JP2008166370A - 基板搬送装置、基板載置棚および基板処理装置 - Google Patents
基板搬送装置、基板載置棚および基板処理装置 Download PDFInfo
- Publication number
- JP2008166370A JP2008166370A JP2006352000A JP2006352000A JP2008166370A JP 2008166370 A JP2008166370 A JP 2008166370A JP 2006352000 A JP2006352000 A JP 2006352000A JP 2006352000 A JP2006352000 A JP 2006352000A JP 2008166370 A JP2008166370 A JP 2008166370A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- height
- difference
- storage
- holders
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/34—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H10P72/3402—Mechanical parts of transfer devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0095—Manipulators transporting wafers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/02—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
- B25J9/043—Cylindrical coordinate type comprising an articulated arm double selective compliance articulated robot arms [SCARA]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/106—Program-controlled manipulators characterised by positioning means for manipulator elements with articulated links
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/34—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H10P72/3411—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
- H10P72/3412—Batch transfer of wafers
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/70—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping
- H10P72/76—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches
- H10P72/7602—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for supporting or gripping using mechanical means, e.g. clamps or pinches the wafers being placed on a robot blade or gripped by a gripper for conveyance
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/137—Associated with semiconductor wafer handling including means for charging or discharging wafer cassette
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Cleaning Or Drying Semiconductors (AREA)
Abstract
【解決手段】インデクサブロックおよび処理ブロックからなる基板処理装置において、インデクサブロックと処理ブロックとの間で、基板WがインデクサロボットIRにより搬送される。インデクサロボットIRは回転ステージ250上で互いに上下に設けられた2つのハンドIRH1,IRH2を備える。一方のハンドIRH1に対して他方のハンドIRH2が鉛直方向に移動する。ハンドIRH1とハンドIRH2との高さの差は、インデクサブロックに搬入される基板Wが収納されたキャリアの基板収納溝間の間隔と等しくなるように調整できる。また、ハンドIRH1とハンドIRH2との高さの差は、インデクサブロックおよび処理ブロック間に設けられる基板載置部の支持板間の間隔と等しくなるように調整できる。
【選択図】図4
Description
(1)基板処理装置の構成
図1(a)は本発明の第1の実施の形態に係る基板処理装置の平面図であり、図1(b)は図1(a)の基板処理装置を矢印Xの方向から見た模式的側面図である。また、図2は、図1(a)のA−A線断面を模式的に示す図である。
次に、図1および図2を参照して基板処理装置100の動作の概要について説明する。なお、以下に説明する基板処理装置100の各構成要素の動作は、図1の制御部4により制御される。
図3は図1のキャリアCおよび基板載置部PASS1,PASS2の構造を説明するための縦断面図である。
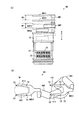
続いて、インデクサロボットIRの詳細な構成について説明する。図4はインデクサロボットIRの側面図であり、図5はインデクサロボットIRの平面図である。
次に、メインロボットMRの詳細な構成について説明する。図6(a)は、メインロボットMRの側面図であり、図6(b)はメインロボットMRの平面図である。
次に、図1に示した表面洗浄ユニットSSについて説明する。図7は表面洗浄ユニットSSの構成を説明するための図である。図7に示す表面洗浄ユニットSSでは、ブラシを用いた基板Wの洗浄処理(以下、スクラブ洗浄処理と呼ぶ)が行われる。
図4を用いて説明したように、インデクサロボットIRにおけるハンドIRH1とハンドIRH2との高さの差は所定の範囲内で変化させることが可能である。
本実施の形態では、表面洗浄ユニットSSにおいて、ブラシを用いて基板Wの表面を洗浄するが、これに限らず、薬液を用いて基板Wの表面を洗浄してもよい。
第2の実施の形態に係る基板処理装置は、以下の点で第1の実施の形態に係る基板処理装置100と構成が異なる。
本実施の形態に係る基板処理装置に用いられる基板載置部は、以下の構成を有する。図8は、第2の実施の形態に係る基板処理装置に用いられる基板載置部の構造を説明するための図である。
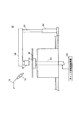
図10は、第2の実施の形態に係る基板処理装置に用いられるインデクサロボットIRの側面図である。図10に示すように、本実施の形態のインデクサロボットIRには、図4のモータ251、昇降軸260およびボールねじ261が設けられていない。
本実施の形態において、インデクサロボットIRにおけるハンドIRH1とハンドIRH2との高さの差N1(図10)はキャリアC内で上下に隣接する基板収納溝C2間の間隔GAと等しくなるように設定されている。
以下、請求項の各構成要素と実施の形態の各要素との対応の例について説明するが、本発明は下記の例に限定されない。
11 処理ブロック
40 キャリア載置台
51,51P 支持板
100 基板処理装置
210 搬送レール部
211 水平移動機構
220 移動支持柱
221 鉛直移動機構
230 昇降支持部
240 ベース部
241 回転機構
250 回転ステージ
251 モータ
260 昇降軸
261 ボールねじ
500 シリンダ同期機構
510 シリンダ
C キャリア
C2 基板収納溝
IR インデクサロボット
IAM1,IAM2 多関節型アーム
IRH1,IRH2,MRH1,MRH2 ハンド
MR メインロボット
PASS1,PASS2 基板載置部
PN 支持ピン
SS 表面洗浄ユニット
W 基板
Claims (8)
- 基板が略水平姿勢で収納される複数段の収納溝を有する収納容器と、基板が略水平姿勢で載置される複数段の収納棚を有する基板載置棚との間で基板を搬送する基板搬送装置であって、
互いに上下に設けられ、基板を略水平姿勢で保持する第1および第2の基板保持部と、
前記収納容器および前記基板載置棚に対して基板の受け渡しを行うために前記第1および第2の基板保持部を移動させるとともに略水平方向に進退させる駆動機構と、
前記第1および前記第2の基板保持部間の高さの差を調整する調整機構とを備え、
前記調整機構は、前記収納容器と前記第1および第2の基板保持部との間での基板の受け渡しの際に、前記第1および第2の基板保持部間の高さの差を前記収納容器の前記収納溝間の高さの差に調整し、前記基板載置棚と前記第1および第2の基板保持部との間での基板の受け渡しの際に、前記第1および第2の基板保持部間の高さの差を前記基板載置棚の収納棚間の高さの差に調整することを特徴とする基板搬送装置。 - 前記駆動機構は、前記収納容器および前記基板載置棚に対して基板の受け渡しを行うために前記第1および第2の基板保持部を略水平方向に個別に進退させることを特徴とする請求項1記載の基板搬送装置。
- 互いに上下に設けられた第1および第2の基板保持部を有する第1の基板搬送装置と互いに上下に設けられた第3および第4の基板保持部を有する第2の基板搬送装置との間で基板を受け渡すための基板載置棚であって、
基板を略水平姿勢でそれぞれ支持する複数段の収納棚と、
収納棚間の高さの差を調整する調整機構とを備え、
前記調整機構は、前記第1の基板搬送装置との間での基板の受け渡しの際に、前記収納棚間の高さの差を前記第1および第2の基板保持部間の高さの差に調整し、前記第2の基板搬送装置との間での基板の受け渡しの際に、前記収納棚間の高さの差を前記第3および第4の基板保持部間の高さの差に調整することを特徴とする基板載置棚。 - 各段の収納棚は、略水平面内で所定の間隔をおいて配置される一組の棚部と、前記一組の棚部に設けられ、基板の下面を支持する複数の支持部材とを含むことを特徴とする請求項3記載の基板載置棚。
- 基板に処理を行う基板処理装置であって、
基板を処理する処理領域と、
前記処理領域に対して基板を搬入および搬出する搬入搬出領域と、
前記処理領域と前記搬入搬出領域との間で基板を受け渡す受け渡し部とを備え、
前記搬入搬出領域は、
基板が略水平姿勢で収納される複数段の収納溝を有する収納容器が載置される容器載置部と、
前記容器載置部に載置された収納容器と前記受け渡し部との間で基板を搬送する第1の基板搬送装置とを含み、
前記処理領域は、
基板に処理を行う処理部と、
前記受け渡し部と前記処理部との間で基板を搬送する第2の基板搬送装置とを含み、
前記受け渡し部は、
基板が略水平姿勢で載置される複数段の収納棚を有する基板載置棚を含み、
前記第1の基板搬送装置は、
互いに上下に設けられ、基板を略水平姿勢で保持する第1および第2の基板保持部と、
前記収納容器および前記基板載置棚に対して基板の受け渡しを行うために前記第1および第2の基板保持部を移動させるとともに略水平方向に進退させる駆動機構と、
前記第1および前記第2の基板保持部間の高さの差を調整する調整機構とを備え、
前記調整機構は、前記収納容器と前記第1および第2の基板保持部との間での基板の受け渡しの際に、前記第1および第2の基板保持部間の高さの差を前記収納容器の前記収納溝間の高さの差に調整し、前記基板載置棚と前記第1および第2の基板保持部との間での基板の受け渡しの際に、前記第1および第2の基板保持部間の高さの差を前記基板載置棚の収納棚間の高さの差に調整することを特徴とする基板処理装置。 - 前記処理部は、基板を洗浄する洗浄処理部を含むことを特徴とする請求項5記載の基板処理装置。
- 基板に処理を行う基板処理装置であって、
基板を処理処理領域と、
前記処理領域に対して基板を搬入および搬出する搬入搬出領域と、
前記処理領域と前記搬入搬出領域との間で基板を受け渡す受け渡し部とを備え、
前記搬入搬出領域は、
基板が略水平姿勢で収納される複数段の収納溝を有する収納容器が載置される容器載置部と、
互いに上下に設けられた第1および第2の基板保持部を有し、前記容器載置部に載置された収納容器と前記受け渡し部との間で基板を搬送する第1の基板搬送装置とを含み、
前記処理領域は、
基板に処理を行う処理部と、
互いに上下に設けられた第3および第4の基板保持部を有し、前記受け渡し部と前記処理部との間で基板を搬送する第2の基板搬送装置とを含み、
前記受け渡し部は、
基板が略水平姿勢で載置される複数段の収納棚を有する基板載置棚を含み、
前記基板載置棚は、
基板を略水平姿勢でそれぞれ支持する複数段の収納棚と、
収納棚間の高さの差を調整する調整機構とを備え、
前記調整機構は、前記第1の基板搬送装置との間での基板の受け渡しの際に、前記収納棚間の高さの差を前記第1および第2の基板保持部間の高さの差に調整し、前記第2の基板搬送装置との間での基板の受け渡しの際に、前記収納棚間の高さの差を前記第3および第4の基板保持部間の高さの差に調整することを特徴とする基板処理装置。 - 前記処理部は、基板を洗浄する洗浄処理部を含むことを特徴とする請求項7記載の基板処理装置。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006352000A JP4744427B2 (ja) | 2006-12-27 | 2006-12-27 | 基板処理装置 |
| US11/958,816 US20080159832A1 (en) | 2006-12-27 | 2007-12-18 | Substrate transporting apparatus, substrate platform shelf and substrate processing apparatus |
| KR1020070135430A KR100927302B1 (ko) | 2006-12-27 | 2007-12-21 | 기판처리장치 |
| CN201010198915XA CN101872736B (zh) | 2006-12-27 | 2007-12-27 | 基板处理装置 |
| TW096150475A TWI455234B (zh) | 2006-12-27 | 2007-12-27 | 基板處理裝置 |
| CN2007103056009A CN101221918B (zh) | 2006-12-27 | 2007-12-27 | 基板搬运装置、基板承载架和基板处理装置 |
| US12/886,063 US8500915B2 (en) | 2006-12-27 | 2010-09-20 | Substrate transporting apparatus, substrate platform shelf and substrate processing apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006352000A JP4744427B2 (ja) | 2006-12-27 | 2006-12-27 | 基板処理装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008166370A true JP2008166370A (ja) | 2008-07-17 |
| JP4744427B2 JP4744427B2 (ja) | 2011-08-10 |
Family
ID=39584217
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006352000A Expired - Fee Related JP4744427B2 (ja) | 2006-12-27 | 2006-12-27 | 基板処理装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US20080159832A1 (ja) |
| JP (1) | JP4744427B2 (ja) |
| KR (1) | KR100927302B1 (ja) |
| CN (2) | CN101221918B (ja) |
| TW (1) | TWI455234B (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010045214A (ja) * | 2008-08-13 | 2010-02-25 | Dainippon Screen Mfg Co Ltd | 基板搬送装置およびこれを備えた基板処理装置 |
| JP2010129769A (ja) * | 2008-11-27 | 2010-06-10 | Tokyo Electron Ltd | 基板処理システム |
| JP2010192685A (ja) * | 2009-02-18 | 2010-09-02 | Tokyo Electron Ltd | 基板搬送装置及び基板処理システム |
| CN101859723A (zh) * | 2009-04-01 | 2010-10-13 | 东京毅力科创株式会社 | 基板交换方法以及基板处理装置 |
| JP2010238783A (ja) * | 2009-03-30 | 2010-10-21 | Dainippon Screen Mfg Co Ltd | 基板処理装置および基板搬送方法 |
| JP2012501533A (ja) * | 2008-08-28 | 2012-01-19 | セメス カンパニー リミテッド | 移送部材の速度調節方法、これを利用した基板移送方法及び基板処理装置 |
| JP2012501534A (ja) * | 2008-08-28 | 2012-01-19 | セメス カンパニー リミテッド | 基板処理装置及び基板搬送方法 |
| JP2012160759A (ja) * | 2012-05-15 | 2012-08-23 | Dainippon Screen Mfg Co Ltd | 基板搬送装置およびこれを備えた基板処理装置 |
| JP2013098288A (ja) * | 2011-10-31 | 2013-05-20 | Disco Abrasive Syst Ltd | 搬送装置 |
| KR101495241B1 (ko) | 2010-12-24 | 2015-02-24 | 카와사키 주코교 카부시키 카이샤 | 반송 로봇, 그의 기판 반송 방법 및 기판 반송 중계 장치 |
| JP2017085127A (ja) * | 2011-03-11 | 2017-05-18 | ブルックス オートメーション インコーポレイテッド | 基板処理ツール |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8430620B1 (en) | 2008-03-24 | 2013-04-30 | Novellus Systems, Inc. | Dedicated hot and cold end effectors for improved throughput |
| DE102009009548A1 (de) * | 2009-02-19 | 2010-09-09 | Jonas & Redmann Automationstechnik Gmbh | Verfahren zum Bilden einer paketartigen Back-To-Back-Wafercharge |
| JP5037551B2 (ja) * | 2009-03-24 | 2012-09-26 | 東京エレクトロン株式会社 | 基板交換機構及び基板交換方法 |
| JP5347652B2 (ja) * | 2009-03-30 | 2013-11-20 | 株式会社Ihi | 基板昇降移送装置及び基板処理移送システム |
| TWI451519B (zh) * | 2010-10-19 | 2014-09-01 | Au Optronics Corp | 基板運輸處理方法 |
| CN102064126B (zh) * | 2010-11-04 | 2013-04-17 | 友达光电股份有限公司 | 基板运输处理方法 |
| JP5666361B2 (ja) * | 2011-03-29 | 2015-02-12 | 株式会社Screenセミコンダクターソリューションズ | 基板処理装置 |
| KR20140087038A (ko) * | 2011-12-15 | 2014-07-08 | 다즈모 가부시키가이샤 | 웨이퍼 반송장치 |
| JP5993625B2 (ja) * | 2012-06-15 | 2016-09-14 | 株式会社Screenホールディングス | 基板反転装置、および、基板処理装置 |
| US9245783B2 (en) | 2013-05-24 | 2016-01-26 | Novellus Systems, Inc. | Vacuum robot with linear translation carriage |
| JP6190645B2 (ja) * | 2013-07-09 | 2017-08-30 | 東京エレクトロン株式会社 | 基板搬送方法 |
| US9214369B2 (en) * | 2013-11-01 | 2015-12-15 | Varian Semiconductor Equipment Associates, Inc. | Dynamic pitch substrate lift |
| JP6347333B2 (ja) * | 2015-06-01 | 2018-06-27 | 株式会社ダイフク | 平面保管設備における入出庫装置の制御方法 |
| CN107552467A (zh) * | 2017-09-24 | 2018-01-09 | 安徽海拓志永智能装备股份有限公司 | 适用于玻璃清洗的上线系统 |
| TWI668790B (zh) * | 2018-04-30 | 2019-08-11 | 漢民科技股份有限公司 | 用於半導體製程之基板傳送機構及成膜裝置 |
| JP7114456B2 (ja) * | 2018-12-28 | 2022-08-08 | 株式会社Screenホールディングス | 基板処理装置および基板搬送方法 |
| US11427412B2 (en) * | 2019-05-09 | 2022-08-30 | Kawasaki Jukogyo Kabushiki Kaisha | Substrate conveying robot and substrate conveying method |
| US11004713B2 (en) | 2019-05-16 | 2021-05-11 | Taiwan Semiconductor Manufacturing Co., Ltd. | Robot arm device and method for transferring wafer |
| CN110817225A (zh) * | 2019-11-28 | 2020-02-21 | 国网新疆电力有限公司物资公司 | 电子物资仓库用的自动码垛机器人 |
| KR102150230B1 (ko) * | 2020-04-07 | 2020-08-31 | (주)볼타오토메이션 | 진공로봇을 이용한 이송장치 |
| JP7541457B2 (ja) * | 2020-09-18 | 2024-08-28 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| KR20220106900A (ko) | 2021-01-22 | 2022-08-01 | 삼성디스플레이 주식회사 | 기판 적재용 카세트 및 이를 이용한 기판 처리 방법 |
| US12441557B2 (en) * | 2021-12-30 | 2025-10-14 | Semes Co., Ltd. | Apparatus and method for transporting articles |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0870033A (ja) * | 1994-08-26 | 1996-03-12 | Kokusai Electric Co Ltd | 半導体製造装置のウェーハ移載機 |
| JPH11130254A (ja) * | 1997-10-24 | 1999-05-18 | Sharp Corp | 基板搬送カセット |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100310249B1 (ko) * | 1995-08-05 | 2001-12-17 | 엔도 마코토 | 기판처리장치 |
| TW318258B (ja) * | 1995-12-12 | 1997-10-21 | Tokyo Electron Co Ltd | |
| JP3522469B2 (ja) * | 1996-11-18 | 2004-04-26 | 大日本スクリーン製造株式会社 | 基板処理装置および基板処理方法 |
| JP3589839B2 (ja) * | 1997-10-24 | 2004-11-17 | シャープ株式会社 | ピッチ変換を伴う基板搬送装置 |
| JP3974985B2 (ja) | 1997-12-02 | 2007-09-12 | 大日本スクリーン製造株式会社 | 基板搬送装置 |
| JP3888608B2 (ja) * | 2001-04-25 | 2007-03-07 | 東京エレクトロン株式会社 | 基板両面処理装置 |
| JP4283559B2 (ja) * | 2003-02-24 | 2009-06-24 | 東京エレクトロン株式会社 | 搬送装置及び真空処理装置並びに常圧搬送装置 |
| JP2005072559A (ja) * | 2003-08-05 | 2005-03-17 | Dainippon Screen Mfg Co Ltd | 基板処理装置および基板処理方法 |
| JP5154008B2 (ja) * | 2004-11-10 | 2013-02-27 | 株式会社Sokudo | 基板処理装置および基板処理方法 |
| KR20060077960A (ko) * | 2004-12-30 | 2006-07-05 | 삼성전자주식회사 | 레티클 수납 카세트 |
-
2006
- 2006-12-27 JP JP2006352000A patent/JP4744427B2/ja not_active Expired - Fee Related
-
2007
- 2007-12-18 US US11/958,816 patent/US20080159832A1/en not_active Abandoned
- 2007-12-21 KR KR1020070135430A patent/KR100927302B1/ko not_active Expired - Fee Related
- 2007-12-27 TW TW096150475A patent/TWI455234B/zh not_active IP Right Cessation
- 2007-12-27 CN CN2007103056009A patent/CN101221918B/zh not_active Expired - Fee Related
- 2007-12-27 CN CN201010198915XA patent/CN101872736B/zh not_active Expired - Fee Related
-
2010
- 2010-09-20 US US12/886,063 patent/US8500915B2/en not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0870033A (ja) * | 1994-08-26 | 1996-03-12 | Kokusai Electric Co Ltd | 半導体製造装置のウェーハ移載機 |
| JPH11130254A (ja) * | 1997-10-24 | 1999-05-18 | Sharp Corp | 基板搬送カセット |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010045214A (ja) * | 2008-08-13 | 2010-02-25 | Dainippon Screen Mfg Co Ltd | 基板搬送装置およびこれを備えた基板処理装置 |
| US8690516B2 (en) | 2008-08-28 | 2014-04-08 | Semes Co., Ltd. | Method of adjusting velocity of transfer member, method of transferring substrate using the method, and substrate-processing apparatus |
| US8615323B2 (en) | 2008-08-28 | 2013-12-24 | Semes Co., Ltd. | Substrate-processing apparatus and method of transferring substrate in the same |
| JP2012501533A (ja) * | 2008-08-28 | 2012-01-19 | セメス カンパニー リミテッド | 移送部材の速度調節方法、これを利用した基板移送方法及び基板処理装置 |
| JP2012501534A (ja) * | 2008-08-28 | 2012-01-19 | セメス カンパニー リミテッド | 基板処理装置及び基板搬送方法 |
| KR101229010B1 (ko) | 2008-11-27 | 2013-02-01 | 도쿄엘렉트론가부시키가이샤 | 기판 처리 시스템 |
| JP2010129769A (ja) * | 2008-11-27 | 2010-06-10 | Tokyo Electron Ltd | 基板処理システム |
| JP2010192685A (ja) * | 2009-02-18 | 2010-09-02 | Tokyo Electron Ltd | 基板搬送装置及び基板処理システム |
| JP2010238783A (ja) * | 2009-03-30 | 2010-10-21 | Dainippon Screen Mfg Co Ltd | 基板処理装置および基板搬送方法 |
| JP2010245127A (ja) * | 2009-04-01 | 2010-10-28 | Tokyo Electron Ltd | 基板交換方法及び基板処理装置 |
| CN101859723A (zh) * | 2009-04-01 | 2010-10-13 | 东京毅力科创株式会社 | 基板交换方法以及基板处理装置 |
| KR101495241B1 (ko) | 2010-12-24 | 2015-02-24 | 카와사키 주코교 카부시키 카이샤 | 반송 로봇, 그의 기판 반송 방법 및 기판 반송 중계 장치 |
| JP2017085127A (ja) * | 2011-03-11 | 2017-05-18 | ブルックス オートメーション インコーポレイテッド | 基板処理ツール |
| US10325795B2 (en) | 2011-03-11 | 2019-06-18 | Brooks Automation, Inc. | Substrate processing apparatus |
| US10600665B2 (en) | 2011-03-11 | 2020-03-24 | Brooks Automation, Inc. | Substrate processing apparatus |
| US11978649B2 (en) | 2011-03-11 | 2024-05-07 | Brooks Automation Us, Llc | Substrate processing apparatus |
| JP2013098288A (ja) * | 2011-10-31 | 2013-05-20 | Disco Abrasive Syst Ltd | 搬送装置 |
| JP2012160759A (ja) * | 2012-05-15 | 2012-08-23 | Dainippon Screen Mfg Co Ltd | 基板搬送装置およびこれを備えた基板処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW200836289A (en) | 2008-09-01 |
| CN101872736A (zh) | 2010-10-27 |
| TWI455234B (zh) | 2014-10-01 |
| KR100927302B1 (ko) | 2009-11-18 |
| CN101221918A (zh) | 2008-07-16 |
| US8500915B2 (en) | 2013-08-06 |
| KR20080061290A (ko) | 2008-07-02 |
| CN101872736B (zh) | 2012-10-24 |
| US20080159832A1 (en) | 2008-07-03 |
| US20110008148A1 (en) | 2011-01-13 |
| JP4744427B2 (ja) | 2011-08-10 |
| CN101221918B (zh) | 2010-07-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4744427B2 (ja) | 基板処理装置 | |
| JP5068738B2 (ja) | 基板処理装置およびその方法 | |
| JP4744426B2 (ja) | 基板処理装置および基板処理方法 | |
| CN101246813B (zh) | 基板处理装置 | |
| CN101211812B (zh) | 基板处理装置 | |
| JP4999487B2 (ja) | 基板処理装置 | |
| JP5274339B2 (ja) | 基板処理装置および基板搬送方法 | |
| KR102157427B1 (ko) | 기판 반송 로봇 및 기판 처리 시스템 | |
| CN101211758B (zh) | 基板处理装置 | |
| JP4969138B2 (ja) | 基板処理装置 | |
| US11069546B2 (en) | Substrate processing system | |
| JP4869097B2 (ja) | 基板処理装置 | |
| JP5385965B2 (ja) | 基板処理装置 | |
| JP2005145713A (ja) | 基板の搬送装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100914 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100916 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110510 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110510 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140520 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4744427 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |