CN1250932C - 和定位系统一起使用的标的系统 - Google Patents
和定位系统一起使用的标的系统 Download PDFInfo
- Publication number
- CN1250932C CN1250932C CN01811872.0A CN01811872A CN1250932C CN 1250932 C CN1250932 C CN 1250932C CN 01811872 A CN01811872 A CN 01811872A CN 1250932 C CN1250932 C CN 1250932C
- Authority
- CN
- China
- Prior art keywords
- target
- point
- target body
- vehicle
- positioning system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/0025—Measuring of vehicle parts
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/002—Measuring arrangements characterised by the use of optical techniques for measuring two or more coordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/26—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes
- G01B11/275—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes for testing wheel alignment
- G01B11/2755—Measuring arrangements characterised by the use of optical techniques for measuring angles or tapers; for testing the alignment of axes for testing wheel alignment using photoelectric detection means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/24—Measuring arrangements characterised by the use of mechanical techniques for measuring angles or tapers; for testing the alignment of axes
- G01B5/255—Measuring arrangements characterised by the use of mechanical techniques for measuring angles or tapers; for testing the alignment of axes for testing wheel alignment
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/12—Method or fixture for calibrating the wheel aligner
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/14—One or more cameras or other optical devices capable of acquiring a two-dimensional image
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/14—One or more cameras or other optical devices capable of acquiring a two-dimensional image
- G01B2210/143—One or more cameras on each side of a vehicle in the main embodiment
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/16—Active or passive device attached to the chassis of a vehicle
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/20—Vehicle in a state of translatory motion
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/26—Algorithms, instructions, databases, computerized methods and graphical user interfaces employed by a user in conjunction with the wheel aligner
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/30—Reference markings, reflector, scale or other passive device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/10—Wheel alignment
- G01B2210/30—Reference markings, reflector, scale or other passive device
- G01B2210/303—Reference markings, reflector, scale or other passive device fixed to the ground or to the measuring station
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Body Structure For Vehicles (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Vehicle Body Suspensions (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
一种用于确定车辆上位置方位的标的系统,包括一个标的体、一个或多个标的元件、一个触发器和一个点确定器。标的元件设置在标的体上并可由定位系统探测出。触发器设置在标的体上并远离定位系统。触发器通过选择地改变由一个或多个标的元件的定位系统进行的探测来控制定位系统。点确定器从标的体延伸,并包括一个位于末端的点。所述点能邻近车辆上的所述位置设置并位于距标的体的已知位置处。定位系统在探测设置在标的体上的标的元件之后确定标的体的位置。本发明还披露了使用该标的系统的方法。
Description
发明领域
本发明通常涉及机动车辆对准,更具体地说,本发明涉及一种使用定位系统来获得与车辆上位置有关的位置信息的标的系统。
背景技术
机动车对准系统对于确保车上车轮的对准处于机动车制造商所提供的技术标准之内是重要的。如果车轮没有对准,就会有过度或不均匀的磨损。另外,如果车轮没有正确地对准,车的性能、尤其是操纵性和稳定性就会受到不好的影响。此处使用的术语“轮子”或“车轮”指的是在机动车上安装的轮胎和轮子的组件。这种组件一般包括安装在金属轮或“轮圈”上的传统轮胎。
可以采用多种方式来对准机动车上的轮子。例如操作者或对准技师可以采用视觉成像系统,例如采用光传感设备如摄影机的计算机辅助的三维(3D)机器影像系统,来确定各种物体的位置。尽管这种视觉成像系统通常用于进行对准,但是这些系统也可以用于获得机动车的其它位置和角度取向信息。在Jackson等人的题为“用于确定机动车轮对准的方法和设备”的US5,724,743(1998年3月10日)和Jackson等人的题为“用于确定机动车轮对准的方法和设备”的US5,535,522(1996年7月16日)中披露了这种设备和方法的示例,这两篇专利在此引入作为参考。这些专利中披露的设备有时称为“3D对准仪”或“对准仪”,以下称为视觉成像系统。此处使用的术语“定位系统”是指对准系统,例如视觉成像系统,以及与该对准系统结合使用以获得机动车的位置和角度取向信息的其它元件。
上述定位系统提供例如车轮旋转中心的信息,这有助于车轮的对准。其它位置信息,例如乘坐高度、车轮前束的曲线、倾斜角和车身相对于车轮的角关系也有助于技师进行车轮以及车身对准。但是,当前的定位系统不能获得这种信息。因此,需要一种改进的定位系统,其能获得关于车辆的其它位置信息,例如乘坐高度、车轮前束的曲线、倾斜角和车身相对于车轮的角关系。
发明概述
这些和其它需要可以通过一种标的系统实现,在确定车辆位置的方位的过程中,该标的系统可以和定位系统一起使用。所述标的系统包括一个标的体、一个或多个标的元件和一个点确定器。标的元件设置在标的体上并可由定位系统探测出。点确定器从标的体延伸,并包括一个能在邻近车辆上的位置设置的点。定位系统在探测设置在标的体上的标的元件之后确定标的体的位置。点确定器上的点也可以位于距标的体的已知位置处。
一方面,所述点位于点确定器的末端。另外,该点位于点确定器末端处圆锥形突起的顶点处。而且,点确定器可以包括一个或多个接头,它们可以使该点相对标的体位于不同的位置,例如三个位置中的一个。一个或多个接头各自容许该点相对于标的体在一个或多个轴线上转动。另外,各接头可以包括一个锁定装置,用以选择地防止或容许该点相对标的体运动。
另一方面,标的系统可以包括一个触发器,用于启动通过定位系统进行的标的系统的探测。触发器可以设置在标的体上并远离定位系统。触发器通过选择地改变由一个或多个标的元件的定位系统进行的探测来控制定位系统。例如,触发器可以在两个位置之间移动。在第一位置中,触发器对定位系统隐藏一个或多个标的元件,在第二位置,触发器将一个或多个标的元件暴露给定位系统。
又一方面,标的元件沿标的体设置在一条直线上,而且该直线基本上和标的体的纵向轴线平行。另外,标的系统可以包括一个连接装置,用以稳定标的体相对于车辆的位置和用于相对于要被确定的车辆上的位置稳定点确定器上的点。连接装置可以包括一个连接臂和一个可拆卸地连接到车辆上的连接器。连接臂通过第一枢轴连接到标的体,通过第二枢轴连接到连接器。
或者,连接装置、例如一种用于连接到车辆支撑件上的装置可以包括点确定器连接到其上的接收器和与车辆相连的连接器。接收器,例如一部分点确定器可以被插入的圆柱形凹槽,可以包括一个参考部件如平面,其限定了连接装置相对于点确定器上点的位置。连接器还可以限定将要被确定的车辆上位置和参考部件之间的位置关系。参考部件和接收器的组合能防止点确定器在三个轴线上相对于连接装置运动。
另一方面,提供了一种使用定位系统获得车辆上位置的方位的方法。该方法包括用标的系统指示所述位置,用定位系统对标的系统进行成像以获得所述方位。用于指示位置的标的系统包括一个标的体、多个标的元件和一个从标的体延伸的点确定器,其中标的元件位于标的体上并可由定位系统探测出来。点确定器包括一个能邻近车辆上的位置设置的点。定位系统计算标的体的位置并从标的体的位置内插所述点的位置。
所述点可相对于标的体定位在三个点位置中的一个上。假如这样的话,标的系统被成像而且对各点位置内插所述点的位置。然后将该点对于各点位置的内插位置与车辆上位置的预算位置进行比较。通过选择最接近预算位置的内插位置来得到车辆上位置的方位。
标的系统可以引起定位系统对标的系统进行成像。这样做,触发器可以选择地改变由一个或多个标的元件的定位系统进行的探测。例如,触发器可以选择地对定位系统隐藏或暴露给定位系统一个或多个标的元件。
校准标的系统包括确定所述点相对于标的体的位置关系。例如,通过将标的系统的标的体设置在至少三个不同的位置,并同时将点确定器的点邻近将要确定的车辆上的位置固定,可以校准标的系统。然后确定标的体在至少三个不同位置的各位置处的方位,而且从标的体的所述至少三个不同位置内插点确定器的所述点。或者,通过将标的系统的标的体设置在至少三个不同的位置处,同时使点确定器保持在校准固定件内,可以校准标的系统。然后确定标的体在至少三个不同位置的各位置处的方位,而且从标的体的所述至少三个不同位置内插点确定器的所述点。
一方面,提供了一种使用定位系统测量车身倾斜角度的方法。该方法包括使用一个或多个标的系统指示车辆上的车辆限定点,对所述一个或多个标的系统成像以获得各车辆限定点的位置;使用各车辆限定点的位置定义一车身倾斜线;定义一参考线;并计算车身倾斜线和参考线之间的车身倾斜角。然后将计算的车身倾斜角和车身倾斜角的规定范围进行比较。
参考线可以沿着车辆支撑在其上的表面限定的平面或者沿着车轮旋转中心限定的平面。使用标的指示车轮的旋转中心,所述标的位于车轮上并由定位系统成像。
车辆限定点可以包括位于车辆各侧上的点,所述侧是由居中地通过车辆长度方向的垂直平面剖分的。另外,至少一组车辆限定点的车辆限定点可以从车辆两侧共有的同一位置处选择。
在另一方面,提供了一种使用定位系统测量车辆上垂直距离的方法。该方法包括用标的系统指示车辆上的参考点;对标的系统进行成像以获得参考点的位置;限定一参考平面;计算参考平面和参考点之间的垂直距离。然后将计算的垂直距离和垂直距离如乘坐高度的规定范围进行比较。
参考平面可以通过使用至少三个不共线的点由车辆支撑在其上的表面限定,使用标的系统指示所述点。参考平面还可以由车轮旋转中心限定。使用标的指示车轮的旋转中心,所述标的位于车轮上并由定位系统成像。
在又一方面,提供了一种使用定位系统获得车轮前束曲线的方法。该方法包括用标的系统指示车辆上的参考点;对标的系统进行成像以获得参考点的位置;限定一个参考平面;获得车轮的第一前束角;计算参考平面和参考点之间的第一垂直距离,用第一车轮前束角和第一垂直距离定义第一数据点;改变第一垂直距离为第二垂直距离;获得车轮的第二前束角,用第二前束角和第二垂直距离定义第二数据点;从至少两个数据点内插车轮前束曲线。通过使用定位系统对位于车轮上的标的进行成像以获得第二参考点。然后将计算的车轮前束曲线与车轮前束曲线的规定范围进行比较。
参考平面可以由车辆位于其上的平面限定或者由车轮旋转中心限定。使用标的指示车轮的旋转中心,所述标的位于车轮上并通过定位系统成像。
第二垂直距离可以通过相对于参考平面垂直地移动参考点而得到,接着再对标的系统进行成像以获得第二参考点。然后计算参考平面和第二参考点之间的第二垂直距离。
对于给定的垂直距离,可以从车轮前束曲线外推车轮前束角,而且然后可以将给定垂直距离处的外推车轮前束角与车轮前束角的规定范围进行比较。另外,对于给定的车轮前束角,可以从车轮前束曲线外推垂直距离,而且可以将给定车轮前束角的外推垂直距离与垂直距离的规定范围进行比较。
又一方面,提供了一种使用定位系统测量车身相对于车轮的对准的方法。该方法包括用一个标的系统指示车辆上的若干车身限定点;对标的系统进行成像以获得车身限定点的位置;根据车身限定点的位置计算车身中心线;获得车轮中心线;计算车身中心线和车轮中心线之间的车身对准角。然后将计算的车身对准角和车身对准角的规定范围进行比较。
获得车轮中心线包括用标的指示车轮的旋转中心,所述标的位于车轮上,并用定位系统对标的进行成像以获得车轮的位置。另外,可以计算在两个前轮的车轮限定点之间延伸的前轮轨迹的前中心点,以及在两个后轮的车轮限定点之间延伸的后轮轨迹的后中心点。然后将车轮中心线定义为包括前中心点和后中心点的线。
若干车身限定点可以包括两组每组包括两个的车身限定点,各组车身限定点包括车辆各侧上的车身限定点,所述侧由居中地通过车辆长度方向的垂直平面剖分。另外,各组车身限定点的车身限定点可以从车辆两侧共有的同一位置处选择。另外,所述两组车身限定点可以包括一个基本邻近车辆前面的前组和一个基本邻近车辆后面的第二组。
获得车身中心线还包括计算在前组的车身限定点之间延伸的前车身线的前车身中心点,以及计算在后组的车身限定点之间延伸的后车身线的后车身中心点。然后将车身中心线定义为包括前车身中心点和后车身中心点的线。
从下面的详细描述,对于本领域的技术人员而言本发明的其它优点将变得显然,其中仅通过解释说明实现本发明的最佳方式示出并描述了本发明的示例性实施例。但应该认识到,本发明可以有其它的和不同的实施例,而且在不偏离本发明范围的前提下可以进行各种变型。因此,附图和说明被认为实质上是示例性的,而不是限制性的。
附图的简要描述
参考附图,其中具有相同附图标记的元件在本文中表示类似的元件,其中;
图1是定位系统和视觉成像系统的透视图;
图2是标的系统的侧视图;
图3A和3B是标的系统上点确定器的局部侧视图,其中点确定器具有一个或多个接头;
图4A和4B是用于标的系统的触发器的局部侧视图,其中触发器位于两个不同的位置;
图5是三个标的系统的透视图,各标的系统被固定在一个原始位置P0处,各标的系统的标的体被定向在相对于原始位置P0的不同空间位置处;
图6A和6B分别是用于校准标的系统的固定件的透视和剖视侧视图;
图7A和7B是和标的系统一起使用的连接装置的侧剖图;
图8是另一种标的系统的侧视图;
图9A和9B分别是正被用于获得车辆倾斜角的图2标的系统的前视图和示意图;
图10A和10B分别是正被用于获得车辆乘坐高度的图2和图8标的系统的前视图和透视图;
图11是正被用于获得车轮前束曲线的图8标的系统的前视图;
图12是和垂直距离有关的车轮前束角的数据点的曲线图;
图13是通过结合标的系统的定位系统获得的点的示意图,它们被用来获得车身相对于车轮的角关系。
优选实施例的详细描述
本发明的定位系统能够获得与车辆有关的位置信息,例如乘坐高度、车轮前束的曲线、倾斜角和车身相对于车轮的角关系。通过提供一个容许定位系统获得车辆上各位置的方位的标的系统来部分实现这一点。不像以前的标的,它们仅限于获得车轮的方位,当前的标的系统能被用来获得车辆上任何位置的方位。一旦获得这些方位,定位系统和标的系统一起能获得车辆的位置信息,例如乘坐高度、车轮前束的曲线、倾斜角和车身相对于车轮的角关系。
图1表示定位系统的示例。定位系统100包括一个视觉成像系统102,系统102具有安装在梁114上的彼此隔开固定的一对摄影机110,112。梁114的长度足够用来分别将摄影机110,112设置在车辆侧面的外侧,以利用定位系统100进行成像。而且梁114将摄影机110,112设置在车间地面116上方足够高处,以确保在车辆左侧的两个标的118,120都落入左侧摄影机110的视野内,而车辆右侧的两个标的122,124都落入右侧摄影机112的视野内。
标的118,120,122,124安装在机动车的每个车轮126,128,130,132上,每个标的118,120,122,124包括一个标的体134、若干标的元件136和一个连接装置138。连接装置138将标的118,120,122,124连接至车轮126,128,130,132。连接装置的一个示例被披露在Borner等人的题为“车轮对准轮圈夹钳”的US5,024,001(1991年6月18日)中,该专利在此引入作为参考。标的元件136设置在标的体134上。可用于本发明的标的体134和标的元件136的示例如美国专利US5,724,743所述。
在操作中,一旦定位系统100已经用校准标的(未示出)进行了校准,如引用的参考文献中所述,就可以将车辆驶到机架133上,而且如果需要,将车辆升高到适当的修理高度。将标的118,120,122,124连接至车轮轮圈上之后,调整其取向,以便标的体134上的标的元件136面向各个摄影机110,112。然后可以将车型和生产年份以及其它标识参数,如车辆VIN号码、执照号码、车主姓名等输入视觉成像系统102。
一般知道,标的118,120,122,124相对于连接有该标的车轮126,128,130,132的轮圈的方位具有约0.01″-0.01°的精度。应该理解定位系统100不限于这些精度。当标的118,120,122,124在一个位置成像之后,将车轮126,128,130,132旋转至另一个位置并进行新的成像。利用标的118,120,122,124在两个位置的成像方位,可以通过视觉成像系统102计算车轮126,128,130,132和轮轴的实际位置和取向。尽管两个位置之间的距离可以变化,但是该距离通常大致是8英寸。
如图2所示,和定位系统一起使用的标的系统200包括一个标的体210、若干标的元件212和一个点确定器214。标的元件212设置在标的体210上,而且例如通过使用定位系统的视觉成像系统(最好见图1)来探测标的元件212,可以确定标的体210空间的角取向和位置。点确定器214从标的体210延伸,而且该点确定器214包括一个点P,该点可以相对标的体210具有已知的角取向和方位。标的系统200还可以包括一个设置在标的体210上的把手208,以便于用户握住标的体210。已经参照图1描述了标的体210、标的元件212和定位系统的例子。
在操作中,调整标的系统200的方向,以便点确定器214上的点P邻近要被测量的位置P1设置。对于要被测量的特定位置,标的系统200是不受限制的,要被测量的位置的例子包括车轮接触地面的地方、支撑塔架的顶部、钥匙孔、以及轮辋凹槽顶部。定位系统对标的体210上的标的元件212成像后,确定标的体210的位置和角取向。当点P位于距离标的体210的已知角取向和位置处时,然后也可以通过定位系统确定点P的位置。另外,在进行初始位置P1的测量后,可以使用相同的技术或前面论述的和定位系统相关的其它技术来进行一个或多个其它位置P2,P3,P4,…Pn的测量,然后通过定位系统确定这些位置P1,P2,P3,P4,…Pn彼此间的各种关系。
可以在沿点确定器214的任何地方设置点P。但是,点P最好被设置在点确定器214的一位置处,以便它可以紧邻要测量的位置P1设置。由于定位系统确定了点P在点确定器214上的方位,所以可以从点P的方位推出要测量的位置P1的方位。照此,有利的是在点P测量期间,点P和位置P1之间的距离比用于确定位置P1的容许测量误差小。取决于一些因素、如确定位置P1的临界性,用于确定位置P1的容许测量误差可以变化。
在标的系统200的当前方面中,点P位于从点确定器214的末端延伸的突起216的顶点处。通过将点P设置在点确定器214的末端并通过使用突起216,点P可以被有利地基本设置于要测量的位置P1的邻近处。另外,如果突起216是圆锥形的,那么可以将圆锥形突起216的顶点弄圆,这更便于放置点确定器214而且还使尖锐顶部引起的伤害减至最小。
点确定器214不限于特定的材料。但是,一方面,点确定器214由一种尺寸固定的材料形成,以便操作期间,点P相对于标的体210的实际位置和角取向不会从已知的位置和角取向变化。否则,如果点P相对于标的体210的实际和已知的位置和角取向不相关的话,计算位置P1的计算方位就不会与测量位置P1的实际方位相关。
点确定器214也不限于特定的形状。但是,一方面,点确定器214的形状能容许点确定器214以及因此的点P容易接近要测量的位置P1。另一方面,点确定器214为杆状,具有大的长度/横截面积的比率,长的长度有利地容许点P远离标的体210设置。另外,小的横截面积容许点P被引入窄的地方。
在标的系统200的一方面中,将点确定器214形成为一个整体元件,以保持点确定器214的尺寸固定。但是,如图3A和3B所示,点确定器214可以包括一个或多个接头218。接头218容许点确定器214的点P相对于标的体210位于不同的位置和角取向处。例如,接头218有利地容许点确定器214和点P接近要测量的位置P1,但用不能变形的点确定器214通常不能接近所述位置P1,这是由于标的系统200的形状阻止了点P接近要测量的位置P1。另外,接头218还能用在下述情况中,其中尽管标的系统200的点P能接近要测量的位置P1,但标的体210被隐藏起来,不能被定位系统探测到。由于具有接头218,点P能接近要测量的位置P1,而且标的体210也可以被定位系统看到。
在另一方面,如图3A所示,接头218容许点P沿一轴线转动并转动到三个位置中的一个:标准位置L、上位置LU、和下位置LL。上位置LU和下位置LL分别可以相对于通过点确定器214纵向轴线的一轴线取向+/-90°。但是,标的系统200不限于这种方式。例如,如图3B所示,在标的系统200中可以使用一个或多个接头218。另外,各接头218能给点P提供一个或多个相对标的体210转动的轴线。另外,点P可以相对于标的体210旋转并位于无限多的位置和角取向处。接头218还容许点确定器214的长度延长。照此,可用接头218来改变点P距标的体210的距离,但不改变角取向。
在使用接头218的地方,接头218可以包括一个锁定装置234,该锁定装置选择地防止或容许点P相对于标的体210的运动和/或转动。点P的方位可以通过定位系统由标的体210的位置和角取向确定,这是因为点P位于距离标的体210的已知位置和角取向处。照此,一旦已经确定了点P相对于标的体210的位置和角取向,任何由接头218引起的随后运动都会使接头的实际位置不可知。照此,当启动时,锁定装置234防止接头218容许点P相对于标的体210的运动和/或转动。这种锁定装置234对于本领域的技术人员是已知的,而且标的系统200不限制锁定装置234的特定形式。
由于接头218容许点P相对于标的体210运动,所以应该确定点P相对于标的体210的位置和角取向。但是,如果一个或多个接头218容许点P相对于标的体210被定向在点P的一定数量的位置处,就能用定位系统确定点P的实际位置。如果点P只处于已知数量的位置处,定位系统就能计算各可能位置并将计算的位置与点P的预期位置进行比较。定位系统然后可以确定最接近计算位置的预期位置为点P的实际位置。例如,通过使用容许点P转动到三个位置L,LU,LL中的一个位置处的接头218,如上面参照图3A进行的描述,定位系统能确定点P的三个可能位置L,LU,LL中各个位置的预期位置。通过选择最接近地落入其中希望设有测量位置P1的可能或预期位置中的预期位置,定位系统然后能确定点P的准确位置。或者,可以通过系统用户将点P相对于标的体210的准确位置输入定位系统。
当确定点P的位置时,一个问题是标的系统200频繁地运动并使点P从一个位置移动到下一个位置。在选定的位置中,需要确定点P的位置,在其它位置中,不需要测量点P的位置。一方面,标的系统200识别将要对点P进行测量的位置,以便在进一步的计算中可以使用用于测量的位置信息。
一方面,只有在点P的位置稳定一段预定的时间如20秒时,定位系统才会进行读数,所述读数用于以后的计算。但是,当例如点P稳定预定的时间,但点P位于不需要测量的位置时,该方法会遇到困难。
另一方面,可以给标的系统200提供一触发器220,用以开始定位系统进行测量或停止测量的操作。用于开始或停止电子装置的触发器220对于本领域的技术人员是已知的,而且标的系统200不限制触发器220的特定形式。例如,触发器220可以是位于定位系统的视觉成像系统上的按钮。
但是,在当前方面中,触发器220位于标的系统200上。在标的系统200上设置触发器220的优点是在标的系统200和点P已经被标的系统200的用户正确地定位后可以立即进行测量。另外,尽管可以在标的体210上任何位置处设置标的220,但最好将触发器220邻近把手208设置,以容许用户经把手208握住标的体210而便于致动触发器220。尽管触发器220可以被电连接到定位系统上,但在标的系统200的一方面中,触发器220可以遥控定位系统。对于本领域的技术人员而言,遥控触发器220是已知的,而且标的系统200不限制遥控触发器220的特定类型。例如,通过按压按钮222,遥控触发器220可以发出信号,该信号被定位系统的视觉成像系统接收,然后定位系统开始读数。
另一种遥控触发器220通过选择地改变由定位系统进行的标的体210上一个或多个标的元件212的探测来操纵定位系统,而且任何能选择地改变一个或多个标的元件212的视觉成像系统的成像的触发器220都可以用在本发明中。例如,触发器220能通过改变标的元件212的特定特征,例如阴影、颜色和/或尺寸来进行操作。定位系统然后将标的元件212的这种特定特征的改变转化为一种开始或停止测量的信号。
在另一个例子中,如图4B所示,触发器220的罩224隐蔽至少一个标的元件212;而且因此,所述至少一个标的元件212不能被定位系统成像。另外,通过压下杆226,如图4B所示,罩224暴露所述至少一个标的元件212。然后可以根据所述至少一个标的元件212是否可见来预知点P位置的测量。在当前方面中,当所述至少一个特定的标的元件212可见时开始读数,尽管所述的至少一个特定标的元件212不可见时也会交替地读数。
确定点P相对于标的体210的位置和角取向容许被测量位置P1的位置从点P的位置推出。定位系统通过首先确定标的体210的位置获得点P的位置,然后用点P距标的体210的已知位置和角取向来确定点P的实际位置。因此,即使点P被准确地邻近要测量的位置P1设置,而且定位系统对标的体210的位置进行了准确的测量,如果定位系统使用的点P与标的体210的关系不正确的话,仍会将位置误差带入最终的测量结果。
标的系统200不限制确定点P与标的体210关系的特定方法。例如可以如此制造标的系统200,以便在标的体210和点P之间具有已知的角和位置关系。无论已知的关系对各标的系统200是不同或相同的,都可以将该关系输入定位系统以与其一起使用。
尽管可以和标的系统200一起使用,但前述方法的问题是点P和标的体210之间的关系会随时间改变。例如,在使用过程中点确定器214可能被弯曲,而且这会引起点P和标的体210之间的关系改变。另外,操作温度的不同,如冬天和夏天之间,会引起标的系统200内的材料膨胀和收缩。因此,需要一种定期地确定点P和标的体210之间关系的方法。
图5中示意地示出了根据本发明的确定点P和标的体210之间关系的方法。该方法包括获得标的体210在三个或多个位置M1,M2和M3处的位置和角取向,其中点P被固定在一个原始位置P0,标的体210绕原始位置P0转动。没有任何其它的关于点P和标的体210之间关系的信息,定位系统能使用标的体210相对于三个位置M1,M2和M3的位置和角取向确定点P的位置,而且可以使用本领域技术人员已知的数学方法获得点P和标的体210之间的关系。另一方面,也可以在其它位置M4…Mn处进行一个或多个测量,而且这些额外的测量可以用来确保在起初三个位置M1,M2和M3处的测量精度。
另外,应该注意获得超过三个的其它位置的方法不限于这种特定的应用。在使用标的系统200的任何类型的测量期间都可以使用获得四个或多个位置的方法。如上所述,超过三个的额外测量在确定点P的位置中可用来确保起初三个测量的精度。
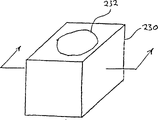
上述方法包括将点P固定在一个原始位置P0处,同时移动标的体210并在数个位置处测量,而且能在将点P固定在一个位置的同时容许标的体210移动的任何方法或设备都可以和标的系统200一起使用。在当前方面中,如图6A和6B所示,提供一个校准固定件230,以将点确定器214上的点P固定在一个位置处。所述校准固定件230包括一个圆锥形槽232,可以将点确定器214的圆锥形突起216插入该槽中。圆锥形槽232的圆锥角比圆锥形突起216的圆锥角大,这容许点确定器214设置在圆锥形槽232范围内的不同角度处,但仍使圆锥形突起216的顶点邻近圆锥形槽232的顶点。这样,标的系统200的点P被固定在一个原始点P0处,而且标的体210可定位在不同的位置处。
在标的系统200的另一方面中,不需要在确定位置P1之前预知点P相对于标的体210的位置和角取向。如上所述,关于校准标的系统200,通过将点P固定在要测量的位置P1处并获得标的体210在三个或多个位置M1,M2和M3处的位置和角取向,可以确定点P相对于标的体210的位置和角取向。从该信息,可以确定点P相对于标的体210的位置和角取向,而且这可以用来推出要测量的位置P1的方位。因此,该方法通过在三个或多个位置M1,M2和M3处对标的体210进行测量来确定要测量的各位置P1的方位。在这样操作的过程中,该方法在每次确定位置P1的方位时有利地校准了标的系统200。
标的系统200还可以和连接装置匹配。所述连接装置用于以稳定的定位方式将点P和标的体210分别相对于被确定的位置P1和定位系统定位。通过这样操作,操作者能将标的系统200准确地定位以在特定位置P1处进行测量,然后操作者能离开标的系统去进行其它工作,例如操纵定位系统。
标的系统200不限制连接装置250的特定形式。例如,连接装置250可以是支撑在地面上的可调固定件,其固定标的系统200并将标的系统200定位在邻近要确定的位置P1处。连接装置250的另一个例子是一种连接到车辆上的固定件。该固定件可以被连接到车辆上邻近要测量的特定位置处,而且标的系统200上的点P还可以邻近要确定的特定位置P1设置。
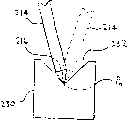
图7A和7B中示出了连接装置250的一个例子。该连接装置250包括一个将连接装置250连接到车辆上一部件处的连接器252。连接装置250不限于连接器252连接到所述部件上的方式。但是,连接器252最好以这样一种方式连接到部件上,以便容许连接器252限定一连接装置250相对于所述部件的固定位置。
连接装置250还可以包括一个接收器256,标的系统200的其它部分如标的体(未示出)和点确定器214连接到接收器256上。接收器256还可以包括一个参考部件258,当和点确定器214上的点P一起使用时,该部件限定了连接装置250相对于点P的位置,并因此限定了连接装置250相对于标的体的位置。连接器252和参考部件258彼此具有已知的位置关系。这样,还可以确定点P和标的体与连接器252连接的部件之间的位置关系。
连接装置250不限制标的系统200的其它部分连接到其上的接收器256的特定形式。例如,接收器256可以是连接到点确定器214上的锁定机构。另外,例如,如图7A所示,接收器256能限定一个比点确定器214的柱状形状稍大的圆柱形凹槽。使用中,点确定器214滑动到接收器256中,而且接收器256防止点确定器214沿两个轴线移动。
连接装置250还不限制参考部件258的特定形式,其中参考部件258限定了连接装置250相对于点P和标的体的位置关系。例如,参考部件258可以限定一个比点确定器214的圆锥形突起216的圆锥形状稍大的圆锥形槽。另外,例如如图7A所示,参考部件258可以是平面的,从而点确定器214上的点P压靠参考部件258并防止点确定器214沿一轴线移动。另外,当平面的参考部件258和具有接收部分的圆柱状接收器256结合时,如上所述,可以防止点确定器214沿三个轴线的运动,而且本领域技术人员知道,防止三个轴线上的运动足以精确并可靠地设置固定件。因此,可相对于连接装置250精确并可靠地设置点确定器214和点P。
连接装置250不限制它可以连接到其上的车辆上的具体部件。例如,连接装置250可以连接到轮辋凹槽顶部、门侧柱、门和用千斤顶顶起的地方。另外,如图7A和7B所示,连接器252可以将连接装置250连接到车辆的支撑塔架254上。
许多支撑塔架254包括一个突起部分,例如位于支撑塔架254顶部的销或滑脂枪喷嘴,或如图所示,一个螺母260和螺栓262组件。如图7A所示,连接器252可以在螺栓262上方滑动,或如图7B所示,连接器可以直接连接到螺栓260上,例如使用磁性连接器252。但是,应该注意,连接器252不限制它连接到支撑塔架254上的具体方式,只要能在连接器252和支撑塔架254之间限定稳定的位置关系就可以。
图8中示出了另一种标的系统300。和前面论述的标的系统200一样,标的系统300包括一个标的体310、若干标的元件312和一个点确定器314。标的系统还可以包括一个连接装置316,用以稳定标的体310相对于车辆302的位置。标的元件312设置在标的体310上,而且通过使用定位系统来给标的元件312成像,可以确定在标的体310空间中的角取向和位置。点确定器314从标的体310延伸,而且该点确定器314包括一个点P,该点可以相对标的体310具有已知的角取向和方位。已经参照图1描述了标的体310、标的元件312和定位系统的例子。
在标的系统300的一方面中,标的元件312沿一直线L设置,尽管标的系统300不限于这种方式。直线L还可以和标的体310的纵向轴线平行。通过沿直线L设置标的元件312,定位系统可以准确地确定直线L,读出两个或多个标的元件312。
操作中,点P的位置可以由定位系统解释。这样做时,从定位系统的摄影机画一条通过点P的直线。尽管定位系统能确定点P到摄影机的距离,但可以使用其它点来更准确地确定该距离。为了更准确地确定该距离,可以确定一个通过空间两点并垂直于基本平面的参考平面。例如,可以使用位于车轮上的标的确定这两点(最好见图11)。对于更高的精确度,定位系统然后确定从摄影机到所述参考平面和直线相交点的距离。通过知道标的系统300到参考平面的距离,可以精确地确定从摄影机到点P的距离。
连接装置316在现有技术中是已知的,而且标的系统300不限制特定的类型。但是,在当前方面中,连接装置316包括一个通过第一枢轴320在一端连接到标的体310上的连接臂318,枢轴320能使连接臂318相对于标的体310转动。另外,在另一端,连接臂318可以通过第二枢轴324连接到连接器322,该枢轴324能使连接臂318相对于连接器322转动。连接器322还可以包括一个或多个吸盘326,它容许连接器可拆下地连接到车辆302上。操作中,连接装置316可以有利地根据不同的车辆外形进行调节,这是因为第一和第二枢轴320,324容许连接臂316和连接器322两者相对于标的体310再定位。
示例1
图9A和9B中示出了一个示例的标的系统400。在此方面中,标的系统400用于确定车辆410的车身倾斜角θBT。车身倾斜角被定义为参考直线或平面PLCRT,PLG与限定车辆410的车身的直线或平面PLV之间的角度差。尽管标的系统400不受限于特定的参考直线或平面,但参考直线或平面可以是平面PLG或平面PLCRT,其中平面PLG由支撑车辆的表面(或地面)限定,平面PLCRT由车轮412的旋转中心限定。
限定车辆410车身的直线或平面PLV不受限于特定的直线或平面。但是有利地,所述直线或平面包括位于车辆410各侧上的车辆限定点PV,这由居中通过车辆410长度方向的垂直平面剖分。另外,当车辆410一侧基本上和另一侧相同时,可以从车辆410两侧共有的相同位置选择至少一组车辆限定点PV。这样,可以更准确地表述车身倾斜。另外,通过增大各车辆限定点PV之间的距离,可以更准确地表述车辆410的车身。
如图9B所示,车身倾斜线PLV由两个车辆限定点PV1,PV2限定,它们对应于车辆410的保险杠414上的同一位置。车身倾斜平面PLV例如,将需要至少一个额外的要限定的车辆限定点,而且该额外的车辆限定点(未示出)例如可以在后保险杠上获得。
操作中,首先使用定位系统确定参考平面或直线PLG或PLCRT和车身倾斜平面或直线PLV。通过一起使用标的系统400和定位系统获得两个和多个地面限定点PG1,PG2的位置,可以得到和地面相应的平面或直线PLG。定位系统然后使用地面限定点PG1,PG2的位置来限定参考平面或直线PLG。
尽管未示出,通过一起使用标的系统400和定位系统来获得两个或多个车轮限定点PW1,PW2的位置,可以得到车轮的参考平面或直线PLCRT。或者,使用专门用于限定轮胎旋转中心的标的(最好见图10B以及参照图1的描述)可以获得车轮限定点PW1,PW2。定位系统然后使用车轮限定点PW1,PW2的位置来限定车轮412的参考平面PLCRT。此处所用的“车轮限定点”是车轮上限定好的点。例如,车轮限定点可以是车轮轴线通过轮缘平面的点。
通过一起使用标的系统400和定位系统来获得两个或多个车辆限定点PV1,PV2的位置,可以得到车身倾斜的平面或直线PLV。定位系统然后使用车辆限定点PV1,PV2的位置来限定车身倾斜的平面或直线PLV。
在限定了参考平面或直线PLG或PLCRT和车身倾斜平面或直线PLV之后,定位系统使用本领域技术人员熟知的数学方法计算车身倾斜角θBT。对于普通车辆410,所需的车身倾斜角θBT为0°,或者同样地,需要参考平面或直线PLG或PLCRT平行于车身倾斜平面或直线PLV。但是,特殊的车辆410可以具有规定的范围,在车身需要调整之前,车身倾斜角θBT可以落在该范围中。
一方面,定位系统将计算的车身倾斜角θBT和车身倾斜角θBT的规定范围进行比较,并且在车身倾斜角θBT超过规定范围时会提醒技师。另外,定位系统可以将特定车辆的车身倾斜角θBT的规定范围存储起来,以便技师不必输入该范围,而仅给定位系统指出被测量车辆的类型即可。
示例2
图10A和10B中示出了另一个示例的标的系统500。在这方面中,使用标的系统500,505来确定参考平面到车辆510上特定点的垂直距离。要被测量的特定垂直距离的一个例子是乘坐高度,尽管使用该方法还可以进行其它测量。乘坐高度被定义为车辆510上一点距参考平面,例如支撑车辆510的平面PLG的垂直距离。该平面PLG,例如可以是支撑车辆510的地面或机架。
当对准车辆500的车轮530时,乘坐高度尤其重要。在进行车轮530的对准之前,通常需要测量和调整乘坐高度,以使其位于继续对准过程之前的规定公差内。尽管乘坐高度和规定公差通过由车辆制造商限定,但在这方面不限制确定乘坐高度的方法。
如图10A所示,一个标的系统505,例如参照图8描述的标的系统和定位系统一起使用来获得参考点PRH的位置,这会用在确定车辆200的乘坐高度中。一方面,参考点PRH位于轮辋凹槽上,尽管不限制参考点PRH的位置。例如,特定的制造商可以选择从另一个参考点测量乘坐高度,而且还可以使用标的系统505获得该参考点。
操作中,使用定位系统来确定参考平面PLG。通过一起使用标的系统500和定位系统获得两个和多个地面限定点PG1,PG2,PG3的位置,可以得到参考平面PLG。正如本领域技术人员熟知的,至少需要三个不共线的点来确定一个平面。这样,通过获得平面PLG上至少三个不共线的点(PG1,PG2,PG3)来确定平面PLG。定位系统然后使用地面限定点PG1,PG2,PG3的位置来限定参考平面PLG。
另一方面,通过测量邻近车轮530的三个不共线的点(PG1,PG2,PG3)来确定平面PLG,其中在车轮530处将要测量乘坐高度。该表面,例如支撑车辆510的机架550,可以不足够平以提供乘坐高度的精确测量。这样,平面PLG,例如由邻近三个单独车轮530的点限定,可以不精确地限定支撑车轮530的表面。但是通过限制紧邻特定车轮530的位置的要测量乘坐高度的三个测量位置,可以获得更精确的乘坐高度测量。
参考平面PLG不限于支撑车辆510的平面PLG。可以使用其它可能的参考平面,例如由车轮530的旋转中心限定的平面PLCRT。尽管没有参照例1说明,但通过一起使用标的系统500和定位系统获得三个或多个车轮限定点,可以得到车轮的平面PLCRT。或者,可以使用图10B所示并参照图1描述的标的获得车轮限定点。定位系统然后使用车轮限定点的位置来限定车轮的参考平面PLCRT。
通过从另一平面外推参考平面PLG的位置可以确定参考平面PLG。例如,如图10B所示,可以使用定位系统540来确定由车轮530的旋转中心限定的平面PLCRT。由于假定此平面PLCRT和参考平面PLG之间的垂直距离是已知的,所以可以外推平面PLG的位置,其中所述距离为车轮530的半径。另一方面,通过测量从平面PLCRT到用于乘坐高度的参考点PRH的垂直距离可以确定乘坐高度,而不用外推平面PLCRT和平面PLG之间的垂直距离,其中平面PLCRT由车轮230的旋转中心限定。
在已经限定参考点PRH和参考平面PLG或PLCRT之后,定位系统540通过计算从参考平面PLG或PLCRT到参考点PRH之间的垂直距离来计算乘坐高度。对于普通车辆510,所需的乘坐高度可以是规定的范围。因此,一方面,定位系统将计算的乘坐高度和乘坐高度的规定范围进行比较。另外,定位系统可以将特定车辆的乘坐高度的规定范围存储起来,以便以便技师不必输入该范围,而仅给定位系统指出被测量车辆的类型即可。
示例3
图11示出了标的系统的另一个例子。在此方面中,关于车轮630离开参考点PH或平面的垂直距离,可以获得车轮630的车轮前束曲线。正如本领域技术人员熟知的,车轮前束是车轮630绕通过车轮630中心的垂直轴线的向内或向外角转动。另外,正如本领域技术人员熟知的,车轮630的车轮前束(或车轮前束角α)根据车辆610上点PH离开参考平面的垂直距离而变化,所述参考平面如车轮630的旋转中心所限定的平面PLCRT。可以以和确定乘坐高度的方式相同的方式确定所述垂直距离,示例2中描述了确定乘坐高度的方式。
当升高或降低车辆610时,会改变所述垂直距离,支撑车轮630的悬架的几何形状也改变,而且这种几何形状的改变会改变车轮前束。车轮前束曲线是车轮630的车轮前束角α相对于点PH离开参考平面的垂直距离的曲线图。可以分别或同时获得车轮前束角α和/或各车轮630的车轮前束曲线。
如图11所示,一起使用标的615和定位系统可以获得车轮限定点PW和车轮630的角取向或前束角α。这些标的615,例如可以和图10B及参照图1描述的一样。标的系统605,例如图8所示并参照该图描述的标的系统,和定位系统一起使用以获得参考点PH的位置,该位置可以用来确定所述垂直距离。尽管不必要,在一方面中,标的系统605靠近车轮630设置,例如如图所示设置在轮辋凹槽上,或者设置在车辆610的发动机罩上。如果标的系统605距离定位系统的距离和标的615距离定位系统的距离近似相同,那么定位系统可以确定到标的系统605的距离。有利的是,定位系统然后可以使用该距离来确定参考点PH的相对位移,而不需要测量从定位系统到参考点PH的距离。
操作中,一起使用标的系统605和定位系统可以确定参考点PH,而且用在确定车轮前束曲线中的垂直距离是从车轮旋转参考平面PLCRT(平面PLCRT最好见图10B)的中心到参考点PH的垂直距离。或者,使用三个或多个参考点PH1,PH1…PHn可以限定一参考平面,而且用在确定车轮前束曲线中的垂直距离是从该参考平面到车轮限定点PW的垂直距离。应该注意,可以使用任何参考点或平面,只要它们在车辆610移动时相对于车辆610是静止的就可以。
另外,对于不同的垂直距离可以获得各车轮630的前束角α。此信息通过相对于车轮630垂直移动车辆610而获得,同时得到车轮前束角α和垂直距离,而且对于这种计算,任何相对于车轮630垂直移动车辆610的方式都可以接受。例如,可以使用升降机620来将车辆610升高到设定的距离。或者,可以将附加的重量施加到车辆610上,而且该附加重量将使车辆610移动更接近地面600,而车轮630相对于地面600将保持静止。
使用上述方法计算车轮前束角α相对于垂直距离的两个或多个数据点D1,D2…DN,定位系统可以内插出一条车轮前束曲线。如图12所示,根据数据点D1,D2…DN,可以使用任何从数据点内插曲线的方法。应该注意超过两个的额外数量的数据点增加了计算的车轮前束曲线和实际的车轮前束曲线的相关性。另外,如果车辆610可以相对于车轮630垂直移动一精确的距离,那么定位系统只需要计算车轮前束角α而不需计算垂直距离,而且定位系统可以获得此距离,以便将该距离和计算的车轮前束角α进行比较。
在已经根据数据点D1,D2…DN内插出车轮前束曲线后,定位系统能从车轮前束曲线外推出一个或多个数据点D1,以获得针对给定车轮前束角α1的垂直距离H1,或者获得针对给定垂直距离H1的车轮前束角α1。另外,定位系统可以将计算的车轮前束曲线和车轮前束曲线的规定范围进行比较,或者将特定的车轮前束角α或垂直距离H与车轮前束角α或垂直距离H的规定范围进行比较。所述规定范围,例如可以由车辆610的制造商获得,尽管定位系统不受限于这种方式。另外,计算车轮前束曲线需要车辆610位于一定的基本重量下,以校准计算的车轮前束曲线;但是定位系统不受限于这种方式。
然后技师可以使用与实际车轮前束曲线相对应的计算前束曲线和前束曲线的规定范围的比较结果来对准和/或调整车辆610、车轮、和/或车辆悬架,以便使实际的车轮前束曲线位于前束曲线的规定范围内。另外,定位系统可以将特定车辆的车轮前束曲线的规定范围存储起来,以便技师不必输入该范围,而仅给定位系统指出被测量车辆的类型即可。
示例4
图11示意地示出了标的系统的另一个例子。在这方面中,标的系统用于获得车身相对于车轮对准的测量。正如本领域技术人员熟知的,车身可以被设置在车架上,或者车身和车架可以被组合为熟知的单片式汽车车身。尽管,例如车架可以和车轮准确地对准,但车身可以未在车架上对准,而且因此车身会指向不同于车轮的方向。车身和车轮的未对准会降低车辆的空气动力效率;而且因此,提供了一种使用标的系统和定位系统测量这种未对准情况的方法。
操作中,使用标的系统和定位系统获得各车轮726,728,730,732的车轮限定点PW1,PW2,PW3,PW4,而且任何能获得车轮限定点PW1,PW2,PW3,PW4的标的都是可以接受的。但是,一方面,标的可以是图11中所示并参照图1描述的标的。或者,标的可以是图2中所示并参照该图描述的标的系统200。
在获得车轮限定点PW1,PW2,PW3,PW4之后,定位系统计算前轮轨迹750的中心点750a和后轮轨迹752的中心点752a。前轮轨迹750在两个前轮726,730的车轮限定点PW1、PW3之间延伸。另外,后轮轨迹752在两个后轮728,732的车轮限定点PW2、PW4之间延伸。一旦已经确定了车轮轨迹750,752的中心点750a,752a,就可以在两个中心点750a,752a之间限定一条车轮中心线760。车轮中心线760然后可以用于车轮的测量。
使用通过标的系统和定位系统得到的车身限定点PB限定车辆的车身,而且任何能获得车身限定点PB的标的系统都是可以接受的。一方面,标的系统可以是图2中所示并参照该图描述的标的系统200。尽管不限制车身限定点PB的特定数量,但在当前方面中,使用两组每组两个的车身限定点PB1,PB2,PB3,PB4,总共至少四个点,来限定车辆的车身。用在此处的“车身限定点”是在车身上限定的点。例如,车身限定点可以是用于门把手的钥匙孔或用千斤顶顶起的地方。
尽管不受限于这种方式,但每组车身限定点最好可以包括位于车辆410各侧上的车身限定点PB,所述侧是由居中地通过车辆长度方向的垂直平面剖分的。另外,由于车辆通常是左右两侧对称的,所以各组车身限定点最好从车辆两侧共有的同一位置处选择。另外,最好选择所述两组点,使一组位于车辆前面,另一组位于车辆后面。通过增加各车身限定点PB1,PB2,PB3,PB4之间的距离,可以更准确地代表车身。
在已经获得车身限定点PB1,PB2,PB3,PB4之后,定位系统计算前车身线770的前车身中心点770a和后车身线772的后车身中心点772a。前车身线770在前组点的车身限定点PB1,PB3之间延伸。另外,后车身线772在后组点的车身限定点PB2,PB4之间延伸。一旦已经获得车身线770,772的中心点770a,772a,就可以在两个中心点770a,772a之间限定一条车身中心线780。然后将车身中心线780用作车身的测量。
一旦已经限定了车身中心线780和车轮中心线760,就可以在这些直线之间获得一个角θB,该角位于车身和车轮之间未对准的指示情况范围内。另外,一旦已经获得该车身对准角θB,定位系统就可以将该车身对准角θB和需要的范围进行比较,然后该比较结果可以用作技师对准时的帮助。另外,定位系统可以将特定车辆的车身对准角θB的规定范围存储起来,以便技师不必输入该范围,而仅给定位系统指出被测量车辆的类型即可。
本发明可以使用传统的材料、方法和设备来实现。因此这些材料、设备和方法的细节在此不详细说明。在前面的描述中,已经提出了多种具体的细节,例如特定材料、结构、化学制品和工艺等,为的是充分理解本发明。但是应当认识到,不借助于前述具体的细节,也可以实现本发明。在其它的例子中,没有详细描述已知的工艺结构,为的是不会不必要地混淆本发明。
在本发明的公开中只显示了本发明的示例性方面以及它多种可能性的一些实例。应当理解,本发明能够在各种其它组合和环境中使用,并能够在如下所述的本发明的范围内进行改变和改动。
Claims (46)
1.一种构造为用于确定车辆上位置的方位的定位系统,包括:
一个视觉成像系统;和
一个标的系统,包括:
一个标的体;
一个或多个标的元件,所述标的元件设置在标的体上并可由视觉成像系统探测出;和
一个从标的体延伸的点确定器,其包括一个能邻近车辆上的所述位置设置的点,
其中:当将标的体设置在至少三个不同的位置处,同时将点确定器的点邻近车辆上的所述位置固定时,视觉成像系统在探测所述一个或多个标的元件之后确定标的体的位置。
2.如权利要求1的定位系统,其中:
所述标的系统还包括一个设置在标的体上并远离视觉成像系统的触发器,该触发器构造为用于选择地改变视觉成像系统进行的一个或多个标的元件的探测;并且
能邻近车辆上的所述位置设定的点设置在点确定器末端位于距标的体的已知位置处。
3.如权利要求1的定位系统,其中标的系统包括:一个连接装置,用以稳定标的体相对于车辆的位置和用于相对于要被确定的车辆上的位置稳定点确定器上的所述点,该连接装置包括一个连接臂和一个可拆卸地连接到车辆上的连接器,连接臂通过第一枢轴连接到标的体,通过第二枢轴连接到连接器。
4.根据权利要求1所述的定位系统,其特征在于:点确定器上的所述点位于距标的体的已知位置处。
5.根据权利要求1所述的定位系统,其特征在于:所述点位于点确定器的末端处。
6.根据权利要求5所述的定位系统,其特征在于:所述点位于点确定器末端处圆锥形突起的顶点处。
7.根据权利要求1所述的定位系统,其特征在于:点确定器包括一个或多个接头,它们使所述点相对标的体位于不同的位置。
8.根据权利要求7所述的定位系统,其特征在于:一个或多个接头各自容许所述点相对于标的体在一个或多个轴线上转动。
9.根据权利要求7所述的系统,其特征在于:点确定器包括一个接头,它使所述点相对标的体绕一轴线转动。
10.根据权利要求7所述的定位系统,其特征在于:各接头包括一个锁定装置,用以选择地防止或容许所述点相对标的体运动。
11.根据权利要求1所述的定位系统,其特征在于:还包括一个触发器,用于启动通过视觉成像系统进行的标的系统的探测。
12.根据权利要求11所述的定位系统,其特征在于:触发器设置在标的体上并远离视觉成像系统。
13.根据权利要求11所述的定位系统,其特征在于:触发器通过选择地改变视觉成像系统进行的一个或多个标的元件的探测来控制定位系统。
14.根据权利要求13所述的定位系统,其特征在于:触发器可以在第一和第二位置之间移动,在第一位置中,触发器对视觉成像系统隐藏一个或多个标的元件,在第二位置中,触发器将一个或多个标的元件暴露给视觉成像系统。
15.根据权利要求1所述的定位系统,其特征在于:标的元件沿标的体设置在一条直线上。
16.根据权利要求15所述的定位系统,其特征在于:该直线基本上和标的体的纵向轴线平行。
17.根据权利要求15所述的定位系统,还包括一个连接装置,用以稳定标的体相对于车辆的位置和用于相对于要被确定的车辆上的位置稳定所述点。
18.根据权利要求15所述的定位系统,其特征在于:所述连接装置包括一个连接臂和一个可拆卸地连接到车辆上的连接器,连接臂通过第一枢轴连接到标的体并通过第二枢轴连接到连接器。
19.根据权利要求1所述的定位系统,还包括一个连接装置,用以稳定标的体相对于车辆的位置和用于相对于要被确定的车辆上的位置稳定点确定器上的所述点。
20.根据权利要求19所述的定位系统,其特征在于:所述连接装置还包括一个点确定器连接到其上的接收器和一个与车辆相连的连接器。
21.根据权利要求20所述的定位系统,其特征在于:所述接收器包括一个参考部件,其限定了连接装置相对于点确定器上所述点的位置。
22.根据权利要求21所述的定位系统,其特征在于:所述连接器限定了将要被确定的车辆上位置和参考部件之间的位置关系。
23.根据权利要求20所述的定位系统,其特征在于:所述接收器限定了一个一部分点确定器被插入的圆柱形凹槽。
24.根据权利要求20所述的定位系统,其特征在于:所述连接装置适于连接到车辆的支撑件上。
25.根据权利要求20所述的定位系统,其特征在于:所述接收器限定了一个一部分点确定器被插入的圆柱形凹槽。
26.根据权利要求25所述的定位系统,其特征在于:参考部件和接收器防止点确定器在三个轴线上相对于连接装置运动。
27.根据权利要求26所述的定位系统,其特征在于:所述参考部件是限定一部分凹槽的平面。
28.一种使用标的系统获得物体上位置的方位的方法,其中标的系统包括:一个标的体;至少一个设置在标的体上的标的元件;和一个从标的体延伸的点确定器,该点确定器包括一个能邻近物体上的所述位置设定的点,该方法包括下述步骤:
当将标的系统的标的体设置在至少三个不同的位置处,同时将点确定器的点邻近物体上的所述位置固定时,对标的系统的所述至少一个标的元件成像;
根据在成像步骤中获得的所述至少一个标的图案的图像确定标的体在所述至少三个不同位置的各位置处的位置;
根据标的体的所述至少三个不同的位置确定点确定器的点的位置。
29.根据权利要求28所述的方法,其中:所述点确定器上的点位于距标的体的已知位置处。
30.根据权利要求29所述的方法,其中:定位系统计算标的体的位置并从标的体的位置内插所述点的位置。
31.根据权利要求28所述的方法,其中:所述点位于点确定器的末端。
32.根据权利要求31所述的方法,其中:所述点位于点确定器末端处的圆锥形突起的顶点处。
33.根据权利要求28所述的方法,其中:点确定器包括一个或多个接头,而且一个或多个接头使所述点相对标的体位于不同的位置。
34.根据权利要求33所述的方法,其中:所述点可相对于标的体设置在一定数量的点位置中。
35.根据权利要求28所述的方法,其中:定位系统计算标的体的位置并从标的体的位置内插所述点的位置,而且对标的系统成像的步骤包括:
内插各点位置处所述点的位置,
将所述点对于各点位置的内插位置与车辆上位置的预算位置进行比较,
通过选择最接近预算位置的内插位置来得到车辆上所述位置的方位。
36.根据权利要求28所述的方法,其中标的元件沿标的体设置在一条直线上。
37.根据权利要求36所述的方法,其中该直线基本上和标的体的纵向轴线平行。
38.根据权利要求36所述的方法,其中所述标的系统包括一个连接装置,用以稳定标的体相对于车辆的位置和用于相对于要被确定的车辆上的位置稳定所述点。
39.根据权利要求28所述的方法,还包括使用标的系统触发成像的步骤。
40.根据权利要求39所述的方法,其中触发步骤选择地改变定位系统进行的一个或多个标的元件的探测。
41.根据权利要求40所述的方法,其中触发步骤对定位系统选择地隐藏或暴露一个或多个标的元件。
42.根据权利要求28所述的方法,还包括通过确定所述点相对于标的体的位置关系来校准所述标的系统的步骤。
43.根据权利要求42所述的方法,其中校准标的系统的步骤包括:
将标的系统的标的体设置在至少三个不同的位置处,同时将点确定器的点邻近车辆上的所述位置固定,
确定标的体在至少三个不同位置的各位置处的方位,和
从标的体的所述至少三个不同位置内插点确定器的所述点。
44.根据权利要求42所述的方法,其中校准标的系统的步骤包括:
将标的系统的标的体设置在至少三个不同的位置处,同时将点确定器保持在校准固定件中,
确定标的体在至少三个不同位置的各位置处的方位,和
从标的体的所述至少三个不同位置内插所述点相对于标的体的位置。
45.根据权利要求44所述的方法,其中在标的体的定位期间,所述固定件将点确定器的所述点固定在一个位置上。
46.一种使用标的系统测量车辆上乘坐高度的方法,其中该标的系统包括:一个标的体;至少一个设置在标的体上的标的元件;和一个从标的体延伸的点确定器,该点确定器包括一个能邻近车辆上的参考点设定的点,该方法包括下述步骤:
对标的系统进行成像以获得参考点的位置;
定义一参考平面;
计算参考平面和参考点之间的乘坐高度;
将计算的乘坐高度和乘坐高度的规定范围进行比较。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US21439000P | 2000-06-28 | 2000-06-28 | |
| US60/214,390 | 2000-06-28 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1443298A CN1443298A (zh) | 2003-09-17 |
| CN1250932C true CN1250932C (zh) | 2006-04-12 |
Family
ID=22798915
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB018112625A Expired - Lifetime CN100447527C (zh) | 2000-06-28 | 2001-06-27 | 抗闪光定位系统 |
| CN01811872.0A Expired - Lifetime CN1250932C (zh) | 2000-06-28 | 2001-06-27 | 和定位系统一起使用的标的系统 |
| CN01811873.9A Expired - Lifetime CN1250937C (zh) | 2000-06-28 | 2001-06-28 | 用于进行车轮校准的方法和系统 |
| CN01811876.3A Expired - Lifetime CN1255665C (zh) | 2000-06-28 | 2001-06-28 | 测量车轮磨胎半径的方法和设备 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB018112625A Expired - Lifetime CN100447527C (zh) | 2000-06-28 | 2001-06-27 | 抗闪光定位系统 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN01811873.9A Expired - Lifetime CN1250937C (zh) | 2000-06-28 | 2001-06-28 | 用于进行车轮校准的方法和系统 |
| CN01811876.3A Expired - Lifetime CN1255665C (zh) | 2000-06-28 | 2001-06-28 | 测量车轮磨胎半径的方法和设备 |
Country Status (8)
| Country | Link |
|---|---|
| US (4) | US6560883B2 (zh) |
| EP (4) | EP1295086B1 (zh) |
| JP (5) | JP2004502154A (zh) |
| CN (4) | CN100447527C (zh) |
| AU (3) | AU2001273007A1 (zh) |
| DE (2) | DE60144184D1 (zh) |
| TW (5) | TWI247094B (zh) |
| WO (4) | WO2002001148A2 (zh) |
Families Citing this family (89)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE1013152A3 (nl) * | 1999-11-24 | 2001-10-02 | Krypton Electronic Eng Nv | Werkwijze voor het bepalen van het dynamisch gedrag van een voertuig op een testbank. |
| AUPR529901A0 (en) * | 2001-05-28 | 2001-06-21 | Lynx Engineering Consultants Pty Ltd | Automated wheel skid detector |
| US6661505B2 (en) * | 2001-06-28 | 2003-12-09 | Snap-On Technologies, Inc. | Method and system for measuring caster trail |
| US6912477B2 (en) * | 2002-02-12 | 2005-06-28 | Snap-On Incorporated | Method and apparatus for determining ride height of a vehicle |
| US7302093B2 (en) * | 2002-03-26 | 2007-11-27 | Hunter Engineering Company | Color vision vehicle wheel alignment system |
| EP1398610B1 (en) * | 2002-09-13 | 2005-05-25 | Snap-on Equipment Srl a unico socio. | Method and apparatus for determining geometrical data of a motor vehicle wheel mounted rotatably about an axis of rotation |
| US6871409B2 (en) | 2002-12-18 | 2005-03-29 | Snap-On Incorporated | Gradient calculating camera board |
| US7386590B2 (en) * | 2003-01-03 | 2008-06-10 | Microsoft Corporation | System and method for improved synchronization between a server and a client |
| WO2004111569A1 (en) * | 2003-06-11 | 2004-12-23 | Snap-On Incorporated | Wheel alignment with surface-oriented runout determination |
| EP1498688B1 (de) * | 2003-07-17 | 2005-09-21 | AXIOS 3D Services GmbH | Lokator und optisches Messsystem |
| US7532742B2 (en) * | 2003-07-31 | 2009-05-12 | Snap-On Incorporated | Two-wheel alignment adjustment method |
| WO2005012832A1 (en) * | 2003-07-31 | 2005-02-10 | Snap-On Incorporated | Vehicle wheel alignment adjustment method |
| US20050060899A1 (en) * | 2003-09-23 | 2005-03-24 | Snap-On Technologies, Inc. | Invisible target illuminators for 3D camera-based alignment systems |
| US7308971B2 (en) * | 2003-12-19 | 2007-12-18 | Hunter Engineering Company | Turn plate and slip plate centering and locking mechanism |
| GB0413827D0 (en) | 2004-06-21 | 2004-07-21 | Renishaw Plc | Scale reading apparatus |
| ITPD20040224A1 (it) * | 2004-09-07 | 2004-12-07 | Spanesi S P A | Attrezzatura per la determinazione dell'assetto delle ruote di un autoveicolo |
| US7328124B2 (en) * | 2004-10-07 | 2008-02-05 | Hunter Engineering Company | Apparatus and method for measuring and compensating steering-angle sensitive alignment measurements |
| US7307737B1 (en) * | 2004-10-08 | 2007-12-11 | Snap-On Incorporated | Three-dimensional (3D) measuring with multiple reference frames |
| GB0428165D0 (en) * | 2004-12-23 | 2005-01-26 | Renishaw Plc | Position measurement |
| US7143519B2 (en) * | 2004-12-30 | 2006-12-05 | Snap-On Incorporated | Alignment system with locking turntables and skid plates |
| US7788815B2 (en) | 2005-01-18 | 2010-09-07 | Wilkinson & Associates | Prism pole with direct readout |
| US7780070B2 (en) * | 2005-04-11 | 2010-08-24 | The Boeing Company | Method of manufacturing a product using scan targets |
| US20060282999A1 (en) * | 2005-06-20 | 2006-12-21 | Diptarka Majumdar | Electrodes, inner layers, capacitors and printed wiring boards and methods of making thereof - part II |
| US20070009136A1 (en) * | 2005-06-30 | 2007-01-11 | Ivan Pawlenko | Digital imaging for vehicular and other security applications |
| ES2367366T3 (es) * | 2006-04-10 | 2011-11-02 | Snap-On Equipment Srl A Unico Socio | Aparato de alineación de ruedas en 3d sin contacto, sistema y procedimiento del mismo. |
| US7755402B1 (en) | 2006-04-28 | 2010-07-13 | Nvidia | Calibration of separate delay effects for multiple data strobe signals |
| US7313869B1 (en) | 2006-07-18 | 2008-01-01 | Snap-On Incorporated | Vehicle wheel alignment system and methodology |
| US20080119978A1 (en) * | 2006-11-20 | 2008-05-22 | Hunter Engineering Company | Method and Apparatus For Wheel Assembly Force Moment Arm Measurement |
| US7698826B2 (en) * | 2007-02-12 | 2010-04-20 | Hubbs Machine & Manufacturing Co. | Refurbishable retro-reflective photogrammetric target |
| US7424387B1 (en) | 2007-04-18 | 2008-09-09 | Snap-On Incorporated | Method for use with an optical aligner system for positioning a fixture relative to a vehicle |
| DE602007013623D1 (de) * | 2007-05-30 | 2011-05-12 | Trimble Ab | Target zur verwendung bei mess- und vermessungsanwendungen |
| US7870677B2 (en) * | 2007-05-31 | 2011-01-18 | Snap-On Incorporated | Lightweight wheel clamp for vehicle wheel alignment system |
| US7640673B2 (en) * | 2007-08-01 | 2010-01-05 | Snap-On Incorporated | Calibration and operation of wheel alignment systems |
| US7855783B2 (en) * | 2007-09-18 | 2010-12-21 | Snap-On Incorporated | Integrated circuit image sensor for wheel alignment systems |
| DE102009007291A1 (de) | 2009-01-27 | 2010-07-29 | Aesculap Ag | Chirurgische Referenzierungseinheit, chirurgisches Instrument und chirurgisches Navigationssystem |
| US8104185B2 (en) * | 2009-12-18 | 2012-01-31 | Snap-On Incorporated | Lightweight wheel clamp for vehicle wheel alignment system |
| DE102010040655A1 (de) * | 2010-09-13 | 2012-03-15 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Kalibrieren eines Referenzsystems zur Fahrzeugvermessung |
| FR2966586B1 (fr) * | 2010-10-25 | 2013-05-24 | Peugeot Citroen Automobiles Sa | Dispositif pour determiner les coordonnees de la position d'un point et son application a la determination de la position d'un mannequin a l'interieur d'un vehicule automobile |
| US8230609B1 (en) * | 2010-11-30 | 2012-07-31 | Cook-Sanders Associates, Inc. | Survey pole positioning system |
| CN102147227B (zh) * | 2011-01-04 | 2012-10-03 | 安徽福马车桥有限公司 | 汽车前束的测量方法 |
| DE102012200415A1 (de) * | 2011-03-29 | 2012-10-04 | Robert Bosch Gmbh | System und Verfahren zum Kalibrieren eines Referenzsystems zur Fahrzeugvermessung |
| CN102826073A (zh) * | 2011-06-16 | 2012-12-19 | 彭圣普 | 动态双轴转向汽车前轮滑移调整装置 |
| CN102384728B (zh) * | 2011-08-03 | 2014-07-09 | 桂林博达汽车科技有限公司 | 应用后倾角与外倾角改变量测量车辆最大转向角的方法 |
| US9330448B2 (en) | 2011-09-21 | 2016-05-03 | Toyota Motor Engineering & Manufacturing North America, Inc. | Adaptive feature recognition tool |
| DE102011084876A1 (de) * | 2011-10-20 | 2013-04-25 | Robert Bosch Gmbh | System und Verfahren zur Achsvermessung eines Kraftfahrzeugs |
| US20150094911A1 (en) * | 2012-03-02 | 2015-04-02 | Pascal Munnix | Device and method for determining the driving state of a vehicle |
| US9212907B2 (en) | 2012-04-27 | 2015-12-15 | Snap-On Incorporated | Short rolling runout compensation for vehicle wheel alignment |
| DE102012011518B3 (de) | 2012-06-08 | 2013-10-17 | Trimble Jena Gmbh | Geodätisches ziel und positionsbestimmungssystem |
| US20140000516A1 (en) * | 2012-06-29 | 2014-01-02 | Toyota Motor Engineering & Manufacturing North America, Inc. | Digital point marking transfer |
| CN102735456A (zh) * | 2012-07-05 | 2012-10-17 | 烟台高易电子科技有限公司 | 小标靶3d汽车四轮定位仪 |
| CN102735457B (zh) * | 2012-07-06 | 2014-12-24 | 烟台高易电子科技有限公司 | 3d四轮定位仪及其测量方法 |
| DE102012215754A1 (de) * | 2012-09-05 | 2014-03-06 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Fahrzeugvermessung |
| US8825303B1 (en) * | 2013-03-28 | 2014-09-02 | Snap-On Incorporated | Wheel alignment apparatus and method for vehicles having electro-mechanical power steering |
| JP5923054B2 (ja) * | 2013-04-08 | 2016-05-24 | 株式会社神戸製鋼所 | 形状検査装置 |
| US9021872B2 (en) * | 2013-06-27 | 2015-05-05 | Motool | System for measuring suspension sag |
| US9986232B1 (en) | 2014-04-25 | 2018-05-29 | Hunter Engineering Company | Method for distance calibration of machine vision vehicle service system |
| WO2016100604A1 (en) | 2014-12-17 | 2016-06-23 | Snap-On Incorporated | Live ride height measurement |
| KR102005875B1 (ko) * | 2015-01-07 | 2019-07-31 | 스냅-온 인코포레이티드 | 롤링 가상의 휠 스핀들 캘리브레이션 |
| CN104742968B (zh) * | 2015-02-09 | 2017-03-15 | 合肥工业大学 | 一种双前桥商用车前束与外倾角匹配方法 |
| DE102015203120B4 (de) * | 2015-02-20 | 2020-12-10 | Ford Global Technologies, Llc | Dynamische Anpassung von Spur und Sturz mittels einer piezoelektrischen Einrichtung |
| CN104713499B (zh) * | 2015-04-07 | 2017-05-17 | 深圳市龙牌科技有限公司 | 车桥定位仪 |
| EP3090907B1 (en) * | 2015-05-05 | 2020-08-12 | Volvo Car Corporation | Secondary steering system unit, secondary steering system, vehicle and a method for secondary steering |
| KR101611135B1 (ko) * | 2015-07-01 | 2016-04-08 | 기아자동차주식회사 | 휠 얼라이먼트 측정 시스템 및 측정 방법 |
| CN105091794A (zh) * | 2015-08-19 | 2015-11-25 | 深圳科澳汽车科技有限公司 | 一种检测车辆轮胎外倾角与前束角的装置及方法 |
| US10473458B2 (en) | 2015-10-06 | 2019-11-12 | Snap-On Incorporated | Self-calibrating wheel aligner with improved portability |
| GB201517926D0 (en) * | 2015-10-09 | 2015-11-25 | Wheelright Ltd | Tyre condition analysis |
| DE102016001592A1 (de) * | 2016-02-11 | 2017-08-17 | Audi Ag | Verfahren zur Beeinflussung der Fahrtrichtung von Kraftfahrzeugen |
| FR3056171B1 (fr) * | 2016-09-20 | 2020-05-08 | Renault S.A.S | Methode d'installation d'un referentiel geometrique sur un sol pour la calibration de composants electriques ou electroniques d'un vehicule automobile et un equipement adapte. |
| DE102017204853A1 (de) * | 2016-11-28 | 2018-05-30 | Hans-Jürgen Schulze | Mehrspuriges Kraftfahrzeug |
| CN108267104A (zh) * | 2018-01-22 | 2018-07-10 | 浙江大学 | 一种基于双目视觉的轴类零件半径尺寸测量方法 |
| CN108413855B (zh) * | 2018-02-24 | 2019-12-10 | 第一拖拉机股份有限公司 | 一种电子卡规的校准及评定方法 |
| DE102018202854B4 (de) * | 2018-02-26 | 2020-01-02 | Audi Ag | Verfahren zum Betrieb eines Bordnetzes eines Hybridkraftfahrzeugs und Hybridkraftfahrzeug |
| US11835646B2 (en) | 2018-04-30 | 2023-12-05 | BPG Sales and Technology Investments, LLC | Target alignment for vehicle sensor calibration |
| US11624608B2 (en) | 2018-04-30 | 2023-04-11 | BPG Sales and Technology Investments, LLC | Vehicular alignment for sensor calibration |
| US11597091B2 (en) | 2018-04-30 | 2023-03-07 | BPG Sales and Technology Investments, LLC | Robotic target alignment for vehicle sensor calibration |
| US11243074B2 (en) | 2018-04-30 | 2022-02-08 | BPG Sales and Technology Investments, LLC | Vehicle alignment and sensor calibration system |
| US11781860B2 (en) | 2018-04-30 | 2023-10-10 | BPG Sales and Technology Investments, LLC | Mobile vehicular alignment for sensor calibration |
| CN108917661B (zh) * | 2018-05-25 | 2020-10-09 | 深圳市沃特沃德股份有限公司 | 一种车轮定位的检测方法、系统及汽车 |
| JP7000254B2 (ja) * | 2018-06-01 | 2022-01-19 | トヨタ自動車株式会社 | ホイールアライメント調整システム |
| US11008014B2 (en) * | 2018-08-14 | 2021-05-18 | Ford Global Technologies, Llc | Methods and apparatus to determine vehicle weight information based on ride height |
| EP3850306A4 (en) | 2018-09-13 | 2022-09-21 | Snap-On Incorporated | AUTOMOTIVE ALIGNMENT DEVICE WITH ENHANCED ACCURACY AND CONTINUOUS POSITIONING USING DRIVE DIRECTION CALCULATION |
| CN111256636B (zh) * | 2018-11-30 | 2021-11-19 | 上海电气电站设备有限公司 | 一种叶片扭转量的测量方法 |
| CN110008823B (zh) * | 2019-02-19 | 2020-07-21 | 阿里巴巴集团控股有限公司 | 车辆定损方法和装置、电子设备 |
| TWI790411B (zh) | 2019-11-22 | 2023-01-21 | 財團法人工業技術研究院 | 轉向裝置及方法 |
| WO2021257515A1 (en) * | 2020-06-15 | 2021-12-23 | Snap-On Incorporated | Apparatus and method for calibrating and aligning automotive sensors |
| CN112798302A (zh) * | 2020-12-30 | 2021-05-14 | 湖北三江航天万山特种车辆有限公司 | 一种独立悬架转向轮前束调整与测量方法 |
| US20220221271A1 (en) * | 2021-01-11 | 2022-07-14 | BPG Sales and Technology Investments, LLC | Wheel alignment measurement system and method |
| CN115452422B (zh) * | 2022-08-01 | 2024-06-11 | 中国第一汽车股份有限公司 | 一种考虑胎面磨损的轮胎滚动半径和负荷半径的试验方法 |
| CN117565975B (zh) * | 2024-01-17 | 2024-04-16 | 中国第一汽车股份有限公司 | 车辆后倾角的调整方法、系统、电子设备及存储介质 |
Family Cites Families (60)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR971205A (fr) | 1938-11-14 | 1951-01-15 | Franco Belge Du Caoutchouc Mou | Procédé pour la fabrication du caoutchouc cellulaire à cellules étanches |
| US3187440A (en) | 1961-08-18 | 1965-06-08 | Merrill | Dynamic wheel alignment testing apparatus |
| US3330044A (en) * | 1965-05-11 | 1967-07-11 | Bear Mfg Co | Attaching means for wheel gauges and the like |
| US3643337A (en) | 1968-08-05 | 1972-02-22 | Roy E Dick | Automobile front end alignment equipment |
| US4110913A (en) | 1971-12-06 | 1978-09-05 | Dick Roy E | Automobile front end alignment equipment |
| US3953134A (en) * | 1974-09-23 | 1976-04-27 | Ammco Tools, Inc. | Automotive wheel alignment instrument |
| DE2650577A1 (de) * | 1976-11-04 | 1978-05-11 | Rohe Gmbh A | Vorrichtung zum vermessen des radeinschlagwinkels von lenkraedern |
| US4249824A (en) * | 1978-06-08 | 1981-02-10 | Fmc Corporation | Apparatus for measuring wheel alignment of motor vehicles |
| US4176463A (en) * | 1978-06-14 | 1979-12-04 | Ringle Gerald D | Wheel alignment gauge assembly and adapter therefor |
| US4303338A (en) * | 1979-09-04 | 1981-12-01 | Ammco Tools, Inc. | Wheel alignment method and apparatus |
| US4466196A (en) * | 1982-02-17 | 1984-08-21 | Woodruff James L | Laser alignment system for vehicles |
| US4479382A (en) * | 1982-04-05 | 1984-10-30 | The Goodyear Tire & Rubber Company | System for testing a tire to avoid a torque steer effect |
| US4643578A (en) * | 1985-03-04 | 1987-02-17 | Robotic Vision Systems, Inc. | Arrangement for scanned 3-D measurement |
| GB2180117B (en) * | 1985-09-05 | 1989-09-06 | Ferranti Plc | Three-dimensional position measuring apparatus |
| FR2709557B1 (fr) * | 1986-02-19 | 1995-12-01 | Sagem | Dispositif optique de mesure à distance des variations d'orientation d'un objet. |
| SE453779B (sv) * | 1986-07-07 | 1988-02-29 | Samefa Ab | Metpunktsavkennare for ett lengdmetningsdon |
| US4726122A (en) * | 1986-11-03 | 1988-02-23 | Nicator Ab | Wheel alignment apparatus for vehicles |
| US5024001A (en) * | 1988-10-07 | 1991-06-18 | Balco, Incorporated | Wheel alignment rim clamp claw |
| US4977524A (en) * | 1989-01-03 | 1990-12-11 | Hunter Engineering Company | Electronic measuring gauge and apparatus for accurate vehicle stance diagnosis and guidance in effecting wheel alignment |
| US5029397A (en) | 1989-02-21 | 1991-07-09 | Global Laser Systems Inc. | Method of measuring a vehicular frame to determine alignment |
| US5014227A (en) * | 1989-07-17 | 1991-05-07 | Bear Automotive Service Equipment Company | Caster and steering axis inclination measurement technique |
| JP2588982B2 (ja) * | 1990-02-13 | 1997-03-12 | 本田技研工業株式会社 | 車輪検査方法及び装置 |
| FR2663733B2 (fr) * | 1990-03-19 | 1994-07-01 | Canovas Gines | Dispositif de controle de l'usure et pression des pneus et de la geometrie des trains de pneus. |
| US5218556A (en) * | 1990-12-24 | 1993-06-08 | Fmc Corporation | Steering pivot axis orientation measurement apparatus and method |
| GB2258315B (en) | 1991-08-01 | 1994-09-28 | Churchill V L Ltd | Wheel alignment measurement system |
| US5165177A (en) | 1991-09-17 | 1992-11-24 | Bear Automotive Service Equipment Company | SAI and caster compensation for live caster and live camber readings |
| US5257458A (en) | 1991-10-02 | 1993-11-02 | Arthur Koerner | Method and apparatus for determining caster and steering axis inclination angles |
| NO174025C (no) * | 1991-10-11 | 1994-03-02 | Metronor Sa | System for punktvis maaling av romlige koordinater |
| US5208646A (en) * | 1991-12-20 | 1993-05-04 | Fmc Corporation | Wheel alignment system |
| US5724743A (en) * | 1992-09-04 | 1998-03-10 | Snap-On Technologies, Inc. | Method and apparatus for determining the alignment of motor vehicle wheels |
| CA2143844C (en) * | 1992-09-04 | 1998-12-29 | Bernie F. Jackson | Method and apparatus for determining the alignment of motor vehicle wheels |
| US5809658A (en) * | 1993-09-29 | 1998-09-22 | Snap-On Technologies, Inc. | Method and apparatus for calibrating cameras used in the alignment of motor vehicle wheels |
| US5586062A (en) | 1993-10-04 | 1996-12-17 | Hunter Engineering Company | Vehicle wheel alignment utilizing wheel offset and body center line |
| US5519488A (en) * | 1994-02-01 | 1996-05-21 | Fmc Corporation | Eight sensor wheel aligner |
| US5553389A (en) * | 1994-05-05 | 1996-09-10 | Hunter Engineering Company | Appartus and method for adjusting vehicle toe alignment angles |
| US5515613A (en) | 1994-11-30 | 1996-05-14 | Hinson; Virgil H. | Apparatus for and method of measuring vehicle reference points |
| US5488472A (en) | 1995-01-10 | 1996-01-30 | Hunter Engineering Company | Apparatus for determining vehicle wheel alignment positions and orientations |
| JPH08261747A (ja) * | 1995-03-23 | 1996-10-11 | Nissan Motor Co Ltd | ホイールアライメント測定装置 |
| FR2735861B1 (fr) * | 1995-06-23 | 1997-08-01 | Muller Bem | Procede et dispositif de mesure de la geometrie de trains roulants de vehicules |
| US5969246A (en) | 1995-10-10 | 1999-10-19 | Snap-On Technologies, Inc. | Apparatus and method for determining axial stability |
| NO301999B1 (no) * | 1995-10-12 | 1998-01-05 | Metronor As | Kombinasjon av laser tracker og kamerabasert koordinatmåling |
| JPH09133510A (ja) * | 1995-11-07 | 1997-05-20 | Sanyo Mach Works Ltd | ホイールアライメント測定方法 |
| US5724128A (en) * | 1995-12-28 | 1998-03-03 | Hunter Engineering Company | Apparatus and method for determining vehicle wheel alignment measurements from three dimensional wheel positions and orientations |
| US6298284B1 (en) * | 1995-12-28 | 2001-10-02 | Hunter Engineering Company | Apparatus and method with improved field of view for determining vehicle wheel alignment measurements from three dimensional wheel positions and orientations |
| US5675515A (en) | 1995-12-28 | 1997-10-07 | Hunter Engineering Company | Apparatus and method for determining vehicle wheel alignment measurements from three dimensional wheel positions and orientations |
| FR2748321B1 (fr) * | 1996-05-06 | 1998-07-17 | Muller Bem | Dispositif pour le controle geometrique de vehicule |
| JPH1073422A (ja) * | 1996-08-29 | 1998-03-17 | Saginomiya Seisakusho Inc | キャスタ角測定装置、ホイールアラインメント測定装置、キャスタ角測定方法及びホイールアラインメント測定方法 |
| US5812256A (en) * | 1996-08-13 | 1998-09-22 | Merilab, Inc. | Vision system for wheel alignment |
| DE19634505C1 (de) * | 1996-08-27 | 1997-11-20 | Daimler Benz Ag | Verfahren zur Erfassung der Achsgeometrie bei Kraftfahrzeugen mit Einzelradaufhängungen |
| US6115927A (en) * | 1996-09-16 | 2000-09-12 | Brewco, Inc. | Measuring device primarily for use with vehicles |
| US6070332A (en) | 1996-10-18 | 2000-06-06 | Aim Automotive Integrated Manufacturing, Inc. | Wheel alignment apparatus |
| US5978077A (en) | 1996-10-31 | 1999-11-02 | Fori Automation, Inc. | Non-contact method and apparatus for determining camber and caster of a vehicle wheel |
| BE1011121A3 (nl) * | 1997-04-21 | 1999-05-04 | Krypton Electronic Eng Nv | Inrichting en werkwijze voor het bepalen van de positie van een punt. |
| US5832617A (en) * | 1997-05-01 | 1998-11-10 | Snap-On Technologies, Inc. | Easy toe adjustment |
| US5875418A (en) * | 1997-06-04 | 1999-02-23 | Snap-On Technologies, Inc. | Compensation for undesired angle deviations arising during vehicle wheel alignment operations |
| BR9810997A (pt) | 1997-07-10 | 2000-08-08 | Snap On Tech Inc | Aparelho e método para ajustar a altura da câmera de alinhamento de rodas |
| US6164405A (en) * | 1997-11-14 | 2000-12-26 | Toyota Jidosha Kabushiki Kaisha | Steering gear box mounting structure |
| US5886782A (en) * | 1998-01-16 | 1999-03-23 | Hedgecock, Jr.; Wesley Javan | Vehicle rear end alignment device |
| US6226879B1 (en) * | 1999-04-23 | 2001-05-08 | Saturn Machine & Welding Co., Inc. | Method of and means for establishing vehicle datum |
| US6237234B1 (en) * | 1999-09-28 | 2001-05-29 | Snap-On Technologies, Inc. | Method and apparatus for measuring vehicle wheel roll radius |
-
2001
- 2001-06-26 US US09/888,391 patent/US6560883B2/en not_active Expired - Lifetime
- 2001-06-27 JP JP2002506039A patent/JP2004502154A/ja not_active Withdrawn
- 2001-06-27 WO PCT/US2001/020367 patent/WO2002001148A2/en active Application Filing
- 2001-06-27 CN CNB018112625A patent/CN100447527C/zh not_active Expired - Lifetime
- 2001-06-27 DE DE60144184T patent/DE60144184D1/de not_active Expired - Lifetime
- 2001-06-27 WO PCT/US2001/020368 patent/WO2002001152A1/en active Application Filing
- 2001-06-27 EP EP01950517A patent/EP1295086B1/en not_active Expired - Lifetime
- 2001-06-27 EP EP01952230A patent/EP1295083A2/en not_active Withdrawn
- 2001-06-27 JP JP2002506035A patent/JP2004502153A/ja active Pending
- 2001-06-27 CN CN01811872.0A patent/CN1250932C/zh not_active Expired - Lifetime
- 2001-06-27 AU AU2001273007A patent/AU2001273007A1/en not_active Abandoned
- 2001-06-28 TW TW090115743A patent/TWI247094B/zh not_active IP Right Cessation
- 2001-06-28 CN CN01811873.9A patent/CN1250937C/zh not_active Expired - Lifetime
- 2001-06-28 CN CN01811876.3A patent/CN1255665C/zh not_active Expired - Lifetime
- 2001-06-28 EP EP01948761.0A patent/EP1295084B1/en not_active Expired - Lifetime
- 2001-06-28 US US09/892,906 patent/US6796043B2/en not_active Expired - Lifetime
- 2001-06-28 AU AU2001270199A patent/AU2001270199A1/en not_active Abandoned
- 2001-06-28 WO PCT/US2001/020454 patent/WO2002001153A1/en active Application Filing
- 2001-06-28 TW TW090115755A patent/TW494225B/zh not_active IP Right Cessation
- 2001-06-28 DE DE60142289T patent/DE60142289D1/de not_active Expired - Lifetime
- 2001-06-28 JP JP2002506041A patent/JP2004501830A/ja not_active Withdrawn
- 2001-06-28 WO PCT/US2001/020456 patent/WO2002001154A1/en active Application Filing
- 2001-06-28 JP JP2002506040A patent/JP4583707B2/ja not_active Expired - Lifetime
- 2001-06-28 TW TW090115775A patent/TW475054B/zh not_active IP Right Cessation
- 2001-06-28 TW TW090115782A patent/TWI225921B/zh not_active IP Right Cessation
- 2001-06-28 EP EP01948763A patent/EP1295085B1/en not_active Expired - Lifetime
- 2001-06-28 AU AU2001270197A patent/AU2001270197A1/en not_active Abandoned
- 2001-06-28 TW TW090115784A patent/TW493060B/zh not_active IP Right Cessation
- 2001-06-28 US US09/892,722 patent/US6532062B2/en not_active Expired - Lifetime
-
2002
- 2002-10-28 US US10/281,107 patent/US6658751B2/en not_active Expired - Lifetime
-
2003
- 2003-07-09 JP JP2003194303A patent/JP2004004108A/ja active Pending
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1250932C (zh) | 和定位系统一起使用的标的系统 | |
| US11597091B2 (en) | Robotic target alignment for vehicle sensor calibration | |
| KR102708589B1 (ko) | 센서 보정을 위한 차량 얼라인먼트 | |
| US11835646B2 (en) | Target alignment for vehicle sensor calibration | |
| CN1742193A (zh) | 车轮定位设备的校准检定 | |
| EP2171397B1 (en) | Calibration and operation of wheel alignment systems | |
| EP4165368A1 (en) | Apparatus and method for calibrating and aligning automotive sensors | |
| KR101831672B1 (ko) | 차량 휠의 오리엔테이션을 결정하는 검출 장치 및 이에 관한 시스템 | |
| US7369222B2 (en) | Wheel aligner measurement module attachment system | |
| JP7566865B2 (ja) | 車両位置合わせ及びセンサ校正システム | |
| CN1764818A (zh) | 用于自适应巡航控制(acc)传感器调节的相机技术 | |
| US6151562A (en) | Vehicle wheel alignment data by rotating vision sensor | |
| CN1908612A (zh) | 汽车车轮定位检测方法及系统 | |
| US20230243676A1 (en) | Vehicular alignment for sensor calibration | |
| US20220057198A1 (en) | Vehicular floor target alignment for sensor calibration | |
| EP3903063B1 (en) | Mobile vehicular alignment for sensor calibration | |
| JP2022515519A (ja) | 車両センサ校正のためのロボットターゲット位置合わせ | |
| CN1533496A (zh) | 自校准位置确定系统和用户界面 | |
| CA3194238A1 (en) | Target alignment for vehicle sensor calibration | |
| CN115688338A (zh) | 基于视觉测量的大口径钢管端面数字化建模方法及系统 | |
| CN112254672A (zh) | 一种高度可调的智能3d信息采集设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term | ||
| CX01 | Expiry of patent term |
Granted publication date: 20060412 |