-
Die vorliegende Anmeldung beansprucht die Priorität der
KR20110132819 eingereicht am 12. Dezember 2011, deren gesamter Inhalt für alle Zwecke durch diese Bezugnahme hierin einbezogen ist.
-
Die vorliegende Erfindung bezieht sich auf ein aktives Wankstabilisierungssystem (oder auch aktives Wankregelsystem oder Wanksteuersystem) für ein Fahrzeug (z. B. ein Kraftfahrzeug). Insbesondere bezieht sich die vorliegende Erfindung auf ein aktives Wankstabilisierungssystem (ARCS), welches aktiv das Wanken einer Stabilisatorstange (bzw. eines Stabilisators) steuern (bzw. regeln) kann, die mit einem Paar von oberen Armen (bzw. Aufhängungsarmen bzw. Lenkern, z. B. Querlenkern) verbunden ist, die an beiden Seiten eines Fahrzeugaufbaus (bzw. Fahrzeugkörpers bzw. Karosserie) mittels jeweils eines Stabilisatorverbindungselements (z. B. einer Stabilisatorkoppelstange oder eines Stabilisatorlenkers) montiert sind.
-
Bekannt sind folgende Vorrichtungen: aus der
US 4 714 271 A z. B. eine Radaufhängung-Steuerungsvorrichtung (
18A–
18C) und aus der
DE 103 32 919 A1 z. B. eine Stabilisatorvorrichtung eines Fahrzeugs (
1), wobei die bekannten Vorrichtungen eingerichtet sind, um eine Wanksteifigkeit eines Fahrzeugs mittels Einstellens einer Montageposition eines Stabilisatorverbindungselements, das einen Aufhängungsarm mit einer Stabilisatorstange des Fahrzeugs verbindet, an dem Aufhängungsarm gemäß einem Fahrzustand des Fahrzeugs aktiv zu steuern. Aus der
JP H06-50 332 A ist z. B. eine Linearführungsvorrichtung bekannt. Im Allgemeinen verbindet ein Aufhängungssystem eines Fahrzeugs eine Achse (z. B. Fahrzeugachse) mit einem Fahrzeugaufbau, so dass Vibrationen oder Stöße gesteuert werden, welche während der Fahrt von einer Straße auf die Achse übertragen werden, damit sie nicht direkt auf den Fahrzeugaufbau übertragen werden. Dementsprechend verhindert das Aufhängungssystem eines Fahrzeugs Schäden am Fahrzeugaufbau bzw. an einer Fracht und verbessert den Fahrkomfort.
-
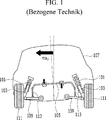
Solch ein Aufhängungssystem, wie in 1 gezeigt, weist auf: eine Fahrwerksfeder (bzw. Chassisfeder) 101, welche Stöße von der Straße verringert, einen Stoßdämpfer 103, welcher die freie Schwingung der Fahrwerksfeder 101 reduziert (bzw. dämpft) und den Fahrkomfort verbessert, und eine Stabilisatorstange 105 (bzw. einen Stabilisator), welche das Wanken eines Fahrzeugs unterdrückt (Wanken bedeutet in diesem Zusammenhang das Neigen bzw. Schrägstellen des Fahrzeugs mit Bezug auf eine Längsachse des Fahrzeugaufbaus).
-
Hierbei weist die Stabilisatorstange 105 einen geraden Abschnitt und zwei Enden auf. Beide Seiten des geraden Abschnitts sind am Fahrzeugaufbau 107 montiert, und die beiden Enden sind an einem unteren Arm 109 (bzw. einem unteren Lenker, z. B. Querlenker) oder einer Druckstrebe (bzw. Federbein), der ein Aufhängungsarm ist, mittels des Stabilisatorverbindungselements 113 (z. B. der Stabilisatorkoppelstange oder des Stabilisatorlenkers) montiert. Daher, wenn ein linkes und ein rechtes Rad 111 sich in die gleiche Richtung (nach oben oder nach unten) bewegen, arbeitet die Stabilisatorstange 105 nicht. Wenn jedoch das linke und das rechte Rad 111 sich in die entgegengesetzten Richtungen bewegen (eines bewegt sich nach oben und eines nach unten) wird die Stabilisatorstange 105 verdreht, und sie unterdrückt das Wanken des Fahrzeugaufbaus 107 mittels einer Torsionsrückstellkraft.
-
Das heißt: wenn der Fahrzeugaufbau 107 sich neigt in Richtung zu einer Abbiegungsachse (bzw. Kurvenachse bzw. Kurvenmittelpunkt) aufgrund von einer Zentrifugalkraft im Falle von einer Abbiegung (bzw. Richtungsänderung bzw. Kurvenfahrt) oder im Falle von unterschiedlichen Höhen des linken und des rechten Rades aufgrund von einer Bodenwelle oder einer Ausfederung des Fahrzeugs, verdreht sich die Stabilisatorstange 105 und stabilisiert die Position des Fahrzeugaufbaus mittels einer Torsionsrückstellkraft.
-
Da eine konventionelle Stabilisatorstange 105 allerdings eine konstante Wanksteifigkeit (bzw. Wankstabilität) aufweist, ist es unzureichend, die Stabilität beim Abbiegen (bzw. Kurvenfahrt bzw. Lenken) unter verschiedenen Fahrzuständen mittels der Torsionsfederkraft der Stabilisatorstange 105 allein zu sichern.
-
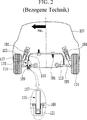
In letzter Zeit ist ein aktives Wankstabilisierungssystem entwickelt worden, das einen Aktuator aufweist, welcher einen Hydraulikdruckzylinder 115 aufweist und mit einem Ende der Stabilisatorstange 105 verbunden ist, um das Wanken aktiv zu steuern (bzw. zu regeln), wie in 2 gezeigt.
-
Das aktive Wankstabilisierungssystem nutzt den Hydraulikdruckzylinder 115 anstelle des Stabilisatorverbindungselements 113, das den unteren Arm 109 und das Ende der Stabilisatorstange 105 miteinander verbindet, um eine Verbindungslänge zwischen dem Ende der Stabilisatorstange 105 und dem unteren Arm 109 zu verändern. Dadurch wird die Wanksteifigkeit der Stabilisatorstange 105 verändert.
-
Das heißt: gemäß dem aktiven Wankstabilisierungssystem ist ein unteres Ende des Hydraulikdruckzylinders 115 verbunden mit dem unteren Arm 109, und ein vorderes (bzw. oberes) Ende einer Kolbenstange 117 des Hydraulikdruckzylinders 115 ist mittels eines Kugelgelenks 119 mit dem Ende der Stabilisatorstange 105 verbunden.
-
Gemäß dem aktiven Wankstabilisierungssystem steuert (bzw. regelt) eine elektronische Steuereinheit (ECU) ein Hydraulikdrucksystem, das aufweist Ventile, Hydraulikdruckpumpen usw., basierend auf Signalen, die ausgegeben werden von einem Beschleunigungssensor, einem Höhensensor und einem Lenksensor (oder Lenkwinkelsensor) des Fahrzeugs, um das Wankverhalten des Fahrzeugs zu verbessern.
-
Allerdings sollte das untere Ende des Hydraulikdruckzylinders 115 mittels einer separaten Halterung 121 montiert werden, die aufweist ein unteres Ende, welches unter den unteren Arm 109 vorsteht, um so einen Betriebshub (bzw. Arbeitshub) des Hydraulikdruckzylinders 115 (d. h. des Aktuators) bis zum Maximum zu gewährleisten. Ein solches Layout kann zwar entworfen werden, allerdings kann die Produktivität dadurch verschlechtert werden.
-
Da der Hydraulikdruckzylinder 115 verwendet wird als der Aktuator, müssen Komponenten zum Erzeugen und Liefern eines Hydraulikdrucks (d. h. Hydraulikdruckpumpen, -leitungen, Ventile usw.) vorgesehen werden.
-
Die hier im Zusammenhang mit dem Hintergrund der Erfindung offenbarten Informationen sollen lediglich dem besseren Verständnis des allgemeinen Hintergrunds der Erfindung dienen und sollen nicht als eine Anerkennung oder irgendeine Form von Hinweis verstanden werden, dass diese Informationen einen dem Fachmann bereits bekannten Stand der Technik darstellen.
-
Es ist eine Aufgabe der vorliegenden Erfindung, ein aktives Wankstabilisierungssystem bereitzustellen, das vorteilhaft ist bei der aktiven Steuerung (bzw. Regelung) einer Wanksteifigkeit eines Fahrzeugs, indem eine Montageposition (oder Abstützposition) eines Stabilisatorverbindungselements an einem Aufhängungsarm gesteuert wird mittels einer Antriebseinheit, die an einem unteren Abschnitt des Aufhängungsarms angeordnet ist und von einem Elektromotor angetrieben wird, um so ein Hebelverhältnis (bzw. eine Hebelübersetzung) des Stabilisatorverbindungselements zu verändern.
-
Verschiedene Aspekte der vorliegenden Erfindung stellen bereit ein aktives Wankstabilisierungssystem, das in einfacher Weise gesteuert (bzw. geregelt) werden kann und ein handliches Layout hat, wenn es an einen Aufhängungsarm montiert wird.
-
Verschiedene Aspekte der vorliegenden Erfindung stellen bereit ein aktives Wankstabilisierungssystem, welches einen Versatz (bzw. Offset) zwischen einem Stabilisatorverbindungselement sowie einem Aufhängungsarm und Effekte eines Torsionsmoments unter Verwendung eines Verbindungselements, das mittels eines Wälzlagers (z. B. Rollenlagers) geführt wird, minimiert.
-
Verschiedene Aspekte der vorliegenden Erfindung stellen bereit ein aktives Wankstabilisierungssystem, welches eingerichtet ist, um aktiv eine Wanksteifigkeit eines Fahrzeugs mittels Einstellens einer Montageposition eines Stabilisatorverbindungselements, das einen Aufhängungsarm mit einer Stabilisatorstange des Fahrzeugs verbindet, an dem Aufhängungsarm gemäß einem Fahrzustand des Fahrzeugs zu steuern.
-
Das aktive Wankstabilisierungssystem kann aufweisen: eine Schienenplatte (bzw. Gleitplatte), welche in einem Raum, der zu einer Richtung hin geöffnet ist, montiert ist, wobei der Raum mittels Biegens eines mittleren Abschnitts des Aufhängungsarms geformt ist; ein Verbindungselement, welches aufweist ein Gewindeloch (bzw. Schraubenloch), das an einem Mittelabschnitt davon geformt ist, und ein Verbindungsende, welches an einer Seitenfläche davon geformt ist und mit einem Ende des Stabilisatorverbindungselements verbunden ist, wobei ein oberer und ein unterer Abschnitt des Verbindungselements an der Schienenplatte montiert sind, um entlang der Schienenplatte bewegbar zu sein; einen Antriebsmotor (z. B. Elektromotor), welcher an ein inneres Ende des Aufhängungsarms gekoppelt ist und mit einem Drehschaft versehen ist, der ein Gewinde- bzw. Schraubenschaft ist, wobei der Drehschaft mit dem Gewindeloch im Eingriff ist, so dass das Verbindungselement entlang der Schienenplatte bewegbar ist; und eine Abdeckung, welche mit dem Aufhängungsarm im Eingriff ist, um in einem Zustand der Kopplung mit der Schienenplatte den Raum abzudecken, und einen Schlitz aufweist, der an einer unteren Fläche davon geformt ist, wobei das Stabilisatorverbindungselement in den Schlitz eingesetzt und entlang des Schlitzes bewegbar ist.
-
Das aktive Wankstabilisierungssystem kann ferner aufweisen Wälzlager (z. B. Rollenlager), welche an dem oberen und dem unteren Abschnitt der Schienenplatte montiert sind.
-
Der Aufhängungsarm kann ein oberer Arm sein, welcher drehbar mit einem Hilfsrahmen und einem Achsschenkelgelenk (bzw. Achsschenkel) des Fahrzeugs verbunden ist.
-
Eine obere und eine untere Fläche der Schienenplatte können miteinander mittels eines Seitenelements (bzw. einer Seite) davon verbunden sein, so dass die Wälzlager des Verbindungselements mittels der oberen und der unteren Fläche der Schienenplatte verschiebbar (bzw. gleitbar) gestützt (bzw. getragen) sind.
-
Das Seitenelement der Schienenplatte kann mittels eines Bolzens an eine Seite des Aufhängungsarms montiert (bzw. gebaut bzw. befestigt) sein.
-
Ein Paar von Wälzlagern kann an dem oberen Abschnitt des Verbindungselements und ein Paar von Wälzlagern kann an dem unteren Abschnitt des Verbindungselements montiert sein.
-
Ein oberes Ende des Stabilisatorverbindungselements kann drehbar an das Verbindungsende des Verbindungselements montiert (bzw. gebaut) sein.
-
Ein vorderes Ende des Drehschafts kann drehbar gestützt (bzw. gelagert) sein mittels eines Lagers, welches in ein äußeres Ende des Aufhängungsarms eingepresst ist.
-
Der Antriebsmotor kann ein Servomotor sein, dessen Drehzahl und Drehrichtung gesteuert werden können.
-
Der Antriebsmotor kann an das innere Ende des Aufhängungsarms mit einem Abstandshalter montiert sein, welcher dort zwischen angeordnet ist.
-
Einrastnuten können an der oberen und der unteren Fläche der Schienenplatte geformt sein, und Einrastvorsprünge, welche in die Einrastnuten eingesetzt sind, können an einer oberen und einer unteren Fläche der Abdeckung geformt sein.
-
Die Abdeckung kann mittels Bolzen an einen äußeren und einen inneren Endabschnitt der Öffnung des Aufhängungsarms montiert sein.
-
Die Verfahren und Vorrichtungen der vorliegenden Erfindung haben weitere Merkmale und Vorteile, wie im Detail aus den angehängten Zeichnungen, die hierin einbezogen sind, und den folgenden näheren Beschreibungen sichtbar werden, die zusammen zur Erläuterung gewisser Prinzipien der vorliegenden Erfindung dienen.
-
1 ist eine schematische Abbildung eines konventionellen Aufhängungssystems für ein Fahrzeug.
-
2 ist eine schematische Abbildung eines Aufhängungssystems für ein Fahrzeug, auf das ein aktives Wankstabilisierungssystem für das Fahrzeug gemäß der konventionellen Technik angewandt worden ist.
-
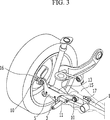
3 ist eine perspektivische Ansicht eines beispielhaften aktiven Wankstabilisierungssystems gemäß der vorliegenden Erfindung.
-
4 ist eine Vorderansicht eines beispielhaften aktiven Wankstabilisierungssystems gemäß der vorliegenden Erfindung.
-
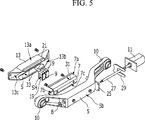
5 ist eine perspektivische Explosionsansicht eines beispielhaften aktiven Wankstabilisierungssystems gemäß der vorliegenden Erfindung.
-
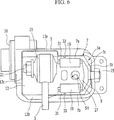
6 ist eine Querschnittansicht eines beispielhaften aktiven Wankstabilisierungssystems gemäß der vorliegenden Erfindung.
-
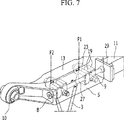
7 ist eine schematische Abbildung, die einen Betrieb eines beispielhaften aktiven Wankstabilisierungssystems gemäß der vorliegenden Erfindung zeigt.
-
Es wird nun im Detail Bezug genommen auf die verschiedenen Ausführungsformen der vorliegenden Erfindung, von denen Beispiele in den beiliegenden Zeichnungen dargestellt sind. Während die Erfindung im Zusammenhang mit den Ausführungsbeispielen beschrieben wird, versteht sich, dass die vorliegende Beschreibung nicht beabsichtigt, die Erfindungen auf diese beispielhafte Ausführungsformen zu beschränken. Auf der anderen Seite ist beabsichtigt, dass die Erfindung nicht nur die beispielhaften Ausführungsformen, sondern auch verschiedene Alternativen, Modifikationen, Äquivalente und andere Ausführungsformen decken, die in den Sinn und Schutzbereich der Erfindung fallen, wie in den angehängten Patentansprüchen definiert.
-
Eine Beschreibung von Komponenten, die nicht zur klaren Erläuterung der vorliegenden Erfindung erforderlich sind, wird ausgelassen.
-
Zwecks besserer Erläuterung verschiedener Ausführungsformen der vorliegenden Erfindung wird in 3 die linke Seite als eine äußere Seite und die rechte Seite als eine innere Seite bezeichnet.
-
3 ist eine perspektivische Ansicht eines aktiven Wankstabilisierungssystems gemäß verschiedenen Ausführungsformen der vorliegenden Erfindung. 4 ist eine Vorderansicht eines aktiven Wankstabilisierungssystems gemäß verschiedenen Ausführungsformen der vorliegenden Erfindung. 5 ist eine perspektivische Explosionsansicht eines aktiven Wankstabilisierungssystems gemäß verschiedenen Ausführungsformen der vorliegenden Erfindung.
-
Bezugnehmend auf 3 bis 5 ist ein aktives Wankstabilisierungssystem angepasst, das Wankverhalten eines Fahrzeugs aktiv zu verbessern, indem eine Wanksteifigkeit einer Stabilisatorstange 1 gemäß einem Fahrzustand des Fahrzeugs verändert wird.
-
Das aktive Wankstabilisierungssystem weist auf: die Stabilisatorstange 1, ein Stabilisatorverbindungselement 3, eine Schienenplatte 7, ein Verbindungselement 9, einen Antriebsmotor 11 und eine Abdeckung 13, die an einem oberen Arm 5 angeordnet sind, welcher ein Aufhängungsarm (bzw. -lenker) ist.
-
Ein seitlicher Abschnitt der Stabilisatorstange 1 ist an einem Hilfsrahmen 15 eines Fahrzeugaufbaus mittels einer Montagehülse 17 montiert.
-
Zusätzlich ist ein unteres Ende des Stabilisatorverbindungselements 3 mittels eines Kugelgelenks BJ mit einem Ende der Stabilisatorstange 1 verbunden.
-
Bezugnehmend auf 6 ist ein mittlerer Abschnitt des oberen Arms 5, welcher der Aufhängungsarm ist, gebogen, so dass ein Raum 5a, welcher zu einer Richtung hin geöffnet ist, an dem mittleren Abschnitt geformt wird. Beide Enden des oberen Arms 5 sind mittels Hülsen bzw. Buchsen 10 mit dem Hilfsrahmen 15 und einem Achsschenkelgelenk 16 verbunden.
-
Zusätzlich ist die Schienenplatte 7 durch eine Öffnung des oberen Arms 5 in dem Raum 5a montiert.
-
Solche Schienenplatte 7 weist eine „C”-Form auf, wobei eine obere Fläche 7a und eine untere Fläche 7b mittels eines Seitenelements bzw. einer Seite 7c miteinander verbunden sind.
-
Ferner ist das Seitenelement 7c der Schienenplatte 7 mittels eines Bolzens mit einer Seite 5b des oberen Arms 5 im Eingriff.
-
Ferner ist ein Gewindeloch SH an einem Mittelabschnitt des Verbindungselements 9 geformt. Wälzlager 19 sind an einem oberen und einem unteren Abschnitt des Verbindungselements 9 geformt, so dass das Verbindungselement 9 mittels der oberen Fläche 7a und der unteren Fläche 7b der Schienenplatte 7 geführt ist in einem Zustand, in dem das Verbindungselement 9 mittels der Wälzlager 19 verschiebbar bzw. gleitbar gestützt ist.
-
Zu dieser Zeit sind ein Paar von Wälzlagern 19 an dem oberen Abschnitt des Verbindungselements 9 und ein Paar von Wälzlagern 19 an dem unteren Abschnitt des Verbindungselements 9 montiert. Allerdings kann die Anzahl der Wälzlager 19 beliebig festgelegt werden.
-
Ein Verbindungsende 21 ist an einer Seite des Verbindungselements 9 geformt, und ein Ende des Stabilisatorverbindungselements 3 ist mit dem Verbindungsende 21 verbunden.
-
Das heißt: das Verbindungsende 21 des Verbindungselements 9 ist mittels einer Buchse 23 rotierbar an ein oberes Ende des Stabilisatorverbindungselements 3 montiert.
-
Ferner ist der Antriebsmotor 11 mit einem inneren Ende 25 des oberen Arms 5 im Eingriff, und ein Drehschaft des Antriebsmotors 11 ist als ein Gewindeschaft 27 ausgebildet, um mit dem Gewindeloch SH im Eingriff zu sein. Wenn der Gewindeschaft 27 rotiert, bewegt sich das Verbindungselement 9 linear entlang der Schienenplatte 7.
-
Dabei ist ein vorderes Ende des Gewindeschafts 27 drehbar gelagert mittels eines Lagers B, das in ein äußeres Ende des oberen Arms 5 eingepresst ist.
-
Hierbei kann der Antriebsmotor 11 ein Servomotor sein, dessen Drehzahl und Drehrichtung gesteuert werden können.
-
Zusätzlich kann der Antriebsmotor 11 an das innere Ende 25 des oberen Arms 5 mit einem Abstandshalter 29 montiert sein, welcher dortzwischen angeordnet ist.
-
Ferner ist ein Schlitz S an einer unteren Fläche 13b der Abdeckung 13 geformt. Der Schlitz S kann das Stabilisatorverbindungselement 3 aufnehmen, und das Stabilisatorverbindungselement 3 ist in dem Schlitz S bewegbar. Die Abdeckung 13 ist im Eingriff mit der Öffnung des oberen Arms 5, wenn diese mit der Schienenplatte 7 im Eingriff ist.
-
Um die Schienenplatte 7 mit der Abdeckung 13 zu kuppeln, sind Einrastnuten 31 an sowohl der oberen Fläche 7a als auch der unteren Fläche 7b der Schienenplatte 7 geformt, und Einrastvorsprünge 33, welche in die Einrastnuten 31 eingesetzt werden, sind an der oberen Fläche 13a und der unteren Fläche 13b der Abdeckung 13 geformt.
-
Zusätzlich ist die Abdeckung 13 mittels Bolzen an einen äußeren und einen inneren Endabschnitt der Öffnung des oberen Arms 5 montiert.
-
Der Antriebsmotor 11, welcher an dem inneren Ende 25 des oberen Arms 5 montiert ist, wird angetrieben gemäß einem Fahrzustand des Fahrzeugs, um eine Montageposition des Stabilisatorverbindungselements 3 an dem oberen Arm 5 zu steuern.
-
Dann wird ein Hebelverhältnis des Stabilisatorverbindungselements 3 verändert und auch eine Wanksteifigkeit der Stabilisatorstange 1 wird verändert. Daher kann die Wanksteifigkeit des Fahrzeugs aktiv gesteuert werden.
-
Nachfolgend wird mit Bezug auf 7 der Betrieb des aktiven Wankstabilisierungssystems gemäß verschiedenen Ausführungsformen der vorliegenden Erfindung im Detail beschrieben.
-
Wenn das Fahrzeug geradeaus fährt, ist das Verbindungselement 9, welches die Montageposition des Stabilisatorverbindungselements 3 an dem oberen Arm 5 bestimmt, an Position „P1” von 7 positioniert, und die Wanksteifigkeit der Stabilisatorstange 1 wird beim ursprünglichen Wert gehalten.
-
Wenn das Fahrzeug in diesem Zustand in eine Kurve fährt, steuert eine Steuervorrichtung den Antriebsmotor 11 an, um basierend auf Signalen, welche von einem Beschleunigungssensor, einem Höhensensor und einem Lenksensor ausgegeben werden, in eine Richtung zu rotieren.
-
Dann bewegt sich das Verbindungselement 9 an dem Gewindeschaft 27 zu Position „P2” in 7, und das Hebelverhältnis des Stabilisatorverbindungselements 3 wird erhöht. Daher nimmt auch die Wanksteifigkeit der Stabilisatorstange 1 zu. Ferner bewegt sich auch die Montageposition (P1 -> P2) des Stabilisatorverbindungselements 3 an dem oberen Arm 5 zur Position P2, an welcher sich der obere Arm 5 in einem größeren Bereich bewegen kann.
-
Wie oben beschrieben, betätigt das aktive Wankstabilisierungssystem gemäß verschiedenen Ausführungsformen der vorliegenden Erfindung den Antriebsmotor 11 gemäß dem Fahrzustand des Fahrzeugs, so dass die Montageposition des Stabilisatorverbindungselements 3 an dem oberen Arm 5 gesteuert werden kann. Daher werden das Hebelverhältnis des Stabilisatorverbindungselements 3 verändert und die Wanksteifigkeit des Fahrzeugs aktiv gesteuert, um die Stabilität des Fahrzeugs bei Kurvenfahrt bzw. Lenken zu verbessern.
-
Insbesondere wird die Montageposition des Stabilisatorverbindungselements 3 an dem oberen Arm 5 zu einer Position verschoben, an der der obere Arm 5 sich in einem größeren Bereich bewegen kann, wenn das Fahrzeug eine Kurve fährt. Daher wird das Wanken des Fahrzeugs aktiv gesteuert mittels einer größeren Wankunterdrückungskraft,
-
Da der Motor (z. B. Elektromotor), welcher an einer Seite des oberen Arms 5 montiert ist, als eine Antriebsquelle verwendet wird, ist die Steuerung des aktiven Wankstabilisierungssystems (ARCS) vereinfacht im Vergleich zu einem ARCS, das einen hydraulischen Druck verwendet. Da ein komplexes Hydraulikdruckzuführsystem nicht am Fahrzeugaufbau montiert wird, wird ein Layout verbessert.
-
Da eine Form des oberen Arms 5, welcher der Aufhängungsarm ist, „C”-förmig ist, kann ein Versatz zwischen dem Stabilisatorverbindungselement 3 und dem oberen Arm 5 minimiert werden. Da das Verbindungselement 9, welches mittels der Wälzlager geführt ist, verwendet wird, können ein. Effekt des Torsionsmoments minimiert und eine Betriebseffizienz verbessert werden.
-
Zwecks Erläuterung und genauer Definition der angehängten Ansprüche werden Begriffe wie zum Beispiel „obere” oder „untere”, „vordere” oder „hintere”, „innere” oder „äußere” usw. zur Beschreibung der Merkmale der beispielhaften Ausführungsformen mit Bezug auf die Positionen verwendet, wie sie in den Figuren dargestellt sind.
-
Die vorhergehenden Beschreibungen der spezifischen beispielhaften Ausführungsformen der vorliegenden Erfindung dienen dem Zweck der Darstellung und Beschreibung. Sie sollen nicht als erschöpfend oder die Erfindung auf die genaue offenbarte Form einschränkend verstanden werden. Es sind offensichtlich viele Modifikationen und Variationen möglich angesichts der obigen Lehre. Die beispielhaften Ausführungsformen wurden ausgewählt und beschrieben, um bestimmte Grundsätze der Erfindung und deren praktische Anwendung zu erläutern und damit dem Fachmann die Herstellung und den Gebrauch der verschiedenen Ausführungsformen der vorliegenden Erfindung sowie von deren zahlreichen Alternativen und Modifikationen zu ermöglichen. Es ist beabsichtigt, dass der Schutzumfang der Erfindung durch die angeführten Ansprüche und deren Äquivalente definiert wird,