BR112012019896B1 - Dispositivo de transporte de peças - Google Patents
Dispositivo de transporte de peças Download PDFInfo
- Publication number
- BR112012019896B1 BR112012019896B1 BR112012019896-3A BR112012019896A BR112012019896B1 BR 112012019896 B1 BR112012019896 B1 BR 112012019896B1 BR 112012019896 A BR112012019896 A BR 112012019896A BR 112012019896 B1 BR112012019896 B1 BR 112012019896B1
- Authority
- BR
- Brazil
- Prior art keywords
- support
- parts
- transport path
- carriage
- transport
- Prior art date
Links
- 238000006073 displacement reaction Methods 0.000 claims description 57
- 230000032258 transport Effects 0.000 description 190
- 230000036544 posture Effects 0.000 description 42
- 238000011144 upstream manufacturing Methods 0.000 description 18
- 230000007246 mechanism Effects 0.000 description 11
- 230000002093 peripheral effect Effects 0.000 description 5
- 230000001174 ascending effect Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000003319 supportive effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D65/00—Designing, manufacturing, e.g. assembling, facilitating disassembly, or structurally modifying motor vehicles or trailers, not otherwise provided for
- B62D65/02—Joining sub-units or components to, or positioning sub-units or components with respect to, body shell or other sub-units or components
- B62D65/18—Transportation, conveyor or haulage systems specially adapted for motor vehicle or trailer assembly lines
Abstract
dispositivo de transporte de peças a serem usinadas. trata-se de um dispositivo de transporte de peças a serem usinadas que emprega um corpo de deslocamento de transporte de peças a serem usinadas 1 composto por um carro de suporte de peças a serem usinadas 2 que suporta uma porção central longitudinal de uma peça a ser usinada w e dois carros auxiliares 3 e 4 posicionados abaixo de ambas as porções de extremidade longitudinais da peça a ser usinada w. o carro de suporte de peças a serem usinadas 2 inclui um meio de suporte de alta posição de peças a serem usinadas 5 comutável entre uma postura de elevação de suportar a peça a ser usinada w em uma posição alta e uma postura dobrada. os dois carros auxiliares 3 e 4 incluem meios de suporte de baixa posição de peças a serem usinadas 16 e 17 para suportar a parte dianteira e a parte traseira em dois locais na direção longitudinal da peça a ser usinada w em uma altura mais alta que os meios de suporte de alta posição a serem usinadas 5 na postura dobrada.
Description
[001] A presente invenção refere-se a um Dispositivo de transporte de peças cuja trajetória de transporte de peças inclui uma primeira trajetória de transporte e uma segunda trajetória de transporte ramificada perpendicular e horizontalmente em relação à primeira trajetória de transporte.
[002] O dispositivo de transporte de peças anterior é conhecido em linhas de montagem de automóveis, por exemplo. Nas linhas de montagem de automóveis, a primeira trajetória de transporte é usada como uma linha de compensação ou linha final onde se realiza um trabalho em relação a uma região relativamente baixa da periferia de uma carroceria do automóvel tendo sido suportada sobre um corpo de deslocamento de transporte de peças, conduzindo-se o corpo de deslocamento de transporte de peças a se deslocar em uma orientação longitudinal paralela à direção dianteira-traseira da carroceria do automóvel suportada. A segunda trajetória de transporte é usada como uma linha de chassi onde se realiza um trabalho de mon-tagem de um motor ou de uma unidade de eixo por baixo da carroceria do automóvel tendo sido suportada sobre o corpo de deslocamento de transporte de peças, conduzindo-se o corpo de deslocamento de transporte de peças a se deslocar em uma orientação transversal ortogonal à direção dianteira-traseira da carroceria do automóvel suportada. Assim como o corpo de deslocamento de transporte de peças útil em tal Dispositivo de transporte de peças, conhece-se um carro de transporte de comprimento variável dotado de elementos de sustentação auxiliares antes e após um carro de suporte de peças que se move de modo deslizante para dentro e para fora conforme descrito no Documento de Patente 1 e um carro de transporte de comprimento variável que suporta de modo articulado os elementos de sustentação auxiliares antes e após um carro de suporte de peças de modo a elevar e rebaixar.
[003] Documento de Patente 1: Pedido de Patente Japonês Publicado Não- Examinado No. H04-362459
[004] No entanto, no corpo de deslocamento de transporte de peças de com-primento variável convencional e conhecido conforme descrito anteriormente, não apenas a estrutura do corpo de deslocamento de transporte de peças requerida em grandes números de todo o equipamento se torna complicada, desse modo, levando a altos custos do equipamento como um todo, mas também, o tamanho dos elemen-tos de sustentação auxiliares é inevitavelmente restrito visto que os elementos de sustentação auxiliares são acomodados em um corpo principal do carro ou comuta-dos em uma postura de suspensão, de tal modo que a efetividade dos elementos de sustentação auxiliares seja reduzida. Além disso, um meio para retirar e captar os elementos de sustentação auxiliares em relação ao corpo principal do carro e contro-le que serve para operar automaticamente o meio se tornam necessários em um ponto de ramificação a partir da primeira trajetória de transporte até a segunda traje-tória de transporte ou em um ponto de encontro a partir da segunda trajetória de transporte até a primeira trajetória de transporte. Neste sentido, os custos de todo o equipamento também se tornam significativamente maiores. Com a finalidade de solucionar estes problemas, propõe-se um dispositivo de transporte no qual o corpo de deslocamento de transporte de peças é composto por um carro de suporte de peças que suporta uma porção central longitudinal de uma carroceria do automóvel cuja direção longitudinal é paralela à primeira trajetória de transporte e dois carros auxiliares dianteiro e traseiro que unem a parte dianteira e traseira na direção de deslocamento da primeira trajetória de transporte do carro de suporte de peças e são posicionados abaixo de ambas as porções de extremidade longitudinais da car- roceria do automóvel, e o carro de suporte de peças e os dois carros auxiliares são conduzidos para se deslocarem linear e integralmente sobre a primeira trajetória de transporte, e apenas o carro de suporte de peças que foi lateralmente extraído entre os dois carros auxiliares dianteiro e traseiro é conduzido para se deslocar perpendi-cular e horizontalmente sobre a segunda trajetória de transporte.
[005] No novo dispositivo de transporte de peças onde o corpo de desloca-mento de transporte de peças é composto por um carro de suporte de peças e dois carros auxiliares dispostos antes e após o carro de suporte de peças conforme des-crito anteriormente, também, sobre a primeira trajetória de transporte, a carroceria do automóvel precisa ser suportada em uma posição baixa onde uma variedade de trabalhos em relação à periferia da carroceria do automóvel (a peça) podem ser fa-cilmente realizados, e sobre a segunda trajetória de transporte, a carroceria do au-tomóvel precisa ser suportada em uma posição alta o suficiente para que um operá-rio entre sob a carroceria do automóvel. Com a finalidade de solucionar tais proble-mas, concebe-se na proposta anterior que um meio de suporte de peça proporcio-nado no carro de suporte de peças é configurado para que seja capaz de suportar a carroceria do automóvel em qualquer altura a partir de uma posição alta até uma posição baixa.
[006] Com a finalidade de configurar de tal modo que a carroceria do auto-móvel (a peça) seja suportada em qualquer altura a partir de uma posição baixa até uma posição alta por um meio de suporte de peças conforme descrito anteriormente, por exemplo, um meio de suporte de peça em elevação incluindo ferramentas de suporte de peças que se movem para cima e para baixo junto com colunas erguidas em ambas as laterais da carroceria do automóvel se torna necessário. Embora o meio de suporte de peça em elevação possa suportar a carroceria do automóvel em uma posição baixa próxima a uma superfície de piso do carro, as colunas de um tamanho grande colocadas em ambas as laterais da carroceria do automóvel constituem um obstáculo a uma variedade de trabalhos em relação à periferia da carroceria do automóvel. Como um assunto óbvio, é concebível que as colunas sejam integradas com as ferramentas de suporte de peças e configuradas de modo que sejam verticalmente móveis em relação à superfície de piso do carro sob sua carroceria de suporte do automóvel. No entanto, existem muitos problemas práticos, tal como um grande espaço sob o carro se torna necessário, de tal modo que o carro não possa ter uma estrutura de piso baixo ou um fosso profundo com formato de ranhura preci-sa ser formado ao longo da trajetória de deslocamento.
[007] A presente invenção propõe um Dispositivo de transporte de peças ca-paz de solucionar os problemas convencionais supramencionados. O Dispositivo de transporte de peças de acordo com a presente invenção conforme apresentado na reivindicação 1 inclui, descrito com símbolos de referência entre parênteses das mo-dalidades que serão descritas posteriormente, uma trajetória de transporte de peças que inclui uma primeira trajetória de transporte (L1) e uma segunda trajetória de transporte (L3) ramificada perpendicular e horizontalmente em relação à primeira trajetória de transporte (L1), um corpo de deslocamento de transporte de peças (1) composto por um carro de suporte de peças (2) que suporta uma porção central lon-gitudinal de uma peça (W) cuja direção longitudinal é paralela à primeira trajetória de transporte (L1) e dois carros auxiliares (3 e 4) que unem a parte dianteira e a parte traseira em uma direção de deslocamento da primeira trajetória de transporte (L1) do carro de suporte de peças (2) e são posicionados abaixo de ambas as porções de extremidade longitudinal da peça (W), um meio de condução do corpo de desloca-mento de transporte de peças (30) justaposto sobre a primeira trajetória de transporte (L1) para conduzir o carro de suporte de peças (2) e os carros auxiliares (3 e 4) de modo que se desloquem integralmente, um meio de divergência de carro (32a, 32b, e 33) disposto em um ponto de ramificação entre a primeira trajetória de transporte (L1) e a segunda trajetória de transporte (L3) com a finalidade de deixar os dois carros auxiliares (3 e 4) sobre a primeira trajetória de transporte (L1) e divergir e introduzir apenas o carro de suporte de peças (2) perpendicular e horizontalmente na segunda trajetória de transporte (L3), e um meio de condução do carro de suporte de peças (39) justaposto sobre a segunda trajetória de transporte (L3) para conduzir o carro de suporte de peças (2) de modo que se desloque perpendicular e horizontalmente em relação à direção de deslocamento do carro de suporte de peças (2) sobre a primeira trajetória de transporte (L1), sendo que o carro de suporte de peças (2) é dotado de um meio de suporte de alta posição de peças (5) configurado para que seja comutável entre uma postura de elevação de suportar a peça (W) em uma posição alta e uma postura dobrada caída sob a peça (W) e sobre o carro de suporte de peças (2), e os dois carros auxiliares (3 e 4) são dotados de um meio de suporte de baixa posição de peças (16 e 17) configurado para suportar individualmente dois locais dianteiro e traseiro na direção longitudinal da peça (W) sob a peça (W) e em uma altura maior do que o meio de suporte de alta posição de peças (5) na postura dobrada.
[008] Quando a presente invenção descrita anteriormente for realizada, mais especificamente, de acordo com a reivindicação 2, a mesma pode ser configurada de tal modo que o meio de suporte de alta posição de peças (5) sobre o carro de suporte de peças (2) seja movido para cima e para baixo através de um elevador localizado ao longo da trajetória de deslocamento enquanto suporta a peça (W) e o meio de suporte de alta posição de peças (5) é dotado de um meio de travamento (15) para travar na postura de elevação de suportar a peça (W) em uma posição alta.
[009] O meio de suporte de baixa posição de peças (16 e 17) sobre os carros auxiliares (3 e 4) pode suportar diretamente a peça (W). No entanto, de acordo com a reivindicação 3, o meio de suporte de baixa posição de peças (16 e 17) pode ser configurado para suportar a peça (W) através do meio de suporte de alta posição de peças (5) sobre o carro de suporte de peças (2). Além disso, de acordo com a rei-vindicação 4, o meio de suporte de baixa posição de peças (16 e 17) sobre os carros auxiliares (3 e 4) pode ter uma estrutura de altura de suporte variável que pode su-portar a peça (W) em uma pluralidade de alturas maiores que o meio de suporte de alta posição de peças (5) na postura dobrada. De acordo com a reivindicação 5, a mesma pode ser configurada de tal modo que o meio de suporte de baixa posição de peças (16 e 17) seja composto por membros de suporte verticalmente móveis (18) e estes membros de suporte (18) sejam mantidos em uma altura de suporte de peças por trilhos de came (66a a 67b) dispostos no lado da trajetória de desloca-mento.
[010] Adicionalmente, o meio de suporte de baixa posição de peças (16 e 17) sobre os carros auxiliares (3 e 4) pode ser dotado de corpos de suporte de peças (68 a 70) que são suportados de modo articulado sobre os carros auxiliares (3 e 4) de modo que sejam elevados e rebaixados. Neste caso, de acordo com a reivindicação 6, os corpos de suporte de peças (68 a 70) podem ser continuamente dotados de porções de contato (68b a 70b) que estão em contiguidade com o carro de suporte de peças (2) adjacente quando os corpos de suporte de peças (68 a 70) estiverem em uma postura de suporte de peças.
[011] De acordo com a configuração da presente invenção em relação à rei-vindicação 1, um transbordo da peça (a carroceria do automóvel) entre a primeira e a segunda trajetórias de transporte se torna desnecessário utilizando-se a primeira trajetória de transporte como uma linha de compensação ou como uma linha final de uma linha de montagem de automóvel e a segunda trajetória de transporte como uma linha de chassi. Ademais, a peça é transportada por um longo corpo de deslo-camento de transporte de peças formado pelo carro de suporte de peças e pelos dois carros auxiliares dianteiro e traseiro adjacentes a este sobre a primeira trajetória de transporte onde a peça é carregada longitudinalmente em paralelo a uma direção de comprimento dianteira-traseira. Portanto, um piso de trabalho grande o suficiente sobre toda a periferia ad peça pode ser garantido sobre o corpo de deslocamento de transporte de peças, e trabalhos necessários sobre a primeira trajetória de transporte em relação à periferia da peça podem ser realizados segura e facilmente por um operário que segura o corpo de deslocamento de transporte de peças. Na segunda trajetória de transporte, apenas o carro de suporte de peças curto no comprimento dianteiro-traseiro com os dois carros auxiliares dianteiro e traseiro removidos suporta e transporta a peça enquanto orientada transversalmente. Com resultado, também se torna possível realizar um trabalho sem fazer com que os carros de fixação carre- gados a serem colocados sob a parte dianteira e traseira da peça entrem e saiam do carro de transporte.
[012] Ademais, de acordo com a configuração da presente invenção, dois lo-cais na direção longitudinal dianteira-traseira da peça podem ser suportados por bai-xo da peça individualmente pelo meio de suporte de baixa posição de peças propor-cionados aos dois carros auxiliares dianteiro e traseiro e o meio de suporte de alta posição de peças proporcionado ao carro de suporte central de peças pode ser do-brado sob a peça, quando a peça for suportada em uma altura baixa na primeira tra-jetória de transporte. Em outras palavras, o carro de suporte de peças pode ser do-tado de tal meio de suporte de peças que pode suportar a peça em uma posição alta apenas quando estiver na postura de elevação e pode ser dobrado sob a peça quando não suportar a peça e que não requer colunas guia de elevação. Como re-sultado, tais colunas guia de elevação, etc., que constituem um obstáculo para tra-balhos não precisam ser colocadas na periferia da peça que foi suportada em uma posição baixa. Uma variedade de trabalhos em relação à periferia da peça que foi suportada em uma posição baixa pode ser realizada segura e facilmente.
[013] Quando a peça suportada em uma posição alta for transportada per-pendicular e horizontalmente sobre a segunda trajetória de transporte, os meios de suporte de baixa posição de peças que suporta os dois locais na direção longitudinal dianteira-traseira da peça são removidos juntos com os carros auxiliares. Portanto, os meios de suporte de baixa posição de peças não constituem um obstáculo a uma variedade de trabalhos realizados por um operário que entra sob a peça como no caso quando os meios de suporte de baixa posição de peças forem colocados sobre a superfície de piso do carro sob ambas as porções de extremidade dianteira e tra-seira da peça suportada em uma posição alta. Uma variedade de trabalhos à parte inferior da peça suportada em uma posição alta também pode ser realizada segura e facilmente.
[014] Nota-se que os meios de suporte de alta posição de peças sobre o carro de suporte de peças podem ser comutados entre as posturas dobradas e de ele- vação sendo acionadas por atuadores justapostos. De acordo com a configuração em relação à reivindicação 2, no entanto, não são necessários atuadores de acio-namento para o meio de suporte de alta posição de peças sobre o carro de suporte de peças, e, portanto, a estrutura é simples e pode ser realizada de modo pouco dispendioso. Os meios de suporte de alta posição de peças podem ser configurados de modo que tenham uma estrutura onde as porções de suporte de peça se movam verticalmente para cima e para baixo e suportem a peça mesma na postura dobrada. Neste caso, a altura de suporte de peça dos meios de suporte de alta posição de peças na postura dobrada é designada para que seja a menor altura inferior àquela dos meios de suporte de baixa posição de peças dos carros auxiliares. Utilizando-se apropriadamente os meios de suporte de alta posição de peças do carro de suporte de peças e os meios de suporte de baixa posição de peças dos carros auxiliares, a peça pode ser suportada em posições baixas de pelo menos dois níveis superior e inferior.
[015] Quando os meios de suporte de baixa posição de peças sobre os carros auxiliares forem configurados para suportarem diretamente a peça, a peça precisa ser dotada de uma porção suportada a ser suportada pelos meios de suporte de alta posição de peças e uma porção suportada a ser suportada pelos meios de suporte de baixa posição de peças. De acordo com a configuração em relação à rei-vindicação 3, no entanto, elimina-se a necessidade de proporcionar à peça uma por-ção suportada a ser suportada pelos meios de suporte de baixa posição de peças. Como resultado, facilita-se a implementação do equipamento da presente invenção.
[016] Além disso, conforme descrito anteriormente, a peça pode ser suportada em posições baixas de pelo menos dois níveis superior e inferior se os meios de suporte de alta posição de peças forem configurados de modo que sejam capazes de suportar a peça mesmo quando estiverem na postura dobrada. No entanto, mesmo na estrutura onde o meio de suporte de alta posição de peças não pode suportar a peça quando estiver na postura dobrada, a peça pode ser suportada em uma pluralidade de alturas maiores que os meios de suporte de alta posição de pe- ças na postura dobrada de acordo com a configuração em relação à reivindicação 4. Portanto, a altura de suporte da peça é alterada de acordo com os detalhes de tra-balhos à periferia da peça, e a funcionalidade em relação à periferia da peça pode ser aperfeiçoada.
[017] Os meios de suporte de baixa posição de peças dos carros auxiliares podem ser configurados de modo que sejam variáveis em uma altura de suporte da peça por atuadores de acionamento justapostos ou comutáveis entre uma postura de suporte da peça e uma postura de não-suporte da peça (uma postura retraída). De acordo com a configuração em relação à reivindicação 5, no entanto, não apensa os atuadores de acionamento para os meios de suporte de baixa posição de peças se tornam desnecessários sobre os carros auxiliares, mas também, a altura de suporte da peça pode se tornar variável pela altura dos trilhos de came. Além disso, não há necessidade de parar temporariamente os carros auxiliares em uma posição fixa correspondente aos atuadores de acionamento no lado da trajetória de deslocamento conforme no caso quando os atuadores de acionamento para os meios de suporte de baixa posição de peças forem proporcionados no lado da trajetória de deslocamento. A altura de suporte da peça dos meios de suporte de baixa posição de peças pode ser alterada durante o deslocamento dos carros auxiliares.
[018] Além disso, de acordo com a configuração em relação à reivindicação 6, os meios de suporte de baixa posição de peças podem ser facilmente constituídos por corpos de suporte de peças suportados de modo articulado sobre os carros auxi-liares de modo que sejam elevados e rebaixados. Adicionalmente, a carga que atua sobre as porções de extremidade dos carros auxiliares devido àqueles corpos de suporte de peças que suportam a peça é sustentada em ambas as porções de ex-tremidade dianteira e traseira do carro de suporte de peças, permitindo, assim, evitar que um grande momento de transformação seja exercido sobre os carros auxiliares. Portanto, a configuração dos carros auxiliares é simplificada e pode ser realizada de modo pouco dispendioso.
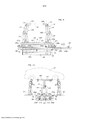
[019] A Figura 1 é uma vista de planta quando um corpo de deslocamento de transporte de peças estiver em uma primeira trajetória de transporte; A Figura 2A é uma vista lateral do mesmo; A Figura 2B é uma vista lateral que mostra um meio de conexão entre um car-ro de suporte de peças e os carros auxiliares do corpo de deslocamento de transporte de peças; A Figura 3 é uma vista lateral onde o carro de suporte de peças e os carros auxiliares dianteiros e traseiros do corpo de deslocamento de transporte de peças são separados uns dos outros; A Figura 4 é uma vista frontal que mostra o carro de suporte de peças do corpo de deslocamento de transporte de peças na primeira trajetória de transporte; A Figura 5 é uma vista frontal do carro auxiliar do mesmo; A Figura 6 é uma vista de planta que explica um esboço de todo o Dispositivo de transporte de peças; A Figura 7 é uma vista de planta que explica a ramificação e o encontro do carro de suporte de peças em um ponto de ramificação entre a primeira e a segunda trajetórias de transporte; A Figura 8 é uma vista lateral do mesmo; A Figura 9 é uma vista frontal do mesmo; A Figura 10 é uma vista frontal que mostra o carro de suporte de peças na segunda trajetória de transporte; A Figura 11 é uma vista lateral do mesmo; A Figura 12 é uma vista de planta do mesmo; A Figura 13A é uma vista lateral que mostra uma estrutura de um lado de uma das unidades do meio de suporte de alta posição de peças proporcionado no carro de suporte de peças; A Figura 13B é uma vista frontal do mesmo; A Figura 14 é uma vista de planta de todo um corpo de deslocamento de transporte de peças que mostra a segunda modalidade da presente invenção; A Figura 15 é uma vista frontal que mostra um carro auxiliar do mesmo; A Figura 16 é uma vista frontal de um carro auxiliar que mostra a terceira mo-dalidade da presente invenção; A Figura 17 é uma vista lateral de todo um corpo de deslocamento de trans-porte de peças do mesmo; e As Figuras 18A a 18C são vistas laterais que explicam as operações do meio de suporte de baixa posição de peças do mesmo.
[020] Conforme mostrado nas Figuras 1 a 3, um corpo de deslocamento de transporte de peças 1 nesta modalidade é constituído por um carro de suporte central de peças 2 e dois carros auxiliares 3 e 4 dispostos adjacentes à para dianteira e traseira em uma direção de deslocamento de uma primeira trajetória de transporte L1 do carro de suporte de peças 2. O carro de suporte de peças 2 tem um formato retangular horizontalmente longo em plano onde uma largura em uma direção lateral é maior que um comprimento na direção de deslocamento da primeira trajetória de transporte L1. O carro de suporte de peças 2 tem uma superfície superior instalada com um meio de suporte de alta posição de peças 5 para suportar uma peça (uma carroceria do automóvel) W em uma posição alta. O meio de suporte de alta posição de peças 5 é composto por um par de unidades de suporte de elevação esquerda e direita 6A e 6B respectivamente que suportam ambos as laterais da peça W. A peça W que foi suportada pelo meio de suporte de alta posição de peças 5 tem as porções de extremidade dianteira e traseira projetando-se para frente e para trás a partir do carro de suporte de peças 2. Além disso, garante-se um piso de trabalho com uma largura suficiente para um operário andar entre o meio de suporte de alta posição de peças 5 posicionado fora das laterais da peça W e ambas as laterais do carro de suporte de peças 2, quando visualizados em plano.
[021] Os dois carros auxiliares dianteiro e traseiro 3 e 4 têm o mesmo tamanho, e uma lateral largura destes é igual àquela do carro de suporte de peças 2 e um comprimento destes na direção de deslocamento da primeira trajetória de transporte L1 é longo o suficiente para se projetar de modo mais dianteiro e traseiro para fora do que ambas as extremidades dianteira e traseira da peça W que se projeta para frente e para trás a partir do carro de suporte de peças 2 quando visualizado em plano e suficiente para garantir um piso de trabalho tão grande que um operário possa andar fora de ambas as extremidades dianteira e traseira da peça W.
[022] O carro de suporte de peças 2 e os dois carros auxiliares dianteiro e traseiro 3 e 4 têm respectivos quatro cantos da porção de fundo disposta com as unidades de roda de movimento longitudinal 8a a 8d, 9a a 9d, e 10a a 10d que ser-vem para suportar o carro de suporte de peças 2 e os dois carros auxiliares dianteiro e traseiro 3 e 4 em um par de trilhos guia esquerdo e direito 7a e 7b disposto ao lon-go da primeira trajetória de transporte L1 e permitir que os carros se desloquem apenas em uma direção ao longo dos trilhos guia 7a e 7b. Além das unidades de roda de movimento longitudinal 8a a 8d supramencionadas, o carro de suporte de peças 2 é disposto com as unidades de roda de movimento lateral 11a a 11d para que se desloque perpendicular e horizontalmente em relação à direção de desloca-mento da primeira trajetória de transporte L1, nas posições internas e mais próximas ao centro em relação às respectivas unidades de roda de movimento longitudinal 8a a 8d. Estas unidades de roda de movimento lateral 11a a 11d têm a mesma configu-ração das unidades de roda de movimento longitudinal 8a a 8d e dispostas à medida que a orientação desta for alterada perpendicularmente na direção horizontal.
[023] As unidades de suporte de elevação pareadas 6A e 6B que constituem o meio de suporte de alta posição de peças 5 sobre o carro de suporte de peças 2 são simétricas uma em relação à outra. As unidades de suporte de elevação 6A e 6B são compostas por membros de suporte com formato de haste 13 posicionados paralelos à direção longitudinal da peça W e próximos a ambas as laterais da peça W e por mecanismos de ligação dupla dobráveis no centro 14 que servem para suportar as porções centrais longitudinais dos membros de suporte com formato de haste 13 e mover vertical e paralelamente para cima e para baixo os membros de suporte com formato de haste 13. Os membros de suporte com formato de haste 13 têm ambas as porções de extremidade longitudinal dotadas de braços de suporte de peças projetando-se para dentro 12a e 12b. As unidades de suporte de elevação esquerda e direita pareadas 6A e 6B podem ser comutada entre uma postura de elevação de manter a peça W que foi suportada pelos braços de suporte de peças 12a e 12b em uma posição alta o suficiente para que um operário entre em baixo da peça W conforme mostrado na Figura 3 e na Figura 11 e uma postura dobrada caída sob a peça W e sobre o carro de suporte de peças 2 enquanto os mecanismos de ligação dupla dobráveis no centro 14 são dobrados para dentro conforme mostrado na Figura 4. As unidades de suporte de elevação 6A e 6B na postura de elevação são travadas por um meio de travamento 15 e, então, podem suportar estavelmente a peça W em uma posição alta.
[024] Por outro lado, os dois carros auxiliares dianteiro e traseiro 3 e 4 têm porções de extremidade adjacentes ao carro de suporte de peças 2, no qual porções de extremidade dos meios de suporte de baixa posição de peças 16 e 17 que servem para suportar a peça W em uma posição baixa são proporcionados. Os meios de suporte de baixa posição de peças 16 e 17 são simétricos um em relação ao outro e configurados de tal modo que os membros de suporte com formato de haste 18 paralelos à direção de largura lateral da peça W possam ser suportados por um par de hastes de guia de elevação esquerda e direita 19 e sejam vertical e paralelamente movidos para cima e para baixo através do meio de acionamento de elevação 20 e onde um par de braços de suporte esquerdo e direito 21a e 21b são projetados a partir dos membros de suporte com formato de haste 18 em direção ao carro de su-porte de peças 2. O meio de acionamento de elevação 20 pode ser qualquer estrutu-ra. Conforme mostrado na Figura 5, a estrutura desta modalidade é composta por uma haste propulsora de elevação 22 suportada de modo verticalmente móvel em relação ao carro auxiliar 3 ou 4 e tendo uma extremidade superior unida ao membro de suporte com formato de haste 18, uma engrenagem de cremalheira proporcionada à haste propulsora de elevação 22, uma engrenagem de pinhão combinada com a engrenagem de cremalheira, e um motor equipado com redutor de velocidade 23 que gira e aciona a engrenagem de pinhão em direções dianteiras e inversas. O meio de acionamento de elevação 20 pode mover para cima e para baixo o membro de suporte com formato de haste 18 através da haste propulsora de elevação 22 por uma operação do motor equipado com redutor de velocidade 23 e parar e manter o membro de suporte com formato de haste 18 em qualquer altura.
[025] Além disso, os meios de conexão 24a e 24b conforme mostrado na Fi-gura 2B são respectivamente proporcionados a porções de extremidade adjacentes do carro de suporte de peças 2 e dos carros auxiliares 3 e 4. Os meios de conexão 24a e 24b são compostos por membros engatados 25 que se projetam a partir das porções de extremidade dos carros auxiliares 3 e 4 através de toda a largura destes tendo um formato em L na seção longitudinal, e membros de engate 26 que se pro-jetam a partir de ambas as extremidades do carro de suporte de peças 2 através de toda a largura deste, sendo encaixados aos membros engatados 25 dos carros auxi-liares 3 e 4 a partir de cima, e tendo um formato em L invertido na seção longitudinal. Os membros de engate 26 são configurados para que sejam encaixáveis verti-calmente e separáveis dos membros engatados 25 e, também, relativamente encai-xáveis e separáveis na direção de largura lateral dos respectivos carros 2 a 4.
[026] Adicionalmente, as respectivas superfícies laterais esquerda e direita do carro de suporte de peças 2 e dos carros auxiliares 3 e 4, sendo que ambas as superfícies laterais são paralelas à direção de deslocamento da primeira trajetória de transporte L1, servem como superfícies de acionamento por atrito de movimento longitudinal 27a e 27b. Um membro de placa de tiras de acionamento por atrito 28 perpendicular e horizontal à direção de deslocamento da primeira trajetória de trans-porte L1 é projetado no centro da porção de fundo do carro de suporte de peças 2, ao lado das superfícies de acionamento por atrito de movimento longitudinal 27a e 27b.
[027] De modo subsequente, descreve-se uma trajetória de transporte de pe-ças onde se desloca o corpo de deslocamento de transporte de peças 1 configurado conforme anteriormente. Conforme mostrado na Figura 6, a trajetória de transporte de peças nesta modalidade inclui uma primeira trajetória de transporte a montante L1 e uma primeira trajetória de transporte a jusante L2 em série na mesma linha reta, uma segunda trajetória de transporte voltada para fora L3 perpendicular e hori-zontalmente ramificada a partir de uma extremidade de terminal da primeira trajetória de transporte a montante L1, e uma segunda trajetória de transporte voltada para dentro L4 conectada a uma extremidade de terminal da segunda trajetória de trans-porte voltada para fora L3 e unindo perpendicularmente uma extremidade de início da primeira trajetória de transporte a jusante L2. Além disso, uma trajetória de deslo-camento linear do carro auxiliar L5 é construída entre um ponto de ramificação P1 a partir da primeira trajetória de transporte a montante L1 até a segunda trajetória de transporte voltada para fora L3 e um ponto de encontro P2 a partir da segunda traje-tória de transporte voltada para dentro L4 até a primeira trajetória de transporte a jusante L2. Quando a trajetória de transporte de peças for usada como uma linha de montagem de automóvel, a primeira trajetória de transporte a montante L1 pode ser usada como uma linha de compensação, e as segundas trajetórias de transporte voltadas para fora e para dentro L3 e L4 podem ser usadas como uma linha de chassi, e a primeira trajetória de transporte a jusante L2 pode ser usada como uma linha final. Além disso, uma extremidade de terminal da primeira trajetória de trans-porte a jusante L2 e uma extremidade de início da primeira trajetória de transporte a montante L1 são conectadas por uma primeira trajetória linear de transporte voltada para dentro L6 em paralelo a estas primeiras trajetórias de transporte L1 e L2.
[028] Um par de trilhos guia esquerdo e direito 7a e 7b no qual as rodas pro-porcionadas às respectivas unidades de roda de movimento longitudinal 8a a 8d, 9a a 9d, e 10a a 10d dos carros 2 a 4 do corpo de deslocamento de transporte de peças 1 giram é disposto sobre a primeira trajetória de transporte a montante L1, a primeira trajetória de transporte a jusante L2, e a primeira trajetória de transporte voltada para dentro L6. Um par de trilhos guia esquerdo e direito 29a e 29b no qual as rodas proporcionadas às unidades de roda de movimento lateral 11a a 11d do carro de suporte de peças 2 giram é disposto sobre a segunda trajetória de transporte voltada para fora L3 e a segunda trajetória de transporte voltada para dentro L4. Além disso, elementos de acionamento por atrito 30 que servem para propelir o corpo de deslocamento de transporte de peças 1 através das respectivas superfícies de acionamento por atrito de movimento longitudinal 27a e 27b dos carros 2 a 4 conti-nuando ao longo de todo o comprimento do corpo de deslocamento de transporte de peças 1 são justapostos sobre a primeira trajetória de transporte a montante L1, a primeira trajetória de transporte a jusante L2, e a primeira trajetória de transporte voltada para dentro L6, conforme mostrado nas Figuras 1, 3, e 4. Os elementos de acionamento por atrito 30 são compostos por rodas de acionamento por atrito movi-das a motor 31a e 31b, respectivamente, em contato por pressão com as superfícies de acionamento por atrito de movimento longitudinal 27a e 27b em ambas as laterais.
[029] Um intervalo de instalação na direção da trajetória de deslocamento en-tre os elementos de acionamento por atrito 30 é ajustado de modo correspondente à medida que os corpos de deslocamento de transporte de peças 1 são acionados para se deslocarem em um estado de para-choque com para-choque onde os corpos de deslocamento de transporte dianteiro e traseiro de peças 1 estão um em con-tiguidade com o outro ou à medida que os corpos de deslocamento de transporte de peças 1 são acionados para se deslocarem um a um enquanto mantém um espa-çamento predeterminado dentro eles, conforme mostrado de modo convencional. O corpo de deslocamento de transporte de peças 1 acionado pelas rodas de aciona-mento por atrito movidas a motor 31a e 31b dos elementos de acionamento por atrito 30 se desloca na primeira trajetória de transporte a montante L1 em direção ao ponto de ramificação P1 e para em uma posição fixa onde o carro de suporte de peças 2 é posicionado no ponto de ramificação P1. Dispõe-se neste ponto de ramificação P1 um par de trilhos guia de elevação esquerdo e direito 32a e 32b posicionados imediatamente abaixo das unidades de roda de movimento lateral 11a a 11d do carro de suporte de peças 2 do corpo de deslocamento de transporte de peças 1 tendo parado na posição fixa e um elemento de acionamento por atrito divergente verticalmente móvel 33 posicionado imediatamente abaixo nas adjacências de uma das porções de extremidade do membro de placa de tiras de acionamento por atrito 28, sendo que a porção de extremidade está mais próxima à segunda trajetória de transporte voltada para fora L3, conforme mostrado nas Figuras 7 a 9. O elemento de acionamento por atrito divergente 33 inclui as rodas de acionamento por atrito movidas a motor 34a e 34b conectáveis por pressão a ambas as superfícies laterais do membro de placa de tiras de acionamento por atrito 28.
[030] Os trilhos guia de elevação 32a e 32b e o elemento de acionamento por atrito divergente 33 são instalados em uma base de elevação 36a de um dispositivo de elevação 36 instalado dentro de um fosso subterrâneo 35 localizado imediata-mente abaixo do ponto de ramificação P1. A base de elevação 36a é suportada por um mecanismo de guia de elevação com a finalidade que seja vertical e paralela-mente móvel. O dispositivo de elevação 36 aciona a base de elevação 36a para se mover para cima e para baixo entre um limite descendente e um limite ascendente por um atuador apropriado. Os trilhos guia de elevação 32a e 32b e o elemento de acionamento por atrito divergente 33 que foram rebaixados até o limite descendente focam localizados mais baixos do que as unidades de roda de movimento lateral 11a a 11d e o membro de placa de tiras de acionamento por atrito 28 do carro de suporte de peças 2 que foi aproximado do ponto de ramificação P1 conforme mostrado por uma linha virtual na Figura 8 e na Figura 9, de tal modo que o primeiro não interfira com o último. Além disso, na trajetória de deslocamento do carro auxiliar L5 a partir do ponto de ramificação P1 até o ponto de encontro P2, justapõe-se uma pluralidade de elementos de acionamento por atrito de carro auxiliar 37 que acionam os carros auxiliares 3 e 4 do corpo de deslocamento de transporte de peças 1 que pararam na posição fixa no ponto de ramificação P1 até o ponto de encontro P2 enquanto se mantém um espaçamento entre ambos os carros auxiliares 3 e 4. Cada elemento de acionamento por atrito de carro auxiliar 37 tem a mesma estrutura do elemento de acionamento por atrito 30 e inclui um par de rodas de acionamento por atrito movidas a motor esquerda e direita 38a e 38b conectadas por pressão com respectivas superfícies de acionamento por atrito de movimento longitudinal 27a e 27b dos car-ros auxiliares 3 e 4. Os elementos de acionamento por atrito de carro auxiliar 37 são pluralmente dispostos em paralelo ao longo da trajetória de deslocamento do carro auxiliar L5 em um intervalo mais curto do que todo o comprimento na direção de deslocamento dos carros auxiliares 3 e 4 (todo o comprimento das respectivas su-perfícies de acionamento por atrito de movimento longitudinal 27a e 27b dos carros 3 e 4).
[031] Uma vez que o corpo de deslocamento de transporte de peças 1 alcan-çar o ponto de ramificação P1 e parar, o dispositivo de elevação 36 é operado para elevar os trilhos guia de elevação 32a e 32b e o elemento de acionamento por atrito divergente 33 a partir da altura de limite descendente até a altura de limite ascen-dente. Como resultado disto, os trilhos guia de elevação 32a e 32b erguem vertical e paralelamente o carro de suporte de peças 2 tendo parado na posição fixa no ponto de ramificação P1 através das respectivas rodas das unidades de roda de movimento lateral 11a a 11d do carro de suporte de peças 2. Ao mesmo tempo, o membro de placa de tiras de acionamento por atrito 28 do carro de suporte de peças 2 é relati-vamente encaixado entre as rodas de acionamento por atrito pareadas movidas a motor 34a e 34b do elemento de acionamento por atrito divergente 33, e, portanto, as rodas de acionamento por atrito pareadas movidas a motor 34a e 34b do elemento de acionamento por atrito divergente 33 são colocadas em contato por pressão com ambas as superfícies laterais do membro de placa de tiras de acionamento por atrito 28.
[032] Nota-se que as rodas de acionamento por atrito pareadas movidas a motor 34a e 34b do elemento de acionamento por atrito divergente 33 são preferen-cialmente configuradas para manterem um estado lateralmente aberto até que al-cancem a altura de limite ascendente e se fecharem ao mesmo tempo assim que alcançarem a altura de limite ascendente e entrarem em contato por pressão com ambas as superfícies laterais do membro de placa de tiras de acionamento por atrito 28. Como um assunto óbvio, o elemento de acionamento por atrito divergente 33 pode ser instalado em uma estrutura fixa, mas não na base de elevação 36a de mo-do que para uma das rodas de acionamento por atrito pareadas movidas a motor 34a e 34b, a roda do elemento de acionamento por atrito 34a, que fica posicionada a jusante da primeira trajetória de transporte L1 fique em uma altura suficiente para receber o membro de placa de tiras de acionamento por atrito 28 do carro de suporte de peças 2 que parou na posição fixa no ponto de ramificação P1 e de modo que a outra roda elemento de acionamento por atrito movida a motor 34b que fica posicio-nada a montante da primeira trajetória de transporte L1 seja móvel entre uma posição ativa de retenção do membro de placa de tiras de acionamento por atrito 28 com a roda do elemento de acionamento por atrito 34a e uma posição de recuo estando localizada mais inferior do que uma trajetória em movimento na direção de desloca-mento da primeira trajetória de transporte a montante L1 do membro de placa de tiras de acionamento por atrito 28.
[033] Em qualquer caso, quando o carro de suporte de peças 2 for erguido até uma altura fixa pelos trilhos guia de elevação 32a e 32b no ponto de ramificação P1, as porções de extremidade dos trilhos guia de elevação 32a e 32b no lado da segunda trajetória de transporte voltada para fora L3 passam através das porções divididas entalhadas proporcionadas ao trilho guia 7b, sendo que um dos trilhos guia 7a e 7b da primeira trajetória de transporte a montante L1 atravessa o ponto de ra-mificação P1, sendo que o trilho guia 7b fica localizado mais próximo à segunda tra-jetória de transporte voltada para fora L3, e as porções de extremidade alcançam uma altura de ser conectada aos trilhos guia pareados esquerdo e direito 29a e 29b dispostos na segunda trajetória de transporte voltada para fora L3, conforme mos-trado na Figura 9. Além disso, conforme erguido até a altura fixa, o carro de suporte de peças 2 é separado mais superior do que a roda do elemento de acionamento por atrito 38b dentre as rodas de acionamento por atrito movidas a motor 38a e 38b dos elementos de acionamento por atrito de carro auxiliar 37 dispostos em um intervalo constante na trajetória de deslocamento do carro auxiliar L5, sendo que a roda do elemento de acionamento por atrito 38b fica localizada em uma posição de se sobrepor a uma trajetória de movimento lateral do carro de suporte de peças 2 di-vergida e movendo-se lateralmente em direção à segunda trajetória de transporte voltada para fora L3 a partir do ponto de ramificação P1. Adicionalmente, os meios de conexão 24a e 24b entre o carro de suporte de peças 2 e os carros auxiliares 3 e 4 são colocados em um estado liberado de conexão onde os membros de engate 26 do carro de suporte de peças 2 são separados para cima a partir dos membros en-gatados 25 dos carros auxiliares 3 e 4.
[034] Portanto, as rodas de acionamento por atrito movidas a motor 34a e 34b do elemento de acionamento por atrito divergente 33 são operadas neste estado, e, portanto, o carro de suporte de peças 2 que foi erguido até a altura fixa receber uma força de propulsão a partir do elemento de acionamento por atrito divergente 33 através do membro de placa de tiras de acionamento por atrito 28 e se move lateralmente em direção à segunda trajetória de transporte voltada para fora L3, per-pendicular e horizontalmente a partir do ponto de ramificação P1. A roda do elemen-to de acionamento por atrito movida a motor 38b do elemento de acionamento por atrito de carro auxiliar 37, localizada na altura de se sobrepor à trajetória de movi-mento lateral do carro de suporte de peças 2 neste movimento é proporcionada em uma posição permitida para passar relativamente abaixo do carro de suporte de pe-ças 2 sem interferir nas unidades de roda de movimento longitudinal 8a a 8d, unida-des de roda de movimento lateral 11a a 11d, e membro de placa de tiras de aciona-mento por atrito 28, etc., proporcionadas à porção de fundo do carro de suporte de peças 2 quando o carro de suporte de peças 2 se mover lateralmente em direção à segunda trajetória de transporte voltada para fora L3.
[035] As segundas trajetórias de transporte voltadas para fora e para dentro L3 e L4 são justapostas aos elementos de acionamento por atrito 39 que conduzem o carro de suporte de peças 2 através do membro de placa de tiras de acionamento por atrito 28 deste, conforme mostrado nas Figuras 9 a 12. Os elementos de acionamento por atrito 39 incluem rodas de acionamento por atrito movidas a motor 40a e 40b colocadas em contato por pressão com ambas as superfícies laterais do membro de placa de tiras de acionamento por atrito 28. Um intervalo de instalação na direção de trajetória de deslocamento entre os elementos de acionamento por atrito 39 é ajustada de modo correspondente à medida que os carros de suporte de peças 2 são conduzidos de modo que se desloquem em um estado de para-choque com para-choque onde os carros de suporte dianteiro e traseiro de peças 2 estão em contiguidade entre si ou à medida que os carros de suporte de peças 2 são con-duzidos de modo que se desloquem um por um enquanto se mantém um espaça-mento predeterminado entre eles da mesma maneira que os elementos de aciona-mento por atrito 30 justapostos nas primeiras trajetórias de transporte L1, L2, e L6. Quando o carro de suporte de peças 2 for enviado na segunda trajetória de transpor-te voltada para fora L3 a partir do ponto de ramificação P1 pelo elemento de acio-namento por atrito divergente 33, o membro de placa de tiras de acionamento por atrito 28 do carro de suporte de peças 2 entra entre as rodas de acionamento por atrito movidas a motor 40a e 40b do primeiro elemento de acionamento por atrito 39 antes de as rodas de acionamento por atrito movidas a motor 34a e 34b do elemento de acionamento por atrito divergente 33 serem soltas do membro de placa de tiras de acionamento por atrito 28. De modo subsequente, o carro de suporte de peças 2 de desloca na segunda trajetória de transporte voltada para fora L3 lateralmente pelos elementos de acionamento por atrito 39 proporcionados na segunda trajetória de transporte voltada para fora L3.
[036] O carro de suporte de peças 2 transferido a partir da segunda trajetória de transporte voltada para fora L3 para a segunda trajetória de transporte voltada para dentro L4 é acionado pelos elementos de acionamento por atrito 39 justapostos sobre a segunda trajetória de transporte voltada para dentro L4, e o carro 2 se des-loca na segunda trajetória de transporte voltada para dentro L4 em uma direção in-versa ao deslocamento na segunda trajetória de transporte voltada para fora L3. O carro de suporte de peças 2 é, então, enviado ao ponto de encontro P2 até a primeira trajetória de transporte a jusante L2 pelo último elemento de acionamento por atrito 39 justaposto sobre a segunda trajetória de transporte voltada para dentro L4.
[037] Por outro lado, os dois carros auxiliares dianteiro e traseiro 3 e 4 que fo-ram deixados no ponto de ramificação P1 são enviados sobre a trajetória de deslo-camento do carro auxiliar L5 até o ponto de encontro a jusante P2 pelos elementos de acionamento por atrito de carro auxiliar 37 após o carro de suporte de peças 2 ser enviado a partir do ponto de ramificação P1 até a segunda trajetória de transporte voltada para fora L3. De modo mais específico, os elementos de acionamento por atrito de carro auxiliar 37 são pluralmente dispostos em paralelo ao longo da trajetória de deslocamento do carro auxiliar L5 em um intervalo mais curto do que todo o comprimento na direção de deslocamento dos carros auxiliares 3 e 4 (todo o com-primento das respectivas superfícies de acionamento por atrito de movimento longi-tudinal 27a e 27b dos carros 3 e 4). Portanto, quando os elementos de acionamento por atrito de carro auxiliar 37 forem operados para acionarem os respectivos carros auxiliares 3 e 4 em direção ao ponto de encontro P2 pelas rodas de acionamento por atrito movidas a motor 38a e 38b colocados em contato por pressão com as respec-tivas superfícies de acionamento por atrito de movimento longitudinal esquerda e direita 27a e 27b dos carros auxiliares 3 e 4, ambos os carros auxiliares dianteiros e traseiros 3 e 4 se deslocam na trajetória de deslocamento do carro auxiliar L5 em direção ao ponto de encontro a jusante P2 enquanto mantém um espaçamento entre os mesmos tanto quanto o comprimento na direção de deslocamento da primeira trajetória de transporte a montante L1 do carro de suporte de peças 2. Os elementos de acionamento por atrito de carro auxiliar 37 são dispostos de modo enviem os dois carros auxiliares 3 e 4 em ambas as posições fixas antes e após o ponto de encontro P2. Os dois carros auxiliares 3 e 4 são enviados nas posições fixas antes e após o ponto de encontro P2 a partir da segunda trajetória de transporte voltada para dentro L4 até a primeira trajetória de transporte a jusante L2 e, então, parados.
[038] Por outro lado, o ponto de encontro P2 é dotado de trilhos guia de ele-vação, elemento de acionamento por atrito de encontro, e um dispositivo de elevação que move estes para cima e para baixo, todos idênticos aos trilhos guia de elevação 32a e 32b, o elemento de acionamento por atrito divergente 33, e o dispositivo de elevação 36 que move estes para cima e para baixo proporcionado ao ponto de ramificação P1, embora a ilustração seja omitida. Portanto, quando o carro de suporte de peças 2 for enviado ao ponto de encontro P2 a partir da segunda trajetória de transporte voltada para dentro L4 pelo último elemento de acionamento por atrito 39 no estado onde os carros auxiliares 3 e 4 estão aguardando nas duas posições fixas antes e após o ponto de encontro P2 da primeira trajetória de transporte a jusante L2 conforme descrito anteriormente, os trilhos guia de elevação, o elemento de aciona-mento por atrito de encontro, e o dispositivo de elevação que move estes para cima e para baixo proporcionado ao ponto de encontro P2 são operados por operações inversas àquelas dos trilhos guia de elevação 32a e 32b, o elemento de acionamento por atrito divergente 33, e o dispositivo de elevação 36 que move estes para cima e para baixo no ponto de ramificação P1, e, portanto, o carro de suporte de peças 2 que foi enviado a partir da segunda trajetória de transporte voltada para dentro L4 é tomado pelos trilhos guia de elevação na altura de limite ascendente por meio do elemento de acionamento por atrito de encontro e, então, enviados em uma posição fixa do ponto de encontro P2. Após isto, os trilhos guia de elevação são rebaixados, e as unidades de roda de movimento longitudinal 8a a 8d do carro de suporte de peças 2 são transferidas a ambos os trilhos guia esquerdo e direito 7a e 7b da primeira trajetória de transporte a jusante L2 e, também, o elemento de acionamento por atrito de encontro é escapado para baixo a partir do membro de placa de tiras de acio-namento por atrito 28 do carro de suporte de peças 2. Adicionalmente, os membros de engate 26 dos meios de conexão 24a e 24b no lado do carro de suporte de peças 2 são encaixados nos membros engatados 25 nos lados dos carros auxiliares 3 e 4 por cima.
[039] Uma vez que o carro de suporte de peças 2 for enviado os dois carros auxiliares dianteiro e traseiro 3 e 4 em espera a partir da segunda trajetória de transporte voltada para dentro L4 e os carros 2 a 4 são respectivamente conectados sobre os trilhos guia 7a e 7b da primeira trajetória de transporte a jusante L2 pelos meios de conexão 24a e 24b mediante os quais são reconstituídos ao corpo de des- locamento de transporte de peças original 1 no ponto de encontro P2 na maneira descrita anteriormente, os elementos de acionamento por atrito 30 dispostos na pri-meira trajetória de transporte a jusante L2 são operados, e o corpo de deslocamento de transporte de peças 1 pode ser induzido a se deslocar sobre a primeira trajetória de transporte a jusante L2. O corpo de deslocamento de transporte de peças 1 que alcançou a extremidade de terminal da primeira trajetória de transporte a jusante L2 pode ser enviado de volta à primeira trajetória de transporte a montante L1 após ser induzido a se deslocar através da primeira trajetória de transporte voltada para dentro L6.
[040] Quando o corpo de deslocamento de transporte de peças 1 com os car-ros auxiliares 3 e 4 conectados à parte dianteira e à parte traseira do carro de suporte de peças 2 se deslocar na trajetória de circulação composta pela primeira trajetória de transporte a montante L1, pela primeira trajetória de transporte a jusante L2, e pela primeira trajetória de transporte voltada para dentro L6, conforme mostrado na Figura 1 e na Figura 2, a peça (a carroceria do automóvel) W que foi suportada pelos meios de suporte de alta posição de peças 5 sobre o carro de suporte central de peças 2 é rebaixada dobrando-se os meios de suporte de alta posição de peças 5 e é suportada em uma posição baixa pelos meios de suporte de baixa posição de peças 16 e 17 sobre os carros auxiliares 3 e 4 posicionados abaixo da peça W. Neste momento, os meios de suporte de alta posição de peças 5 sobre o carro de suporte de peças 2 são dobrados para baixo sob a peça W. No entanto, os braços de suporte de peças 12a e 12b que suportaram a peça W são recebidos pelos braços de suporte 21a e 21b dos meios de suporte de baixa posição de peças 16 e 17 sobre os carros auxiliares 3 e 4 antes de os meios de suporte de alta posição de peças 5 serem completamente dobrados para baixo e alcançam a altura de suporte mais baixa. Como resultado, os meios de suporte de baixa posição de peças 16 e 17 suportam a peça W em uma posição baixa predeterminada através dos braços de suporte de peças 12a e 12b dos meios de suporte de alta posição de peças 5.
[041] A peça W é sustentada em uma posição baixa pelos meios de suporte de baixa posição de peças 16 e 17 nos carros auxiliares 3 e 4, conforme descrito anteriormente, por meio dos quais um operário pode transportar uma variedade de trabalhos em relação a uma porção lateral periférica da peça (a carroceria do automóvel) W enquanto avança no corpo de deslocamento de transporte de peças 1, utilizando-se um piso de trabalho largo formado pelos três carros 2 a 4 alinhados na direção de deslocamento e que se estendem horizontalmente a partir de toda a periferia da peça (a carroceria do automóvel) W. Como um assunto óbvio, os meios de suporte de alta posição de peças 5, neste momento, são apenas posicionados, enquanto as unidades de suporte de elevação 6A e 6B destes são dobradas para baixo sob a peça W e os membros de suporte com formato de haste 13 destas se encontram próximos a ambas as laterais da peça W. Deste modo, uma variedade de trabalhos em relação à porção lateral periférica da peça W pode ser formada de maneira segura e fácil, quando comparada ao caso em que colunas grandes se situam em ambos os lados da peça W.
[042] O corpo de deslocamento de transporte de peças 1 que se desloca na primeira trajetória de transporte a montante L1 é interrompido uma vez em uma po-sição de parada fixa que foi ajustada pouco antes do ponto de ramificação P1 a partir da primeira trajetória de transporte a montante L1 até a segunda trajetória de transporte voltada para fora L3. Nesta posição de parada fixa, os elevadores para comutar os meios de suporte de alta posição de peças 5 na postura de elevação são instalados de tal modo que sejam posicionados em ambas as laterais do carro de suporte de peças 2 do corpo de deslocamento de transporte de peças 1 que foram interrompidas na posição de parada fixa. Estes elevadores incluem garfos de deslo-camento F (vide as linhas virtuais na Figura 3 e na Figura 8) horizontalmente móveis para dentro e para fora em relação ao lado inferior dos respectivos membros de su-porte com formato de haste 13 das unidades de suporte de elevação esquerda e direita emparelhadas 6A e 6B dos meios de suporte de alta posição de peças 5. Os garfos de deslocamento F são movidos para cima enquanto inseridos sob os mem-bros de suporte com formato de haste 13 dos meios de suporte de alta posição de peças 5 na postura dobrada que foi sustentada pelos meios de suporte de baixa po-sição de peças 16 e 17 dos carros auxiliares 3 e 4, por meio dos quais os meios de suporte de alta posição de peças 5 são comutados para postura de elevação e são automaticamente travados pelos meios de travamento 15. Na comutação dos meios de suporte de alta posição de peças 5 a partir da postura dobrada até a postura de elevação, esta pode ser configurada, de modo que a peça W seja removida uma vez dos meios de suporte de alta posição de peças 5 através de um dispositivo de trans-ferência dedicado e, então, retornada sobre os meios de suporte de alta posição de peças 5 após os meios de suporte de alta posição de peças 5 serem comutados para a postura de elevação. No entanto, os meios de suporte de alta posição de peças 5 podem ser comutados para a postura de elevação enquanto sustentam a peça W, se possível.
[043] O carro de suporte de peças 2 que foi enviado de maneira perpendicular e horizontal para fora da segunda trajetória de transporte voltada para fora L3, no estado acima, é conduzido de maneira perpendicularmente lateral na segunda traje-tória de transporte voltada para fora L3 e a segunda trajetória de transporte voltada para dentro L4 que continua enquanto sustenta a peça W em uma posição alta com os meios de suporte de alta posição de peças 5 na postura de elevação. Neste mo-mento, tanto as porções de extremidade da peça anteriores como posteriores (a car- roceria do automóvel) W se projetam amplamente a partir do carro de suporte de peças 2 lateralmente em relação à direção de condução, conforme mostrado nas Figuras 10 a 12. Deste modo, se os pisos de trabalho fixos 41 forem colocados nas respectivas laterais das segundas trajetórias de transporte voltadas para fora e para dentro L3 e L4 substancialmente na mesma altura que a superfície de piso do carro de suporte de peças 2, conforme mostrado na Figura 6, então, carros de trabalho carregados com partes de montagem grandes, tais como, motores e unidades de eixo são acionados para se deslocarem nos pisos de trabalho fixos 41 para posicioná-los tanto sob as porções de extremidade anteriores como posteriores da peça (a carroceria do automóvel) W e, então, o trabalho de fixar as partes de montagem grandes nos carros de trabalho às porções de fundo tanto das porções de extremi-dade anteriores como posteriores da peça (a carroceria do automóvel) W pode ser realizado nos pisos de trabalho fixos seguros 41.
[044] O corpo de deslocamento de transporte de peças 1 que foi enviado a partir da segunda trajetória de transporte voltada para dentro L4 para o ponto de en-contro P2 e combinado com os carros auxiliares 3 e 4 no corpo de deslocamento de transporte de peças original 1 novamente é enviado para a primeira trajetória de transporte a jusante L2 neste estado. O corpo de deslocamento de transporte de peças 1 é interrompido uma vez em uma posição de parada fixa que foi ajustada na porção de extremidade inicial da primeira trajetória de transporte a jusante L2, e os meios de suporte de alta posição de peças 5 na postura de elevação são comutados para a postura dobrada pelos elevadores instalados na posição de parada fixa. Os elevadores na posição de parada fixa que foram ajustados na porção de extremidade inicial da primeira trajetória de transporte a jusante L2 incluem meios de liberação de trava para comutar os meios de travamento 15 que foram travados às unidades de suporte de elevação 6A e 6B na postura de elevação dos meios de suporte de alta posição de peças 5 na postura de elevação em um estado liberado de trava en-quanto sustentam os membros de suporte com formato de haste 13 das unidades de suporte de elevação 6A e 6B através dos garfos de deslocamento F. As unidades de suporte de elevação de trava liberada 6A e 6B com os membros de suporte com formato de haste 13 destas sustentados pelos garfos de deslocamento F são dobra-das para dentro através da descida dos garfos de deslocamento F, e os braços de suporte de peças 12a e 12b das unidades de suporte de elevação 6A e 6B são transferidos sobre os braços de suporte 21a e 21b dos meios de suporte de baixa posição de peças 16 e 17 dos carros auxiliares 3 e 4. Os braços de suporte 21a e 21b dos meios de suporte de baixa posição de peças 16 e 17 neste momento são antecipadamente ajustados em alturas predeterminadas. A operação de dobragem destes meios de suporte de alta posição de peças 5 a partir da postura de elevação pode ser realizada no estado em que a peça W é mantida sustentada e pode ser realizada no estado em que a peça W é temporariamente retraída a partir dos meios de suporte de alta posição de peças 5, conforme descrito anteriormente.
[045] Os trabalhos em relação à porção lateral periférica da peça W foram sustentados em uma posição baixa predeterminada pelos meios de suporte de baixa posição de peças 16 e 17 dos carros auxiliares 3 e 4 podem ser realizados quando o corpo de deslocamento de transporte de peças 1 com os três carros 2 a 4 integrados deslocar as primeiras trajetórias de transporte a jusante e a montante L1 e L2, con-forme descrito anteriormente. No entanto, a altura de suporte da peça W pode ser alterada de acordo com os detalhes dos trabalhos. Mais especificamente, os meios de acionamento de elevação 20 dos meios de suporte de baixa posição de peças 16 e 17 são operados para moverem para cima e para baixo os membros de suporte com formato de haste 18, e a altura dos braços de suporte 21a e 21b sustenta a peça W através das unidades de suporte de elevação 6A e 6B (os braços de suporte de peças 12a e 12b) dos meios de suporte de alta posição de peças 5 é alterada, de modo que a altura de suporte da peça W possa ser alterada. Como um assunto ób-vio, as unidades de suporte de elevação 6A e 6B dos meios de suporte de alta posi-ção de peças 5 também aumentam e diminuem com a alteração na altura de suporte de peça dos meios de suporte de baixa posição de peças 16 e 17. Quando a altura de suporte dos meios de suporte de baixa posição de peças 16 e 17 é reduzida mais que a altura de suporte mais baixa na qual as unidades de suporte de elevação 6A e 6B dos meios de suporte de alta posição de peças 5 adotam uma postura comple-tamente dobrada, a peça W é sustentada na altura de suporte mais baixa apenas pelas unidades de suporte de elevação 6A e 6B na postura completamente dobrada. Então, os meios de suporte de baixa posição de peças 16 e 17 se tornam livres.
[046] A estrutura específica das unidades de suporte de elevação 6A e 6B que constituem os meios de suporte de alta posição de peças 5 é descrita em detalhes no pedido de patente japonesa publicado não examinado número 2011-088697, depositado anteriormente pelo presente requerente. Apenas a estrutura será resu-midamente descrita com base na Figura 13. O mecanismo de ligação dupla dobrável no centro 14 de cada unidade de suporte elevado 6A ou 6B é composto por um par de ligações paralelas inferiores 43 interposto entre o carro de suporte de peças 2 e um membro de ligação intermediário 42, e um par de ligações paralelas superiores 45 interposto entre o membro de ligação intermediário 42 e um membro de ligação superior 44. Cada mecanismo de ligação dupla dobrável no centro 14 é justaposto a um meio de travamento 15 composto por um primeiro meio de travamento 46 para controlar um ângulo entre o par de ligações paralelas inferiores 43 e o par de liga-ções paralelas superiores 45 e um segundo meio de travamento 47 para controlar um ângulo entre o par de ligações paralelas inferiores 43 e o carro de suporte de peças 2.
[047] O par de ligações paralelas inferiores 43 é composto por duas ligações 43a e 43b. Ambas as ligações 43a e 43b têm uma extremidade articuladamente sus-tentada, a fim de serem lateralmente osciláveis através de eixos longitudinais e hori-zontais 49a e 49b nos mancais 48a e 48b fixados no carro de suporte de peças 2 à medida que deslocados de maneira longitudinal e lateral. O par de ligações paralelas superiores 45 é composto por duas ligações 45a e 45b dispostas de tal modo que ensanduichem o membro de ligação intermediário 42. Uma extremidade de uma das ligações 45a, uma extremidade livre das ligações 43a do par de ligações paralelas inferiores 43, e uma extremidade do membro de ligação intermediário 42 dispostas de maneira lateralmente horizontal são sustentadas de maneira articulada, a fim de serem osciláveis e conectadas a um eixo longitudinal e horizontal comum 50a. Ao mesmo tempo, uma extremidade da outra ligação 45b, uma extremidade livre da outra ligação 43b do par de ligações paralelas inferiores 43, e a outra extremidade do membro de ligação intermediário 42 dispostas de maneira lateralmente horizontal são sustentadas de maneira articulada, a fim de serem osciláveis e conectadas a um eixo longitudinal e horizontal 50b. O membro de ligação superior 44 dos mecanismos de ligação dupla dobráveis no centro 14 é substancialmente fixado em uma parte central na direção longitudinal do membro de suporte com formato de haste 13 e inclui porções de mancal 44a e 44b abaixo do membro de suporte com formato de haste 13 em porções bilateralmente simétricas em relação ao membro de suporte com formato de haste 13. As outras extremidades de ambas as ligações 45a e 45b do par de ligações paralelas superiores 45 são articuladamente sustentadas, a fim de serem osciláveis e conectadas aos respectivos longitudinal e horizontal 51a e 51b nas porções de mancal 44a e 44b do membro de ligação superior 44.
[048] Conforme configurado acima, cada mecanismo de ligação dupla dobrá- vel no centro 14 tem os eixos esquerdo e direito emparelhados 49a e 49b no lado do carro de suporte de peças 2 e os eixos esquerdo e direito emparelhados 50a e 50b no lado do membro de ligação intermediário 42 posicionados nas respectivas vértices de um paralelogramo inferior e, também, tem os eixos esquerdo e direito empa-relhados 50a e 50b no lado do membro de ligação intermediário 42 e os eixos es-querdo e direito emparelhados 51a e 51b no lado do membro de suporte com formato de haste 13 posicionados nas respectivas vértices de um paralelogramo superior, quando visualizado de frente (Figura 13A). Em uma vista lateral (Figura 13B), as li-gações 45a e 45b do par de ligações paralelas superiores 45 são situadas paralelas, enquanto unem ambos os lados externos do membro de ligação intermediário 42, e as ligações 43a e 43b do par de ligações paralelas inferiores 43 são situadas parale-las, enquanto unem ambos os lados externos das ligações 45a e 45b.
[049] O meio de travamento 15 justaposto a cada mecanismo de ligação dupla dobrável no centro 14 será descrito. O primeiro meio de travamento 46 que constitui este meio de travamento 15 é composto por um membro travado 52 que tem uma extremidade distal cortada em uma porção rebaixada, e uma peça de trava- mento 53 encaixável à, e separável da porção rebaixada. O membro travado 52 é formado por uma placa de tira projetada de maneira fixa em uma direção de extensão da ligação 43a do par de ligações paralelas inferiores 43 a partir da porção de extremidade no lado do membro de ligação intermediário 42 da ligação 43a. A peça de travamento 53 é sustentada de maneira articulada na ligação 45a do par de ligações paralelas superiores 45 através de um eixo 54 ortogonal à direção longitudinal da ligação 45a e paralelo a uma superfície de placa do membro travado 52. O se gundo meio de travamento 47 que constitui o meio de travamento 15 é composto por um orifício bloqueado 55 proporcionados nas proximidades da extremidade inferior da ligação 43a do par de ligações paralelas inferiores 43, a fim de penetrar de ma-neira longitudinal e horizontal e um pino de travamento 57 sustentado de maneira encaixável e separável em relação ao orifício bloqueado 55 por um membro de su-porte 56 montado no carro de suporte de peças 2.
[050] Adicionalmente, cada mecanismo de ligação dupla dobrável no centro 14 é justaposto aos batentes 58 e 59 que limitam um ângulo de expansão do par de ligações paralelas superiores 45 em relação ao par de ligações paralelas inferiores 43. O batente 58 é composto por um membro de batente 58a fixado em uma super-fície lateral da ligação 43a e um membro de batente 58b fixado em uma superfície periférica do lado da porção de extremidade no membro de ligação intermediário 42 da ligação 45a. O limite de ambos os membros de batente 58a e 58b limita um ângulo de expansão entre a ligação 43a do par de ligações paralelas inferiores 43 e a ligação 45a do par de ligações paralelas superiores 45. O batente 59 é composto por um membro de batente 59a fixado em uma superfície lateral da ligação 43b e um membro de batente 59b fixado em uma superfície periférica do lado a porção de ex-tremidade no membro de ligação intermediário 42 da ligação 45b. O limite de ambos os membros de batente 59a e 59b limita um ângulo de expansão entre a ligação 43b do par de ligações paralelas inferiores 43 e a ligação 45b do par de ligações parale-las superiores 45. Obviamente, o ângulo de expansão entre as ligações 43a e 45a e ângulo de expansão entre as ligações 43b e 45b limitados por ambos os batentes 58 e 59 são idênticos. Além disso, cada um dos batentes 58 e 59 pode ser empregado sozinho.
[051] A Figura 13A e a Figura 13B mostram meramente a estrutura básica das unidades de suporte de elevação 6A e 6B dotadas dos mecanismos de ligação dupla dobráveis no centro 14. As unidades de suporte de elevação 6A e 6B podem ser modificadas, conforme descrito no pedido de patente anterior. Como um assunto óbvio, um atuador de acionamento de elevação e rebaixamento pode ser incorpora- do nas unidades de suporte de elevação configuradas acima 6A e 6B.
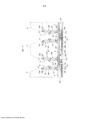
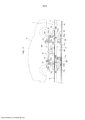
[052] De modo subsequente, outra modalidade dos meios de suporte de baixa posição de peças 16 e 17 nos carros auxiliares 3 e 4 será descrita. Os meios de suporte de baixa posição de peças 16 e 17, conforme mostrado na Figura 14 e na Figura 15, são configurados, de modo que os membros de suporte com formato de haste 18 possam se mover para cima e para baixo através de trilhos de came colo-cados na superfície de piso ao longo da trajetória de deslocamento e mantidos em uma altura de suporte predeterminada, em vez dos meios de acionamento de eleva-ção 20 da modalidade acima. Mais especificamente, os membros de suporte com formato de haste 18 dos meios de suporte de baixa posição de peças 16 e 17 são configurados para terem dois locais próximos a ambas extremidades longitudinais destes fixados com as hastes de elevação 62a, 62b e 63a, 63b que penetram verti-calmente em um par de guias de elevação esquerda e direita 60a, 60b e 61a, 61b fixado aos carros auxiliares 3 e 4. Os roletes seguidores de came 64a, 64b e 65a, 65b respectivamente sustentados de maneira articulada nas extremidades inferiores das hastes de elevação 62a a 63b são configurados para rolarem em um par de trilhos de came esquerdo e direito 66a, 66b e 67a, 67b colocado na superfície de piso ao longo da trajetória de deslocamento. Como um assunto óbvio, ambos os membros de suporte com formato de haste 18 dos meios de suporte de baixa posição de peças 16 e 17 precisam ser movidos para cima e para baixo de maneira síncrona, a fim de manterem sempre a mesma altura. Deste modo, os trilhos de came 66a e 66b se movem para cima e para baixo e controlam os meios de suporte de baixa posição de peças 16 e os trilhos de came 67a e 67b se movem para cima e para baixo e controlam os meios de suporte de baixa posição de peças 17 têm o mesmo formato e o mesmo tamanho e são colocados, enquanto deslocados na direção de desloca-mento do carro através de um intervalo na direção de deslocamento do carro entre os meios de suporte de baixa posição de peças 16 e 17.
[053] De acordo com os meios de suporte de baixa posição de peças 16 e 17 controlados pelos trilhos de came, a altura dos trilhos de came 66a, 66b e 67a, 67b é alterada em cada seção específica junto com o deslocamento do corpo de desloca-mento de transporte de peças 1, por meio da qual a altura da peça W sustentada pelos meios de suporte de baixa posição de peças 16 e 17 pode ser automaticamente alterada em cada seção.
[054] Ainda outra modalidade dos meios de suporte de baixa posição de peças 16 e 17, conforme mostrado nas Figuras 16 a 18, será descrita. Nestes meios de suporte de baixa posição de peças 16 e 17, três corpos de suporte de peças 68 a 70 que têm alturas de suporte diferentes H1 a H3 são usados. Os corpos de suporte de peças 68 a 70 são formados por materiais de armação de portal mutuamente encai-xados, de tal modo que aquele com a altura de suporte mais alta seja situado em um lado mais externo. Os corpos de suporte de peças 68 a 70 têm ambas as porções de perna cujas extremidades inferiores são sustentadas de maneira articulada em por-ções de extremidade adjacentes ao carro de suporte de peças 2 dos carros auxiliares 3 e 4 por um par de eixos lateralmente horizontais esquerdo e direito 71a e 71b, a fim de aumentarem e diminuírem. A partir de ambas as porções de perna dos respectivos corpos de suporte de peças 68 a 70, são continuamente proporcionados braços de batente 68a a 70a que se estendem acima do carro de suporte de peças adjacentes 2 quando os respectivos corpos de suporte de peças 68 a 70 adotarem um postura de suporte em elevação. As porções de contato 68b a 70b que encostam na superfície superior do carro de suporte de peças 2 são proporcionadas no lado inferior dos braços de batente 68a a 70a.
[055] De acordo com os meios de suporte de baixa posição de peças configu-rados acima 16 e 17, um dos corpos de suporte de peças 68 a 70 que é selecionado com base na altura H1 a H3 na qual a peça W será sustentada, por exemplo, o corpo de suporte de peça 69 com uma altura de suporte intermediária H2 é girado e elevado ao redor dos eixos lateralmente horizontais 71a e 71b, e as porções de con-tato 69b dos braços de batente 69a são produzidas para encostarem na superfície superior do carro de suporte de peças adjacente 2. Outro corpo de suporte de peça 68 com a altura de suporte H1 e corpo de suporte de peça 70 com a altura de supor- te H3 são produzidos para girar e descer ao redor dos eixos lateralmente horizontais 71a e 71b em direção às superfícies superiores dos carros auxiliares 3 e 4. A postura de elevação do corpo de suporte de peça 69 e a postura de descida dos corpos de suporte de peças 68 e 70 são respectivamente mantidas pela gravidade. Para alterar a altura de suporte de peça, o corpo de suporte de peça 68 com a menor altura de suporte H1 ou o corpo de suporte de peça 70 com a maior altura de suporte H3 é elevado, e as porções de contato 68b dos braços de batente 68a ou as porções de contato 70b dos braços de batente 70a são produzidas para encostarem na su-perfície superior do carro de suporte de peças adjacente 2. O corpo de suporte de peça 69 com a altura de suporte intermediária H2 é comutado para a postura de descida. Os corpos de suporte de peças 68 a 70 são configurados, de modo que as extremidades superiores (porções de suporte de peça) destes sejam posicionadas ligeiramente mais próximas ao lado de carro de suporte de peças 2 que as posições imediatamente acima dos eixos lateralmente horizontais 71a e 71b quando adotam a postura de elevação.
[056] Na configuração acima, quando dobradas para baixo, ambas as unida-des de suporte de elevação 6A e 6B dos meios de suporte de alta posição de peças 5 do carro de suporte de peças 2 são sustentadas por um dos corpos de suporte de peças 68 a 70 dos meios de suporte de baixa posição de peças 16 e 17, cujo corpo de suporte de peça é mantido na postura de elevação. Na modalidade mostrada, ambas as porções de extremidade de projeção anterior e posterior dos membros de suporte com formato de haste 13 de ambas as unidades de suporte de elevação 6A e 6B são configuradas para serem sustentadas pelos corpos de suporte de peças 68 a 70. Deste modo, a peça W que foi sustentada pelas unidades de suporte de elevação 6A e 6B na postura dobrada dos meios de suporte de alta posição de peças 5 é sustentada na altura de suporte dos meios de suporte de baixa posição de peças 16 e 17 nos carros auxiliares 3 e 4 através dos quais as unidades de suporte de eleva-ção 6A e 6B são sustentadas através dos membros de suporte com formato de haste 13, ou seja, na altura de suporte H1 a H3 um corpo de suporte de peça que foi mantido na postura de elevação entre os corpos de suporte de peças 68 a 70 dos meios de suporte de baixa posição de peças 16 e 17. Neste momento, uma carga descendente que atuou no corpo de suporte de peça 68 a 70 na postura de elevação que sustenta a peça W através das unidades de suporte de elevação 6A e 6B não é apenas recebida pelas porções de extremidade dos carros auxiliares 3 e 4, mas, também, sustentada em ambas as porções de extremidade do carro de suporte de peças 2 através das porções de contato 68b a 70b dos braços de batente 68a a 70a. Como resultado, a estabilidade dos carros auxiliares 3 e 4 é aumentada.
[057] Nota-se que a configuração dos meios de suporte de baixa posição de peças 16 e 17 proporcionada para os carros auxiliares 3 e 4 não deve ser restrita àquelas respectivas modalidades descritas acima. Uma variedade de dispositivos de suporte de elevação referida, por exemplo, como um macaco, um elevador, no qual a comutação da altura de suporte é realizada por força de trabalho, um acionamento de cilindro de pressão de fluido, um acionamento de motor drive, ou similar, pode ser usado. Adicionalmente, embora a ilustração seja omitida, esta pode ser configurada, de modo que a altura de suporte dos meios de suporte de baixa posição de peças 16 e 17 dos carros auxiliares 3 e 4 seja alterada por meios de acionamento de elevação instalados no lado do piso enquanto o corpo de deslocamento de transporte de peças 1 é interrompido na posição de parada fixa na trajetória de deslocamento. Neste caso, esta precisa ser configurada, de modo que o corpo de deslocamento de transporte de peças 1 possa passar acima dos meios de acionamento de elevação no lado do piso sem problemas quando os meios de acionamento de elevação se encontrarem em um estado de espera. Além disso, os meios de suporte de baixa posição de peças 16 e 17 passíveis de alteração na altura de suporte ao serem mo-vidos para cima e para baixo através dos meios de acionamento de elevação no lado do piso são configurados para serem automaticamente travados em uma altura de suporte alterada. O travamento é configurado para ser automaticamente liberado quando os meios de suporte de baixa posição de peças 16 e 17 forem movidos para cima e para baixo através dos meios de acionamento de elevação no lado do piso. Como um assunto óbvio, este pode ser configurado, de modo que as hastes de ele-vação que se movem em sincronização com as porções de suporte de peça verti-calmente móveis dos meios de suporte de baixa posição de peças 16 e 17 sejam projetadas sob os carros auxiliares 3 e 4 e as hastes de elevação sejam movidas para cima e para baixo através dos meios de acionamento de elevação no lado do piso. Uma vez que as porções de extremidade dos carros auxiliares 3 e 4 dotadas dos meios de suporte de baixa posição de peças 16 e 17 se situam embaixo da peça sustentada W, tal configuração também é possível pelo fato de que as porções de extremidade dos carros auxiliares 3 e 4 são dotadas de aberturas, através das quais os membros de elevação dos meios de acionamento de elevação no lado do piso se movem verticalmente, e pelo fato de que os membros de elevação sustentam dire-tamente e movem para cima e para baixo as porções de suporte de peça que se movem verticalmente dos meios de suporte de baixa posição de peças 16 e 17.
[058] O Dispositivo de transporte de peças da presente invenção pode ser efetivamente utilizado como uma linha de montagem de automóvel composta por uma linha de compensação e uma linha final onde os trabalhos em relação a uma porção lateral periférica de uma carroceria do automóvel são realizados e uma linha de chassi, onde o trabalho de montagem de partes de montagem grandes conduzi-das por carros, tais como, motores e unidades de eixo, em relação ao lado inferior de ambas as porções de extremidade anterior e posterior da carroceria do automóvel é realizado. DESCRIÇÃO DOS SÍMBOLOS DE REFERÊNCIA 1: corpo de deslocamento de transporte de peças 2: carro de suporte de peças 3: 4: carro auxiliar 5: meios de suporte de alta posição de peças 8a - 8d, 9a - 9d, 10a - 10d: unidade de roda de movimento longitudinal 7a, 7b, 29a, 29b: trilho guia 11a - 11d: unidade de roda de movimento lateral 12a, 12b: braço de suporte de peças 13, 18: membro de suporte com formato de haste 14, mecanismo de ligação dupla dobrável no centro 15, meios de travamento 16, 17: meios de suporte de baixa posição de peças 20: meios de acionamento de elevação 21a, 21b: braço de suporte 23: motor equipado com redutor de velocidade 24: meios de conexão 27a, 27b: superfície de acionamento por atrito de movimento longitudinal 28: membro de placa de tiras de acionamento por atrito 30, 33, 37, 39: elemento de acionamento por atrito 32a, 32b: trilho guia de elevação 36: dispositivo de elevação 41: piso de trabalho fixo 60a - 61b: guia de elevação 62a - 63b: haste de elevação 64a - 65b: rolete seguidor de came 66a - 67b: trilho de came 68a - 70a: braço de batente 68b - 70b: porção de contato L1: primeira trajetória de transporte a montante L2: primeira trajetória de transporte a jusante L3: segunda trajetória de transporte voltada para fora L4: segunda trajetória de transporte voltada para dentro L5: trajetória de deslocamento do carro auxiliar L6: primeira trajetória de transporte voltada para dentro P1: ponto de ramificação P2: ponto de encontro W: peça (carroceria do automóvel)
Claims (7)
1. Dispositivo de transporte de peças CARACTERIZADO pelo fato de que compreende: uma trajetória de transporte de peças que compreende uma primeira trajetória de transporte (L1) e uma segunda trajetória de transporte (L3) ramificada perpen-dicularmente e horizontalmente em relação à primeira trajetória de transporte (L1); um corpo de deslocamento de transporte de peças (1) que se desloca sobre a trajetória de transporte de peças e é composto por um carro de suporte de peças (2) que suporta uma porção central longitudinal de uma peça (W) cuja direção longi-tudinal é paralela à primeira trajetória de transporte (L1) e dois carros auxiliares (3, 4) conectáveis de forma liberável a uma parte dianteira e uma parte traseira em uma direção de deslocamento da primeira trajetória de transporte (L1) do carro de suporte de peças (2) e são posicionados abaixo de ambas as porções de extremidade longitudinais da peça (W); um meio de condução do corpo de deslocamento de transporte de peças (30) justaposto sobre a primeira trajetória de transporte (L1) para conduzir o carro de suporte de peças (2) e os dois carros auxiliares (3, 4) de modo que se desloquem integralmente; um meio de divergência de carro (32a, 32b, 33) disposto em um ponto de ramificação entre a primeira trajetória de transporte (L1) e a segunda trajetória de transporte (L3) de modo a deixar os dois carros auxiliares (3, 4) sobre a primeira tra-jetória de transporte (L1) e divergir e introduzir apenas o carro de suporte de peças (2) perpendicularmente e horizontalmente na segunda trajetória de transporte (L3); e um meio de condução do carro de suporte de peças (39) justaposto sobre a segunda trajetória de transporte (L3) para conduzir o carro de suporte de peças (2) a se deslocar perpendicularmente e horizontalmente em relação à direção de deslo-camento do carro de suporte de peças (2) sobre a primeira trajetória de transporte (L1); em que o carro de suporte de peças (2) é dotado de um meio de suporte de alta posição de peças (5) configurado para ser comutável entre uma postura de elevação de suporte da peça (W) em uma posição alta e uma postura dobrada caída sob a peça (W) e no carro de suporte de peças (2), e os dois carros auxiliares (3, 4) são dotados de meios de suporte de baixa posição de peças (16, 17) configurados para suportarem individualmente a parte dianteira e a parte traseira em dois locais na direção longitudinal da peça (W) sob a peça (W) e em uma posição mais alta que os meios de suporte de alta posição de peças (5) na postura dobrada.
2. Dispositivo de transporte de peças, de acordo com a reivindicação 1, CARACTERIZADO pelo fato de que o meio de suporte de alta posição de peças (5) sobre o carro de suporte de peças (2) é movido para cima e para baixo através de um elevador localizado ao longo da trajetória de deslocamento enquanto suporta a peça (W), e o meio de suporte de alta posição de peças (5) é dotado de um meio de travamento (15) para travar na postura de elevação de suporte da peça (W) em uma posição alta.
3. Dispositivo de transporte de peças, de acordo com a reivindicação 1, CARACTERIZADO pelo fato de que os meios de suporte de baixa posição de peças (16, 17) sobre os dois carros auxiliares (3, 4) suportam a peça (W) através dos meios de suporte de alta posição de peças (5) sobre o carro de suporte de peças (2).
4. Dispositivo de transporte de peças, de acordo com a reivindicação 1, CARACTERIZADO pelo fato de que os meios de suporte de baixa posição de peças (16, 17) sobre os dois carros auxiliares (3, 4) são de uma estrutura de altura de su-porte variável que pode suportar a peça (W) em uma pluralidade de alturas maiores que os meios de suporte de alta posição de peças (5) na postura dobrada.
5. Dispositivo de transporte de peças, de acordo com a reivindicação 1, CARACTERIZADO pelo fato de que os meios de suporte de baixa posição de peças (16, 17) sobre os dois carros auxiliares (3, 4) são dotados de membros de suporte verticalmente móveis (18), e os membros de suporte (18) são mantidos em uma altura de suporte de peça pelos trilhos de came (66a a 67b) dispostos no lado da trajetória de deslocamento.
6. Dispositivo de transporte de peças, de acordo com a reivindicação 1, CARACTERIZADO pelo fato de que os meios de suporte de baixa posição de peças (16, 17) sobre os dois carros auxiliares (3, 4) são dotados de corpos de suporte de peças (68 a 70) que são suportados de modo articulado sobre as porções de extre-midade dos respectivos carros auxiliares (3, 4) adjacentes ao carro de suporte de peças (2) de modo que sejam elevados e rebaixados, e os corpos de suporte de pe-ças (68b a 70b) são continuamente dotados de porções de contato que estão em contiguidade com o carro de suporte de peças adjacente (2) quando os corpos de suporte de peças (68 a 70) estiverem em uma postura de suporte de peça.
7. Dispositivo de transporte de peças, de acordo com a reivindicação 1, CARACTERIZADO pelo fato de que os dois carros auxiliares (3, 4) dianteiro e traseiro e têm o mesmo comprimento e largura lateral, e a largura lateral destes é igual àquela do carro de suporte de peças (2) e o comprimento destes na direção de des-locamento da primeira trajetória de transporte (L1) é suficiente para se projetar de modo mais dianteiro e traseiro para fora do que ambas as extremidades dianteira e traseira da peça (W) que se projeta para frente e para trás a partir do carro de suporte de peças (2), quando visualizado em plano, e suficiente para fornecer um piso de trabalho para permitir que um operário possa andar no mesmo fora de ambas as extremidades dianteira e traseira da peça (W).
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010071858A JP5273564B2 (ja) | 2010-03-26 | 2010-03-26 | ワーク搬送設備 |
| JP2010-071858 | 2010-03-26 | ||
| PCT/JP2011/050875 WO2011118246A1 (ja) | 2010-03-26 | 2011-01-19 | ワーク搬送設備 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112012019896A2 BR112012019896A2 (pt) | 2020-11-10 |
| BR112012019896B1 true BR112012019896B1 (pt) | 2021-09-21 |
Family
ID=44672824
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112012019896-3A BR112012019896B1 (pt) | 2010-03-26 | 2011-01-19 | Dispositivo de transporte de peças |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US8459438B2 (pt) |
| JP (1) | JP5273564B2 (pt) |
| CN (1) | CN102803106B (pt) |
| BR (1) | BR112012019896B1 (pt) |
| MX (1) | MX2012009684A (pt) |
| TR (1) | TR201209891T1 (pt) |
| WO (1) | WO2011118246A1 (pt) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010045010A1 (de) * | 2010-09-10 | 2012-03-15 | Eisenmann Ag | Fördereinheit und Fördersystem zum Fördern von Fahrzeugkarosserien sowie Anlage zur Behandlung von Fahrzeugkarosserien |
| ITTO20111011A1 (it) | 2011-11-03 | 2013-05-04 | Fiat Group Automobiles Spa | Linea di assemblaggio di autoveicoli |
| CN104321161B (zh) * | 2012-05-11 | 2016-08-24 | 本田技研工业株式会社 | 车身用部件安装系统 |
| JP2014190114A (ja) * | 2013-03-28 | 2014-10-06 | Daifuku Co Ltd | 搬送用走行体の走行経路構造 |
| CN104554514A (zh) * | 2013-10-22 | 2015-04-29 | 株式会社椿本链条 | 搬送装置 |
| CN106312405A (zh) * | 2015-07-02 | 2017-01-11 | 王婧 | 无源台车的支撑无极机构 |
| DE102015214980A1 (de) * | 2015-08-06 | 2017-02-09 | Universität Stuttgart | Fahrerlose Transportvorrichtung zur Montage eines Kraftfahrzeugs und Verfahren zum Abladen eines Kraftfahrzeugs von einem solchen Transportfahrzeug |
| JP6429029B2 (ja) * | 2015-12-01 | 2018-11-28 | 株式会社ダイフク | ラックギヤ駆動可能な搬送装置 |
| DE102017103931A1 (de) | 2017-02-24 | 2018-08-30 | Eisenmann Se | Fördersystem und Verfahren zum gleichzeitigen Transport von Werkstücken und Werkern |
| CN106826069B (zh) * | 2017-03-21 | 2019-05-03 | 广汽本田汽车有限公司 | 汽车零件装焊平台及其汽车零件预置台和焊接平台 |
| CN108190458B (zh) * | 2018-01-31 | 2024-02-13 | 山东拓展智能装备制造有限公司 | 一种双层升降旋转滚床 |
| DE102018109934A1 (de) * | 2018-04-25 | 2019-10-31 | Eisenmann Se | Behandlungsanlage zum Behandeln von Werkstücken |
| JP7159956B2 (ja) * | 2019-04-11 | 2022-10-25 | トヨタ紡織株式会社 | 台車 |
| WO2021085090A1 (ja) * | 2019-11-01 | 2021-05-06 | 平田機工株式会社 | トラバーサ、ベースユニット及び移動ユニット |
| DE102019130160A1 (de) * | 2019-11-08 | 2021-05-12 | Ebz Systec Gmbh | Fördereinrichtung zum Transport und zur Positionierung von Bauteilen und Verfahren zum Transport und zum Positionieren von Bauteilen mit einer Fördereinrichtung |
| CN113816089B (zh) * | 2021-09-18 | 2022-12-13 | 德州职业技术学院(德州市技师学院) | 一种新能源汽车用电池转运装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2762179B2 (ja) | 1991-06-07 | 1998-06-04 | 関東自動車工業株式会社 | 搬送台車の自動搬送装置 |
| JPH0741161A (ja) * | 1993-07-29 | 1995-02-10 | Toyota Motor Corp | コンベヤにおける移動体搬送方向変換装置及び移動体連結確認装置 |
| CA2128918C (en) | 1993-07-29 | 1999-09-21 | Eiji Orisaka | Conveying system and method for a production line |
| GB2302072B (en) * | 1993-07-29 | 1997-06-04 | Toyota Motor Co Ltd | Conveying system and method for a production line |
| JP2000229727A (ja) * | 1999-02-09 | 2000-08-22 | Uni Harts Kk | 台車移送装置 |
| US6505726B1 (en) * | 2001-06-29 | 2003-01-14 | Valiant Corporation | Soft touch lifter |
| JP4984147B2 (ja) * | 2007-06-27 | 2012-07-25 | 株式会社ダイフク | 物品処理システム |
| JP4958003B2 (ja) * | 2007-08-24 | 2012-06-20 | 株式会社ダイフク | 搬送台車利用の作業設備 |
| JP5077582B2 (ja) * | 2009-02-26 | 2012-11-21 | 株式会社ダイフク | 搬送装置 |
| JP5327473B2 (ja) | 2009-10-21 | 2013-10-30 | 株式会社ダイフク | ワーク昇降支持装置 |
-
2010
- 2010-03-26 JP JP2010071858A patent/JP5273564B2/ja active Active
-
2011
- 2011-01-19 CN CN201180014051.4A patent/CN102803106B/zh active Active
- 2011-01-19 MX MX2012009684A patent/MX2012009684A/es active IP Right Grant
- 2011-01-19 TR TR2012/09891T patent/TR201209891T1/xx unknown
- 2011-01-19 BR BR112012019896-3A patent/BR112012019896B1/pt active IP Right Grant
- 2011-01-19 WO PCT/JP2011/050875 patent/WO2011118246A1/ja active Application Filing
-
2012
- 2012-07-26 US US13/559,239 patent/US8459438B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US8459438B2 (en) | 2013-06-11 |
| JP2011201455A (ja) | 2011-10-13 |
| CN102803106B (zh) | 2014-09-10 |
| BR112012019896A2 (pt) | 2020-11-10 |
| CN102803106A (zh) | 2012-11-28 |
| JP5273564B2 (ja) | 2013-08-28 |
| MX2012009684A (es) | 2012-10-15 |
| TR201209891T1 (tr) | 2013-01-21 |
| WO2011118246A1 (ja) | 2011-09-29 |
| US20120285797A1 (en) | 2012-11-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112012019896B1 (pt) | Dispositivo de transporte de peças | |
| KR101021998B1 (ko) | 레그식 로봇 | |
| BRPI0512772B1 (pt) | Loading equipment with lifting support table of loaded object | |
| JP5212836B2 (ja) | ワーク搬送設備 | |
| JP2011201455A5 (pt) | ||
| CN103101737A (zh) | 一种沿交叉轨道行走的穿梭车 | |
| JP5077582B2 (ja) | 搬送装置 | |
| JP5472824B2 (ja) | 自動車組立てラインにおける車体搬送台車 | |
| TW201400396A (zh) | 天花板搬送車及物品搬送設備 | |
| JP5478138B2 (ja) | コンクリート製品の搬送敷設装置 | |
| JP3696407B2 (ja) | 搬送装置におけるストッパ操作装置 | |
| JP2006176085A (ja) | 吊下搬送装置 | |
| CN114222699B (zh) | 搬运装置 | |
| JP4196328B2 (ja) | 搬送装置 | |
| JPS62218305A (ja) | 自動車ボデイのリフテイング台車 | |
| JP5532262B2 (ja) | 自動車組立てラインにおける車体搬送台車 | |
| TWI599536B (zh) | 天花板搬送車 | |
| JP4395730B2 (ja) | 搬送台車の経路変更移動装置 | |
| JP2015080820A (ja) | ワーク搬送装置 | |
| JP4450200B2 (ja) | 昇降機能付き搬送台車 | |
| JP5682538B2 (ja) | エンジン搭載装置 | |
| JP5785289B2 (ja) | 搬送装置 | |
| JP2596308Y2 (ja) | 運搬車の荷台昇降装置 | |
| JP3324828B2 (ja) | 車体へのダンパ組付補助装置 | |
| JP3562803B2 (ja) | 船外機生産設備 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B06A | Patent application procedure suspended [chapter 6.1 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 19/01/2011, OBSERVADAS AS CONDICOES LEGAIS. PATENTE CONCEDIDA CONFORME ADI 5.529/DF, QUE DETERMINA A ALTERACAO DO PRAZO DE CONCESSAO. |