JP2017117345A - 運転支援装置及び運転支援方法 - Google Patents
運転支援装置及び運転支援方法 Download PDFInfo
- Publication number
- JP2017117345A JP2017117345A JP2015254470A JP2015254470A JP2017117345A JP 2017117345 A JP2017117345 A JP 2017117345A JP 2015254470 A JP2015254470 A JP 2015254470A JP 2015254470 A JP2015254470 A JP 2015254470A JP 2017117345 A JP2017117345 A JP 2017117345A
- Authority
- JP
- Japan
- Prior art keywords
- target
- host vehicle
- vehicle
- information
- turning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 25
- 230000008859 change Effects 0.000 claims abstract description 6
- 238000003384 imaging method Methods 0.000 claims description 18
- 238000001514 detection method Methods 0.000 claims description 13
- 230000033228 biological regulation Effects 0.000 description 20
- 230000008569 process Effects 0.000 description 16
- 230000006870 function Effects 0.000 description 15
- 230000009467 reduction Effects 0.000 description 12
- 230000033001 locomotion Effects 0.000 description 8
- 230000004927 fusion Effects 0.000 description 7
- 238000004364 calculation method Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 4
- 230000009471 action Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000002146 bilateral effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
Description
本発明は上記の実施形態に限定されず、例えば以下のように実施されてもよい。
Claims (8)
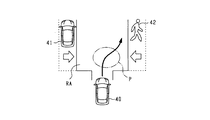
- 自車両(40)の周囲に存在する物標(41,42)を認識する物標認識部と、
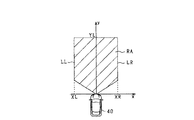
前記自車両の前方に、前記自車両の左方向及び右方向のそれぞれに位置する境界線(LL,LR)で挟まれた領域である前方領域(RA)を設定する領域設定部と、
前記物標認識部により認識された物標が前記前方領域に入った場合に、前記自車両と前記物標との衝突を回避又は衝突被害を軽減するための運転支援を実施する制御部と、
を備え、
前記領域設定部は、前記自車両が旋回している状態にある場合に、前記前方領域の左右の境界線のうち、前記自車両の進路外方向の境界線の横位置を、前記自車両の旋回状態に関する情報である旋回情報に応じて前記自車両に近付ける位置に変更し、前記自車両の進行方向の境界線については前記旋回情報に応じた横位置の変更を実施しないことにより前記前方領域を縮小させる片側制御を実施する、運転支援装置(10)。 - 前記領域設定部は、前記自車両の走行状況に応じて、前記前方領域の左右両側の境界線の横位置を前記旋回情報に応じて前記自車両に近付ける位置に変更することにより前記前方領域を縮小させる両側制御と、前記片側制御とを切り替えて実施する、請求項1に記載の運転支援装置。
- 前記自車両の走行状況として、前記自車両がカーブ路を走行又はふらつき走行しているか否かを判定する状況判定部を備え、
前記領域設定部は、前記状況判定部により前記自車両がカーブ路を走行又はふらつき走行していると判定された場合に前記片側制御を実施する、請求項2に記載の運転支援装置。 - 前記旋回情報に基づき、前記物標認識部により認識された物標と前記自車両との衝突を回避するための運転者による衝突回避操作の開始を判定する操作判定部を備え、
前記領域設定部は、前記操作判定部により前記衝突回避操作が開始されたと判定された場合には、前記前方領域の左右両側の境界線の横位置を前記旋回情報に応じて前記自車両に近付ける位置に変更することにより前記前方領域を縮小させる両側制御を実施する、請求項1〜3のいずれか一項に記載の運転支援装置。 - 前記操作判定部により前記衝突回避操作が開始されたと判定された場合に、前記物標認識部により前記自車両の進行方向に前記物標が認識されており、かつ該認識されている物標が所定の種別に属する物標であるか否かを判定する種別判定部を備え、
前記領域設定部は、前記種別判定部により前記物標が前記所定の種別に属する物標であると判定されていることを条件に、前記操作判定部により前記衝突回避操作が開始されたと判定された場合に前記両側制御により前記前方領域を縮小させる、請求項4に記載の運転支援装置。 - 前記前方領域を縮小させる指標として、前記旋回情報と、前記旋回情報とは異なるその他情報とが定められており、
前記片側制御は、前記前方領域の左右の境界線のうち、前記自車両の進路外方向の境界線の横位置を前記旋回情報と前記その他情報とに応じて変更し、前記自車両の進行方向の境界線の横位置を前記その他情報に応じて変更する、請求項1〜5のいずれか一項に記載の運転支援装置。 - 前記自車両は、前記物標を検知する物標検知装置としてレーダ装置(21)と撮像装置(22)とを搭載しており、
前記制御部は、前記レーダ装置で検知した物標、前記撮像装置で検知した物標、及び前記レーダ装置の検知情報と前記撮像装置の検知情報とを融合して認識した物標のうちの少なくとも1つが前記前方領域に入った場合に前記運転支援を実施する、請求項1〜6のいずれか一項に記載の運転支援装置。 - 自車両(40)の周囲に存在する物標を認識し、
前記自車両の進行方向の前方に、前記自車両の左側及び右側に位置する境界線(LL,LR)で挟まれた領域である前方領域(RA)を設定し、
前記認識された物標が前記前方領域に入った場合に、前記自車両と前記物標との衝突を回避又は衝突被害を軽減するための運転支援を実施し、
前記前方領域の設定に際し、前記自車両が旋回している状態にある場合に、前記前方領域の左右の境界線のうち、前記自車両の進路外方向の境界線の横位置を、前記自車両の旋回状態に関する情報である旋回情報に応じて前記自車両に近付ける位置に変更し、前記自車両の進行方向の境界線については前記旋回情報に応じた横位置の変更を実施しないことにより前記前方領域を縮小させる片側制御を実施する、運転支援方法。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015254470A JP6530705B2 (ja) | 2015-12-25 | 2015-12-25 | 運転支援装置及び運転支援方法 |
| DE112016006004.1T DE112016006004T5 (de) | 2015-12-25 | 2016-12-18 | Fahrunterstützungsvorrichtung und Fahrunterstützungsverfahren |
| US16/064,668 US10854081B2 (en) | 2015-12-25 | 2016-12-18 | Driving assistance device and driving assistance method |
| CN201680075263.6A CN108541325B (zh) | 2015-12-25 | 2016-12-18 | 驾驶辅助装置以及驾驶辅助方法 |
| PCT/JP2016/087696 WO2017110703A1 (ja) | 2015-12-25 | 2016-12-18 | 運転支援装置及び運転支援方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015254470A JP6530705B2 (ja) | 2015-12-25 | 2015-12-25 | 運転支援装置及び運転支援方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017117345A true JP2017117345A (ja) | 2017-06-29 |
| JP6530705B2 JP6530705B2 (ja) | 2019-06-12 |
Family
ID=59090308
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015254470A Active JP6530705B2 (ja) | 2015-12-25 | 2015-12-25 | 運転支援装置及び運転支援方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10854081B2 (ja) |
| JP (1) | JP6530705B2 (ja) |
| CN (1) | CN108541325B (ja) |
| DE (1) | DE112016006004T5 (ja) |
| WO (1) | WO2017110703A1 (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109147389A (zh) * | 2018-08-16 | 2019-01-04 | 大连民族大学 | 自主汽车或者辅助驾驶系统规划路线的方法 |
| JP2019040372A (ja) * | 2017-08-24 | 2019-03-14 | 株式会社Subaru | 車外環境認識装置 |
| KR20190053612A (ko) * | 2017-11-10 | 2019-05-20 | 현대오트론 주식회사 | 차량 추적 장치 및 그것의 동작 방법 |
| WO2019225407A1 (ja) * | 2018-05-21 | 2019-11-28 | 株式会社デンソー | 走行支援装置 |
| US10661790B2 (en) | 2018-02-20 | 2020-05-26 | Hyundai Motor Company | Apparatus and method for controlling driving of vehicle |
| CN111918803A (zh) * | 2018-03-14 | 2020-11-10 | 株式会社电装 | 车辆的驾驶辅助控制装置、车辆的驾驶辅助系统和车辆的驾驶辅助控制方法 |
| CN113291299A (zh) * | 2020-02-21 | 2021-08-24 | 丰田自动车株式会社 | 驾驶辅助系统 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102310378B1 (ko) * | 2017-04-18 | 2021-10-12 | 현대자동차주식회사 | 차량 주행제어 장치 및 방법 |
| DE102017210171A1 (de) * | 2017-06-19 | 2018-12-20 | Robert Bosch Gmbh | Trajektorienbasiertes Führen eines Kraftfahrzeugs |
| JP6661695B2 (ja) * | 2018-05-09 | 2020-03-11 | 三菱電機株式会社 | 移動体検出装置、車両制御システム、移動体検出方法および車両制御方法 |
| KR102505471B1 (ko) * | 2018-10-08 | 2023-03-06 | 주식회사 에이치엘클레무브 | 레이더 장착 각도 검출 장치 및 그 방법 |
| JP7183769B2 (ja) * | 2018-12-20 | 2022-12-06 | 株式会社デンソー | 運転支援装置 |
| CN113874268A (zh) * | 2019-05-22 | 2021-12-31 | 日立安斯泰莫株式会社 | 车辆控制装置 |
| US11897468B2 (en) * | 2020-03-03 | 2024-02-13 | Ford Global Technologies, Llc | Vehicle control system |
| JP2021149319A (ja) * | 2020-03-17 | 2021-09-27 | 本田技研工業株式会社 | 表示制御装置、表示制御方法およびプログラム |
| KR20220000536A (ko) * | 2020-06-26 | 2022-01-04 | 현대자동차주식회사 | 차량 주행 제어 장치 및 방법 |
| CN112277939B (zh) * | 2020-10-30 | 2022-09-06 | 重庆长安汽车股份有限公司 | 一种对于避让前方压线车辆的偏移控制系统及方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05107355A (ja) * | 1991-10-15 | 1993-04-27 | Toyota Motor Corp | 車両用走行制御装置 |
| JPH05205199A (ja) * | 1992-01-29 | 1993-08-13 | Mazda Motor Corp | 車両の障害物検出装置 |
| JP2004136785A (ja) * | 2002-10-17 | 2004-05-13 | Toyota Motor Corp | 車両用制御装置 |
| JP2009271766A (ja) * | 2008-05-08 | 2009-11-19 | Hitachi Ltd | 自動車用障害物検知装置 |
| JP2010015450A (ja) * | 2008-07-04 | 2010-01-21 | Toyota Motor Corp | 衝突防止装置 |
| JP2012196997A (ja) * | 2011-03-18 | 2012-10-18 | Fuji Heavy Ind Ltd | 車両用運転支援装置 |
| JP2012243069A (ja) * | 2011-05-19 | 2012-12-10 | Honda Motor Co Ltd | 運転支援装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4211809B2 (ja) * | 2006-06-30 | 2009-01-21 | トヨタ自動車株式会社 | 物体検出装置 |
| JP4321643B2 (ja) * | 2007-08-10 | 2009-08-26 | トヨタ自動車株式会社 | 周辺監視装置 |
| JP4994256B2 (ja) * | 2008-01-28 | 2012-08-08 | 株式会社ジオ技術研究所 | 経路案内データベースのデータ構造 |
| JP2009220630A (ja) * | 2008-03-13 | 2009-10-01 | Fuji Heavy Ind Ltd | 車両の走行制御装置 |
| EP2302412B1 (en) * | 2009-09-29 | 2012-08-15 | Volvo Car Corporation | System and method for evaluation of an automotive vehicle forward collision threat |
| CN103477378B (zh) * | 2011-04-26 | 2016-10-12 | 丰田自动车株式会社 | 驾驶辅助装置 |
| US9522656B2 (en) | 2012-01-25 | 2016-12-20 | Toyota Jidosha Kabushiki Kaisha | Vehicle controller |
| US20140309839A1 (en) * | 2013-04-15 | 2014-10-16 | Flextronics Ap, Llc | Vehicle Registration to Enter Automated Control of Vehicular Traffic |
| GB2500426B (en) * | 2012-03-22 | 2014-09-10 | Jaguar Land Rover Ltd | Autonomous cruise control |
| JP5909289B2 (ja) * | 2012-12-12 | 2016-04-26 | 本田技研工業株式会社 | 駐車スペース検出装置 |
| JP5842863B2 (ja) * | 2013-05-14 | 2016-01-13 | 株式会社デンソー | 衝突緩和装置 |
| JP5973667B2 (ja) * | 2013-07-17 | 2016-08-23 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| CN105683015B (zh) * | 2013-09-05 | 2018-06-08 | 罗伯特·博世有限公司 | 基于来自后雷达传感器的数据的增强车道偏离警告 |
| JP5929870B2 (ja) * | 2013-10-17 | 2016-06-08 | 株式会社デンソー | 物標検出装置 |
| US9211889B1 (en) * | 2014-07-29 | 2015-12-15 | Robert Bosch Gmbh | Enhanced blind spot detection for vehicle with trailer |
| JP6470039B2 (ja) * | 2014-12-26 | 2019-02-13 | 日立オートモティブシステムズ株式会社 | 車両制御システム |
| KR102338554B1 (ko) * | 2015-03-16 | 2021-12-15 | 주식회사 만도모빌리티솔루션즈 | 자동 긴급 제동장치 및 그 제어방법 |
| KR20160115448A (ko) * | 2015-03-27 | 2016-10-06 | 주식회사 만도 | 차량의 운전 보조 시스템 및 운전 보조 방법 |
| JP6592266B2 (ja) | 2015-03-31 | 2019-10-16 | 株式会社デンソー | 物体検知装置、及び物体検知方法 |
| JP6308186B2 (ja) * | 2015-08-28 | 2018-04-11 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| JP6447468B2 (ja) * | 2015-11-17 | 2019-01-09 | 株式会社デンソー | 運転支援装置 |
-
2015
- 2015-12-25 JP JP2015254470A patent/JP6530705B2/ja active Active
-
2016
- 2016-12-18 DE DE112016006004.1T patent/DE112016006004T5/de active Pending
- 2016-12-18 US US16/064,668 patent/US10854081B2/en active Active
- 2016-12-18 CN CN201680075263.6A patent/CN108541325B/zh active Active
- 2016-12-18 WO PCT/JP2016/087696 patent/WO2017110703A1/ja active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05107355A (ja) * | 1991-10-15 | 1993-04-27 | Toyota Motor Corp | 車両用走行制御装置 |
| JPH05205199A (ja) * | 1992-01-29 | 1993-08-13 | Mazda Motor Corp | 車両の障害物検出装置 |
| JP2004136785A (ja) * | 2002-10-17 | 2004-05-13 | Toyota Motor Corp | 車両用制御装置 |
| JP2009271766A (ja) * | 2008-05-08 | 2009-11-19 | Hitachi Ltd | 自動車用障害物検知装置 |
| JP2010015450A (ja) * | 2008-07-04 | 2010-01-21 | Toyota Motor Corp | 衝突防止装置 |
| JP2012196997A (ja) * | 2011-03-18 | 2012-10-18 | Fuji Heavy Ind Ltd | 車両用運転支援装置 |
| JP2012243069A (ja) * | 2011-05-19 | 2012-12-10 | Honda Motor Co Ltd | 運転支援装置 |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11009589B2 (en) | 2017-08-24 | 2021-05-18 | Subaru Corporation | Vehicle exterior environment recognition apparatus |
| JP2019040372A (ja) * | 2017-08-24 | 2019-03-14 | 株式会社Subaru | 車外環境認識装置 |
| KR102008257B1 (ko) * | 2017-11-10 | 2019-08-07 | 현대오트론 주식회사 | 차량 추적 장치 및 그것의 동작 방법 |
| KR20190053612A (ko) * | 2017-11-10 | 2019-05-20 | 현대오트론 주식회사 | 차량 추적 장치 및 그것의 동작 방법 |
| US10661790B2 (en) | 2018-02-20 | 2020-05-26 | Hyundai Motor Company | Apparatus and method for controlling driving of vehicle |
| CN111918803A (zh) * | 2018-03-14 | 2020-11-10 | 株式会社电装 | 车辆的驾驶辅助控制装置、车辆的驾驶辅助系统和车辆的驾驶辅助控制方法 |
| WO2019225407A1 (ja) * | 2018-05-21 | 2019-11-28 | 株式会社デンソー | 走行支援装置 |
| JP2019202586A (ja) * | 2018-05-21 | 2019-11-28 | 株式会社デンソー | 走行支援装置 |
| CN112154493A (zh) * | 2018-05-21 | 2020-12-29 | 株式会社电装 | 行驶辅助装置 |
| CN112154493B (zh) * | 2018-05-21 | 2022-05-10 | 株式会社电装 | 行驶辅助装置 |
| CN109147389A (zh) * | 2018-08-16 | 2019-01-04 | 大连民族大学 | 自主汽车或者辅助驾驶系统规划路线的方法 |
| CN113291299A (zh) * | 2020-02-21 | 2021-08-24 | 丰田自动车株式会社 | 驾驶辅助系统 |
| JP2021135510A (ja) * | 2020-02-21 | 2021-09-13 | トヨタ自動車株式会社 | 運転支援システム |
| JP7259780B2 (ja) | 2020-02-21 | 2023-04-18 | トヨタ自動車株式会社 | 運転支援システム |
| CN113291299B (zh) * | 2020-02-21 | 2024-01-02 | 丰田自动车株式会社 | 驾驶辅助系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017110703A1 (ja) | 2017-06-29 |
| DE112016006004T5 (de) | 2018-09-06 |
| US20190012920A1 (en) | 2019-01-10 |
| CN108541325B (zh) | 2021-03-19 |
| US10854081B2 (en) | 2020-12-01 |
| CN108541325A (zh) | 2018-09-14 |
| JP6530705B2 (ja) | 2019-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6530705B2 (ja) | 運転支援装置及び運転支援方法 | |
| JP6507839B2 (ja) | 車両の走行制御装置 | |
| WO2016159288A1 (ja) | 物標存在判定方法及び装置 | |
| JP6561584B2 (ja) | 車両制御装置、及び車両制御方法 | |
| JP6729282B2 (ja) | 車両制御装置 | |
| JP6412457B2 (ja) | 運転支援装置、及び運転支援方法 | |
| JP6443292B2 (ja) | 運転支援装置、及び運転支援方法 | |
| WO2017111135A1 (ja) | 走行支援装置及び走行支援方法 | |
| JP6622584B2 (ja) | 運転支援装置及び運転支援方法 | |
| JP2012183867A (ja) | 車両の運転支援装置 | |
| JP6491596B2 (ja) | 車両制御装置及び車両制御方法 | |
| JP2014213776A (ja) | 衝突判定装置、および衝突緩和装置 | |
| JP2017114430A (ja) | 車両制御装置及び車両制御方法 | |
| JP2016192166A (ja) | 車両制御装置、及び車両制御方法 | |
| JP2004265238A (ja) | 車両用運転支援装置 | |
| JPWO2014122755A1 (ja) | 運転支援装置 | |
| JP2017117342A (ja) | 走行支援装置 | |
| JP4865095B1 (ja) | 車両の運転支援装置 | |
| JP2019046143A (ja) | 走行支援装置 | |
| JP2017142600A (ja) | 衝突予測装置 | |
| JP6520783B2 (ja) | 車両検知装置 | |
| JP2017052412A (ja) | 運転支援装置、及び運転支援方法 | |
| JP4294450B2 (ja) | 車両用運転支援装置 | |
| JP6733616B2 (ja) | 車両制御装置 | |
| JP2005081999A (ja) | 車両用運転支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181002 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190423 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190517 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6530705 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |