JP2005341881A - 乗用型田植機 - Google Patents
乗用型田植機 Download PDFInfo
- Publication number
- JP2005341881A JP2005341881A JP2004166055A JP2004166055A JP2005341881A JP 2005341881 A JP2005341881 A JP 2005341881A JP 2004166055 A JP2004166055 A JP 2004166055A JP 2004166055 A JP2004166055 A JP 2004166055A JP 2005341881 A JP2005341881 A JP 2005341881A
- Authority
- JP
- Japan
- Prior art keywords
- scraping device
- seedling planting
- scraping
- rotating body
- rice transplanter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Abstract
【解決手段】 代掻き装置53を苗植付装置5と後輪2との間に備え、苗植付装置5の動力を代掻き装置53に伝達する伝動機構80を備える。苗植付装置5が作動していると苗植付装置5の動力が伝動機構80を介して代掻き装置53に伝達されて代掻き装置53の回転体62,63,64が回転駆動される回転駆動状態、及び苗植付装置5が停止していると代掻き装置53の回転体62,63,64が自由回転する自由回転状態を設定可能な設定機構77を備える。
【選択図】 図4
Description
本発明は乗用型田植機において、代掻き装置を備えた乗用型田植機と、代掻き装置を備えない乗用型田植機とを、適切に生産することができるように構成することを目的としている。
(構成)
本発明の第1特徴は、乗用型田植機において次のように構成することにある。
前輪及び後輪で支持された機体の後部にリンク機構を備え、リンク機構に苗植付装置を支持する。田面に接地した状態で左右方向の横軸芯周りに回転することにより田面の代掻きを行う回転体を備えて構成された代掻き装置を、苗植付装置と後輪との間に備え、苗植付装置の動力を代掻き装置に伝達する伝動機構を備える。苗植付装置が作動していると苗植付装置の動力が伝動機構を介して代掻き装置に伝達されて代掻き装置の回転体が回転駆動される回転駆動状態、及び苗植付装置が停止していると代掻き装置の回転体が自由回転する自由回転状態を設定可能な設定機構を備える。
本発明の第1特徴によると、乗用型田植機において苗植付装置と後輪との間に代掻き装置を備えた場合、苗植付装置の動力が伝動機構を介して代掻き装置に伝達されるように構成している。この場合、本発明の第1特徴によると、苗植付装置(例えば後部に植付機構を備えた伝動ケースや、機体からの伝動軸が接続されるフィードケース)に、伝動機構の接続部分を備えることになるのであるが、苗植付装置の伝動ケースやフィードケースはミッションケースや後輪支持ケースに比べて比較的小さいので、特許文献1のようにミッションケースや後輪支持ケースに代掻き装置への伝動軸の出力部を備える場合に比べて、本発明の第1特徴のように、苗植付装置の伝動ケースやフィードケースに伝動機構の接続部分を備える方が構造の簡素なものとなる。
これにより、前述のように苗植付装置を田面に下降駆動して、苗植付装置のフロートを田面に接地させた状態で走行する場合、本発明の第1特徴によると、設定手段により自由回転状態を設定すれば、機体の進行に伴って田面からの抵抗により、代掻き装置の回転体が回転するのであり、代掻き装置の回転体によって田面が荒らされることがない。
本発明の第1特徴によると、乗用型田植機において代掻き装置への伝動軸の出力部をミッションケースや後輪支持ケースに備えなくても、代掻き装置を備えた乗用型田植機と代掻き装置を備えない乗用型田植機とを適切に生産することができるようになって、代掻き装置を備えた乗用型田植機と代掻き装置を備えない乗用型田植機とを生産する際の生産コストを抑えることができた。
(構成)
本発明の第2特徴は、本発明の第1特徴の乗用型田植機において次のように構成することにある。
田面に接地した状態で田面を前側から後側に掻くように代掻き装置の回転体が苗植付装置の動力により回転駆動され、且つ、苗植付装置が停止していると田面に接地した状態で田面を前側から後側に掻くように代掻き装置の回転体の自由回転を許容する一方向クラッチを備えて、設定機構を構成する。
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
前項[I]に記載の回転駆動状態及び自由回転状態を得る場合、伝動機構に爪式クラッチを備えて、爪式クラッチのシフト部材をスライド操作することにより、回転駆動状態及び自由回転状態を得るように構成することが考えられるが、爪式クラッチのシフト部材をスライド操作する操作系が必要になる。
本発明の第2特徴によると、本発明の第1特徴と同様に前項[I]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第2特徴によると、代掻き装置の回転体への動力を伝動及び遮断状態に操作する爪式クラッチを備える必要がなく、爪式クラッチのシフト部材をスライド操作する操作系を備える必要がなくなって、構造の簡素化の面で有利なものとなった。
本発明の第2特徴によると、一方向クラッチにより代掻き装置の回転体が苗植付装置よりも先行回転する状態が無理なく許容されるようになって、代掻き装置の回転体が苗植付装置よりも先行回転できないことによる代掻き装置の破損を防止することができた。
(構成)
本発明の第3特徴は、本発明の第1又は第2特徴の乗用型田植機において次のように構成することにある。
苗植付装置に代掻き装置を支持し、苗植付装置に対する代掻き装置の高さを変更自在な高さ調節機構を備える。
本発明の第3特徴によると、本発明の第1又は第2特徴と同様に前項[I][II]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
本発明の第3特徴のように、苗植付装置に代掻き装置に支持することにより、苗植付装置に代掻き装置に支持された状態で前項[I]に記載のように、苗植付装置の伝動ケースやフィードケースと代掻き装置とに亘って伝動機構が接続されることになるので、代掻き装置及び伝動機構を一つのユニットとして取り扱うことが容易になる。
この場合、本発明の第3特徴のように、苗植付装置に対する代掻き装置の高さを変更自在な高さ調節機構を備えることにより、前述の設定高さを変更することによって苗の植付深さ(設定深さ)を変更しても、高さ調節機構を操作することによって、代掻き装置の田面への接地状態を一定に維持したり、代掻き装置の田面への接地状態を任意に変更したりすることができる。
本発明の第3特徴によると、本発明の第1又は第2特徴と同様に前項[I][II]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第3特徴によると、代掻き装置及び伝動機構を一つのユニットとして取り扱うことが容易になって、代掻き装置を備えた乗用型田植機と代掻き装置を備えない乗用型田植機とを生産する際の生産コストを抑えることができた。
(構成)
本発明の第4特徴は、本発明の第1〜第3特徴の乗用型田植機のうちのいずれか一つにおいて次のように構成することにある。
複数の回転体を備えて代掻き装置を構成し、田面の泥を後方に逃がすリング状の隙間部を代掻き装置の回転体の間に備える。
本発明の第4特徴によると、本発明の第1〜第3特徴のうちのいずれか一つと同様に前項[I]〜[III]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
苗植付装置の前方の田面を代掻き(整地)する為に、代掻き装置は一般に苗植付装置の横幅に亘るような横幅の大きなものになることが多いので、機体の進行に伴って代掻き装置の回転体が田面の泥を前方に押してしまうことが考えられる。
本発明の第4特徴によると、本発明の第1〜第3特徴のうちのいずれか一つと同様に前項[I]〜[III]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第4特徴によると、機体の進行に伴って代掻き装置の回転体が田面の泥を前方に押してしまう状態を少なくすることができて、代掻き装置の代掻き(整地)性能を向上させることができた。
(構成)
本発明の第5特徴は、本発明の第4特徴の乗用型田植機において次のように構成することにある。
後輪の後方に代掻き装置の隙間部を位置させる。
本発明の第5特徴によると、本発明の第4特徴と同様に前項[I]〜[IV]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
乗用型田植機が水田を走行する際、後輪が田面に入り込むと、後輪により田面に溝が掘られようとするのに加えて、溝の両側に小さな泥の山が土手のように盛り上げられるような状態になることがある。
本発明の第5特徴によると、本発明の第4特徴と同様に前項[I]〜[IV]に記載の「発明の効果」を備えておりこれに加えて以下のような「発明の効果」を備えている。
本発明の第5特徴によると、後輪により田面に溝が掘られようとするのに加えて、溝の両側に小さな泥の山が土手のように盛り上げられるような状態になっても、田面の溝の両側の盛り上がり部分が崩されて、崩された泥が田面の溝に送り込まれ、田面の溝が適切に埋められるようにすることができて、代掻き装置の代掻き(整地)性能を向上させることができた。
(構成)
本発明の第6特徴は、本発明の第4又は第5特徴の乗用型田植機において次のように構成することにある。
苗植付装置に備えられたフロートの前方に代掻き装置の隙間部を位置させ、苗植付装置の植付機構による植付位置の前方に代掻き装置の回転体を位置させる。
本発明の第6特徴によると、本発明の第4又は第5特徴と同様に前項[I]〜[V]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
本発明の第6特徴によると、苗植付装置のフロートの前方に代掻き装置の隙間部が位置しているので、前項[IV]に記載のように、機体の進行に伴って田面の泥が代掻き装置の隙間部を通って後方に逃げた場合、この後方に逃げた泥が苗植付装置のフロートによって押圧される。本発明の第6特徴によると、苗植付装置の植付機構による植付位置の前方に代掻き装置の回転体が位置しているので、苗植付装置の植付機構による植付位置が適切に代掻き(整地)される。
本発明の第6特徴によると、本発明の第4又は第5特徴と同様に前項[I]〜[V]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第6特徴によると、機体の進行に伴って代掻き装置の隙間部を通って後方に逃げた泥が苗植付装置のフロートによって押圧される点、苗植付装置の植付機構による植付位置が適切に代掻き(整地)される点によって、苗植付装置による苗の植付性能を向上させることができた。
(構成)
本発明の第7特徴は、本発明の第1〜第6特徴の乗用型田植機のうちのいずれか一つにおいて次のように構成することにある。
代掻き装置における右及び左の端部の回転体の外径を、代掻き装置における左右中央側の回転体の外径よりも小さなものに設定する。
代掻き装置における右及び左の端部の回転体に備えられた整地体の数を、代掻き装置における左右中央側の回転体に備えられた整地体の数よりも少ないものに設定する。
本発明の第7特徴(第8特徴)によると、本発明の第1〜第6特徴のうちのいずれか一つと同様に前項[I]〜[VI]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
前項[IV]に記載のように、代掻き装置は一般に苗植付装置の横幅に亘るような横幅の大きなものになることが多いので、前回の植付行程で植え付けられた苗の近くに、代掻き装置の端部が位置することになる。これにより、機体の進行に伴って代掻き装置の端部から横外側に泥の流れが発生すると、この泥の流れによって前回の植付行程で植え付けられた苗が傾くおそれがある。
本発明の第7特徴(第8特徴)によると、本発明の第1〜第6特徴のうちのいずれか一つと同様に前項[I]〜[VI]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第7特徴(第8特徴)によると、機体の進行に伴って代掻き装置の端部から横外側に泥の流れが発生する状態を抑えることができ、この泥の流れによって前回の植付行程で植え付けられた苗が傾くような状態を少なくすることができて、苗植付装置による苗の植付性能を向上させることができた。
(構成)
本発明の第9特徴は、本発明の第1〜第8特徴の乗用型田植機のうちのいずれか一つにおいて次のように構成することにある。
代掻き装置の回転体から後方への泥を飛散を防止するカバーを備える。
本発明の第9特徴によると、本発明の第1〜第8特徴のうちのいずれか一つと同様に前項[I]〜[VII]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
代掻き装置の回転体は比較的高速で回転駆動されるので、代掻き装置の回転体から田面の泥が飛散するのであり、代掻き装置の回転体から後方の苗植付装置への泥の飛散が、カバーによって防止される。
本発明の第9特徴によると、本発明の第1〜第8特徴のうちのいずれか一つと同様に前項[I]〜[VII]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第9特徴によると、代掻き装置の回転体から後方の苗植付装置への泥の飛散を防止することができ、苗植付装置のフロートに泥が乗ることによりフロートの動作が鈍くなるような状態を防止することができて、苗植付装置による苗の植付性能を向上させることができた。
(構成)
本発明の第10特徴は、本発明の第1〜第9特徴の乗用型田植機のうちのいずれか一つにおいて次のように構成することにある。
苗植付装置が停止していると代掻き装置の回転体が自由回転する自由回転状態において機体の進行に伴う代掻き装置の回転体の回転を促進させる回転促進体を備える。
本発明の第10特徴によると、本発明の第1〜第9特徴のうちのいずれか一つと同様に前項[I]〜[VIII]に記載の「作用」を備えており、これに加えて以下のような「作用」を備えている。
前項[I]に記載の自由回転状態を設定した場合、機体の進行に伴う田面からの抵抗だけでは、代掻き装置の回転体が回転し難いことがある。
本発明の第10特徴によると、前項[I]に記載の自由回転状態を設定した状態において、苗植付装置を田面に下降駆動して、苗植付装置のフロートを田面に接地させた状態で走行する場合、機体の進行に伴う田面からの抵抗が代掻き装置の回転体に掛かるのに加えて、機体の進行に伴う田面からの抵抗が回転促進体から代掻き装置の回転体に掛かり、代掻き装置の回転体の回転が促進されることになって、代掻き装置の回転体によって田面が荒らされることがない。
本発明の第10特徴によると、本発明の第1〜第9特徴のうちのいずれか一つと同様に前項[I]〜[VIII]に記載の「発明の効果」を備えており、これに加えて以下のような「発明の効果」を備えている。
本発明の第10特徴によると、自由回転状態を設定した状態において、代掻き装置の回転体の回転が促進されることになり、代掻き装置の回転体によって田面が荒らされる状態を防止することができて、代掻き装置を備えた乗用型田植機の走行性能及び整地性能を向上させることができた。
図1に示すように、右及び左の前輪1、右及び左の後輪2で支持された機体の後部に、リンク機構3及びリンク機構3を昇降駆動する油圧シリンダ4が備えられ、リンク機構3に6条植型式の苗植付装置5が支持されて、乗用型田植機が構成されている。
次に、苗植付装置5について説明する。
図1,2,4に示すように、苗植付装置5は、1個のフィードケース17、3個の伝動ケース6(3個の伝動ケース6は同じもの)、伝動ケース6の後部に回転駆動自在に支持された植付ケース7、植付ケース7の両端に備えられた一対の植付アーム8(植付機構に相当)、3個のフロート9、6個の苗のせ面を備えて左右方向に往復横送り駆動される苗のせ台10、苗のせ台10の苗のせ面の各々に備えられた縦送り機構25等を備えて構成されている。左右方向に配置された支持フレーム18に、フィードケース17及び伝動ケース6が連結されており、フィードケース17がリンク機構3の後部下部の前後軸芯P6(図3参照)周りにローリング自在に支持されている(苗植付装置5がリンク機構3の後部下部の前後軸芯P6周りにローリング自在に支持されている)。
次に、苗植付装置5の昇降制御機能及びローリング制御機能について説明する。
図2及び図11に示すように、伝動ケース6の下部から後方に向けて支持アーム39が延出されて、支持アーム39の後部の左右方向の横軸芯P1周りに、フロート9の後部が上下に揺動自在に支持されている。支持フレーム18から延出されたリンク機構(図示せず)にブラケット40,41が支持され、ブラケット41にポテンショメータ42が固定されて、ブラケット40の左右方向の横軸芯P2周りに中継リンク43が上下に揺動自在に支持されており、ポテンショメータ42の入力アーム42aと中継リンク43とに亘って連係ロッド44が接続されている。
これにより、水平面(田面)に対する苗植付装置5の左右方向の傾斜角度が傾斜センサー48により検出されて、苗植付装置5が水平に維持されるように(田面と左右方向で平行に維持されるように)、ローリング機構46により苗植付装置5がリンク機構3の後部下部の前後軸芯P6周りにローリング駆動される(ローリング制御機能)。
次に、代掻き装置53の構造及び配置について説明する。
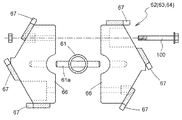
図2,3,10に示すように、右及び左の支持部材26にブラケット54がボルト31によって連結されて、右及び左のブラケット54のボス部54aに亘って支持軸55が回転自在に支持されており、支持軸55の右及び左の端部にアーム55aが連結されて、右及び左のアーム55aにピン55bが連結されている。図2,3,7に示すように、右及び左の支持部材56が備えられており、右及び左の支持部材56の下部にボス部56aが連結され、右及び左の支持部材56の上部に支持板56bが連結されており、支持板56bに長孔56cが形成され、支持板56bにピン56dが連結されている。
次に、代掻き装置53の伝動構造について説明する。
図4及び図6に示すように、支持フレーム18の左の端部に支持部材74が連結され、支持部材74に伝動軸75(伝動機構に相当)が回転自在に支持されて、左の伝動ケース6の入力軸32と伝動軸75とが円筒状の連結部材76により連結されており、支持ブラケット74と左の伝動ケース6とに亘って円筒状のカバー60が取り付けられて、カバー60により伝動軸75が覆われている。
次に、代掻き装置53の作動状態について説明する。
前項[3]に記載のように、昇降レバー73を植付位置に操作すると(回転駆動状態に相当)、昇降制御機能及びローリング制御機能が作動して、植付クラッチが伝動状態に操作される。これにより、前項[3]に記載のように、田面(中央のフロート9)から苗植付装置5までの高さが設定値(設定高さ)に維持されるように、油圧シリンダ4により苗植付装置5及び代掻き装置53が自動的に昇降駆動され、苗植付装置5及び代掻き装置53が水平に維持されるように(田面と左右方向で平行に支持されるように)、ローリング機構46により苗植付装置5及び代掻き装置53がローリング駆動される。
次に、代掻き装置53を備えない場合について説明する。
代掻き装置53を備えない場合、図2〜図10に示すブラケット54、支持軸55、右及び左の支持部材56、バネ57、操作レバー58、レバーガイド59、支持部材74、伝動軸75、連結部材76、一方向クラッチ77、スプロケット78,79、伝動チェーン80、伝動ケース81、ブラケット82、支持アーム83等は装備しない。これ以外の構造は、図2〜図10と同じものを使用する(支持フレーム18や伝動ケース6は共用である)。
図6に示す入力軸32に代えて、図12に示すように少し短い入力軸84を左の伝動ケース6に使用して、伝動ケース6における入力軸84が対向する開口部に、蓋部材85を取り付ける。
前述の[発明を実施するための最良の形態]において、一方向クラッチ77を伝動軸75に外嵌するのではなく、図6に示す代掻き装置53の駆動軸61に一方向クラッチ77を外嵌し、一方向クラッチ77にスプロケット79を外嵌するように構成してもよい。
前述の[発明を実施するための最良の形態]において、一方向クラッチ77を廃止し、動力を伝動及び遮断自在な爪式クラッチ(図示せず)を備えるように構成してもよい。
前述の[発明を実施するための最良の形態][発明の実施の第1別形態]において、図13に示すように構成してもよい。
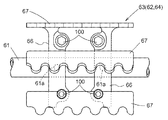
図13に示すように、一方向クラッチ77を伝動軸75(図6参照)に外嵌するのではなく、代掻き装置53の駆動軸61に複数の一方向クラッチ77を外嵌し、一方向クラッチ77に支持板66を外嵌している。これにより、回転駆動状態において代掻き装置53の回転体62,63,64が各々独立に先行回転するのであり、自由回転状態において代掻き装置53の回転体62,63,64が各々独立に回転する。
前述の[発明を実施するための最良の形態][発明の実施の第1別形態][発明の実施の第2別形態]において、図14に示すように構成してもよい。
図14に示すように、代掻き装置53の回転体62,63の支持板66よりも、代掻き装置53の回転体64の支持板66を小さいものに構成して、代掻き装置53の回転体62,63の外径よりも、代掻き装置53の回転体64の外径が小さなものになるように構成している。
前述の[発明を実施するための最良の形態][発明の実施の第1別形態]〜[発明の実施の第3別形態]において、図15に示すように構成してもよい。
図15に示すように、金属製のカバー65(図3,5,7参照)を廃止し、右及び左の支持部材56に亘って支持フレーム86を架設し、代掻き装置53の回転体62,63,64の横幅と略同じ横幅を備えた折れ曲がり自在なゴム製のカバー87を、代掻き装置53の回転体62,63,64の後側に位置するように支持フレーム86に連結している。伝動ケース81及び支持アーム83(図3及び図4参照)に亘って支持ロッド88を架設しており、カバー87を支持ロッド88に当て付けて、カバー87が代掻き装置53の回転体62,63,64に干渉するのを防止している。
前述の[発明を実施するための最良の形態][発明の実施の第1別形態]〜[発明の実施の第4別形態]において、図16(イ)(ロ)に示すように構成してもよい。
図16(イ)(ロ)に示すように、代掻き装置53の駆動軸61の右及び左の端部に、回転促進体89を連結している。回転促進体89は8本の棒部材89aが代掻き装置53の駆動軸61に放射状に連結され、円盤部材89bが代掻き装置53の駆動軸61に連結されて構成されている。回転促進体89(棒部材89a)の外径が代掻き装置53の回転体62,63,64の外径よりも大きなものに構成されており、回転促進体89の円盤部材89bの外径が代掻き装置53の回転体62,63,64の外径と略同じものに構成されている。
前述の[発明を実施するための最良の形態][発明の実施の第1別形態]〜[発明の実施の第5別形態]において、図17に示すように構成してもよい。
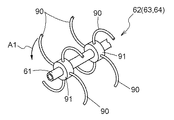
六角状の支持板66及びレーキ状の整地体67(図3,5,8,9参照)により、代掻き装置53の回転体62,63,64を構成するのではなく、図17に示すように、代掻き装置53の駆動軸61に複数個のボス部91を連結し、円弧状に曲がった4本の棒部材90をボス部91の各々に放射状に連結して、代掻き装置53の回転体62,63,64を構成している。この場合、代掻き装置53の回転体62,63,64が、矢印A1の方向に回転駆動されるように構成する。
前述の[発明を実施するための最良の形態][発明の実施の第1別形態]〜[発明の実施の第6別形態]において、図18に示すように構成してもよい。
図18に示すように、代掻き装置53の中央付近の左右方向の横軸芯P5周りに、所定の横幅を備えた検出アーム92を上下に揺動自在に支持し、検出アーム92とポテンショメータ42の入力アーム42aとに亘ってワイヤ93を接続している。
前述の[発明を実施するための最良の形態][発明の実施の第1別形態]〜[発明の実施の第7別形態]において、図19に示すように構成してもよい。
図19に示すように、操作レバー58及びレバーガイド59(図3及び図7参照)を廃止し、右及び左の支持部材56を昇降駆動する電動モータ94(高さ調節機構に相当)、苗植付装置5に対する右及び左の支持部材56の最下降位置を検出する下限スイッチ95及び苗植付装置5に対する右及び左の支持部材56の最上昇位置を検出する上限スイッチ96を備えている。これにより、苗植付装置5に対する代掻き装置53(右及び左の支持部材56)の高さを、電動モータ94によって変更する(最下降位置と最下降位置から少し上側の位置との間の範囲)。
前述の[発明を実施するための最良の形態][発明の実施の第1別形態]〜[発明の実施の第8別形態]において、図20(イ)(ロ)に示すように構成してもよい。
図20(イ)に示すように、伝動チェーン80を少し緩めにスプロケット78,79に巻回し、伝動チェーン80の上側に板バネ状のテンショナー97を配置する。右及び左の支持部材56を上方に付勢するバネ98を備え、上下に揺動自在なストッパー部材99を備えている。
2 後輪
3 リンク機構
5 苗植付装置
8 植付機構
9 フロート
53 代掻き装置
58,59,94 高さ調節機構
62,64,64 回転体
65,87 カバー
67 整地体
69,70,71 隙間部
75,80 伝動機構
77 設定機構、一方向クラッチ
89 回転促進体
Claims (10)
- 前輪及び後輪で支持された機体の後部にリンク機構を備え、前記リンク機構に苗植付装置を支持すると共に、
田面に接地した状態で左右方向の横軸芯周りに回転することにより田面の代掻きを行う回転体を備えて構成された代掻き装置を、前記苗植付装置と後輪との間に備え、前記苗植付装置の動力を代掻き装置に伝達する伝動機構を備えて、
前記苗植付装置が作動していると苗植付装置の動力が伝動機構を介して代掻き装置に伝達されて代掻き装置の回転体が回転駆動される回転駆動状態、及び前記苗植付装置が停止していると代掻き装置の回転体が自由回転する自由回転状態を設定可能な設定機構を備えてある乗用型田植機。 - 田面に接地した状態で田面を前側から後側に掻くように前記代掻き装置の回転体が苗植付装置の動力により回転駆動され、且つ、前記苗植付装置が停止していると田面に接地した状態で田面を前側から後側に掻くように代掻き装置の回転体の自由回転を許容する一方向クラッチを備えて、前記設定機構を構成してある請求項1に記載の乗用型田植機。
- 前記苗植付装置に代掻き装置を支持し、前記苗植付装置に対する代掻き装置の高さを変更自在な高さ調節機構を備えてある請求項1又は2に記載の乗用型田植機。
- 複数の前記回転体を備えて代掻き機置を構成し、田面の泥を後方に逃がすリング状の隙間部を前記代掻き装置の回転体の間に備えてある請求項1〜3のうちのいずれか一つに記載の乗用型田植機。
- 前記後輪の後方に代掻き装置の隙間部を位置させてある請求項4に記載の乗用型田植機。
- 前記苗植付装置に備えられたフロートの前方に代掻き装置の隙間部を位置させ、前記苗植付装置の植付機構による植付位置の前方に代掻き装置の回転体を位置させてある請求項4又は5に記載の乗用型田植機。
- 前記代掻き装置における右及び左の端部の回転体の外径を、前記代掻き装置における左右中央側の回転体の外径よりも小さなものに設定してある請求項1〜6のうちのいずれか一つに記載の乗用型田植機。
- 前記代掻き装置における右及び左の端部の回転体に備えられた整地体の数を、前記代掻き装置における左右中央側の回転体に備えられた整地体の数よりも少ないものに設定してある請求項1〜6のうちのいずれか一つに記載の乗用型田植機。
- 前記代掻き装置の回転体から後方への泥を飛散を防止するカバーを備えてある請求項1〜8のうちのいずれか一つに記載の乗用型田植機。
- 前記苗植付装置が停止していると代掻き装置の回転体が自由回転する自由回転状態において、機体の進行に伴う前記代掻き装置の回転体の回転を促進させる回転促進体を備えてある請求項1〜9のうちのいずれか一つに記載の乗用型田植機。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004166055A JP4484591B2 (ja) | 2004-06-03 | 2004-06-03 | 乗用型田植機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004166055A JP4484591B2 (ja) | 2004-06-03 | 2004-06-03 | 乗用型田植機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005341881A true JP2005341881A (ja) | 2005-12-15 |
| JP2005341881A5 JP2005341881A5 (ja) | 2007-07-12 |
| JP4484591B2 JP4484591B2 (ja) | 2010-06-16 |
Family
ID=35494809
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004166055A Expired - Fee Related JP4484591B2 (ja) | 2004-06-03 | 2004-06-03 | 乗用型田植機 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4484591B2 (ja) |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007228807A (ja) * | 2006-02-27 | 2007-09-13 | Iseki & Co Ltd | 苗移植機 |
| JP2007236263A (ja) * | 2006-03-08 | 2007-09-20 | Mitsubishi Agricult Mach Co Ltd | 移植機 |
| JP2007236262A (ja) * | 2006-03-08 | 2007-09-20 | Mitsubishi Agricult Mach Co Ltd | 移植機 |
| JP2007300827A (ja) * | 2006-05-09 | 2007-11-22 | Kubota Corp | 水田作業機 |
| JP2008079514A (ja) * | 2006-09-26 | 2008-04-10 | Kubota Corp | 水田作業機 |
| JP2008220247A (ja) * | 2007-03-12 | 2008-09-25 | Kubota Corp | 水田作業機 |
| JP2008220248A (ja) * | 2007-03-12 | 2008-09-25 | Kubota Corp | 水田作業機 |
| JP2008228679A (ja) * | 2007-03-22 | 2008-10-02 | Kubota Corp | 水田作業機 |
| JP2008237063A (ja) * | 2007-03-26 | 2008-10-09 | Kubota Corp | 水田作業機 |
| JP2008237062A (ja) * | 2007-03-26 | 2008-10-09 | Kubota Corp | 水田作業機 |
| JP2011019479A (ja) * | 2009-07-17 | 2011-02-03 | Kubota Corp | 整地ロータ構成体 |
| JP2011167202A (ja) * | 2011-04-27 | 2011-09-01 | Iseki & Co Ltd | 乗用田植機 |
| JP2011188770A (ja) * | 2010-03-12 | 2011-09-29 | Kubota Corp | 整地ロータ構成体及び整地ロータ |
| JP2011193805A (ja) * | 2010-03-19 | 2011-10-06 | Mitsubishi Agricultural Machinery Co Ltd | 整地ロータ |
| JP2012055184A (ja) * | 2010-09-06 | 2012-03-22 | Kubota Corp | 水田作業機 |
| JP2012244931A (ja) * | 2011-05-27 | 2012-12-13 | Iseki & Co Ltd | 苗移植機 |
| JP2012249605A (ja) * | 2011-06-06 | 2012-12-20 | Kubota Corp | 水田作業機 |
| JP2013059267A (ja) * | 2011-09-12 | 2013-04-04 | Kubota Corp | 乗用型水田作業機 |
| JP2013230166A (ja) * | 2013-08-22 | 2013-11-14 | Iseki & Co Ltd | 作業機 |
| JP7081649B1 (ja) | 2020-11-27 | 2022-06-07 | 井関農機株式会社 | 乗用型苗移植機 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06237618A (ja) * | 1993-02-16 | 1994-08-30 | Kubota Corp | 水田移植機のフロート構造 |
| JPH09205813A (ja) * | 1996-01-29 | 1997-08-12 | Mitsubishi Agricult Mach Co Ltd | 移植機における代掻装置 |
| JPH09294407A (ja) * | 1996-05-02 | 1997-11-18 | Kubota Corp | 移植機 |
| JPH1056835A (ja) * | 1996-08-20 | 1998-03-03 | Mitsubishi Agricult Mach Co Ltd | 代掻同時移植機 |
| JPH10290604A (ja) * | 1998-05-29 | 1998-11-04 | Mitsubishi Agricult Mach Co Ltd | 移植機 |
| JPH11266604A (ja) * | 1998-03-24 | 1999-10-05 | Mitsubishi Agricult Mach Co Ltd | 移植機 |
| JP2000270629A (ja) * | 1999-03-25 | 2000-10-03 | Kubota Corp | 水田作業機 |
| JP2000300018A (ja) * | 1999-04-15 | 2000-10-31 | Kubota Corp | 田植機の昇降制御装置 |
-
2004
- 2004-06-03 JP JP2004166055A patent/JP4484591B2/ja not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06237618A (ja) * | 1993-02-16 | 1994-08-30 | Kubota Corp | 水田移植機のフロート構造 |
| JPH09205813A (ja) * | 1996-01-29 | 1997-08-12 | Mitsubishi Agricult Mach Co Ltd | 移植機における代掻装置 |
| JPH09294407A (ja) * | 1996-05-02 | 1997-11-18 | Kubota Corp | 移植機 |
| JPH1056835A (ja) * | 1996-08-20 | 1998-03-03 | Mitsubishi Agricult Mach Co Ltd | 代掻同時移植機 |
| JPH11266604A (ja) * | 1998-03-24 | 1999-10-05 | Mitsubishi Agricult Mach Co Ltd | 移植機 |
| JPH10290604A (ja) * | 1998-05-29 | 1998-11-04 | Mitsubishi Agricult Mach Co Ltd | 移植機 |
| JP2000270629A (ja) * | 1999-03-25 | 2000-10-03 | Kubota Corp | 水田作業機 |
| JP2000300018A (ja) * | 1999-04-15 | 2000-10-31 | Kubota Corp | 田植機の昇降制御装置 |
Cited By (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007228807A (ja) * | 2006-02-27 | 2007-09-13 | Iseki & Co Ltd | 苗移植機 |
| JP4676360B2 (ja) * | 2006-03-08 | 2011-04-27 | 三菱農機株式会社 | 移植機 |
| JP2007236263A (ja) * | 2006-03-08 | 2007-09-20 | Mitsubishi Agricult Mach Co Ltd | 移植機 |
| JP2007236262A (ja) * | 2006-03-08 | 2007-09-20 | Mitsubishi Agricult Mach Co Ltd | 移植機 |
| JP2007300827A (ja) * | 2006-05-09 | 2007-11-22 | Kubota Corp | 水田作業機 |
| JP2008079514A (ja) * | 2006-09-26 | 2008-04-10 | Kubota Corp | 水田作業機 |
| JP4653713B2 (ja) * | 2006-09-26 | 2011-03-16 | 株式会社クボタ | 水田作業機 |
| JP2008220247A (ja) * | 2007-03-12 | 2008-09-25 | Kubota Corp | 水田作業機 |
| JP2008220248A (ja) * | 2007-03-12 | 2008-09-25 | Kubota Corp | 水田作業機 |
| JP2008228679A (ja) * | 2007-03-22 | 2008-10-02 | Kubota Corp | 水田作業機 |
| JP2008237063A (ja) * | 2007-03-26 | 2008-10-09 | Kubota Corp | 水田作業機 |
| JP2008237062A (ja) * | 2007-03-26 | 2008-10-09 | Kubota Corp | 水田作業機 |
| JP2011019479A (ja) * | 2009-07-17 | 2011-02-03 | Kubota Corp | 整地ロータ構成体 |
| JP2011188770A (ja) * | 2010-03-12 | 2011-09-29 | Kubota Corp | 整地ロータ構成体及び整地ロータ |
| JP2011193805A (ja) * | 2010-03-19 | 2011-10-06 | Mitsubishi Agricultural Machinery Co Ltd | 整地ロータ |
| JP2012055184A (ja) * | 2010-09-06 | 2012-03-22 | Kubota Corp | 水田作業機 |
| JP2011167202A (ja) * | 2011-04-27 | 2011-09-01 | Iseki & Co Ltd | 乗用田植機 |
| JP2012244931A (ja) * | 2011-05-27 | 2012-12-13 | Iseki & Co Ltd | 苗移植機 |
| JP2012249605A (ja) * | 2011-06-06 | 2012-12-20 | Kubota Corp | 水田作業機 |
| JP2013059267A (ja) * | 2011-09-12 | 2013-04-04 | Kubota Corp | 乗用型水田作業機 |
| JP2013230166A (ja) * | 2013-08-22 | 2013-11-14 | Iseki & Co Ltd | 作業機 |
| JP7081649B1 (ja) | 2020-11-27 | 2022-06-07 | 井関農機株式会社 | 乗用型苗移植機 |
| JP2022088697A (ja) * | 2020-11-27 | 2022-06-15 | 井関農機株式会社 | 乗用型苗移植機 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4484591B2 (ja) | 2010-06-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4484591B2 (ja) | 乗用型田植機 | |
| JP4350102B2 (ja) | 乗用型田植機 | |
| JP2005341881A5 (ja) | ||
| JP4835248B2 (ja) | 苗移植機 | |
| JP5600892B2 (ja) | 作業機 | |
| JP5276545B2 (ja) | 水田作業車 | |
| JP4769282B2 (ja) | 田植機 | |
| JP2007252319A (ja) | 農作業機 | |
| JP4484754B2 (ja) | 田植機 | |
| JP2008005744A (ja) | 苗植機 | |
| JP2013179854A (ja) | 苗移植機の整地装置 | |
| JP4887564B2 (ja) | 苗植機 | |
| JP5803278B2 (ja) | 苗移植機 | |
| JP2007143521A (ja) | 複数条植えの苗植機 | |
| JP5761298B2 (ja) | 苗移植機 | |
| JP2008253231A (ja) | 走行車体 | |
| JP2011139670A (ja) | 水田作業機 | |
| JP2009118830A (ja) | 歩行型の苗移植機 | |
| JP3632418B2 (ja) | 苗移植機 | |
| JP5391859B2 (ja) | 作業機 | |
| JP7109357B2 (ja) | 作業機 | |
| JPH09248024A (ja) | 農作業機 | |
| JP2005304339A (ja) | 苗植機の苗植伝動装置 | |
| JP7113738B2 (ja) | 作業機 | |
| JP5136464B2 (ja) | 苗植機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070516 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090630 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090702 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100318 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100323 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130402 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130402 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140402 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |