JP2004502154A - 照り返しに耐性のある位置判定システム - Google Patents
照り返しに耐性のある位置判定システム Download PDFInfo
- Publication number
- JP2004502154A JP2004502154A JP2002506039A JP2002506039A JP2004502154A JP 2004502154 A JP2004502154 A JP 2004502154A JP 2002506039 A JP2002506039 A JP 2002506039A JP 2002506039 A JP2002506039 A JP 2002506039A JP 2004502154 A JP2004502154 A JP 2004502154A
- Authority
- JP
- Japan
- Prior art keywords
- target
- target surface
- base
- image
- target device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/0025—Measuring of vehicle parts
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/26—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes
- G01B11/275—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes for testing wheel alignment
- G01B11/2755—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes for testing wheel alignment using photoelectric detection means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/24—Measuring arrangements characterised by the use of mechanical techniques for measuring angles or tapers; for testing the alignment of axes
- G01B5/255—Measuring arrangements characterised by the use of mechanical techniques for measuring angles or tapers; for testing the alignment of axes for testing wheel alignment
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/12—Method or fixture for calibrating the wheel aligner
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/14—One or more cameras or other optical devices capable of acquiring a two-dimensional image
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/14—One or more cameras or other optical devices capable of acquiring a two-dimensional image
- G01B2210/143—One or more cameras on each side of a vehicle in the main embodiment
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/16—Active or passive device attached to the chassis of a vehicle
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/20—Vehicle in a state of translatory motion
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/26—Algorithms, instructions, databases, computerized methods and graphical user interfaces employed by a user in conjunction with the wheel aligner
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/30—Reference markings, reflector, scale or other passive device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/30—Reference markings, reflector, scale or other passive device
- G01B2210/303—Reference markings, reflector, scale or other passive device fixed to the ground or to the measuring station
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Body Structure For Vehicles (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Vehicle Body Suspensions (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
太陽からなどの照り返しによって引起される干渉に耐性のある改善された位置判定システム。ある物体の位置的なパラメータを判定するための位置判定システムは、物体に装着するように形作られたベース、ベースに接続された第1および第2のターゲット表面を含むターゲット機器を有し、第1のターゲット表面および第2のターゲット表面が位置する面は互いに平行でない。位置判定システムは、ターゲット機器に交わる視線経路を形成し、ターゲット機器の幾何学的な特徴を示す画像情報を生成するように形作られた画像感知機器と、画像感知機器に結合するように構成され、画像情報に基づいて物体の配向を判定するためのデータ処理機器とをさらに含む。もし照り返しの結果としてターゲット表面の一方が不明瞭になっても、他方のターゲット表面の画像だけで物体の配向を判定するのに十分である。
Description
【0001】
【関連する出願】
この発明は、2000年4月25日に出願された「車の下回りの診断システムおよび方法」(“UNDER CAR DIAGNOSTICS SYSTMS AND METHODS”)と題される米国仮特許出願第60/199,366号、および2000年6月28日に出願された「車の下回りの診断を行なうための方法および装置」(“METHOD AND APPARATUS FOR PERFORMING UNDERCAR DIAGNOSTICS”)と題される第60/214,390号からの優先権の利益を主張する。
【0002】
【発明の分野】
この発明は改善された位置判定システムに関し、特に照り返しによって引起される干渉に耐性のある位置判定システムに関する。
【0003】
【発明の背景】
車輪アライメントシステムなどのある種の位置判定システムは、光学的感知機器を用いた映像画像化システムを使用してさまざまなターゲット機器の位置を判定する。この種の車輪アライメントシステムは、車高、トウ曲線、チルト角度、および車両の車輪に対する車体の角度的な関係などの車両についての位置的な情報を得ることができる。
【0004】
自動車の車輪は多くの方法でアライメントすることができる。たとえば、オペレータまたはアライメント技術者が、カメラなどの画像感知機器を用いたコンピュータ支援3次元(3D)マシン映像などの映像画像化システムを使用して、さまざまなターゲット機器の位置を判定することができる。そのような映像画像化システムは、典型的にはアライメントの目的のために使用されるが、これらのシステムは自動車についての他の位置的および角度的な配向情報を得るために使用することもできる。そのような装置および方法の例は、1998年3月10日にジャクソン(Jackson)らに発行された「モータ車の車輪のアライメントを決定するための方法および装置」(“Method and Apparatus for Determining the Alignment of Motor Vehicle Wheels”)と題される米国特許第5,724,743号、および1996年7月16日にジャクソン(Jackson)らに発行された「モータ車の車輪のアライメントを決定するための方法および装置」(“Method and Apparatus for Determining the Alignment of Motor Vehicle Wheels”)と題される米国特許第5,535,522号に開示され、これらはそれぞれここに引用により援用される。
【0005】
多くの場合、そのような映像画像化システムとともにコンピュータが使用されて、ターゲット機器上の特定の幾何学的な特徴を識別することによりターゲット機器の配向を計算する。コンピュータは斜視測定値をとり、これらの測定値をコンピュータのメモリに事前にプログラムされた真の画像と比較する。
【0006】
車輪アライメントシステムで使用することができる典型的なターゲット機器の一例が図1に例示される。ターゲット機器54は、ある平坦な面からなり、その上に2つまたはそれ以上の異なるサイズの円62、63のパターンが予め定められたフォーマットで印されている。具体的なパターンが示されているが、多くの異なるパターンをターゲット機器54上で使用することができる。実際、数学的な記号または真の画像(すなわちその主面に対して垂直にターゲット機器を見ることによってとられた画像)に対応するデータ、およびターゲット機器の寸法がコンピュータのメモリに事前にプログラムされるため、アライメントプロセス中、コンピュータは参照画像を有し、ターゲット機器の観察された斜視図をこれと比較することができる。
【0007】
コンピュータは、ターゲット機器上の特定の幾何学的な特徴を識別することによってターゲット機器54の配向を計算する。コンピュータは斜視測定値をとり、これらの測定値をコンピュータのメモリに事前にプログラムされた真の画像と比較する。
【0008】
コンピュータはたとえば、重心計算により円62a、62bの各々の中心を計算することができる。これは、ある物体の中心点または中心線の位置決めを判定するために画像分析コンピュータによって広く使用されている方法である。2つの円62a、62bの中心点が決定されると、2つの間の距離を測定することができる。その後、このプロセスが、ターゲット機器54上のパターン中の他の円についても繰返される。それから、これらの距離をそれぞれの中心間の真の距離(すなわち非斜視距離)と比較することができる。同様に、2つの中心を結ぶ線の、水平(または垂直)に対する角度を決定することができる。すると、ターゲット機器54の配向がどうであるかについての計算を行なうことができる。
【0009】
他の計算方法を使用してターゲット機器54の配向を判定することもできる。米国特許第5,535,522号および第5,724,743号の中でより詳しく説明されるように、たとえば、円の1つにだけ、たとえば円63にだけカメラの狙いをつけ、その斜視画像(歪んだ楕円)を使用することにより、その円の配向を計算し、よってターゲット機器54の配向を計算することができる。
【0010】
ターゲット機器および画像感知機器を使用する位置判定システムは、太陽などの強い光源下で動作されるとき、しばしば問題に遭遇する。強い光が存在すると、ターゲット機器の面がカメラのレンズに入る方向に光を反射することがある。強い光がカメラに反射されると、ブルーミングと呼ばれる大きな白点が生じる。ブルーミングはターゲット機器からの画像の受取りを妨げる。ターゲット機器の中には99%光を反射しない材料から作られているものもあるが、太陽などの強い光源からの光の1%の反射は、太陽がターゲットから外れるまで、依然として測定値に問題を引起す可能性がある。太陽が空を動くのにつれてターゲットまたは光学部品を動かすことは実際的でない。
【0011】
【発明の概要】
よって、照り返しによって引起される位置判定システムに対する影響を減らす必要がある。また、強い光源の存在下での位置判定を可能にする必要もある。さらに、照り返しによって引起される干渉に耐性があり、かつ装備を動かしたり調整することを必要としない位置判定システムを提供する必要もある。
【0012】
これらおよび他の必要性がこの発明で扱われる。この発明は、ターゲット機器を使用し、強い光源からの干渉を防止する改善された位置判定システムを提供する。この発明は、照り返しからの干渉を排除することにより測定値の精度を向上させる。
【0013】
この発明の一局面は、ある物体に装着するためのターゲット機器に関する。ターゲット機器は、物体上に装着するように形作られたベース、ベースに接続された第1のターゲット表面およびベースに接続された第2のターゲット表面を含み、第1のターゲット表面と第2のターゲット表面とは異なる面上にある。ターゲット表面が位置する面は互いに平行でない。ターゲット表面は平行でない面上にあるため、第1のターゲット表面上に照り返しを起こすいかなる光源も、第2のターゲット表面上に照り返しを起こさない。もし第1のターゲット表面によって反射された光が干渉を引起しても、第2のターゲット表面の画像は依然として処理用に使用可能である。よって、照り返しによって引起される干渉は排除される。
【0014】
一実施例によると、ある物体の位置的なパラメータを測定するための位置判定システムは、物体に装着するように形作られたベースと、ベースに接続された第1のターゲット表面およびベースに接続された第2のターゲット表面とを含むターゲット機器を含み、第1のターゲット表面および第2のターゲット表面が位置する面は平行でない。位置判定システムは、ターゲット機器に交わる視線経路を形成し、ターゲット機器の幾何学的な特徴を示す画像情報を生成するように形作られた画像感知機器と、画像感知機器に結合するように構成され、ターゲット機器が装着されたターゲット機器または物体の配向を画像情報に基づいて決定するためのデータ処理機器とを含む。
【0015】
測定中、ターゲット機器は、車両の車輪などの物体に装着され、各測定が行なわれる。ターゲット表面の画像は、カメラなどの画像感知機器によって捕捉され、画像感知機器に結合された制御機またはコンピュータなどのデータ処理機器によって分析される。
【0016】
この発明の一局面によると、データ処理機器は、アライメントなどの位置判定ソフトウェアを実行し、画像感知機器によって捕捉された画像を表す画像情報を受取るように構成される。位置判定プロセス中に使用されるターゲット機器の配向は、画像情報に基づいて判定される。画像情報は、ある参照位置で捕捉されたターゲット機器の画像を表す参照情報と比較してもよい。これに代えて、参照位置は、ベースの面に対して垂直な角度から見られてもよい。参照情報は、ハードドライブメモリから得られてもよい。
【0017】
例として、両ターゲット表面の画像は画像感知機器によって捕捉され、画像情報に変換されてデータ処理機器によって処理される。一方のターゲット表面が照り返しを発生し、これが画像感知機器が受取る画像に干渉しても常に、他方のターゲット表面は、上述のように、ターゲット表面の幾何学的な特徴を示す信頼性のある画像情報を依然として提供する。よって、照り返しによる干渉は排除される。
【0018】
さらに、この発明の他の利点は、単にこの発明の例示であり制限ではない以下の詳細な説明から容易に明らかになるであろう。理解されるように、この発明は他のおよび異なる実施例が可能であり、そのいくつかの詳細点は、さまざまな明らかな点において、すべてこの発明を離れることなく変更することが可能である。よって、図面および説明は、限定的なものではなく例示的な性質のものとして理解されるべきである。
【0019】
この発明は、同じ参照番号が同じ要素を示す添付の図面の図の中で、限定ではなく例として、例示される。
【0020】
【好ましい実施例の説明】
照り返しの干渉に耐性のある位置判定システムを提供するための技術がこの発明をよりよく説明するために提示される。以下の説明では、説明の目的のため、多くの具体的な詳細が説明されて、この発明の徹底的な理解を提供する。しかしながら、当業者にとっては、この発明はこのような具体的な詳細なしに実行できることは明らかであろう。場合によっては、不必要にこの発明をわかりにくくすることを避けるため、周知の構造および機器がブロック図の形で示される。
【0021】
この発明によって実行される位置判定システムは、ある物体についての位置的な情報を得ることができる。たとえば、位置判定システムを使用して、車高、トウ曲線、チルト角度、および車両の車輪に対する車体の角度的な関係を測定することができる。
【0022】
この発明を実行することができる位置判定システムの一例が図2に例示される。位置判定システム100は映像画像化システム102を含み、これは固定され空間をあけられ、ビーム114に搭載される1対のカメラ110、112を有する。ビーム114は、カメラ110、112をそれぞれ車両の両側の外に位置させて位置判定システム100によって画像化されるようにするのに十分なある長さを有する。またビーム114は、カメラ110、112を工場の床116から十分な高さに位置させて、車両の左側上の2つのターゲット機器118、120が共に左側のカメラ110の視界内にあり、車両の右側上の2つのターゲット機器122、124が共に右側のカメラ112の視界内にあることを確実にする。
【0023】
ターゲット機器118、120、122、124は、自動車の各車輪126、128、130、132に搭載され、各ターゲット機器118、120、120、124はターゲット本体134、および装着装置138を含む。装着装置138は、ターゲット機器118、120、120、124を車輪126、128、130、132に装着する。装着装置の一例が、ここに引用により援用される、1991年6月18にボーナー(Borner)らに発行された「車輪調整用リムクランプのつめ」(“Wheel Alignment Rim Clamp Claw”)と題される米国特許第5,024,001号の中で説明される。
【0024】
米国特許第5,535,522号および第5,724,743号に示されるように、動作において、位置判定システム100が較正ターゲット(図示せず)を使用して較正されると、車両を台133上に駆動することができ、所望であれば車両を適切な修理のための高さに持上げることができる。ターゲット機器118、120、122、124は、一旦車輪のリムに取付けられると、ターゲット機器はそれぞれのカメラ110、112に対面するように配向される。
【0025】
コンピュータで実現されたデータベースを用いて、ターゲットの位置の判定を支援してもよい。例として、車両のモデルおよび年式を、車両VIN番号、ナンバープレートの番号、所有者名などの他の識別用のパラメータとともに映像画像化システム102に入力することができる。映像画像化システム102に関連するデータベースは、好ましくは検査される車両の各モデルの仕様を含む。検査されている車両が識別されると、具体的な車両のモデルに関連する情報がデータベースから引出され、ターゲット機器118、120、122、124の位置の判定を支援する。これに代えて、具体的な車両の以前の検査履歴を使用して、ターゲット機器118、120、122、124のとりそうな位置を示してもよい。
【0026】
ターゲット機器が装着される車輪126、128、130、132のリムに対するターゲット機器118、120、122、124の場所は、典型的には約0.01″および約0.01°の精度まで知られている。ターゲット機器118、120、122、124がある位置で画像化されると、車輪126、128、130、132は別の位置に転がされ、新たな画像をとることができる。ターゲット機器118、120、122、124が2つの位置において画像化された場所を使用して、車輪126、128、130、132の実際の位置および配向、ならびに車輪軸を映像画像化システム102により計算することができる。2つの位置間の距離は変化するが、この距離は多くの場合、前後ともに約8インチである。
【0027】
図3aおよび3bは、この発明によって実行されるターゲット機器の例を例示する。図3aのターゲット機器20は、ベース21と、ベースから延びる第1のターゲット表面22および第2のターゲット表面23とを有する。図1に示される円のようなパターンがターゲット表面に提供される。ベース21は、測定が行なわれることになる、図2に例示されるターゲット本体134または装着装置138のような物体に装着するように形作られる。一実施例では、ターゲット本体134はベース21として働き、ターゲット表面はターゲット本体134に装着される。別の例として、装着装置138はターゲット機器のベースとして働き、ターゲット表面は装着装置に接続される。ターゲット表面22とターゲット表面23との間の角度はθである。ターゲット表面間の適切な角度θは、システムが使用されることになる環境において実験的に測定することができる。角度θは、環境および用いられる光学部品に依存して、典型的には170°またはそれ以下である。
【0028】
図3bに例示されるターゲット機器の別の実施例は26として示され、第1のターゲット表面27は第2のターゲット表面28に接続されている。図3aに例示されるターゲット機器とは違い、ターゲット表面27が位置する面はベース21に対して平行でない。ターゲット表面27と28との間の角度はθであり、図3aのθと同様、実験的に容易に決定することができる。
【0029】
図4aおよび4bは、この発明によって実行され、強い光源下で動作されるターゲット機器の一例を例示する。図4aでは、図3aで例示されるものと同様のターゲット機器20がある物体31の表面に装着される。ターゲット表面22および23は、図1に例示されるものと同様のパターンを有する。カメラ33はターゲット機器20から画像を捕捉するために使用される。ターゲット表面22および23上のパターンの画像は、それぞれ経路32および34を通してカメラ33により捕捉される。
【0030】
図4bは、この発明によって実行されるターゲット機器に対する強い光源の影響を示す。日光35と、ターゲット表面22に対して垂直なライン39との間の角度αが、経路32とライン39との間の角度βと等しくなるある特定の位置に太陽30が動くと、日光35はターゲット表面22によって反射され、カメラ33がターゲット表面22上のパターンから画像をそれにより捕捉するところの経路32に沿ってカメラ33に入る。この場合、日光35の反射はターゲット表面22から捕捉されるパターン画像に干渉する。
【0031】
しかしながら、ターゲット表面22と23とは平行でない面上に位置するため、日光35はターゲット表面23によって反射されず、よってターゲット表面23から経路34に沿って捕捉されるパターン画像に干渉しない。したがって、位置的なパラメータの計算は影響を受けない画像に基づいて行なうことができる。よって、照り返しからの干渉は排除される。
【0032】
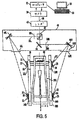
別の例として、図5はこの発明によって実行されるある車輪アライメントシステムを示す。車輪アライメントが行なわれることとなる自動車20は、そのシャシの概略的な図示により示され、2つの前輪22Lおよび22R、ならびに2つの後輪24Lおよび24Rを含んで示される。自動車200は、点線で示される従来の車輪アライメント検査ベッド上に位置されて示される。システムは、図3aまたは3bに示されるものと同様のターゲット機器54を使用し、ターゲット表面22および23はそれに装着されている。
【0033】
カメラ30は、レンズと鏡との組合せを使用することにより、ターゲット機器54に交わる視線経路を形成する。カメラ30は、レンズ40を通る観察経路38に沿って、車輪22L、22R、24Lおよび24R上に装着された各ターゲット機器54のターゲット表面の1つと、ビームスプリッタ42および鏡46Lならびに46Rとの両方に同時に狙いをつける。鏡46Lおよび46Rは、各車輪の画像が別々の鏡によって捕捉されるように、異なる車輪に狙いをつける複数の鏡を含んでもよい。
【0034】
コンピュータ32はカメラ30に結合される。カメラ30によって捕捉される画像は、コンピュータ32によってアクセス可能な画像情報に変換される。位置的なパラメータの計算は、照り返しによって影響されない画像情報に基づいて行なわれる。一実施例によると、照り返しによって生じる画像情報はローパスフィルタ回路により除去することができる。
【0035】
コンピュータ32は、ある特定の角度から見られたターゲット表面上のパターンについての情報を記憶する。この情報を使用して、ターゲット表面および車輪の面の配向を計算することができる。一実施例では、ターゲット機器のベースに対して垂直なある角度から見られたパターンがコンピュータ32に記憶される。2つのターゲット表面間の角度、ターゲット機器の寸法およびターゲット表面とベースとの間の角度などのターゲット機器の構成に関する情報は、先に説明した実施例のようにコンピュータ32に事前に記憶することができるが、ターゲットの画像に基づいて物体の配向を判定するために行なわれる計算の詳細は引用される特許に示される。
【0036】
この発明はある例示的な実施例に関して説明されてきたが、この発明は開示された実施例に制限されるのではなく、反対に、上掲の特許請求の範囲の精神および範囲に含まれるさまざまな変更および均等の変形を含むように意図されていることが理解されるべきである。
【図面の簡単な説明】
【図1】図1は、車両の車輪上で位置判定のために使用することができるある典型的なターゲット機器の一例を例示する。
【図2】図2は、この発明を実行することができるある位置判定システムの一例を示す。
【図3a】図3aは、この発明によって実行されるターゲット機器の例の斜視図である。
【図3b】図3bは、この発明によって実行されるターゲット機器の例の斜視図である。
【図4a】図4aは、この発明によって実行され、強い光源下で動作されるあるターゲット機器の一例を例示する。
【図4b】図4bは、この発明によって実行され、強い光源下で動作されるあるターゲット機器の一例を例示する。
【図5】図5は、この発明によって実行されるある車輪アライメントシステムの一例を示す。
【関連する出願】
この発明は、2000年4月25日に出願された「車の下回りの診断システムおよび方法」(“UNDER CAR DIAGNOSTICS SYSTMS AND METHODS”)と題される米国仮特許出願第60/199,366号、および2000年6月28日に出願された「車の下回りの診断を行なうための方法および装置」(“METHOD AND APPARATUS FOR PERFORMING UNDERCAR DIAGNOSTICS”)と題される第60/214,390号からの優先権の利益を主張する。
【0002】
【発明の分野】
この発明は改善された位置判定システムに関し、特に照り返しによって引起される干渉に耐性のある位置判定システムに関する。
【0003】
【発明の背景】
車輪アライメントシステムなどのある種の位置判定システムは、光学的感知機器を用いた映像画像化システムを使用してさまざまなターゲット機器の位置を判定する。この種の車輪アライメントシステムは、車高、トウ曲線、チルト角度、および車両の車輪に対する車体の角度的な関係などの車両についての位置的な情報を得ることができる。
【0004】
自動車の車輪は多くの方法でアライメントすることができる。たとえば、オペレータまたはアライメント技術者が、カメラなどの画像感知機器を用いたコンピュータ支援3次元(3D)マシン映像などの映像画像化システムを使用して、さまざまなターゲット機器の位置を判定することができる。そのような映像画像化システムは、典型的にはアライメントの目的のために使用されるが、これらのシステムは自動車についての他の位置的および角度的な配向情報を得るために使用することもできる。そのような装置および方法の例は、1998年3月10日にジャクソン(Jackson)らに発行された「モータ車の車輪のアライメントを決定するための方法および装置」(“Method and Apparatus for Determining the Alignment of Motor Vehicle Wheels”)と題される米国特許第5,724,743号、および1996年7月16日にジャクソン(Jackson)らに発行された「モータ車の車輪のアライメントを決定するための方法および装置」(“Method and Apparatus for Determining the Alignment of Motor Vehicle Wheels”)と題される米国特許第5,535,522号に開示され、これらはそれぞれここに引用により援用される。
【0005】
多くの場合、そのような映像画像化システムとともにコンピュータが使用されて、ターゲット機器上の特定の幾何学的な特徴を識別することによりターゲット機器の配向を計算する。コンピュータは斜視測定値をとり、これらの測定値をコンピュータのメモリに事前にプログラムされた真の画像と比較する。
【0006】
車輪アライメントシステムで使用することができる典型的なターゲット機器の一例が図1に例示される。ターゲット機器54は、ある平坦な面からなり、その上に2つまたはそれ以上の異なるサイズの円62、63のパターンが予め定められたフォーマットで印されている。具体的なパターンが示されているが、多くの異なるパターンをターゲット機器54上で使用することができる。実際、数学的な記号または真の画像(すなわちその主面に対して垂直にターゲット機器を見ることによってとられた画像)に対応するデータ、およびターゲット機器の寸法がコンピュータのメモリに事前にプログラムされるため、アライメントプロセス中、コンピュータは参照画像を有し、ターゲット機器の観察された斜視図をこれと比較することができる。
【0007】
コンピュータは、ターゲット機器上の特定の幾何学的な特徴を識別することによってターゲット機器54の配向を計算する。コンピュータは斜視測定値をとり、これらの測定値をコンピュータのメモリに事前にプログラムされた真の画像と比較する。
【0008】
コンピュータはたとえば、重心計算により円62a、62bの各々の中心を計算することができる。これは、ある物体の中心点または中心線の位置決めを判定するために画像分析コンピュータによって広く使用されている方法である。2つの円62a、62bの中心点が決定されると、2つの間の距離を測定することができる。その後、このプロセスが、ターゲット機器54上のパターン中の他の円についても繰返される。それから、これらの距離をそれぞれの中心間の真の距離(すなわち非斜視距離)と比較することができる。同様に、2つの中心を結ぶ線の、水平(または垂直)に対する角度を決定することができる。すると、ターゲット機器54の配向がどうであるかについての計算を行なうことができる。
【0009】
他の計算方法を使用してターゲット機器54の配向を判定することもできる。米国特許第5,535,522号および第5,724,743号の中でより詳しく説明されるように、たとえば、円の1つにだけ、たとえば円63にだけカメラの狙いをつけ、その斜視画像(歪んだ楕円)を使用することにより、その円の配向を計算し、よってターゲット機器54の配向を計算することができる。
【0010】
ターゲット機器および画像感知機器を使用する位置判定システムは、太陽などの強い光源下で動作されるとき、しばしば問題に遭遇する。強い光が存在すると、ターゲット機器の面がカメラのレンズに入る方向に光を反射することがある。強い光がカメラに反射されると、ブルーミングと呼ばれる大きな白点が生じる。ブルーミングはターゲット機器からの画像の受取りを妨げる。ターゲット機器の中には99%光を反射しない材料から作られているものもあるが、太陽などの強い光源からの光の1%の反射は、太陽がターゲットから外れるまで、依然として測定値に問題を引起す可能性がある。太陽が空を動くのにつれてターゲットまたは光学部品を動かすことは実際的でない。
【0011】
【発明の概要】
よって、照り返しによって引起される位置判定システムに対する影響を減らす必要がある。また、強い光源の存在下での位置判定を可能にする必要もある。さらに、照り返しによって引起される干渉に耐性があり、かつ装備を動かしたり調整することを必要としない位置判定システムを提供する必要もある。
【0012】
これらおよび他の必要性がこの発明で扱われる。この発明は、ターゲット機器を使用し、強い光源からの干渉を防止する改善された位置判定システムを提供する。この発明は、照り返しからの干渉を排除することにより測定値の精度を向上させる。
【0013】
この発明の一局面は、ある物体に装着するためのターゲット機器に関する。ターゲット機器は、物体上に装着するように形作られたベース、ベースに接続された第1のターゲット表面およびベースに接続された第2のターゲット表面を含み、第1のターゲット表面と第2のターゲット表面とは異なる面上にある。ターゲット表面が位置する面は互いに平行でない。ターゲット表面は平行でない面上にあるため、第1のターゲット表面上に照り返しを起こすいかなる光源も、第2のターゲット表面上に照り返しを起こさない。もし第1のターゲット表面によって反射された光が干渉を引起しても、第2のターゲット表面の画像は依然として処理用に使用可能である。よって、照り返しによって引起される干渉は排除される。
【0014】
一実施例によると、ある物体の位置的なパラメータを測定するための位置判定システムは、物体に装着するように形作られたベースと、ベースに接続された第1のターゲット表面およびベースに接続された第2のターゲット表面とを含むターゲット機器を含み、第1のターゲット表面および第2のターゲット表面が位置する面は平行でない。位置判定システムは、ターゲット機器に交わる視線経路を形成し、ターゲット機器の幾何学的な特徴を示す画像情報を生成するように形作られた画像感知機器と、画像感知機器に結合するように構成され、ターゲット機器が装着されたターゲット機器または物体の配向を画像情報に基づいて決定するためのデータ処理機器とを含む。
【0015】
測定中、ターゲット機器は、車両の車輪などの物体に装着され、各測定が行なわれる。ターゲット表面の画像は、カメラなどの画像感知機器によって捕捉され、画像感知機器に結合された制御機またはコンピュータなどのデータ処理機器によって分析される。
【0016】
この発明の一局面によると、データ処理機器は、アライメントなどの位置判定ソフトウェアを実行し、画像感知機器によって捕捉された画像を表す画像情報を受取るように構成される。位置判定プロセス中に使用されるターゲット機器の配向は、画像情報に基づいて判定される。画像情報は、ある参照位置で捕捉されたターゲット機器の画像を表す参照情報と比較してもよい。これに代えて、参照位置は、ベースの面に対して垂直な角度から見られてもよい。参照情報は、ハードドライブメモリから得られてもよい。
【0017】
例として、両ターゲット表面の画像は画像感知機器によって捕捉され、画像情報に変換されてデータ処理機器によって処理される。一方のターゲット表面が照り返しを発生し、これが画像感知機器が受取る画像に干渉しても常に、他方のターゲット表面は、上述のように、ターゲット表面の幾何学的な特徴を示す信頼性のある画像情報を依然として提供する。よって、照り返しによる干渉は排除される。
【0018】
さらに、この発明の他の利点は、単にこの発明の例示であり制限ではない以下の詳細な説明から容易に明らかになるであろう。理解されるように、この発明は他のおよび異なる実施例が可能であり、そのいくつかの詳細点は、さまざまな明らかな点において、すべてこの発明を離れることなく変更することが可能である。よって、図面および説明は、限定的なものではなく例示的な性質のものとして理解されるべきである。
【0019】
この発明は、同じ参照番号が同じ要素を示す添付の図面の図の中で、限定ではなく例として、例示される。
【0020】
【好ましい実施例の説明】
照り返しの干渉に耐性のある位置判定システムを提供するための技術がこの発明をよりよく説明するために提示される。以下の説明では、説明の目的のため、多くの具体的な詳細が説明されて、この発明の徹底的な理解を提供する。しかしながら、当業者にとっては、この発明はこのような具体的な詳細なしに実行できることは明らかであろう。場合によっては、不必要にこの発明をわかりにくくすることを避けるため、周知の構造および機器がブロック図の形で示される。
【0021】
この発明によって実行される位置判定システムは、ある物体についての位置的な情報を得ることができる。たとえば、位置判定システムを使用して、車高、トウ曲線、チルト角度、および車両の車輪に対する車体の角度的な関係を測定することができる。
【0022】
この発明を実行することができる位置判定システムの一例が図2に例示される。位置判定システム100は映像画像化システム102を含み、これは固定され空間をあけられ、ビーム114に搭載される1対のカメラ110、112を有する。ビーム114は、カメラ110、112をそれぞれ車両の両側の外に位置させて位置判定システム100によって画像化されるようにするのに十分なある長さを有する。またビーム114は、カメラ110、112を工場の床116から十分な高さに位置させて、車両の左側上の2つのターゲット機器118、120が共に左側のカメラ110の視界内にあり、車両の右側上の2つのターゲット機器122、124が共に右側のカメラ112の視界内にあることを確実にする。
【0023】
ターゲット機器118、120、122、124は、自動車の各車輪126、128、130、132に搭載され、各ターゲット機器118、120、120、124はターゲット本体134、および装着装置138を含む。装着装置138は、ターゲット機器118、120、120、124を車輪126、128、130、132に装着する。装着装置の一例が、ここに引用により援用される、1991年6月18にボーナー(Borner)らに発行された「車輪調整用リムクランプのつめ」(“Wheel Alignment Rim Clamp Claw”)と題される米国特許第5,024,001号の中で説明される。
【0024】
米国特許第5,535,522号および第5,724,743号に示されるように、動作において、位置判定システム100が較正ターゲット(図示せず)を使用して較正されると、車両を台133上に駆動することができ、所望であれば車両を適切な修理のための高さに持上げることができる。ターゲット機器118、120、122、124は、一旦車輪のリムに取付けられると、ターゲット機器はそれぞれのカメラ110、112に対面するように配向される。
【0025】
コンピュータで実現されたデータベースを用いて、ターゲットの位置の判定を支援してもよい。例として、車両のモデルおよび年式を、車両VIN番号、ナンバープレートの番号、所有者名などの他の識別用のパラメータとともに映像画像化システム102に入力することができる。映像画像化システム102に関連するデータベースは、好ましくは検査される車両の各モデルの仕様を含む。検査されている車両が識別されると、具体的な車両のモデルに関連する情報がデータベースから引出され、ターゲット機器118、120、122、124の位置の判定を支援する。これに代えて、具体的な車両の以前の検査履歴を使用して、ターゲット機器118、120、122、124のとりそうな位置を示してもよい。
【0026】
ターゲット機器が装着される車輪126、128、130、132のリムに対するターゲット機器118、120、122、124の場所は、典型的には約0.01″および約0.01°の精度まで知られている。ターゲット機器118、120、122、124がある位置で画像化されると、車輪126、128、130、132は別の位置に転がされ、新たな画像をとることができる。ターゲット機器118、120、122、124が2つの位置において画像化された場所を使用して、車輪126、128、130、132の実際の位置および配向、ならびに車輪軸を映像画像化システム102により計算することができる。2つの位置間の距離は変化するが、この距離は多くの場合、前後ともに約8インチである。
【0027】
図3aおよび3bは、この発明によって実行されるターゲット機器の例を例示する。図3aのターゲット機器20は、ベース21と、ベースから延びる第1のターゲット表面22および第2のターゲット表面23とを有する。図1に示される円のようなパターンがターゲット表面に提供される。ベース21は、測定が行なわれることになる、図2に例示されるターゲット本体134または装着装置138のような物体に装着するように形作られる。一実施例では、ターゲット本体134はベース21として働き、ターゲット表面はターゲット本体134に装着される。別の例として、装着装置138はターゲット機器のベースとして働き、ターゲット表面は装着装置に接続される。ターゲット表面22とターゲット表面23との間の角度はθである。ターゲット表面間の適切な角度θは、システムが使用されることになる環境において実験的に測定することができる。角度θは、環境および用いられる光学部品に依存して、典型的には170°またはそれ以下である。
【0028】
図3bに例示されるターゲット機器の別の実施例は26として示され、第1のターゲット表面27は第2のターゲット表面28に接続されている。図3aに例示されるターゲット機器とは違い、ターゲット表面27が位置する面はベース21に対して平行でない。ターゲット表面27と28との間の角度はθであり、図3aのθと同様、実験的に容易に決定することができる。
【0029】
図4aおよび4bは、この発明によって実行され、強い光源下で動作されるターゲット機器の一例を例示する。図4aでは、図3aで例示されるものと同様のターゲット機器20がある物体31の表面に装着される。ターゲット表面22および23は、図1に例示されるものと同様のパターンを有する。カメラ33はターゲット機器20から画像を捕捉するために使用される。ターゲット表面22および23上のパターンの画像は、それぞれ経路32および34を通してカメラ33により捕捉される。
【0030】
図4bは、この発明によって実行されるターゲット機器に対する強い光源の影響を示す。日光35と、ターゲット表面22に対して垂直なライン39との間の角度αが、経路32とライン39との間の角度βと等しくなるある特定の位置に太陽30が動くと、日光35はターゲット表面22によって反射され、カメラ33がターゲット表面22上のパターンから画像をそれにより捕捉するところの経路32に沿ってカメラ33に入る。この場合、日光35の反射はターゲット表面22から捕捉されるパターン画像に干渉する。
【0031】
しかしながら、ターゲット表面22と23とは平行でない面上に位置するため、日光35はターゲット表面23によって反射されず、よってターゲット表面23から経路34に沿って捕捉されるパターン画像に干渉しない。したがって、位置的なパラメータの計算は影響を受けない画像に基づいて行なうことができる。よって、照り返しからの干渉は排除される。
【0032】
別の例として、図5はこの発明によって実行されるある車輪アライメントシステムを示す。車輪アライメントが行なわれることとなる自動車20は、そのシャシの概略的な図示により示され、2つの前輪22Lおよび22R、ならびに2つの後輪24Lおよび24Rを含んで示される。自動車200は、点線で示される従来の車輪アライメント検査ベッド上に位置されて示される。システムは、図3aまたは3bに示されるものと同様のターゲット機器54を使用し、ターゲット表面22および23はそれに装着されている。
【0033】
カメラ30は、レンズと鏡との組合せを使用することにより、ターゲット機器54に交わる視線経路を形成する。カメラ30は、レンズ40を通る観察経路38に沿って、車輪22L、22R、24Lおよび24R上に装着された各ターゲット機器54のターゲット表面の1つと、ビームスプリッタ42および鏡46Lならびに46Rとの両方に同時に狙いをつける。鏡46Lおよび46Rは、各車輪の画像が別々の鏡によって捕捉されるように、異なる車輪に狙いをつける複数の鏡を含んでもよい。
【0034】
コンピュータ32はカメラ30に結合される。カメラ30によって捕捉される画像は、コンピュータ32によってアクセス可能な画像情報に変換される。位置的なパラメータの計算は、照り返しによって影響されない画像情報に基づいて行なわれる。一実施例によると、照り返しによって生じる画像情報はローパスフィルタ回路により除去することができる。
【0035】
コンピュータ32は、ある特定の角度から見られたターゲット表面上のパターンについての情報を記憶する。この情報を使用して、ターゲット表面および車輪の面の配向を計算することができる。一実施例では、ターゲット機器のベースに対して垂直なある角度から見られたパターンがコンピュータ32に記憶される。2つのターゲット表面間の角度、ターゲット機器の寸法およびターゲット表面とベースとの間の角度などのターゲット機器の構成に関する情報は、先に説明した実施例のようにコンピュータ32に事前に記憶することができるが、ターゲットの画像に基づいて物体の配向を判定するために行なわれる計算の詳細は引用される特許に示される。
【0036】
この発明はある例示的な実施例に関して説明されてきたが、この発明は開示された実施例に制限されるのではなく、反対に、上掲の特許請求の範囲の精神および範囲に含まれるさまざまな変更および均等の変形を含むように意図されていることが理解されるべきである。
【図面の簡単な説明】
【図1】図1は、車両の車輪上で位置判定のために使用することができるある典型的なターゲット機器の一例を例示する。
【図2】図2は、この発明を実行することができるある位置判定システムの一例を示す。
【図3a】図3aは、この発明によって実行されるターゲット機器の例の斜視図である。
【図3b】図3bは、この発明によって実行されるターゲット機器の例の斜視図である。
【図4a】図4aは、この発明によって実行され、強い光源下で動作されるあるターゲット機器の一例を例示する。
【図4b】図4bは、この発明によって実行され、強い光源下で動作されるあるターゲット機器の一例を例示する。
【図5】図5は、この発明によって実行されるある車輪アライメントシステムの一例を示す。
Claims (6)
- 画像化システムのためのある物体に装着するためのターゲット機器であって、
物体上に装着するように形作られたベースと、
ベースに接続された第1のターゲット表面と、
ベースに接続された第2のターゲット表面とを含み、
第1のターゲット表面および第2のターゲット表面が位置する面は互い平行でない、ターゲット機器。 - ある物体の位置パラメータを測定するための位置判定システムであって、
ターゲット機器を含み、これは、
物体に装着するように形作られたベースと、
ベースに接続された第1のターゲット表面と、
ベースに接続された第2のターゲット表面とを含み、
第1のターゲット表面および第2のターゲット表面が位置する面が互いに平行でなく、位置判定システムはさらに、
ターゲット機器と交わる視線経路を形成し、ターゲット機器の幾何学的な特徴を示す画像情報を生成するように形作られた画像感知機器と、
画像感知機器に結合するように構成され、画像情報に基づいて物体の配向を判定するためのデータ処理機器とを含む、位置判定システム。 - データ処理機器は、
データ処理ユニットと、
データ記憶機器と、
表示器と、
データ処理ユニット、表示器およびデータ記憶機器に結合されたバスとを含む、請求項2に記載のシステム。 - ある物体の位置的なパラメータを、物体に装着された第1および第2のターゲット表面を使用して判定するための方法であって、第1のターゲット表面および第2のターゲット表面が位置する面は互いに平行でなく、
ターゲットに交わる視線経路を形成するステップと、
ターゲット機器の画像を捕捉するステップと、
ターゲット機器上の照り返しの存在を判定するステップと、
照り返しによって影響されない画像に基づいて物体の位置的なパラメータを計算するステップとを含む、方法。 - 車両の車輪の位置的なパラメータを判定するための車輪アライメントシステムであって、
ターゲット機器を含み、これは、
車両に装着するように形作られたベースと、
ベースに接続された第1のターゲット表面と、
ベースに接続された第2のターゲット表面とを含み、
第1のターゲット表面および第2のターゲット表面が位置する面は互いに平行でなく、車輪アライメントシステムはさらに、
ターゲット機器に交わる視線経路を形成し、ターゲット機器の幾何学的な特徴を示す画像情報を生成するように形作られた画像感知機器と、
画像感知機器に結合するように構成され、画像情報に基づいて車両の車輪の配向パラメータを判定するためのデータ処理機器とを含む、車輪アライメントシステム。 - ターゲット機器は車両の車輪に装着される、請求項5に記載のシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US21439000P | 2000-06-28 | 2000-06-28 | |
| PCT/US2001/020368 WO2002001152A1 (en) | 2000-06-28 | 2001-06-27 | Glint-resistant position determination system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004502154A true JP2004502154A (ja) | 2004-01-22 |
Family
ID=22798915
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002506035A Pending JP2004502153A (ja) | 2000-06-28 | 2001-06-27 | 位置決定システムに用いるためのターゲットシステム |
| JP2002506039A Withdrawn JP2004502154A (ja) | 2000-06-28 | 2001-06-27 | 照り返しに耐性のある位置判定システム |
| JP2002506040A Expired - Lifetime JP4583707B2 (ja) | 2000-06-28 | 2001-06-28 | 車両車輪スクラブ半径を測定するための方法および装置 |
| JP2002506041A Withdrawn JP2004501830A (ja) | 2000-06-28 | 2001-06-28 | 車輪アライメントを行なうための方法およびシステム |
| JP2003194303A Pending JP2004004108A (ja) | 2000-06-28 | 2003-07-09 | 位置決定システムに用いるためのターゲットシステム |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002506035A Pending JP2004502153A (ja) | 2000-06-28 | 2001-06-27 | 位置決定システムに用いるためのターゲットシステム |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002506040A Expired - Lifetime JP4583707B2 (ja) | 2000-06-28 | 2001-06-28 | 車両車輪スクラブ半径を測定するための方法および装置 |
| JP2002506041A Withdrawn JP2004501830A (ja) | 2000-06-28 | 2001-06-28 | 車輪アライメントを行なうための方法およびシステム |
| JP2003194303A Pending JP2004004108A (ja) | 2000-06-28 | 2003-07-09 | 位置決定システムに用いるためのターゲットシステム |
Country Status (8)
| Country | Link |
|---|---|
| US (4) | US6560883B2 (ja) |
| EP (4) | EP1295086B1 (ja) |
| JP (5) | JP2004502153A (ja) |
| CN (4) | CN1250932C (ja) |
| AU (3) | AU2001273007A1 (ja) |
| DE (2) | DE60144184D1 (ja) |
| TW (5) | TWI247094B (ja) |
| WO (4) | WO2002001152A1 (ja) |
Families Citing this family (89)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE1013152A3 (nl) * | 1999-11-24 | 2001-10-02 | Krypton Electronic Eng Nv | Werkwijze voor het bepalen van het dynamisch gedrag van een voertuig op een testbank. |
| AUPR529901A0 (en) * | 2001-05-28 | 2001-06-21 | Lynx Engineering Consultants Pty Ltd | Automated wheel skid detector |
| US6661505B2 (en) * | 2001-06-28 | 2003-12-09 | Snap-On Technologies, Inc. | Method and system for measuring caster trail |
| US6912477B2 (en) * | 2002-02-12 | 2005-06-28 | Snap-On Incorporated | Method and apparatus for determining ride height of a vehicle |
| US7302093B2 (en) * | 2002-03-26 | 2007-11-27 | Hunter Engineering Company | Color vision vehicle wheel alignment system |
| EP1398610B1 (en) * | 2002-09-13 | 2005-05-25 | Snap-on Equipment Srl a unico socio. | Method and apparatus for determining geometrical data of a motor vehicle wheel mounted rotatably about an axis of rotation |
| US6871409B2 (en) | 2002-12-18 | 2005-03-29 | Snap-On Incorporated | Gradient calculating camera board |
| US7386590B2 (en) * | 2003-01-03 | 2008-06-10 | Microsoft Corporation | System and method for improved synchronization between a server and a client |
| WO2004111569A1 (en) * | 2003-06-11 | 2004-12-23 | Snap-On Incorporated | Wheel alignment with surface-oriented runout determination |
| ES2246447T3 (es) * | 2003-07-17 | 2006-02-16 | Axios 3D Services Gmbh | Localizador y sistema optico de medicion. |
| EP1649246A1 (en) * | 2003-07-31 | 2006-04-26 | Snap-on Incorporated | Two-wheel alignment adjustment method |
| WO2005012832A1 (en) * | 2003-07-31 | 2005-02-10 | Snap-On Incorporated | Vehicle wheel alignment adjustment method |
| US20050060899A1 (en) * | 2003-09-23 | 2005-03-24 | Snap-On Technologies, Inc. | Invisible target illuminators for 3D camera-based alignment systems |
| US7308971B2 (en) * | 2003-12-19 | 2007-12-18 | Hunter Engineering Company | Turn plate and slip plate centering and locking mechanism |
| GB0413827D0 (en) | 2004-06-21 | 2004-07-21 | Renishaw Plc | Scale reading apparatus |
| ITPD20040224A1 (it) * | 2004-09-07 | 2004-12-07 | Spanesi S P A | Attrezzatura per la determinazione dell'assetto delle ruote di un autoveicolo |
| US7328124B2 (en) * | 2004-10-07 | 2008-02-05 | Hunter Engineering Company | Apparatus and method for measuring and compensating steering-angle sensitive alignment measurements |
| US7307737B1 (en) * | 2004-10-08 | 2007-12-11 | Snap-On Incorporated | Three-dimensional (3D) measuring with multiple reference frames |
| GB0428165D0 (en) * | 2004-12-23 | 2005-01-26 | Renishaw Plc | Position measurement |
| US7143519B2 (en) * | 2004-12-30 | 2006-12-05 | Snap-On Incorporated | Alignment system with locking turntables and skid plates |
| US7788815B2 (en) | 2005-01-18 | 2010-09-07 | Wilkinson & Associates | Prism pole with direct readout |
| US7780070B2 (en) * | 2005-04-11 | 2010-08-24 | The Boeing Company | Method of manufacturing a product using scan targets |
| US20060282999A1 (en) * | 2005-06-20 | 2006-12-21 | Diptarka Majumdar | Electrodes, inner layers, capacitors and printed wiring boards and methods of making thereof - part II |
| US20070009136A1 (en) * | 2005-06-30 | 2007-01-11 | Ivan Pawlenko | Digital imaging for vehicular and other security applications |
| EP1845337B1 (en) * | 2006-04-10 | 2011-06-15 | Snap-on Equipment Srl a unico socio | Apparatus for contactless 3D wheel alignment, system and method therefor |
| US7755402B1 (en) | 2006-04-28 | 2010-07-13 | Nvidia | Calibration of separate delay effects for multiple data strobe signals |
| US7313869B1 (en) | 2006-07-18 | 2008-01-01 | Snap-On Incorporated | Vehicle wheel alignment system and methodology |
| US20080119978A1 (en) * | 2006-11-20 | 2008-05-22 | Hunter Engineering Company | Method and Apparatus For Wheel Assembly Force Moment Arm Measurement |
| US7698826B2 (en) * | 2007-02-12 | 2010-04-20 | Hubbs Machine & Manufacturing Co. | Refurbishable retro-reflective photogrammetric target |
| US7424387B1 (en) | 2007-04-18 | 2008-09-09 | Snap-On Incorporated | Method for use with an optical aligner system for positioning a fixture relative to a vehicle |
| US7913405B2 (en) * | 2007-05-30 | 2011-03-29 | Trimble Ab | Target for use in measuring and surveying applications |
| US7870677B2 (en) * | 2007-05-31 | 2011-01-18 | Snap-On Incorporated | Lightweight wheel clamp for vehicle wheel alignment system |
| US7640673B2 (en) * | 2007-08-01 | 2010-01-05 | Snap-On Incorporated | Calibration and operation of wheel alignment systems |
| US7855783B2 (en) * | 2007-09-18 | 2010-12-21 | Snap-On Incorporated | Integrated circuit image sensor for wheel alignment systems |
| DE102009007291A1 (de) | 2009-01-27 | 2010-07-29 | Aesculap Ag | Chirurgische Referenzierungseinheit, chirurgisches Instrument und chirurgisches Navigationssystem |
| WO2011075192A2 (en) * | 2009-12-18 | 2011-06-23 | Snap-On Incorporated | Lightweight wheel clamp for vehicle wheel alignment system |
| DE102010040655A1 (de) | 2010-09-13 | 2012-03-15 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Kalibrieren eines Referenzsystems zur Fahrzeugvermessung |
| FR2966586B1 (fr) * | 2010-10-25 | 2013-05-24 | Peugeot Citroen Automobiles Sa | Dispositif pour determiner les coordonnees de la position d'un point et son application a la determination de la position d'un mannequin a l'interieur d'un vehicule automobile |
| US8230609B1 (en) * | 2010-11-30 | 2012-07-31 | Cook-Sanders Associates, Inc. | Survey pole positioning system |
| CN102147227B (zh) * | 2011-01-04 | 2012-10-03 | 安徽福马车桥有限公司 | 汽车前束的测量方法 |
| CN103443580B (zh) * | 2011-03-29 | 2016-08-17 | 罗伯特·博世有限公司 | 用于校准一车辆测量用的参考系统的系统和方法 |
| CN102826073A (zh) * | 2011-06-16 | 2012-12-19 | 彭圣普 | 动态双轴转向汽车前轮滑移调整装置 |
| CN102384728B (zh) * | 2011-08-03 | 2014-07-09 | 桂林博达汽车科技有限公司 | 应用后倾角与外倾角改变量测量车辆最大转向角的方法 |
| US9330448B2 (en) | 2011-09-21 | 2016-05-03 | Toyota Motor Engineering & Manufacturing North America, Inc. | Adaptive feature recognition tool |
| DE102011084876A1 (de) * | 2011-10-20 | 2013-04-25 | Robert Bosch Gmbh | System und Verfahren zur Achsvermessung eines Kraftfahrzeugs |
| WO2013127410A1 (de) * | 2012-03-02 | 2013-09-06 | Pascal Munnix | Vorrichtung und verfahren zur bestimmung des fahrzustandes eines fahrzeugs |
| WO2013163643A1 (en) | 2012-04-27 | 2013-10-31 | Snap-On Incorporated | Improved method and apparatus for performing rolling runout compensation for vehicle wheel alignment |
| DE102012011518B3 (de) * | 2012-06-08 | 2013-10-17 | Trimble Jena Gmbh | Geodätisches ziel und positionsbestimmungssystem |
| US20140000516A1 (en) * | 2012-06-29 | 2014-01-02 | Toyota Motor Engineering & Manufacturing North America, Inc. | Digital point marking transfer |
| CN102735456A (zh) * | 2012-07-05 | 2012-10-17 | 烟台高易电子科技有限公司 | 小标靶3d汽车四轮定位仪 |
| CN102735457B (zh) * | 2012-07-06 | 2014-12-24 | 烟台高易电子科技有限公司 | 3d四轮定位仪及其测量方法 |
| DE102012215754A1 (de) * | 2012-09-05 | 2014-03-06 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Fahrzeugvermessung |
| US8825303B1 (en) * | 2013-03-28 | 2014-09-02 | Snap-On Incorporated | Wheel alignment apparatus and method for vehicles having electro-mechanical power steering |
| JP5923054B2 (ja) * | 2013-04-08 | 2016-05-24 | 株式会社神戸製鋼所 | 形状検査装置 |
| US9021872B2 (en) * | 2013-06-27 | 2015-05-05 | Motool | System for measuring suspension sag |
| US9986232B1 (en) | 2014-04-25 | 2018-05-29 | Hunter Engineering Company | Method for distance calibration of machine vision vehicle service system |
| US10539413B2 (en) * | 2014-12-17 | 2020-01-21 | Snap-On Incorporated | Live ride height measurement |
| KR102353126B1 (ko) * | 2015-01-07 | 2022-01-19 | 스냅-온 인코포레이티드 | 롤링 가상의 휠 스핀들 캘리브레이션 |
| CN104742968B (zh) * | 2015-02-09 | 2017-03-15 | 合肥工业大学 | 一种双前桥商用车前束与外倾角匹配方法 |
| DE102015203120B4 (de) * | 2015-02-20 | 2020-12-10 | Ford Global Technologies, Llc | Dynamische Anpassung von Spur und Sturz mittels einer piezoelektrischen Einrichtung |
| CN104713499B (zh) * | 2015-04-07 | 2017-05-17 | 深圳市龙牌科技有限公司 | 车桥定位仪 |
| EP3090907B1 (en) * | 2015-05-05 | 2020-08-12 | Volvo Car Corporation | Secondary steering system unit, secondary steering system, vehicle and a method for secondary steering |
| KR101611135B1 (ko) * | 2015-07-01 | 2016-04-08 | 기아자동차주식회사 | 휠 얼라이먼트 측정 시스템 및 측정 방법 |
| CN105091794A (zh) * | 2015-08-19 | 2015-11-25 | 深圳科澳汽车科技有限公司 | 一种检测车辆轮胎外倾角与前束角的装置及方法 |
| EP3332212B1 (en) | 2015-10-06 | 2020-02-19 | Snap-On Incorporated | Self-calibrating wheel aligner with improved portability |
| GB201517926D0 (en) | 2015-10-09 | 2015-11-25 | Wheelright Ltd | Tyre condition analysis |
| DE102016001592A1 (de) * | 2016-02-11 | 2017-08-17 | Audi Ag | Verfahren zur Beeinflussung der Fahrtrichtung von Kraftfahrzeugen |
| FR3056171B1 (fr) * | 2016-09-20 | 2020-05-08 | Renault S.A.S | Methode d'installation d'un referentiel geometrique sur un sol pour la calibration de composants electriques ou electroniques d'un vehicule automobile et un equipement adapte. |
| DE102017204853A1 (de) * | 2016-11-28 | 2018-05-30 | Hans-Jürgen Schulze | Mehrspuriges Kraftfahrzeug |
| CN108267104A (zh) * | 2018-01-22 | 2018-07-10 | 浙江大学 | 一种基于双目视觉的轴类零件半径尺寸测量方法 |
| CN108413855B (zh) * | 2018-02-24 | 2019-12-10 | 第一拖拉机股份有限公司 | 一种电子卡规的校准及评定方法 |
| DE102018202854B4 (de) * | 2018-02-26 | 2020-01-02 | Audi Ag | Verfahren zum Betrieb eines Bordnetzes eines Hybridkraftfahrzeugs und Hybridkraftfahrzeug |
| US11243074B2 (en) | 2018-04-30 | 2022-02-08 | BPG Sales and Technology Investments, LLC | Vehicle alignment and sensor calibration system |
| US11597091B2 (en) | 2018-04-30 | 2023-03-07 | BPG Sales and Technology Investments, LLC | Robotic target alignment for vehicle sensor calibration |
| US11781860B2 (en) | 2018-04-30 | 2023-10-10 | BPG Sales and Technology Investments, LLC | Mobile vehicular alignment for sensor calibration |
| US11624608B2 (en) | 2018-04-30 | 2023-04-11 | BPG Sales and Technology Investments, LLC | Vehicular alignment for sensor calibration |
| US11835646B2 (en) | 2018-04-30 | 2023-12-05 | BPG Sales and Technology Investments, LLC | Target alignment for vehicle sensor calibration |
| CN108917661B (zh) * | 2018-05-25 | 2020-10-09 | 深圳市沃特沃德股份有限公司 | 一种车轮定位的检测方法、系统及汽车 |
| JP7000254B2 (ja) * | 2018-06-01 | 2022-01-19 | トヨタ自動車株式会社 | ホイールアライメント調整システム |
| US11008014B2 (en) * | 2018-08-14 | 2021-05-18 | Ford Global Technologies, Llc | Methods and apparatus to determine vehicle weight information based on ride height |
| EP3850306A4 (en) | 2018-09-13 | 2022-09-21 | Snap-On Incorporated | AUTOMOTIVE ALIGNMENT DEVICE WITH ENHANCED ACCURACY AND CONTINUOUS POSITIONING USING DRIVE DIRECTION CALCULATION |
| CN111256636B (zh) * | 2018-11-30 | 2021-11-19 | 上海电气电站设备有限公司 | 一种叶片扭转量的测量方法 |
| CN110008823B (zh) * | 2019-02-19 | 2020-07-21 | 阿里巴巴集团控股有限公司 | 车辆定损方法和装置、电子设备 |
| TWI790411B (zh) | 2019-11-22 | 2023-01-21 | 財團法人工業技術研究院 | 轉向裝置及方法 |
| WO2021257515A1 (en) * | 2020-06-15 | 2021-12-23 | Snap-On Incorporated | Apparatus and method for calibrating and aligning automotive sensors |
| CN112798302A (zh) * | 2020-12-30 | 2021-05-14 | 湖北三江航天万山特种车辆有限公司 | 一种独立悬架转向轮前束调整与测量方法 |
| EP4275012A1 (en) * | 2021-01-11 | 2023-11-15 | BPG Sales and Technology Investments, LLC | Wheel alignment measurement system and method |
| CN115452422A (zh) * | 2022-08-01 | 2022-12-09 | 中国第一汽车股份有限公司 | 一种考虑胎面磨损的轮胎滚动半径和负荷半径的试验方法 |
| CN117565975B (zh) * | 2024-01-17 | 2024-04-16 | 中国第一汽车股份有限公司 | 车辆后倾角的调整方法、系统、电子设备及存储介质 |
Family Cites Families (60)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR971205A (fr) | 1938-11-14 | 1951-01-15 | Franco Belge Du Caoutchouc Mou | Procédé pour la fabrication du caoutchouc cellulaire à cellules étanches |
| US3187440A (en) | 1961-08-18 | 1965-06-08 | Merrill | Dynamic wheel alignment testing apparatus |
| US3330044A (en) * | 1965-05-11 | 1967-07-11 | Bear Mfg Co | Attaching means for wheel gauges and the like |
| US3643337A (en) | 1968-08-05 | 1972-02-22 | Roy E Dick | Automobile front end alignment equipment |
| US4110913A (en) | 1971-12-06 | 1978-09-05 | Dick Roy E | Automobile front end alignment equipment |
| US3953134A (en) * | 1974-09-23 | 1976-04-27 | Ammco Tools, Inc. | Automotive wheel alignment instrument |
| DE2650577A1 (de) | 1976-11-04 | 1978-05-11 | Rohe Gmbh A | Vorrichtung zum vermessen des radeinschlagwinkels von lenkraedern |
| US4249824A (en) * | 1978-06-08 | 1981-02-10 | Fmc Corporation | Apparatus for measuring wheel alignment of motor vehicles |
| US4176463A (en) * | 1978-06-14 | 1979-12-04 | Ringle Gerald D | Wheel alignment gauge assembly and adapter therefor |
| US4303338A (en) * | 1979-09-04 | 1981-12-01 | Ammco Tools, Inc. | Wheel alignment method and apparatus |
| US4466196A (en) * | 1982-02-17 | 1984-08-21 | Woodruff James L | Laser alignment system for vehicles |
| US4479382A (en) * | 1982-04-05 | 1984-10-30 | The Goodyear Tire & Rubber Company | System for testing a tire to avoid a torque steer effect |
| US4643578A (en) * | 1985-03-04 | 1987-02-17 | Robotic Vision Systems, Inc. | Arrangement for scanned 3-D measurement |
| GB2180117B (en) * | 1985-09-05 | 1989-09-06 | Ferranti Plc | Three-dimensional position measuring apparatus |
| FR2709557B1 (fr) * | 1986-02-19 | 1995-12-01 | Sagem | Dispositif optique de mesure à distance des variations d'orientation d'un objet. |
| SE453779B (sv) * | 1986-07-07 | 1988-02-29 | Samefa Ab | Metpunktsavkennare for ett lengdmetningsdon |
| US4726122A (en) * | 1986-11-03 | 1988-02-23 | Nicator Ab | Wheel alignment apparatus for vehicles |
| US5024001A (en) * | 1988-10-07 | 1991-06-18 | Balco, Incorporated | Wheel alignment rim clamp claw |
| US4977524A (en) * | 1989-01-03 | 1990-12-11 | Hunter Engineering Company | Electronic measuring gauge and apparatus for accurate vehicle stance diagnosis and guidance in effecting wheel alignment |
| US5029397A (en) | 1989-02-21 | 1991-07-09 | Global Laser Systems Inc. | Method of measuring a vehicular frame to determine alignment |
| US5014227A (en) * | 1989-07-17 | 1991-05-07 | Bear Automotive Service Equipment Company | Caster and steering axis inclination measurement technique |
| JP2588982B2 (ja) * | 1990-02-13 | 1997-03-12 | 本田技研工業株式会社 | 車輪検査方法及び装置 |
| FR2663733B2 (fr) * | 1990-03-19 | 1994-07-01 | Canovas Gines | Dispositif de controle de l'usure et pression des pneus et de la geometrie des trains de pneus. |
| US5218556A (en) * | 1990-12-24 | 1993-06-08 | Fmc Corporation | Steering pivot axis orientation measurement apparatus and method |
| GB2258315B (en) | 1991-08-01 | 1994-09-28 | Churchill V L Ltd | Wheel alignment measurement system |
| US5165177A (en) | 1991-09-17 | 1992-11-24 | Bear Automotive Service Equipment Company | SAI and caster compensation for live caster and live camber readings |
| US5257458A (en) * | 1991-10-02 | 1993-11-02 | Arthur Koerner | Method and apparatus for determining caster and steering axis inclination angles |
| NO174025C (no) * | 1991-10-11 | 1994-03-02 | Metronor Sa | System for punktvis maaling av romlige koordinater |
| US5208646A (en) * | 1991-12-20 | 1993-05-04 | Fmc Corporation | Wheel alignment system |
| US5724743A (en) * | 1992-09-04 | 1998-03-10 | Snap-On Technologies, Inc. | Method and apparatus for determining the alignment of motor vehicle wheels |
| DE69330466T2 (de) | 1992-09-04 | 2002-04-11 | Snap On Tech Inc | Verfahren und vorrichtung zur bestimmung der ausrichtung von kraftfahrzeugrädern |
| US5809658A (en) * | 1993-09-29 | 1998-09-22 | Snap-On Technologies, Inc. | Method and apparatus for calibrating cameras used in the alignment of motor vehicle wheels |
| US5586062A (en) | 1993-10-04 | 1996-12-17 | Hunter Engineering Company | Vehicle wheel alignment utilizing wheel offset and body center line |
| US5519488A (en) * | 1994-02-01 | 1996-05-21 | Fmc Corporation | Eight sensor wheel aligner |
| US5553389A (en) * | 1994-05-05 | 1996-09-10 | Hunter Engineering Company | Appartus and method for adjusting vehicle toe alignment angles |
| US5515613A (en) | 1994-11-30 | 1996-05-14 | Hinson; Virgil H. | Apparatus for and method of measuring vehicle reference points |
| US5488472A (en) | 1995-01-10 | 1996-01-30 | Hunter Engineering Company | Apparatus for determining vehicle wheel alignment positions and orientations |
| JPH08261747A (ja) * | 1995-03-23 | 1996-10-11 | Nissan Motor Co Ltd | ホイールアライメント測定装置 |
| FR2735861B1 (fr) * | 1995-06-23 | 1997-08-01 | Muller Bem | Procede et dispositif de mesure de la geometrie de trains roulants de vehicules |
| US5969246A (en) * | 1995-10-10 | 1999-10-19 | Snap-On Technologies, Inc. | Apparatus and method for determining axial stability |
| NO301999B1 (no) * | 1995-10-12 | 1998-01-05 | Metronor As | Kombinasjon av laser tracker og kamerabasert koordinatmåling |
| JPH09133510A (ja) * | 1995-11-07 | 1997-05-20 | Sanyo Mach Works Ltd | ホイールアライメント測定方法 |
| US5724128A (en) * | 1995-12-28 | 1998-03-03 | Hunter Engineering Company | Apparatus and method for determining vehicle wheel alignment measurements from three dimensional wheel positions and orientations |
| US5675515A (en) | 1995-12-28 | 1997-10-07 | Hunter Engineering Company | Apparatus and method for determining vehicle wheel alignment measurements from three dimensional wheel positions and orientations |
| US6298284B1 (en) * | 1995-12-28 | 2001-10-02 | Hunter Engineering Company | Apparatus and method with improved field of view for determining vehicle wheel alignment measurements from three dimensional wheel positions and orientations |
| FR2748321B1 (fr) * | 1996-05-06 | 1998-07-17 | Muller Bem | Dispositif pour le controle geometrique de vehicule |
| JPH1073422A (ja) * | 1996-08-29 | 1998-03-17 | Saginomiya Seisakusho Inc | キャスタ角測定装置、ホイールアラインメント測定装置、キャスタ角測定方法及びホイールアラインメント測定方法 |
| US5812256A (en) * | 1996-08-13 | 1998-09-22 | Merilab, Inc. | Vision system for wheel alignment |
| DE19634505C1 (de) * | 1996-08-27 | 1997-11-20 | Daimler Benz Ag | Verfahren zur Erfassung der Achsgeometrie bei Kraftfahrzeugen mit Einzelradaufhängungen |
| DE69735273T2 (de) * | 1996-09-16 | 2006-08-10 | Snap-On Inc., Pleasant Prairie | Messeinrichtung für fahrzeuge |
| US6070332A (en) | 1996-10-18 | 2000-06-06 | Aim Automotive Integrated Manufacturing, Inc. | Wheel alignment apparatus |
| DE19748239A1 (de) | 1996-10-31 | 1998-05-20 | Fori Automation Inc | Verfahren und Vorrichtung zur berührungslosen Bestimmung von Sturz und Vorlauf eines Fahrzeugrads |
| BE1011121A3 (nl) * | 1997-04-21 | 1999-05-04 | Krypton Electronic Eng Nv | Inrichting en werkwijze voor het bepalen van de positie van een punt. |
| US5832617A (en) * | 1997-05-01 | 1998-11-10 | Snap-On Technologies, Inc. | Easy toe adjustment |
| US5875418A (en) * | 1997-06-04 | 1999-02-23 | Snap-On Technologies, Inc. | Compensation for undesired angle deviations arising during vehicle wheel alignment operations |
| BR9810997A (pt) | 1997-07-10 | 2000-08-08 | Snap On Tech Inc | Aparelho e método para ajustar a altura da câmera de alinhamento de rodas |
| US6164405A (en) * | 1997-11-14 | 2000-12-26 | Toyota Jidosha Kabushiki Kaisha | Steering gear box mounting structure |
| US5886782A (en) * | 1998-01-16 | 1999-03-23 | Hedgecock, Jr.; Wesley Javan | Vehicle rear end alignment device |
| US6226879B1 (en) * | 1999-04-23 | 2001-05-08 | Saturn Machine & Welding Co., Inc. | Method of and means for establishing vehicle datum |
| US6237234B1 (en) * | 1999-09-28 | 2001-05-29 | Snap-On Technologies, Inc. | Method and apparatus for measuring vehicle wheel roll radius |
-
2001
- 2001-06-26 US US09/888,391 patent/US6560883B2/en not_active Expired - Lifetime
- 2001-06-27 WO PCT/US2001/020368 patent/WO2002001152A1/en active Application Filing
- 2001-06-27 JP JP2002506035A patent/JP2004502153A/ja active Pending
- 2001-06-27 EP EP01950517A patent/EP1295086B1/en not_active Expired - Lifetime
- 2001-06-27 AU AU2001273007A patent/AU2001273007A1/en not_active Abandoned
- 2001-06-27 CN CN01811872.0A patent/CN1250932C/zh not_active Expired - Lifetime
- 2001-06-27 EP EP01952230A patent/EP1295083A2/en not_active Withdrawn
- 2001-06-27 DE DE60144184T patent/DE60144184D1/de not_active Expired - Lifetime
- 2001-06-27 CN CNB018112625A patent/CN100447527C/zh not_active Expired - Lifetime
- 2001-06-27 JP JP2002506039A patent/JP2004502154A/ja not_active Withdrawn
- 2001-06-27 WO PCT/US2001/020367 patent/WO2002001148A2/en active Application Filing
- 2001-06-28 JP JP2002506040A patent/JP4583707B2/ja not_active Expired - Lifetime
- 2001-06-28 EP EP01948763A patent/EP1295085B1/en not_active Expired - Lifetime
- 2001-06-28 WO PCT/US2001/020454 patent/WO2002001153A1/en active Application Filing
- 2001-06-28 US US09/892,906 patent/US6796043B2/en not_active Expired - Lifetime
- 2001-06-28 TW TW090115743A patent/TWI247094B/zh not_active IP Right Cessation
- 2001-06-28 JP JP2002506041A patent/JP2004501830A/ja not_active Withdrawn
- 2001-06-28 AU AU2001270199A patent/AU2001270199A1/en not_active Abandoned
- 2001-06-28 WO PCT/US2001/020456 patent/WO2002001154A1/en active Application Filing
- 2001-06-28 CN CN01811873.9A patent/CN1250937C/zh not_active Expired - Lifetime
- 2001-06-28 DE DE60142289T patent/DE60142289D1/de not_active Expired - Lifetime
- 2001-06-28 TW TW090115784A patent/TW493060B/zh not_active IP Right Cessation
- 2001-06-28 TW TW090115755A patent/TW494225B/zh not_active IP Right Cessation
- 2001-06-28 US US09/892,722 patent/US6532062B2/en not_active Expired - Lifetime
- 2001-06-28 TW TW090115775A patent/TW475054B/zh not_active IP Right Cessation
- 2001-06-28 AU AU2001270197A patent/AU2001270197A1/en not_active Abandoned
- 2001-06-28 TW TW090115782A patent/TWI225921B/zh not_active IP Right Cessation
- 2001-06-28 EP EP01948761.0A patent/EP1295084B1/en not_active Expired - Lifetime
- 2001-06-28 CN CN01811876.3A patent/CN1255665C/zh not_active Expired - Lifetime
-
2002
- 2002-10-28 US US10/281,107 patent/US6658751B2/en not_active Expired - Lifetime
-
2003
- 2003-07-09 JP JP2003194303A patent/JP2004004108A/ja active Pending
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2004502154A (ja) | 照り返しに耐性のある位置判定システム | |
| US6526665B2 (en) | Glint-resistant position determination system | |
| EP3243037B1 (en) | Rolling virtual wheel spindle calibration | |
| US7336350B2 (en) | Wheel alignment apparatus and method utilizing three-dimensional imaging | |
| US6237234B1 (en) | Method and apparatus for measuring vehicle wheel roll radius | |
| US6915228B2 (en) | Method and device for calibrating an image sensor system in a motor vehicle | |
| JP4248264B2 (ja) | 車両の特徴的姿勢パラメータの測定装置及びシステム | |
| JP4803449B2 (ja) | 車載カメラの校正装置、校正方法、並びにこの校正方法を用いた車両の生産方法 | |
| US7424387B1 (en) | Method for use with an optical aligner system for positioning a fixture relative to a vehicle | |
| US8638452B2 (en) | Measuring head for a chassis measuring system, chassis measuring system and method for determining the position parameters of measuring heads of a chassis measuring system | |
| US8363979B2 (en) | Method for ascertaining the axis of rotation of a vehicle wheel | |
| JP4843190B2 (ja) | 画像センサシステムのキャリブレーション方法および装置 | |
| JPH08501155A (ja) | モータ車の車輪のアライメントを決定するための方法および装置 | |
| JP4803450B2 (ja) | 車載カメラの校正装置及び当該装置を用いた車両の生産方法 | |
| US7164472B2 (en) | Common reference target machine vision wheel alignment system | |
| EP2153168B1 (en) | Method and apparatus for wheel alignment | |
| US20200318946A1 (en) | Three-dimensional measuring system | |
| JP2003508743A (ja) | 車両のヘッドライト又は距離センサのための調節機器を備えた調節装置 | |
| US6823246B2 (en) | Measuring wheel base parallelism with a position determination system | |
| JP7448484B2 (ja) | カメラ内部パラメータのオンライン評価 | |
| KR101894204B1 (ko) | 실시간 컨테이너 트럭 모니터링 방법 및 시스템 | |
| CN109029438B (zh) | 一种在有限区域内的车辆定位方法 | |
| CN220603332U (zh) | 漆面缺陷检测装置 | |
| US20230365148A1 (en) | Method for aligning a vehicle to an adas calibration target and an adas calibration system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20080902 |