1998-01-30 | 1998-01-30 | ゴルフカート |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP02001798A JP3920439B2 (ja) | 1998-01-30 | 1998-01-30 | ゴルフカート |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11216211A JPH11216211A (ja) | 1999-08-10 |
| JP3920439B2 true JP3920439B2 (ja) | 2007-05-30 |
Family
ID=12015343
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP02001798A Expired - Fee Related JP3920439B2 (ja) | 1998-01-30 | 1998-01-30 | ゴルフカート |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3920439B2 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4892863B2 (ja) * | 2005-05-09 | 2012-03-07 | トヨタ自動車株式会社 | 車両制御装置 |
| JP4559324B2 (ja) | 2005-08-31 | 2010-10-06 | 本田技研工業株式会社 | 傾斜角センサの配置構造 |
| JP4873449B2 (ja) * | 2006-02-14 | 2012-02-08 | ヤマハモーターパワープロダクツ株式会社 | 路面傾斜角演算装置を備えた車両 |
| JP5102859B2 (ja) * | 2010-05-07 | 2012-12-19 | 本田技研工業株式会社 | 傾斜角センサの配置構造 |
-
1998
- 1998-01-30 JP JP02001798A patent/JP3920439B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11216211A (ja) | 1999-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3940792B2 (ja) | ゴルフカートの後退時制御装置 | |
| JP4049430B2 (ja) | ゴルフカート | |
| JP3920439B2 (ja) | ゴルフカート | |
| JP3054488B2 (ja) | 乗用型ゴルフカート | |
| JP2008126874A (ja) | 電磁誘導式自動走行車の停止制御方式 | |
| JPH10264792A (ja) | 車両の制動制御装置 | |
| JPH11216212A (ja) | ゴルフカート | |
| JP3583920B2 (ja) | ゴルフカート | |
| JP3108272B2 (ja) | 自走車両 | |
| JP3448502B2 (ja) | ゴルフカートの誘導装置 | |
| JP2003005832A (ja) | 自動走行車 | |
| JP2005041372A (ja) | 自動走行車両 | |
| JP3008042B2 (ja) | 無人搬送車 | |
| JPH10230843A (ja) | ゴルフカート | |
| JPH07277156A (ja) | 自走車両の駐車ブレーキ装置 | |
| JP2001265439A (ja) | 自走車両の速度制御装置 | |
| JP3291540B2 (ja) | 自動走行車の操舵制御装置 | |
| JP2003256044A (ja) | 誘導式車両 | |
| JP3066357B2 (ja) | ゴルフカート | |
| JP3670998B2 (ja) | ゴルフカートの誘導装置 | |
| JP2003250943A (ja) | ゴルフカート | |
| JP2925925B2 (ja) | ゴルフカートの誘導装置 | |
| JP3263407B2 (ja) | カートの速度制御機構 | |
| JP2000334075A (ja) | ゴルフカート | |
| JP2000203304A (ja) | 自動走行車両の車速制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040802 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061114 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070215 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110223 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110223 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120223 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120223 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130223 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130223 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140223 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |