CN106604883B - 记录装置 - Google Patents
记录装置 Download PDFInfo
- Publication number
- CN106604883B CN106604883B CN201580047836.XA CN201580047836A CN106604883B CN 106604883 B CN106604883 B CN 106604883B CN 201580047836 A CN201580047836 A CN 201580047836A CN 106604883 B CN106604883 B CN 106604883B
- Authority
- CN
- China
- Prior art keywords
- unit
- medium
- paper
- roller
- media
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H23/00—Registering, tensioning, smoothing or guiding webs
- B65H23/04—Registering, tensioning, smoothing or guiding webs longitudinally
- B65H23/18—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web
- B65H23/188—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in connection with running-web
- B65H23/1888—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in connection with running-web and controlling web tension
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J15/00—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, specially adapted for supporting or handling copy material in continuous form, e.g. webs
- B41J15/005—Forming loops or sags in webs, e.g. for slackening a web or for compensating variations of the amount of conveyed web material (by arranging a "dancing roller" in a sag of the web material)
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J15/00—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, specially adapted for supporting or handling copy material in continuous form, e.g. webs
- B41J15/04—Supporting, feeding, or guiding devices; Mountings for web rolls or spindles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J15/00—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, specially adapted for supporting or handling copy material in continuous form, e.g. webs
- B41J15/04—Supporting, feeding, or guiding devices; Mountings for web rolls or spindles
- B41J15/046—Supporting, feeding, or guiding devices; Mountings for web rolls or spindles for the guidance of continuous copy material, e.g. for preventing skewed conveyance of the continuous copy material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H23/00—Registering, tensioning, smoothing or guiding webs
- B65H23/04—Registering, tensioning, smoothing or guiding webs longitudinally
- B65H23/18—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web
- B65H23/182—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in unwinding mechanisms or in connection with unwinding operations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H23/00—Registering, tensioning, smoothing or guiding webs
- B65H23/04—Registering, tensioning, smoothing or guiding webs longitudinally
- B65H23/18—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web
- B65H23/188—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in connection with running-web
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H23/00—Registering, tensioning, smoothing or guiding webs
- B65H23/04—Registering, tensioning, smoothing or guiding webs longitudinally
- B65H23/18—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web
- B65H23/188—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in connection with running-web
- B65H23/192—Registering, tensioning, smoothing or guiding webs longitudinally by controlling or regulating the web-advancing mechanism, e.g. mechanism acting on the running web in connection with running-web motor-controlled
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J11/00—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, for supporting or handling copy material in sheet or web form
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H20/00—Advancing webs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2301/00—Handling processes for sheets or webs
- B65H2301/50—Auxiliary process performed during handling process
- B65H2301/51—Modifying a characteristic of handled material
- B65H2301/512—Changing form of handled material
- B65H2301/5121—Bending, buckling, curling, bringing a curvature
- B65H2301/51212—Bending, buckling, curling, bringing a curvature perpendicularly to the direction of displacement of handled material, e.g. forming a loop
- B65H2301/512125—Bending, buckling, curling, bringing a curvature perpendicularly to the direction of displacement of handled material, e.g. forming a loop by abutting against a stop
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2403/00—Power transmission; Driving means
- B65H2403/50—Driving mechanisms
- B65H2403/51—Cam mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2403/00—Power transmission; Driving means
- B65H2403/50—Driving mechanisms
- B65H2403/51—Cam mechanisms
- B65H2403/514—Cam mechanisms involving eccentric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2404/00—Parts for transporting or guiding the handled material
- B65H2404/10—Rollers
- B65H2404/14—Roller pairs
- B65H2404/143—Roller pairs driving roller and idler roller arrangement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2404/00—Parts for transporting or guiding the handled material
- B65H2404/10—Rollers
- B65H2404/14—Roller pairs
- B65H2404/144—Roller pairs with relative movement of the rollers to / from each other
- B65H2404/1441—Roller pairs with relative movement of the rollers to / from each other involving controlled actuator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2511/00—Dimensions; Position; Numbers; Identification; Occurrences
- B65H2511/20—Location in space
- B65H2511/22—Distance
- B65H2511/224—Nip between rollers, between belts or between rollers and belts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2801/00—Application field
- B65H2801/03—Image reproduction devices
- B65H2801/12—Single-function printing machines, typically table-top machines
Landscapes
- Ink Jet (AREA)
- Controlling Rewinding, Feeding, Winding, Or Abnormalities Of Webs (AREA)
- Handling Of Sheets (AREA)
- Handling Of Continuous Sheets Of Paper (AREA)
Abstract
减少了运送时介质的曲折。一种记录装置,其运送介质并且在介质上执行记录,所述装置包括:记录单元;介质夹紧单元,其沿运送方向设置在比记录单元更上游的那侧,并且夹紧其间的介质;以及介质支撑单元,其沿运送方向设置在比介质夹紧单元更上游的那侧,并且支撑介质,其中介质在介质夹紧单元与介质支撑单元之间松弛。
Description
技术领域
本发明涉及一种记录装置。
背景技术
在相关技术中,已知这样一种打印机(例如,参见专利文献1),其例如包括:辊体驱动机构,其通过使介质以辊形缠绕所围绕的辊体旋转而沿运送方向运送介质;第一运送机构,其沿运送方向设置在比辊体更下游的那侧,并且运送介质;以及第二运送机构,其设置在辊体和第一运送机构之间,并且运送介质,并且其中,介质以在第一运送机构和第二运送机构之间保持恒定张力的状态被运送。
引用列表
专利文献
PTL 1:JP-A-2012-82024
发明内容
技术问题
然而,在打印机中,由于第二运送机构的偏心旋转等而导致发生运送量的误差,或者在介质的宽度方向上的一端侧与另一端侧之间发生第二运送机构的运送量的差异,并且打印头侧受到经由第一运送机构的运送量的波动所影响,结果,存在打印质量恶化的问题。
问题的解决方案
为了解决上述问题的至少一部分,本发明已被做出,并且本发明能够被执行为如下的实施例或应用例。
应用例1
根据本应用例的记录装置为运送介质并且对于所运送的介质执行记录的记录装置,所述装置包括记录单元、介质夹紧单元以及介质支撑单元,所述介质夹紧单元沿运送方向设置在比记录单元更上游的那侧并且夹紧其间的介质,所述介质支撑单元沿运送方向设置在比介质夹紧单元更上游的那侧并且支撑介质,其中介质在介质夹紧单元与介质支撑单元之间松弛。
根据该构造,即便当运送介质时从辊体拉出的介质在宽度方向上出现运送量的差异时,介质在运送至介质夹紧单元之前由介质支撑单元支撑。另外,构造为使得介质在介质夹紧单元与介质支撑单元之间松弛。即,由于张力未施加至介质夹紧单元与介质支撑单元之间的介质,所以容易减小介质在宽度方向上的运送量的差异。
应用例2
在根据本应用例的记录装置中,介质可以从以辊形缠紧的辊体拉出,并且介质的运送量可以被调节为使得预定的张力施加至辊体与介质支撑单元之间的介质。
根据该构造,在运送介质时能够减少由于辊体的偏心而发生的介质的曲折。
应用例3
在根据本应用例的记录装置中,弯曲路径可以设置在介质夹紧单元与介质支撑单元之间。
根据该构造,从辊体拉出的介质经由介质支撑单元通过弯曲而被运送至介质夹紧单元。以这种方式,由于介质使用介质支撑单元的支撑区域增加,所以能够改进所运送的介质的平直度。
应用例4
在根据本应用例的记录装置中,介质夹紧单元与介质支撑单元之间的介质的松弛量可以通过驱动介质支撑单元而调节。
根据该构造,能够容易调节松弛量。
应用例5
在根据本应用例的记录装置中,介质支撑单元可以构造为以便夹紧其间的介质,并且介质支撑单元的夹紧力可以改变。
根据该构造,通过对于所运送的介质改变夹紧力,能够不依赖于所运送的介质的类型而改进所运送的介质的平直度。
附图说明
图1为图示出根据第一实施例的记录装置的构造的示意图。
图2为图示出根据第一实施例的介质支撑单元的构造的示意图。
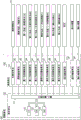
图3为图示出根据第一实施例的记录装置的控制单元的构造的框图。
图4为图示出根据第二实施例的记录装置的构造的示意图。
图5A为图示出根据第二实施例的松弛量检测单元的构造的示意图。
图5B为图示出根据第二实施例的松弛量检测单元的构造的示意图。
图6为图示出根据第二实施例的记录装置的控制单元的构造的框图。
图7为图示出根据第二实施例的记录装置的控制方法的流程图。
图8为图示出根据变形例1的记录装置的构造的示意图。
图9为图示出根据变形例2的记录装置的构造的示意图。
图10为图示出根据变形例2的记录装置的控制单元的构造的框图。
图11为图示出根据变形例3的记录装置的构造的示意图。
具体实施方式
以下将参照附图描述本发明的第一和第二实施例。另外,在下面的每个附图中,为了使每个构件等为可识别的尺寸,各构件等的比例使用不同于实际比例的比例表示。
第一实施例
首先,将描述记录装置的构造。记录装置为运送介质、在所运送的介质上执行记录的记录装置,并且包括:记录单元;介质夹紧单元,其沿运送方向设置在比记录单元更上游的那侧并且夹紧其间的介质;以及介质支撑单元,其沿运送方向设置在比介质夹紧单元更上游的那侧并且支撑介质,其中介质在介质夹紧单元与介质支撑单元之间松弛。记录装置例如为喷墨打印机。以下将详细描述记录装置。
图1为图示出记录装置的构造的示意图。如图1所示,记录装置1由主体壳体12、运送介质的运送单元2等构成。构造运送单元2的一部分的供纸单元13为将介质供给至主体壳体12的单元。另外,根据本实施例,将描述长片状的纸RP作为介质被应用的构造。另外,在根据本实施例的供纸单元13中放置有辊体,其中长片状的纸RP绕辊轴13a缠绕。辊轴13a具有连接至驱动源(马达)并且使用驱动源(马达)的驱动而旋转的构造。另外,当辊体绕辊轴13a旋转时纸RP被从辊体拉出,并且被供应至主体壳体12。另外,供纸单元13可以布置在主体壳体12内。
记录单元15和排纸单元14等设置在主体壳体12中,其中,记录单元15通过将液体喷射到所供应的纸RP上而形成图像等,排纸单元14将其上形成有图像等的纸RP作为单页纸CP从设置在主体壳体12中的排出口排出至排纸托盘12a。另外,纸RP使用运送单元2被运送至记录单元15,并且此后作为单页纸CP被运送至排纸单元14。
记录单元15在所运送的纸RP的高侧(反重力方向侧)包括滑架18。滑架18以沿着与运送方向F交叉的纸RP的宽度方向在近似水平的方向上延伸的状态由安装在主体壳体12中的引导轴(未示出)支撑,并且能够沿着引导轴移动。液体喷射头19在面向所运送的纸RP的下面侧附接至滑架18。液体喷射头19设置有喷射作为液体的示例的墨水的多个喷嘴(未示出),并且当滑架18在由引导轴引导的同时沿着纸RP的宽度方向进行往复运动时,液体喷射头19随着滑架18在沿着引导轴的方向(主扫描方向)上进行往复运动。
另外,记录装置1包括台板20,台板20在面向液体喷射头19的位置通过夹紧在其间运送的纸RP而从下侧(重力方向侧)支撑纸RP。台板20在面对液体喷射头19的顶面上具有主扫描方向为纵向的近似矩形的面,并且台板20通过使用施加至台板20的负压将纸吸在台板20的顶面上而支撑纸RP。
即,台板20包括支撑面形成构件21和支撑单元框架构件22,支撑面形成构件21为其顶面形成为支撑沿运送方向F运送的纸RP的介质支撑面SM的近似平板形状,支撑单元框架构件22以连接方式在与介质支撑面SM相对的下面侧固定至支撑面形成构件21。另外,由于连接的支撑面形成构件21和支撑单元框架构件22而形成了内部空间,并且所述内部空间用作被施加有用于将纸RP吸在介质支撑面SM上的负压的负压室21s。
另外,根据本实施例,负压发生单元23设置在台板20的下侧,负压发生单元23连接至负压室21s从而与其连通,并且由用于从负压室21s吸气的吸气室23a和旋转扇23b形成。因此,当由于旋转扇23b的旋转而使空气(大气)如附图中的双点划线的箭头K所指示地那样流动时,在负压发生单元23中发生的负压被施加至负压室21s。
另外,当墨水从液体喷射头19喷射到通过被吸附而由台板20支撑的纸RP的表面(图1中的顶面)上时,由于墨水附着到纸RP而进行图像等的记录(打印)。另外,当在记录装置1中进行无边距打印时,墨水排出单元24设置在台板20中,喷射到台板20的墨水从该墨水排出单元排出。
另外,在主体壳体12中,导板26和将纸RP从台板20侧向排纸单元14侧引导的一对运送辊27沿运送方向F设置在比台板20(支撑面形成构件21)更下游的那侧。另外,设置有将纸RP从排纸口排出至排纸托盘12a的一对排纸辊28。另外,必要时在一对运送辊27与排纸辊28之间设置切刀、干燥单元等,所述切刀将其上形成有图像的纸RP切割为具有预定长度的单页纸CP,所述干燥单元通过对着单页纸CP的打印面吹暖风(干燥风)而使墨水干燥,并且干燥单元沿运送方向F设置在比切刀更下游的那侧。另外,干燥单元可以沿运送方向F布置在比切刀更上游的那侧,或者可以沿运送方向F设置在比一对运送辊27更上游的那侧。另外,由于能够使用沿运送方向F设置在比切刀更上游的那侧的运送单元来将纸RP运送至切刀的位置,所以可以不设置一对运送辊27。
接下来,将详细描述运送单元2的构造。根据本实施例的运送单元2包括供纸单元13、介质夹紧单元17以及介质支撑单元40,介质夹紧单元17沿运送方向F设置在比记录单元15更上游的那侧并且夹紧其间的纸RP,介质支撑单元40沿运送方向F设置在比介质夹紧单元17更上游的那侧并且支撑纸RP。
介质夹紧单元17由送纸辊17a和随着送纸辊17a的旋转而被驱动的压纸辊17b构成。送纸辊17a构造为连接至驱动源(马达),并且由于驱动源(马达)的驱动而旋转。以这种方式,纸RP在被夹紧在送纸辊17a和压纸辊17b之间的同时,向位于运送方向F的下游侧的记录单元15侧运送。送纸辊17a具有带有呈纸RP的宽度以上的长度的接触面,并且通过使送纸辊17a的接触面与纸RP沿宽度方向接触而运送纸RP。压纸辊17b构造为不管纸RP的位置而沿宽度方向以近似均匀的力被推压在送纸辊17a侧上。另外,能够沿送纸辊17a的轴向布置多个压纸辊17b。当布置多个压纸辊17b时,由于还能够通过增加布置的数量或者加宽布置的范围或宽度而在每个布置中相对于纸RP分散夹紧力,进而减弱各部分中的夹紧力,所以能够减少当夹紧在送纸辊17a与压纸辊17b之间时在纸RP中产生的凹痕。
介质支撑单元40支撑纸RP,并且根据本实施例,介质支撑单元构造为夹紧其间的纸RP。具体地,如图1所示,介质支撑单元40由第一辊40a和随着第一辊40a的旋转而被驱动的第二辊40b构成。第一辊40a构造为连接至驱动源(马达),并且由于驱动源(马达)的驱动而旋转。以这种方式,纸RP在被夹紧在第一辊40a和第二辊40b之间的同时,向位于运送方向F的下游侧的介质夹紧单元17侧运送。第一辊40a具有带有呈纸RP的宽度以上的长度的接触面,并且通过使第一辊40a的接触面沿宽度方向与纸RP接触而运送纸RP。第二辊40b构造为不管纸RP的位置而沿宽度方向以近似均匀的力被推压在第一辊40a侧上。另外,沿第一辊40a的轴向能够布置多个第二辊40b。当布置多个第二辊40b时,由于还能够通过增加布置的数量或者加宽布置的范围或宽度而在每个布置中相对于纸RP分散夹紧力,进而减弱各部分中的夹紧力,所以能够减少当夹紧在第一辊40a与第二辊40b之间时在纸RP中产生的凹痕。
另外,在介质支撑单元40中,构造为使得夹紧纸RP的夹紧力能够被改变。图2为图示出介质支撑单元的构造的示意图。如图2所示,介质支撑单元40包括第一辊40a和第二辊40b,并且包括使用第一辊40a和第二辊40b能够改变纸RP的夹紧力的偏心凸轮41。偏心凸轮41包括与圆盘部的中心偏离的偏心轴41a,构造为绕偏心轴41a旋转,并且构造为将偏心轴41a固定至任意的旋转位置。偏心凸轮41的圆盘部的外周部与第二辊40b的旋转轴接触。另外,当偏心凸轮41旋转时,第二辊40b由于圆盘部的偏心旋转而能够沿趋向第一辊40a侧的方向移动。以这种方式,能够任意地改变夹紧纸RP的夹紧力。
另外,在运送单元2中,供纸单元13布置在沿运送方向F的最上游侧,介质支撑单元40沿运送方向F布置在供纸单元13的下游侧,并且介质夹紧单元17沿传送方向F布置在介质支撑单元40的下游侧。在此,纸RP在介质夹紧单元17与介质支撑单元40之间松弛。详细地,通过在介质夹紧单元17中的送纸辊17a和压纸辊17b之间夹住(夹紧)纸RP的点,以及在介质支撑单元40中的第一辊40a和第二辊40b之间夹住(夹紧)纸RP的点,使纸RP松弛,张力不会被施加至介质夹紧单元17与介质支撑单元40之间的纸RP。另外,通过驱动介质支撑单元40而调节介质夹紧单元17与介质支撑单元40之间的纸RP的松弛量。
同时,构造使得预定的张力被施加至供纸单元13(辊体)与介质支撑单元40之间的纸RP。具体地,张力在纸RP被从供纸单元13(辊体)拉出的点以及在纸RP在介质支撑单元40中的第一辊40a与第二辊40b之间被夹住(夹紧)的点被施加至纸RP。另外,来自供纸单元13的纸RP的送出量,以及在介质支撑单元40的位置处的纸RP的运送量,或者来自供纸单元13的纸RP的送出量以及在介质支撑单元40的位置处的纸RP的运送量二者,构造为被调节以使得预定的张力被施加至纸RP。因此,根据本实施例的记录装置1包括张力被施加至供纸单元13(辊体)与介质支撑单元40之间的纸RP的区域,以及张力未被施加至运送单元2中的介质支撑单元40与介质夹紧单元17之间的纸RP的区域。另外,纸RP在未施加有张力的状态下向记录单元15侧运送。
另外,弯曲路径形成在介质夹紧单元17与介质支撑单元40之间。具体地,使纸RP的运送中继并且位于运送路径的途中的中继辊51和52布置在介质夹紧单元17与介质支撑单元40之间,并且纸RP被运送通过中继辊51和52的附近。以这种方式,纸RP的从供纸单元13经由介质支撑单元14从高部分向低部分运送的运送方向F从中继辊51和52的附近起被改变为朝向介质夹紧单元17侧沿水平方向的运送方向F。另外,中继辊51和52起调整单元的作用,所述调整单元调整使得所运送的纸RP在弯曲路径中不会不必要地进入弯曲路径的内侧。纸RP在弯曲路径中松弛;然而,优选的是,纸RP的松弛量被调节为不与中继辊51和52接触的程度。以这种方式,能够减小当中继辊51和52与纸RP接触时发生的对运送的影响。另外,由于纸RP经由介质夹紧单元17与介质支撑单元40之间的弯曲路径从高部分向低部分运送,所以能够以悬浮的状态运送纸RP,并且在运送纸RP的过程中能够使纸RP不与布置在运送路径下侧的构件或者纸RP的支撑单元接触。由于这个原因,不仅能够减小当张力施加至在运送方向F上比介质支撑单元40更上游的那侧的纸RP时引起的影响,还能够减小当纸RP与在运送方向F上比介质支撑单元40更下游那侧的各种构件接触时引起的对运送的影响。
随后,将描述记录装置的控制单元的构造。图3为图示出记录装置的控制单元的构造的框图。如图3所示,控制单元100包括指令单元130、驱动单元140、显示驱动单元150以及输入检测单元160。指令单元130由CPU 132、作为存储单元的ROM 133、RAM 134,以及输入-输出接口131构成,并且CPU132基于ROM 133和RAM 134的数据而处理通过输入-输出接口131输入的各种信号,并且通过输入-输出接口131向驱动单元140输出控制信号。CPU 132例如基于存储在ROM 133中的打印程序来执行各种控制。
驱动单元140由头驱动单元141、滑架驱动单元142、第一马达驱动单元143、第二马达驱动单元144、第三马达驱动单元145、第四马达驱动单元146、第五马达驱动单元147、第六马达驱动单元148、第七马达驱动单元149等构成。另外,头驱动单元141基于指令单元130的控制信号控制液体喷射头19。另外,滑架驱动单元142控制滑架马达以及滑架18的移动。另外,第一马达驱动单元143控制连接至供纸单元13的辊轴13a的第一马达的驱动。第二马达驱动单元144控制连接至介质支撑单元40的第一辊40a的第二马达的驱动。第三马达驱动单元145控制连接至介质夹紧单元17的送纸辊17a的第三马达的驱动。第四马达驱动单元146控制连接至一对运送辊27的第四马达的驱动。第五马达驱动单元147控制连接至一对排纸辊28的第五马达的驱动。第六马达驱动单元148控制连接至偏心凸轮41的第六马达的驱动。另外,第七马达驱动单元149控制连接至旋转扇23b的第七马达的驱动。
另外,显示驱动单元150通过输入-输出接口131连接至控制单元100的指令单元130。另外,显示装置(例如,监视器)连接至显示驱动单元150。另外,输入检测单元160通过输入-输出接口131连接至控制单元100的指令单元130。另外,诸如鼠标或键盘的输入单元连接至输入检测单元160。另外,通过以这种方式构造控制单元100,能够控制各种单元。例如,通过执行连接至供纸单元13的第一马达的驱动控制以及连接至介质支撑单元40的第二马达的驱动控制而能够将预定的张力施加至供纸单元13(辊体)与介质支撑单元40之间的纸RP。另外,通过执行连接至介质支撑单元40的第一辊40a的第二马达的驱动控制而能够调节介质夹紧单元17与介质支撑单元40之间的纸RP的松弛量。另外,通过执行连接至偏心凸轮41的第六马达的驱动控制而能够使用介质支撑单元40的第一辊40a和第二辊40b来任意地改变对于纸RP的夹紧力。另外,通过执行第二马达和第三马达的驱动控制而能够执行控制使得使用介质支撑单元40的第一辊40a在运送方向F上运送的纸RP的送出量大于使用介质夹紧单元17的送纸辊17a在运送方向F上运送的纸RP的送出量。
如上所述,根据本实施例,能够获得以下效果。
当沿运送方向F运送纸RP时,即便从供纸单元13的辊体拉出的纸RP在宽度方向上存在运送量的差异,纸RP在运送至介质夹紧单元17之前由介质支撑单元40支撑。由于张力被施加至供纸单元13的辊体与介质支撑单元40之间的纸RP,所以减小了运送量的误差(曲折)。另外,由于构造为使得介质支撑单元40与介质夹紧单元17之间的纸RP松弛,并且张力未施加至该纸RP,所以即便介质支撑单元40的第一辊40a执行偏心旋转,或者介质支撑单元40的介质在纸RP的宽度方向上的一端侧与另一端侧之间的运送量存在差异,由介质的运送量的波动所引起的影响在运送方向F上比介质支撑单元40更上游的那侧也不会变强。即,容易减小当运送纸RP时的运送量的波动或者纸RP在宽度方向上的运送量的差异。因此,在纸RP到达记录单元15之前就避免了纸RP的运送量的波动或者纸RP的曲折,并且能够在记录单元15中在纸RP上执行高质量的记录。
第二实施例
接下来,将描述第二实施例。
首先,将描述记录装置的构造。根据本实施例的记录装置为如下的记录装置:其运送从辊体(围绕辊体介质以辊形缠绕)拉出的介质,并且执行记录,并且包括记录单元、介质夹紧单元以及介质支撑单元,所述介质夹紧单元沿运送方向设置在比记录单元更上游的那侧并且夹紧其间的介质,所述介质支撑单元沿运送方向设置在比介质夹紧单元更上游的那侧并且支撑介质,并且其中在介质夹紧单元与介质支撑单元之间包括弯曲路径。另外,在记录装置的弯曲路径中,介质松弛并且包括检测介质的松弛量的松弛量检测单元。之后,将详细描述该记录装置。
图4为图示出记录装置的构造的示意图。如图4所示,记录装置1a由主体壳体12、运送介质的运送单元2a等构成。另外,由于主体壳体12、布置在主体壳体12中的供纸单元13、记录单元15、排纸单元14等的构造与第一实施例的相同,所以将省略其描述。
接下来,将详细描述运送单元2a及其周边的构造。根据本实施例的运送单元2a包括供纸单元13、介质夹紧单元17以及介质支撑单元40,所述介质夹紧单元17沿运送方向F设置在比记录单元15更上游的那侧并且夹紧其间的纸RP,所述介质支撑单元40沿运送方向F设置在比介质夹紧单元17更上游的那侧并且支撑纸RP。另外,在介质夹紧单元17与介质支撑单元40之间包括弯曲路径W。具体地,使纸RP的运送中继并且位于运送路径的途中的中继辊51等布置在介质夹紧单元17与介质支撑单元40之间,并且纸RP被运送通过中继辊51的附近等。以这种方式,从供纸单元13经由介质支撑单元40从高部分向低部分运送的纸RP的运送方向F由运送路径(弯曲路径W)构成,在所述运送路径中,路径从中继辊51的附近等起改变为朝向介质夹紧单元17的水平方向的运送方向F。另外,中继辊51等起到调整单元的作用,所述调整单元调整使得所运送的纸RP在弯曲路径W中不会不必要地进入弯曲路径W的内侧。纸RP在弯曲路径W上松弛;然而,优选将纸RP的松弛量调节为不与中继辊51等接触的程度。以这种方式,能够减小当纸RP与中继辊51等接触时引起的对运送的影响。另外,由于介质夹紧单元17与介质支撑单元40的构造与第一实施例的相同,所以将省略其描述。
在根据本实施例的运送单元2a中,供纸单元13布置在运送方向F上最上游侧,介质支撑单元40沿运送方向F布置在供纸单元13的下游侧,而介质夹紧单元17沿运送方向F布置在介质支撑单元40的下游侧。在此,在介质夹紧单元17与介质支撑单元40之间的弯曲路径W中,纸RP松弛,并且包括检测纸RP的松弛量的松弛量检测单元60。具体地,纸RP在纸RP于介质夹紧单元17中的送纸辊17a与压纸辊17b之间被夹住(夹紧)的点,以及在纸RP于介质支撑单元40中的第一辊40a与第二辊40b之间被夹住(夹紧)的点松弛。另外,松弛量检测单元60布置在弯曲路径W中。另外,松弛量检测单元60布置在弯曲路径W内侧。具体地,松弛量检测单元布置在纸RP的运送路径(弯曲路径W)与记录单元15之间。以这种方式,能够有效地使用弯曲路径W内侧的空间,并且将记录装置1a的构造最小化。
图5A和图5B图示出松弛量检测单元的构造,其中图5A为松弛量检测单元的示意性侧视图,而图5B为图示出松弛量检测单元的布置位置的示意性平面图。如图5A所示,松弛量检测单元60包括检测杆单元61、支点部62、检测单元63以及检测传感器67(例如,光传感器),支点部62设置在检测杆单元61的一个端部处,检测单元63设置在检测杆单元61的另一端部处,检测传感器67布置在面向检测单元63的位置处。检测杆单元61构造为绕支点部62旋转。另外,根据本实施例的松弛量检测单元60通过与纸RP接触来检测松弛量。以这种方式,相比于使用非接触方法执行光学检测的检测单元,能够不依赖所运送的纸RP的反射率等而精确地检测松弛量。由于这个原因,能够不受纸RP的类型(诸如透明材料的纸RP),或者纸RP的表面的粗糙度的影响而检测松弛量,并且能够对应于各种类型的纸RP。具体地,与纸RP接触并且可旋转的接触辊66设置在检测杆单元61的一部分处。另外,构造为使得检测杆单元61由于弯曲路径W中纸RP的松弛量的改变而绕支点部62可旋转地移动。另外,拉簧69连接至检测杆单元61,并且拉簧驱使检测杆单元61到不向纸RP施加负荷的程度。
另外,例如,当在弯曲路径W中纸RP的松弛量减小时,如图5A中的虚线所指示的,纸RP被向上推。与此一同地,与纸RP接触的接触辊66被向上推。随后,检测杆单元61绕支点部62在检测传感器67侧旋转。另外,构造为使得,当检测单元63与检测传感器67之间的距离变短并且来自检测传感器67的输出值超过预定的阈值时,检测传感器67的开关被接通。另外,如图5B所示,多个松弛量检测单元60沿纸RP的宽度方向布置。另外,构造为使得能够在宽度方向上检测纸RP的任何部分的松弛量。另外,当松弛量检测单元60在宽度方向上布置在纸RP的至少一个部分时能够检测松弛量。当松弛量检测单元布置在仅一个部分时,优选为设在能够在对应的纸RP中检测出最小宽度的松弛量的位置。
同时,构造为使得预定的张力施加至供纸单元13(辊体)与介质支撑单元40之间的纸RP。具体地,在纸RP被从供纸单元13(辊体)拉出的点,以及在纸RP在介质支撑单元40中的第一辊40a与第二辊40b之间被夹住(夹紧)的点,张力被施加至纸RP。另外,构造为使得纸RP的运送量被调节为使得预定的张力施加至纸RP。因此,根据本实施例的记录装置1a包括张力被施加至供纸单元13(辊体)与介质支撑单元40之间的纸RP的区域,以及张力未被施加至运送单元2a中的介质支撑单元40与介质夹紧单元17之间的纸RP的区域。另外,纸RP在未施加有张力的状态下被运送至记录单元15。
接下来,将描述记录装置的控制单元的构造。图6为图示出记录装置的控制单元的构造的框图。如图6所示,控制单元100包括指令单元130、驱动单元140、显示驱动单元150以及输入检测单元160。另外,控制单元100的构造与第一实施例中的相同,省略其描述,并且将描述不同的部分。具体地,控制单元100的指令单元130通过输入-输出接口131与输入检测单元160连接。另外,松弛量检测单元60连接至输入检测单元160。以这种方式,使用松弛量检测单元60将松弛量的检测结果输入至控制单元100。另外,通过基于使用松弛量检测单元60的松弛量的检测结果来执行第二马达的驱动控制,能够控制(调节)介质夹紧单元17与介质支撑单元40之间的纸RP的松弛量。
接下来,将基于第二实施例描述记录装置的控制方法。图7为图示出记录装置的控制方法的流程图。另外,根据本实施例,将描述如下情况下的控制方法:在该情况下,在介质夹紧单元17与介质支撑单元40之间的纸RP的弯曲路径W中,所运送的纸RP的松弛量减小。
首先,在步骤S11中,运送单元2a被驱动。具体地,第一马达(辊轴13a)、第二马达(第一辊40a)、第三马达(送纸辊17a)等基于驱动程序被驱动。以这种方式,纸RP被从供纸单元13的辊体拉出,并且沿运送方向F运送。另外,纸RP在介质夹紧单元17与介质支撑单元40之间的纸RP的弯曲路径W中松弛,并且第一马达、第二马达以及第三马达受到驱动控制,使得预定的张力施加至供纸单元13的辊体与介质支撑单元40之间的纸RP。
另外,松弛量检测单元60被设定为如下状态:其中松弛量检测单元能够通过供电,或者必要时通过执行设定来检测松弛量。能够检测松弛量的驱动时序可以比步骤S11中的运送单元2a的驱动更早,或者可以为与运送单元2a的驱动时序相同。
接下来,在步骤S12中,判定松弛量检测单元60的开关是否接通。在此,松弛量检测单元60的开关未被接通的状态(OFF状态)为松弛量检测单元60中的检测单元63与检测传感器67之间的距离为恒定距离或以上并且来自检测传感器67的输出值未超过预定的阈值的状态。即,其为检测传感器67不能检测检测单元63,并且纸RP在介质夹紧单元17与介质支撑单元40之间的纸RP的弯曲路径W中松弛的状态。另一方面,松弛量检测单元60的开关被接通的状态为松弛量检测单元60中的检测单元63与检测传感器67之间的距离变短并且来自检测传感器67的输出值超过预定的阈值的状态。即,其为检测传感器67检测到检测单元63,并且相比于介质夹紧单元17与介质支撑单元40之间的纸RP的弯曲路径W中的预定松弛量,RP的松弛量减小的状态。当张力施加至纸RP至一定程度时,其为张力增加并且超过预定的张力阈值的状态。另外,当松弛量检测单元60的开关未被接通(OFF状态)(步骤S12中为否)时,结束第一马达、第二马达以及第三马达的驱动控制,并且当松弛量检测单元60的开关接通(步骤S12中为是)时,过程进行至步骤S13。
另外,当过程进行至步骤S13时,连接至介质支撑单元40的第一辊40a的第二马达受到驱动控制。具体地,第二马达受到驱动控制使得使用介质支撑单元40的纸RP的运送量(送出量)变得大于使用介质夹紧单元17的纸RP的运送量(送出量)。以这种方式,当某程度的张力通过使介质夹紧单元17与介质支撑单元40之间的纸RP的弯曲路径W中的纸RP松弛而施加至纸RP时,能够降低对于所运送的纸RP的张力。
接下来,过程进行到步骤S12,并且判定松弛量检测单元60的开关是否接通。另外,执行步骤S13中的处理直到松弛量检测单元60的开关未被接通的状态,并且当其为松弛量检测单元60的开关未被接通的状态时,结束第一马达、第二马达以及第三马达的驱动控制。另外,在松弛量检测单元60的开关未被接通的状态之后,连接至介质支撑单元40的第一辊40a的第二马达的驱动控制可以继续一段时间,并且纸RP的运送量可以增加。在该情况下,优选设定纸RP不与沿运送路径布置的各种构件接触的程度。即,第二马达可以受到驱动控制使得通过过度松弛,纸RP不与布置在纸RP的运送路径的下侧等的构件等接触。
如上所述,根据本实施例,能够获得如下效果。
(1)从供纸单元13的辊体向记录单元15运送的纸RP经由形成在介质支撑单元40与介质夹紧单元17之间的弯曲路径W运送。因此,相比于线性形成的纸RP的运送路径,供纸单元13的辊体与记录单元15之间的运送路径变短,并且能够将记录装置1a的构造最小化。
(2)能够使用松弛量检测单元60来检测形成在介质支撑单元40与介质夹紧单元17之间的弯曲路径W中的纸RP的松弛量。以这种方式,能够检测关于纸RP的合适的松弛量。另外,通过基于松弛量检测单元60的检测结果执行第二马达的驱动控制,能够对于弯曲路径W中的纸RP施加合适的松弛量。另外,由于通过采用张力施加至供纸单元13与介质支撑单元40之间的纸RP,并且另一方面纸RP在介质支撑单元40与介质夹紧单元17之间松弛的构造而使张力几乎不施加至纸RP,所以即便介质支撑单元40的第一辊40a执行偏心旋转,或者介质支撑单元40的介质在纸RP的宽度方向上的一端侧与另一端侧之间的运送量存在差异,由介质的运送量的波动引起的影响也不会在记录单元15中变强。即,纸RP运送时的运送量的波动,或者纸RP在宽度方向上的运送量的差异很容易减小。因此,在纸RP到达记录单元15之前就避免了纸RP的运送量的波动或者纸RP的曲折,并且能够在记录单元15中在纸RP上执行高质量的记录。
另外,本发明不限于上述实施例,并且能够向实施例增加各种变形或改进。以下将描述变形例。
变形例1
在第一实施例和第二实施例中,描述了将长片状的纸RP作为介质应用的构造;然而,并与限于该构造。例如,可以是运送单页纸的构造。图8为图示出根据变形例的记录装置的构造的示意图。如图8所示,在记录装置1b中,代替作为辊体的供纸单元13,单页纸P被输入。此时,设置使得单页纸P的在运送方向F的末端部接触介质支撑单元40的第一辊40a与第二辊40b。另外,通过驱动介质支撑单元40,单页纸向介质夹紧单元17侧运送。另外,由于记录装置1b的基本构造与第一实施例中的记录装置1的相同,所以将省略其描述。同样在这样的构造中,通过经由介质支撑单元40沿运送方向F运送单页纸P,能够减少单页纸P的曲折。另外,在记录装置1b中,介质支撑单元40布置在主体壳体12的高部分。通过这样做,能够容易地设置单页纸P。另外,在记录装置1b中,能够应用具有能够同时夹紧在介质支撑单元40与介质夹紧单元17中的尺寸的单页纸P。
变形例2
第一实施例和第二实施例具有如下的构造:其中包括由第一辊40a和第二辊40b构成的介质支撑单元40,并且使用介质支撑单元40支撑纸RP;然而,并不限于该构造。例如,可以为如下的记录装置的构造:该记录装置通过运送从辊体(围绕辊体介质以辊形缠绕)拉出的介质来执行记录,包括记录单元和介质支撑辊,并且通过使介质沿着介质支撑辊的周面而运送介质。
图9为图示出根据变形例的记录装置的构造的示意图。如图9所示,记录装置1c由主体壳体12、运送介质的运送单元2b等构成。另外,由于主体壳体12以及布置在主体壳体12中的供纸单元13、记录单元15、排纸单元14等的构造与第一实施例中的构造相同,所以将省略其描述。
接下来,将详细描述运送单元2b的构造。根据变形例的运送单元2b包括供纸单元13、介质夹紧单元17、介质支撑辊400等,介质夹紧单元17沿运送方向F设置在比记录单元15更上游的那侧并且夹紧纸RP,介质支撑辊400沿运送方向F设置在比介质夹紧单元17更上游的那侧并且支撑纸RP。另外,由于介质夹紧单元17的构造与第一实施例中的相同,所以将省略其描述。
介质支撑辊400为在支撑纸的同时运送纸RP的辊。具体地,介质支撑辊构造为使用介质支撑辊400的周面400a支撑纸RP,并且沿着周面400a运送纸RP,介质支撑辊400的周面400a处于使用强摩擦力等纸RP在其上几乎不滑动的状态。
另外,用于将纸RP压在介质支撑辊400上的辅助辊450布置在介质支撑辊400的纸RP沿运送方向F的上游侧和下游侧的至少一侧。另外,根据变形例,一个辅助辊450(450a,450b)布置在介质支撑辊400的纸RP沿运送方向F的相应的上游侧和下游侧。另外,构造为使得纸RP能够被夹紧在介质支撑辊400与辅助辊450之间。具体地,如图9所示,介质支撑辊400和辅助辊450a被布置为使得形成弯曲区域H1,所述弯曲区域H1在布置于介质支撑辊400的纸RP的运送方向F上的上游侧的辅助辊450a与介质支撑辊400之间所运送的纸RP的运送路径中弯曲。类似地,介质支撑辊400和辅助辊450b被布置为使得形成弯曲区域H2,所述弯曲区域H2在布置于介质支撑辊400的纸RP的运送方向F上的下游侧的辅助辊450b与介质支撑辊400之间所运送的纸RP的运送路径中弯曲。另外,形成弯曲区域H3,其中纸RP沿着介质支撑辊400的周面400a运送的运送路径也是弯曲的。以这种方式,由于当纸RP被运送通过弯曲区域H1、H2和H3时因纸RP与介质支撑辊440之间或者与辅助辊450a和450b之间接触而引起的摩擦量增加,所以在每个弯曲区域H1、H2和H3中能够减小在纸RP的宽度方向上的运送量的误差,并且能够改进对于运送方向F的平直度。
另外,构造为使得介质支撑辊400与辅助辊450a和450b之间的相对位置能够移动。根据变形例,辅助辊450a和450b构造为以便相对于介质支撑辊400移动。具体地,辅助辊450a和450b连接至可移动单元460,可移动单元460连接至驱动源(马达),并且由于驱动源(马达)的驱动,辅助辊能够沿方向S对应于介质支撑辊400移动。因此,能够任意地设定介质支撑辊400与辅助辊450a和450b之间的相对位置。以这种方式,通过任意地改变纸RP的运送路径的弯曲区域H的弯曲形状而能够对于所运送的纸RP设定合适的运送路径。另外,通过改变介质支撑辊400与辅助辊450a和450b之间的相对位置,能够改变纸RP与介质支撑辊400的周面400a之间的接触量,能够调节摩擦量,并且能够调节纸RP在介质支撑辊400的周面400a上的保持力。
另外,构造为使得辅助辊450的直径小于介质支撑辊400的直径。以这种方式,能够节省空间。另外,根据变形例,通过驱动介质支撑辊400来运送纸RP。具体地,构造为使得介质支撑辊400连接至驱动源(马达),并且介质支撑辊由于驱动源(马达)的驱动而旋转。以这种方式,纸RP使用介质支撑辊400和辅助辊450而能够被夹紧,并且沿着介质支撑辊400的周面400a和辅助辊450的周面向位于运送方向F的下游侧的介质夹紧单元17侧运送。因此,根据变形例的辅助辊450并非随着介质支撑辊400的旋转而被驱动的辊。即,未使用介质支撑辊400和辅助辊450来夹住纸RP。具体地,辅助辊450为当纸RP由于介质支撑辊400的周面400a与纸RP之间的摩擦而沿运送方向F移动时旋转的辊。
另外,介质夹紧单元17与介质支撑辊400之间的运送路径构造为弯曲运送路径。具体地,使纸RP的运送中继并且位于运送路径中途的中继辊51和52布置在介质夹紧单元17与介质支撑辊400之间,并且纸RP被运送通过中继辊51和52的附近。以这种方式,从供纸单元13经由介质支撑辊400从高部分向低部分运送的纸RP的运送方向F从中继辊51和52的附近起改变为朝向介质夹紧单元17的沿水平方向的运送方向F。另外,类似于第一实施例和第二实施例的中继辊,中继辊51和52起到调整单元的作用,所述调整单元调整使得所运送的纸RP在弯曲路径中不会不必要地进入弯曲路径的内侧。纸RP在弯曲路径上松弛;然而,优选的是将纸RP的松弛量调节为不与中继辊51和52接触的程度。以这种方式,能够减小当纸RP与中继辊51和52接触时引起的对运送的影响。另外,由于纸RP经由介质夹紧单元17与介质支撑辊400之间的弯曲路径从高部分向低部分运送,所以能够以悬浮的状态运送纸RP,并且能够使纸在运送时不与布置在运送路径的下侧的构件,或者纸RP的支撑单元接触。出于该原因,不仅能够减小当张力施加至在运送方向F上比介质支撑辊400更上游的那侧的纸RP时引起的影响,还能够减小当纸RP与在运送方向F上比介质支撑辊400更下游的那侧的各种构件接触时引起的对运送的影响。
另外,在变形例中,通过执行介质支撑辊400的驱动控制能够调节介质夹紧单元17与介质支撑辊400之间的纸RP的松弛量。以这种方式,在使介质夹紧单元17与介质支撑辊400之间的纸松弛的同时能够运送纸RP。因此,由于张力未施加至介质夹紧单元17与介质支撑辊400之间的纸RP,所以能够容易地减小纸RP在宽度方向上的运送量的差异。
接下来,将描述记录装置的控制单元的构造。图10为图示出记录装置的控制单元的构造的框图。如图10所示,控制单元100包括指令单元130、驱动单元140、显示驱动单元150以及输入检测单元160。另外,控制单元100的构造与第一实施例中的相同,所以省略其描述,并且将描述不同的部分。具体地,驱动单元140的第二马达驱动单元144控制连接至介质支撑辊400的第二马达的驱动。另外,第六马达驱动单元148控制连接至可移动单元460的第六马达的驱动。
另外,由于控制单元100的这样的构造,能够控制各种单元。例如,通过执行连接至供纸单元13的第一马达的驱动控制、连接至介质支撑辊400的第二马达的驱动控制以及连接至送纸辊17a的第三马达的驱动控制,能够通过从供纸单元13(辊体)拉出纸RP而沿运送方向F运送纸RP。在该情况下,控制使得使用介质支撑辊400在运送方向F上运送的纸RP的送出量大于使用介质夹紧单元17的送纸辊17a在运送方向F上运送的纸RP的送出量。另外,通过执行连接至可移动单元460的第六马达的驱动控制,辅助辊450a和450b被控制为以便沿朝向介质支撑辊400的方向S移动。以这种方式,使用介质支撑辊400和辅助辊450能够任意地改变对于纸RP的夹紧力。另外,能够任意地设定由辅助辊450a和450b以及介质支撑辊400形成的弯曲区域H(H1,H2,H3)。即,能够控制介质支撑辊400中的纸RP的缠绕量。
如上所述,根据变形例,能够获得以下效果。
纸RP在使用辅助辊450被压在介质支撑辊400上的同时沿着介质支撑辊400的周面400a运送。以这种方式,纸RP在绕介质支撑辊400缠绕的同时被运送,并且此时由于介质支撑辊400与纸RP之间的摩擦,减小了纸RP的宽度方向上的运送量的差异。另外,由于纸RP被运送而没有在运送单元2b中被夹紧,所以能够抑制压痕在纸RP上的产生。
变形例3
在变形例2中,布置有用于将纸RP压在介质支撑辊400上的辅助辊450;然而,并不限于该构造。例如,可以是省略辅助辊450的构造。图11为图示出根据变形例的记录装置的构造的示意图。如图11所示,记录装置1d包括主体壳体12、运送单元2c等。具体地,记录装置1d包括纸RP以辊形缠绕所围绕的辊体(供纸单元13)、记录单元15和介质支撑辊400,并且具有纸RP沿介质支撑辊400的周面400a运送的构造。另外,供纸单元13布置在记录装置1d的下部,并且从供纸单元13的辊体拉出的纸RP经由布置在比供纸单元13高的部分的介质支撑辊400而朝向布置在介质支撑辊400的下部的介质夹紧单元17运送。即,在介质支撑辊400的周面400a上弯曲的弯曲区域H形成在纸RP的运送路径中。另外,纸RP经由弯曲区域H运送。由于纸RP通过使运送路径弯曲而使用介质支撑辊400缠绕,所以减小了在纸RP的宽度方向上的运送量的差异,并且能够改进运送纸RP时的平直度。以这种方式,类似于上述实施例的效果,能够抑制运送时纸RP的压痕等的出现。另外,通过执行介质支撑辊400的驱动控制而能够调节介质夹紧单元17与介质支撑辊400之间的纸RP的松弛量。以这种方式,如图11所示,在使介质夹紧单元17与介质支撑辊400之间的纸松弛的同时能够运送纸RP。以这种方式,由于张力未施加至介质夹紧单元17与介质支撑辊400之间的纸RP,所以能够容易地减小纸RP的在宽度方向上的运送差异。
变形例4
根据第一实施例和第二实施例的介质支撑单元40由第一辊40a和第二辊40b构成;然而,并不限于此构造。例如,介质支撑单元40可以为轮子等。在该情况下,例如,纸RP通过轮子运送。由于纸RP被轮子支撑(缠绕),所以能够改进纸RP的运送方向F上的平直度。
变形例5
根据第二实施例的松弛量检测单元60被设定为通过与所运送的纸RP接触而执行检测的接触型检测单元;然而,并不限于此构造。例如,可以为以非接触方法检测松弛量的构造。通过这样做,能够抑制由于接触而能够附着的划痕、污垢等,且不向纸RP施加不必要的负荷。
附图标记列表
1,1a,1b,1c,1d 记录装置
2,2a,2b,2c 运送单元
12 主体壳体
13 供纸单元
13a 辊轴
15 记录单元
17 介质夹紧单元
17a 送纸辊
17b 压纸辊
18 滑架
19 液体喷射头
20 台板
40 介质支撑单元
40a 第一辊
40b 第二辊
41 偏心凸轮
41a 偏心轴
51,52 中继辊
60 松弛量检测单元
66 接触辊
100 控制单元
400 介质支撑辊
400a 周面
450,450a,450b 辅助辊
460 可移动单元
W 弯曲路径
Claims (5)
1.一种记录装置,其运送介质,并且对于所运送的介质执行记录,所述装置包括:
记录单元;
介质夹紧单元,其沿运送方向设置在比所述记录单元更上游的那侧,并且夹紧其间的介质;
介质支撑单元,其沿运送方向设置在比所述介质夹紧单元更上游的那侧,并且支撑介质;以及
调整单元,其在运送介质的运送路径中位于所述介质夹紧单元与所述介质支撑单元之间,介质经由所述介质夹紧单元与所述介质支撑单元之间的弯曲路径从高部分向低部分运送,所述调整单元调整介质,使得介质不会进入所述介质夹紧单元与所述介质支撑单元之间的所述弯曲路径的内侧,其中:
介质在所述介质夹紧单元与所述介质支撑单元之间松弛。
2.根据权利要求1所述的记录装置,
其中所述介质从以辊形缠紧的辊体拉出,并且
其中所述介质的运送量被调节为使得预定的张力施加至所述辊体与所述介质支撑单元之间的介质。
3.根据权利要求1或2所述的记录装置,
其中所述介质夹紧单元与所述介质支撑单元之间的介质的松弛量通过驱动所述介质支撑单元而调节。
4.根据权利要求1或2所述的记录装置,
其中所述介质支撑单元构造为夹紧其间的介质,并且所述介质支撑单元的夹紧力能够改变。
5.根据权利要求3所述的记录装置,
其中所述介质支撑单元构造为夹紧其间的介质,并且所述介质支撑单元的夹紧力能够改变。
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-180934 | 2014-09-05 | ||
| JP2014-180933 | 2014-09-05 | ||
| JP2014180932 | 2014-09-05 | ||
| JP2014-180932 | 2014-09-05 | ||
| JP2014180934 | 2014-09-05 | ||
| JP2014180933 | 2014-09-05 | ||
| JP2015-120867 | 2015-06-16 | ||
| JP2015120867A JP6601005B2 (ja) | 2014-09-05 | 2015-06-16 | 記録装置 |
| PCT/JP2015/004506 WO2016035347A1 (en) | 2014-09-05 | 2015-09-04 | Recording apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106604883A CN106604883A (zh) | 2017-04-26 |
| CN106604883B true CN106604883B (zh) | 2020-04-14 |
Family
ID=55757097
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580047836.XA Active CN106604883B (zh) | 2014-09-05 | 2015-09-04 | 记录装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10562728B2 (zh) |
| EP (1) | EP3194315B1 (zh) |
| JP (1) | JP6601005B2 (zh) |
| CN (1) | CN106604883B (zh) |
| TW (1) | TWI658982B (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWM544508U (zh) * | 2015-12-01 | 2017-07-01 | 耐克創新有限合夥公司 | 在製造製程中的材料張緊系統 |
| JP6922233B2 (ja) | 2017-01-31 | 2021-08-18 | セイコーエプソン株式会社 | 画像読取装置 |
| US11801696B2 (en) * | 2019-12-16 | 2023-10-31 | Brother Kogyo Kabushiki Kaisha | Sheet conveyor and image forming system |
| US11938699B2 (en) | 2021-07-07 | 2024-03-26 | Brown Llc | Methods and systems for producing pressware |
| US11919270B2 (en) | 2021-07-07 | 2024-03-05 | Brown Llc | Methods and systems for producing pressware |
| US11945670B2 (en) * | 2021-07-07 | 2024-04-02 | Brown Llc | Methods and systems for producing pressware |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4937001A (zh) | 1972-08-20 | 1974-04-06 | ||
| US4805501A (en) * | 1986-10-15 | 1989-02-21 | Fobelmac Consulting Ag | System for processing a web |
| JP2000327190A (ja) | 1999-05-19 | 2000-11-28 | Copyer Co Ltd | 画像形成装置 |
| JP2002080153A (ja) * | 2000-09-04 | 2002-03-19 | Dainippon Printing Co Ltd | ジグザグ折り状ウェブの引き出し装置 |
| JP3778264B2 (ja) | 2001-01-31 | 2006-05-24 | セイコーエプソン株式会社 | ロール紙弛み形成装置及び該ロール紙弛み形成装置を備えた記録装置 |
| JP3877592B2 (ja) | 2001-12-27 | 2007-02-07 | 株式会社サトー | プリンターの印字トルク切替え装置 |
| US6964392B1 (en) * | 2003-06-24 | 2005-11-15 | Matsunaga Douglas S | Variable strip tensioner |
| JP4575000B2 (ja) * | 2004-02-26 | 2010-11-04 | セイコーインスツル株式会社 | 熱活性化装置およびプリンタ装置 |
| ES2358350T3 (es) * | 2005-10-26 | 2011-05-09 | Mitsubishi Electric Corporation | Impresora. |
| JP4937001B2 (ja) | 2007-06-01 | 2012-05-23 | Jfeスチール株式会社 | 印刷装置 |
| JP2008302536A (ja) * | 2007-06-06 | 2008-12-18 | Canon Inc | 用紙搬送装置及び画像形成装置 |
| JP5293929B2 (ja) * | 2008-03-05 | 2013-09-18 | セイコーエプソン株式会社 | ロール状被記録材の搬送装置、スピンドルモータのトルク設定方法及び記録装置 |
| JP5459694B2 (ja) * | 2008-05-23 | 2014-04-02 | 株式会社セイコーアイ・インフォテック | 記録装置 |
| JP5422920B2 (ja) * | 2008-05-23 | 2014-02-19 | セイコーエプソン株式会社 | 記録装置 |
| JP4742155B2 (ja) * | 2009-03-18 | 2011-08-10 | キヤノン株式会社 | シート供給装置、及び該シート供給装置を備えたプリンタ |
| JP5560896B2 (ja) * | 2009-09-04 | 2014-07-30 | 株式会社リコー | 搬送装置及びこの搬送装置を備えた画像形成装置 |
| JP5637700B2 (ja) * | 2010-02-26 | 2014-12-10 | キヤノン株式会社 | シート搬送装置および記録装置 |
| JP2011251788A (ja) * | 2010-05-31 | 2011-12-15 | Toshiba Tec Corp | 用紙排出装置、用紙排出方法、画像形成装置および画像形成方法 |
| CN102667317B (zh) * | 2010-07-30 | 2014-11-26 | 索尼公司 | 照明单元和显示装置 |
| JP5671875B2 (ja) * | 2010-08-12 | 2015-02-18 | セイコーエプソン株式会社 | 印刷装置、印刷方法、及び、プログラム |
| JP5724280B2 (ja) | 2010-10-06 | 2015-05-27 | セイコーエプソン株式会社 | プリンター、及び、印刷方法 |
| JP2012162379A (ja) * | 2011-02-09 | 2012-08-30 | Seiko Epson Corp | 印刷装置、及び、印刷方法 |
| JP5372042B2 (ja) * | 2011-02-14 | 2013-12-18 | キヤノン株式会社 | シート搬送装置およびプリント装置 |
| IT1403980B1 (it) * | 2011-02-17 | 2013-11-08 | Custom Engineering Spa Ora Custom Spa | Stampante di biglietti |
| JP2012218936A (ja) | 2011-04-14 | 2012-11-12 | Canon Inc | ロールシート搬送装置及びロールシートの搬送方法 |
| JP5921254B2 (ja) * | 2011-04-15 | 2016-05-24 | キヤノン株式会社 | 記録装置、搬送装置、及び搬送制御方法 |
| TWI457267B (zh) * | 2011-05-30 | 2014-10-21 | Seiko Epson Corp | 搬送裝置、印刷裝置、及搬送方法 |
| CN102815557B (zh) | 2011-06-08 | 2015-06-03 | 精工爱普生株式会社 | 输送装置、印刷装置以及输送方法 |
| JP5871503B2 (ja) * | 2011-07-27 | 2016-03-01 | キヤノン株式会社 | 搬送装置 |
| JP5882671B2 (ja) * | 2011-10-21 | 2016-03-09 | キヤノン株式会社 | 搬送装置 |
| JP5858724B2 (ja) * | 2011-10-21 | 2016-02-10 | キヤノン株式会社 | 搬送装置 |
| JP5948809B2 (ja) * | 2011-11-18 | 2016-07-06 | セイコーエプソン株式会社 | ターゲット搬送装置及び液体噴射装置 |
| US8740337B2 (en) * | 2012-07-31 | 2014-06-03 | Eastman Kodak Company | Wrinkle elimination for solid inkjet web printer |
| JP6014478B2 (ja) * | 2012-12-05 | 2016-10-25 | キヤノン株式会社 | 記録装置及びロール紙の搬送制御方法 |
-
2015
- 2015-06-16 JP JP2015120867A patent/JP6601005B2/ja active Active
- 2015-09-02 TW TW104129050A patent/TWI658982B/zh active
- 2015-09-04 US US15/508,858 patent/US10562728B2/en active Active
- 2015-09-04 CN CN201580047836.XA patent/CN106604883B/zh active Active
- 2015-09-04 EP EP15766664.5A patent/EP3194315B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| TW201617279A (zh) | 2016-05-16 |
| CN106604883A (zh) | 2017-04-26 |
| EP3194315A1 (en) | 2017-07-26 |
| US10562728B2 (en) | 2020-02-18 |
| US20170253452A1 (en) | 2017-09-07 |
| JP6601005B2 (ja) | 2019-11-06 |
| TWI658982B (zh) | 2019-05-11 |
| JP2016055623A (ja) | 2016-04-21 |
| EP3194315B1 (en) | 2019-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106604883B (zh) | 记录装置 | |
| JP2017105130A (ja) | 処理液塗布装置及び画像形成システム | |
| JP5166694B2 (ja) | シート処理装置 | |
| CN107921794B (zh) | 打印设备 | |
| US9505576B2 (en) | Recording apparatus and method of introducing recording medium to transport path | |
| JP5626605B2 (ja) | 印刷装置及び印刷方法 | |
| WO2016035347A1 (en) | Recording apparatus | |
| US9610789B2 (en) | Recording apparatus | |
| JP2011190030A (ja) | 記録装置 | |
| JP2011073810A (ja) | 記録装置 | |
| US10189287B2 (en) | Printing apparatus | |
| US9022554B2 (en) | Liquid ejecting apparatus and medium transport apparatus with an inter-axis adjustment mechanism | |
| JP2011046519A (ja) | 用紙搬送装置及び画像形成装置 | |
| JP4300912B2 (ja) | 記録媒体搬送装置及び画像記録装置 | |
| JP2009214996A (ja) | 記録装置及び記録媒体の搬送方法 | |
| JP2014148175A (ja) | 記録装置 | |
| JP2013103790A (ja) | 記録装置及び記録方法 | |
| JP5888398B2 (ja) | 記録装置 | |
| JP6457300B2 (ja) | 媒体の搬送機構 | |
| JPH10129056A (ja) | インクジェット記録装置 | |
| JP4839916B2 (ja) | 画像記録装置 | |
| JP2024044432A (ja) | 巻取装置及び印刷装置 | |
| JP2019093688A (ja) | 媒体支持機構、印刷装置、および印刷装置の制御方法 | |
| JP2017136707A (ja) | 記録装置及び記録装置の制御方法 | |
| JP2005324929A (ja) | 記録装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |