JP2004017930A - 車両用運転操作補助装置 - Google Patents
車両用運転操作補助装置 Download PDFInfo
- Publication number
- JP2004017930A JP2004017930A JP2002179913A JP2002179913A JP2004017930A JP 2004017930 A JP2004017930 A JP 2004017930A JP 2002179913 A JP2002179913 A JP 2002179913A JP 2002179913 A JP2002179913 A JP 2002179913A JP 2004017930 A JP2004017930 A JP 2004017930A
- Authority
- JP
- Japan
- Prior art keywords
- reaction force
- vehicle
- risk degree
- accelerator pedal
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 claims abstract description 33
- 230000008859 change Effects 0.000 claims description 83
- 230000009471 action Effects 0.000 claims description 59
- 230000001133 acceleration Effects 0.000 abstract 1
- 238000012937 correction Methods 0.000 description 34
- 238000000034 method Methods 0.000 description 25
- 238000012545 processing Methods 0.000 description 21
- 238000010586 diagram Methods 0.000 description 14
- 230000008569 process Effects 0.000 description 14
- 238000013459 approach Methods 0.000 description 11
- 230000000694 effects Effects 0.000 description 6
- 230000007423 decrease Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 240000006829 Ficus sundaica Species 0.000 description 1
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T17/00—Component parts, details, or accessories of power brake systems not covered by groups B60T8/00, B60T13/00 or B60T15/00, or presenting other characteristic features
- B60T17/18—Safety devices; Monitoring
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W50/16—Tactile feedback to the driver, e.g. vibration or force feedback to the driver on the steering wheel or the accelerator pedal
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05G—CONTROL DEVICES OR SYSTEMS INSOFAR AS CHARACTERISED BY MECHANICAL FEATURES ONLY
- G05G1/00—Controlling members, e.g. knobs or handles; Assemblies or arrangements thereof; Indicating position of controlling members
- G05G1/30—Controlling members actuated by foot
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangements or mounting of propulsion unit control devices in vehicles
- B60K26/02—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements
- B60K26/021—Arrangements or mounting of propulsion unit control devices in vehicles of initiating means or elements with means for providing feel, e.g. by changing pedal force characteristics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/20—Direction indicator values
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/06—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance
- F02D11/10—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type
- F02D11/105—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the function converting demand to actuation, e.g. a map indicating relations between an accelerator pedal position and throttle valve opening or target engine torque
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20528—Foot operated
- Y10T74/20534—Accelerator
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- General Physics & Mathematics (AREA)
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
- Control Of Throttle Valves Provided In The Intake System Or In The Exhaust System (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Traffic Control Systems (AREA)
- Controls For Constant Speed Travelling (AREA)
Abstract
【解決手段】車両用運転操作補助装置は、車両状態および車両周囲の走行環境を検出する状況認識手段10,20,40と、状況認識手段10,20,40の検出結果に基づいて自車両もしくは自車両周囲のリスク度を算出するリスク度算出手段50と、リスク度算出手段50で算出されたリスク度に応じてアクセルペダル反力指令値を算出するアクセルペダル反力算出手段70と、アクセルペダル反力算出手段70によって算出されたアクセルペダル反力指令値に応じて、アクセルペダルに操作反力を発生させるアクセルペダル反力発生手段80と、運転者の運転行動意図を検出する運転行動意図検出手段200と、運転行動意図検出手段200の検出結果に基づいて、アクセルペダル反力発生手段80で発生する操作反力を調整するアクセルペダル反力調整手段210,220とを有する。
【選択図】 図1
Description
【発明の属する技術分野】
本発明は、運転者の操作を補助する車両用運転操作補助装置に関する。
【0002】
【従来の技術】
運転者の操作を補助する車両用運転操作補助装置として、特開平10−166889号公報に開示されたものが知られている。この車両用運転操作補助装置は、レーザレーダ等で検出した先行車と自車両との車間距離に基づき、アクセルペダルの操作反力を変更するものである。例えば、検出された車間距離が所定値よりも小さくなった場合に、アクセルペダル反力が重くなるよう設定してドライバに警報を与える。
【0003】
【発明が解決しようとする課題】
しかしながら、上述したような車両用運転操作補助装置は、追い越し等のために運転者が意図的に先行車両に接近している場合でも、車間距離が所定値を下回るとアクセルペダル反力が重くなってしまうという課題があった。
【0004】
【課題を解決するための手段】
本発明による車両用運転操作補助装置は、車両状態および車両周囲の走行環境を検出する状況認識手段と、状況認識手段の検出結果に基づいて自車両もしくは自車両周囲のリスク度を算出するリスク度算出手段と、リスク度算出手段で算出されたリスク度に応じてアクセルペダル反力指令値を算出するアクセルペダル反力算出手段と、アクセルペダル反力算出手段によって算出されたアクセルペダル反力指令値に応じて、アクセルペダルに操作反力を発生させるアクセルペダル反力発生手段と、運転者の運転行動意図を検出する運転行動意図検出手段と、運転行動意図検出手段の検出結果に基づいて、アクセルペダル反力発生手段で発生する操作反力を調整するアクセルペダル反力調整手段とを有する。
【0005】
【発明の効果】
運転行動意図検出手段の検出結果に基づいてアクセルペダルに発生する操作反力を調整するようにしたので、運転者の運転行動意図に応じたアクセルペダル反力制御を行うことができる。
【0006】
【発明の実施の形態】
《第1の実施の形態》
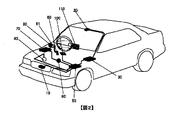
図1は、本発明の第1の実施の形態による車両用運転操作補助装置の構成を示すシステム図であり、図2は、車両用運転操作補助装置を搭載する車両の構成図である。
【0007】
まず、車両用運転操作補助装置の構成を説明する。レーザレーダ10は、車両の前方グリル部もしくはバンパ部等に取り付けられ、水平方向に赤外光パルスを走査する。レーザレーダ10は、前方にある複数の反射物(通常、先行車の後端)で反射された赤外光パルスの反射波を計測し、反射波の到達時間より、先行車までの車間距離と相対速度を検出する。検出した車間距離及び相対速度はリスク度算出部50へ出力される。レーザレーダ10によりスキャンされる前方の領域は、自車正面に対して±6deg 程度であり、この範囲内に存在する前方物体が検出される。車速センサ40は、自車両の走行車速を車輪の回転数などから検出し、リスク度算出部50へと出力する。
【0008】
前方カメラ20は、フロントウィンドウ上部に取り付けられた小型のCCDカメラ、またはCMOSカメラ等であり、前方道路の状況を画像として検出し、画像処理装置30へと出力する。前方カメラ20による検知領域は水平方向に±30deg程度であり、この領域に含まれる前方道路風景が画像として取り込まれる。画像処理装置30は、前方カメラ20から入力された画像に対してフィルタ処理や認識処理などの各種画像処理を施し、リスク度算出部50へ出力する。
【0009】
リスク度算出部50は、レーザレーダ10、画像処理装置30および車速センサ40から入力される信号に基づいて、自車両の周囲環境によるリスク度RPを算出する。リスク度算出部50は、算出したリスク度RPをアクセルペダル反力制御装置70に出力する。
【0010】
図3に示すように、アクセルペダル60にはリンク機構を介してサーボモータ80およびアクセルペダルストロークセンサ81が接続されている。アクセルペダルストロークセンサ81は、リンク機構を介してサーボモータ80の回転角に変換されたアクセルペダル82のストローク量Sを検出する。アクセルペダルストロークセンサ81は、検出したストローク量Sをアクセルペダル反力制御装置70へ出力する。アクセルペダル反力制御装置70は、リスク度算出部50で算出されたリスク度RPに応じてアクセルペダル82に発生させるペダル反力の増加量ΔFを算出する。アクセルペダル反力制御装置70は、算出した反力増加量ΔFと、ストローク量Sに応じてアクセルペダル82に発生させるアクセルペダル反力Fを算出する。そして、反力制御装置80は、算出したアクセルペダル反力Fを実現するようサーボモータ80で発生させるトルクと回転角とを制御し、アクセルペダル82に発生する操作反力を任意に制御する。なお、リスク度RPに応じたアクセルペダル反力制御を行わない場合の、通常のアクセルペダル反力特性は、例えば、ストローク量Sが大きくなるほどアクセルペダル反力Fがリニアに大きくなるよう設定されている。なお、通常の反力特性は、例えばアクセルペダル82の回転中心に設けられたねじりバネ(不図示)のバネ力によって実現することができる。
【0011】
運転行動検出部200は、隣接車線への車線変更や先行車両の追い越し等の運転者の運転行動意図を検出する。運転行動検出部200は、例えば不図示のウィンカーの操作状態を検出し、ウィンカーが操作されると運転者に車線変更や追い越し等を行う意図があると判断する。運転行動検出部200は、検出した運転者の運転行動意図、ここではウィンカー操作のオン/オフ信号をペダル反力特性補正部210へ出力する。ペダル反力特性補正部210は、運転行動検出部200から入力される信号に応じて、リスク度RPに対するペダル反力Fの特性を変更する。ペダル反力特性補正部210におけるペダル反力特性の変更については後述する。
【0012】
次に第1の実施の形態による車両用運転操作補助装置の作用を説明する。
リスク度算出部50は、レーザレーダ10,画像処理装置30および車速センサ40から入力される先行車両までの車間距離Dや相対速度Vr、および自車両の走行車速Vfといった走行状況を認識し、走行状況に基づいて先行車までの現在の接近度合と、今後予測される先行車両の動向による自車両への影響度合とをそれぞれ算出する。さらに、リスク度算出部50は、算出した接近度合と予測影響度合とから将来の走行状況におけるリスク度RPを予測する。ここでは、先行車までの接近度合として余裕時間TTCを、予測される影響度合として車間時間THWを算出する。
【0013】
余裕時間TTCは、現在の走行状況が継続した場合、つまり自車速Vf、先行車速Vaおよび相対車速Vrが一定の場合に、何秒後に、車間距離Dがゼロとなり自車両と先行車両とが接触するかを示す値であり、以下の(式1)により求められる。
【数1】
余裕時間TTC=D/Vr (式1)
【0014】
余裕時間TTCは、先行車に対する現在の自車両の接近度合を示す物理量であり、余裕時間TTCが小さいほど、先行車への接触が緊迫し接近度合が大きいことを意味している。例えば先行車への接近時には、余裕時間TTCが4秒以下となる前に、ほとんどのドライバが減速行動を開始することが知られている。
【0015】
車間時間THWは、自車両が先行車に追従走行している場合に、想定される将来の先行車の車速変化による余裕時間TTCへの影響度合、つまり相対車速Vrが変化すると仮定したときの影響度合を示す物理量である。車間時間THWは、以下の(式2)を用いて算出する。
【数2】
車間時間THW=D/Vf (式2)
【0016】
車間時間THWは、車間距離Dを自車速Vfで除したものであり、先行車の現在位置に自車両が到達するまでの時間を示す。この車間時間THWが大きいほど、周囲環境変化による予測影響度合が小さくなる。つまり、車間時間THWが大きい場合には、もしも将来に先行車の車速が変化しても、先行車までの接近度合には大きな影響を与えず、余裕時間TTCはあまり大きく変化しないことを示す。
【0017】
なお、自車両が先行車両に追従している場合は自車速Vf=先行車速Vaとなるので、(式2)において自車速Vfの代わりに先行車速Vaを用いることもできる。
【0018】
リスク度算出部50は、余裕時間TTCと車間時間THWとに基づいて、以下の(式3)を用いてリスク度RPを算出する。
【数3】
RP=a/THW+b/TTC (式3)
(式3)に示すように、リスク度RPは余裕時間TTCと車間時間THWとを足し合わせて、連続的に表現される物理量である。なお、a、bは、接近度合および予測影響度合にそれぞれ適切な重み付けをするためのパラメータであり、a<bとなるように、適切に設定する。パラメータa、bの値は、例えば、車間時間THW、余裕時間TTCの統計から推定されるa=1,b=8程度に設定することが望ましい。
【0019】
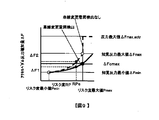
アクセルペダル反力制御装置70は、リスク度RPに応じたペダル反力増加量ΔFを算出する。図4に、リスク度RPに対する反力増加量Δの特性を示す。アクセルペダル反力制御装置70は、図4に示す特性に従って算出した反力増加量ΔFを通常の反力特性に加算し、アクセルペダル60に発生させるアクセルペダル反力Fを算出する。
【0020】
図4に示すように、リスク度RPが最小値RPmin以下の場合には反力増加量ΔFを0とする。これは、予測されるリスク度Pが非常に小さい場合にアクセルペダル反力Fを増加して必要以上にリスク度RPを知らせると、場合によっては運転者が煩わしさを感じる可能性があるためである。運転者がこの煩わしさを感じることを避けるために、アクセルペダル反力増加量ΔFを発生させる最小のリスク度RPminを予め適切に設定する。また、将来予測されるリスク度RPが高く、運転者がアクセルペダル60から足を離すことが好ましい最大のリスク度RPmaxを予め設定する。
【0021】
さらに、最小のリスク度RPminに対応し、個人差も含めて運転者がアクセルペダル反力Fの増加を知覚することができる最小の反力値ΔFmin(第1の反力指令値)を予め設定しておく。同様に、最大のリスク度RPmaxに対応し、個人差も含めて運転者がアクセルペダル反力の増加を確実に知覚することができる最大の反力値ΔFmax(第2の反力指令値)を予め設定しておく。このように、最小のリスク度RPminで最小の反力値ΔFminを増加し、最大のリスク度RPmaxで最大の反力値ΔFmaxを増加することで、運転者に確実にリスク度を認識させることができる。
【0022】
なお、最小のリスク度RPminと最大のリスク度RPmaxの間で、アクセルペダル反力増加量ΔFは最小値ΔFminから最大値ΔFmaxまで指数関数的に増加する。これは以下の(式4)で表される。
【数4】
ΔF=k・RPn (式4)
【0023】
(式4)に示すように、リスク度RPの変化に対して反力増加量ΔFを連続的に設定することにより、アクセルペダル反力Fの増加によって運転者にリスク度RPの変化を連続的に知らせることが可能となる。なお、定数k、nはそれぞれ車種等によって異なり、ドライブシミュレータや実地試験によって取得される結果から、リスク度RPが実際に人間が感じる感覚に即した値としてアクセルペダル反力Fに変換されるように設定する。
【0024】
さらに、リスク度RPが最大値RPmaxを超えると、反力増加量ΔFを反力最大値ΔFmax_actr(第3の反力指令値)まで一気に不連続的に増加させる。これにより、運転者はアクセルペダル60が跳ね上がるような感覚を受け、アクセルペダル60を開放する必要性が高いことを容易に認識することができる。ここで、図4に破線で示すような、第1〜第3の反力指令値を有するリスク度−反力特性を、第1の反力特性とする。
【0025】
このように、余裕時間TTCおよび車間時間THWに基づいて算出されるリスク度RPに応じてアクセルペダル反力Fを制御することにより、運転者にリスク度RPを正確に認識させることができる。ただし、上述したようにリスク度RPが最大値を超えた場合にアクセルペダル60を跳ね上げるように構成すると、とくに運転者が車線変更や先行車両の追い越しをするために意図的に先行車両に接近している場合等に、運転者に煩わしさを与える可能性がある。
【0026】
そこで、本実施の形態においては、リスク度RPが最大値RPmaxを上回る場合に行うアクセルペダル反力制御を運転者の運転行動意図に応じて切り換えるようにする。
【0027】
運転行動検出部200によって所定の運転行動意図、例えば車線変更意図が検出されると、ペダル反力特性補正部210は、リスク度RPに応じて発生するペダル反力Fを調整する。具体的には、車線変更意図が検出された場合には、リスク度RPが最大値RPmaxを上回る領域においても(式4)を用いて反力増加量ΔFを設定する。つまり、車線変更意図が検出されると、リスク度RPが最大値RPmaxを超えても反力増加量ΔFを反力最大値ΔFmax_actrまで一気に増加させず、リスク度RPに応じた反力増加量ΔFを連続的に設定する。
【0028】
図5(a)に車線変更意図が検出されない場合の時間軸に対するリスク度RPおよびペダル反力Fの変化の一例を示し、図5(b)にストローク量Sの変化の一例を示す。また、図6(a)に車線変更意図が検出された場合の時間軸に対するリスク度RPおよびペダル反力Fの変化の一例を示し、図6(b)にストローク量Sの変化の一例を示す。ここでは、図5(b)および図6(b)に示すように、アクセルペダルストローク量Sは一定で自車両が先行車両に徐々に接近している場合を例として説明する。
【0029】
図5(a)および図6(a)に示すように、時間t=tcでリスク度RP=RPminとなるとペダル反力FがΔFminだけ増加し、その後リスク度RPが大きくなるにつれてアクセルペダル反力Fが増加する。車線変更意図が検出されない場合は、図6(a)に示すように時間t=tbでリスク度RP=RPmaxを超えるとアクセルペダル反力Fが不連続的に反力最大値ΔFmax_actr分増加する。アクセルペダル反力Fの増加を受けてアクセルペダル60は開放され(時間t=ta)、リスク度RPおよびアクセルペダル反力Fは0まで低下する。
【0030】
一方、運転行動検出部200によって車線変更意図が検出された場合は、図6(a)に示すように時間t=tbでリスク度RP=RPmaxを超えてからもリスク度RPは連続的に増加する。リスク度RPに応じたアクセルペダル反力Fが発生するため、リスク度RPを認識しながら運転者の意図に応じた運転操作をスムーズに行うことができる。また、ペダル反力Fが一気に増加することがないので、先行車両の追い越し等で加速したいのにアクセルペダル反力Fが大きくて踏み込み難いといった煩わしさを運転者に与えることがない。
【0031】
以上、第1の実施の形態による車両用運転操作補助装置の作用について説明した。次に、以上説明したアクセルペダル反力制御の処理手順について図7を用いて説明する。図7は、リスク度算出部50、アクセルペダル反力制御装置70およびペダル反力特性補正部210で実行される制御プログラムの処理手順の一例を示すフローチャートである。なお、本処理内容は、例えば100msecに一回の周期で連続的に行われる。
【0032】
まず、ステップS101で、リスク度算出部50はレーザレーダ10、前方カメラ20および車速センサ40で検出される車間距離D、自車速Vfおよび先行車速Va等の走行状態を読み込む。ステップS102では、ステップS201で読み込んだ走行状態からリスク度RPを算出する。ステップS103で、ステップS102で算出したリスク度RPが、所定の最小値RPminを上回るか否かを判定する。ステップS103が肯定判定されると、ステップS104へ進み、リスク度RPが所定の最大値RPmax未満であるか否かを判定する。
【0033】
ステップS104が肯定判定されると、ステップS105へ進み、アクセルペダル反力制御装置70はアクセルペダルストロークセンサ81で検出されるストローク量Sを読み込む。ステップS106では、リスク度RPに応じた反力増加量ΔFを算出し、ストローク量Sに応じた通常の反力特性に反力増加量ΔFを加算してアクセルペダル反力Fを算出する。ステップS107では、ステップS106で算出したペダル反力Fを発生するような指令をサーボモータ80に出力する。運転者はペダル反力Fからリスク度RPを認識しながらアクセルペダル60を操作してエンジンの駆動力を調整する。なお、図8に示すようにエンジンの出力トルクはアクセルペダルストローク量Sおよびギアのシフト位置に応じて決定される。
【0034】
ステップS104が否定判定されると、ステップS108へ進む。ステップS108で運転行動検出部200は、ウィンカーの操作状態を検出する。ステップS109で、ウィンカーがオン操作されたか否かを判定する。ステップS109でウィンカーがオンであると肯定判定されると、車線変更意図が検出されたと判断して、リスク度RPに応じたアクセルペダル反力Fを設定するためにステップS105へ進む。このように、運転者の車線変更意図が検出されると、所定の最大値RPmaxを上回る状態でもリスク度RPに応じたペダル反力増加量ΔFを算出し、アクセルペダル反力制御を行う。一方、ステップS109が否定判定されると、車線変更意図は検出されなかったと判断してステップS110へ進む。ステップS110でアクセルペダル反力制御装置70は、反力最大値ΔFmax_actrを増加させるようサーボモータ80に指令を出力し、アクセルペダル反力制御を行う。ステップS107あるいはステップS110の処理により、今回の処理を終了する。なお、ステップS103が否定判定されると、アクセルペダル反力の増加は行わない。
【0035】
このように、以上説明した第1の実施の形態においては、以下の様な効果を奏することができる。
(1)運転行動検出部200の検出結果に基づいて、アクセルペダル60に発生するペダル反力Fを調整するようにした。すなわち、運転行動意図が検出されると、リスク度RPに応じたペダル反力Fを発生させながら、運転者が意図する運転行動を妨げないようにペダル反力Fを調整する。これにより、運転者の運転行動意図に応じたアクセルペダル反力制御を行うことができ、運転者に与える煩わしさを低減することができる。
(2)運転行動検出部200によって所定の運転行動意図が検出されると、リスク度RPに対するペダル反力特性を補正し、リスク度RPおよび運転行動意図に基づいてペダル反力Fを設定するようにした。これにより、リスク度RPをアクセルペダル反力Fとして運転者に認識させることができるとともに、運転行動意図に応じたアクセルペダル反力制御を行うことができる。
(3)運転行動意図検出部200によって所定の運転行動意図が検出された場合は、運転行動意図が検出されない場合に比べてアクセルペダル操作が容易に行えるように、運転行動意図が検出されない場合に比べてペダル反力Fを小さくする。これにより、運転者の運転行動意図に応じたアクセルペダル反力制御を行うことができ、運転者に与える煩わしさを低減することができる。
(4)リスク度RPに対するペダル反力特性は、最小のリスク度RPminに対応する最小値ΔFmin(第1の反力指令値)と最大のリスク度RPmaxに対応する最大値ΔFmax(第2の反力指令値)との間で、リスク度RPが大きくなるほど反力増加量ΔFが増加し、最大のリスク度RPmaxを超えると反力増加量ΔFが反力最大値ΔFmax_actr(第3の反力指令値)まで不連続に増加するように設定される。所定の運転行動意図が検出されると、リスク度RPが最大のリスク度RPmaxを上回る場合の反力増加量ΔFが反力最大値ΔFmax_actrよりも小さくなるように設定されるので、ペダル反力Fが不連続に増加することによるアクセルペダル60が跳ね上げられるような違和感を運転者に与えることがない。
(5)運転行動検出部200によって車線変更意図を検出するので、とくに車線変更を意図しているにも関わらず隣接車線に他車両が存在する等の理由で車線変更を実行できない場合に、ペダル反力Fの増加による煩わしさを与えることがない。これにより、運転者の意図に応じた運転操作を行うことができる。
(6)運転行動検出部200は、ウィンカーの操作状態の基づいて車線変更意図を検出するので、車線変更意図を検出するための特別な装置を設ける必要がなく、コストを低減することができる。
(7)リスク度算出部50は、自車速Vfと車間距離Dとに基づいて先行車両への接近度合を示す車間時間THWを算出し、相対車速Vrと車間距離Dとに基づいて先行車両の挙動変化による自車両への影響度合を示す余裕時間TTCを算出する。そして、車間時間THWと余裕時間TTCとを用いてリスク度RPを算出するので、自車両のリスク度RPを正確に算出することができる。
【0036】
《第2の実施の形態》
以下に、本発明の第2の実施の形態による車両用運転操作補助装置について説明する。第2の実施の形態による車両用運転操作補助装置の構成は、図1および図2に示した第1の実施の形態と同様である。ここでは、第1の実施の形態との相違点を主に説明する。
【0037】
図9に、第2の実施の形態におけるリスク度RPに対するアクセルペダル反力増加量ΔFの特性を示す。図9において、車線変更意図が検出されなかった場合の反力増加量特性を破線で示し、車線変更意図が検出された場合の反力増加量特性を実線で示す。ここで、図9に破線で示すような最小の反力値ΔFmin(第1の反力指令値)および最大の反力値ΔFmax(第2の反力指令値)を有するリスク度―反力特性を第2の反力特性とする。図9に示すように、車線変更意図が検出された場合には、車線変更意図が検出されない場合に比べてリスク度RPに対する反力増加量ΔFの変化率を小さくする。つまり、リスク度RPの増加に対して反力増加量ΔFが緩やかに増加するように設定する。例えば、同一のリスク度RPaに対し、車線変更意図が検出された場合の反力増加量ΔF1が、意図が検出されない場合の反力増加量ΔF2よりも小さくなるように設定する(ΔF1<ΔF2)。また、所定の最大値RPmaxを超えてからも反力最大値ΔFmax_actrまで不連続的に増加させずに、リスク度RPに応じた反力増加量ΔFを発生させる。車線変更意図が検出された場合の反力増加量ΔFの上限は、例えば車線変更意図が検出されない場合の最大のリスク度RPmaxに対応する反力の最大値ΔFmaxとする。
【0038】
以下に、第2の実施の形態におけるリスク度RPに対する反力増加量ΔFの設定について説明する。第2の実施の形態においては、上述した第1の実施の形態と同様に(式4)を用いてリスク度RPに対する反力増加量ΔFを算出する。ただし、車線変更意図が検出された場合は、意図が検出されない場合に算出する反力増加量ΔFに定数c(0<c<1)を積算して反力増加量ΔFを補正する。反力増加量ΔFの補正値ΔFcは、例えば以下の(式5)のように表すことができる。
【数5】
ΔFc=c×k×RPn (式5)
【0039】
図10(a)に時間軸に対するリスク度RPおよびペダル反力Fの変化の一例を示し、図10(b)にストローク量Sの変化の一例を示す。ここでは、図10(b)に示すように、アクセルペダルストローク量Sは一定で自車両が先行車両に徐々に接近している場合を例として説明する。なお、図10(a)は時間t=tsで運転行動意図が検出されたことを示しており、時間t=ts以降は、車線変更意図が検出された状態のペダル反力特性を実線で示し、車線変更意図が検出されなかった場合のペダル反力特性を破線で示す。
【0040】
図10(a)に示すように、時間t=tcでリスク度RP=RPminとなった後、リスク度RPが大きくなるにつれてアクセルペダル反力Fが増加する。時間t=ts以前は、(式4)を用いてリスク度RPに対する反力増加量ΔFを算出する。時間t=tsで車線変更意図が検出されると、(式5)を用いて反力増加量の補正値ΔFcを算出する。そして、通常の反力特性に補正値ΔFcを加算した補正値Fcをアクセルペダル反力Fとして発生させる。これにより、リスク度RPの増加に対する反力増加量ΔFの変化率が低下し、アクセルペダル反力Fの増加が緩やかになる。車線変更意図が検出された場合は、アクセルペダル60が開放されてストローク量Sが0となるまでリスク度RPに応じたペダル反力Fが発生する。その結果、アクセルペダル反力Fからリスク度RPを認識しながら運転者の意図に応じた運転操作をスムーズに行うことができる。
【0041】
一方、車線変更意図が検出されない場合は、破線で示すようにリスク度RP=RPmaxを超えると反力増加量ΔFを最大反力増加量ΔFまで一気に増加させる。
【0042】
次に、以上説明した第2の実施の形態におけるアクセルペダル反力制御の処理手順について図11を用いて説明する。図11は、リスク度算出部50、アクセルペダル反力制御装置70およびペダル反力特性補正部210で実行される制御プログラムの処理手順の一例を示すフローチャートである。なお、本処理内容は、例えば100msecに一回の周期で連続的に行われる。
【0043】
ステップS201〜ステップS203での処理は、上述した図7のフローチャートにおけるステップS101〜ステップS103での処理と同様であるので説明を省略する。ステップS203が肯定判定されるとステップS204へ進み、アクセルペダル反力制御装置70はアクセルペダルストロークセンサ81で検出されるストローク量Sを読み込む。ステップS205で、(式4)を用いてステップS202で算出されたリスク度RPに応じた反力増加量ΔFを算出し、ストローク量Sに応じた通常の反力特性に加算してアクセルペダル60に発生させるペダル反力Fを算出する。
【0044】
つづくステップS206で運転行動検出部200は、ウィンカーの操作状態を検出する。ステップS207でウィンカーがオン操作されたか否かを判定する。ステップS207でウィンカーがオンであると肯定判定されると、ステップS208へ進む。ステップS208でペダル反力特性補正部210は、ステップS205で算出されたアクセルペダル反力Fを補正する。具体的には、(式5)に示すように補正値ΔFcを算出し、補正値ΔFcに基づく反力補正値Fcを実際のアクセルペダル反力Fとして設定する。一方、ステップS207が否定判定されると、ペダル反力Fの補正は行わない。
【0045】
ステップS209でアクセルペダル反力制御装置70は、ステップS205あるいはステップS208で算出したアクセルペダル反力Fを発生するような指令をサーボモータ80に出力する。
【0046】
なお、車線変更意図が検出された場合のアクセルペダル反力Fは、以下のように補正することもできる。例えば、車線変更意図が検出されない場合のペダル反力Fに定数d(0<d<1)を積算してアクセルペダル反力Fを補正することができる。あるいは、車線変更意図が検出された場合とされない場合とで、反力増加量ΔFを算出するための(式4)の定数kを変更することもできる。この場合、車線変更意図が検出された場合の定数k1を、車線変更意図が検出されない場合の定数k2よりも小さく設定し(k1<k2)、車線変更意図が検出された場合には定数k1を用いて算出した反力増加量ΔFに基づいてアクセルペダル反力Fを算出する。また、車線変更意図が検出された場合とされない場合とで、最大のリスク度RPmaxに対応する反力最大値ΔFmaxを変更することもできる。つまり、車線変更意図が検出された場合は、意図が検出された場合の最大値ΔFmaxよりも小さい反力増加量ΔFcmaxを最大値として設定し、反力増加量ΔFが最小値ΔFminから最大値ΔFcmaxの間で指数関数的に増加するように設定する。
【0047】
このように、以上説明した第2の実施の形態においては、以下のような効果を奏することができる。
(1)所定の運転行動意図が検出された場合には、リスク度RPが同じであっても所定の運転行動意図が検出されない場合に比べて反力増加量ΔFが小さくなるように反力特性を補正する。これにより、運転者の意図に反してアクセルペダル60が押し戻されるような違和感を運転者に与えることを抑制できる。
(2)リスク度RPに対するペダル反力特性は、最小のリスク度RPminに対応する最小値ΔFmin(第1の反力指令値)と最大のリスク度RPmaxに対応する最大値ΔFmax(第2の反力指令値)との間で、リスク度RPが大きくなるほど反力増加量ΔFが増加するように設定される。所定の運転行動意図が検出されると、反力増加量の最大値ΔFmaxを小さくした反力特性に補正する。これにより、所定の運転行動意図が検出された場合には同一のリスク度RPに対して発生するペダル反力Fが小さくなり、運転者に与える違和感を低減することができる。
【0048】
《第3の実施の形態》
以下に、本発明の第3の実施の形態による車両用運転操作補助装置について説明する。図12に、第3の実施の形態による車両用運転操作補助装置の構成を示す。図12において、図1および図2に示した第1の実施の形態と同一の機能を有する要素には同一の符号を付し、詳細な説明を省略する。ここでは、第1の実施の形態との相違点を主に説明する。
【0049】
第3の実施の形態においては、図12に示すように、運転行動検出部200の検出結果に応じてリスク度RPを補正するリスク度補正部220を有している。リスク度補正部220は、運転行動検出部200によって車線変更意図が検出されるとリスク度算出部50で算出されたリスク度RPを小さくするよう補正を行う。
【0050】
自車両が先行車両に接近していく場合、余裕時間TTCや車間時間THWが同じであっても、運転者に車線変更や追い越しを行う意図がある場合とない場合とでは運転者が実際に感じるリスクは異なる。すなわち、車線変更を行う意図をもって先行車両に接近していく場合、運転者は先行車両を避けることを前提に運転操作を行っているため、車線変更の意図がない場合に比べてリスクを低く感じている。そこで、第3の実施の形態においては、運転者の感覚に沿ったリスク度RPを算出するために、車線変更意図が検出された場合とされない場合においてリスク度RPの算出式を変更する。
【0051】
車線変更意図が検出されない場合は、リスク度算出部50において上述したように(式3)を用いてリスク度RPを算出する。車線変更意図が検出されると、リスク度補正部220は、(式3)によって算出したリスク度RPに定数kp(0<kp<1)を積算してリスク度の補正値RPcを算出する。補正値RPcは以下の(式6)のように表される。
【数6】
RPc=kp×(a/THW+b/TTC) (式6)
リスク度補正部220は、補正値RPcをリスク度RPとしてアクセルペダル反力制御装置70へ出力する。
【0052】
次に、以上説明した第3の実施の形態におけるリスク度算出およびアクセルペダル反力制御の処理手順について図13を用いて説明する。図13は、リスク度算出部50、リスク度補正部220,アクセルペダル反力制御装置70およびペダル反力特性補正部210で実行される制御プログラムの処理手順の一例を示すフローチャートである。なお、本処理内容は、例えば100msecに一回の周期で連続的に行われる。
【0053】
ステップS301〜ステップS303での処理は、上述した図7のフローチャートにおけるステップS101〜ステップS103での処理と同様であるので説明を省略する。ステップS303が肯定判定されるとステップS304へ進み、アクセルペダル反力制御装置70はアクセルペダルストロークセンサ81で検出されるストローク量Sを読み込む。ステップS305で運転行動検出部200は、ウィンカーの操作状態を検出する。ステップS306でウィンカーがオン操作されたか否かを判定する。ステップS306でウィンカーがオンであると肯定判定されると、ステップS307へ進む。ステップS307でリスク度補正部220は、(式6)に示すように、ステップS302で算出したリスク度RPに定数kpを乗じてリスク度の補正値RPcを算出し、算出した補正値RPcを実際のリスク度RPとして設定する。
【0054】
ステップS309でアクセルペダル反力制御装置70は、ステップS302あるいはステップS307で設定されたリスク度RPに応じて、(式4)を用いて反力増加量ΔFを算出し、ストローク量Sに応じた通常の反力特性に加算してアクセルペダル60に発生させるペダル反力Fを算出する。ステップS309で、ステップS308で算出したアクセルペダル反力Fを発生するような指令をサーボモータ80に出力する。
【0055】
このように、以上説明した第3の実施の形態においては、以下のような効果を奏することができる。
(1)所定の運転行動意図が検出されると、レーザレーダ10,前方カメラ20および車速センサ40によって検出される車両状態および車両周囲の環境に対するリスク度RPの特性を補正するようにした。これにより、運転者が実際に感じるリスクに沿ったリスク度RPを算出することができる。さらに、運転者の感覚に沿ったアクセルペダル反力制御を行うことができる。
(2)所定の運転行動意図が検出されると、車両状態および走行環境が同じであってもリスク度RPが小さくなるようにリスク度RPの特性を補正する。これにより、運転者が感じるリスクに沿ったリスク度RPを算出することができる。とくに所定の運転行動意図として車線変更意図を検出することにより、運転者の実際の感覚に沿ったリスク度RPを算出することができる。例えば、車線変更を意図しているにもかかわらず隣接車線に他車両が存在して車線変更を実行できずに先行車両に接近している場合、車線変更を意図していない場合に比べてリスク度RPが低くなり、運転者の実際の感覚に沿ったリスク度RPを算出することができる。
(3)所定の運転行動意図が検出されると、(式6)に示すようにリスク度RPの算出式に所定の定数を乗じてリスク度RPが小さくなるように補正するので、運転者の感覚に沿ったリスク度RPを容易に算出することができる。
【0056】
《第4の実施の形態》
以下に、本発明の第4の実施の形態による車両用運転操作補助装置について説明する。第4の実施の形態による車両用運転操作補助装置の構成は、図12に示す第3の実施の形態と同様である。第4の実施の形態は、リスク度補正部220におけるリスク度RPの補正値の算出方法が第3の実施の形態と異なっている。
【0057】
先行車両の追い越しや車線変更を行う場面で自車両付近の隣接車線に他車両が存在する場合、隣接車線がクリアになるまで自車両は自車線で待機する必要がある。このように車線変更を行うタイミングを見計らっている間は、自車両が先行車両に接近した状態で追従走行していても、運転者が実際に感じるリスクは車線変更の意図がない場合に比べて低くなっている。
【0058】
そこで、第4の実施の形態においては、運転行動検出部200で車線変更意図が検出された場合に、リスク度補正部220は以下の(式7)を用いてリスク度の補正値RPc1を算出する。
【数7】
RPc1=kpw×a/THW+b/TTC (式7)
ここで、kpwは定数であり、0<kpw<1となるように適切に設定する。なお、先行車両に追従している場合、相対車速Vr=0であるため、b/TTC=0となる。
【0059】
(式7)からわかるように、とくに先行車両に追従して車線変更のタイミングを見計らっている場合のリスク度RPを、車線変更意図がない場合に比べて小さく設定することができる。
【0060】
このように、以上説明した第4の実施の形態においては、次のような効果を奏することができる。所定の運転行動意図が検出されると、(式7)に示すようにリスク度RPの算出式に所定の定数を乗じてリスク度RPが小さくなるように補正するので、運転者の感覚に沿ったリスク度RPを容易に算出することができる。とくに、車線変更を意図しているにもかかわらず隣接車線に他車両が存在するために車線変更が行えず、先行車両に接近した状態で追従走行する場合のリスク度RPを小さくして運転者の感覚に沿ったリスク度RPを算出することができる。
【0061】
なお、上記実施の形態において運転行動検出部200はウィンカー操作を検出することにより車線変更意図を検出したが、例えば運転者の視線方向に基づいて車線変更意図を検出することもできる。運転者の視線方向に基づく運転行動意図の検出は、例えば特願2001−136628号公報に開示された手法を用いることができる。運転行動検出部200は、現在の走行状態から先行車両の影響を受けない走行状態へ移行するための運転行動意図を検出するものであり、例えば、車線変更意図以外に右左折の意図を検出することもできる。
【0062】
上記実施の形態においてはリスク度RPに対して反力増加量ΔFが指数関数的に増加するように設定したが、例えばリスク度RPの増加に対して反力増加量ΔFがリニアに増加するように設定することもできる。
【0063】
上記実施の形態においては、状況認識手段としてレーザレーダ10、前方カメラ20,および車速センサ40とを用い、アクセルペダル反力算出手段としてアクセルペダル反力制御装置70を用い、アクセルペダル反力発生手段としてサーボモータ80を用い、運転行動意図検出手段として運転行動検出部200を用い、アクセルペダル反力調整手段としてペダル反力特性補正部210およびリスク度補正部220を用いた。なお、例えば状況認識手段としてレーザレーダ10の代わりに別方式のミリ波レーダ等を用いることもできる。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態による車両用運転操作補助装置のシステム図。
【図2】第1の実施の形態による車両用運転操作補助装置を搭載した車両の構成図。
【図3】アクセルペダル周辺の構成図。
【図4】第1の実施の形態におけるリスク度に対する反力増加量の特性を示す図。
【図5】(a)車線変更意図が検出されない場合の時間軸に対するリスク度およびペダル反力の変化を示す図、(b)ストローク量の変化を示す図。
【図6】(a)車線変更意図が検出された場合の時間軸に対するリスク度およびペダル反力の変化を示す図、(b)ストローク量の変化を示す図。
【図7】第1の実施の形態によるアクセルペダル反力制御プログラムの処理手順を示すフローチャート。
【図8】ストローク量に対するエンジントルクの特性を示す図。
【図9】第2の実施の形態におけるリスク度に対する反力増加量の特性を示す図。
【図10】(a)時間軸に対するリスク度およびペダル反力の変化を示す図、(b)ストローク量の変化を示す図。
【図11】第2の実施の形態によるアクセルペダル反力制御プログラムの処理手順を示すフローチャート。
【図12】本発明の第3の実施の形態による車両用運転操作補助装置のシステム図。
【図13】第3の実施の形態によるアクセルペダル反力制御プログラムの処理手順を示すフローチャート。
【符号の説明】
10:レーザレーダ
20:車速センサ
30:前方カメラ
40:画像処理装置
50:リスク度算出部
60:アクセルペダル
70:アクセルペダル反力制御装置
80:サーボモータ
81:アクセルペダルストロークセンサ
200:運転行動検出部
210:ペダル反力特性補正部
220:リスク度補正部
Claims (11)
- 車両状態および車両周囲の走行環境を検出する状況認識手段と、
前記状況認識手段の検出結果に基づいて自車両もしくは自車両周囲のリスク度を算出するリスク度算出手段と、
前記リスク度算出手段で算出されたリスク度に応じてアクセルペダル反力指令値を算出するアクセルペダル反力算出手段と、
前記アクセルペダル反力算出手段によって算出されたアクセルペダル反力指令値に応じて、前記アクセルペダルに操作反力を発生させるアクセルペダル反力発生手段と、
運転者の運転行動意図を検出する運転行動意図検出手段と、
前記運転行動意図検出手段の検出結果に基づいて、前記アクセルペダル反力発生手段で発生する操作反力を調整するアクセルペダル反力調整手段とを有することを特徴とする車両用運転操作補助装置。 - 請求項1に記載の車両用運転操作補助装置において、
前記アクセルペダル反力調整手段は、前記運転行動意図検出手段によって所定の運転行動意図が検出された場合に、前記アクセルペダル反力算出手段で前記反力指令値を算出する際に用いる、前記リスク度に対する前記反力指令値の特性を補正することを特徴とする車両用運転操作補助装置。 - 請求項2に記載の車両用運転操作補助装置において、
前記アクセルペダル反力調整手段は、前記所定の運転行動意図が検出された場合には、前記リスク度算出手段によって算出されるリスク度が同じであっても、前記所定の運転行動意図が検出されない場合に比べて前記反力指令値が小さくなるように前記反力指令値の特性を補正することを特徴とする車両用運転操作補助装置。 - 請求項2または請求項3に記載の車両用運転操作補助装置において、
前記アクセルペダル反力算出手段は、所定の最小リスク度に対応する第1の反力指令値と所定の最大リスク度に対応する第2の反力指令値との間で、前記リスク度が大きくなるほど前記反力指令値が大きくなり、前記最大のリスク度を超えると前記反力指令値が前記第2の反力指令値よりも大きい第3の反力指令値まで不連続に増加するよう設定された第1の反力特性に従って前記反力指令値を算出し、
前記アクセルペダル反力調整手段は、前記所定の運転行動意図が検出された場合には、前記リスク度が前記最大のリスク度を上回る場合の反力指令値が前記第3の反力指令値よりも小さくなるように前記反力特性を補正することを特徴とする車両用運転操作補助装置。 - 請求項2または請求項3に記載の車両用運転操作補助装置において、
前記アクセルペダル反力算出手段は、所定の最小リスク度に対応する第1の反力指令値と所定の最大リスク度に対応する第2の反力指令値との間で、前記リスク度が大きくなるほど前記反力指令値が大きくなるよう設定された第2の反力特性に従って前記反力指令値を算出し、
前記アクセルペダル反力調整手段は、前記所定の運転行動意図が検出された場合には、前記第1の反力指令値と、前記第2の反力指令値よりも小さい第4の反力指令値との間で、前記リスク度が大きくなるほど前記反力指令値が大きくなるよう前記反力特性を補正することを特徴とする車両用運転操作補助装置。 - 請求項1に記載の車両用運転操作補助装置において、
前記アクセルペダル反力調整手段は、前記運転行動意図検出手段によって所定の運転行動意図が検出された場合に、前記リスク度算出手段で前記リスク度を算出する際に用いる、前記状況認識手段で検出される車両状態および車両周囲の走行環境に対する前記リスク度の特性を補正することを特徴とする車両用運転操作補助装置。 - 請求項6に記載の車両用運転操作補助装置において、
前記アクセルペダル反力調整手段は、前記所定の運転行動意図が検出された場合には、前記状況認識手段によって検出される車両状態および走行環境が同じであっても、前記所定の運転行動意図が検出されない場合に比べて前記リスク度が小さくなるように前記リスク度の特性を補正することを特徴とする車両用運転操作補助装置。 - 請求項6または請求項7に記載の車両用運転操作補助装置において、
前記リスク度算出手段は、前記状況認識手段で検出される車両状態および走行環境に基づく算出式を用いて前記リスク度を算出し、
前記アクセルペダル反力調整手段は、前記所定の運転行動意図が検出された場合には、前記状況認識手段によって検出される車両状態および走行環境が同じであっても、前記所定の運転行動意図が検出されない場合に比べて前記リスク度が小さくなるように前記算出式に所定の定数を乗じることを特徴とする車両用運転操作補助装置。 - 請求項1から請求項8のいずれかに記載の車両用運転操作補助装置において、前記運転行動意図検出手段で検出する運転行動意図は、車線変更意図であることを特徴とする車両用運転操作補助装置。
- 請求項9に記載の車両用運転操作補助装置において、
前記運転行動意図検出手段は、ウィンカーの操作状態を検出し、検出したウィンカーの操作状態に基づいて車線変更意図を検出することを特徴とする車両用運転操作補助装置。 - 請求項1から請求項10に記載の車両用運転操作補助装置において、
前記状況認識手段は、自車速と、前記自車両と先行車両との相対車速および車間距離とを検出し、
前記リスク度算出手段は、前記自車速と前記車間距離とに基づく車間時間と、前記相対車速と前記車間距離とに基づく余裕時間とを用いて前記リスク度を算出することを特徴とする車両用運転操作補助装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002179913A JP3838166B2 (ja) | 2002-06-20 | 2002-06-20 | 車両用運転操作補助装置 |
| EP03012899A EP1375280B1 (en) | 2002-06-20 | 2003-06-06 | Driving assist system and method for vehicle |
| US10/462,733 US6982647B2 (en) | 2002-06-20 | 2003-06-17 | Driving assist system for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002179913A JP3838166B2 (ja) | 2002-06-20 | 2002-06-20 | 車両用運転操作補助装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006114772A Division JP4483827B2 (ja) | 2006-04-18 | 2006-04-18 | 車両用運転操作補助装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004017930A true JP2004017930A (ja) | 2004-01-22 |
| JP3838166B2 JP3838166B2 (ja) | 2006-10-25 |
Family
ID=29717509
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002179913A Expired - Fee Related JP3838166B2 (ja) | 2002-06-20 | 2002-06-20 | 車両用運転操作補助装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6982647B2 (ja) |
| EP (1) | EP1375280B1 (ja) |
| JP (1) | JP3838166B2 (ja) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006137306A (ja) * | 2004-11-12 | 2006-06-01 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2006161671A (ja) * | 2004-12-07 | 2006-06-22 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2006168684A (ja) * | 2004-12-20 | 2006-06-29 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2006213276A (ja) * | 2005-02-07 | 2006-08-17 | Nissan Motor Co Ltd | 運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2006231944A (ja) * | 2005-02-22 | 2006-09-07 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2006281809A (ja) * | 2005-03-31 | 2006-10-19 | Hitachi Ltd | ペダル装置及びそれを備えた自動車 |
| JP2007076469A (ja) * | 2005-09-13 | 2007-03-29 | Toyota Motor Corp | 車両の制御装置 |
| US7634331B2 (en) | 2005-02-07 | 2009-12-15 | Nissan Motor Co., Ltd. | Driving intention estimation system, vehicle operation assistance system, and vehicle equipped therewith |
| US7715972B2 (en) | 2004-11-12 | 2010-05-11 | Nissan Motor Co., Ltd. | Driving assisting system for a vehicle and a vehicle installed with the system |
| US7726672B2 (en) | 2007-06-18 | 2010-06-01 | Nissan Motor Co., Ltd. | Vehicle body front part structure |
| JP2010247784A (ja) * | 2009-04-20 | 2010-11-04 | Honda Motor Co Ltd | 車両の衝突回避装置 |
| US7904246B2 (en) | 2005-08-05 | 2011-03-08 | Nissan Motor Co., Ltd. | Vehicle driving assist system |
| JP2012250674A (ja) * | 2011-06-06 | 2012-12-20 | Nissan Motor Co Ltd | 車両用加速抑制装置及び車両用加速抑制方法 |
| JP2014029604A (ja) * | 2012-07-31 | 2014-02-13 | Denso It Laboratory Inc | 移動体認識システム、移動体認識プログラム、及び移動体認識方法 |
| KR101470146B1 (ko) * | 2013-04-23 | 2014-12-05 | 현대자동차주식회사 | 가속페달 장치의 답력 능동 조절방법 |
| JP2016145016A (ja) * | 2015-02-09 | 2016-08-12 | 株式会社デンソー | 車間マネジメント装置及び車間マネジメント方法 |
| JP2017215962A (ja) * | 2016-05-31 | 2017-12-07 | 株式会社Soken | 運転支援装置、運転支援方法 |
| JP2022020161A (ja) * | 2020-07-20 | 2022-02-01 | 日立Astemo株式会社 | 車両制御システム |
Families Citing this family (71)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3531640B2 (ja) * | 2002-01-10 | 2004-05-31 | 日産自動車株式会社 | 車両用運転操作補助装置 |
| JP3896993B2 (ja) * | 2003-06-04 | 2007-03-22 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 |
| JP3982456B2 (ja) * | 2003-06-04 | 2007-09-26 | 日産自動車株式会社 | 車両用リスクポテンシャル算出装置、車両用運転操作補助装置、車両用運転操作補助装置を備える車両およびリスクポテンシャル算出方法 |
| JP2005067531A (ja) * | 2003-08-27 | 2005-03-17 | Denso Corp | 車両用空調装置 |
| JP4239771B2 (ja) * | 2003-09-18 | 2009-03-18 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP4487534B2 (ja) * | 2003-10-23 | 2010-06-23 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP4226455B2 (ja) | 2003-12-16 | 2009-02-18 | 日産自動車株式会社 | 運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP4561092B2 (ja) * | 2003-12-16 | 2010-10-13 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP4281543B2 (ja) | 2003-12-16 | 2009-06-17 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP3956948B2 (ja) | 2004-03-11 | 2007-08-08 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 |
| JP4313243B2 (ja) | 2004-04-26 | 2009-08-12 | 豊田鉄工株式会社 | 車両用電気式操作装置 |
| JP4229051B2 (ja) * | 2004-11-26 | 2009-02-25 | 日産自動車株式会社 | 運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP4735310B2 (ja) * | 2005-04-15 | 2011-07-27 | 株式会社デンソー | 走行支援装置 |
| JP4867561B2 (ja) * | 2005-12-22 | 2012-02-01 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP4582052B2 (ja) * | 2006-06-07 | 2010-11-17 | トヨタ自動車株式会社 | 走行支援装置 |
| JP2007326491A (ja) * | 2006-06-08 | 2007-12-20 | Toyota Motor Corp | 車両用入力装置 |
| US8065044B2 (en) * | 2006-07-31 | 2011-11-22 | The University Of Liverpool | Vehicle guidance system |
| WO2008020071A2 (de) * | 2006-08-18 | 2008-02-21 | Continental Teves Ag & Co. Ohg | Ansteuerung von sicherheitsmitteln eines kraftfahrzeugs |
| EP2054281B1 (de) | 2006-08-18 | 2013-12-25 | Continental Teves AG & Co. oHG | Ansteuerung von sicherheitsmitteln eines kraftfahrzeugs |
| KR100844561B1 (ko) * | 2006-12-08 | 2008-07-08 | 현대자동차주식회사 | 가속 페달 시스템 |
| JP2008191781A (ja) * | 2007-02-01 | 2008-08-21 | Hitachi Ltd | 衝突回避システム |
| EP2052936B1 (en) | 2007-10-23 | 2012-02-29 | Nissan Motor Co., Ltd. | Headway distance maintenance assisting system and method |
| US20100019964A1 (en) * | 2008-07-24 | 2010-01-28 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition and road condition recognition |
| US8280601B2 (en) * | 2008-07-24 | 2012-10-02 | GM Global Technology Operations LLC | Adaptive vehicle control system with integrated maneuver-based driving style recognition |
| US8170740B2 (en) * | 2008-07-24 | 2012-05-01 | GM Global Technology Operations LLC | Adaptive vehicle control system with driving style recognition based on vehicle launching |
| US8260515B2 (en) * | 2008-07-24 | 2012-09-04 | GM Global Technology Operations LLC | Adaptive vehicle control system with driving style recognition |
| US20100019880A1 (en) * | 2008-07-24 | 2010-01-28 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on traffic sensing |
| US8060260B2 (en) | 2008-07-24 | 2011-11-15 | GM Global Technology Operations LLC | Adaptive vehicle control system with driving style recognition based on vehicle passing maneuvers |
| US7831407B2 (en) * | 2008-07-24 | 2010-11-09 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on vehicle U-turn maneuvers |
| US8195341B2 (en) * | 2008-07-24 | 2012-06-05 | GM Global Technology Operations LLC | Adaptive vehicle control system with driving style recognition based on maneuvers at highway on/off ramps |
| US20100023197A1 (en) * | 2008-07-24 | 2010-01-28 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on behavioral diagnosis |
| US20100023265A1 (en) * | 2008-07-24 | 2010-01-28 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with integrated driving style recognition |
| US20100023180A1 (en) * | 2008-07-24 | 2010-01-28 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on lane-change maneuvers |
| US8280560B2 (en) * | 2008-07-24 | 2012-10-02 | GM Global Technology Operations LLC | Adaptive vehicle control system with driving style recognition based on headway distance |
| JP5381321B2 (ja) * | 2008-07-31 | 2014-01-08 | 日産自動車株式会社 | アクセルペダル踏力制御装置 |
| JP5278162B2 (ja) * | 2008-07-31 | 2013-09-04 | 日産自動車株式会社 | アクセルペダル踏力制御装置 |
| US20100152950A1 (en) * | 2008-12-15 | 2010-06-17 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on vehicle stopping |
| US20100152951A1 (en) * | 2008-12-15 | 2010-06-17 | Gm Global Technology Operations, Inc. | Adaptive vehicle control system with driving style recognition based on vehicle accelerating and decelerating |
| US20100209887A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operation, Inc. | Vehicle stability enhancement control adaptation to driving skill based on vehicle backup maneuver |
| US20100209884A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on vehicle left and right turns |
| US20100209891A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on stop-and-go driving behavior |
| US20100209881A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on behavioral diagnosis |
| US20100209886A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on u-turn performance |
| US20100209889A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill based on multiple types of maneuvers |
| US8170725B2 (en) * | 2009-02-18 | 2012-05-01 | GM Global Technology Operations LLC | Vehicle stability enhancement control adaptation to driving skill based on highway on/off ramp maneuver |
| US20100209890A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill with integrated driving skill recognition |
| US20100209885A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill based on lane change maneuver |
| US20100209888A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill based on curve-handling maneuvers |
| US20100209883A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill based on passing maneuver |
| US20100209882A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on straight-line driving behavior |
| US20100209892A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Driving skill recognition based on manual transmission shift behavior |
| JP2010221995A (ja) * | 2009-02-27 | 2010-10-07 | Nissan Motor Co Ltd | 車両用運転操作補助装置、車両用運転操作補助方法および自動車 |
| JP5381160B2 (ja) * | 2009-02-27 | 2014-01-08 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助方法 |
| JP2010221993A (ja) * | 2009-02-27 | 2010-10-07 | Nissan Motor Co Ltd | 車両用運転操作補助装置、車両用運転操作補助方法および自動車 |
| JP5526717B2 (ja) * | 2009-02-27 | 2014-06-18 | 日産自動車株式会社 | 車両用運転操作補助装置、車両用運転操作補助方法および自動車 |
| US8155868B1 (en) * | 2009-03-31 | 2012-04-10 | Toyota Infotechnology Center Co., Ltd. | Managing vehicle efficiency |
| JP5310745B2 (ja) * | 2009-04-21 | 2013-10-09 | トヨタ自動車株式会社 | 走行支援装置 |
| DE102009021587A1 (de) * | 2009-05-15 | 2010-11-25 | Conti Temic Microelectronic Gmbh | Verfahren und Vorrichtung zur Geschwindigkeitsregelung |
| US8712661B2 (en) * | 2010-01-28 | 2014-04-29 | Nissan Motor Co., Ltd. | Device to control force required to depress accelerator pedal |
| EP2560151B1 (en) * | 2010-04-16 | 2016-09-14 | Toyota Jidosha Kabushiki Kaisha | Driving support device |
| WO2012039181A1 (ja) * | 2010-09-21 | 2012-03-29 | 本田技研工業株式会社 | 車両用アクセルペダル装置及びペダル反力制御方法 |
| WO2014057309A1 (en) * | 2012-10-10 | 2014-04-17 | Freescale Semiconductor, Inc. | Method and apparatus for determining a risk level in manually operated systems |
| KR101428250B1 (ko) * | 2012-12-06 | 2014-08-07 | 현대자동차주식회사 | 차량용 가속페달의 킥 다운 제어장치 및 방법 |
| KR102130941B1 (ko) * | 2013-07-26 | 2020-07-07 | 현대모비스 주식회사 | 차량 가속도 지원 장치 및 방법 |
| CN104044458A (zh) * | 2014-05-27 | 2014-09-17 | 南京通用电器有限公司 | 一种紧急情况下使加速踏板失效的系统 |
| JP6094530B2 (ja) | 2014-05-30 | 2017-03-15 | 株式会社デンソー | 運転支援装置および運転支援プログラム |
| JP6103716B2 (ja) * | 2014-06-17 | 2017-03-29 | 富士重工業株式会社 | 車両の走行制御装置 |
| KR102278387B1 (ko) * | 2015-07-07 | 2021-07-16 | 주식회사 만도 | 거리 산출 장치, 거리 산출 방법, 운전 지원 장치 및 운전 지원 시스템 |
| CN108437794B (zh) * | 2018-03-20 | 2021-07-06 | 重庆电讯职业学院 | 一种汽车限速系统 |
| US10723362B2 (en) * | 2018-06-05 | 2020-07-28 | Denso International America, Inc. | Driver assistance system operating based on autonomous statuses of host and local vehicles while in a multi-level autonomous environment |
| CN109050527B (zh) * | 2018-07-25 | 2020-04-10 | 浙江中科正方电子技术有限公司 | 车辆碰撞侦测系统 |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5913178Y2 (ja) | 1980-01-25 | 1984-04-19 | 日産車体株式会社 | 自動車用吊下げ式ペダル |
| JPS5733048A (en) | 1980-08-04 | 1982-02-23 | Honda Motor Co Ltd | Throttle reaction control device of car |
| JPS57167845A (en) | 1981-04-07 | 1982-10-15 | Honda Motor Co Ltd | Vehicle throttle reaction force control system |
| JPH035937Y2 (ja) | 1985-09-20 | 1991-02-15 | ||
| JPS63258225A (ja) | 1987-04-16 | 1988-10-25 | Showa Denko Kk | 合成樹脂製アクセルペダル |
| JP2871717B2 (ja) | 1989-05-01 | 1999-03-17 | マツダ株式会社 | 移動車の走行制御装置 |
| JP2658467B2 (ja) | 1990-01-22 | 1997-09-30 | 日産自動車株式会社 | アクセル反力制御装置 |
| JPH05231194A (ja) | 1992-02-26 | 1993-09-07 | Nippondenso Co Ltd | アクセルペダルの踏込反力制御装置 |
| JPH05345536A (ja) | 1992-06-15 | 1993-12-27 | Toyota Autom Loom Works Ltd | 産業車両のアクセル装置 |
| JPH074211U (ja) | 1993-06-16 | 1995-01-20 | 日産ディーゼル工業株式会社 | 車両の追突防止装置 |
| JPH0817000A (ja) | 1994-06-28 | 1996-01-19 | Toyota Motor Corp | 車間距離制御装置 |
| JPH08166448A (ja) | 1994-12-13 | 1996-06-25 | Honda Motor Co Ltd | 車両用周囲監視装置 |
| DE19506629A1 (de) | 1995-02-25 | 1996-08-29 | Pierburg Gmbh | Fahrpedalanordnung für Fahrzeug-Brennkraftmaschinen |
| JP3634436B2 (ja) | 1995-03-27 | 2005-03-30 | 三菱プレシジョン株式会社 | 模擬運転装置用クラッチペダル反力発生装置、模擬運転装置用ブレーキペダル反力発生装置及び模擬運転装置用ペダル反力発生装置 |
| JPH09254677A (ja) | 1996-03-21 | 1997-09-30 | Hiruta Kogyo Kk | アクセルペダル |
| DE19620929A1 (de) * | 1996-05-24 | 1997-11-27 | Porsche Ag | Längsregelsystem für Kraftfahrzeuge mit haptischem Gaspedal |
| JPH10166890A (ja) | 1996-12-04 | 1998-06-23 | Suzuki Motor Corp | 警報装置 |
| JPH10166889A (ja) | 1996-12-04 | 1998-06-23 | Suzuki Motor Corp | 警報装置 |
| DE19702554B4 (de) * | 1997-01-24 | 2004-04-15 | Siemens Ag | Antriebssteuerung für ein Kraftfahrzeug |
| JPH10318009A (ja) | 1997-05-16 | 1998-12-02 | Mitsubishi Electric Corp | 車両用追従走行制御装置 |
| JP3209406B2 (ja) | 1997-06-06 | 2001-09-17 | 本田技研工業株式会社 | 車両用運転支援装置 |
| JP2000054860A (ja) | 1998-08-10 | 2000-02-22 | Denso Corp | 自動走行制御装置及びペダル反力調整器並びに記録媒体 |
| JP2000158970A (ja) | 1998-11-30 | 2000-06-13 | Toyota Autom Loom Works Ltd | アクセルペダル反力制御装置 |
| DE19916434B4 (de) | 1999-04-12 | 2006-04-06 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Elektromechanisch angetriebenes schwenkbares Pedal |
| JP2000296724A (ja) | 1999-04-14 | 2000-10-24 | Fujitsu Ten Ltd | 車間制御装置 |
| JP3738613B2 (ja) | 1999-08-10 | 2006-01-25 | 日産自動車株式会社 | 車線追従装置 |
| JP2001171497A (ja) | 1999-12-17 | 2001-06-26 | Nissan Motor Co Ltd | 車両用衝突防止装置 |
| ITTO20010282A1 (it) * | 2001-03-26 | 2002-09-26 | Fiat Ricerche | Sistema di ausilio alla guida di un autoveicolo. |
| JP2002331850A (ja) | 2001-05-07 | 2002-11-19 | Nissan Motor Co Ltd | 運転行動意図検出装置 |
| US6879896B2 (en) * | 2002-04-11 | 2005-04-12 | Delphi Technologies, Inc. | System and method for using vehicle operator intent to adjust vehicle control system response |
-
2002
- 2002-06-20 JP JP2002179913A patent/JP3838166B2/ja not_active Expired - Fee Related
-
2003
- 2003-06-06 EP EP03012899A patent/EP1375280B1/en not_active Expired - Lifetime
- 2003-06-17 US US10/462,733 patent/US6982647B2/en not_active Expired - Fee Related
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4622465B2 (ja) * | 2004-11-12 | 2011-02-02 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2006137306A (ja) * | 2004-11-12 | 2006-06-01 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| US7715972B2 (en) | 2004-11-12 | 2010-05-11 | Nissan Motor Co., Ltd. | Driving assisting system for a vehicle and a vehicle installed with the system |
| JP2006161671A (ja) * | 2004-12-07 | 2006-06-22 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP4543908B2 (ja) * | 2004-12-07 | 2010-09-15 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2006168684A (ja) * | 2004-12-20 | 2006-06-29 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2006213276A (ja) * | 2005-02-07 | 2006-08-17 | Nissan Motor Co Ltd | 運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| US7634331B2 (en) | 2005-02-07 | 2009-12-15 | Nissan Motor Co., Ltd. | Driving intention estimation system, vehicle operation assistance system, and vehicle equipped therewith |
| JP2006231944A (ja) * | 2005-02-22 | 2006-09-07 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2006281809A (ja) * | 2005-03-31 | 2006-10-19 | Hitachi Ltd | ペダル装置及びそれを備えた自動車 |
| US7904246B2 (en) | 2005-08-05 | 2011-03-08 | Nissan Motor Co., Ltd. | Vehicle driving assist system |
| JP2007076469A (ja) * | 2005-09-13 | 2007-03-29 | Toyota Motor Corp | 車両の制御装置 |
| JP4645378B2 (ja) * | 2005-09-13 | 2011-03-09 | トヨタ自動車株式会社 | 車両の制御装置 |
| US7726672B2 (en) | 2007-06-18 | 2010-06-01 | Nissan Motor Co., Ltd. | Vehicle body front part structure |
| JP2010247784A (ja) * | 2009-04-20 | 2010-11-04 | Honda Motor Co Ltd | 車両の衝突回避装置 |
| JP2012250674A (ja) * | 2011-06-06 | 2012-12-20 | Nissan Motor Co Ltd | 車両用加速抑制装置及び車両用加速抑制方法 |
| US9824586B2 (en) | 2012-07-31 | 2017-11-21 | Denso It Laboratory, Inc. | Moving object recognition systems, moving object recognition programs, and moving object recognition methods |
| JP2014029604A (ja) * | 2012-07-31 | 2014-02-13 | Denso It Laboratory Inc | 移動体認識システム、移動体認識プログラム、及び移動体認識方法 |
| KR101470146B1 (ko) * | 2013-04-23 | 2014-12-05 | 현대자동차주식회사 | 가속페달 장치의 답력 능동 조절방법 |
| US9104228B2 (en) | 2013-04-23 | 2015-08-11 | Hyundai Motor Company | Active control method of accelerator pedal effort |
| JP2016145016A (ja) * | 2015-02-09 | 2016-08-12 | 株式会社デンソー | 車間マネジメント装置及び車間マネジメント方法 |
| WO2016129231A1 (ja) * | 2015-02-09 | 2016-08-18 | 株式会社デンソー | 車間マネジメント装置及び車間マネジメント方法 |
| US10535268B2 (en) | 2015-02-09 | 2020-01-14 | Denson Corporation | Inter-vehicle management apparatus and inter-vehicle management method |
| JP2017215962A (ja) * | 2016-05-31 | 2017-12-07 | 株式会社Soken | 運転支援装置、運転支援方法 |
| JP2022020161A (ja) * | 2020-07-20 | 2022-02-01 | 日立Astemo株式会社 | 車両制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1375280B1 (en) | 2011-08-17 |
| EP1375280A3 (en) | 2008-12-10 |
| EP1375280A2 (en) | 2004-01-02 |
| JP3838166B2 (ja) | 2006-10-25 |
| US20030236602A1 (en) | 2003-12-25 |
| US6982647B2 (en) | 2006-01-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3838166B2 (ja) | 車両用運転操作補助装置 | |
| JP4419531B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 | |
| JP3573134B2 (ja) | 車両用運転操作補助装置 | |
| JP4281543B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4229051B2 (ja) | 運転意図推定装置、車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP3531640B2 (ja) | 車両用運転操作補助装置 | |
| JP3873876B2 (ja) | 車両用運転操作補助装置およびその装置を備えた車両 | |
| WO2017159792A1 (ja) | 走行支援装置 | |
| JP2004017847A (ja) | 車両用運転操作補助装置 | |
| JP4367319B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP3991915B2 (ja) | 車両用運転操作補助装置およびその装置を備えた車両 | |
| JP4367254B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP3956948B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 | |
| JP2004249846A (ja) | 車両用運転操作補助装置およびその装置を備えた車両 | |
| JP4114470B2 (ja) | 車両用運転操作補助装置およびその装置を備えた車両 | |
| JP4483827B2 (ja) | 車両用運転操作補助装置 | |
| JP4055721B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4063283B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP2006143009A (ja) | 車両の運転支援装置 | |
| JP3903913B2 (ja) | 車両用運転操作補助装置およびその装置を備えた車両 | |
| JP4622465B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP2005008147A (ja) | 車両用運転操作補助装置 | |
| JP4079074B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 | |
| JP4124030B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 | |
| JP4367180B2 (ja) | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20040513 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20040518 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20040714 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050301 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050421 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060221 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060418 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060711 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060724 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090811 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100811 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110811 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120811 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120811 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130811 Year of fee payment: 7 |
|
| LAPS | Cancellation because of no payment of annual fees |